A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter

Abstract
1. Introduction
2. Relationship between Velocity and Redshift in the East-North-Up Geographical Frame
3. Model of the INS/SRS/CNS Integrated Navigation System
3.1. Kinematic Model of the INS/SRS/CNS Integrated Navigation System
3.2. Measurement Model of the INS/SRS/CNS Integrated Navigation System
4. The Chi-Square Test-Based Robust Kalman Filter
4.1. The Traditional Kalman Filter
4.2. CST-Based Noise Estimator for Measurement
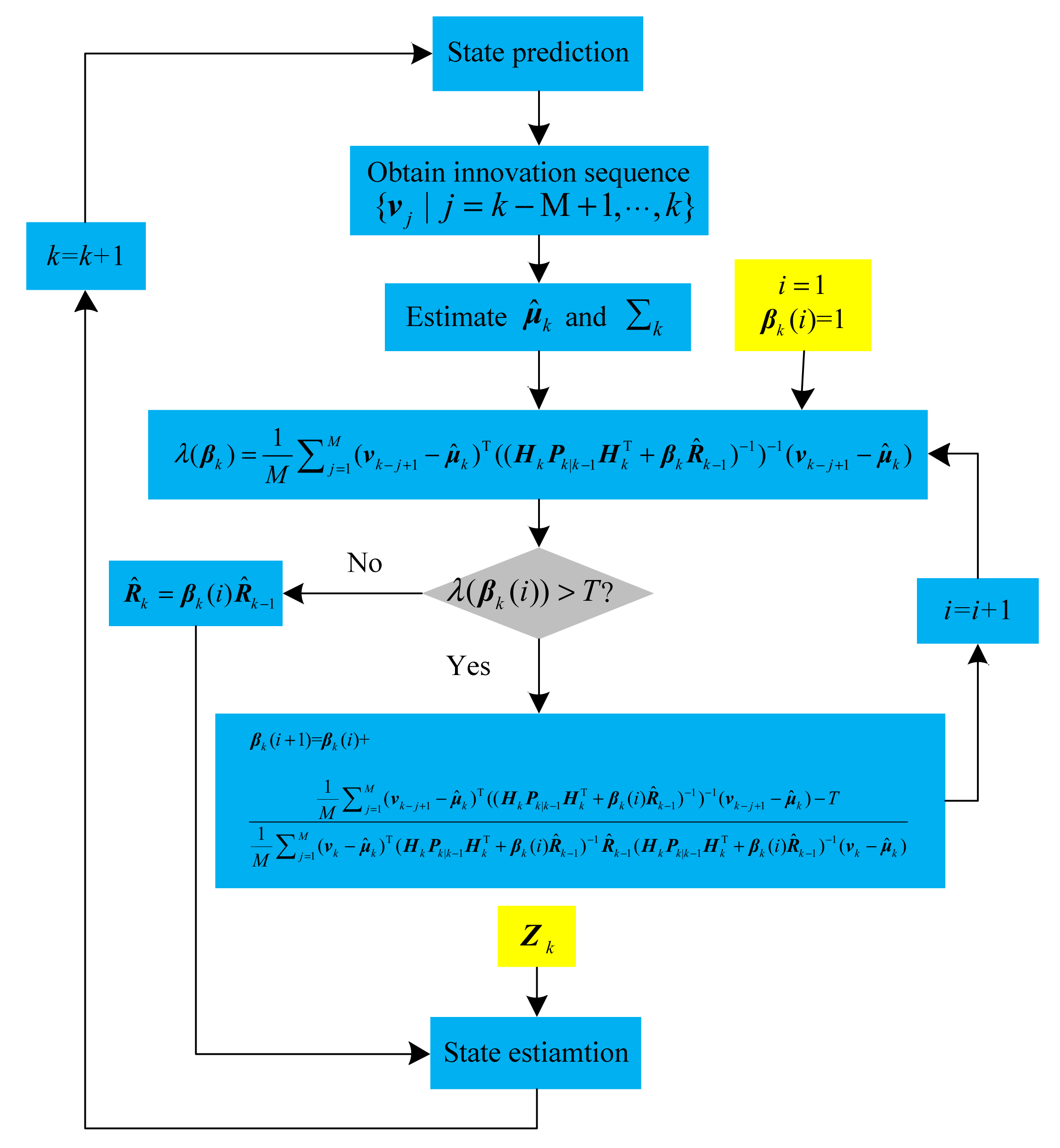
4.3. Procedure of the CSTRKF
5. Simulation and Results
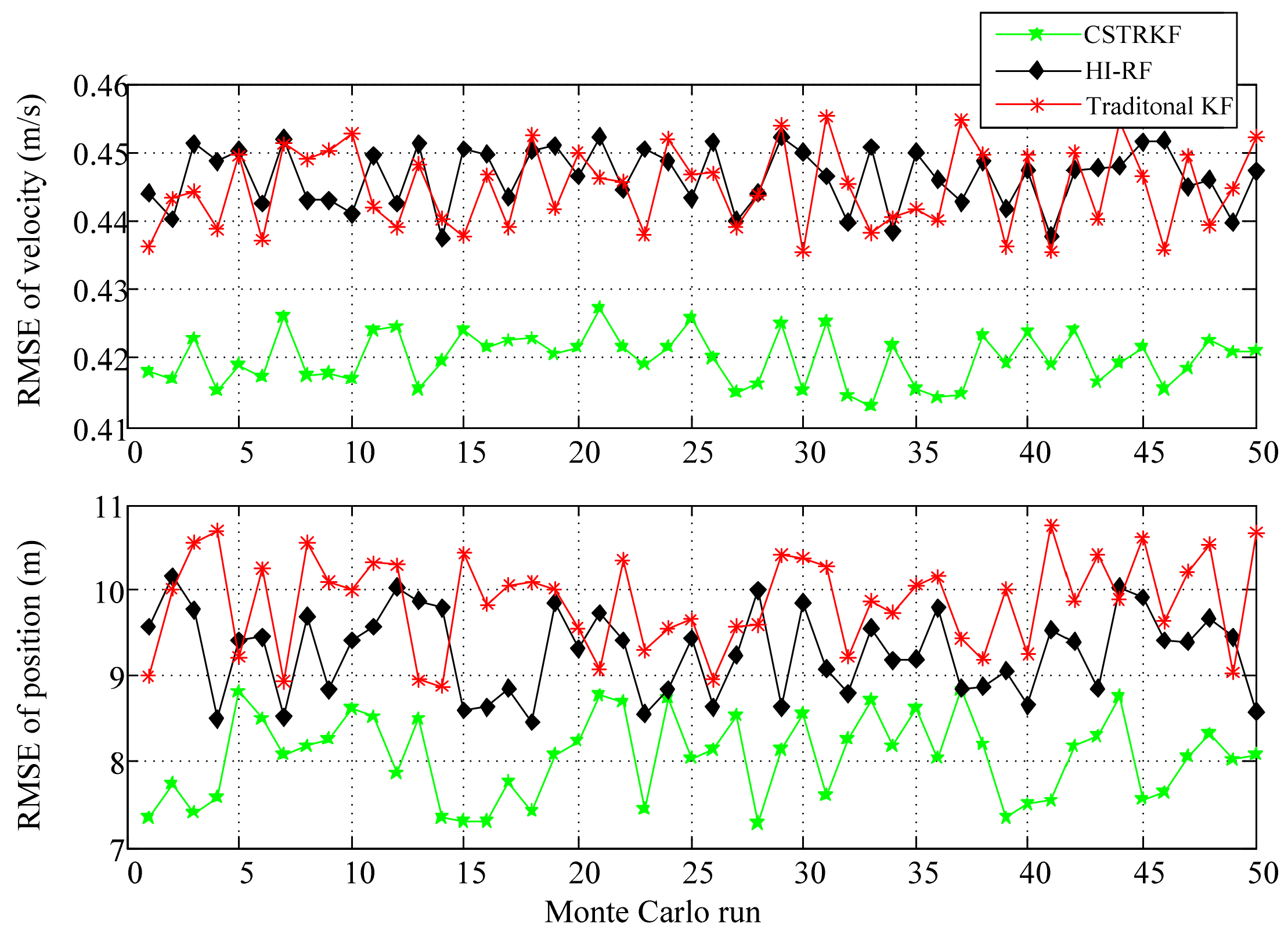
5.1. Evaluation of CSTRKF under the Condition of Measurements with Outliers
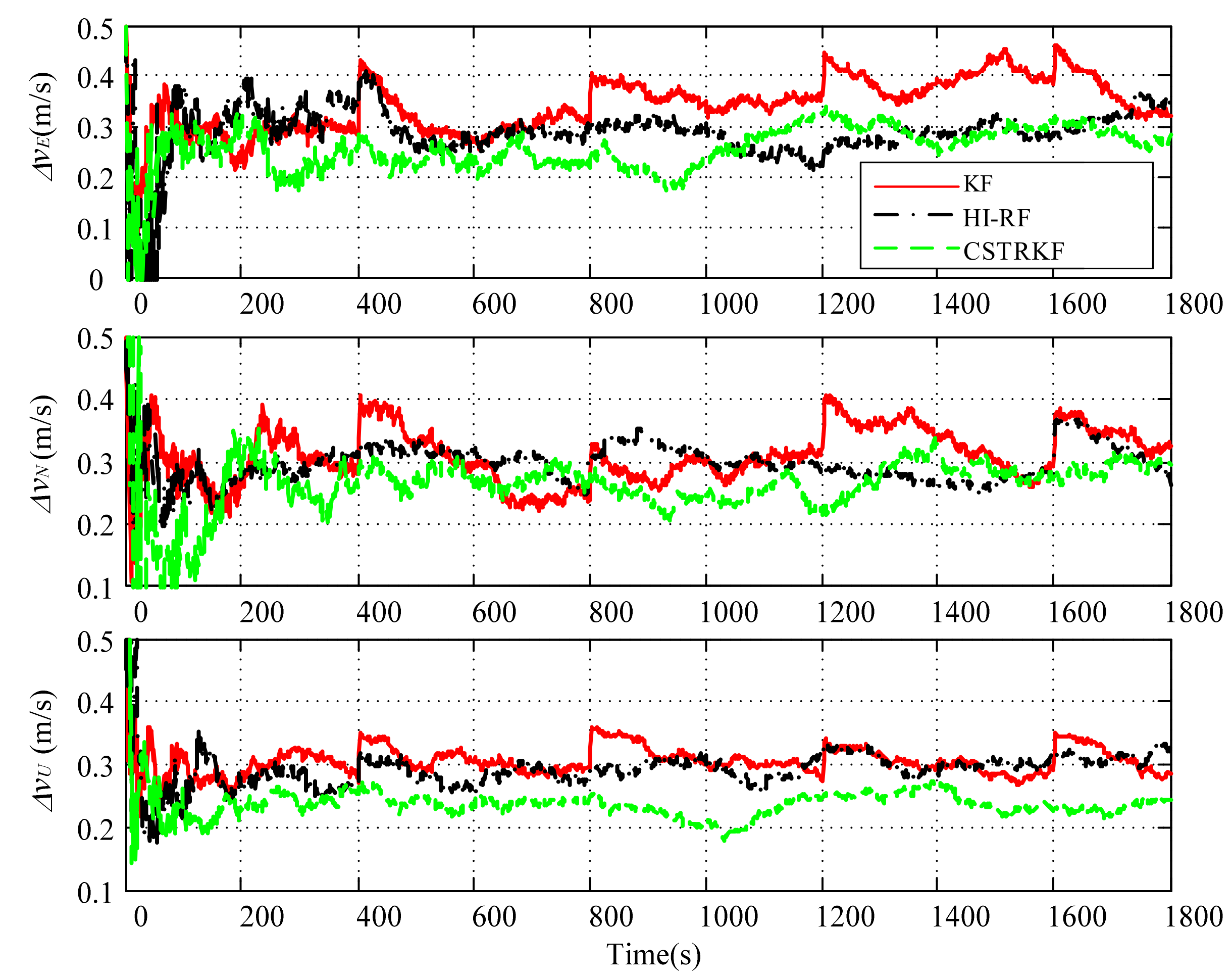
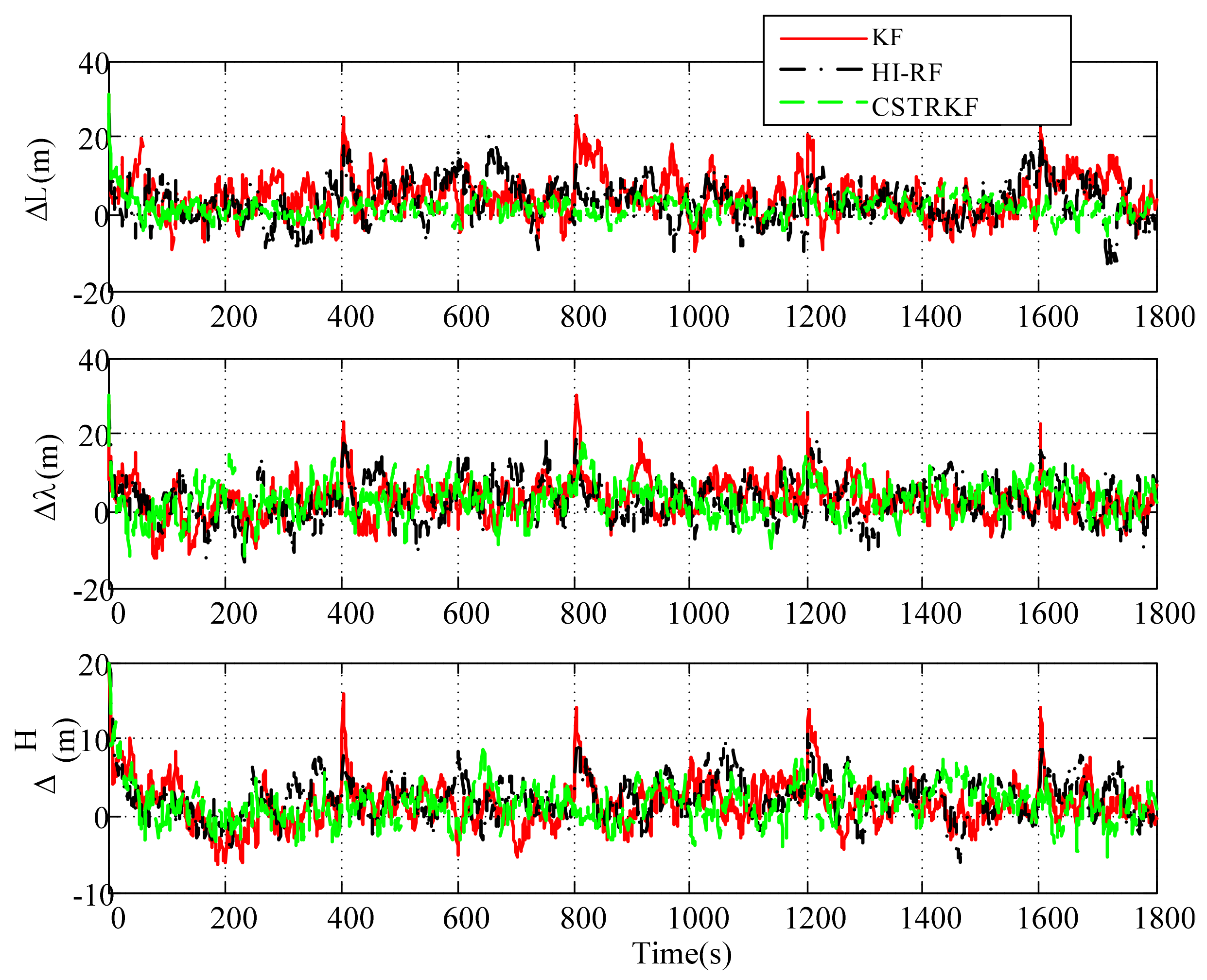
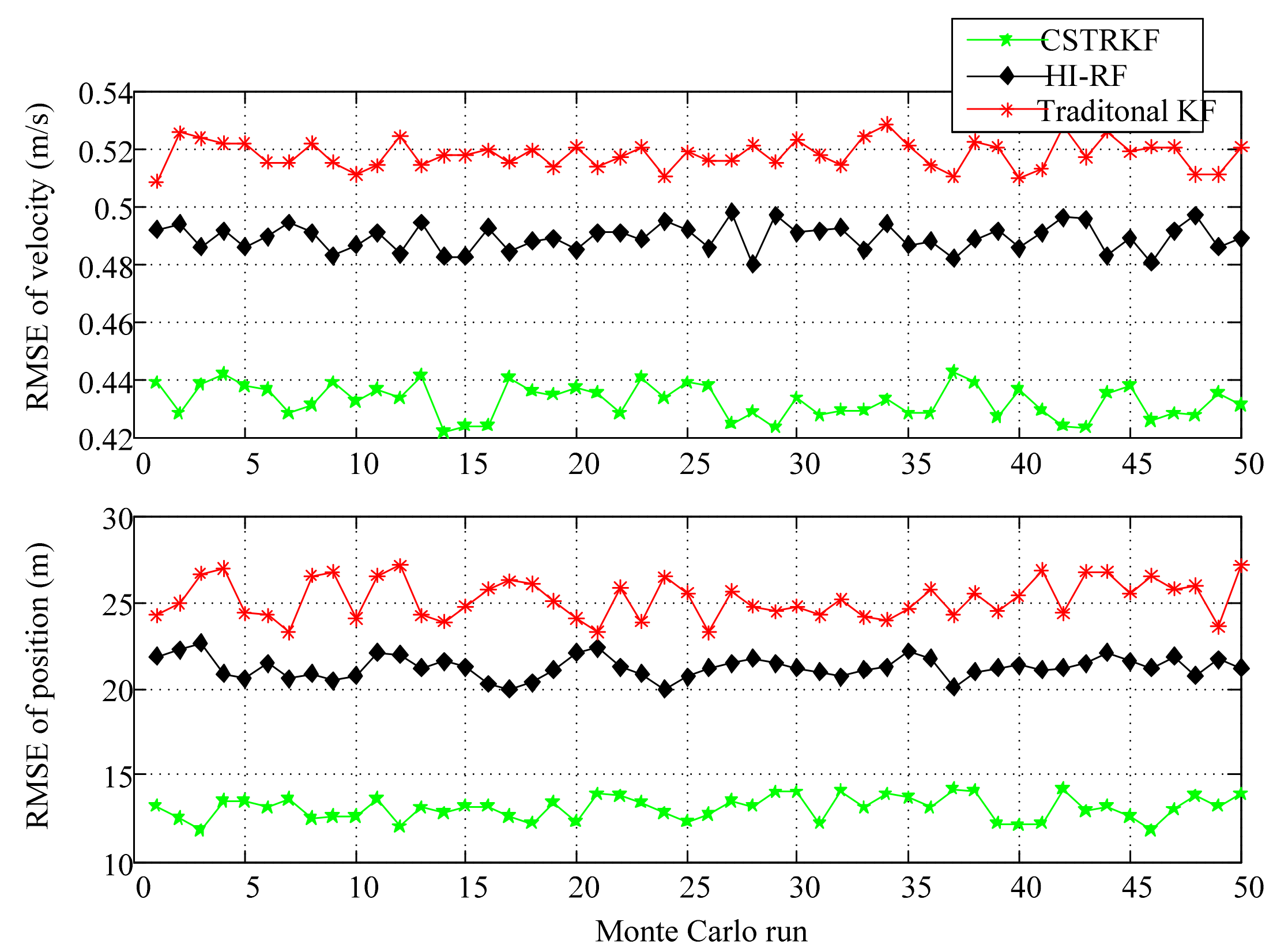
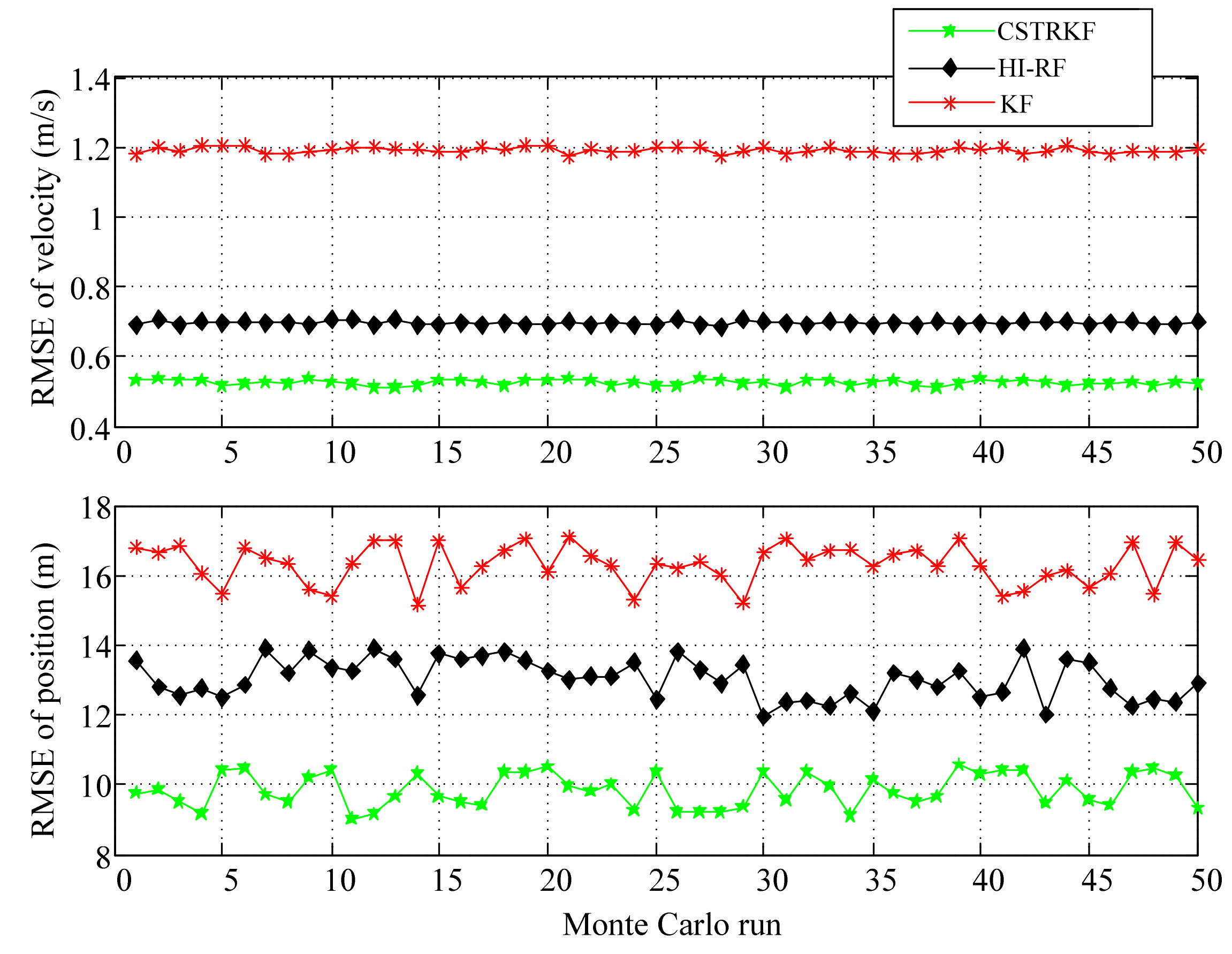
5.2. Evaluation of CSTRKF under a Contaminated Gaussian Measurement Noise Condition
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xiong, Z.; Peng, H.; Wang, J.; Wang, R.; Liu, J.-Y. Dynamic calibration method for SINS lever-arm effect for HCVs. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2760–2771. [Google Scholar] [CrossRef]
