Underground Coal Mine Fingerprint Positioning Based on the MA-VAP Method

Abstract
1. Introduction
2. Underground Fingerprint Positioning System Based on MA-VAP Method
2.1. VAP Method
2.2. MA-VAP Method
2.3. System Structure and Operation Process
3. VAP Arrangement
3.1. Problem Analysis
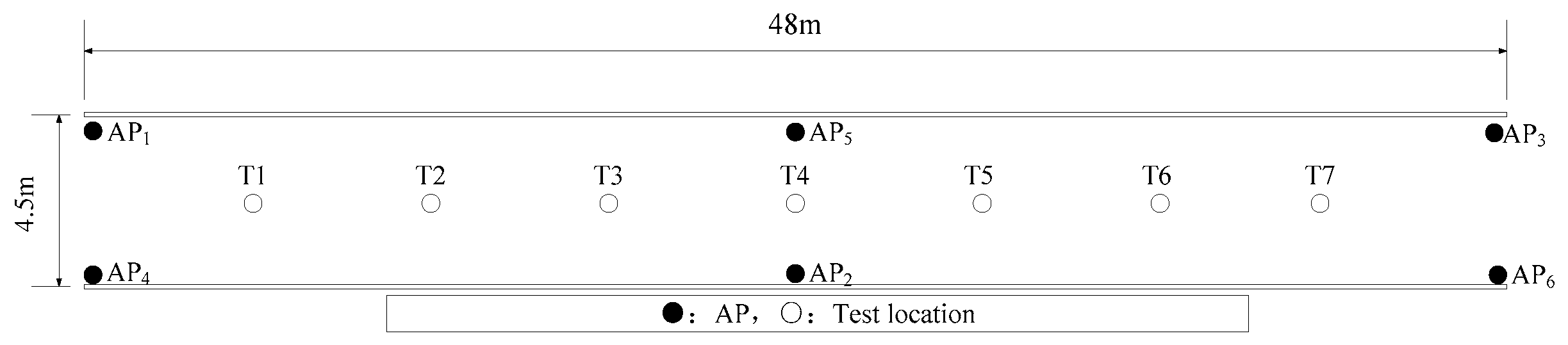
3.2. VAP Arrangement Experiment
4. Results and Discussion
4.1. Establishment of Underground Positioning Experiment
4.2. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hu, Q.S.; Zhang, S.; Wu, L.X.; Ding, E.J. Localization techniques of mobile objects in coal mines: Challenges, solutions and trends. J. China Coal Soc. 2016, 41, 1059–1068. [Google Scholar]
- Fang, W. Three dimensional DV-Hop location technology for coal mine based on WSNs. In Proceedings of the IEEE International Conference on Computational Science and Engineering, Guangzhou, China, 21–24 July 2017; pp. 22–25. [Google Scholar]
- Ji, P.; Zhao, P.P.; Song, M.Z.; Zhang, K.N. Coal mine underground localization method based on wireless access point selection. Indian Mine Autom. 2019, 45, 69–72. [Google Scholar]
- Wang, L.N. Study on Underground Colliery Personnel Locating Technology Based on Wi-Fi. Master’s Thesis, Henan Polytechnic University, Jiaozuo, China, 2015. [Google Scholar]
- Tian, X.H.; Wang, M.; Li, W.X.; Jiang, B.Y.; Xu, D.; Wang, X.B.; Xu, J. Improve accuracy of fingerprinting localization with temporal correlation of the RSS. IEEE Trans. Mob. Comput. 2018, 17, 113–126. [Google Scholar] [CrossRef]
- Hong, K.; Kim, J.P.; Kim, M.S.; Lee, S.K. Channel measurement-based access point selection in IEEE 802.11 WLANs. Pervasive Mob. Comput. 2016, 30, 58–70. [Google Scholar] [CrossRef]
- Tian, X.H.; Li, W.X.; Yang, Y.C.; Zhang, Z.H.; Wang, X.B. Optimization of fingerprints reporting strategy for WLAN indoor localization. IEEE Trans. Mob. Comput. 2019, 17, 390–403. [Google Scholar] [CrossRef]
- Ali, M.U.; Hur, S.; Park, S.; Park, Y. Harvesting indoor positioning accuracy by exploring multiple features from received signal strength vector. IEEE Access 2019, 7, 52110–52121. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, E.J.; Zhao, Z.K.; Hu, Y.J.; Wang, X.; Zhang, K. A novel fingerprinting using channel state information with MIMO-OFDM. Clust. Comput. J. Netw. Softw. Tools Appl. 2017, 20, 3299–3312. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, E.J.; Hu, Y.J.; Liu, Y.F. A novel CSI-based fingerprinting for localization with a single AP. EURASIP J. Wirel. Commun. Netw. 2019, 51, 1–14. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Indoor positioning on disparate commercial smartphones using Wi-Fi access points coverage area. Sensors 2019, 19, 4351. [Google Scholar] [CrossRef]
- Maghdid, S.A.; Maghdid, H.S.; Hmasalah, S.R.; Ghafoor, K.Z.; Sadiq, A.S.; Khan, S. Indoor human tracking mechanism using integrated onboard smartphones Wi-Fi device and inertial sensors. Telecommun. Syst. 2019, 71, 447–458. [Google Scholar] [CrossRef]
- Kim, T.; Kim, E.J. A novel 3D indoor localization scheme using virtual access point. Int. J. Distrib. Sens. Netw. 2014, 10, 1–14. [Google Scholar] [CrossRef]
- Roth, J.D.; Martin, J.; Mayberry, T. A graph-theoretic approach to virtual access point correlation. In Proceedings of the IEEE Conference on Communications and Network Security, Las Vegas, NV, USA, 9–11 October 2017; pp. 1–9. [Google Scholar]
- Li, D.M.; Labinghisa, B. Indoor localization system based on virtual access points with filtering schemes. Int. J. Distrib. Sens. Netw. 2019, 15, 1–11. [Google Scholar]
- Labinghisa, B.; Li, D.M. Performance analysis of indoor localization algorithm using virtual access points in Wi-Fi environment. KIPS Trans. Comput. Syst. 2017, 6, 113–120. [Google Scholar] [CrossRef][Green Version]
- Ali-Loytty, S.; Perala, T.; Honkavirta, V.; Piche, R. Fingerprint Kalman filter in indoor positioning applications. In Proceedings of the IEEE Control Application, (CCA) & Intelligent Control, (ISIC), St. Petersburg, Russia, 8–10 July 2009; pp. 1678–1683. [Google Scholar]
- Sakib, M.; Quyum, M.; Andersson, K.; Synnes, K.; Korner, U. Improving Wi-Fi based indoor positioning using particle filter based on signal strength. In Proceedings of the IEEE 19th International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Singapore, 21–24 April 2014; pp. 1–6. [Google Scholar]
- Turkoral, T.; Tamer, O.; Yetis, S. Short range indoor distance estimation by using RSSI metric. Istanb. Univ. J. Electr. Electron. Eng. 2017, 17, 3295–3302. [Google Scholar]
- Labinghisa, B.; Park, G.S.; Lee, D.M. Performance analysis of localization algorithm using virtual access point and Kalman filter in indoor Wi-Fi environment. J. Korea Inform. Commun. Soc. 2017, 42, 1463–14669. [Google Scholar]
- Tian, H.L.; Qian, Z.H.; Liang, X.; Wang, Y.J.; Wang, X. Discrete degree WKNN location fingerprinting algorithm based on Wi-Fi. J. Harbin Inst. Technol. 2017, 49, 94–99. [Google Scholar]
- Li, X.C.; Fang, Z.X.; Zhang, C.H. Indoor positioning algorithm based on KPCA and Improved GBRT. Chin. J. Sens. Actuators 2019, 32, 430–437. [Google Scholar]
- He, S.; Hu, T.; Chan, S.G. Toward practical deployment of fingerprint-based indoor localization. IEEE Pervasive Comput. 2017, 16, 76–83. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN fingerprinting indoor positioning methods and deployment challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef]
- Wu, C.S.; Yang, Z.; Zhou, Z.M.; Liu, Y.H.; Liu, M.Y. Mitigating large errors in WiFi-based indoor localization for smartphones. IEEE Trans. Veh. Technol. 2017, 66, 6246–6257. [Google Scholar] [CrossRef]
- Qian, J.S.; Song, M.Z. Research and application of underground WLAN adaptive radio fingerprint database. Sensors 2020, 20, 1182. [Google Scholar] [CrossRef] [PubMed]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Number of VAPs | Positioning Error (m) | |
|---|---|---|
| VAP Method | MA-VAP Method | |
| 0 | 10.5 | 10.5 |
| 1 () | 8.5 | 8.5 |
| 2 () | 8 | 7 |
| 3 () | 6.5 | 6 |
| 4 () | 5 | 4.5 |
| 5 () | 5 | 4 |
| 6 () | 4.5 | 3.5 |
| 7 () | 4 | 3.5 |
| Scenario | Positioning Error (m) | |
|---|---|---|
| VAP Method | MA-VAP Method | |
| 1 | 5 | 4.5 |
| 2 | 5.5 | 5 |
| 3 | 5 | 4.5 |
| Combination Group | Positioning Methods |
|---|---|
| A | WKNN without VAPs |
| B | KPCA without VAPs |
| C | VAP + WKNN |
| D | VAP + KPCA |
| E | MA-VAP + WKNN |
| F | MA-VAP + KPCA |
| Combination Group | Positioning Error (m) |
|---|---|
| A | 4.5 |
| B | 4 |
| C | 4.5 |
| D | 4.5 |
| E | 4 |
| F | 3.5 |
| Combination Group | Positioning Error (m) |
|---|---|
| A | 6.5 |
| B | 5.5 |
| C | 5 |
| D | 4.5 |
| E | 4.5 |
| F | 3.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.; Qian, J. Underground Coal Mine Fingerprint Positioning Based on the MA-VAP Method. Sensors 2020, 20, 5401. https://doi.org/10.3390/s20185401
Song M, Qian J. Underground Coal Mine Fingerprint Positioning Based on the MA-VAP Method. Sensors. 2020; 20(18):5401. https://doi.org/10.3390/s20185401
Chicago/Turabian StyleSong, Mingzhi, and Jiansheng Qian. 2020. "Underground Coal Mine Fingerprint Positioning Based on the MA-VAP Method" Sensors 20, no. 18: 5401. https://doi.org/10.3390/s20185401
APA StyleSong, M., & Qian, J. (2020). Underground Coal Mine Fingerprint Positioning Based on the MA-VAP Method. