Hyperspectral Imaging Tera Hertz System for Soil Analysis: Initial Results


Abstract
1. Introduction
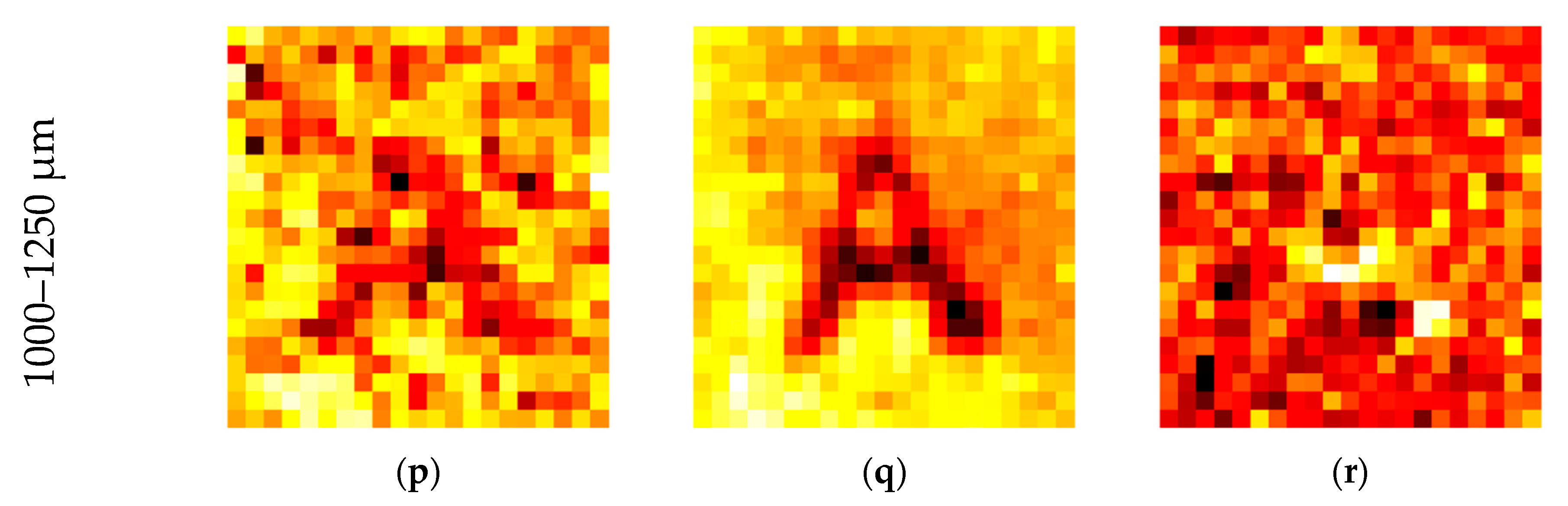
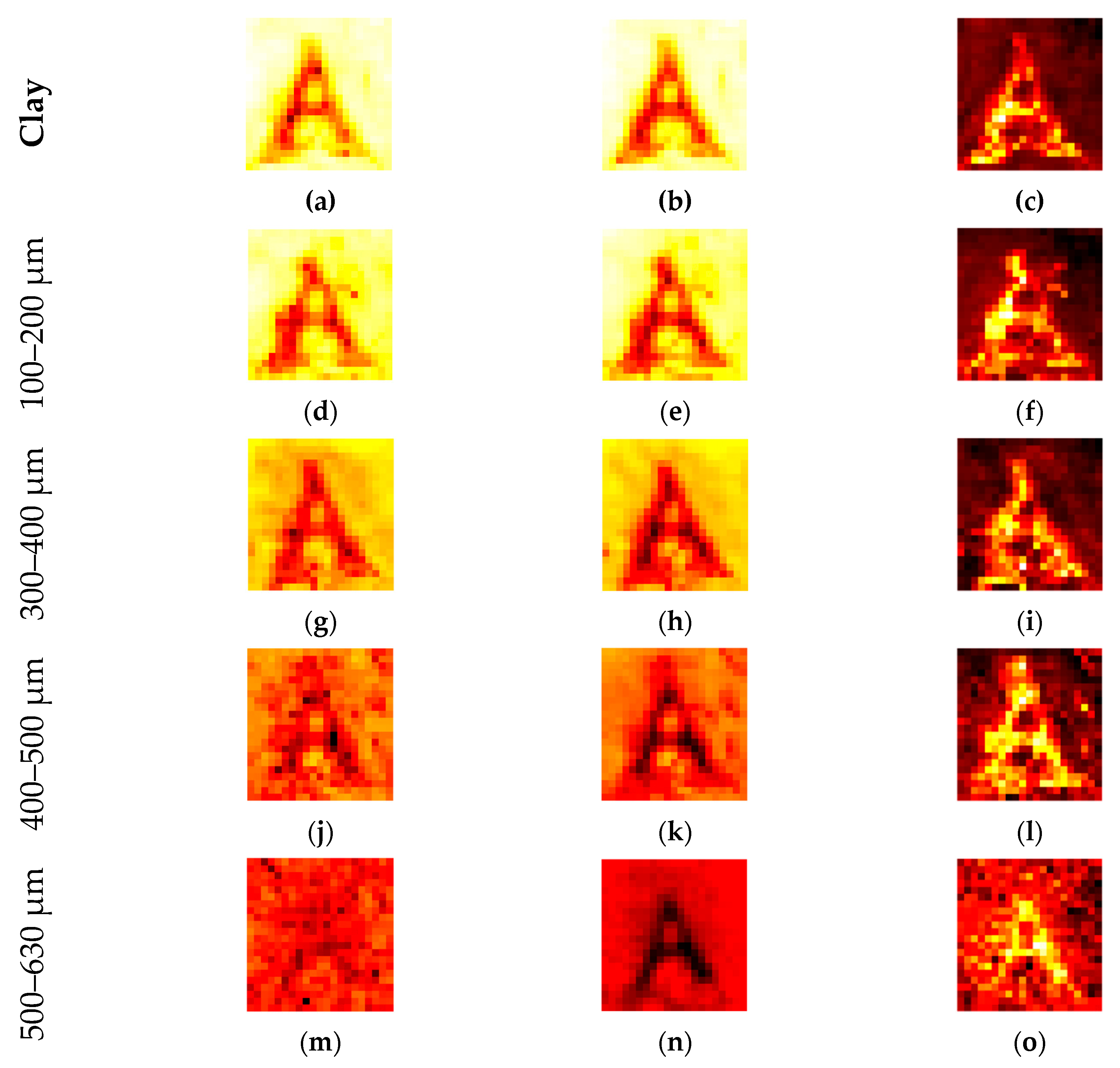
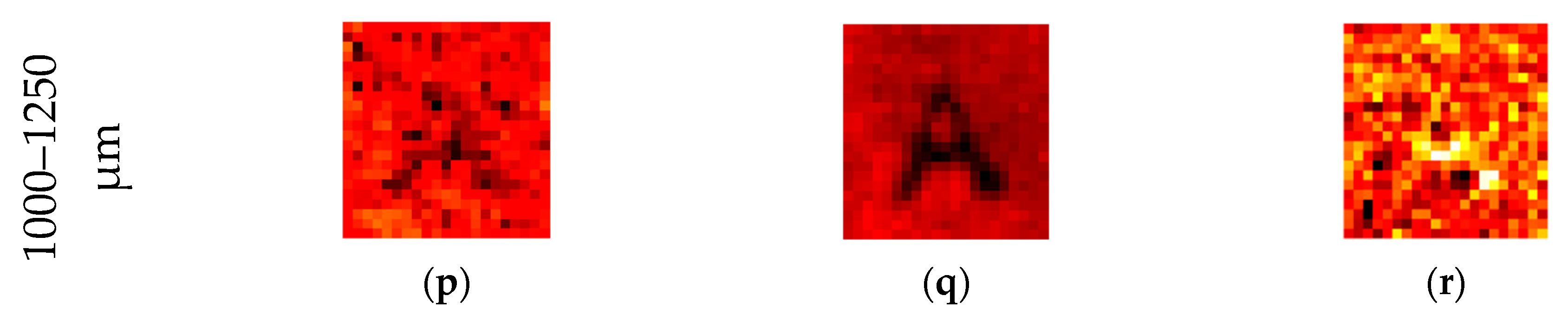
- Can the effect of scattering on image quality be demonstrated by hyperspectral imaging?
- Can the imaging localize artifacts or measurement errors?
