An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning

Abstract
1. Introduction
2. Related Research
3. Construction of Autonomous Path Planning Model for Unmanned Ships Based on DRL
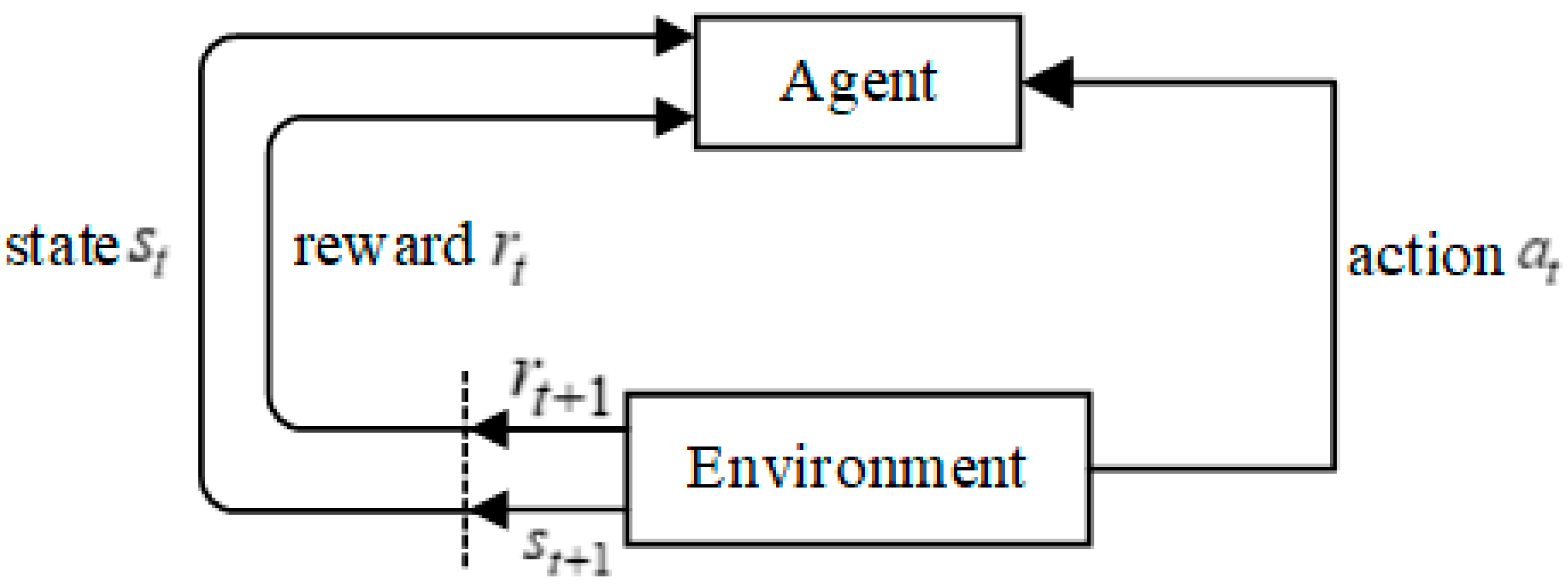
3.1. Deep Reinforcement Learning
3.2. The Principle of DDPG Algorithm
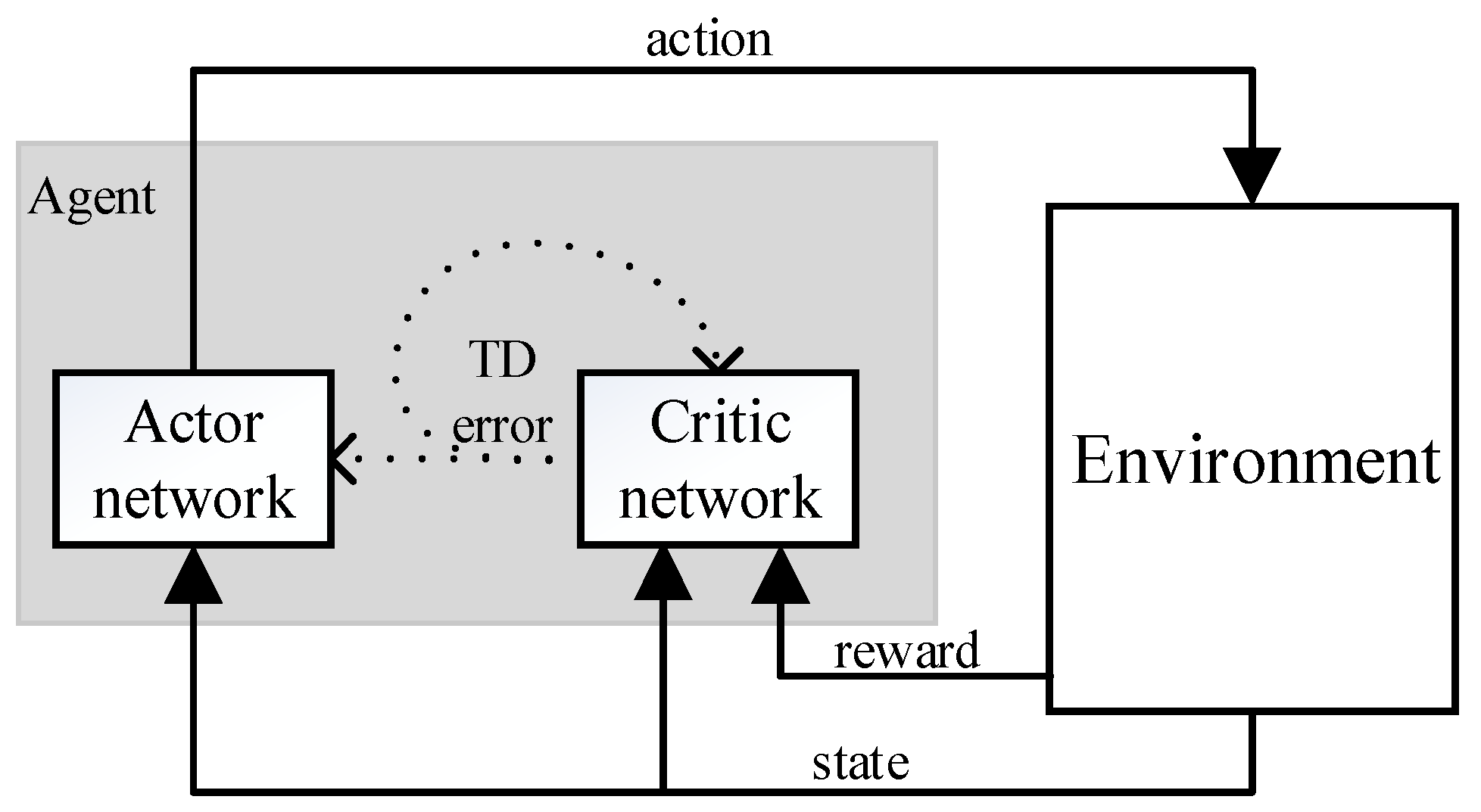
3.2.1. AC Algorithm
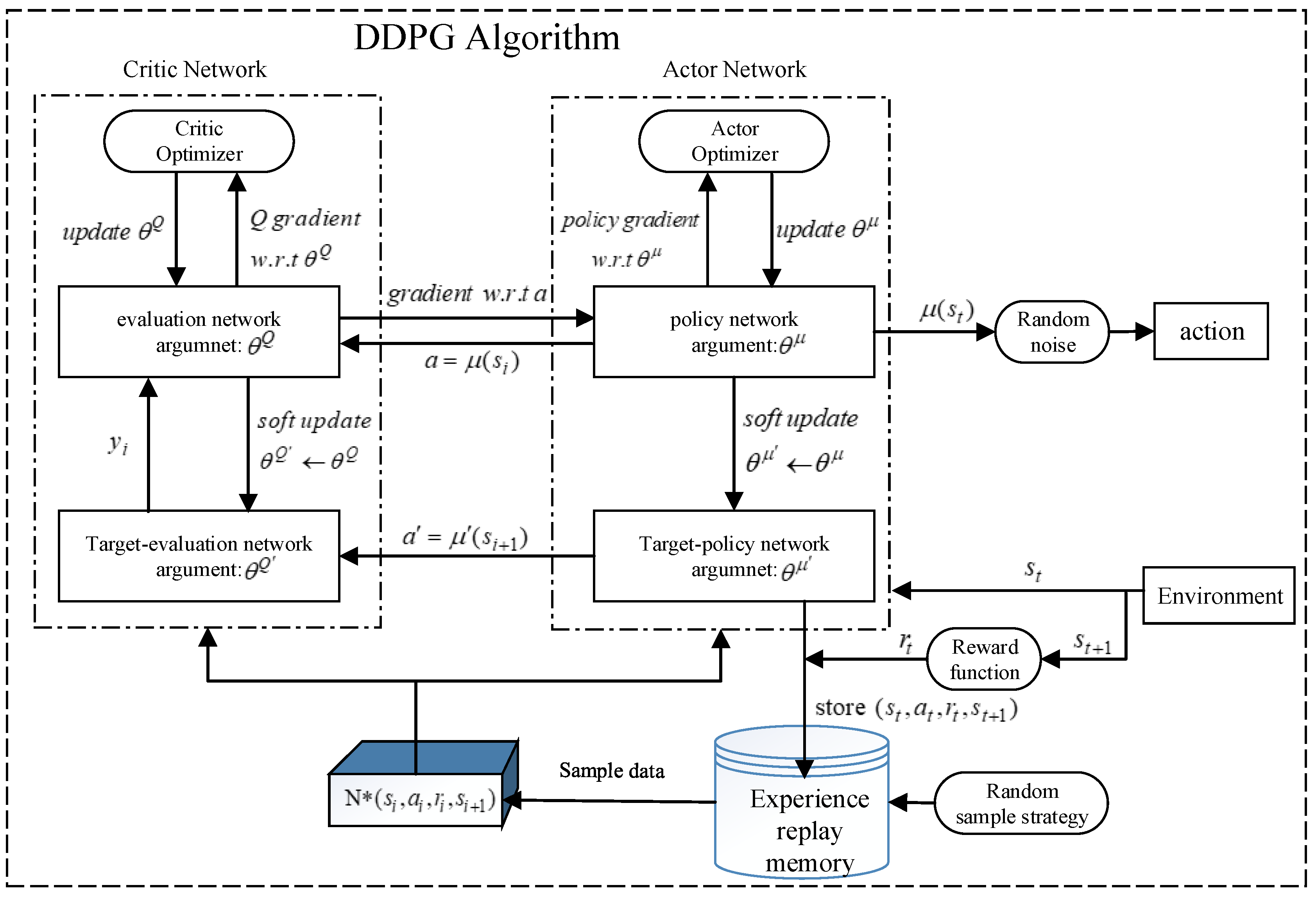
3.2.2. DDPG Algorithm Structure
3.3. Structure Design of Autonomous Path Planning Model for Unmanned Ships Based on DDPG Algorithm
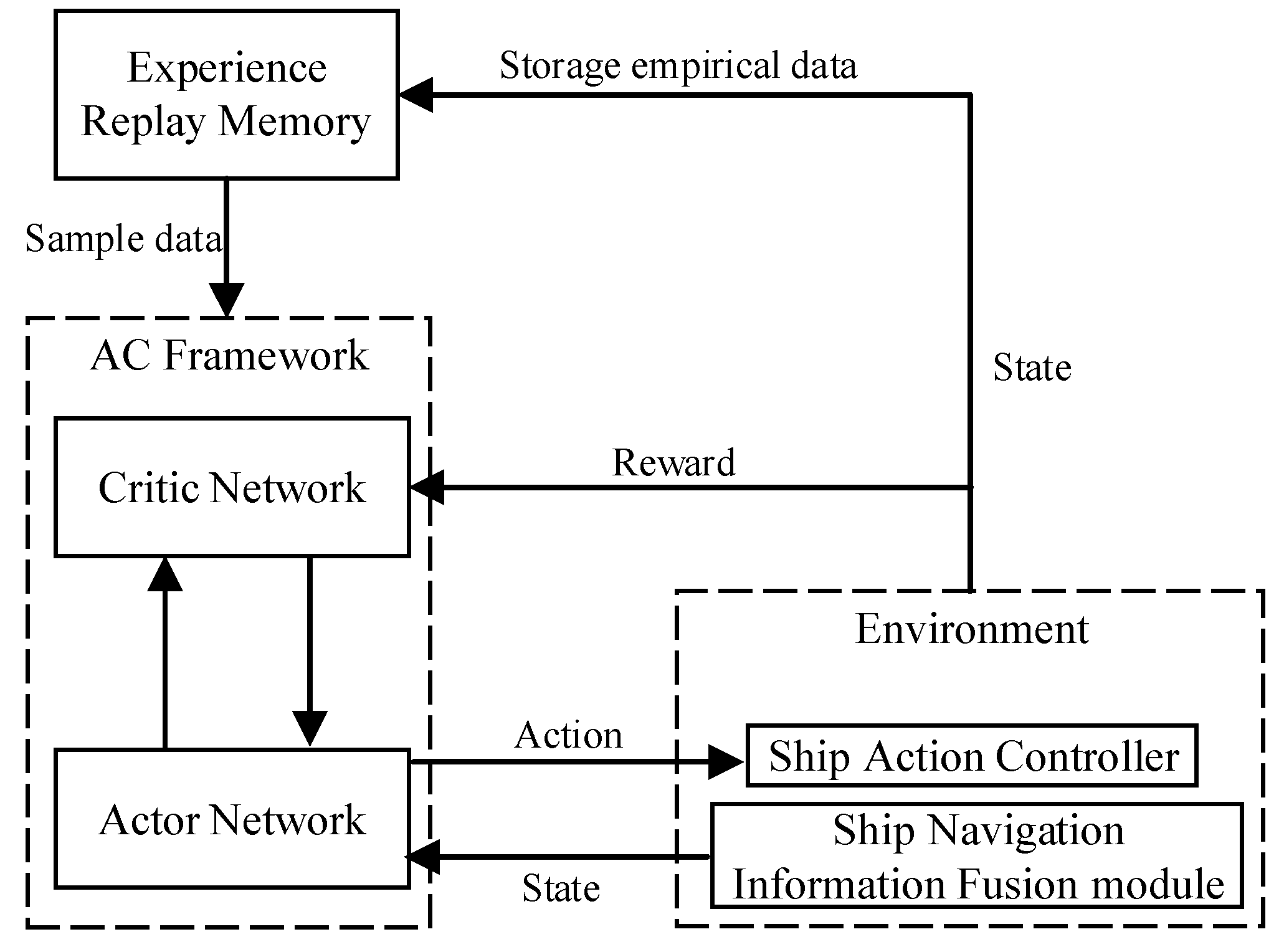
3.3.1. Model Structure
| Algorithm 1: Pseudo code of the DDPG algorithm. |
| 1: Randomly initialize Critic network and Actor network with weight parameters and . 2: Initialize target network Actor and Critic with weight parameters and . 3: Initialize experience replay memory . 4: for t = 1 to M do 5: Initialize the random process in the action exploration strategy. 6: Input initial unmanned ships and environment observation state : ship latitude and Longitude, ship heading, ship speed, angle with target point, distances from obstacles. 