A Comprehensive Study on Light Signals of Opportunity for Subdecimetre Unmodulated Visible Light Positioning



Abstract
1. Introduction
1.1. Problem Statement
1.2. Paper Content
- A measurement-based study towards the manifestation of a characteristic frequency with 5 different LED light and LED driver combinations.
- An experimental positioning performance comparison between uVLP and (regular) VLP positioning, for different demodulation and positioning procedures.
- The introduction of more robust versions of the model-based fingerprinting approach of [22].
- Simulations, matching and extending the experimental results, to investigate the feasibility of uVLP in environments with higher ceilings.
2. Materials and Methods
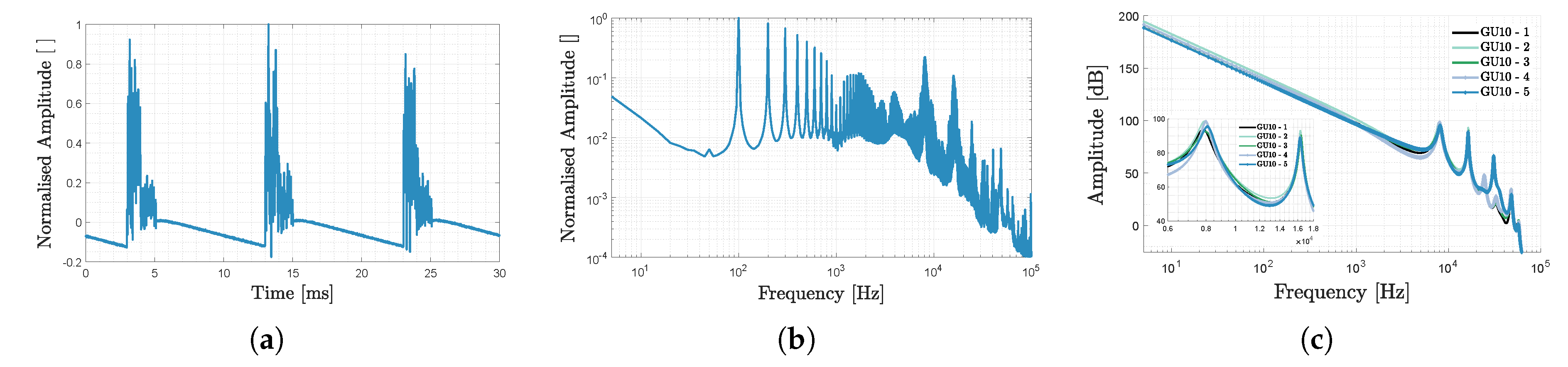
2.1. Characteristic Frequency
2.2. Measuring the Characteristic Frequency
2.2.1. Single-Phase Bridge Rectifier-Based LED Topology
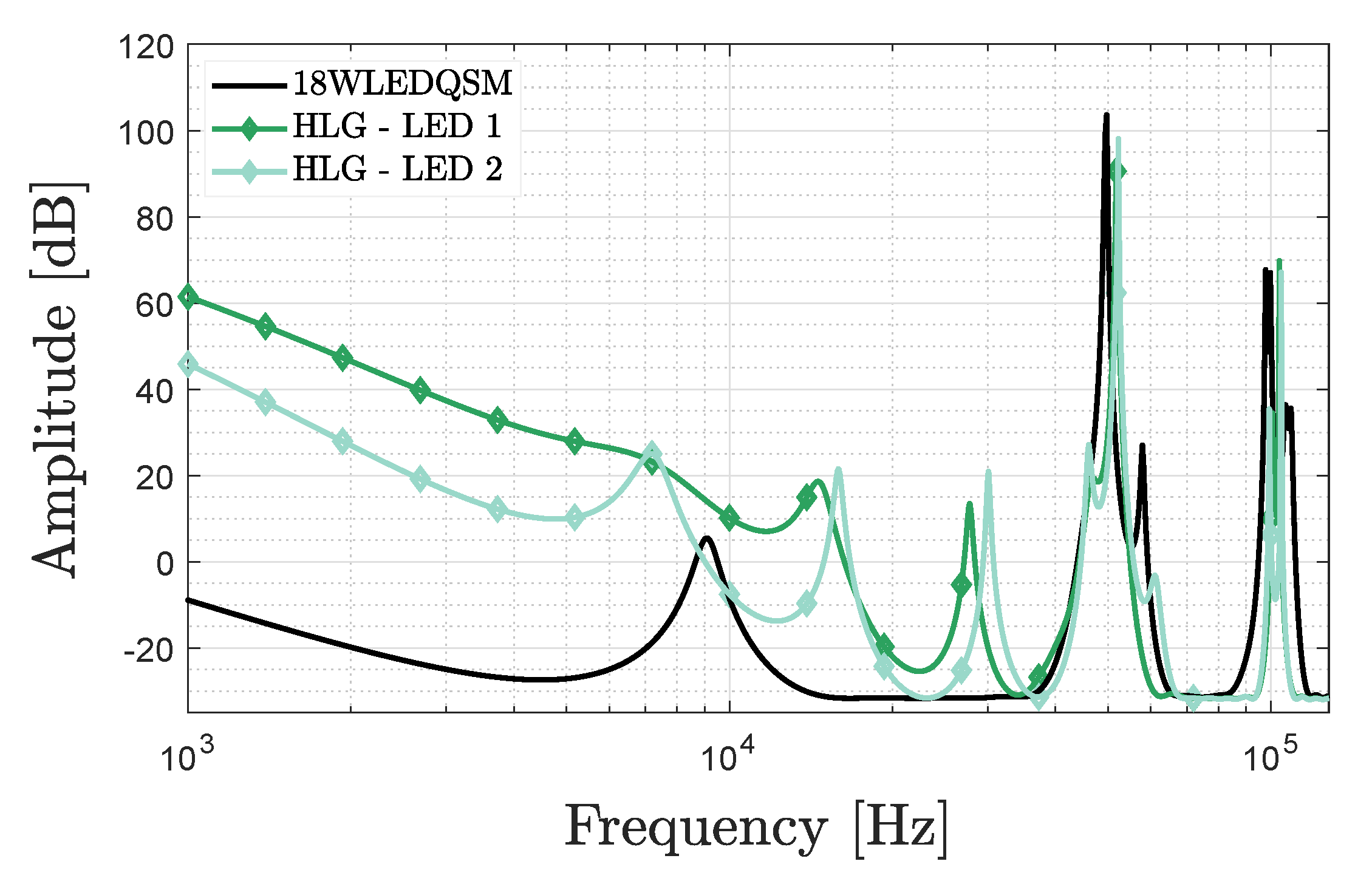
2.2.2. 18wledqsm LED Panel
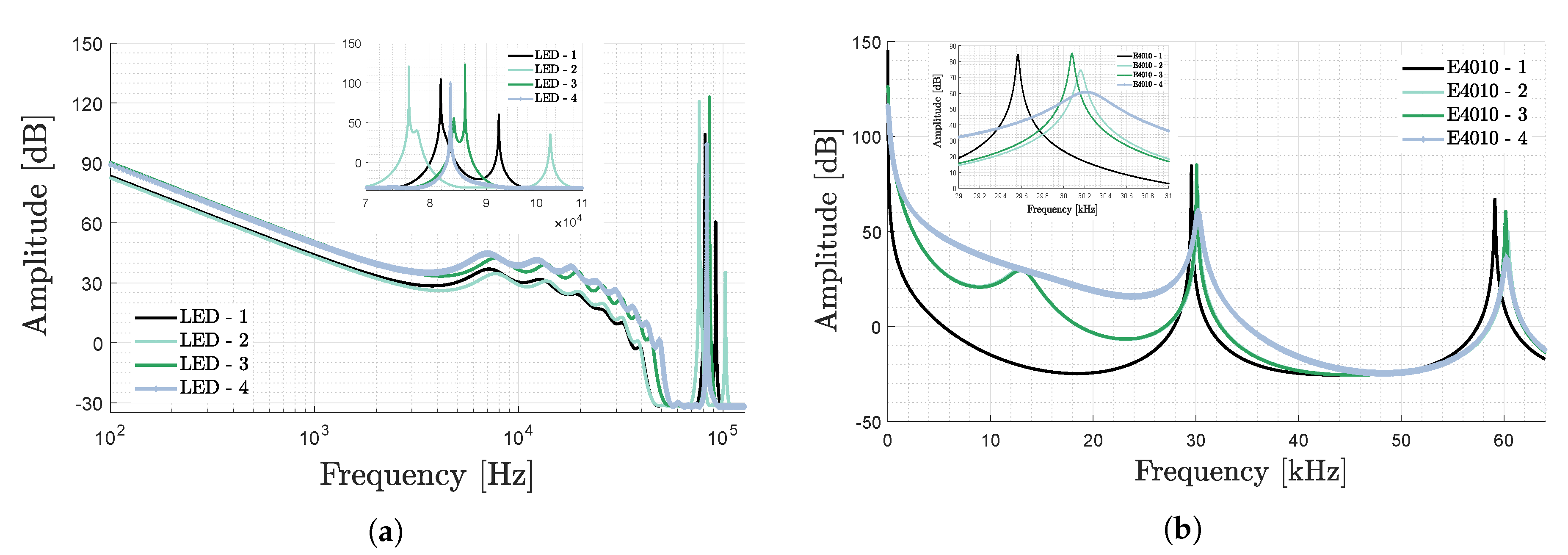
2.2.3. BXRE-35E COB LEDs
2.2.4. ETAP’S E4010 LED Armature
2.3. Applicability of the Characteristic Frequency
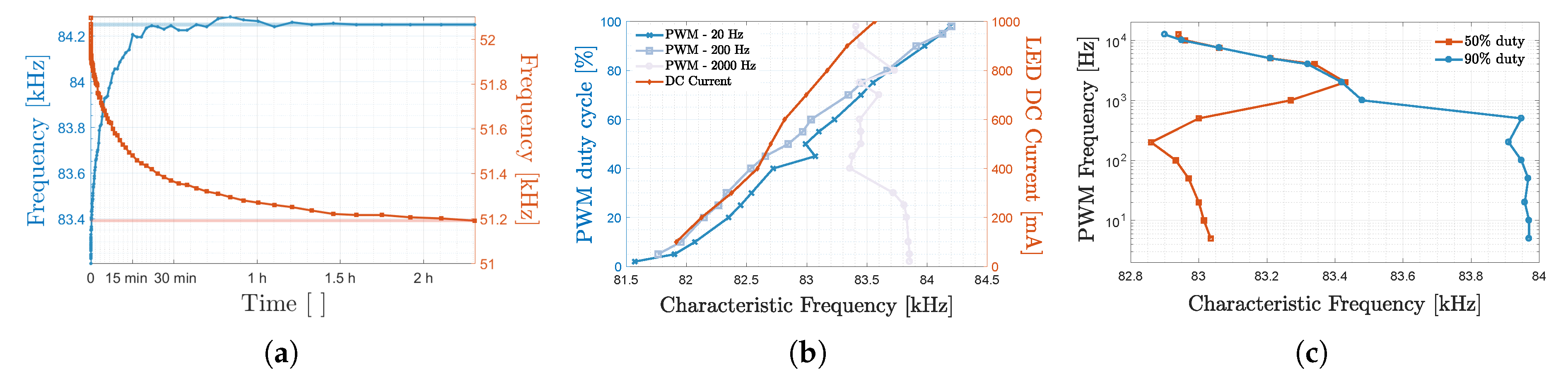
2.3.1. Stability of the CF over Time
2.3.2. Stability of the CF with Light Dimming
2.4. Demodulation
2.5. Positioning Procedure
2.5.1. Trilateration-Based Localisation
2.5.2. Cayley-Menger Determinant Localisation
2.5.3. Model-Based Fingerprinting Localisation
2.5.4. Simultaneous Positioning and Orientating
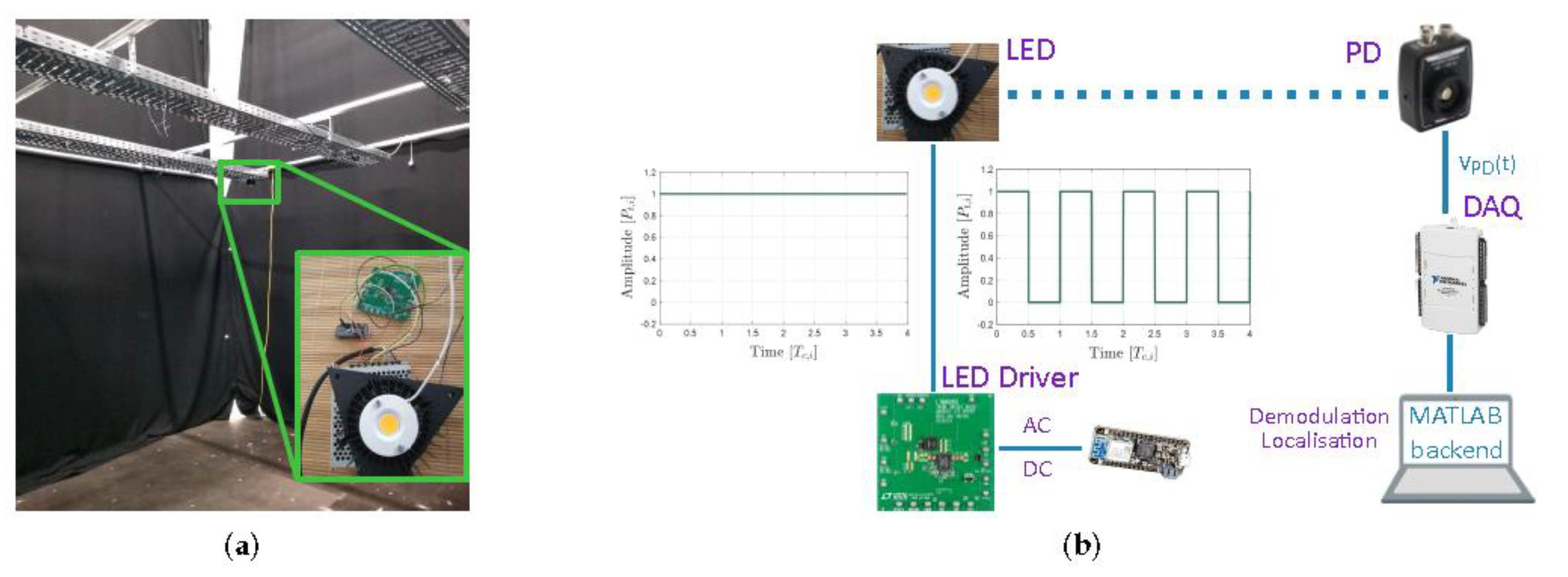
2.6. Positioning Setup
and Calibration
3. Experimental Results
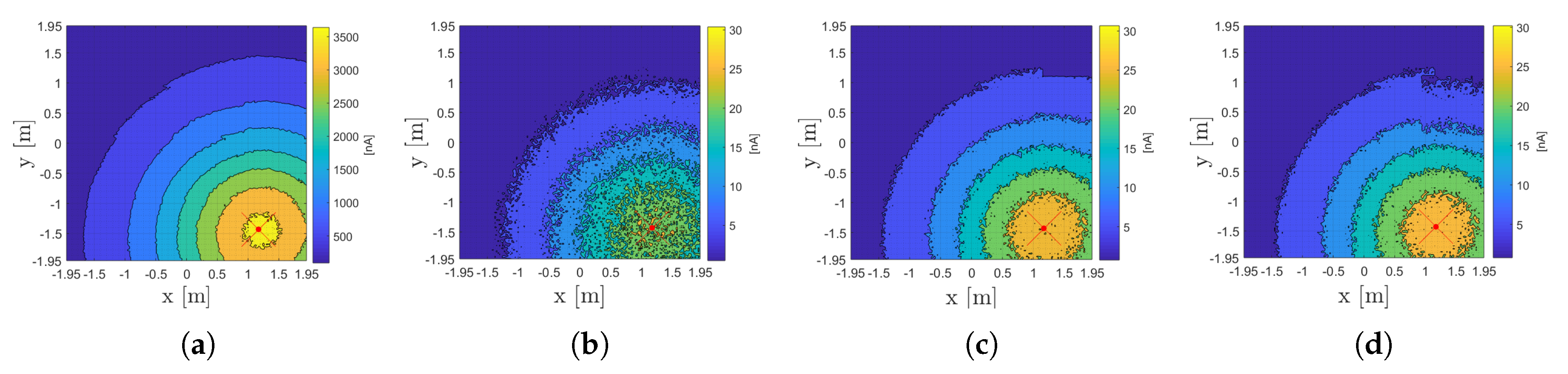
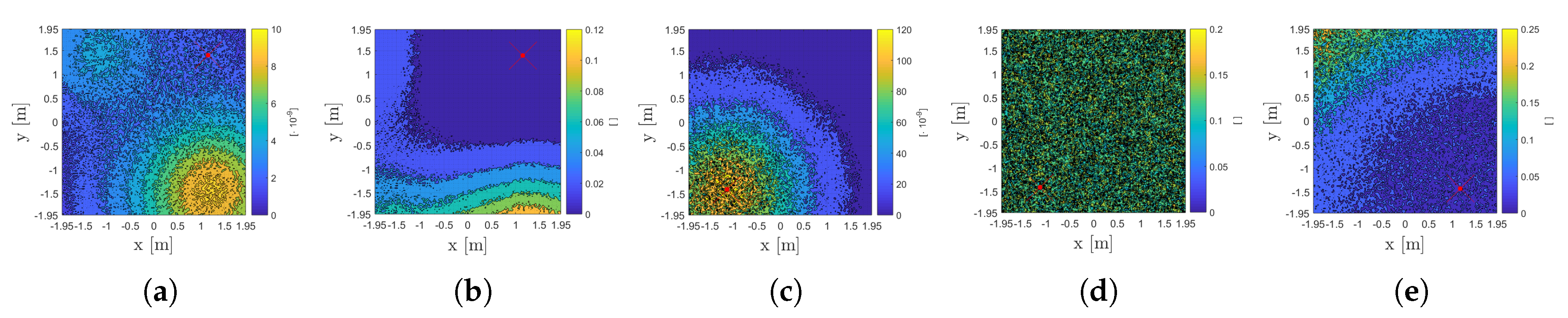
3.1. Propagation
3.2. Fft-Based Localisation
3.2.1. Tuning the Positioning Algorithm Parameters
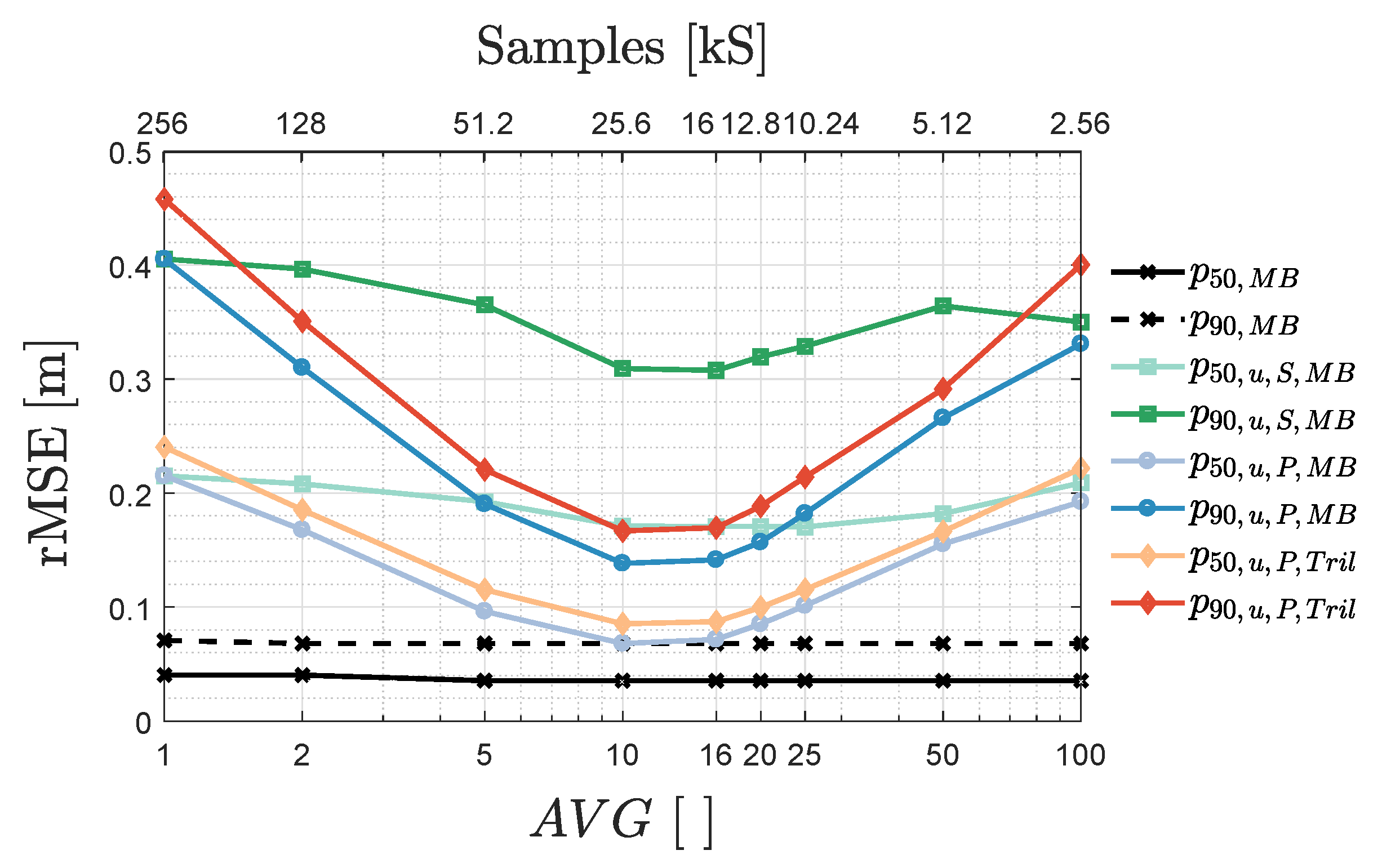
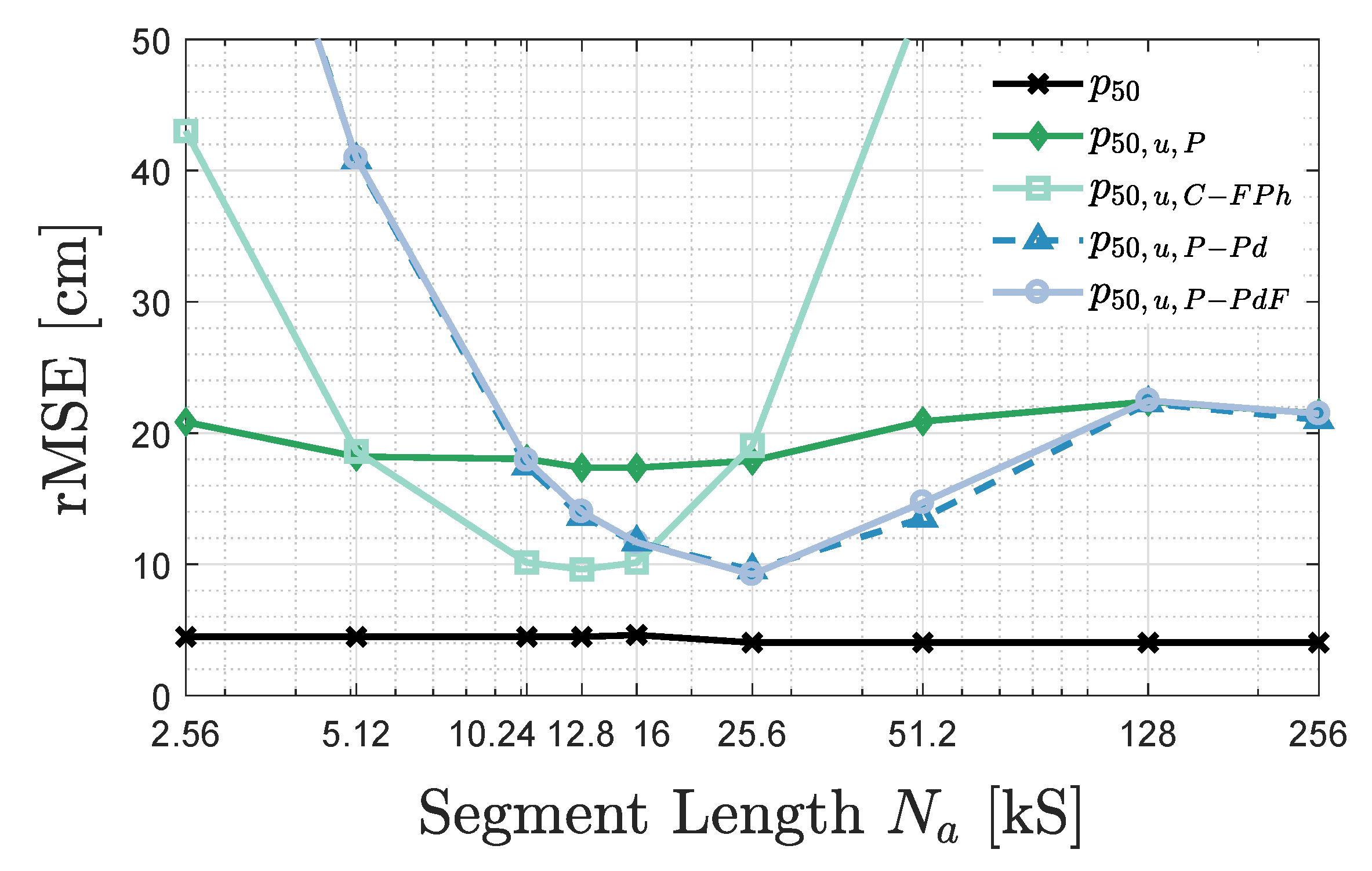
3.2.2. AVG’s Frequency Resolution and Averaging Trade-Off
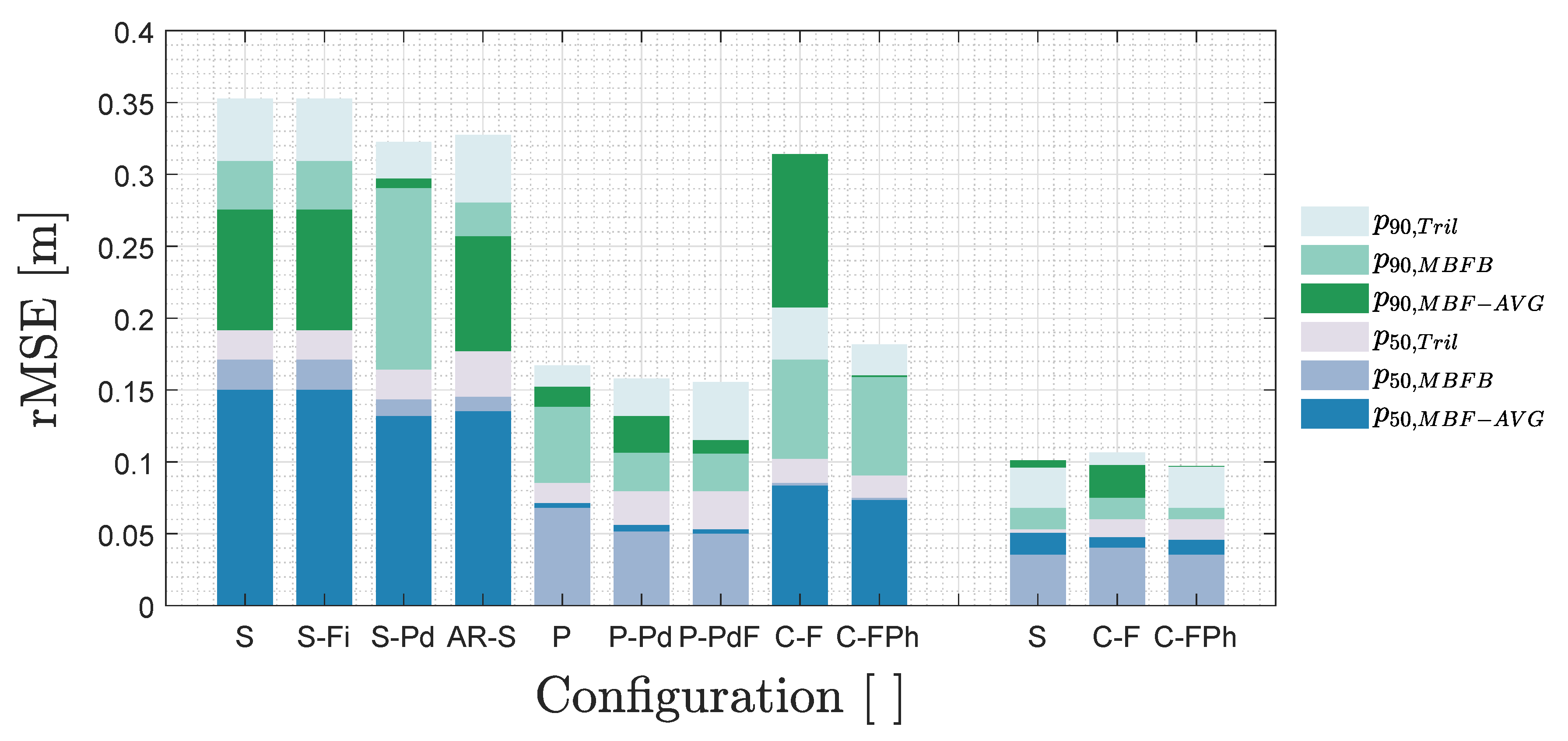
3.3. Demodulation Technique and (U)VLP Accuracy
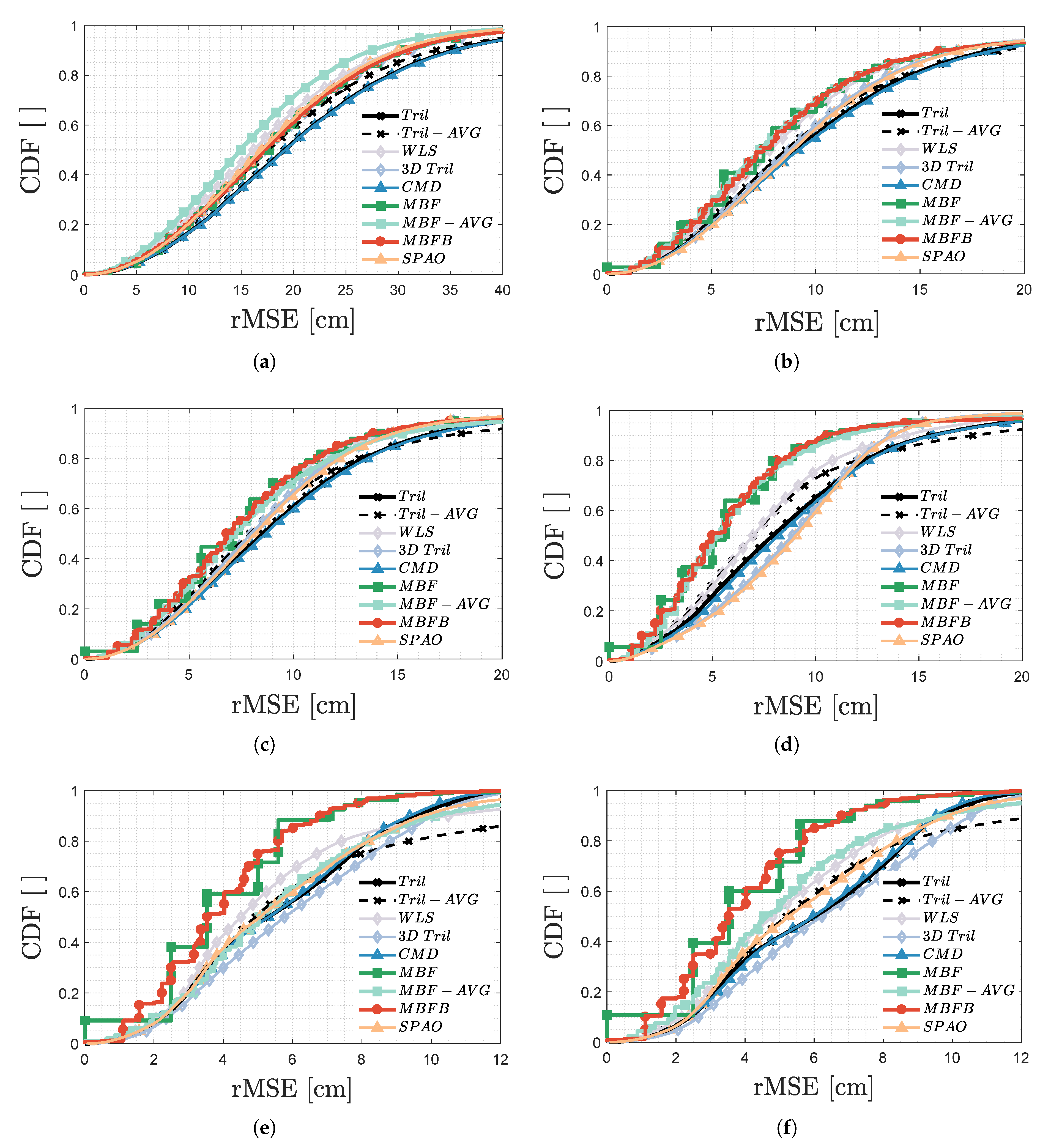
3.3.1. Influence of Demodulation on (U)VLP Rmse
3.3.2. Influence of Demodulation on VLP Rmse
3.3.3. Sources of Localisation Error
Standard Deviation on
Localisation Precision
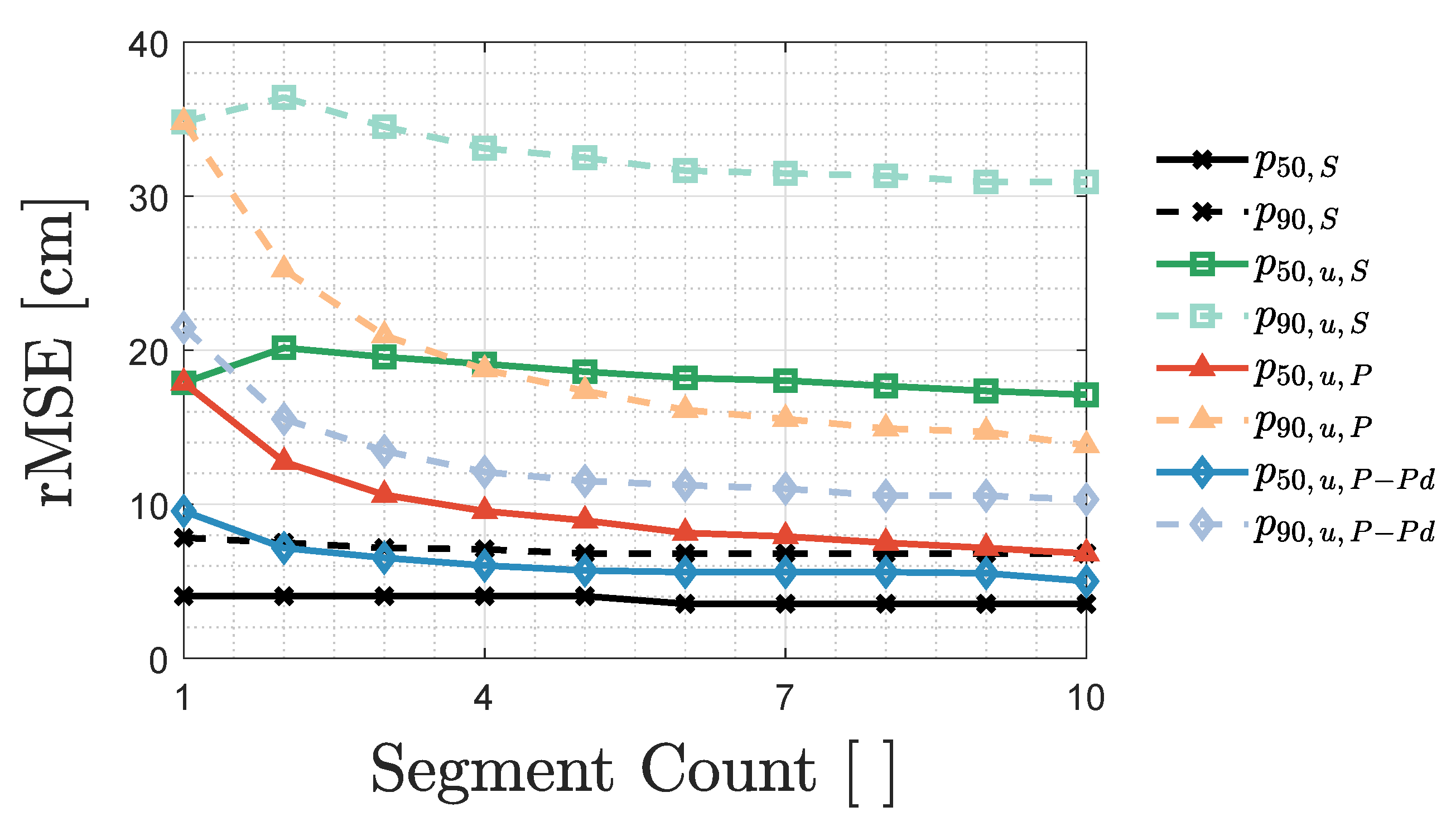
Influence Segment Count for Averaging
3.3.4. Influence of for uVLP
3.3.5. Localisation Complexity
3.4. Influence of Positioning Algorithm
4. Simulation Results
Noise Models
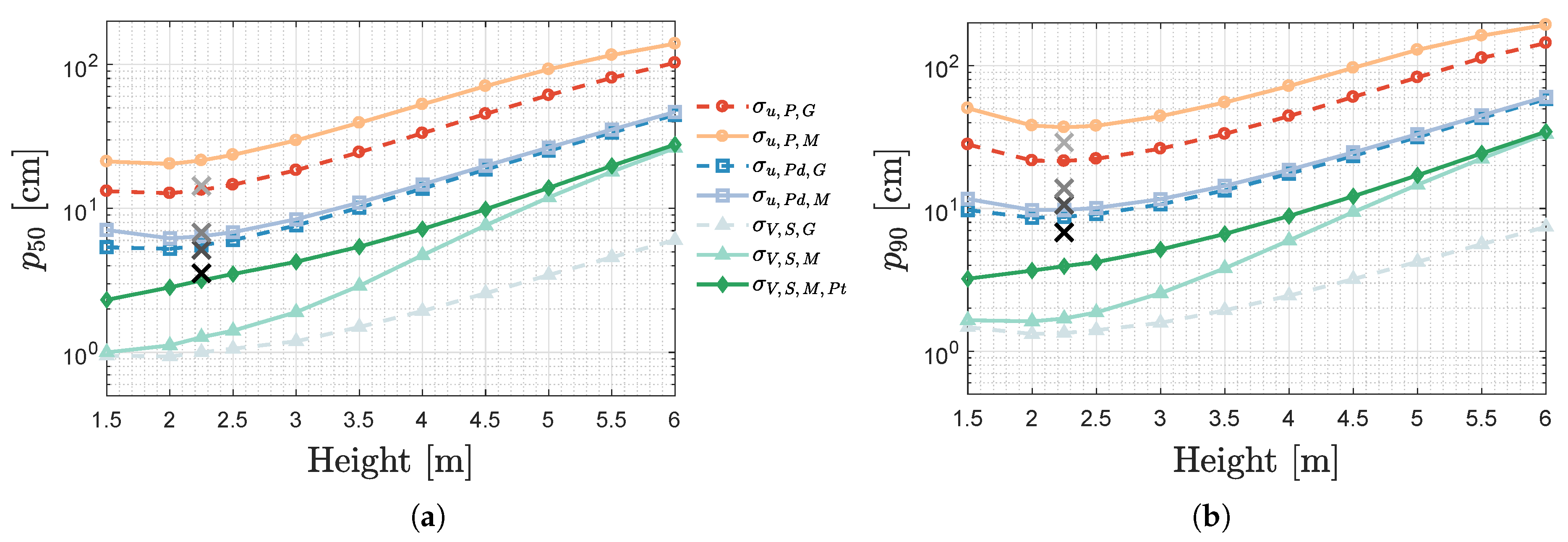
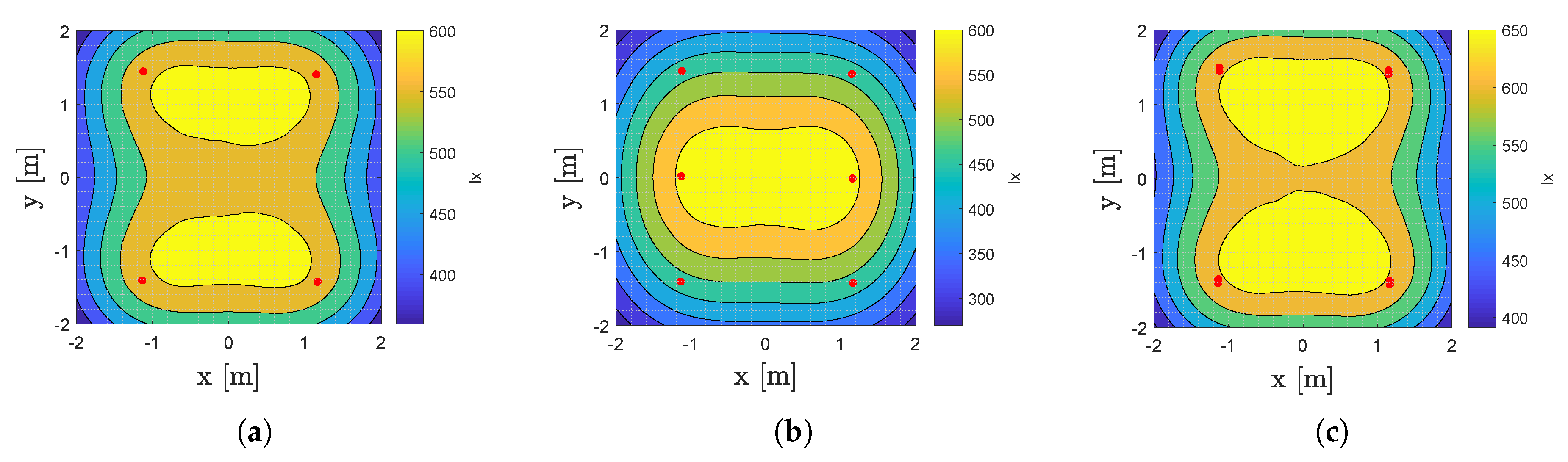
4.1. Feasibility of (U)VLP in the Presence of Higher Ceilings
4.2. (U)VLP and Cost-Savings
5. (U)VLP and Potential Applications
6. Conclusion and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Acronym | Description |
| 3D Tril | 3D extension algorithm of trilateration (Tril) [30] |
| AGV | Automated Guided Vehicle |
| AR | Autoregressive Yule-Walker PSD estimation-based (u)VLP |
| The number of segments is subdivided in, prior to demodulation, to average / | |
| BLE | Bluetooth Low Energy |
| CDF | Cumulative Distribution Function |
| CF | Characteristic Frequency |
| C-F | Sliding-window correlation over frequency |
| C-FPh | Sliding correlation over frequency and phase |
| CMD | Cayley-Menger Determinant localisation [31] |
| DALI | Digital Addressable Lighting Interface |
| Distance between the receiver and LED i | |
| Maintained Illuminance | |
| Ground harmonic frequency of VLP (= | |
| LED i’s frequency: modulation frequency (VLP) or CF (uVLP) | |
| FDMA | Frequency Division Multiplexing Access |
| FFT | Fast Fourier Transform |
| Sampling frequency (=) | |
| , | Frequency step, range during sliding correlation |
| Luminous flux | |
| Photocurrent-based RSS value, obtained via demodulation and converted in | |
| LEDs’ individual photocurrent contribution | |
| (Sub)set of LEDs used in the positioning algorithm (selected in order of descending ) | |
| KNN | (K-) Nearest Neighbours positioning |
| LED | Light-Emitting Diode |
| LSOOP | Light Signals of Opportunity |
| MBF | Model-Based Fingerprinting [22] |
| MBF-AVG | Positioning algorithm that takes the mean of the location estimates of N runs on (see Section 2.5.3) |
| MBFB | Extension of MBFB, where the location estimate is taken to be the mean of all grid coordinates for which the cost function is smaller than the pth percentile of that cost function (p is a parameter) |
| LED-PD gain: (uVLP) and (VLP) | |
| MUSIC | MUltiple SIgnal Classification |
| N | Number of LEDs (=4) |
| Segment length of each of the segments i.e., | |
| Total number of samples collected during of (=) | |
| Order of Complexity | |
| Complexity of the Peak Detect operation | |
| Median/75th/90th percentile positioning rMSE | |
| 50th and 90th percentile of the standard deviation over segments, on the rMSE during MBFB | |
| PD | Photodiode |
| -Pd | Suffix denoting the zero padding procedure that doubles the photovoltage signal’s length |
| Suffix denoting the zero padding procedure, which obtains a per LED FFT length that is a multiple of i.e., to try to ensure coherent sampling. | |
| PEAK or P- | Name or Prefix of the demodulation method that times averages a peak detected / value per location update |
| Received radiant power of LED i | |
| PSD | Power Spectral Density |
| Radiant flux of LED i | |
| PWM | Pulse-Width Modulation |
| RSS | Received Signal Strength |
| rMSE | root-Mean-Square Error |
| Variance of the additive Gaussian noise contribution, used in the simulation Section 4 | |
| Spatial standard deviation on the measured | |
| uVLP Peak noise model where equals the expectation of | |
| uVLP Peak noise model dictating as the product of the expectation of all and | |
| uVLP P-Pd noise model where equals the expectation of | |
| uVLP P-Pd noise model dictating via | |
| VLP SPECT noise model where equals the expectation of |
| VLP SPECT noise model characterised by a power law fit of | |
| with calibration | |
| SNR | Signal-to-Noise-Ratio |
| SPAO | Simultaneous Positioning and Orientating [32] |
| SPECT or S- | Name or Prefix of the demodulation method that times averages the FFT-spectrum before peak detecting / per location update |
| Angular acceptance model of [21] | |
| Phase angle during sliding window correlation | |
| / | Phase Step/Range during sliding window correlation |
| Tril | basic Trilateration Algorithm [28] |
| Tril-AVG | Positioning algorithm that takes the mean of the location estimates of N operations on (see Section 2.5.1) |
| Illuminance Uniformity | |
| uVLP | Unmodulated Visible Light Positioning |
| UWB | Ultra-wideband |
| VLP | Visible Light Positioning |
| Photovoltage-based RSS value, obtained via demodulation and converted in | |
| Individual photovoltage contribution of LED i | |
| Total photovoltage time domain signal | |
| WLS | Weighted Linear Squares trilateration based on singular value decomposition [29] |
| LED i’s coordinates | |
| Unknown receiver position |
References
- Rahman, A.B.M.; Li, T.; Wang, Y. Recent Advances in Indoor Localization via Visible Lights: A Survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef]
- Zhou, Z.; Kavehrad, M.; Deng, P. Indoor positioning algorithm using light-emitting diode visible light communications. Opt. Eng. 2012, 51, 1–6. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, J.; Fu, Y.; Shi, A. Theoretical Accuracy Analysis of Indoor Visible Light Communication Positioning System Based on Received Signal Strength Indicator. J. Lightwave Technol. 2014, 32, 4180–4186. [Google Scholar] [CrossRef]
- Keskin, M.F.; Gezici, S. Comparative Theoretical Analysis of Distance Estimation in Visible Light Positioning Systems. J. Lightwave Technol. 2016, 34, 854–865. [Google Scholar] [CrossRef]
- Li, Z.; Yang, A.; Lv, H.; Feng, L.; Song, W. Fusion of Visible Light Indoor Positioning and Inertial Navigation Based on Particle Filter. IEEE Photonics J. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- Alam, F.; Faulkner, N.; Legg, M.; Demidenko, S. Indoor Visible Light Positioning Using Spring-Relaxation Technique in Real-World Setting. IEEE Access 2019, 7, 91347–91359. [Google Scholar] [CrossRef]