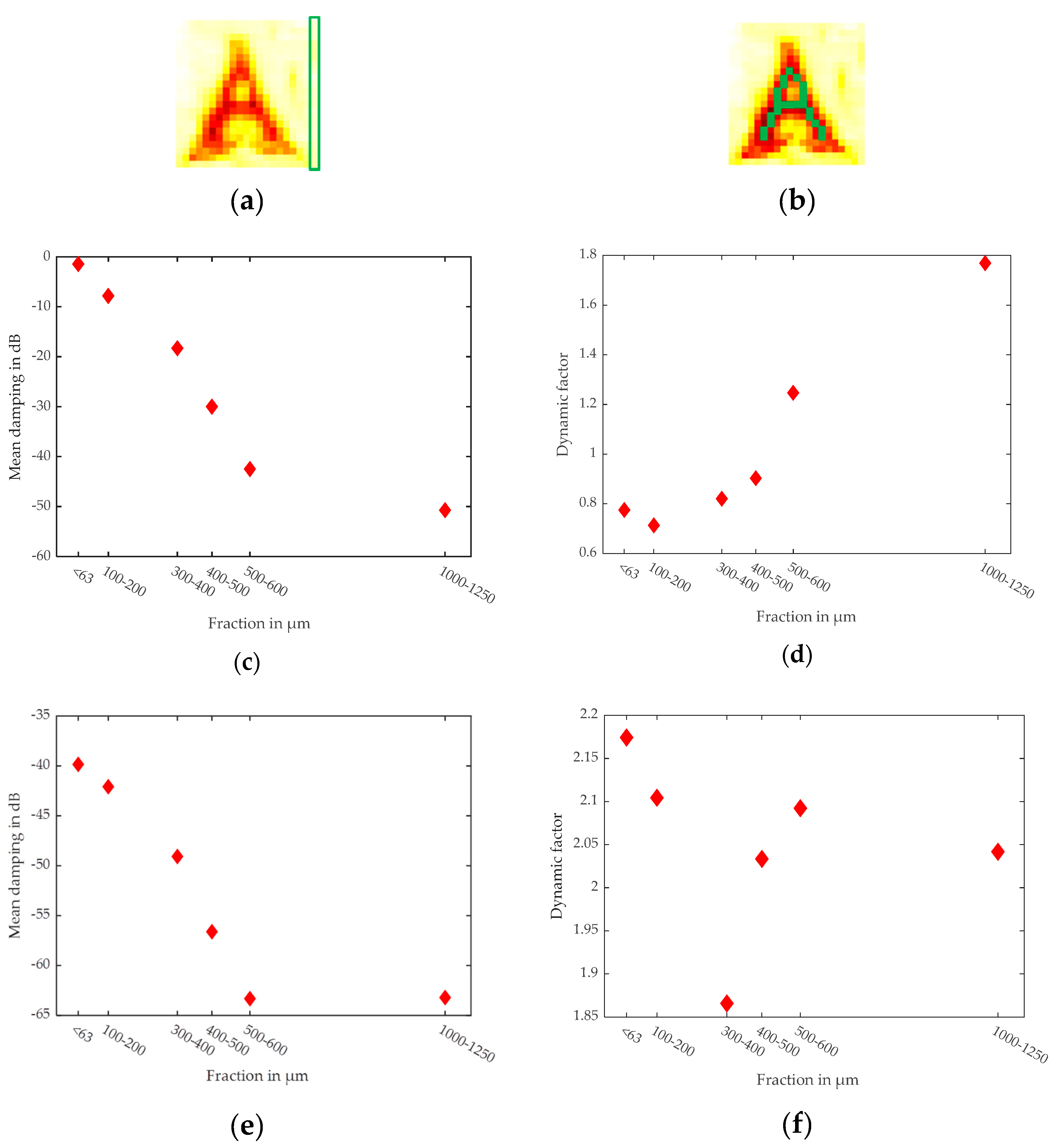
- How can the imaging identify homogenous sample regions for statistical comparisons?
2. Materials and Methods
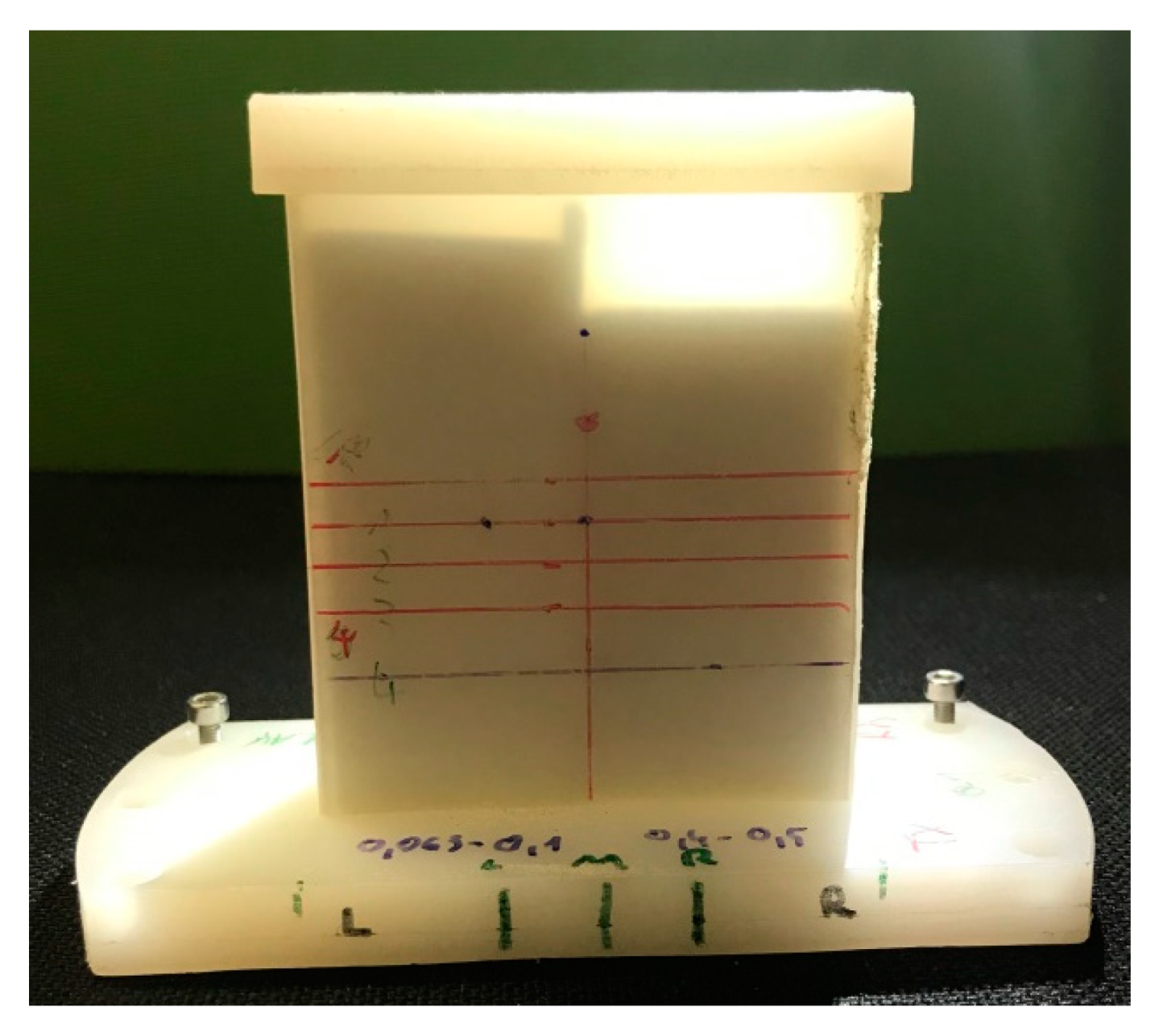
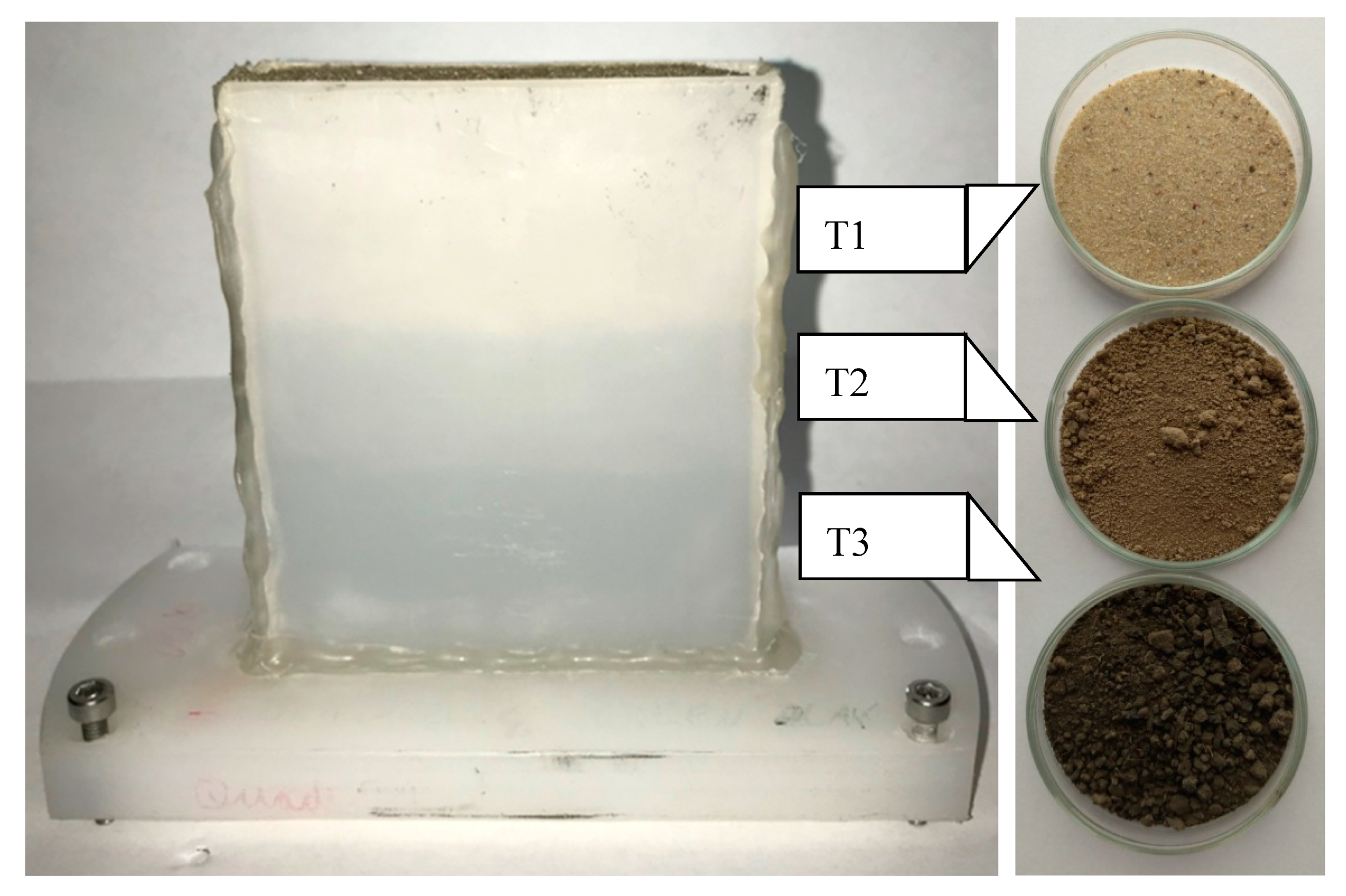
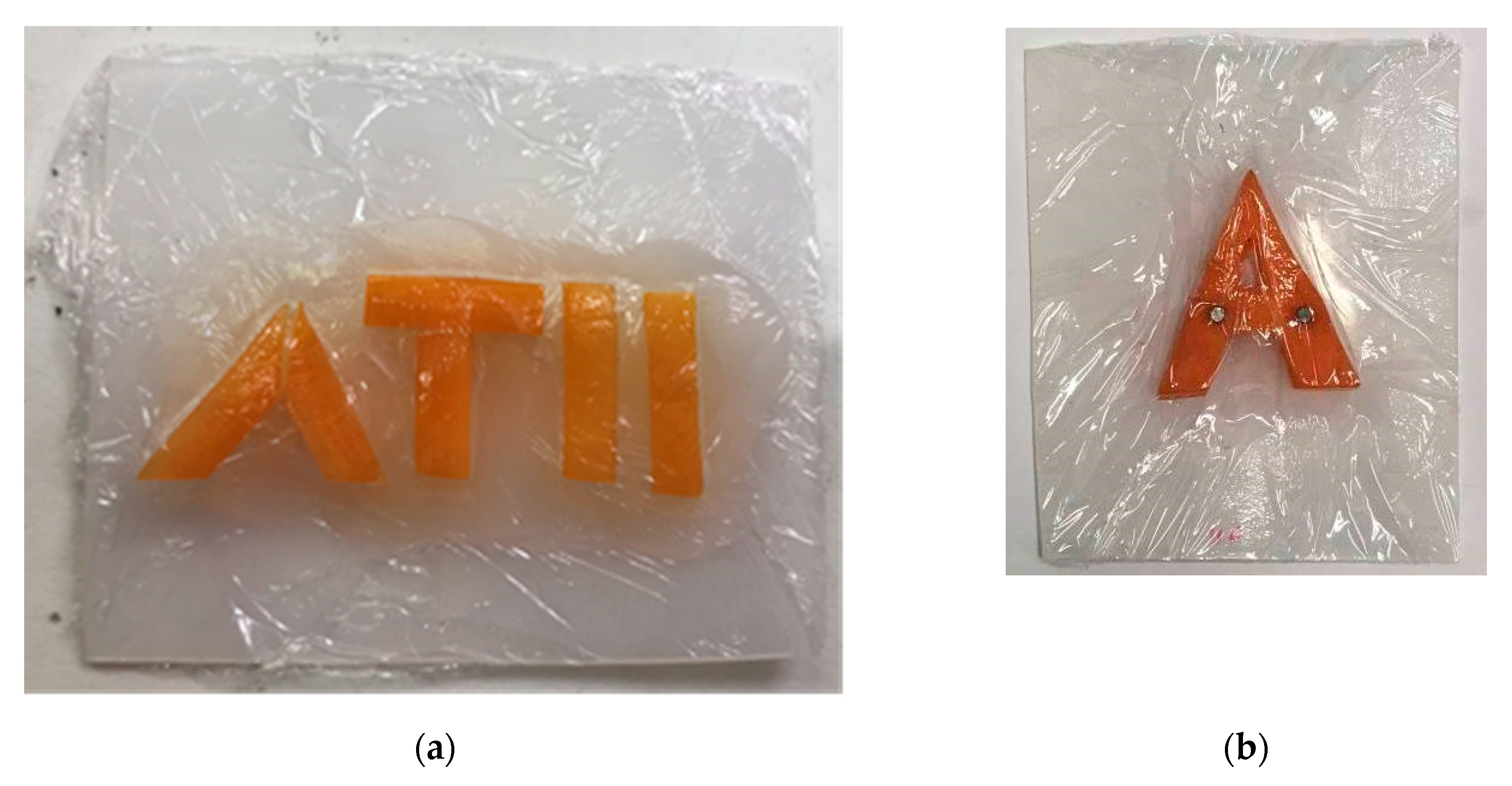
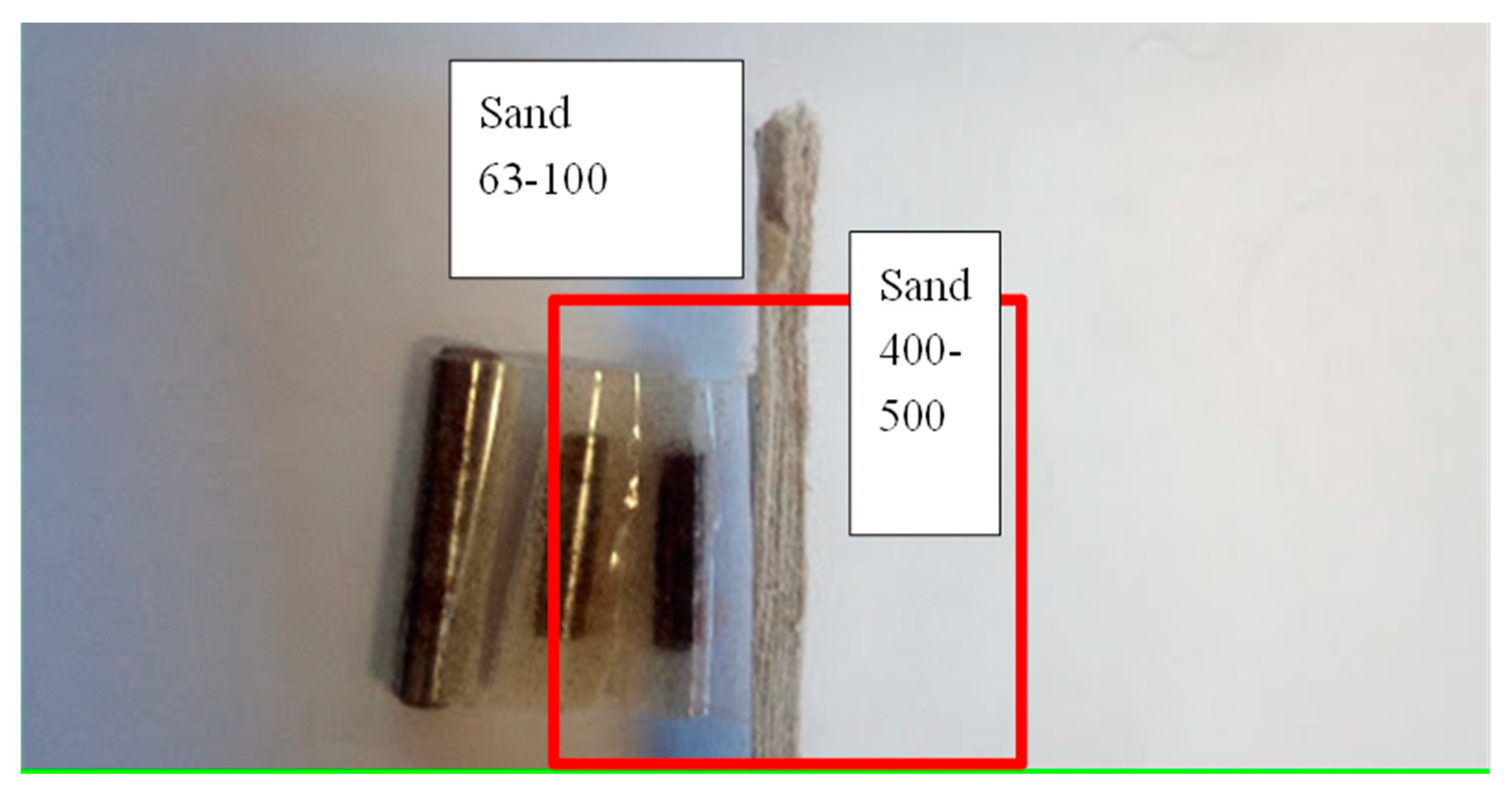
2.1. Soil Samples and Holders
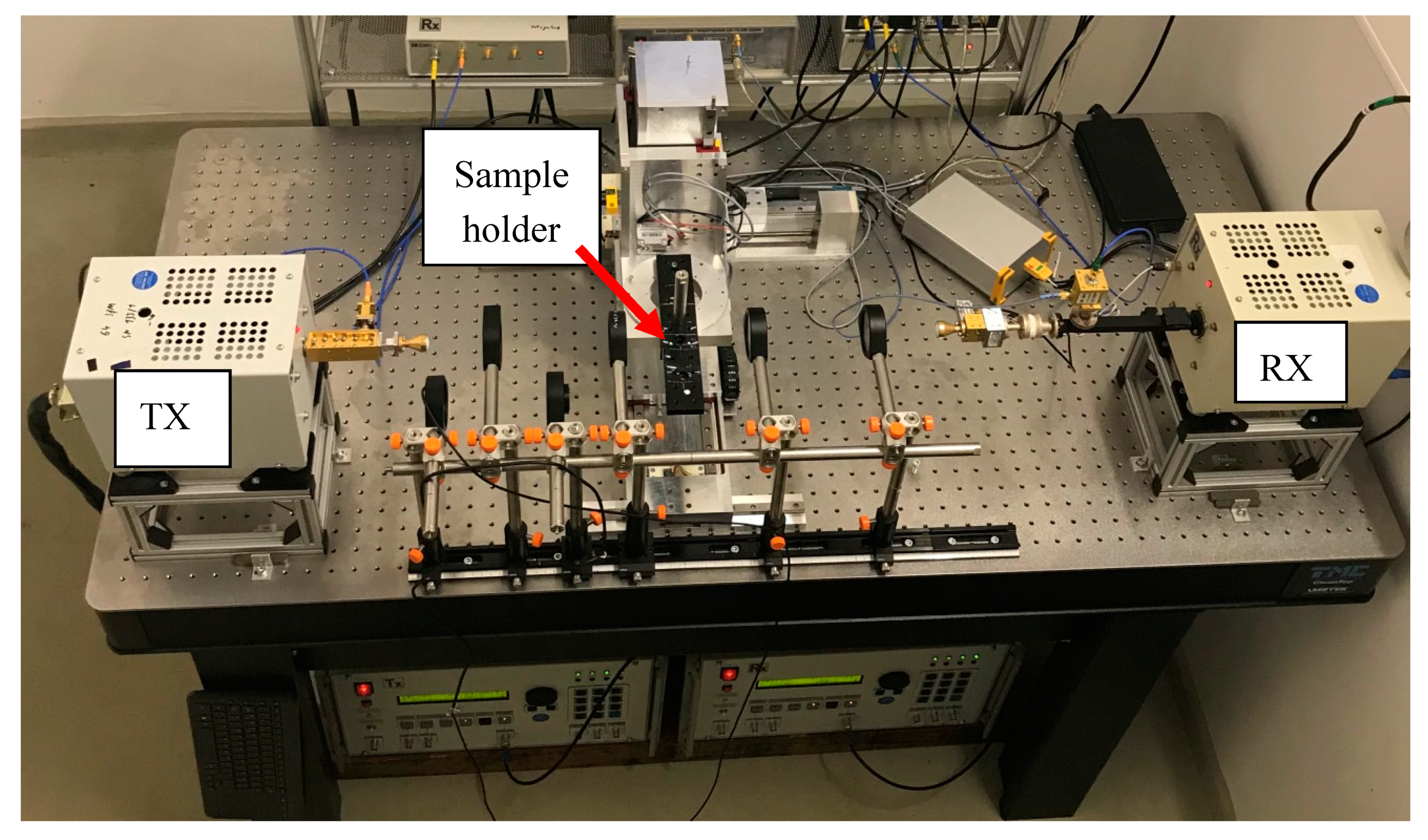
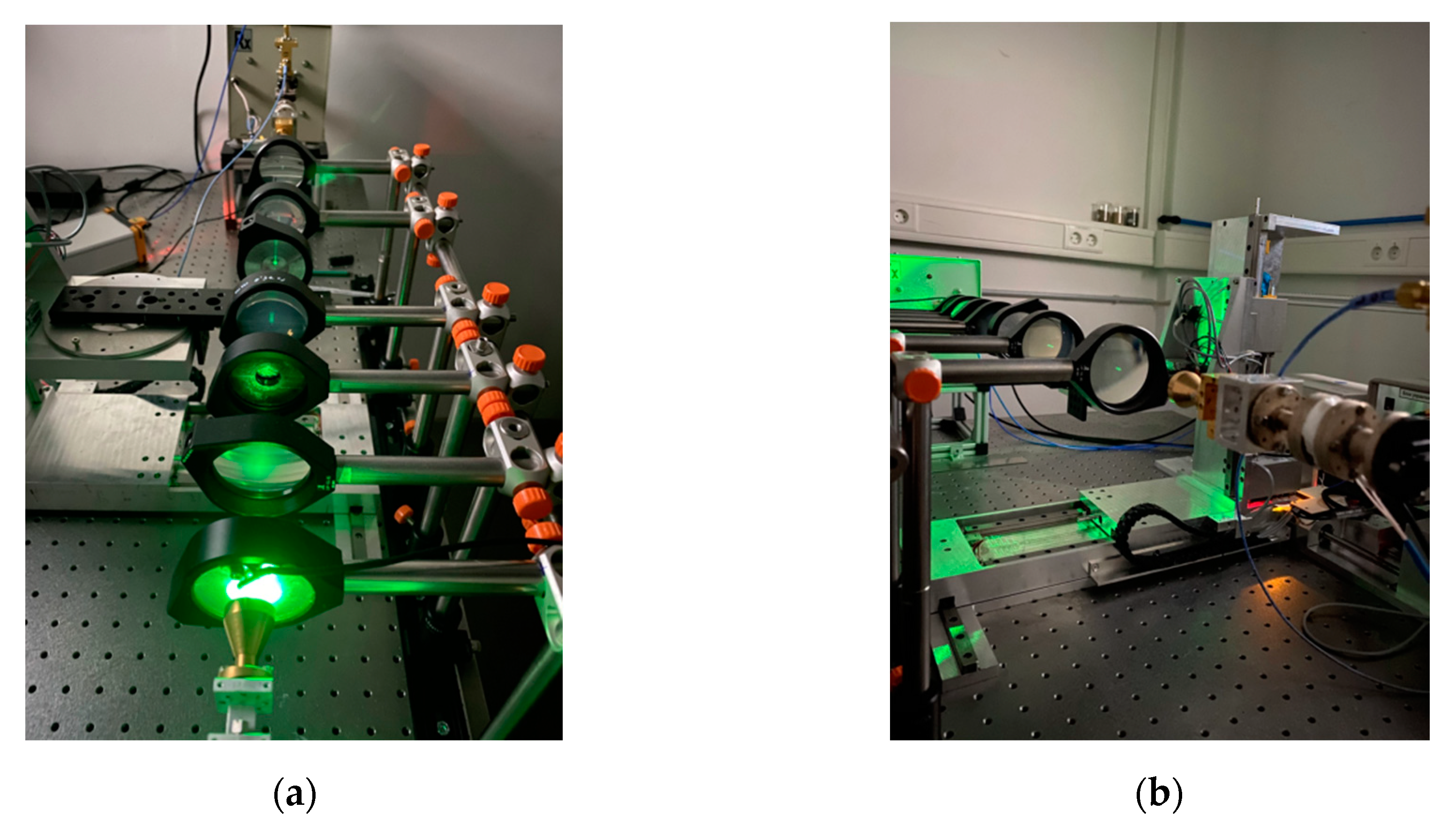
2.2. THz Spectrometer
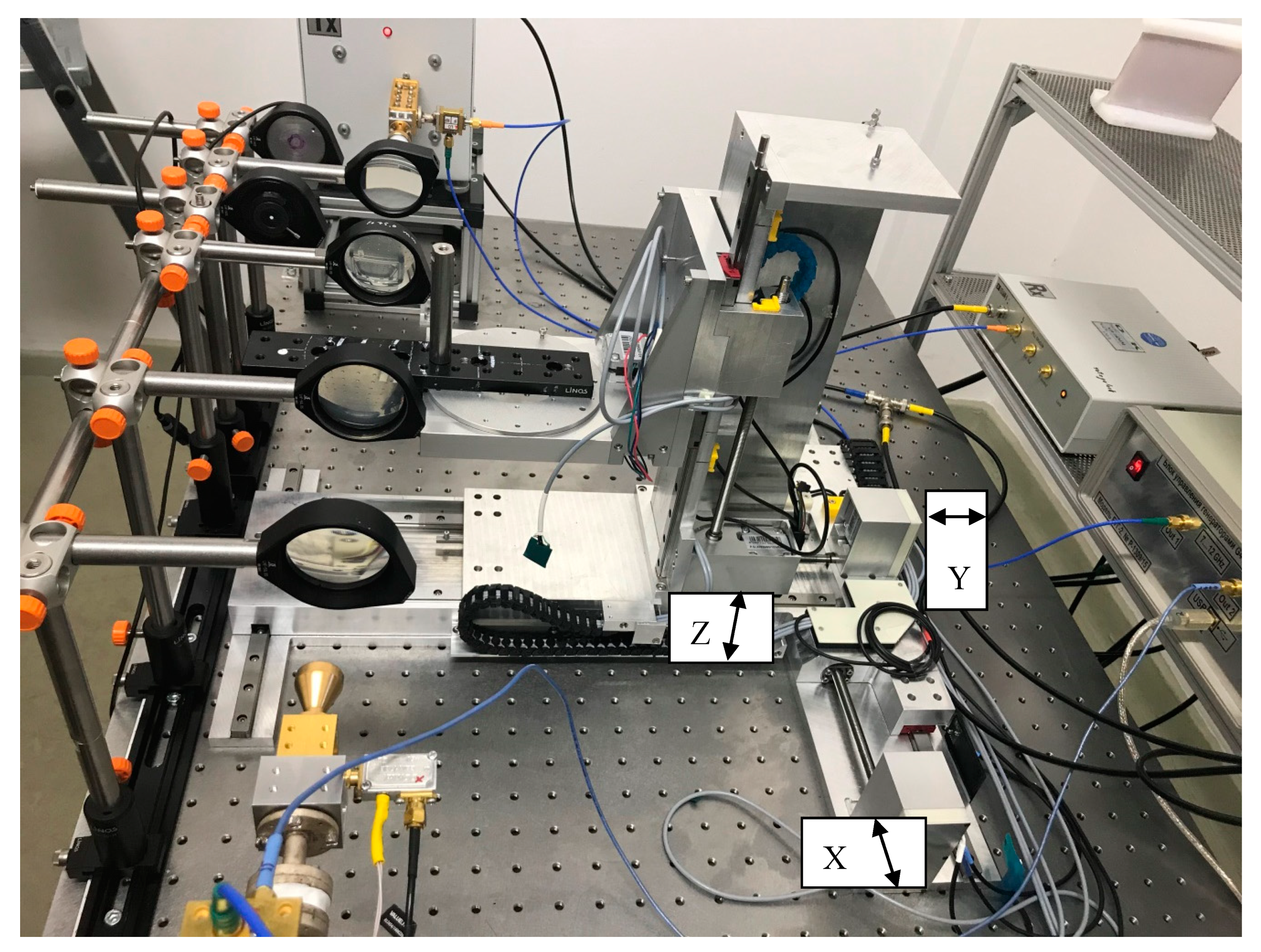
2.3. Sample Positioning
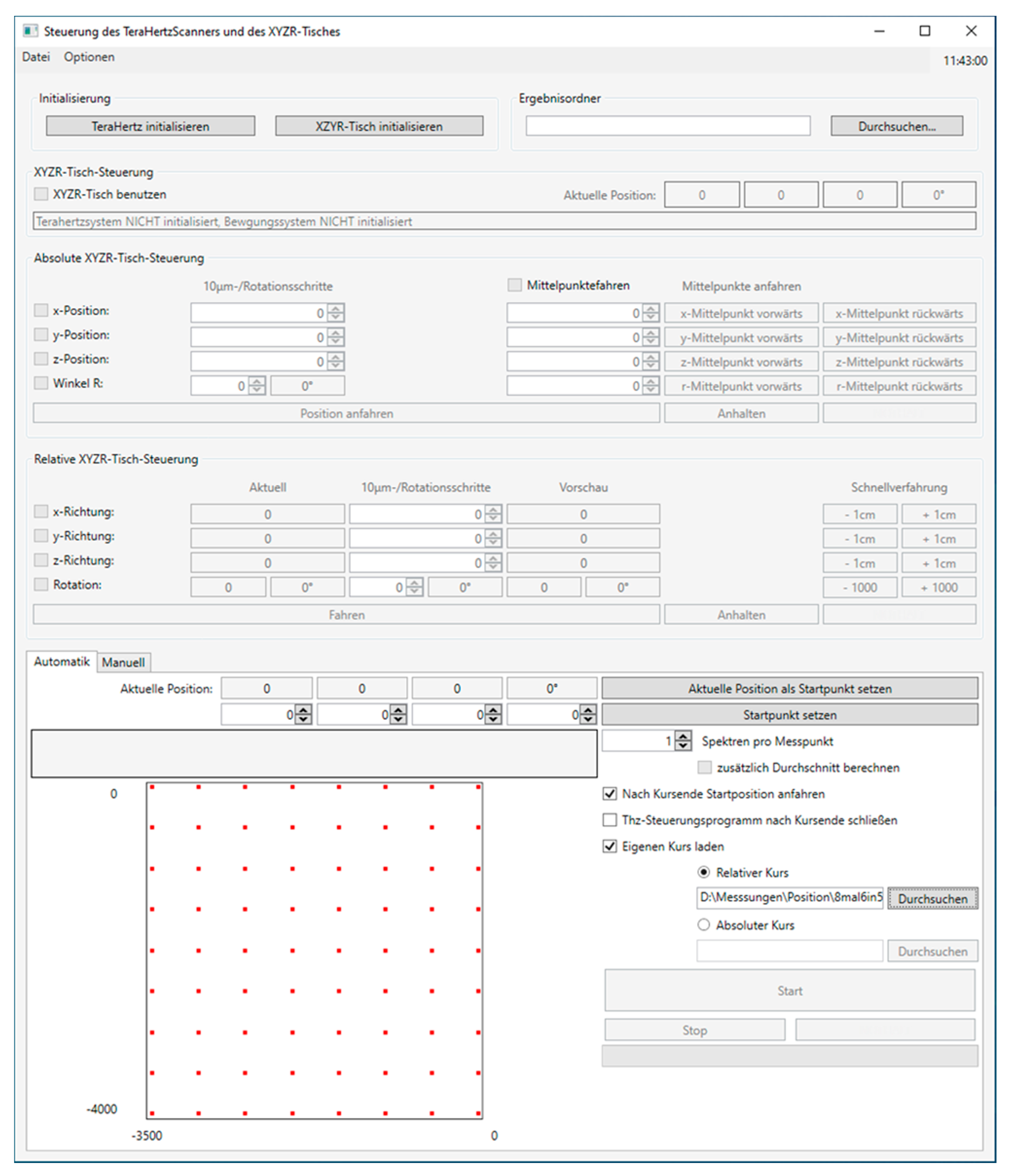
2.4. Operating Software
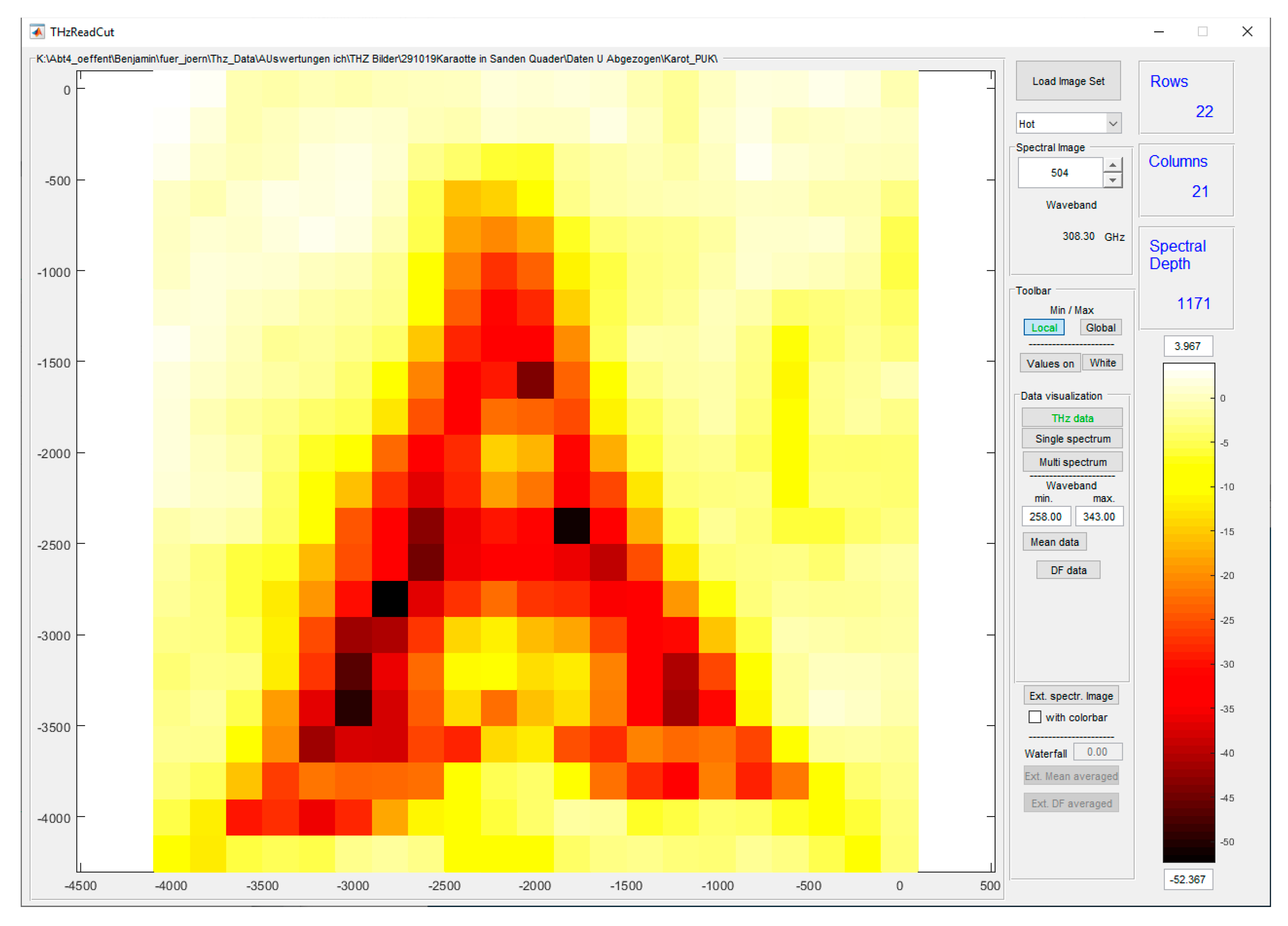
2.5. Data Analysis
2.6. Dynamic Factor
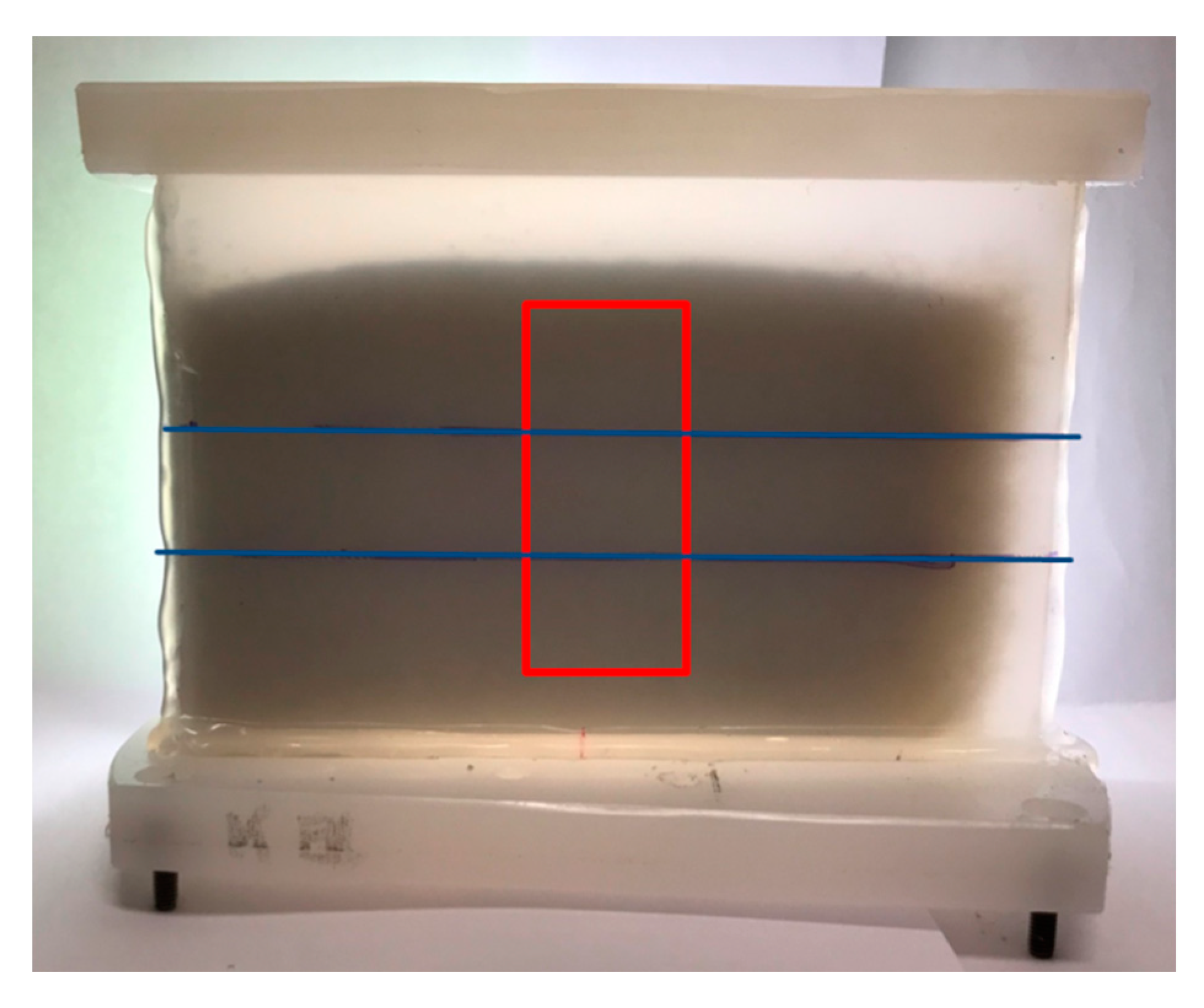
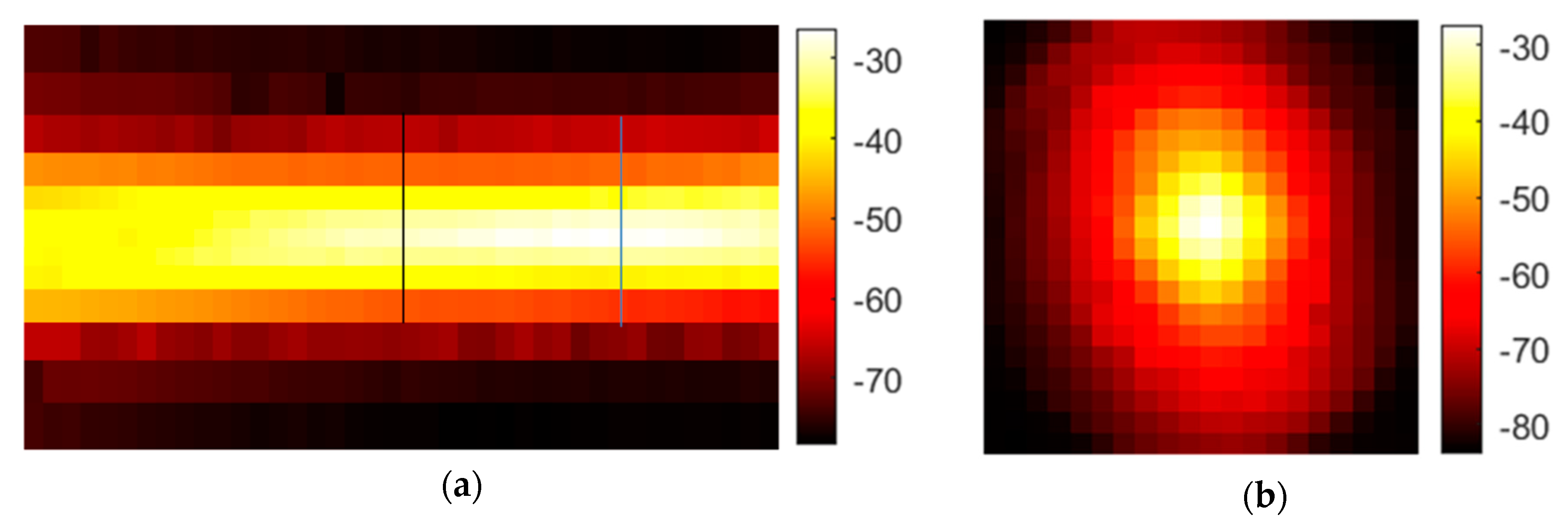
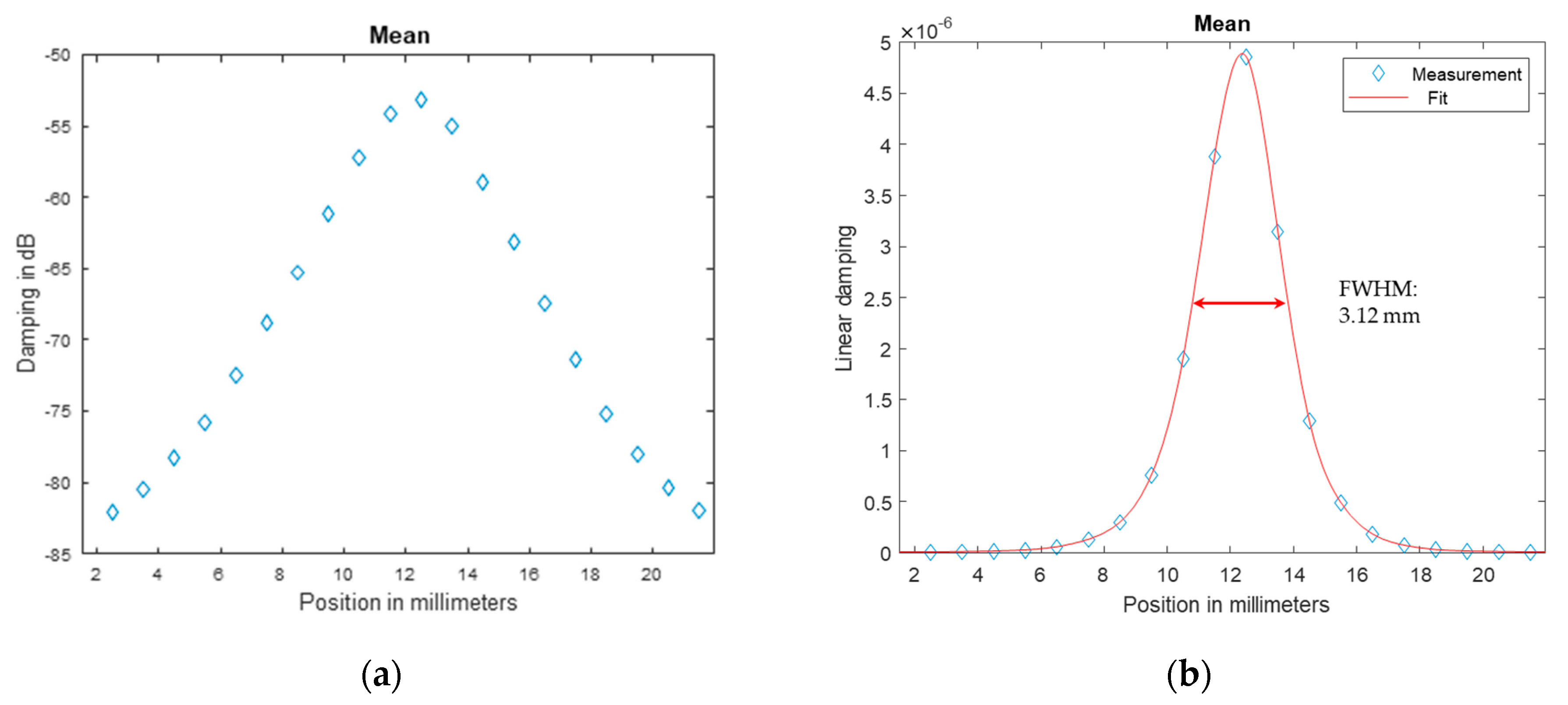
2.7. Spatial Resolution
3. Results
3.1. Characterization of the Setup
3.2. Simultaneous Measurement of Multiple Samples
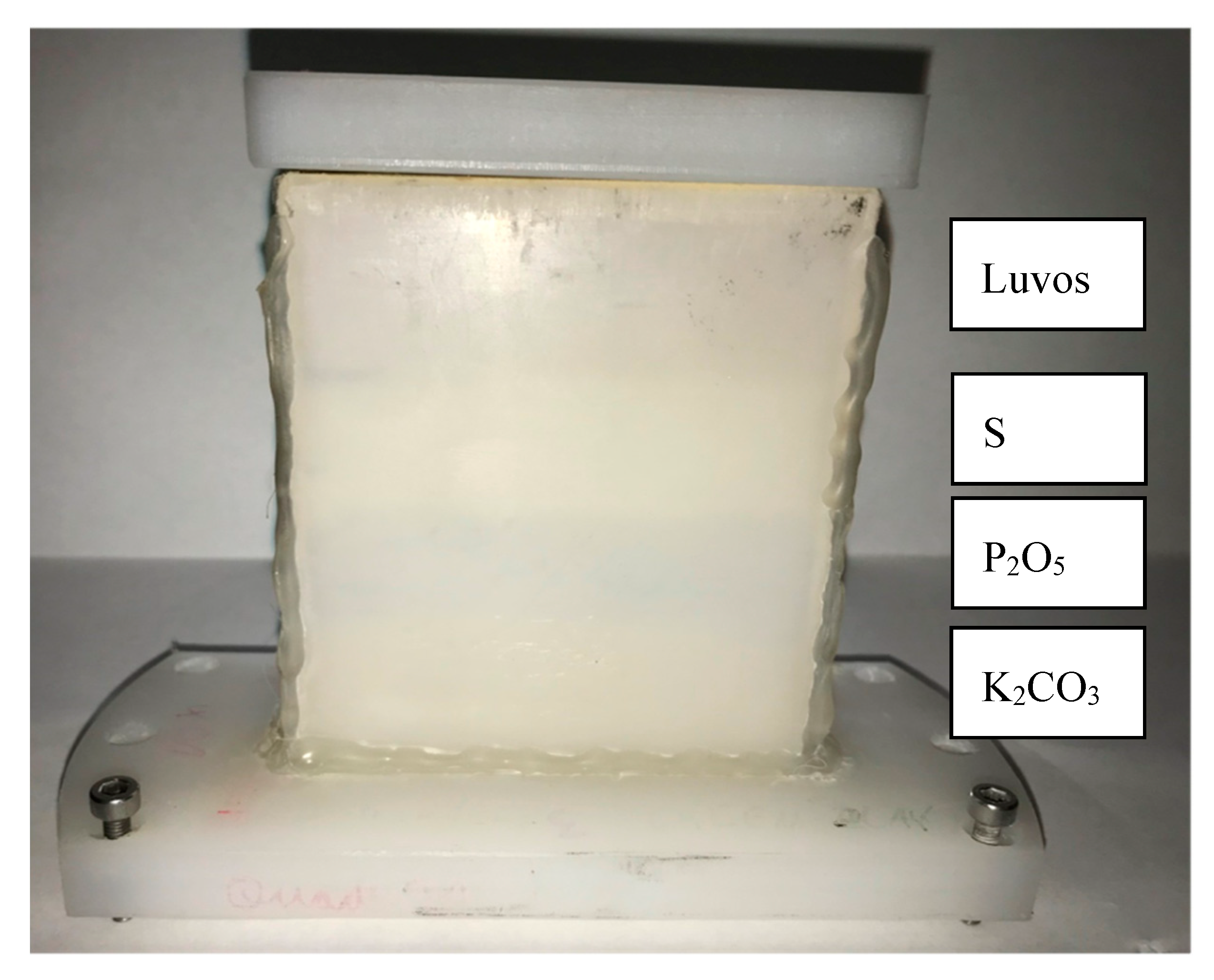
3.3. Measurement of Buried Objects
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Vis-NIR | Visible to Near-Infrared |
| DF | Dynamic factor |
| HDPE | high-density polyethylene |
| THz | Terahertz |
| GHz | Gigahertz |