7: for t = 1 to T do 8: Choose ship heading and ship speed based on current strategy and exploring noise . 9: Implement output action to get the reward and the new state . 10: Save transition into . 11: Sample random batch of transitions from . 12: Set 13: Update online Critic network by minimizing loss: 14: Update online Actor network using sampled policy gradient: 15: Update target Actor network and target Critic network: 16: end for |
| 17: end for |
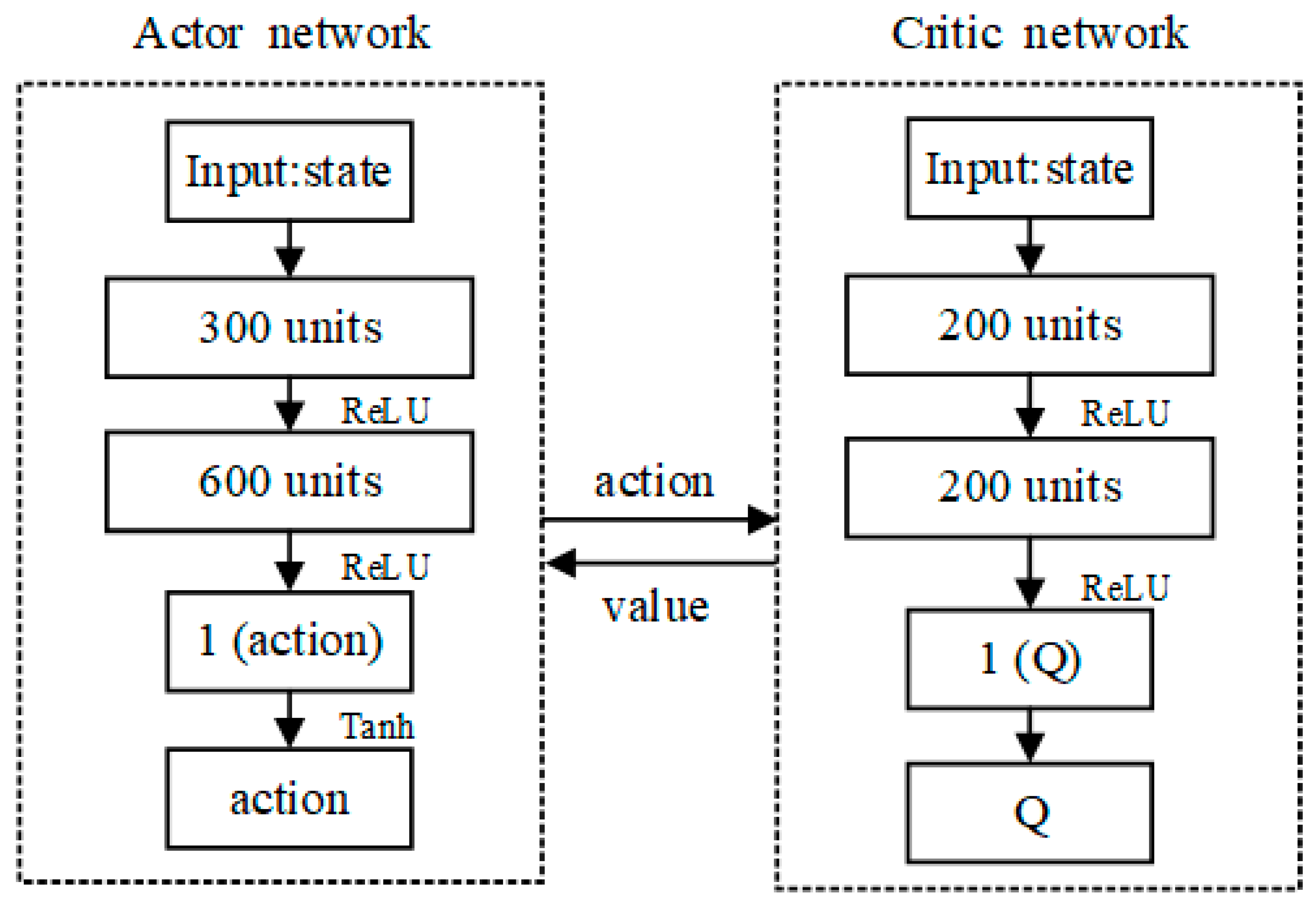
3.3.2. Structural Design of AC Algorithms
3.3.3. Action Strategy Design
3.3.4. Data Preparation
3.3.5. Design of Reward Function
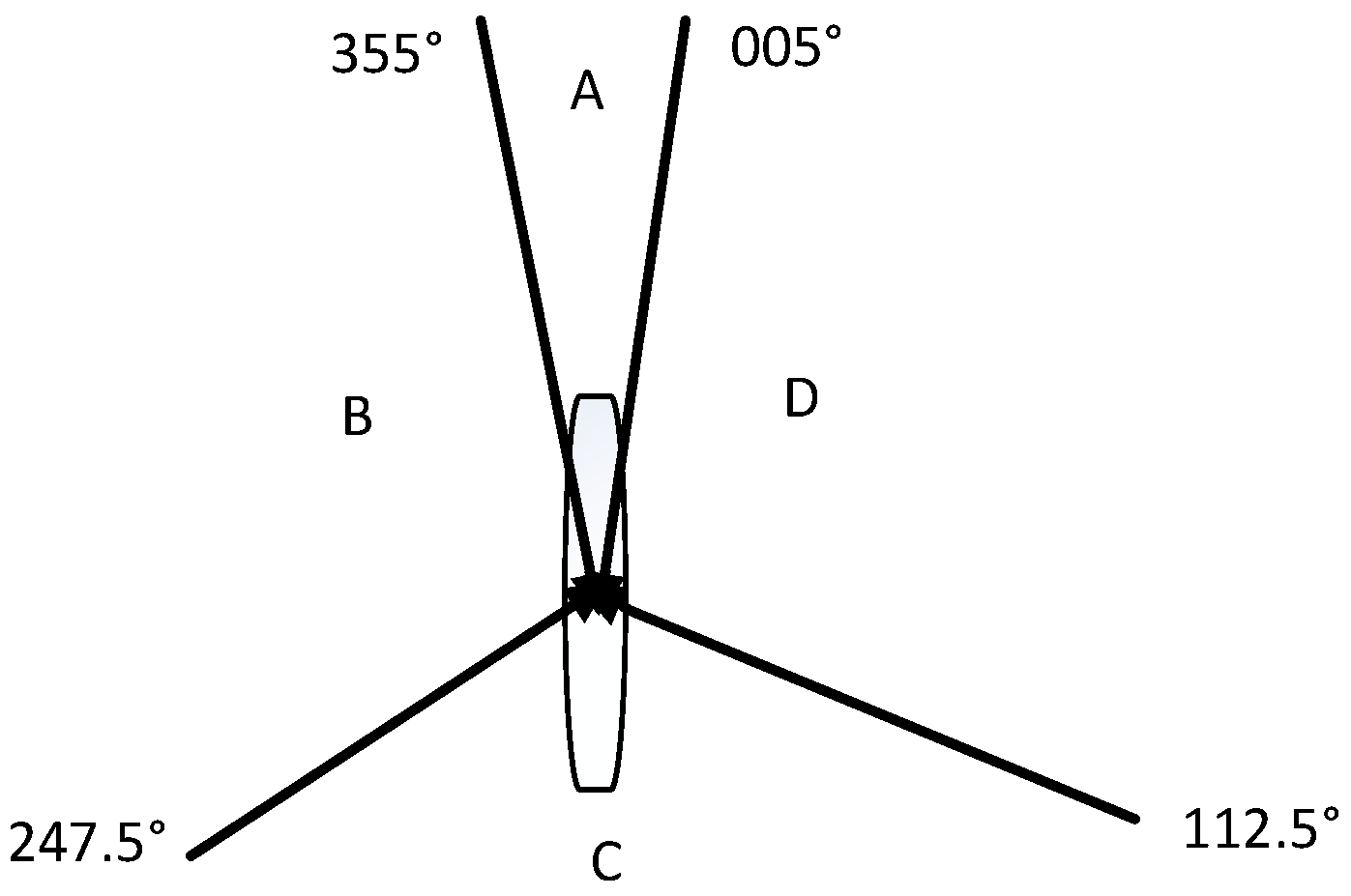
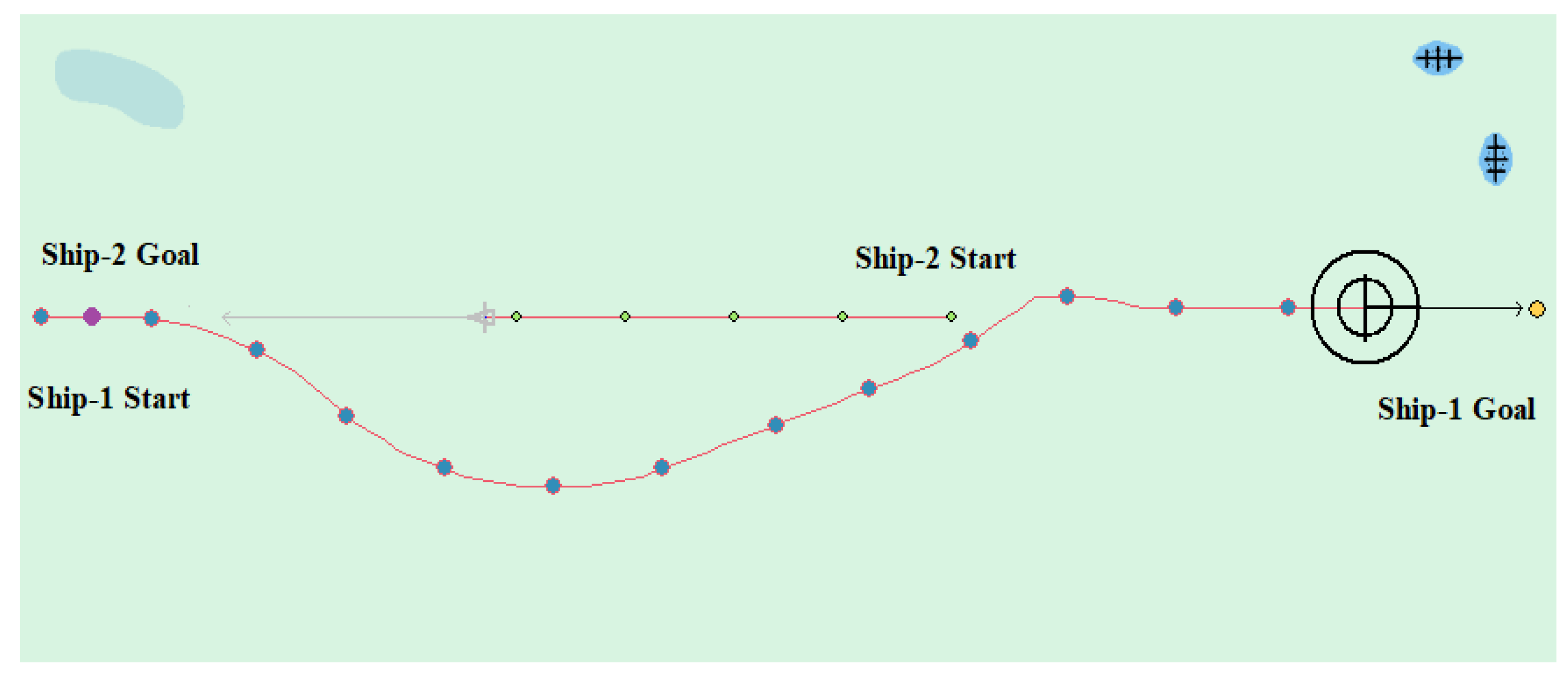
- Head-on situation. Under this circumstance, both ships should take the action of turning to the right to avoid the boat. The method of rule conversion is as follows: a navigational limit line with a length of three times the ship length and a direction of 10° from the bow is drawn clockwise in the bow direction of the two ships. The environment will punish the ship if the ship crosses the navigation limit line. The specific performance is that the ship receives a negative reward.
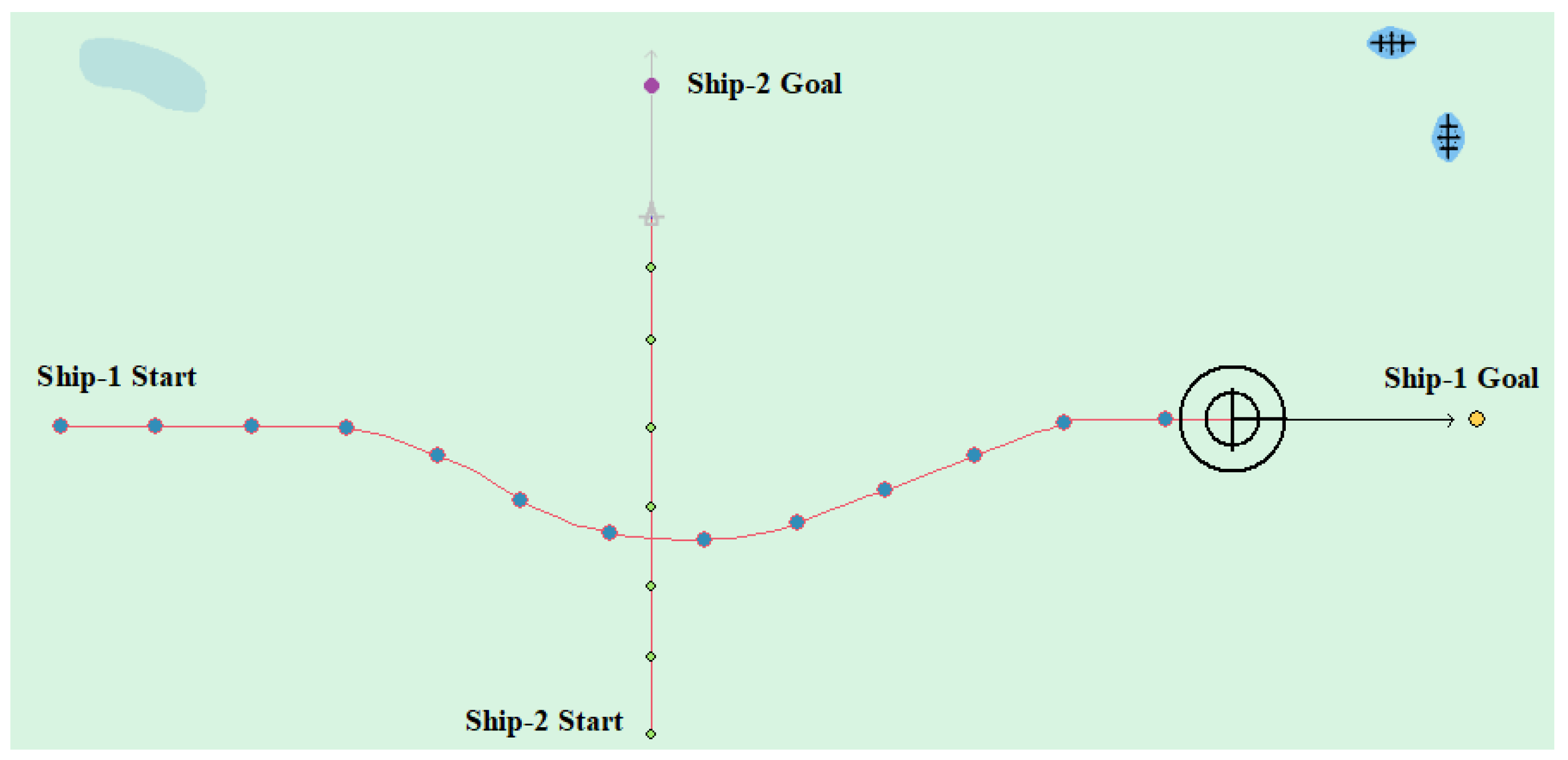
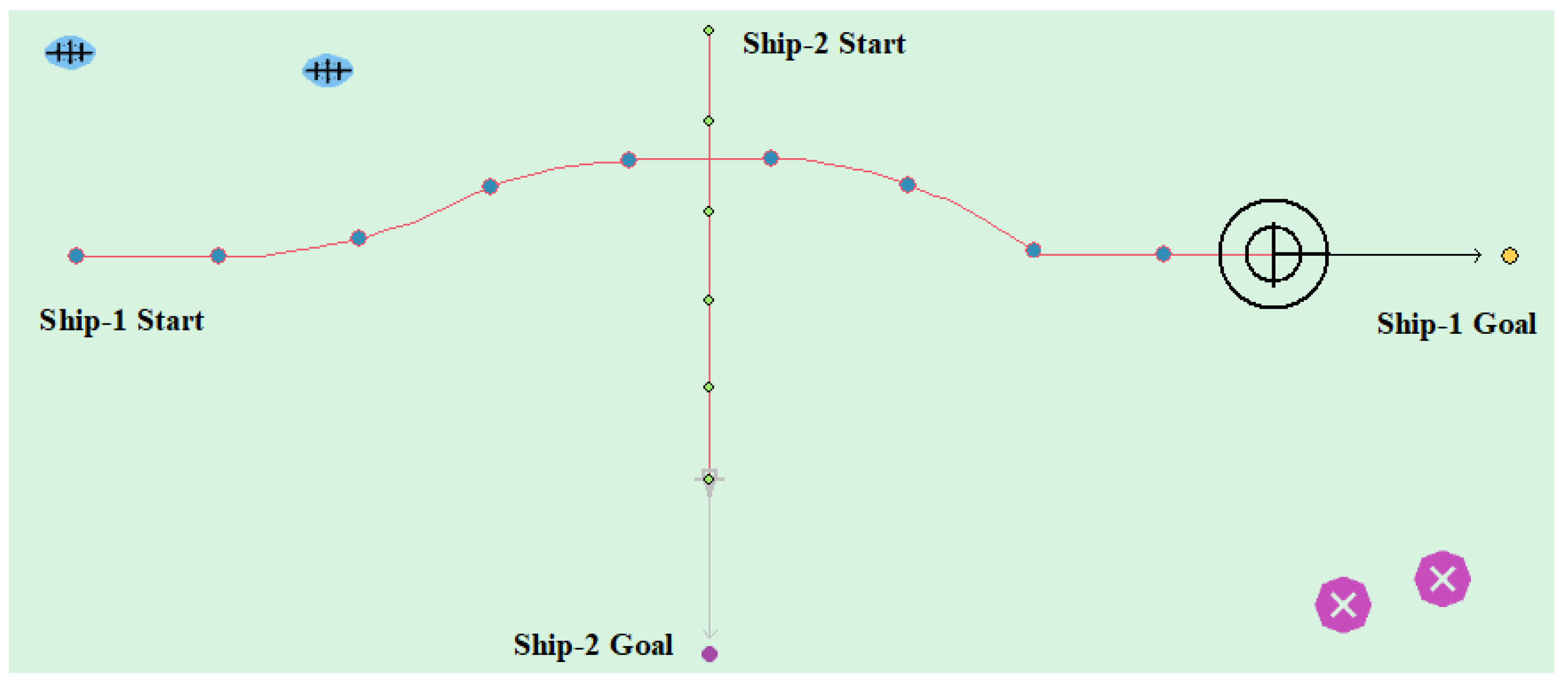
- Crossing situation. If there is a ship on the right side of the other ship, the ship should pass through the tail of the other ship. The method of rule conversion is as follows: draw a navigation limit line that is equal to four times the length of the ship in the direction of the bow of the other ship, to avoid the self-ship passing through the bow of the other ship. The ship will be punished and receive a negative reward if the ship crosses the navigation limit of the other ship.
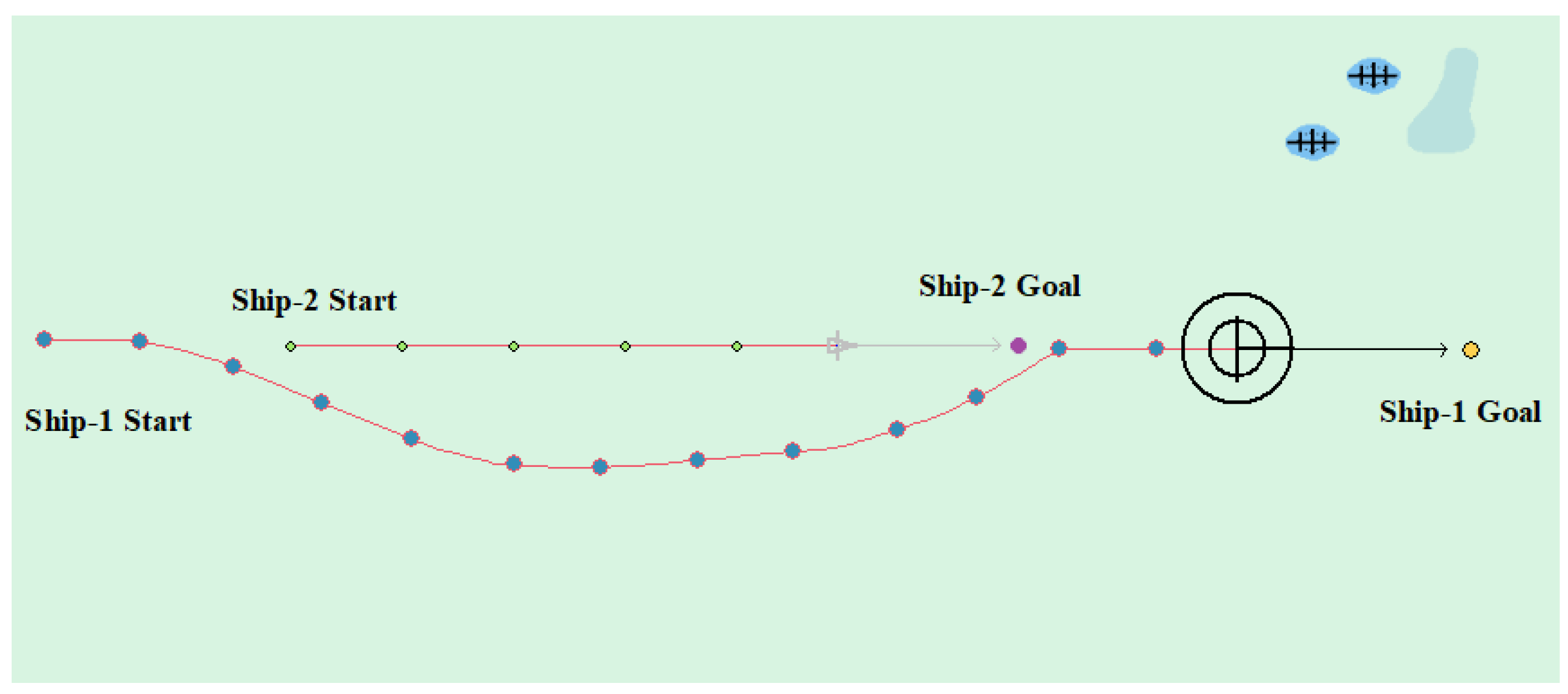
- Overtaking situation. The ship should pass from both sides of the other ship when the ship is behind the other ship and needs to overtake the other ship. The method of rule conversion is as follows: a navigation limit line of 1.5 times the length of the ship is drawn at the tail of the other ship in the vertical direction of the course. If the ship crosses the navigation limit line, it will be punished and get a negative return value.
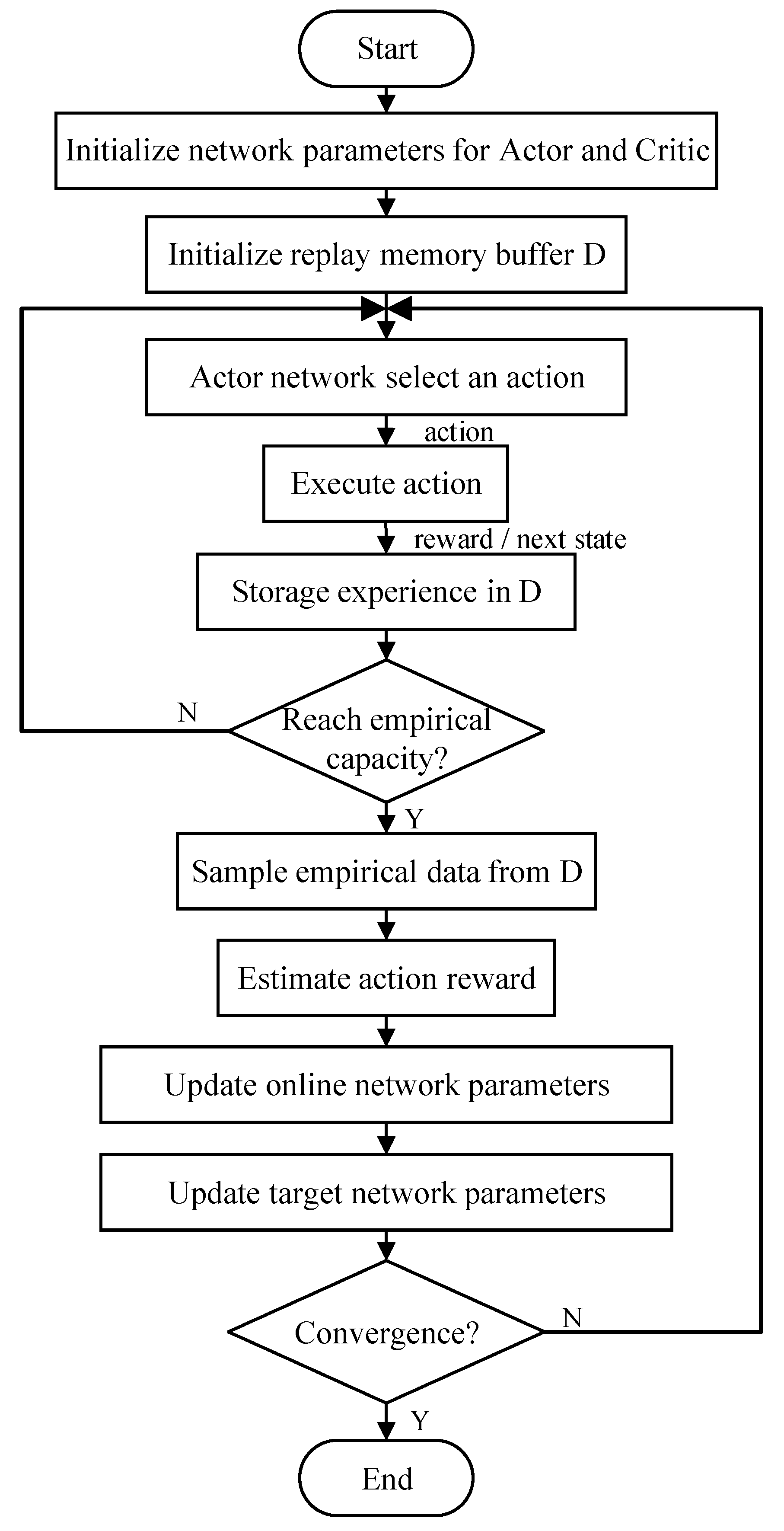
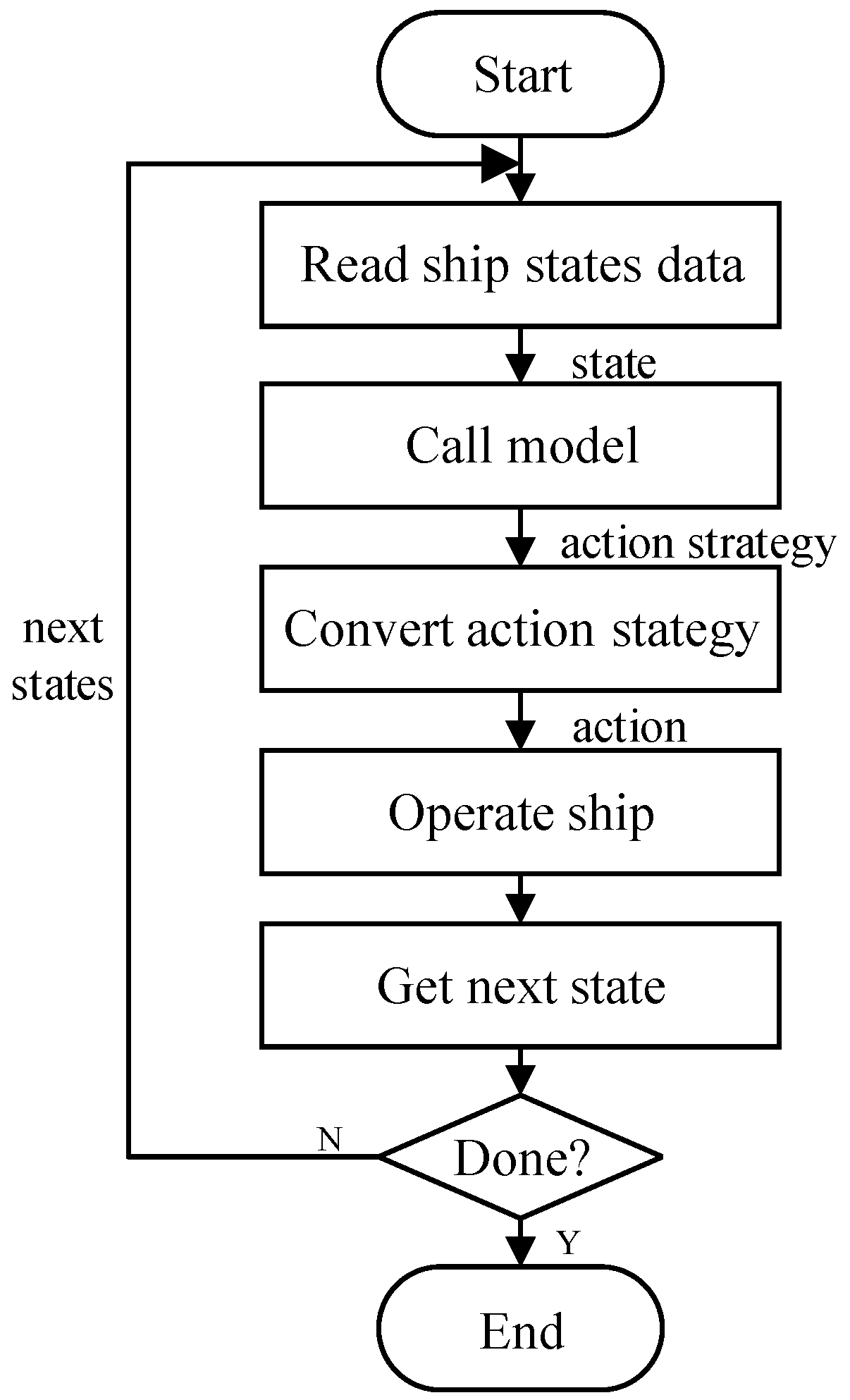
3.4. Model Execution Process
- When the unmanned ships path planning program starts, the system reads the ship data through the ship navigation information fusion module.