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible light positioning: A roadmap for international standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Cosmas, J.; Meunier, B.; Ali, K.; Jawad, N.; Salih, M.; Meng, H.; Ganley, M.; Gbadamosi, J.; Savov, A.; Hadad, Z.; et al. A Scalable and License Free 5G Internet of Radio Light Architecture for Services in Homes & Businesses. In Proceedings of the 2018 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Valencia, Spain, 6–8 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Tian, Z.; Wei, Y.-L.; Xiong, X.; Chang, W.-N.; Tsai, H.-M.; Lin, K.C.-J.; Zheng, C.; Zhou, X. Position: Augmenting Inertial Tracking with Light. In Proceedings of the 4th ACM Workshop on Visible Light Communication Systems, Snowbird, UT, USA, 16 October 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Z.; Zhang, J.; Huang, C.; Zhang, Q. Polarization-Based Visible Light Positioning. IEEE Trans. Mob. Comput. 2019, 18, 715–727. [Google Scholar] [CrossRef]
- De Lausnay, S.; De Strycker, L.; Goemaere, J.P.; Stevens, N.; Nauwelaers, B. A Visible Light Positioning system using Frequency Division Multiple Access with square waves. In Proceedings of the International Conference on Signal Processing and Communication Systems, Cairns, Australia, 14–16 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Matioli, E.; Brinkley, S.; Kelchner, K.M.; Hu, Y.L.; Nakamura, S.; DenBaars, S.; Speck, J.; Weisbuch, C. High-brightness polarized light-emitting diodes. Light Sci. Appl. 2012, 1, e22. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Y.; Jaakkola, A.; Hakala, T.; Hyyppä, J.; Chen, L.; Tang, J.; Chen, R.; Hyyppä, H. The uses of ambient light for ubiquitous positioning. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS 2014), Monterey, CA, USA, 5–8 May 2014; pp. 102–108. [Google Scholar] [CrossRef]
