A Novel Roll and Pitch Estimation Approach for a Ground Vehicle Stability Improvement Using a Low Cost IMU


Abstract
1. Introduction
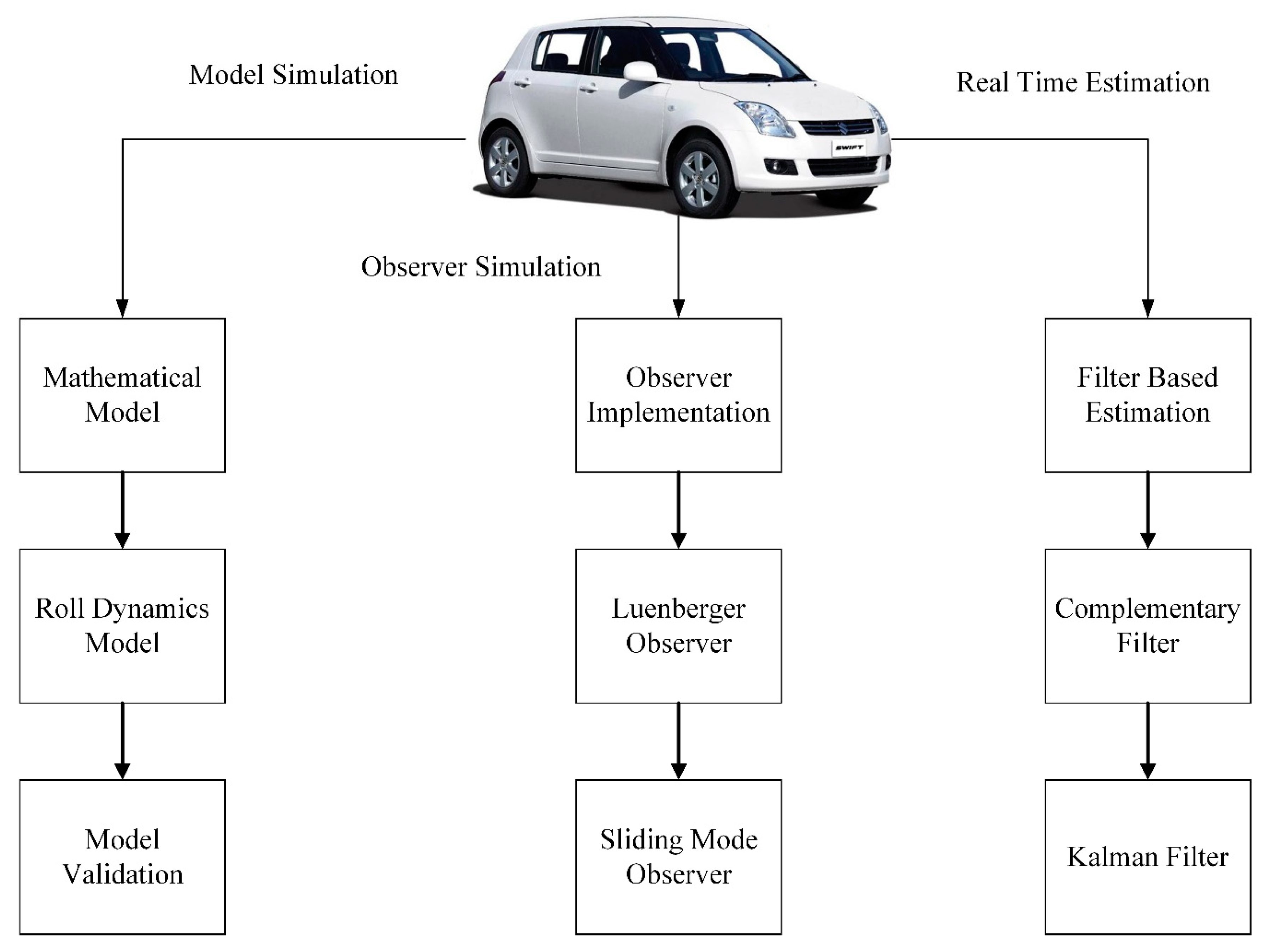
2. Materials and Methods
2.1. Mathematical Modelling and Validation
Mathematical Modeling
2.2. Observer Based Estimation
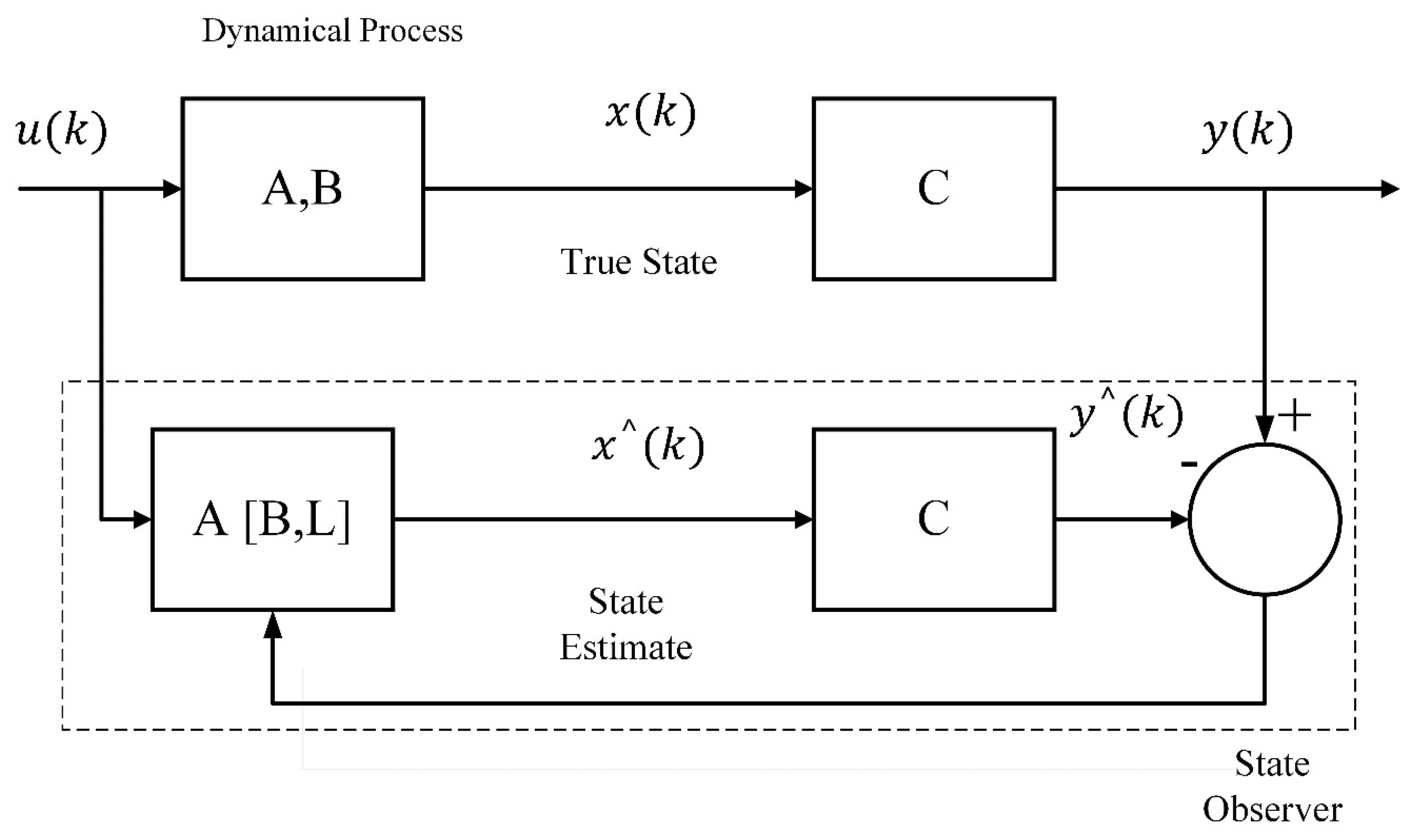
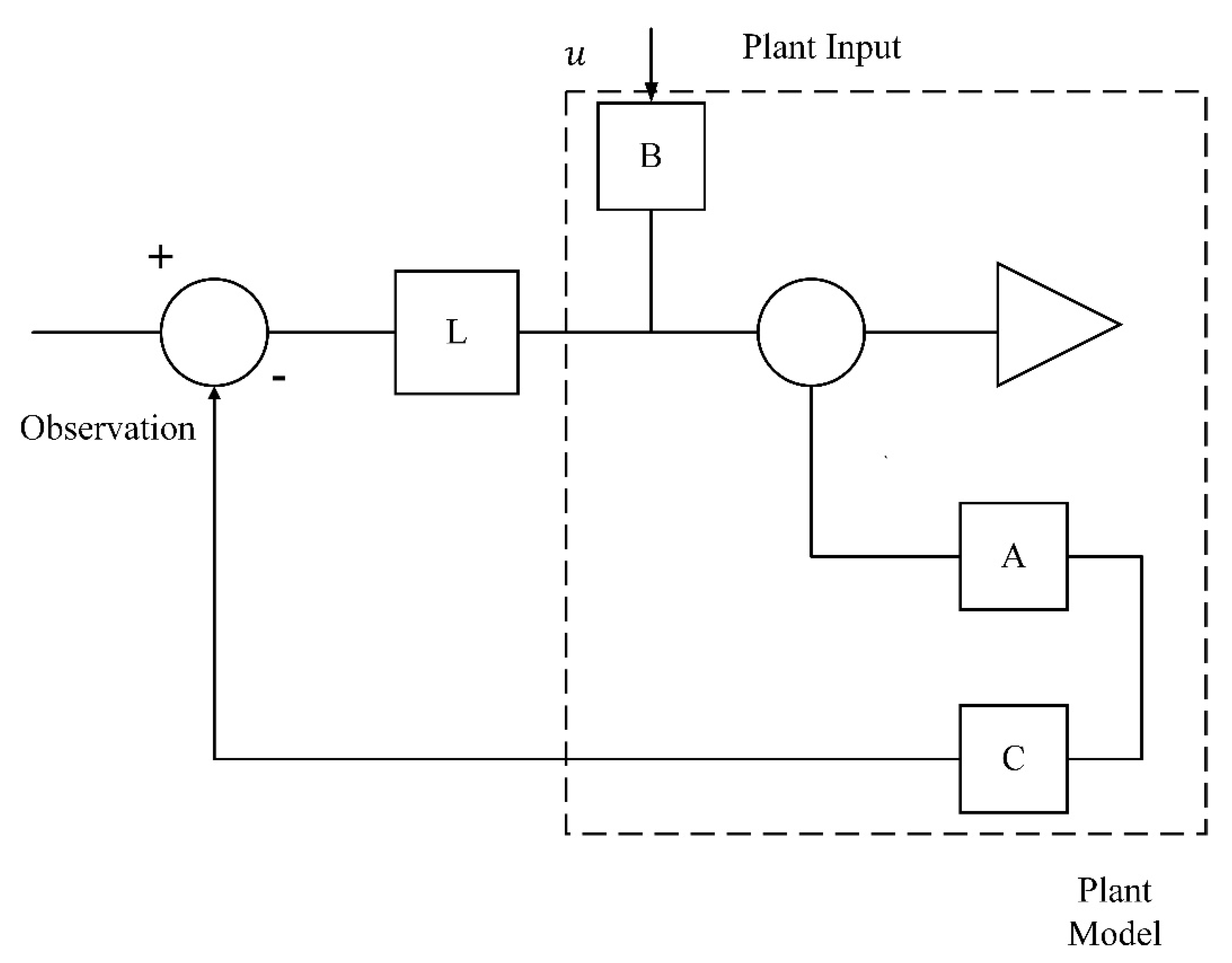
2.2.1. Luenberger Observers
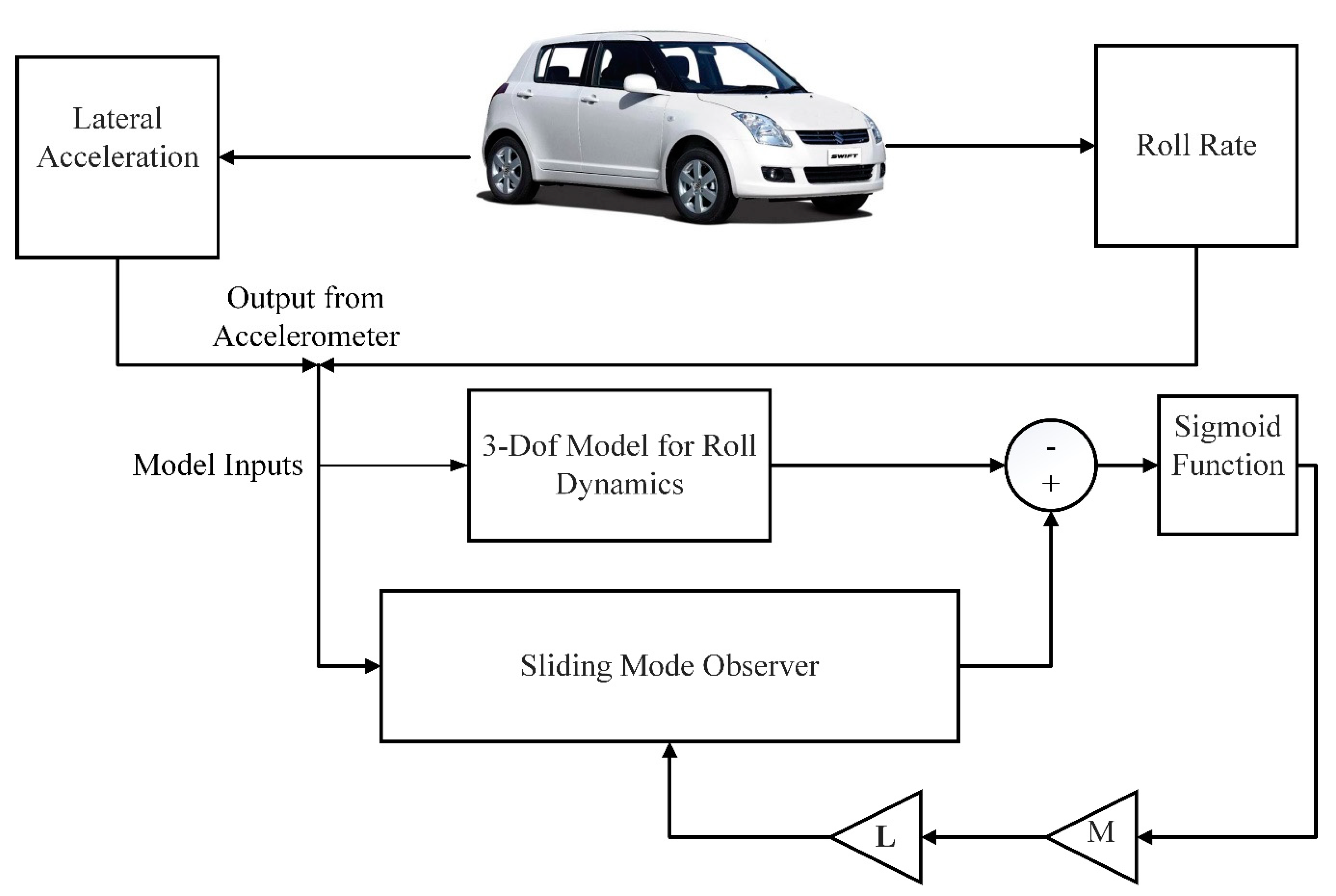
2.2.2. Sliding Mode Observer
2.3. Filter Based Estimation
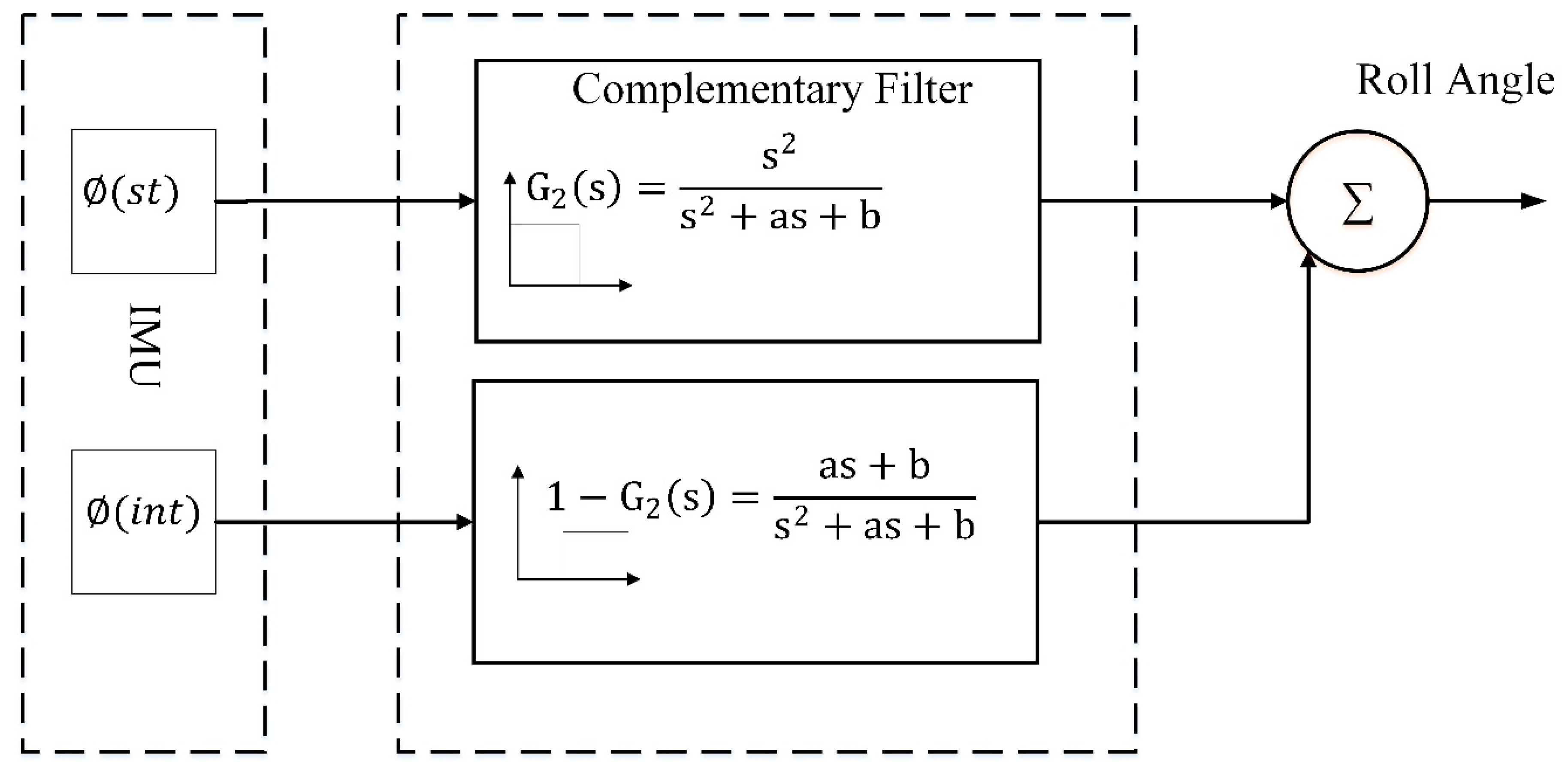
2.3.1. The Complementary Filter
- The product of pitch angle and yaw rate is small. The roll angle can be obtained by integration of the roll rate obtained by the gyroscope.
- If the vehicle is in steady state condition, the time derivative of would be small and roll angle can be calculated through Equation (37).
- Pitch angle can be determined from the Equation (38) when roll angle gets known.
2.3.2. Kalman Filter Implementation
3. Experiment and Results
3.1. Model Validation
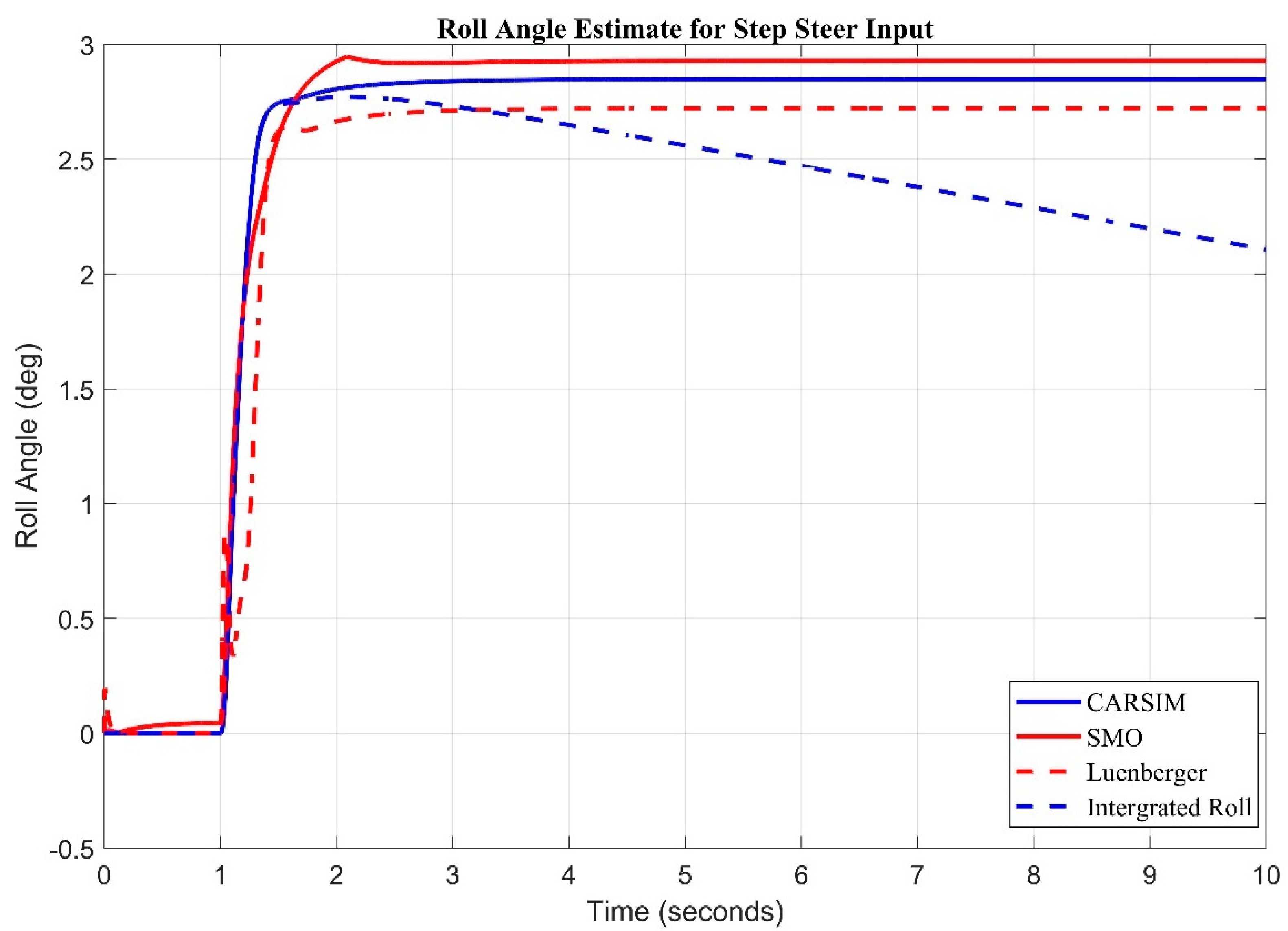
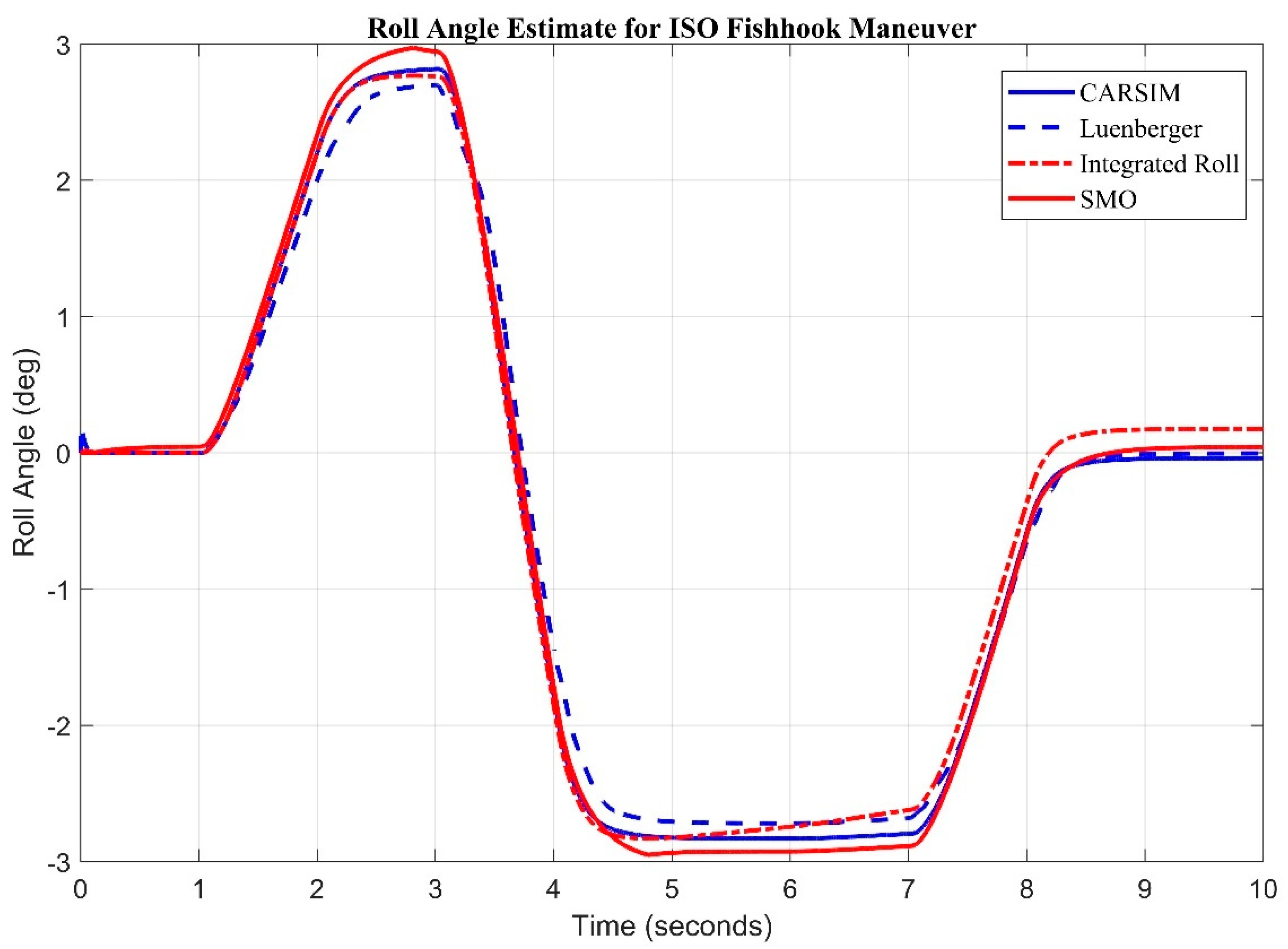
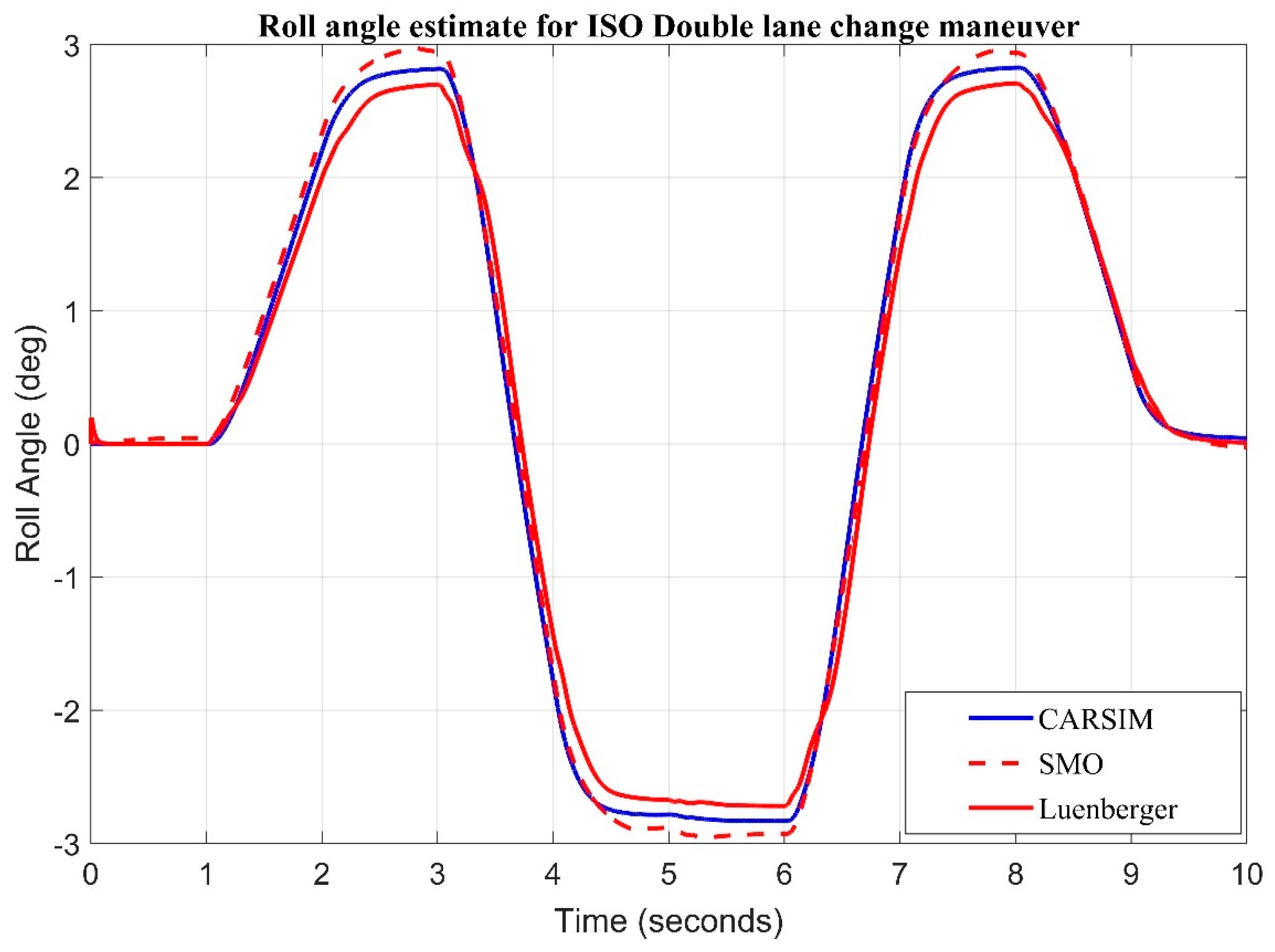
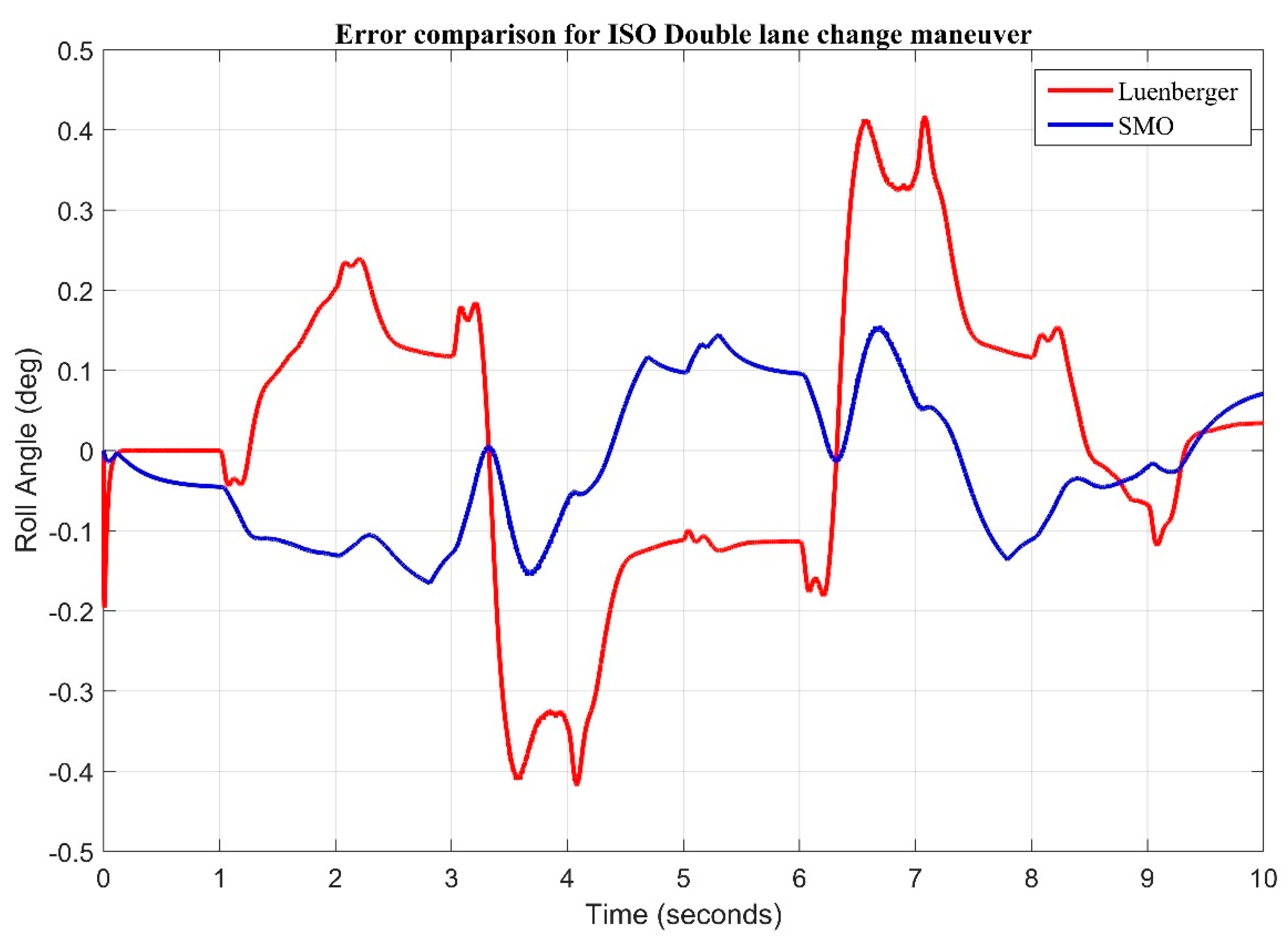
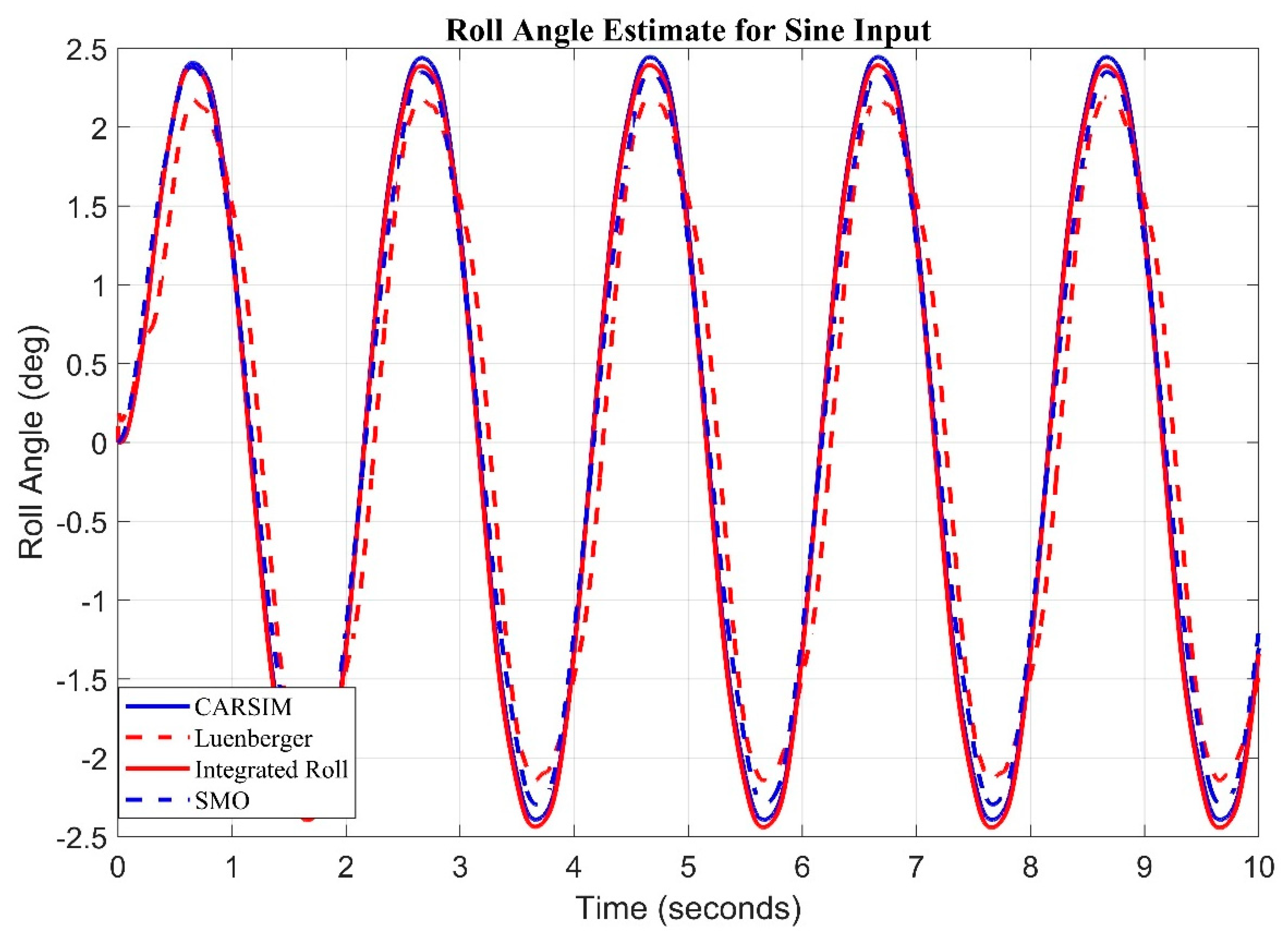
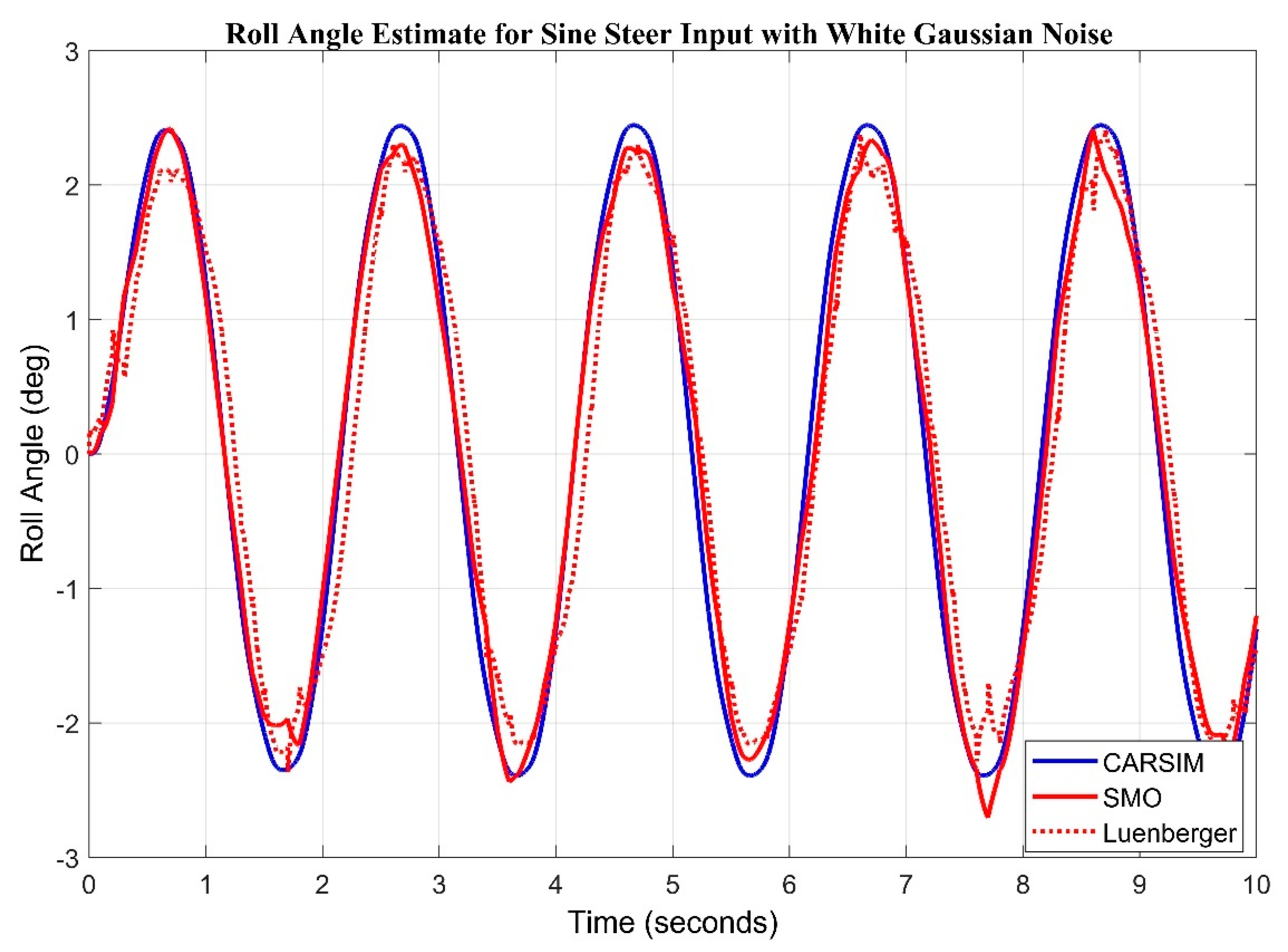
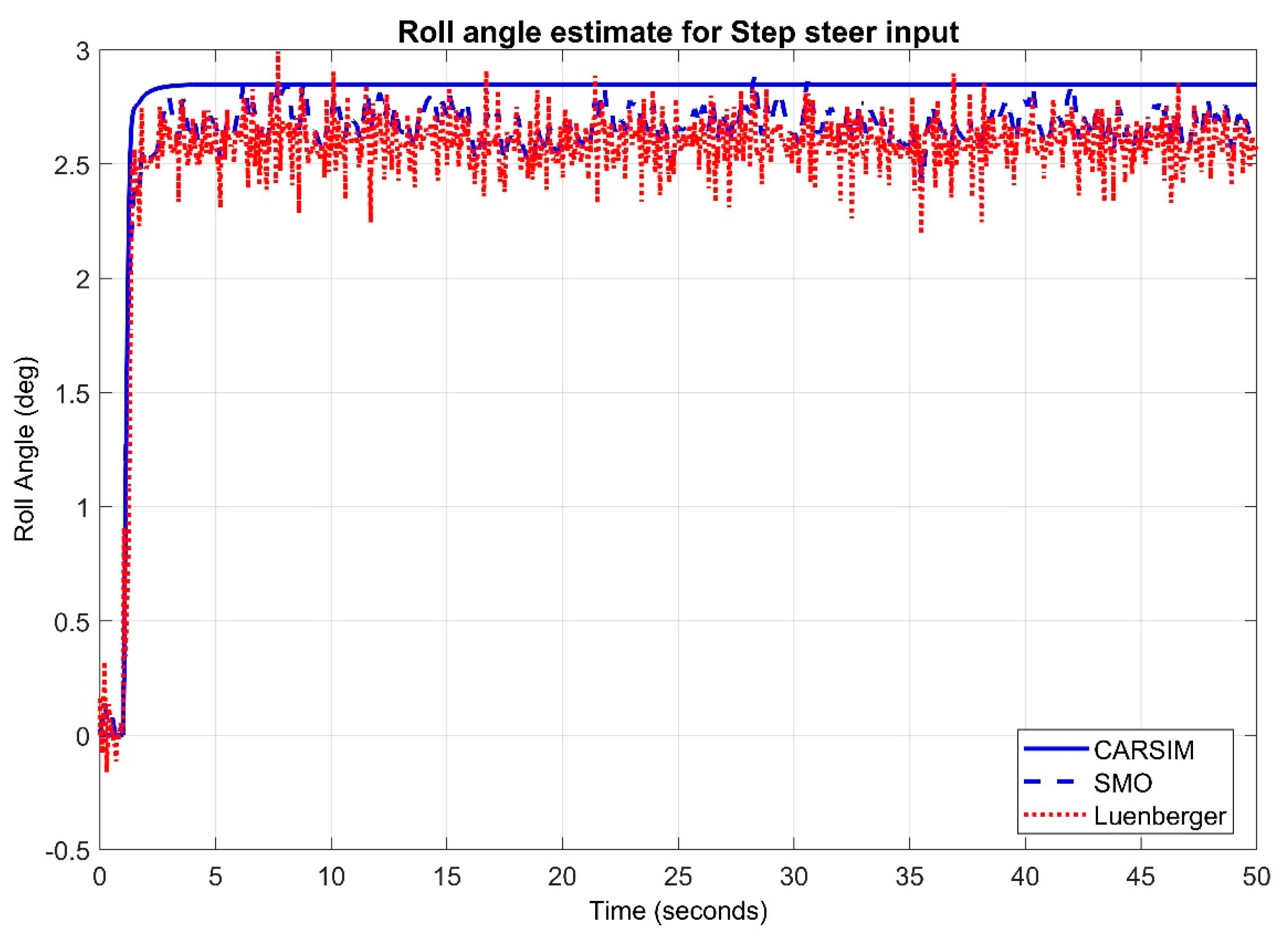
3.2. Simulated Results for Luenberger & Sliding Mode Observer
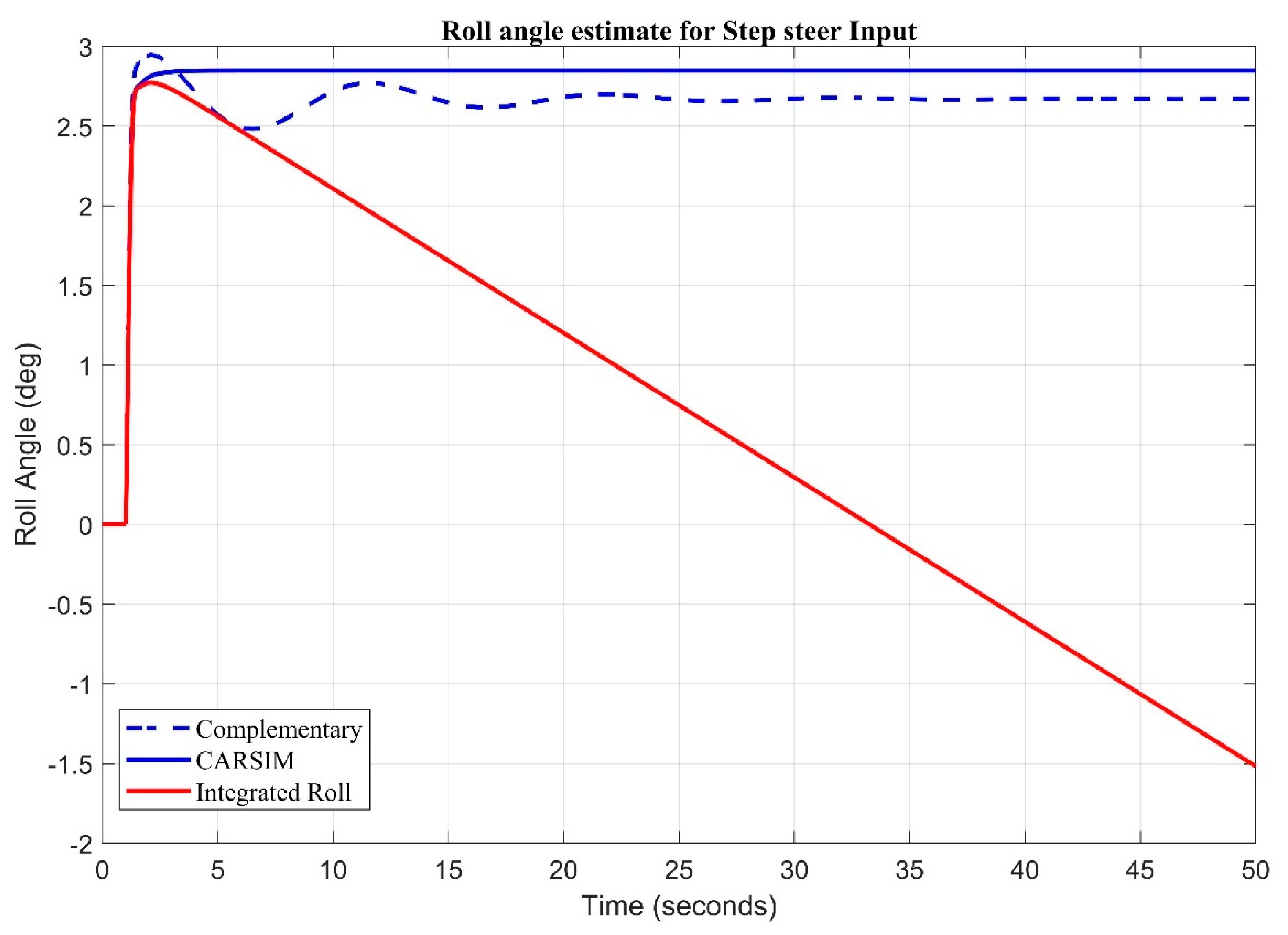
3.3. Simulated Results Comparison of Complementary Filter with CARSIM®
3.4. Real Time Complemenary Filter Implementation
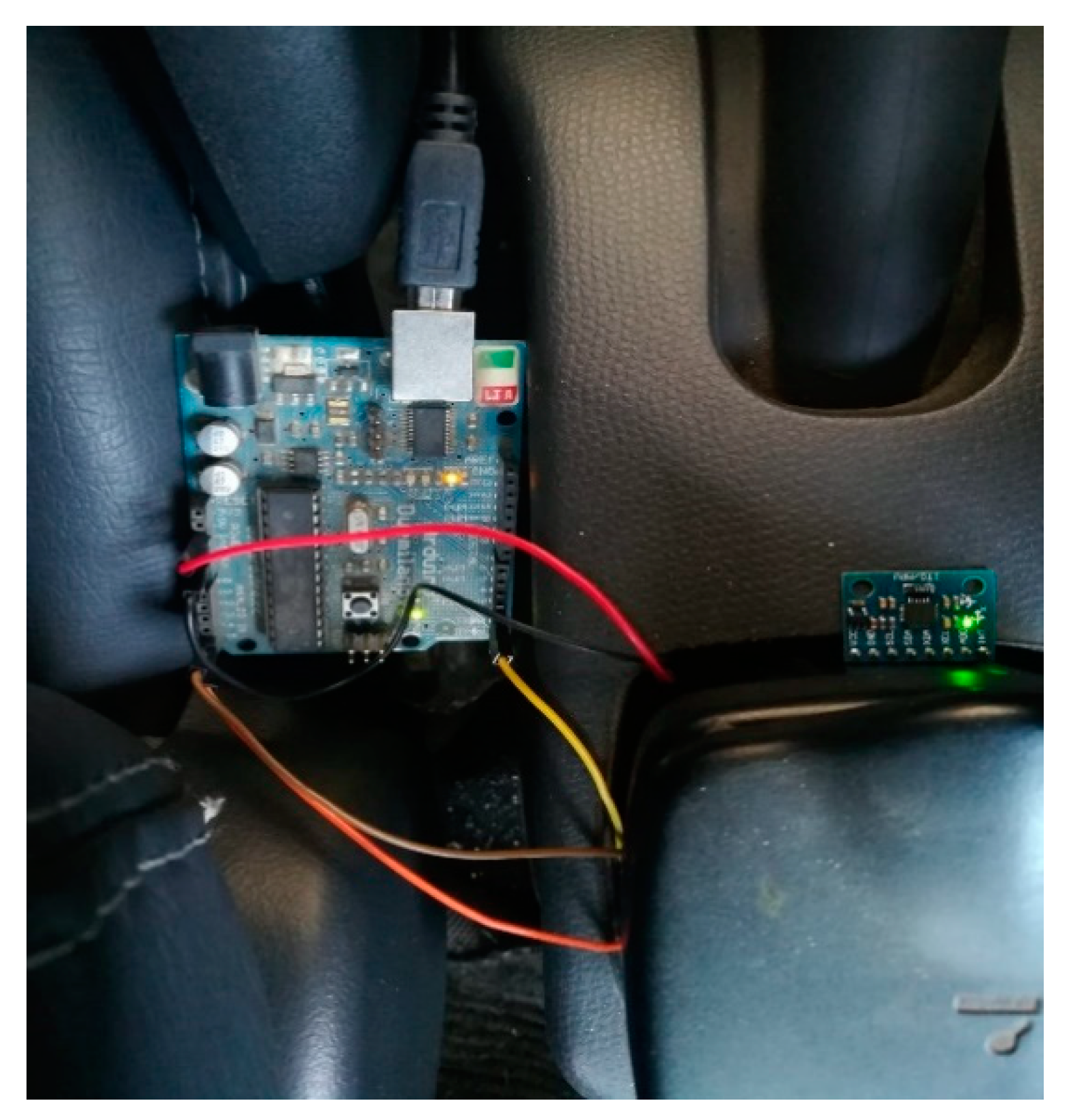
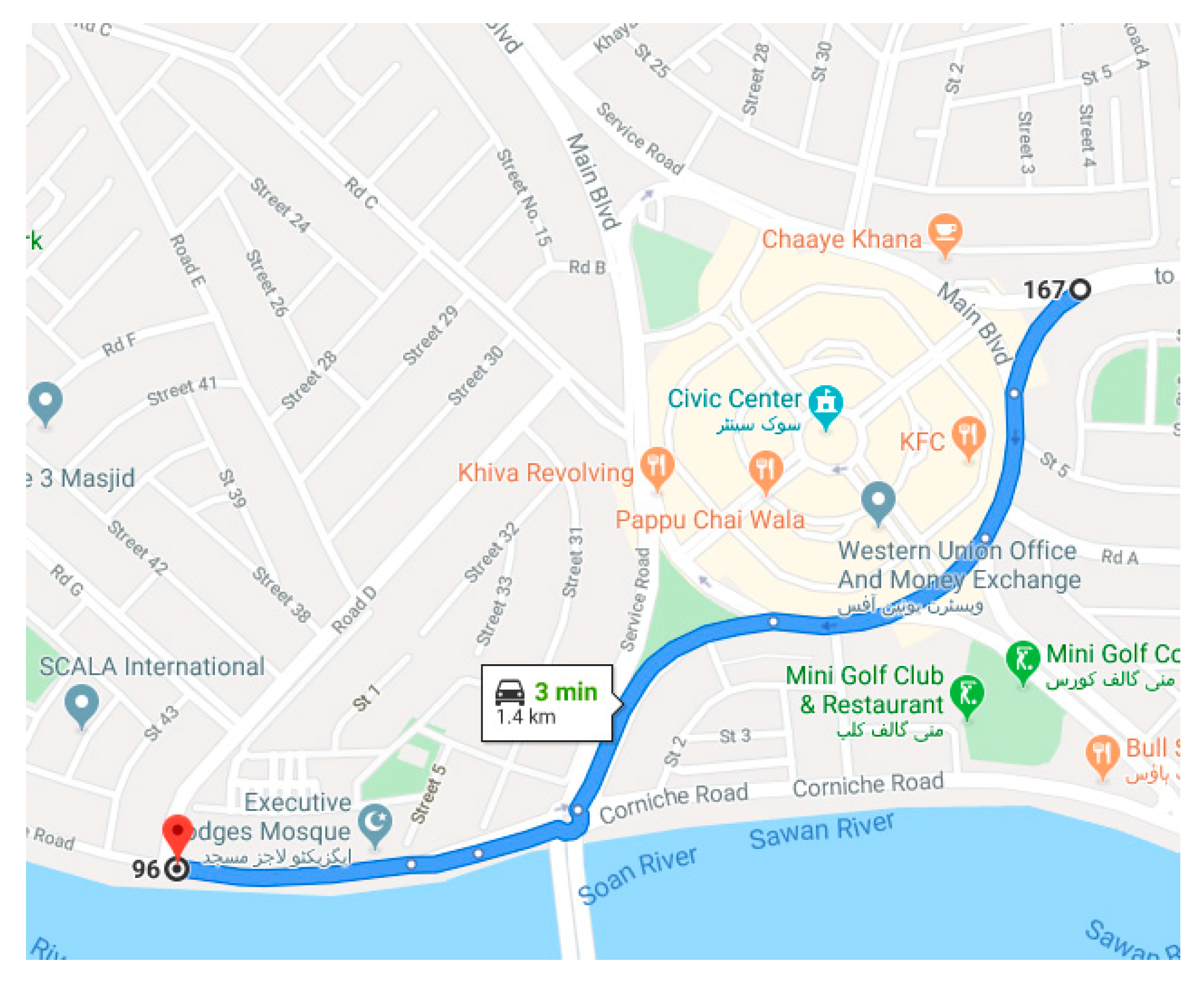
Experimental Setup
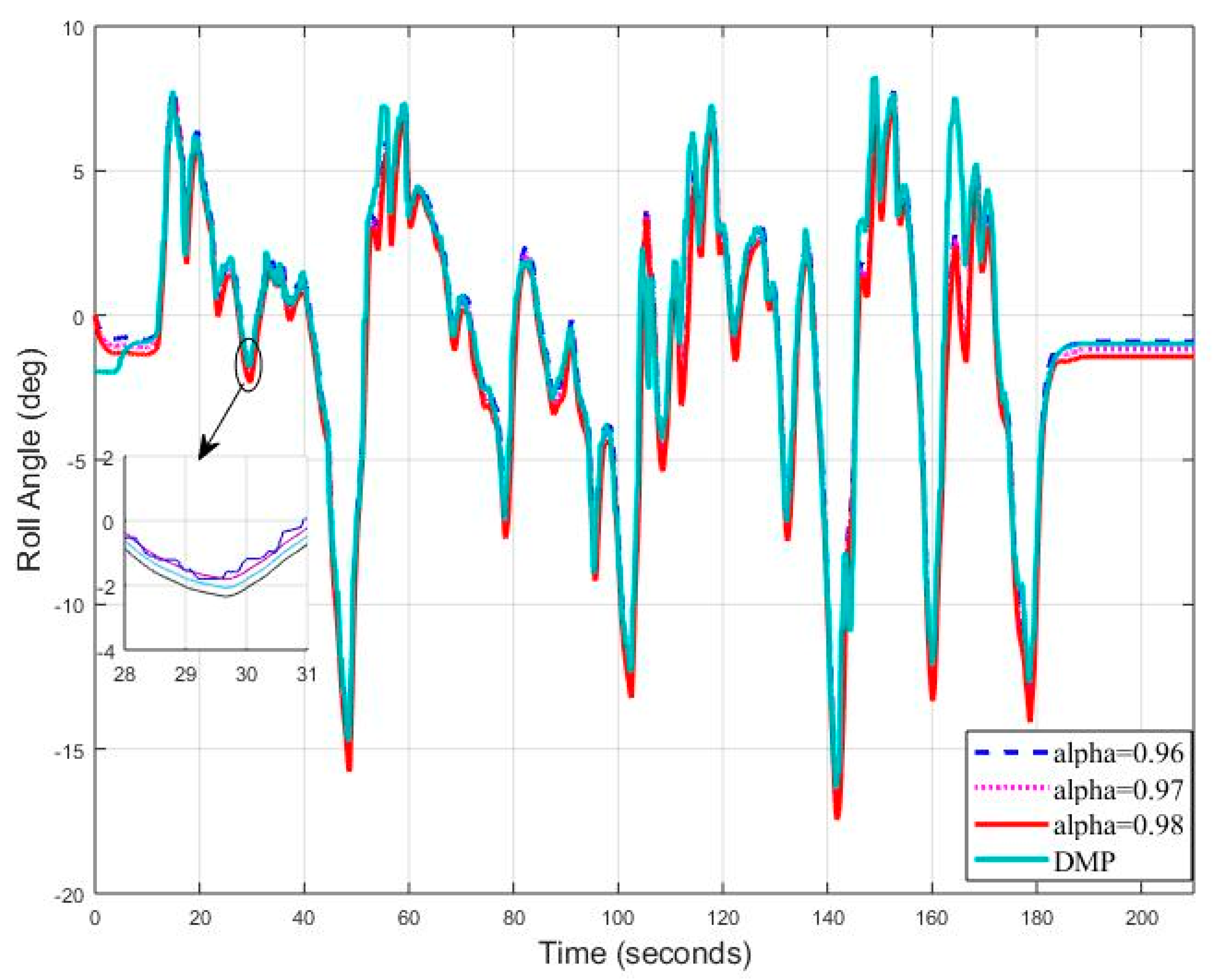
3.5. Real Time Complemenary Filter Implementation
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Boada, M.; Boada, B.; Munoz, A.; Diaz, V. Integrated control of front-wheel steering and front braking forces on the basis of fuzzy logic. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 220, 253–267. [Google Scholar] [CrossRef]
- Boada, M.J.L.; Boada, B.L.; Gauchia Babe, A.; Calvo Ramos, J.A.; Lopez, V.D. Active roll control using reinforcement learning for a single unit heavy vehicle. Int. J. Heavy Veh. Syst. 2009, 16, 412–430. [Google Scholar] [CrossRef]
- Lu, Q.; Gentile, P.; Tota, A.; Sorniotti, A.; Gruber, P.; Costamagna, F.; De Smet, J. Enhancing vehicle cornering limit through sideslip and yaw rate control. Mech. Syst. Signal Process. 2016, 75, 455–472. [Google Scholar] [CrossRef]
- Reina, G.; Paiano, M.; Blanco-Claraco, J.-L. Vehicle parameter estimation using a model-based estimator. Mech. Syst. Signal Process. 2017, 87, 227–241. [Google Scholar] [CrossRef]
- Boada, B.; Boada, M.; Diaz, V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm. Mech. Syst. Signal Process. 2016, 72, 832–845. [Google Scholar] [CrossRef]