| TX | Transmitter |
| RX | Receiver |
| GUI | Graphical user interface |
| CW | Continuous wave |
| PC | Personal computer |
| FWHM | Full width half maximum |
References
- Riebe, D.; Erler, A.; Brinkmann, P.; Beitz, T.; Löhmannsröben, H.-G.; Gebbers, R. Comparison of Calibration Approaches in Laser-Induced Breakdown Spectroscopy for Proximal Soil Sensing in Precision Agriculture. Sensors 2019, 19, 5244. [Google Scholar] [CrossRef] [PubMed]
- Rossel, R.V.; Adamchuk, V.; Sudduth, K.; McKenzie, N.; Lobsey, C. Proximal Soil Sensing: An Effective Approach for Soil Measurements in Space and Time. Adv. Agron. 2011, 113, 243–291. [Google Scholar] [CrossRef]
- Lewis, A.R. Invited Review Terahertz Transmission, Scattering, Reflection, and Absorption—The Interaction of THz Radiation with Soils. J. InfraredMillim. Terahertz Waves 2017, 38, 799–807. [Google Scholar] [CrossRef]
- Jepsen, P.U.; Cooke, D.G.; Koch, M. Terahertz spectroscopy and imaging—Modern techniques and applications. Laser Photon. Rev. 2011, 5, 124–166. [Google Scholar] [CrossRef]
- Mathanker, S.K.; Weckler, P.R.; Wang, N. Terahertz (THz) Applications in Food and Agriculture: A Review. ASABE 2013, 56, 1213–1226. [Google Scholar]
- Chi, T.; Huang, M.-Y.; Li, S.; Wang, H. 17.7 A packaged 90-to-300GHz transmitter and 115-to-325GHz coherent receiver in CMOS for full-band continuous-wave mm-wave hyperspectral imaging. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 304–305. [Google Scholar]
- Qin, J.; Ying, Y.; Xie, L. The Detection of Agricultural Products and Food Using Terahertz Spectroscopy: A Review. Appl. Spectrosc. Rev. 2013, 48, 439–457. [Google Scholar] [CrossRef]
- Dworak, V.; Mahns, B.; Selbeck, J.; Gebbers, R.; Weltzien, C. Terahertz Spectroscopy for Proximal Soil Sensing: An Approach to Particle Size Analysis. Sensors 2017, 17, 2387. [Google Scholar] [CrossRef]
- Lee, G.-J.; Kim, S.; Kwon, T.-H. Effect of Moisture Content and Particle Size on Extinction Coefficients of Soils Using Terahertz Time-Domain Spectroscopy. IEEE Trans. Terahertz Sci. Technol. 2017, 7, 529–535. [Google Scholar] [CrossRef]
- Mie, G. Beiträge zur Optik trüber Medien, speziell kolloidaler Metallösungen. Ann. Der Phys. 1908, 330, 377–445. [Google Scholar] [CrossRef]
- Bohren, C.F.; Huffman, D.R. Absorption and Scattering of Light by Small Particles; Wiley & Sons: Hoboken, NJ, USA, 1998; p. 530. [Google Scholar]