- Amsters, R.; Demeester, E.; Slaets, P.; Stevens, N. Unmodulated Visible Light Positioning Using the Iterated Extended Kalman Filter. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Xu, Q.; Zheng, R.; Hranilovic, S. IDyLL: Indoor localization using inertial and light sensors on smartphones. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 307–318. [Google Scholar] [CrossRef]
- Li, Q.-L.; Wang, J.-Y.; Huang, T.; Wang, Y. Three-dimensional indoor visible light positioning system with a single transmitter and a single tilted receiver. Opt. Eng. 2016, 50, 106103. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, X. Visible Light Localization Using Conventional Light Fixtures and Smartphones. IEEE Trans. Mob. Comput. 2019, 18, 2968–2983. [Google Scholar] [CrossRef]
- Van der Broeck, H.; Sauerlander, G.; Wendt, M. Power driver topologies and control schemes for LEDs. In Proceedings of the Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition (APEC 07), Anaheim, CA, USA, 25 February–1 March 2007; pp. 1319–1325. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Bastiaens, S.; Raes, W.; Stevens, N.; Martens, L.; Joseph, W.; Plets, D. Impact of a Photodiode’s Angular Characteristics on RSS-Based VLP Accuracy. IEEE Access 2020, 8, 83116–83130. [Google Scholar] [CrossRef]
- Bastiaens, S.; Plets, D.; Martens, L.; Joseph, W. Response Adaptive Modelling for Reducing the Storage and Computation of RSS-based VLP. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Drapela, J.; Langella, R.; Testa, A.; Collin, A.J.; Xu, X.; Djokic, S.Z. Experimental evaluation and classification of LED lamps for light flicker sensitivity. In Proceedings of the 18th International Conference on Harmonics and Quality of Power (ICHQP), Ljubljana, Slovenia, 13–16 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Rönnberg, S.K.; Bollen, M.H.J. Emission from four types of LED lamps at frequencies up to 150 kHz. In Proceedings of the IEEE 15th International Conference on Harmonics and Quality of Power, Hong Kong, China, 17–20 June 2012; pp. 451–456. [Google Scholar] [CrossRef]