- Rajamani, R.; Piyabongkarn, D.N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Trans. Intell. Transp. Syst. 2012, 14, 249–261. [Google Scholar] [CrossRef]
- Garcia Guzman, J.; Prieto Gonzalez, L.; Pajares Redondo, J.; Sanz Sanchez, S.; Boada, B.L. Design of Low-Cost Vehicle Roll Angle Estimator Based on Kalman Filters and an Iot Architecture. Sensors 2018, 18, 1800. [Google Scholar] [CrossRef]
- Vargas-Meléndez, L.; Boada, B.; Boada, M.; Gauchía, A.; Díaz, V. A sensor fusion method based on an integrated neural network and Kalman filter for vehicle roll angle estimation. Sensors 2016, 16, 1400. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Han, Y.; Yu, Z. IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics. Sensors 2019, 19, 1930. [Google Scholar] [CrossRef]
- Rajamani, R.; Piyabongkarn, D.; Tsourapas, V.; Lew, J.Y. Parameter and state estimation in vehicle roll dynamics. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1558–1567. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, Z. Vehicle velocity and roll angle estimation with road and friction adaptation for four-wheel independent drive electric vehicle. Math. Probl. Eng. 2014, 2014, 801628. [Google Scholar] [CrossRef]
- Jiang, K.; Victorino, A.C.; Charara, A. Real-time estimation of vehicle’s lateral dynamics at inclined road employing extended kalman filter. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 2360–2365. [Google Scholar]
- Doumiati, M.; Baffet, G.; Lechner, D.; Victorino, A.; Charara, A. Embedded estimation of the tire/road forces and validation in a laboratory vehicle. In Proceedings of the 9th International Symposium on Advanced Vehicle Control, Kobe, Japan, 6–9 October 2008; pp. 6–9. [Google Scholar]
- Scholte, W.J.; Marco, V.R.; Nijmeijer, H. Experimental Validation of Vehicle Velocity, Attitude and IMU Bias Estimation. IFAC-PapersOnLine 2019, 52, 118–123. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Liu, W.; Yu, Z. Automated Vehicle Attitude and Lateral Velocity Estimation Using a 6-D IMU Aided by Vehicle Dynamics. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1563–1569. [Google Scholar]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of Nonlinear Attitude Estimation Methods. J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Multi-constellation GNSS performance evaluation for urban canyons using large virtual reality city models. J. Navig. 2012, 65, 459–476. [Google Scholar] [CrossRef]
- Tahir, M.; Mazher, K. Singular spectrum based smoothing of GNSS pseudorange dynamics. IEEE Commun. Lett. 2016, 20, 1551–1554. [Google Scholar] [CrossRef]
- Tanenhaus, M.; Carhoun, D.; Geis, T.; Wan, E.; Holland, A. Miniature IMU/INS with optimally fused low drift MEMS gyro and accelerometers for applications in GPS-denied environments. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 259–264. [Google Scholar]
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. In Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles (Cat. No. 98CH36290), Cambridge, MA, USA, 20–21 August 1998; pp. 55–62. [Google Scholar]
- Woodman, O.J. An Introduction to Inertial Navigation; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- El-Diasty, M.; El-Rabbany, A.; Pagiatakis, S. Temperature variation effects on stochastic characteristics for low-cost MEMS-based inertial sensor error. Meas. Sci. Technol. 2007, 18, 3321. [Google Scholar] [CrossRef]
- Acar, C.; Schofield, A.R.; Trusov, A.A.; Costlow, L.E.; Shkel, A.M. Environmentally robust MEMS vibratory gyroscopes for automotive applications. IEEE Sens. J. 2009, 9, 1895–1906. [Google Scholar] [CrossRef]
- Ahmed, H.; Tahir, M. Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensors. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1723–1739. [Google Scholar] [CrossRef]
- Rath, J.; Ward, P. Attitude estimation using GPS. In Proceedings of the National Technical Meeting (A90-36914 15-04), San Mateo, CA, USA, 23–26 January 1989; Institute of Navigation: Washington, DC, USA, 1989; pp. 169–178. [Google Scholar]
- Zhu, Q.; Xiao, C.; Hu, H.; Liu, Y.; Wu, J. Multi-Sensor based online attitude estimation and stability measurement of articulated heavy vehicles. Sensors 2018, 18, 212. [Google Scholar] [CrossRef]