- Hu, G.; Ni, L.; Gao, B.; Zhu, X.; Wang, W.; Zhong, Y. Model Predictive Based Unscented Kalman Filter for Hypersonic Vehicle Navigation With INS/GNSS Integration. IEEE Access 2019, 8, 4814–4823. [Google Scholar] [CrossRef]
- Rhee, I.; Abdel-Hafez, M.; Speyer, J. Errata: Observability of an integrated GPS/INS during maneuvers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1421. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, M.; Tang, K.; Tie, J.; Li, X. Covert Spoofing Algorithm of UAV Based on GPS/INS-Integrated Navigation. IEEE Trans. Veh. Technol. 2019, 68, 6557–6564. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, Y.; Li, W. Robust adaptive filtering method for SINS/SAR integrated navigation system. Aerosp. Sci. Technol. 2011, 15, 425–430. [Google Scholar] [CrossRef]
- Fusini, L.; Fossen, T.I.; Johansen, T.A. Nonlinear Observers for GNSS- and Camera-Aided Inertial Navigation of a Fixed-Wing UAV. IEEE Trans. Control Syst. Technol. 2018, 26, 1884–1891. [Google Scholar] [CrossRef]
- Hu, G.; Wang, W.; Zhong, Y.; Gao, B.; Gu, C. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Hu, G.; Gao, S.; Zhong, Y. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar]
- Yang, T.-Y.; Sun, D. Global Navigation Satellite Systems Fault Detection and Exclusion: A Parameterized Quadratic Programming Approach. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2862–2871. [Google Scholar] [CrossRef]
- He, Z.; Wang, X.; Fang, J. An innovative high-precision SINS/CNS deep integrated navigation scheme for the Mars rover. Aerosp. Sci. Technol. 2014, 39, 559–566. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, C.; Lu, J.; Zhang, H. In-Flight Calibration of Gyros and Star Sensor with Observability Analysis for SINS/CNS Integration. IEEE Sens. J. 2017, 17, 7131–7142. [Google Scholar] [CrossRef]
- Yu, Y.-J.; Xu, J.-F.; Xiong, Z. SINS/CNS Nonlinear Integrated Navigation Algorithm for Hypersonic Vehicle. Math. Probl. Eng. 2015, 2015, 903054. [Google Scholar] [CrossRef]
- Fu, K.; Zhao, G.; Li, X.; Tang, Z.-L.; He, W. Iterative spherical simplex unscented particle filter for CNS/Redshift integrated navigation system. Sci. China Inf. Sci. 2017, 60, 222. [Google Scholar] [CrossRef]
- Wei, W.; Gao, Z.; Gao, S.; Jia, K. A SINS/SRS/GNS Autonomous Integrated Navigation System Based on Spectral Redshift Velocity Measurements. Sensors 2018, 18, 1145. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Xiong, H.; Bian, R.; Li, Y.; Du, Z.; Mai, Z. Fault-Tolerant GNSS/SINS/DVL/CNS Integrated Navigation and Positioning Mechanism Based on Adaptive Information Sharing Factors. IEEE Syst. J. 2020, 14, 3744–3754. [Google Scholar] [CrossRef]
- Hu, G.; Gao, B.; Zhong, Y.; Ni, L.; Gu, C. Robust Unscented Kalman Filtering With Measurement Error Detection for Tightly Coupled INS/GNSS Integration in Hypersonic Vehicle Navigation. IEEE Access 2019, 7, 151409–151421. [Google Scholar] [CrossRef]
- Cho, S.Y.; Choi, W.S. Robust Positioning Technique in Low-Cost DR/GPS for Land Navigation. IEEE Trans. Instrum. Meas. 2006, 55, 1132–1142. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, X.