- Bao, Y.; Mi, C.; Wu, N.; Liu, F.; He, Y. Rapid Classification of Wheat Grain Varieties Using Hyperspectral Imaging and Chemometrics. Appl. Sci. 2019, 9, 4119. [Google Scholar] [CrossRef]
- Wei, L.; Zhang, Y.; Yuan, Z.; Wang, Z.; Yin, F.; Cao, L. Development of Visible/Near-Infrared Hyperspectral Imaging for the Prediction of Total Arsenic Concentration in Soil. Appl. Sci. 2020, 10, 2941. [Google Scholar] [CrossRef]
- Lee, D.; Lohumi, S.; Cho, B.-K.; Lee, S.H.; Jung, H.M. Determination of Drying Patterns of Radish Slabs under Different Drying Methods Using Hyperspectral Imaging Coupled with Multivariate Analysis. Foods 2020, 9, 484. [Google Scholar] [CrossRef] [PubMed]
- Bai, X.; Xiao, Q.; Zhou, L.; Tang, Y.; He, Y. Detection of Sulfite Dioxide Residue on the Surface of Fresh-Cut Potato Slices Using Near-Infrared Hyperspectral Imaging System and Portable Near-Infrared Spectrometer. Molecules 2020, 25, 1651. [Google Scholar] [CrossRef] [PubMed]
- Bauriegel, E.; Giebel, A.; Geyer, M.; Schmidt, U.; Herppich, W.B. Early detection of Fusarium infection in wheat using hyper-spectral imaging. Comput. Electron. Agric. 2011, 75, 304–312. [Google Scholar] [CrossRef]
- Le Moan, S.; Cariou, C. Minimax Bridgeness-Based Clustering for Hyperspectral Data. Remote Sens. 2020, 12, 1162. [Google Scholar] [CrossRef]
- Nigon, T.J.; Yang, C.; Paiao, G.D.; Mulla, D.J.; Knight, J.F.; Fernández, F.G. Prediction of Early Season Nitrogen Uptake in Maize Using High-Resolution Aerial Hyperspectral Imagery. Remote Sens. 2020, 12, 1234. [Google Scholar] [CrossRef]
- Li, H.; Jia, S.; Le, Z. Quantitative Analysis of Soil Total Nitrogen Using Hyperspectral Imaging Technology with Extreme Learning Machine. Sensors 2019, 19, 4355. [Google Scholar] [CrossRef]
- Ortega, S.; Halicek, M.; Fabelo, H.; Camacho, R.; Plaza, M.D.L.L.; Godtliebsen, F.; Callicó, G.M.; Fei, B. Hyperspectral Imaging for the Detection of Glioblastoma Tumor Cells in H&E Slides Using Convolutional Neural Networks. Sensors 2020, 20, 1911. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, Q.; Lin, F.; Yin, X.; Gu, C.; Qiao, H. Development and Evaluation of a New Spectral Disease Index to Detect Wheat Fusarium Head Blight Using Hyperspectral Imaging. Sensors 2020, 20, 2260. [Google Scholar] [CrossRef]
- Weng, H.; Tian, Y.; Wu, N.; Li, X.; Yang, B.; Huang, Y.; Ye, D.; Wu, R. Development of a Low-Cost Narrow Band Multispectral Imaging System Coupled with Chemometric Analysis for Rapid Detection of Rice False Smut in Rice Seed. Sensors 2020, 20, 1209. [Google Scholar] [CrossRef]
- Lim, H.-H.; Cheon, E.; Lee, D.-H.; Jeon, J.-S.; Lee, S.-R. Classification of Granite Soils and Prediction of Soil Water Content Using Hyperspectral Visible and Near-Infrared Imaging. Sensors 2020, 20, 1611. [Google Scholar] [CrossRef] [PubMed]
- Abina, A.; Puc, U.; Jeglič, A.; Zidanšek, A. Applications of Terahertz Spectroscopy in the Field of Construction and Building Materials. Appl. Spectrosc. Rev. 2015, 50, 279–303. [Google Scholar] [CrossRef]
- Egel, A.; Pattelli, L.; Mazzamuto, G.; Wiersma, D.S.; Lemmer, U. CELES: CUDA-accelerated simulation of electromagnetic scattering by large ensembles of spheres. J. Quant. Spectrosc. Radiat. Transf. 2017, 199, 103–110. [Google Scholar] [CrossRef]
- Du Bosq, T.W.; Peale, R.E.; Boreman, G.D. Terahertz/Millimeter Wave Characterizations of Soils for Mine Detection: Transmission and Scattering. Int. J. Infrared Millim. Waves 2008, 29, 769–781. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