- Shi, G.; Li, X.; Jiang, Z. An Improved Yaw Estimation Algorithm for Land Vehicles Using MARG Sensors. Sensors 2018, 18, 3251. [Google Scholar] [CrossRef]
- Kim, J.; Lee, C.; Shim, H.; Eun, Y.; Seo, J.H. Detection of Sensor Attack and Resilient State Estimation for Uniformly Observable Nonlinear Systems having Redundant Sensors. IEEE Trans. Autom. Control 2019, 64, 1162–1169. [Google Scholar] [CrossRef]
- Nise, N.S. Control Systems Engineering, (With CD); John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Islam, T.; Islam, M.S.; Shajid-Ul-Mahmud, M.; Hossam-E-Haider, M. Comparison of complementary and Kalman filter based data fusion for attitude heading reference system. AIP Conf. Proc. 2017, 1919, 020002. [Google Scholar] [CrossRef]
- Chang-Siu, E.; Tomizuka, M.; Kong, K. Time-varying complementary filtering for attitude estimation. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2474–2480. [Google Scholar]
- Sazgar, H.; Azadi, S.; Kazemi, R.; Khalaji, A.K. Integrated longitudinal and lateral guidance of vehicles in critical high speed manoeuvres. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 994–1013. [Google Scholar] [CrossRef]
- Saeedi, M.A. A new robust combined control system for improving manoeuvrability, lateral stability and rollover prevention of a vehicle. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019. [Google Scholar] [CrossRef]
- Calibrating and Optimizing mpu6050. Available online: https://wired.chillibasket.com/2015/01/calibrating-mpu6050/ (accessed on 24 December 2019).
- IEEE-SA Standards Board. IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros; IEEE Std 952TM-1997 (R2008); IEEE: New York, NY, USA, 1998. [Google Scholar]
- Allan, D.W. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2008, 57, 140–149. [Google Scholar] [CrossRef]
- Zhu, Q.; Chen, W.; Hu, H.; Wu, X.; Xiao, C.; Song, X. Multi-sensor based attitude prediction for agricultural vehicles. Comput. Electron. Agric. 2019, 156, 24–32. [Google Scholar] [CrossRef]