-X.; Sun, M.; Ding, J.; Yan, C. Adaptive UKF Filtering Algorithm Based on Maximum a Posterior Estimation and Exponential Weighting. Acta Autom. Sin. 2010, 36, 1007–1019. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, B.; Wang, H.; Li, Z.; Zhang, Z. State estimation based on improved cubature Kalman filter algorithm. IET Sci. Meas. Technol. 2020, 14, 536–542. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2019, 20, 250–260. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.-B.; Zhang, Q.-Z. A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation. Sensors 2016, 16, 2127. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Mili, L. A Decentralized H-Infinity Unscented Kalman Filter for Dynamic State Estimation Against Uncertainties. IEEE Trans. Smart Grid 2018, 10, 4870–4880. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, W.; Yin, C.; Feng, Y. Huber-based Unscented Kalman Filters with the q-gradient. IET Sci. Meas. Technol. 2017, 11, 380–387. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 105011. [Google Scholar] [CrossRef]
- Soken, H.E.; Hacizade, C.; Sakai, S.-I. Robust Kalman filtering for small satellite attitude estimation in the presence of measurement faults. Eur. J. Control 2014, 20, 64–72. [Google Scholar] [CrossRef]
- Klausner, N.; Azimi-Sadjadi, M.R.; Scharf, L.L. Saddlepoint Approximations for Correlation Testing Among Multiple Gaussian Random Vectors. IEEE Signal Process. Lett. 2016, 23, 703–707. [Google Scholar] [CrossRef]
- Raghunath, S.; Ratnam, D.V. Ionospheric Spatial Gradient Detector Based on GLRT Using GNSS Observations. IEEE Geosci. Remote Sens. Lett. 2016, 13, 875–879. [Google Scholar] [CrossRef]
- Conte, E.; De Maio, A.; Ricci, G. GLRT-based adaptive detection algorithms for range-spread targets. IEEE Trans. Signal Process. 2001, 49, 1336–1348. [Google Scholar] [CrossRef]
- Brumback, B.; Srinath, M. A Chi-square test for fault-detection in Kalman filters. IEEE Trans. Autom. Control 1987, 32, 552–554. [Google Scholar] [CrossRef]
- Wang, R.; Xiong, Z.; Liu, J.; Xu, J.; Shi, L. Chi-square and SPRT combined fault detection for multisensor navigation. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1352–1365. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial position | East longitude | 108.9° |