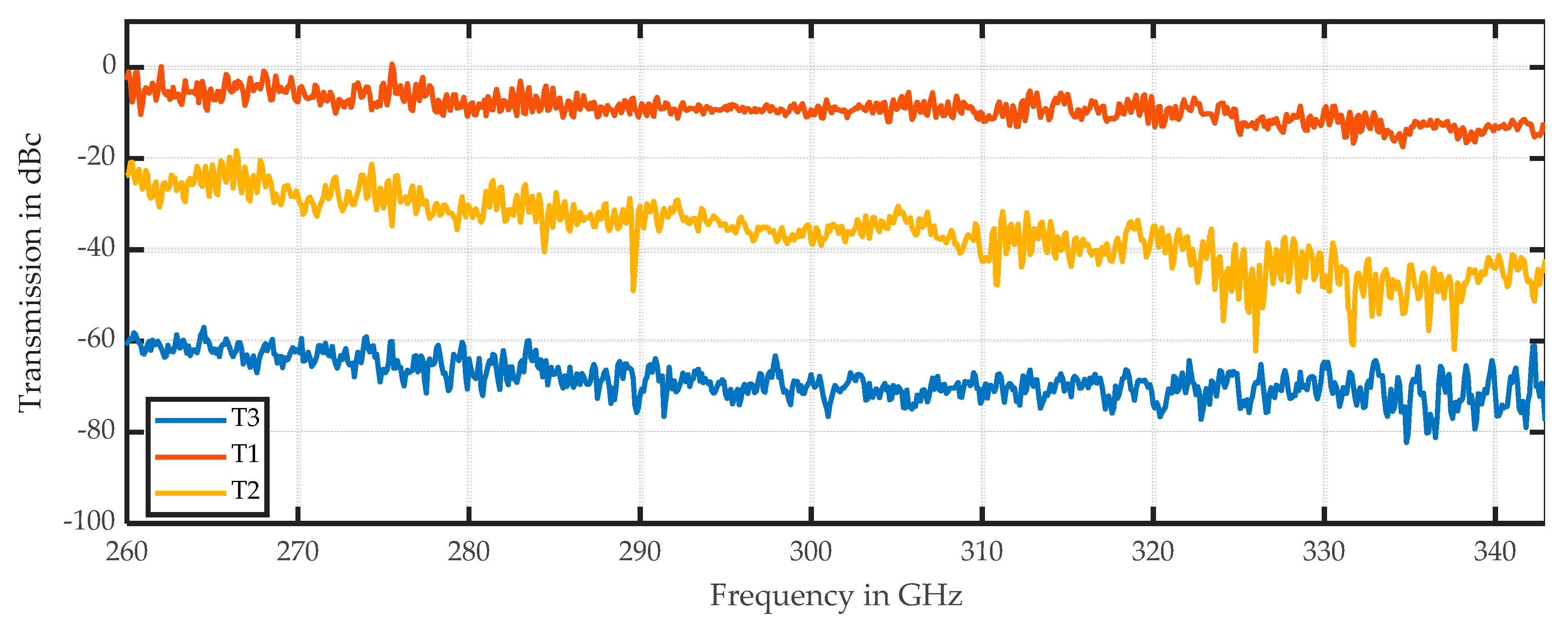
| Sample Name | DM105 | OM | C | N | S |
|---|---|---|---|---|---|
| % | % | % | % | % | |
| T1 | 99.97 | 0.238 | 0.010 | 0.001 | 0.006 |
| T2 | 99.75 | 1.554 | 0.451 | 0.017 | 0.030 |
| T3 | 93.50 | 30.50 | 15.50 | 0.142 | 3.61 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dworak, V.; Mahns, B.; Selbeck, J.; Gebbers, R.; Weltzien, C. Hyperspectral Imaging Tera Hertz System for Soil Analysis: Initial Results. Sensors 2020, 20, 5660. https://doi.org/10.3390/s20195660
Dworak V, Mahns B, Selbeck J, Gebbers R, Weltzien C. Hyperspectral Imaging Tera Hertz System for Soil Analysis: Initial Results. Sensors. 2020; 20(19):5660. https://doi.org/10.3390/s20195660
Chicago/Turabian StyleDworak, Volker, Benjamin Mahns, Jörn Selbeck, Robin Gebbers, and Cornelia Weltzien. 2020. "Hyperspectral Imaging Tera Hertz System for Soil Analysis: Initial Results" Sensors 20, no. 19: 5660. https://doi.org/10.3390/s20195660
APA StyleDworak, V., Mahns, B., Selbeck, J., Gebbers, R., & Weltzien, C. (2020). Hyperspectral Imaging Tera Hertz System for Soil Analysis: Initial Results. Sensors, 20(19), 5660. https://doi.org/10.3390/s20195660