- Larsson, E.O.A.; Bollen, M.H.J.; Wahlberg, M.G.; Lundmark, C.M.; Rönnberg, S.K. Measurements of high-frequency (2–150 kHz) distortion in low-voltage networks. IEEE Trans. Power Deliv. 2010, 25, 1749–1757. [Google Scholar] [CrossRef]
- Gancarz, J.; Elgala, H.; Little, T.D.C. Impact of lighting requirements on VLC systems. IEEE Commun. Mag. 2013, 51, 34–41. [Google Scholar] [CrossRef]
- Kahn, J.M.; Barry, J.R. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef]
- Gu, W.; Aminikashani, M.; Deng, P.; Kavehrad, M. Impact of Multipath Reflections on the Performance of Indoor Visible Light Positioning Systems. J. Lightwave Technol. 2016, 34, 2578–2587. [Google Scholar] [CrossRef]
- Park, C.-H.; Hong, K.-S. Source localization based on SVD without a priori knowledge. In Proceedings of the 12th International Conference on Advanced Communication Technology (ICACT), Gangwon-do, South Korea, 7–10 February 2010; pp. 3–7. [Google Scholar]
- Plets, D.; Almadani, Y.; Bastiaens, S.; Ijaz, M.; Martens, L.; Joseph, W. Efficient 3D trilateration algorithm for visible light positioning. J. Opt. 2019, 21, 05LT01. [Google Scholar] [CrossRef]
- Thomas, F.; Ros, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, A.; Lau, V. Robust Visible Light-Based Positioning Under Unknown User Device Orientation Angle. In Proceedings of the 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, Australia, 17–19 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Plets, D.; Bastiaens, S.; Ijaz, M.; Almadani, Y.; Martens, L.; Raes, W.; Stevens, N.; Joseph, W. Three-dimensional Visible Light Positioning: An Experimental Assessment of the Importance of the LEDs’ Location. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Trogh, J.; Plets, D.; Martens, L.; Joseph, W. Advanced real-time indoor tracking based on the Viterbi algorithm and semantic data. Int. J. Distrib. Sens. Netw. 2015, 11, 271818. [Google Scholar] [CrossRef]