- García Guzmán, J.; Prieto González, L.; Pajares Redondo, J.; Montalvo Martínez, M.M.; Boada, M.J.L. Real-Time Vehicle Roll Angle Estimation Based on Neural Networks in IoT Low-Cost Devices. Sensors 2018, 18, 2188. [Google Scholar] [CrossRef]
- Won, D.; Ahn, J.; Sung, S.; Heo, M.; Im, S.H.; Lee, Y.J. Performance Improvement of Inertial Navigation System by Using Magnetometer with Vehicle Dynamic Constraints. J. Sens. 2015, 11, 7. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef]
- Wen, X.; Liu, C.; Huang, Z.; Su, S.; Guo, X.; Zuo, Z.; Qu, H. A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation. Sensors 2019, 19, 1340. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, R.; Dabove, P. Performance Assessment of an Ultra Low-Cost Inertial Measurement Unit for Ground Vehicle Navigation. Sensors 2019, 19, 3865. [Google Scholar] [CrossRef] [PubMed]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sno. | Name | Manufacturer | Technology | |
|---|---|---|---|---|
| 1 | TG6000 | KVH (Middle Town, CT, USA) | Fiber Optic | 0.001 |
| 2 | HG1700AG37 | Honeywell (Charlotte, NC, USA) | Ring Laser | 0.002 |
| 3 | VG700MB | Cross Bow (San Jose, CA, USA) | Fiber Optic | 0.006 |
| 4 | HG1700AG68 | Honeywell (Charlotte, NC, USA) | Ring Laser | 0.008 |
| 5 | LandMark10 | Gladiator Tech (Snoqualme, WA, USA) | MEMS | 0.012 |
| 6 | ADIS16355 | Analog Devices (Norwood, MA, USA) | MEMS | 0.033 |
| 7 | MTi-1 | Xsens (Enschede, The Netherlands) | MEMS | 0.01 |
| 8 | L3GD20 | ST Microelectronics (Geneva, Switzerland) | MEMS | 0.03 |
| 9 | MPU-6050 | TDK-InvenSense (San Jose, CA, USA) | MEMS | 0.005 |
| Input | Rms Error Deg (SMO) | Rms Error Deg (Luenberger) | Maximum Error (SMO) | Maximum Error (Luenberger) |
|---|---|---|---|---|
| Step Input | 0.0906 | 0.2127 | 0.2223 | 0.3126 |
| Sinusoidal Input | 0.1537 | 0.4471 | 0.2936 | 0.6742 |
| ISO Fish Hook Maneuver | 0.0872 | 0.1458 | 0.1415 | 0.2132 |
| ISO Double Lane Change | 0.0898 | 0.1823 | 0.2074 | 0.2487 |
| Author | Estimation Parameter | Platform | Estimator | Computation Cost | Error Max (RMSE) (deg) |