- The system invokes the model and takes the ship data as the input state and obtains the ship’s action strategy under the current state after the model processing and calculation.
- According to the actual motion of the ship, the model further converts the action strategy into the actual action that the unmanned ships should take.
- The ship action controller analyzes the acquired execution action and performs the action in the current unmanned ships state.
- The model obtains the states information of the unmanned ships at the next moment after the execution action, and determines whether the ship state after the execution action is the end state.
- The model will continue to use the state information of the ship at the next moment if it is not the end state, and then calculate and judge what action the ship should take at the next moment and cycle through it. If it is the end state, it indicates that the unmanned ships have completed the path planning task, and the model ends the calculation and the invocation.
4. Simulation Results and Experimental Comparison
4.1. Definition of Model Input and Output Parameters
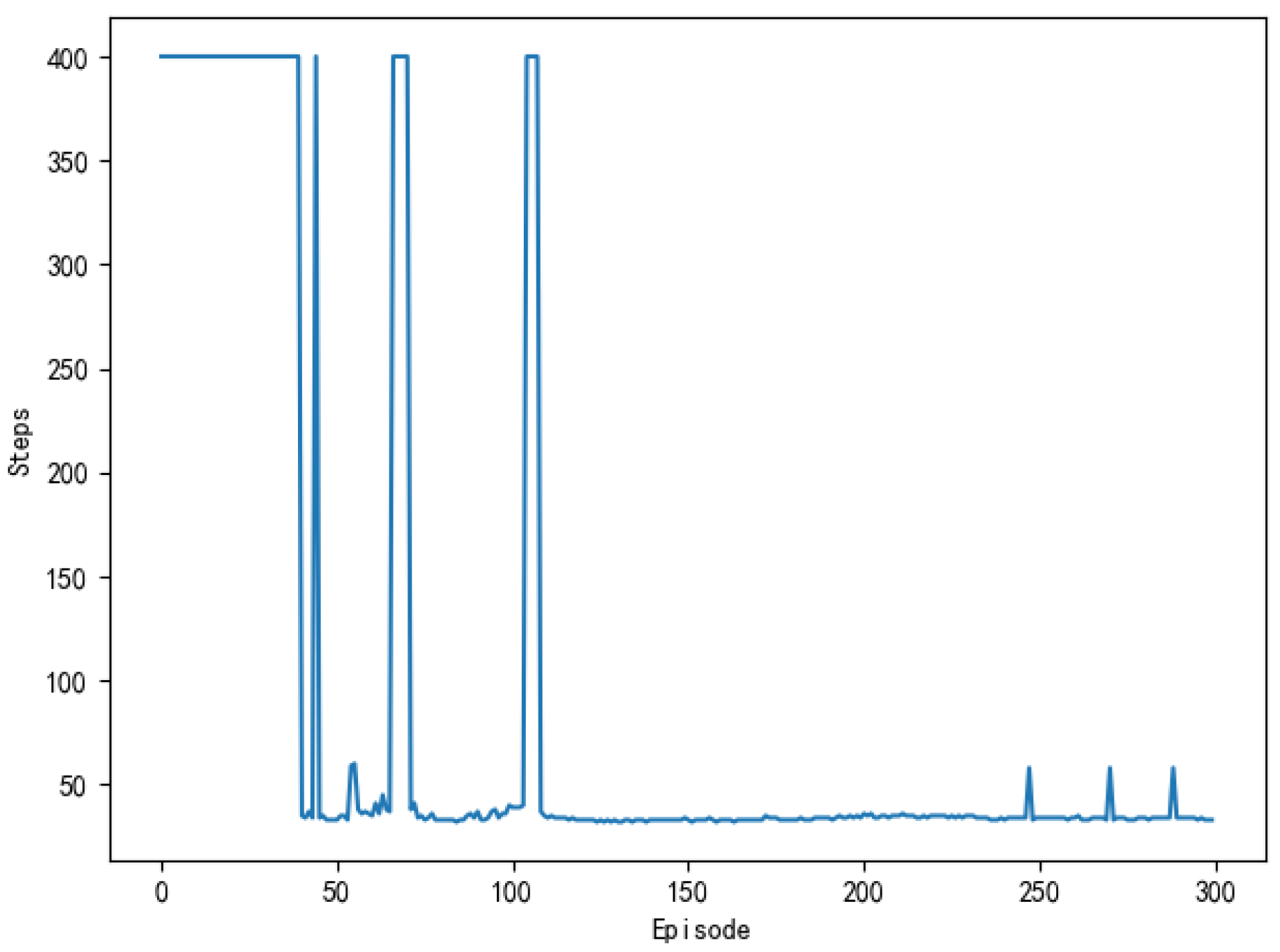
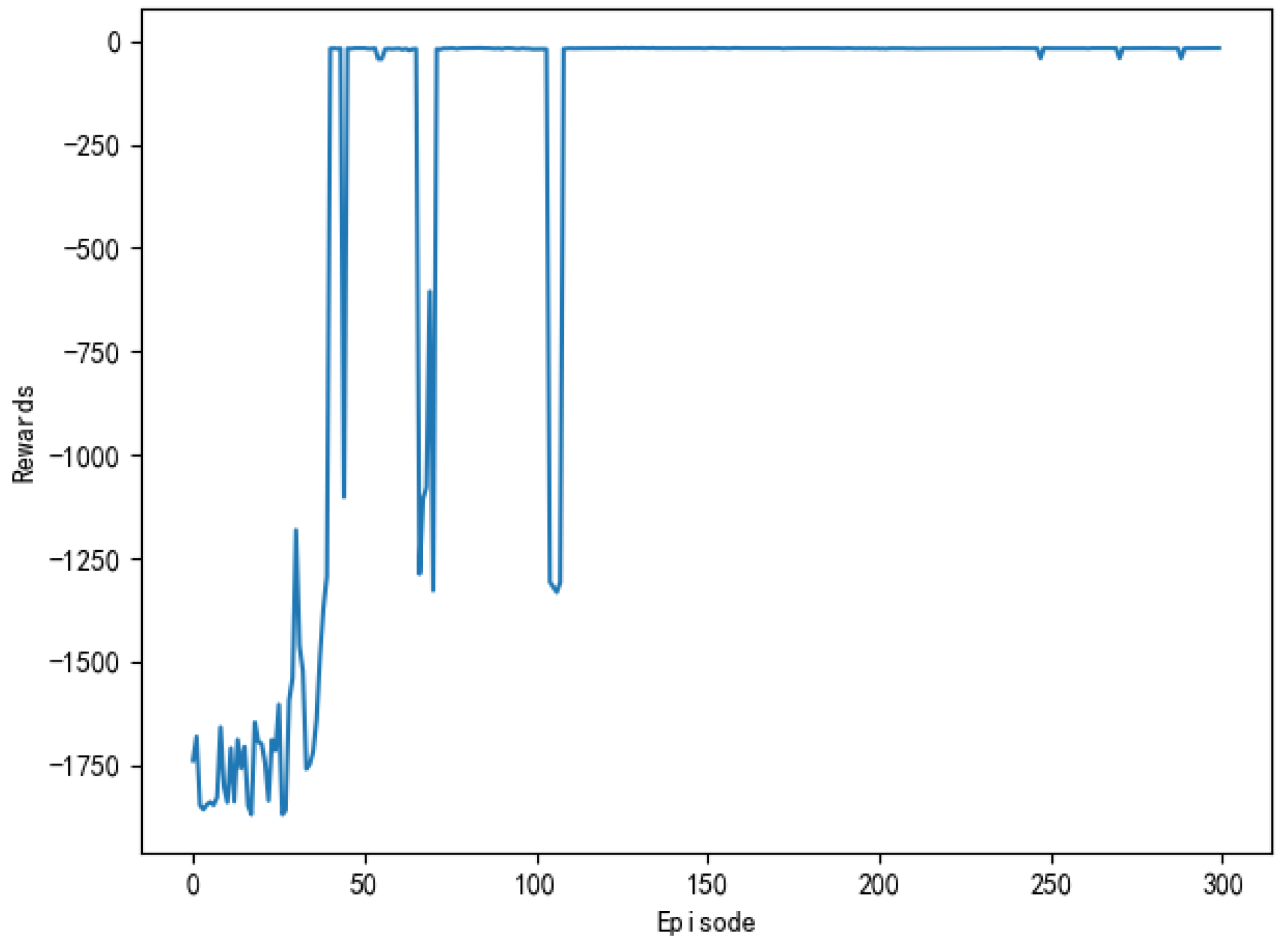
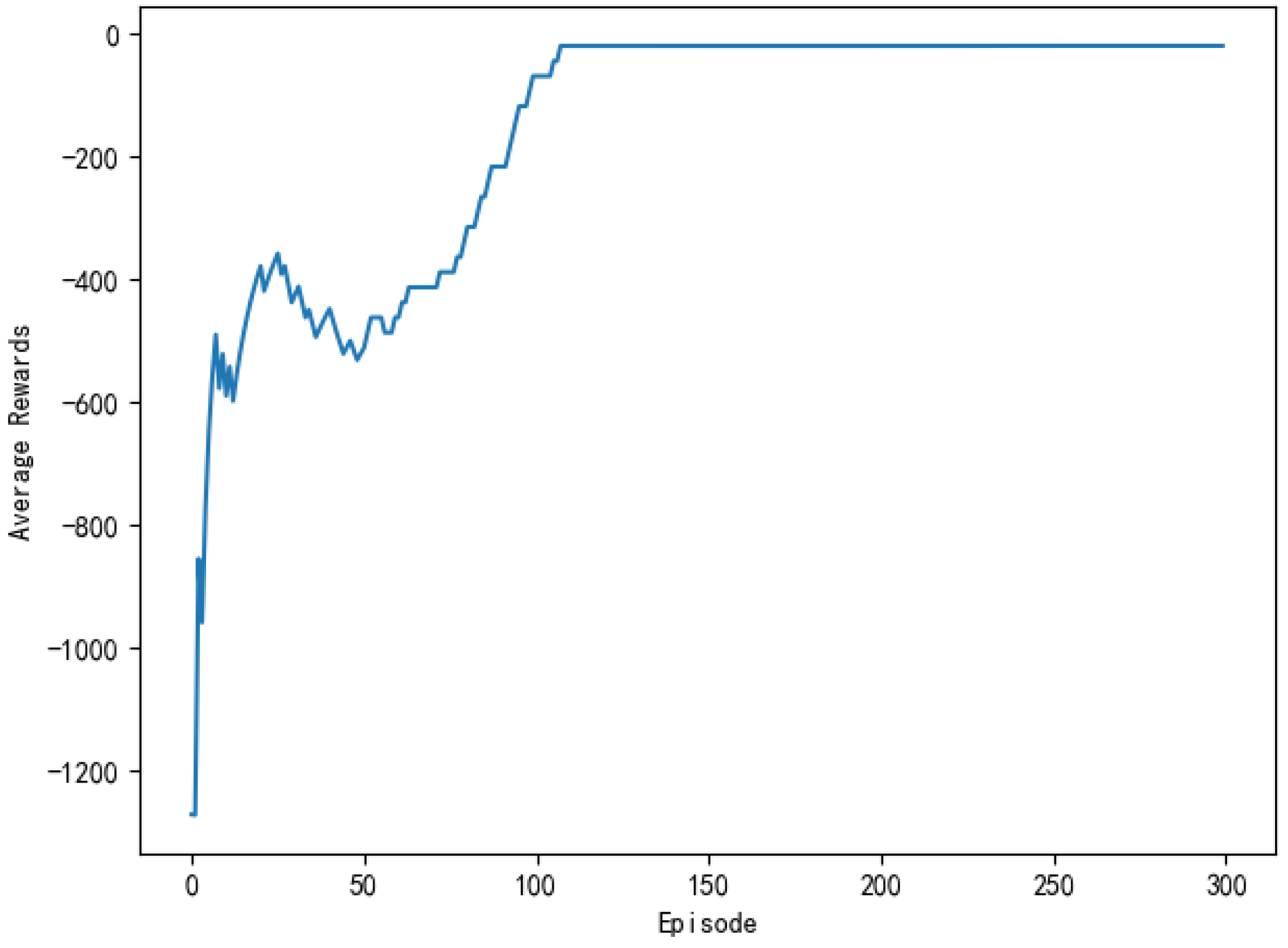
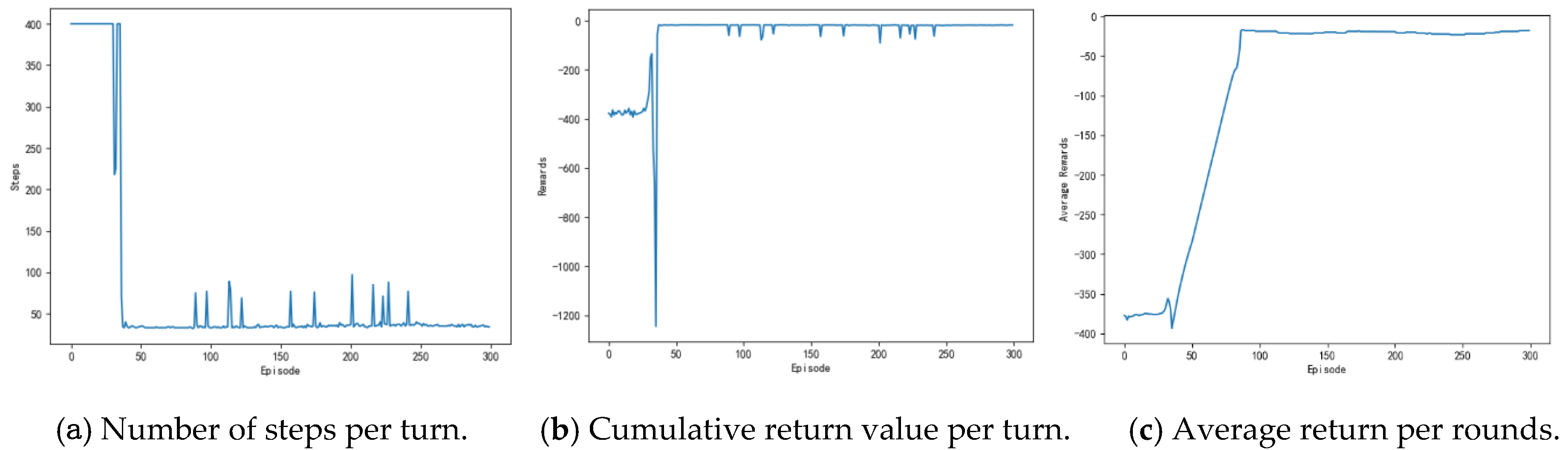
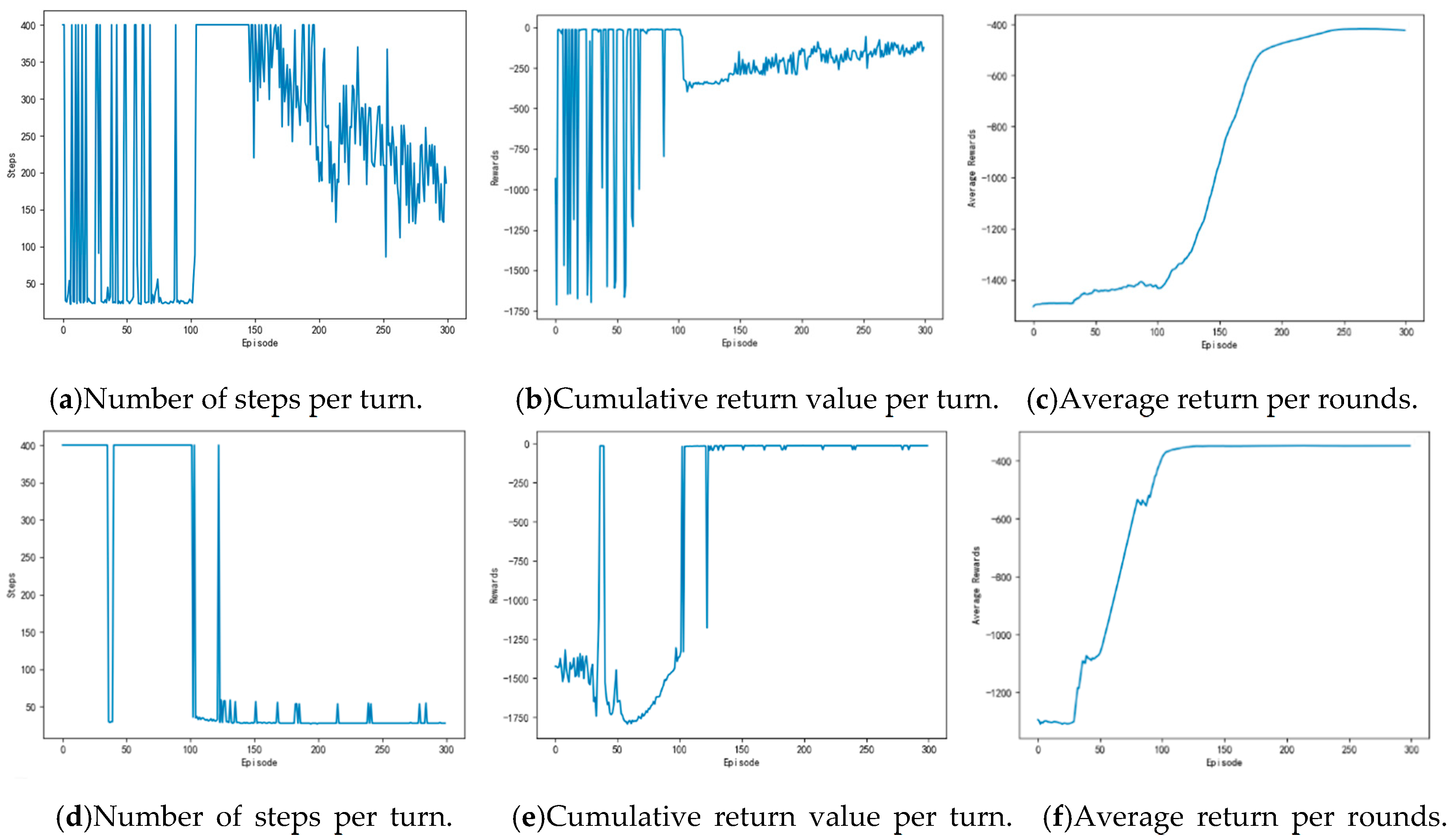
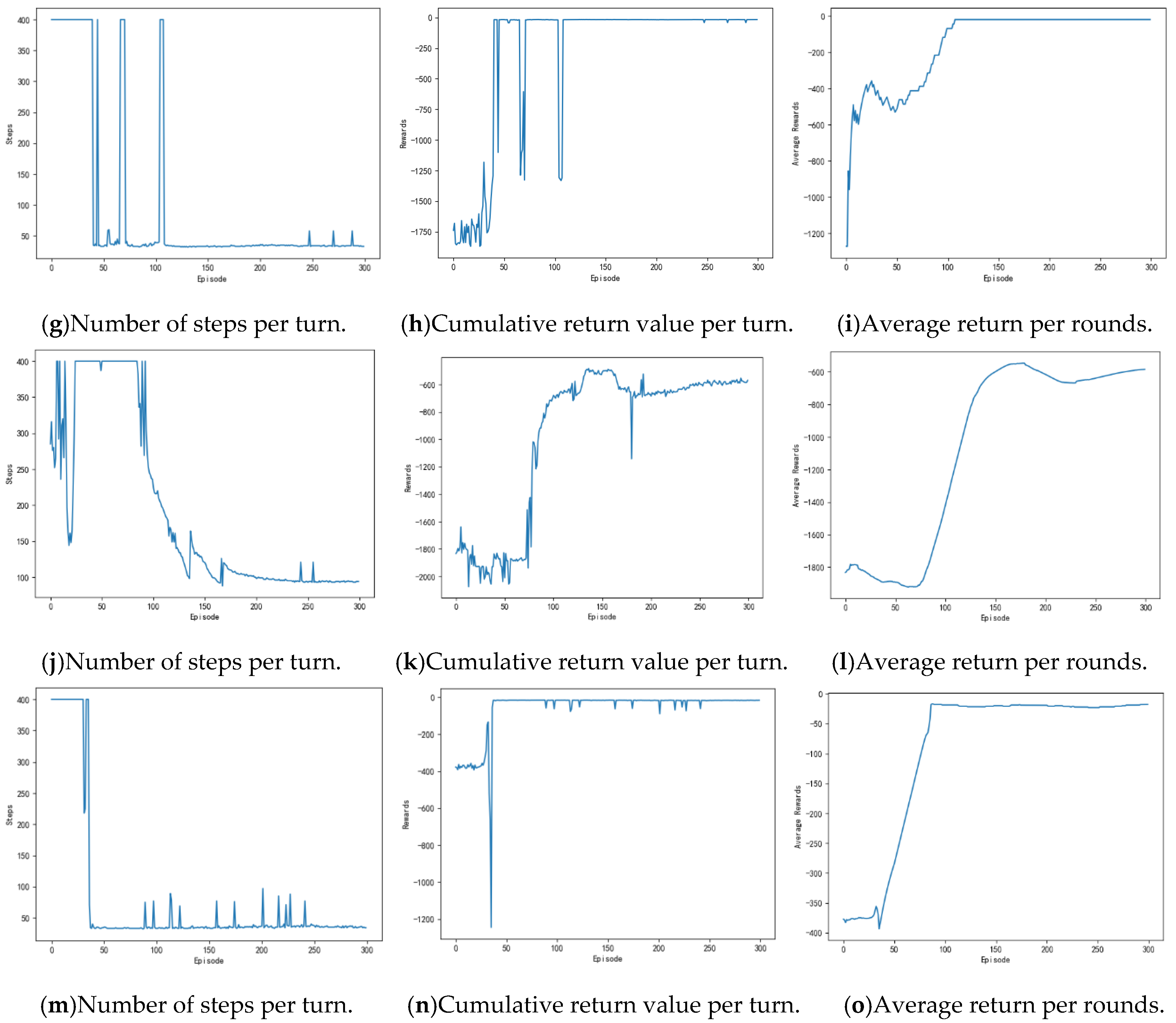
4.2. Model Training Process
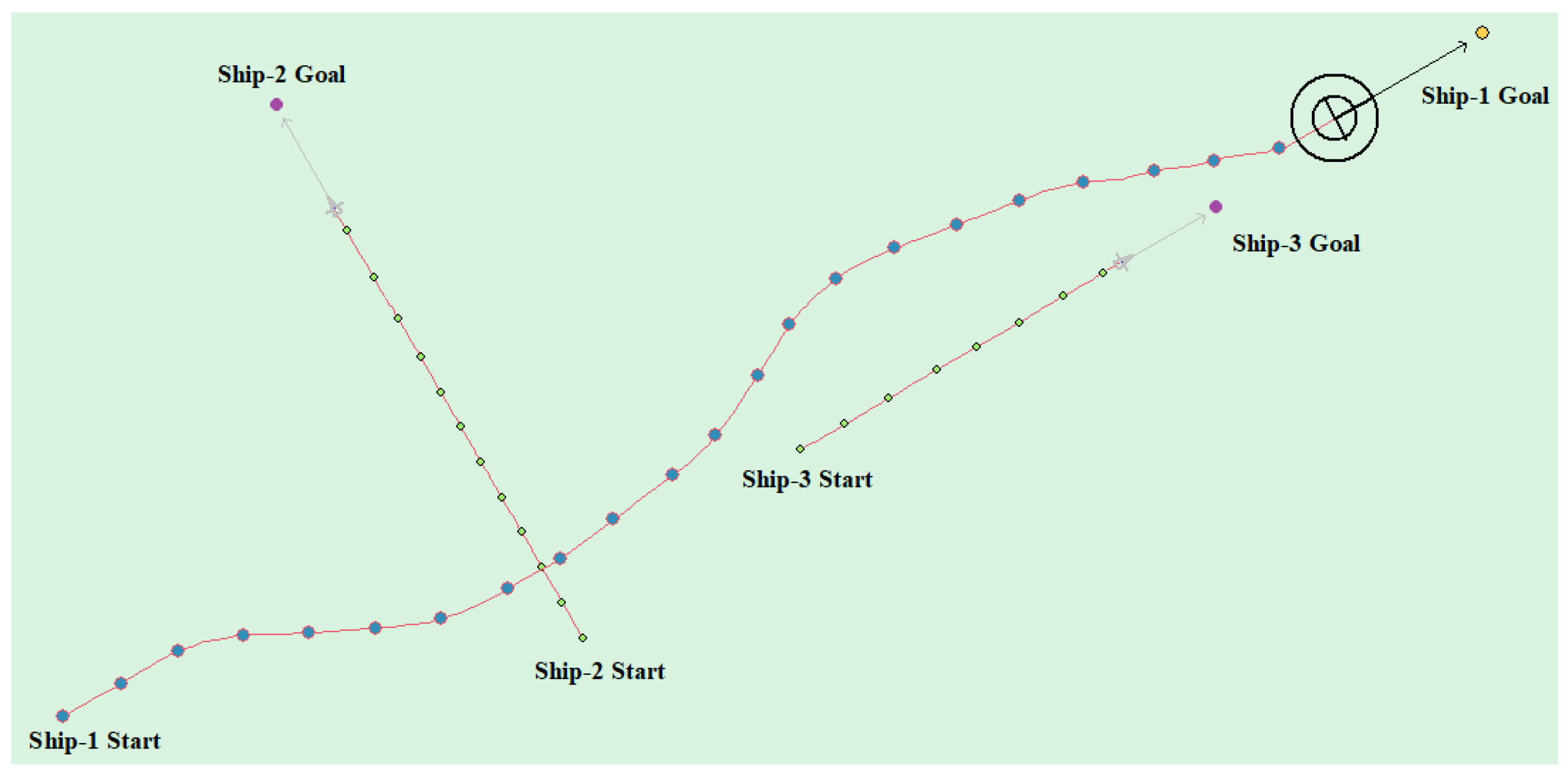
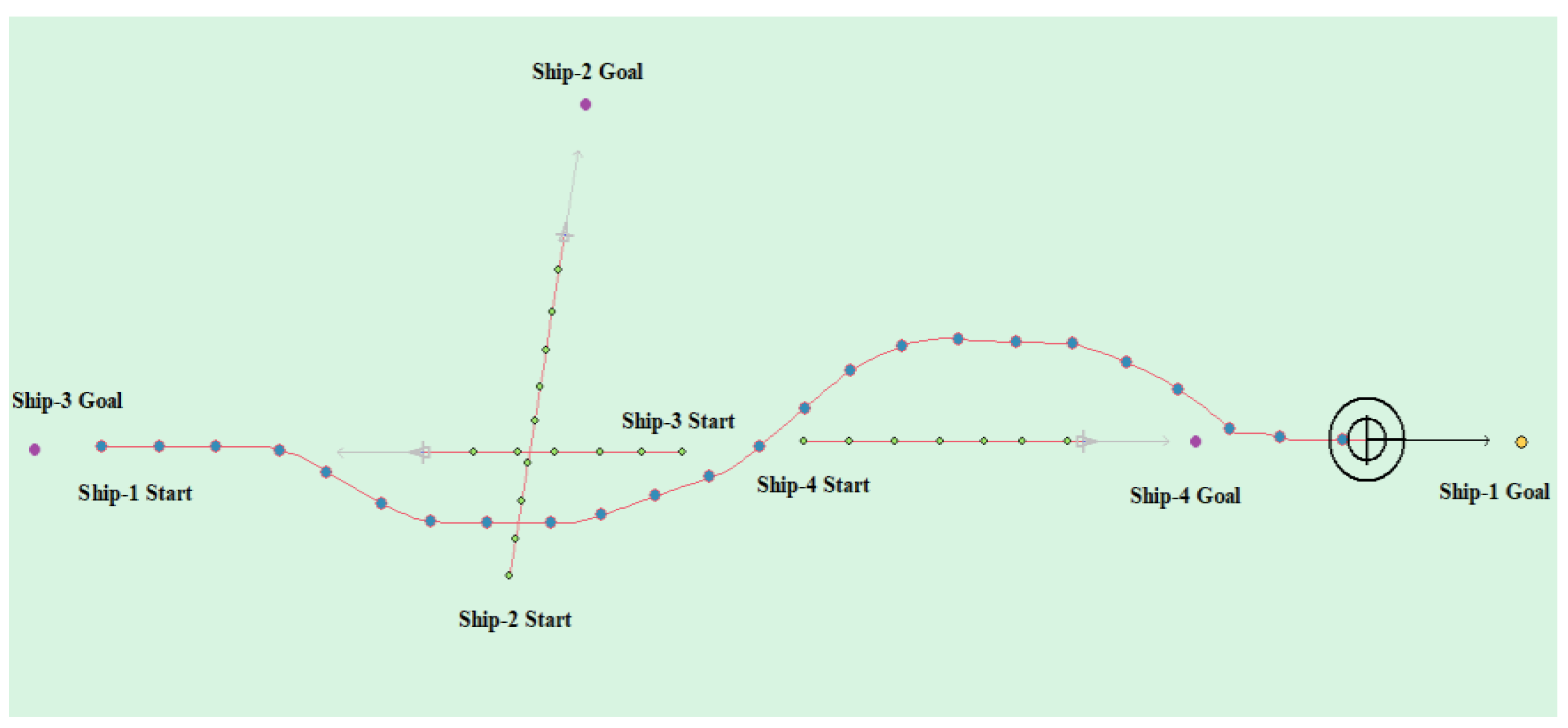
4.3. Model Integration and Simulation Experiment
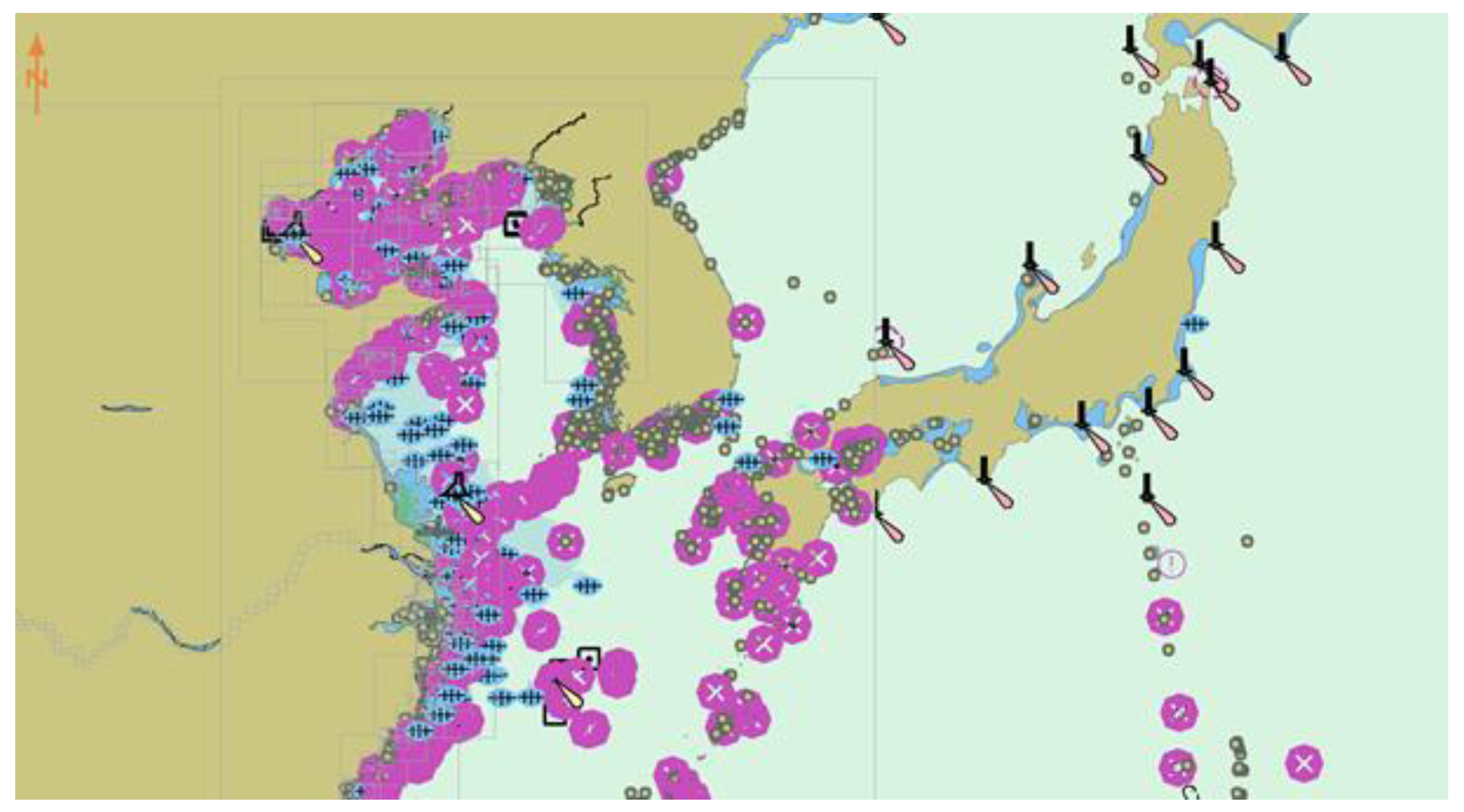
4.3.1. Verification Environment
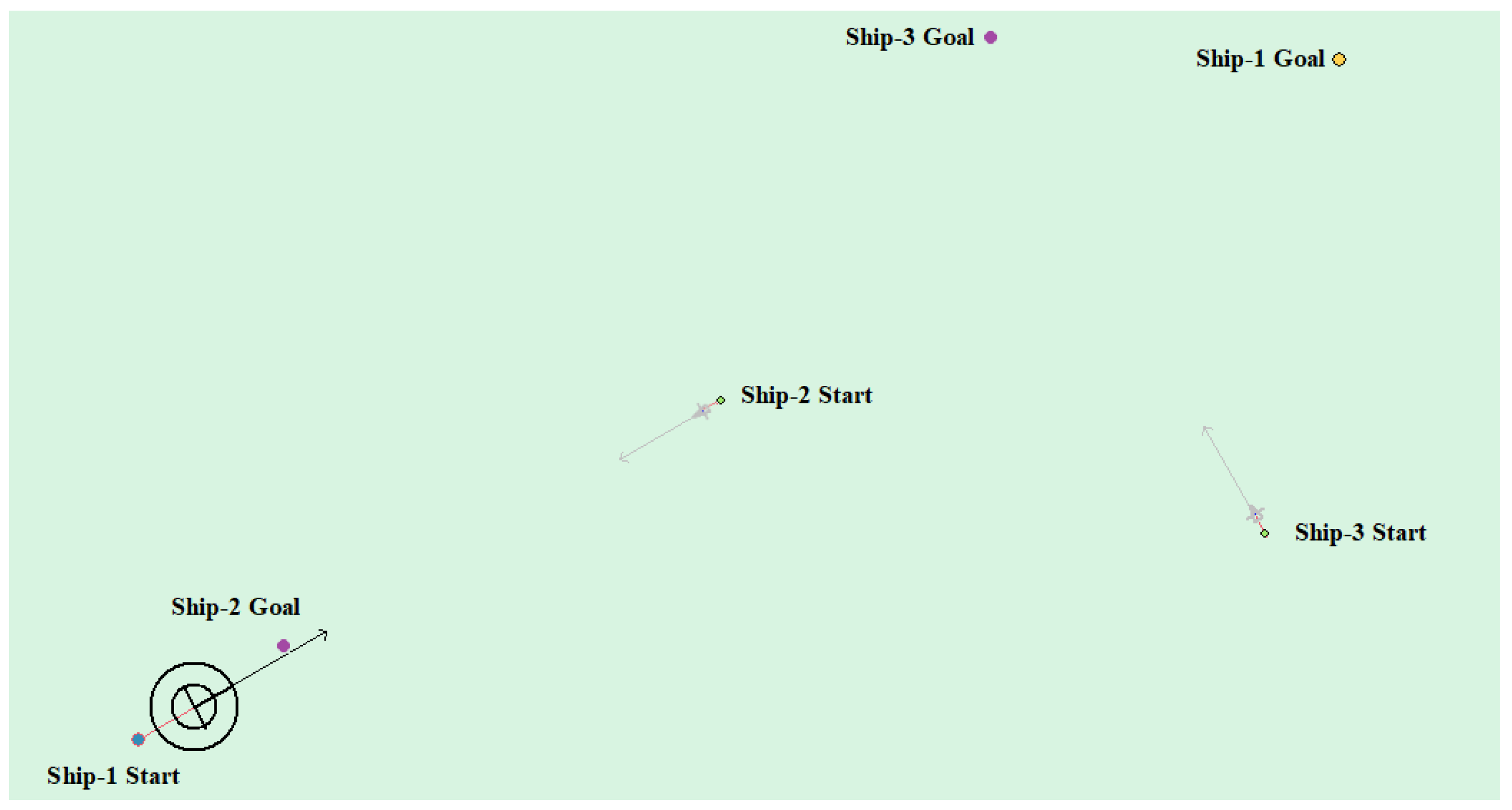