- Plets, D.; Bastiaens, S.; Martens, L.; Joseph, W.; Stevens, N. On the impact of LED power uncertainty on the accuracy of 2D and 3D visible light positioning. OPTIK 2019, 195, 163027. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Sharpe, L.T.; Stockman, A.; Jagla, W.; Jägle, H. A luminous efficiency function, V*(λ), for daylight adaptation. J. Vis. 2005, 5, 948–968. [Google Scholar] [CrossRef]
- IESNA Calculation Procedures Committee. Recommended Procedure for Calculating Coefficients of Utilization, Wall Exitance Coefficients, and Ceiling Cavity Exitance Coefficients. J. Illum. Eng. Soc. 1982, 12, 3–11. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | uVLP | VLP |
|---|---|---|
| Principle | ||
| Frequency range | 30–90 kHz | up to MHz |
| Modulation index | 0% | 50% |
| Average LED current | 100% | 50% |
| Luminous flux per LED | 100% | 55% |
| Accuracy | ||
| Experimental | 5.0 cm | 3.5 cm at 2.25 m |
| Projected in industry | >46.7 cm | >27.8 cm at 6 m |
| Cost | ||
| Retrofitting effort | None | VLP-enabled LED driver |
| Transmitter-side cost | None | LED driver + new lamps for illuminance |
| Receiver-side cost | Equal | Equal |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastiaens, S.; Deprez, K.; Martens, L.; Joseph, W.; Plets, D. A Comprehensive Study on Light Signals of Opportunity for Subdecimetre Unmodulated Visible Light Positioning. Sensors 2020, 20, 5596. https://doi.org/10.3390/s20195596
Bastiaens S, Deprez K, Martens L, Joseph W, Plets D. A Comprehensive Study on Light Signals of Opportunity for Subdecimetre Unmodulated Visible Light Positioning. Sensors. 2020; 20(19):5596. https://doi.org/10.3390/s20195596
Chicago/Turabian StyleBastiaens, Sander, Kenneth Deprez, Luc Martens, Wout Joseph, and David Plets. 2020. "A Comprehensive Study on Light Signals of Opportunity for Subdecimetre Unmodulated Visible Light Positioning" Sensors 20, no. 19: 5596. https://doi.org/10.3390/s20195596
APA StyleBastiaens, S., Deprez, K., Martens, L., Joseph, W., & Plets, D. (2020). A Comprehensive Study on Light Signals of Opportunity for Subdecimetre Unmodulated Visible Light Positioning. Sensors, 20(19), 5596. https://doi.org/10.3390/s20195596