| North latitude | 34.025° | |
| Altitude | 60 km | |
| Initial velocity | East | 251 m/s |
| North | 251 m/s | |
| Up | 225 m/s | |
| Initial position error | East longitude | 50 m |
| North latitude | 50 m | |
| Altitude | 25 m | |
| Initial velocity error | East | 1 m/s |
| North | 1 m/s | |
| Up | 1 m/s | |
| Gyro parameters | Constant drift | 0.5°/h |
| White noise | 0.5°/h | |
| Sampling frequency | 10 Hz | |
| Accelerometer parameters | Zero bias | 0.1 mg |
| White noise | 0.1 mg | |
| Sampling frequency | 10 Hz | |
| SRS | Redshift measurement error | 10−8 |
| Sampling frequency | 1 Hz | |
| CNS | Position measurement error | 20 m |
| Sampling frequency | 1 Hz | |
| Barometric altimeter | Altitude measurement error | 10 m |
| Sampling frequency | 1 Hz |
| Estimation | Filters | MAE | |
|---|---|---|---|
| Times with Outlier | Times in Normal | ||
| Velocity | KF | 0.5543 (m/s) | 0.4509 (m/s) |
| HI-KF | 0.4817 (m/s) | 0.4349 (m/s) | |
| CSTKF | 0.4327 (m/s) | 0.4236 (m/s) | |