|---|---|---|---|---|---|
| Qingyuan Zhu et al. [38] | Roll | Prototype Vehicle | GA | 100 ms | 1.8 (Roll) |
| Pitch | BP NN | 2.1 (Pitch) | |||
| Hamad Ahmed et al. [24] | Roll | Standard Vehicle | KF | 20–25 ms | 0.1 (Roll) |
| Pitch | 0.13 (Pitch) | ||||
| Yaw | 0.01 (Yaw) | ||||
| Javier Garcia Guzman et al. [39] | Roll | Standard Vehicle | KF | 14.2 ms | 0.76 (Roll) |
| Pitch | UKF | 6.76 ms | 0.63 (Pitch) | ||
| Daehee Won et al. [40] | Roll | Standard Vehicle | EKF | 21.4 ms | 0.28 (Roll) |
| Pitch | 0.55 (Pitch) | ||||
| RobertoG.Valenti et al. [41] | Roll | Standard Vehicle | Pseudo | 1.42 μs | 1.32 (Roll) |
| Pitch | Madwick | 1.19 (Pitch) | |||
| Yaw | EKF | ||||
| XudongWen et al. [42] | Roll | UAV | NCF | 41 ms | 1.16 (Roll) |
| Pitch | DNCF | 0.50 (Pitch) | |||
| Yaw | - | - | |||
| Rodrigo Gonzalez et al. [43] | Roll | Standard Vehicle | KF | 0.2 s | 0.362 (Roll) |
| Pitch | 0.339 (Pitch) | ||||
| Yaw | 1.839 (Yaw) | ||||
| Proposed scheme | Roll | Standard Vehicle | CF | 3.2 ms | 0.6738 (Roll) |
| Pitch | 0.7280 (Pitch) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal Mazhar, M.; Khan, M.J.; Bhatti, A.I.; Naseer, N. A Novel Roll and Pitch Estimation Approach for a Ground Vehicle Stability Improvement Using a Low Cost IMU. Sensors 2020, 20, 340. https://doi.org/10.3390/s20020340
Kamal Mazhar M, Khan MJ, Bhatti AI, Naseer N. A Novel Roll and Pitch Estimation Approach for a Ground Vehicle Stability Improvement Using a Low Cost IMU. Sensors. 2020; 20(2):340. https://doi.org/10.3390/s20020340
Chicago/Turabian StyleKamal Mazhar, Malik, Muhammad Jawad Khan, Aamer Iqbal Bhatti, and Noman Naseer. 2020. "A Novel Roll and Pitch Estimation Approach for a Ground Vehicle Stability Improvement Using a Low Cost IMU" Sensors 20, no. 2: 340. https://doi.org/10.3390/s20020340
APA StyleKamal Mazhar, M., Khan, M. J., Bhatti, A. I., & Naseer, N. (2020). A Novel Roll and Pitch Estimation Approach for a Ground Vehicle Stability Improvement Using a Low Cost IMU. Sensors, 20(2), 340. https://doi.org/10.3390/s20020340