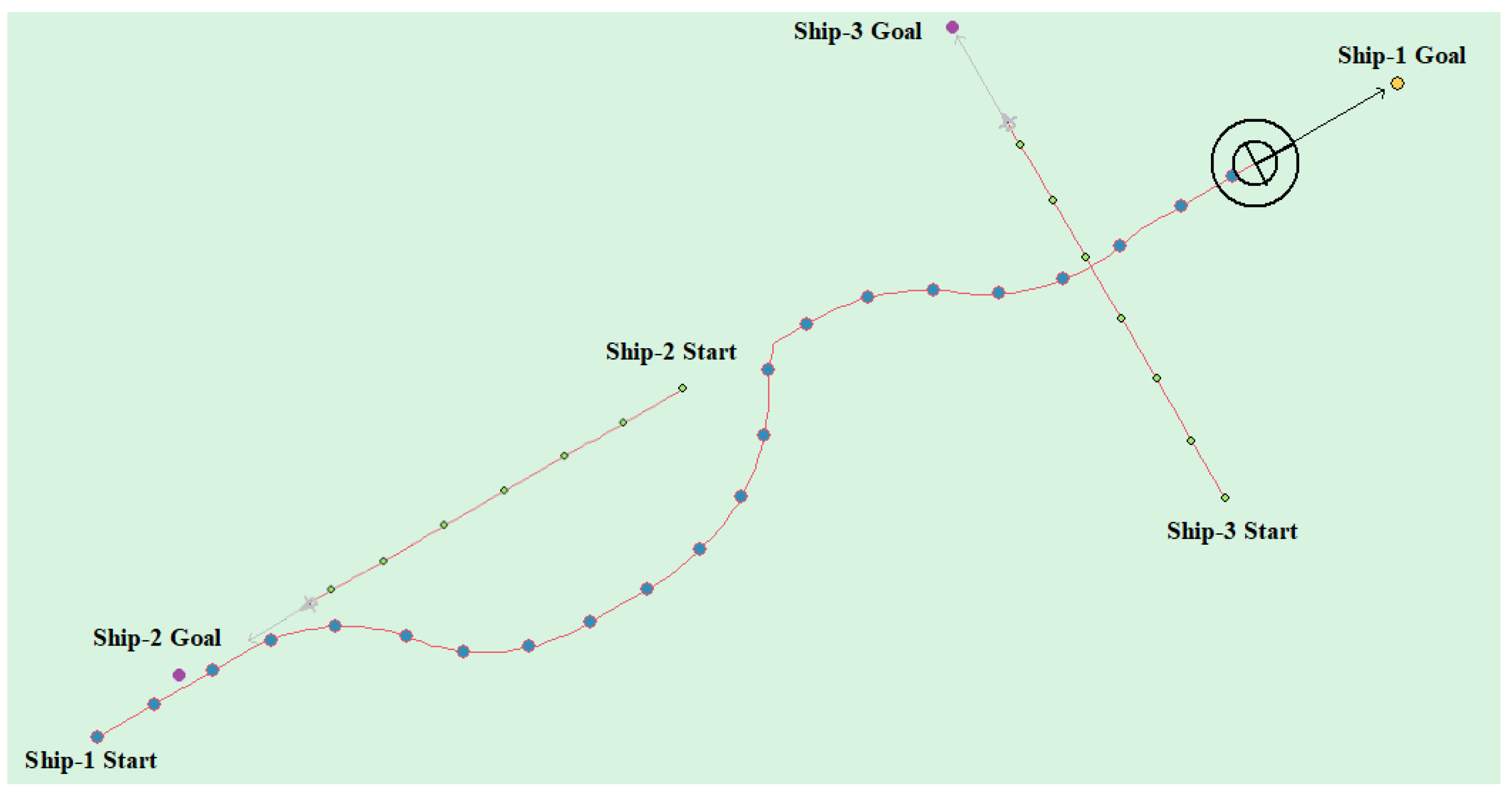
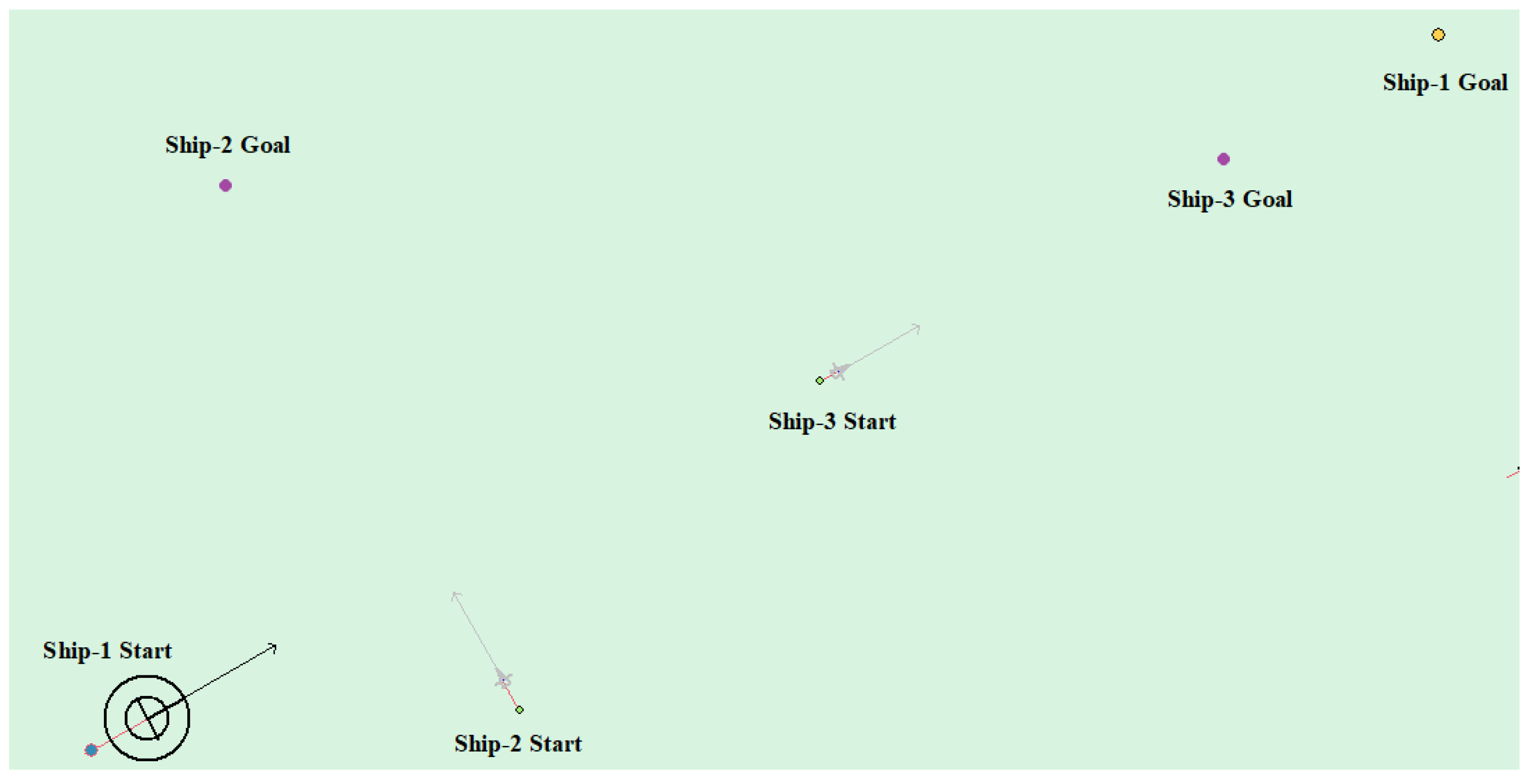
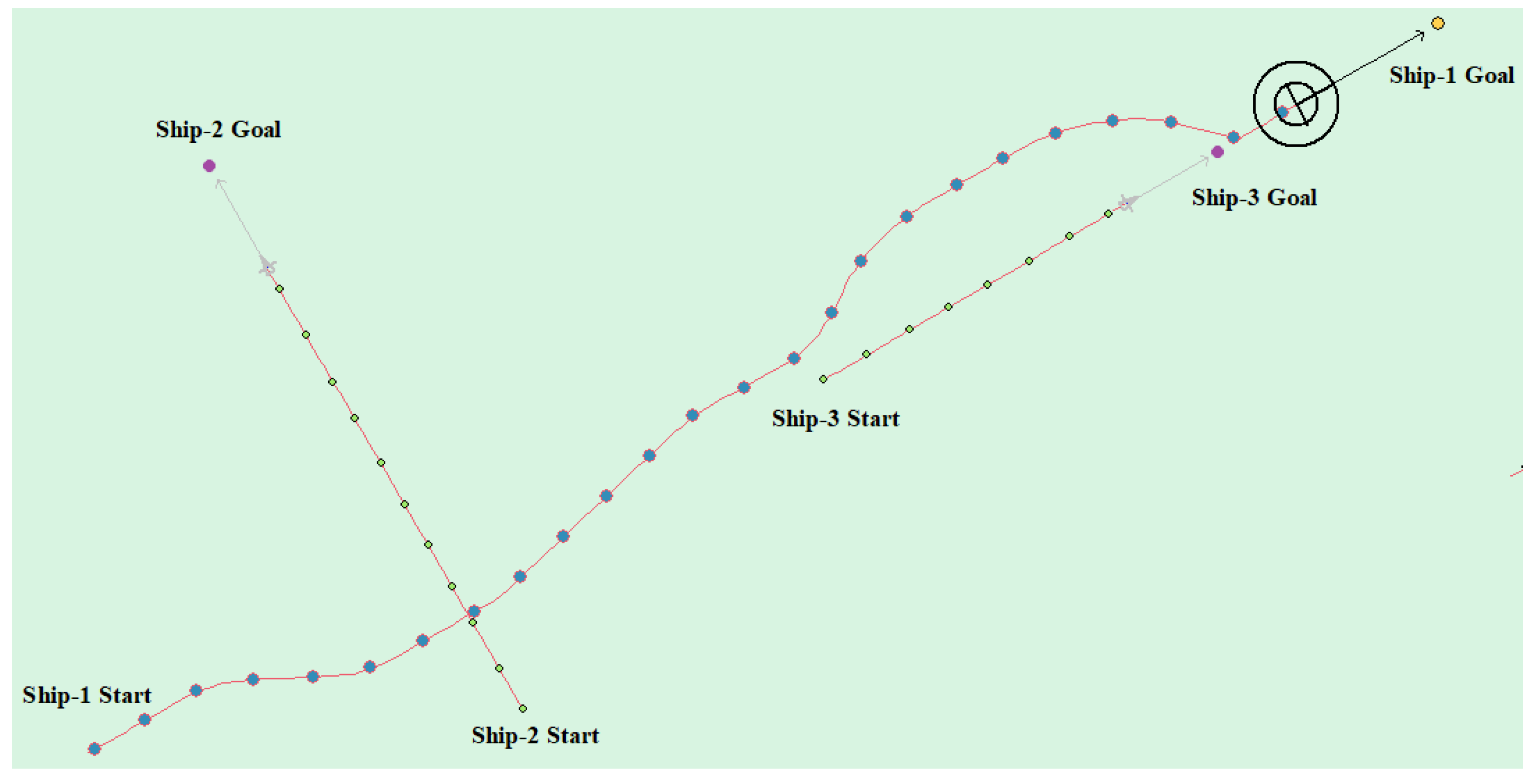
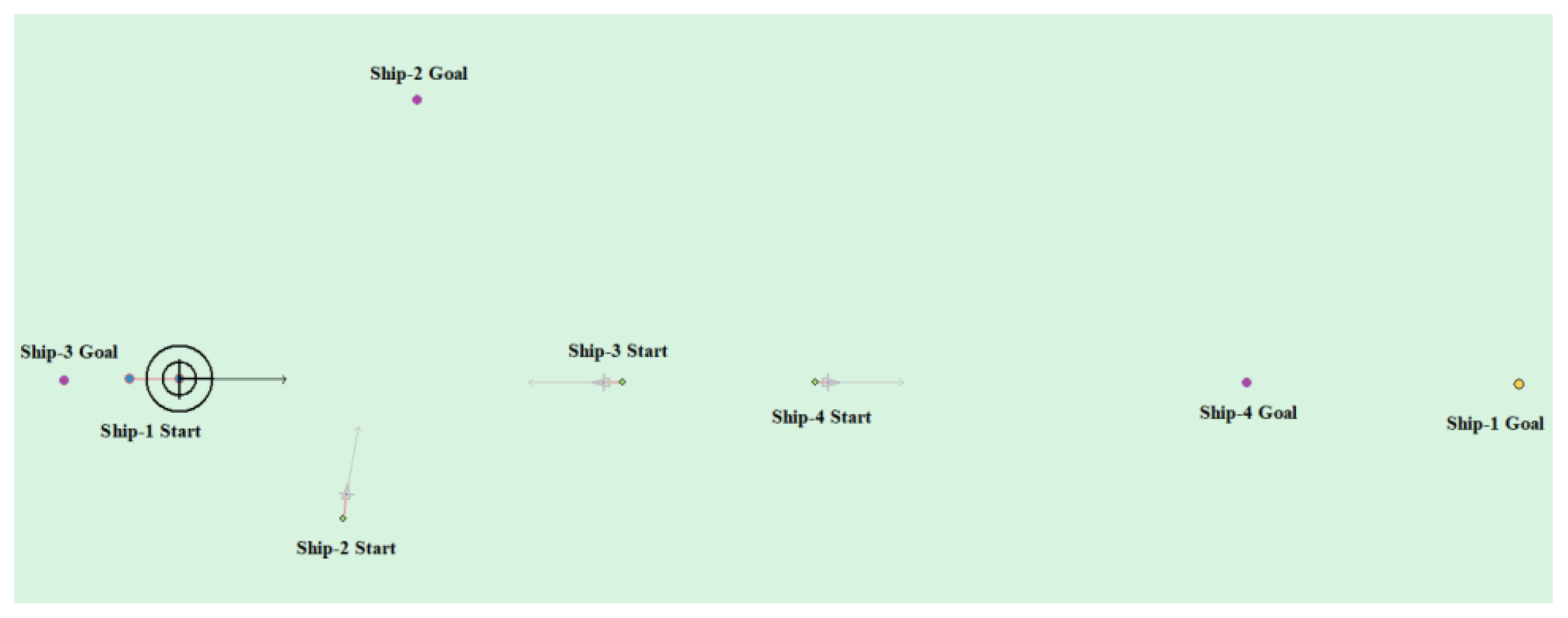
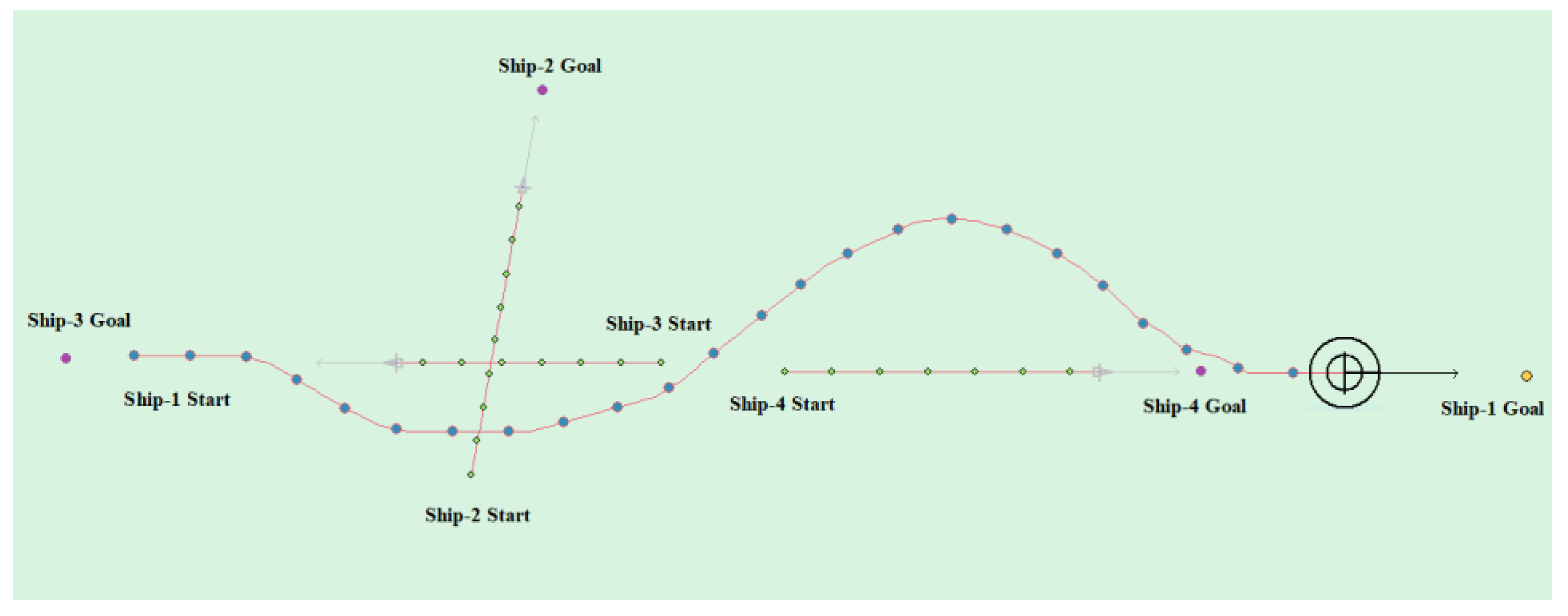
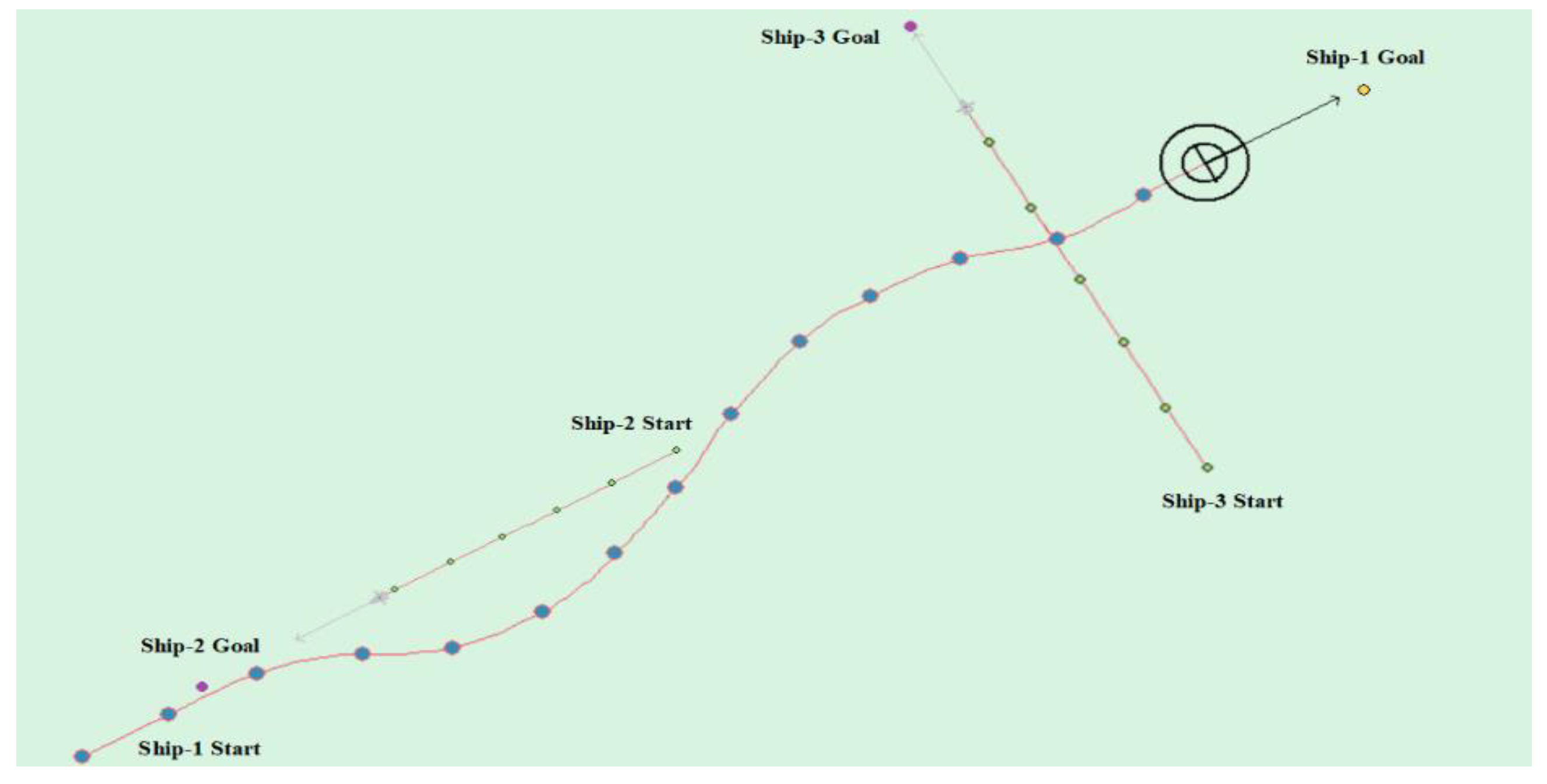
4.3.2. Validation Results
4.4. Improved Model of Autonomous Path Planning
- The potential field is constructed according to the target point and the obstacle in the virtual environment, and the gravity potential field with the target point as the center of the potential field is established.
- Define the potential energy value in the potential energy field as the maximum cumulative report under state , according to Equation (12).
- The ship explores the environment from the starting point and selects the action in the current state . The environment status is updated to state and an immediate return value is received .
- Update the Q value according to the state value function: . Subsequently, update the online Critic network.
- Observe whether the ship reaches the target point or reaches the set maximum number of learning. If the two meets one of them, the round of learning ends and the next iteration is started. Otherwise, return to step (3).
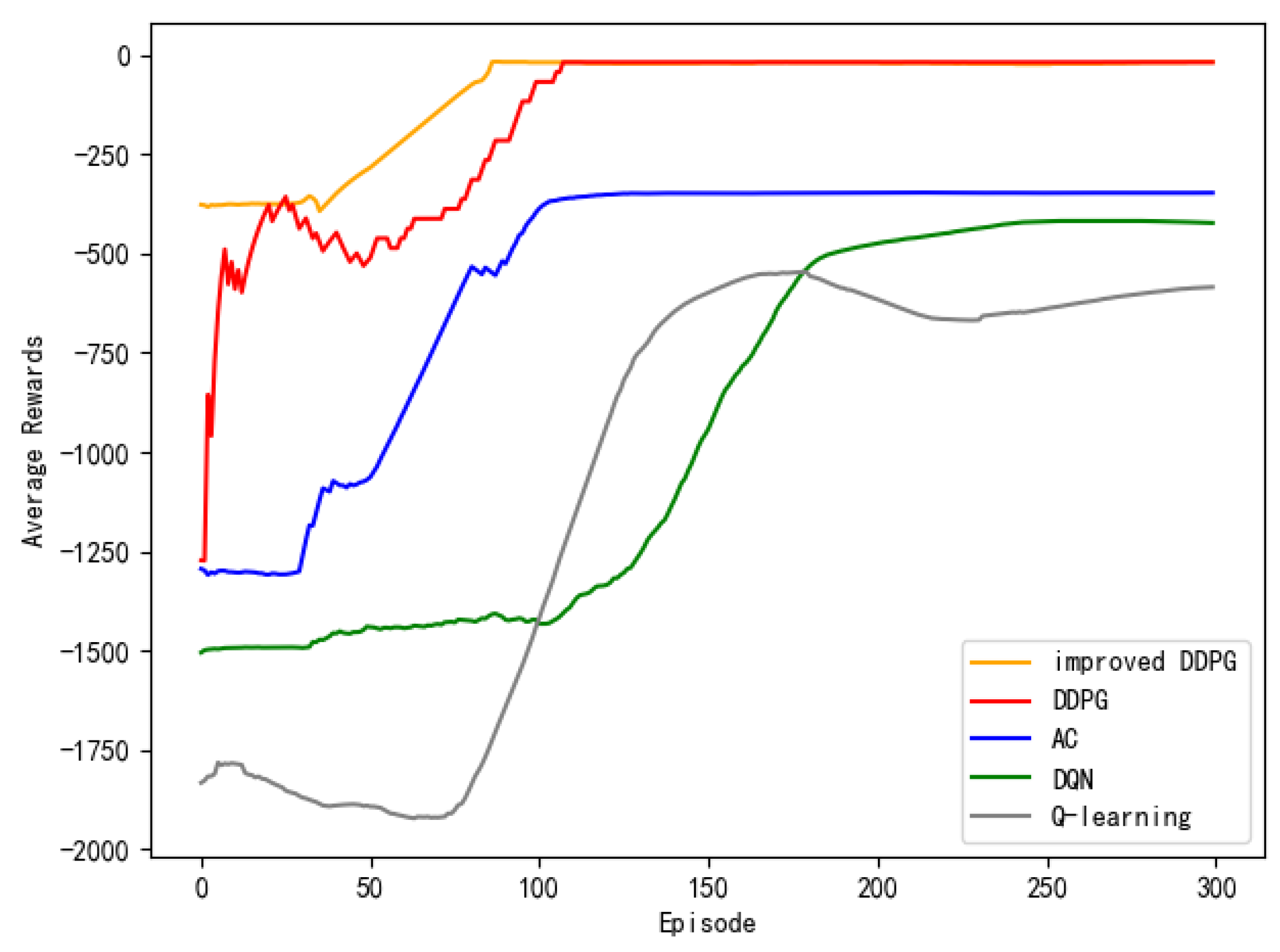
4.5. Experimental Comparison and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, D.G.; Zheng, Z.Y.; Wu, Z.L. Risk analysis system of underway ships in heavy sea. J. Traffic Transp. Eng. 2004, 4, 100–102. [Google Scholar]
- Piao, Z.; Guo, C.; Sun, S. Research into the Automatic Berthing of under actuated Unmanned Ships under Wind Loads Based on Experiment and Numerical Analysis. J. Mar. Sci. Eng. 2019, 7, 300. [Google Scholar] [CrossRef]
- Roberts, G.N.; Sutton, R.; Zirilli, A.; Tiano, A. Intelligent ship autopilots––a historical perspective. Mechatronics 2003, 13, 1091–1103. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Autonomous guidance and navigation based on the COLREGs rules and regulations of collision avoidance. In Proceedings of the International Workshop Advanced Ship Design for Pollution Prevention, Split, Croatia, 23–24 November 2009; pp. 205–216. [Google Scholar]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Introduction to Reinforcement Learning; MIT Press Cambridge: Cambridge, MA, USA, 1998; Volume 135. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529. [Google Scholar] [CrossRef]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 31–36. [Google Scholar]
- Al-Nima, R.R.O.; Han, T.; Chen, T. Road tracking using deep reinforcement learning for self-driving car applications. Int. Conf. Comput. Recognit. Syst. 2019. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Wang, Y. Human-like autonomous car-following model with deep reinforcement learning. Transp. Res. Part C Emerg. Technol. 2018, 97, 348–368. [Google Scholar] [CrossRef]
- Yu, L.; Shao, X.; Wei, Y.; Zhou, K. Intelligent Land-Vehicle Model Transfer Trajectory Planning Method Based on Deep Reinforcement Learning. Sensors 2018, 18, 2905. [Google Scholar]
- Deng, Y.; Bao, F.; Kong, Y.; Ren, Z.; Dai, Q. Deep Direct Reinforcement Learning for Financial Signal Representation and Trading. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 653–664. [Google Scholar] [CrossRef]
- Isele, D.; Rahimi, R.; Cosgun, A.; Subramanian, K.; Fujimura, K. Navigating occluded intersections with autonomous vehicles using deep reinforcement learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2034–2039. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Bahdanau, D.; Brakel, P.; Xu, K.; Goyal, A.; Lowe, G.; Pineau, J.; Courville, A.; Bengio, Y. An Actor-Critic Algorithm for Sequence Prediction. arXiv 2016, arXiv:1607.07086. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. Comput. Sci. 2015, 8, A187. [Google Scholar]
- Chen, C.; Chen, X.Q.; Ma, F.; Zeng, X.J.; Wang, J. A knowledge-free path planning approach for smart ships based on reinforcement learning. Ocean Eng. 2019, 189, 106299. [Google Scholar] [CrossRef]
- Petres, C.; Romero-Ramirez, M.A.; Plumet, F. Reactive path planning for autonomous sailboat. In Proceedings of the 2011 IEEE International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 112–117. [Google Scholar]
- Mankabady, S. The International Maritime Organization, Volume 1: International Shipping Rules; Croom Helm Ltd.: London, UK, 1986; p. 450. [Google Scholar]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe maritime autonomous navigation with COLREGS, using velocity obstacles. IEEE J. Ocean. Eng. 2013, 39, 110–119. [Google Scholar] [CrossRef]
- Campbell, S.; Naeem, W. A rule-based heuristic method for colregs-compliant collision avoidance for an unmanned surface vehicle. IFAC Proc. Vol. 2012, 45, 386–391. [Google Scholar] [CrossRef]
- Xue, Y.; Clelland, D.; Lee, B.S.; Han, D. Automatic simulation of ship navigation. Ocean Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Multi-objective evolutionary algorithm in ship route optimization. In Maritime Technology and Engineering; Taylor & Francis Group: London, UK, 2014; pp. 865–873. [Google Scholar]
- Lazarowska, A. Ship’s trajectory planning for collision avoidance at sea based on ant colony optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Xin, J.; Zhong, J.; Yang, F.; Cui, Y.; Sheng, J. An Improved Genetic Algorithm for Path-Planning of Unmanned Surface Vehicle. Sensors 2019, 19, 2640. [Google Scholar] [CrossRef]
- Xie, S.; Chu, X.; Zheng, M.; Liu, C. Ship predictive collision avoidance method based on an improved beetle antennae search algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar] [CrossRef]
- Fu, K.; Li, Y.; Sun, H.; Yang, X.; Xu, G.; Li, Y.; Sun, X. A Ship Rotation Detection Model in Remote Sensing Images Based on Feature Fusion Pyramid Network and Deep Reinforcement Learning. Remote Sens. 2018, 10, 1922. [Google Scholar] [CrossRef]
- Yang, J.; Liu, L.; Zhang, Q.; Liu, C. Research on Autonomous Navigation Control of Unmanned Ship Based on Unity3D. In Proceedings of the 2019 IEEE International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 2251–2446. [Google Scholar]
- Shen, H.Q.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic collision avoidance of multiple ships based on deep Q-learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Zhang, R.B.; Tang, P.; Su, Y.; Li, X.; Yang, G.; Shi, C. An adaptive obstacle avoidance algorithm for unmanned surface vehicle in complicated marine environments. IEEE CAA J. Autom. Sin. 2014, 1, 385–396. [Google Scholar]
- Wang, Y.; Tong, J.; Song, T.Y.; Wan, Z.H. Unmanned Surface Vehicle Course Tracking Control Based on Neural Network and Deep Deterministic Policy Gradient Algorithm. In Proceedings of the OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar]
- Zhang, X.; Wang, C.; Liu, Y.; Chen, X. Decision-Making for the Autonomous Navigation of Maritime Autonomous Surface Ships Based on Scene Division and Deep Reinforcement Learning. Sensors 2019, 19, 4055. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Roh, M.I. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Lisowski, J.; Mohamed-Seghir, M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sens. 2019, 11, 82. [Google Scholar] [CrossRef]
- Serrano, W. Deep Reinforcement Learning Algorithms in Intelligent Infrastructure. Infrastructures 2019, 4, 52. [Google Scholar] [CrossRef]
- Ting-Ying, B.A.I. International Standards of Electronic Chart Display and Information System. Hydrogr. Surv. Charting 2004, 2, 67–70. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Data Type | Data Value | Data Sources |
|---|---|---|---|
| 1 | Longitude | 121°30.43′ E | AIS |
| 2 | Latitude | 37°47.30′ N | AIS |
| 3 | SOG | 17.5 | AIS |
| 4 | COG | 10.70° | AIS |
| 5 | HDG | 10.00° | AIS |
| 6 | DRIFT | 0.7° | AIS |
| Name | Parameters | Description |
|---|---|---|
| Longitude | [0°, 180°] E, [0°, 180°] W | Ship longitude |
| Latitude | [0°, 90°] N, [0°, 90°] S | Ship latitude |
| Direction | [0°, 360°] | Ship heading |
| Speed | [0, 30] kn | Ship speed |
| Angel | [0°, 360°] | Angle with target point |
| Tracks | (0, 1000)/m | Array of distances from obstacles |
| Name | Parameters | Description |
|---|---|---|
| Steering | [−1, 1] | Deflection angle (−1 for right full rudder, 1 for left full rudder) |
| Shifting | [−1, 1] | Speed increment (−1 for full deceleration, 1 for full acceleration) |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.104, E 121.105) | (N 38.104, E 121.134) | 90° | 28 kn |
| Ship-2 | (N 38.104, E 121.113) | (N 38.104, E 121.106) | 270° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.104, E 121.105) | (N 38.104, E 121.134) | 90° | 28 kn |
| Ship-2 | (N 38.193, E 121.112) | (N 38.221, E 121.112) | 0° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.104, E121.105) | (N 38.104, E 121.134) | 90° | 28 kn |
| Ship-2 | (N 38.221, E121.112) | (N 38.193, E 121.112) | 180° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.203, E 121.134) | (N 38.203, E 121.246) | 90° | 28 kn |
| Ship-2 | (N 38.203, E 121.137) | (N 38.203, E 121.236) | 90° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.203, E 121.134) | (N 38.245, E 121.257) | 60° | 28 kn |
| Ship-2 | (N 38.220, E 121.174) | (N 38.221, E 121.152) | 240° | 18 kn |
| Ship-3 | (N 38.232, E 121.236) | (N 38.254, E 121.232) | 330° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.203, E 121.134) | (N 38.264, E 121.264) | 60° | 28 kn |
| Ship-2 | (N 38.204, E 121.185) | (N 38.235, E 121.164) | 330° | 18 kn |
| Ship-3 | (N 38.231, E 121.228) | (N 38.258, E 121.248) | 60° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.203, E 121.134) | (N 38.264, E 121.264) | 60° | 28 kn |
| Ship-2 | (N 38.235, E 121.164) | (N 38.204, E 121.184) | 150° | 18 kn |
| Ship-3 | (N 38.231, E 121.228) | (N 38.258, E 121.248) | 60° | 18 kn |
| Starting Point | Target Point | Heading Angle | Ship Speed | |
|---|---|---|---|---|
| Ship-1 | (N 38.203, E 121.134) | (N 38.203, E 121.278) | 90° | 28 kn |
| Ship-2 | (N 38.184, E 121. 138) | (N 38.246, E 121.141) | 10° | 18 kn |
| Ship-3 | (N 38.203, E 121.164) | (N 38.203, E 121.131) | 270° | 18 kn |
| Ship-4 | (N 38.202, E 121.245) | (N 38.201, E 121.257) | 90° | 18 kn |
| Comparative Experiment | Total Iteration Time (s) | Optimal Decision Time(s) | Convergence Steps | Number of Collisions |
|---|---|---|---|---|
| DQN | 452.512 | 410.856 | 235 | 139 |
| AC | 361.219 | 332.463 | 136 | 84 |
| DDPG | 338.713 | 281.651 | 122 | 72 |
| Q-learning | 486.321 | 437.245 | 260 | 175 |
| APF-DDPG | 294.960 | 236.152 | 68 | 63 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Zhang, X.; Zheng, Y.; Du, Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors 2020, 20, 426. https://doi.org/10.3390/s20020426
Guo S, Zhang X, Zheng Y, Du Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors. 2020; 20(2):426. https://doi.org/10.3390/s20020426
Chicago/Turabian StyleGuo, Siyu, Xiuguo Zhang, Yisong Zheng, and Yiquan Du. 2020. "An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning" Sensors 20, no. 2: 426. https://doi.org/10.3390/s20020426
APA StyleGuo, S., Zhang, X., Zheng, Y., & Du, Y. (2020). An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors, 20(2), 426. https://doi.org/10.3390/s20020426