| Position | KF | 25.0624 (m) | 8.6598 (m) |
| HI-KF | 19.6607 (m) | 8.3507 (m) | |
| CSTKF | 14.1423 (m) | 7.8930 (m) | |
| Estimation | Filters | MAE |
|---|---|---|
| Velocity | KF | 16.7923 (m) |
| HI-KF | 12.2325 (m) | |
| CSTKF | 9.1047 (m) | |
| Position | KF | 1.1780 (m/s) |
| HI-KF | 0.7367 (m/s) | |
| CSTKF | 0.5165 (m/s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, G.; Gao, S.; Hong, G.; Peng, X.; Yu, T. A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter. Sensors 2020, 20, 5909. https://doi.org/10.3390/s20205909
Gao G, Gao S, Hong G, Peng X, Yu T. A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter. Sensors. 2020; 20(20):5909. https://doi.org/10.3390/s20205909
Chicago/Turabian StyleGao, Guangle, Shesheng Gao, Genyuan Hong, Xu Peng, and Tian Yu. 2020. "A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter" Sensors 20, no. 20: 5909. https://doi.org/10.3390/s20205909
APA StyleGao, G., Gao, S., Hong, G., Peng, X., & Yu, T. (2020). A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter. Sensors, 20(20), 5909. https://doi.org/10.3390/s20205909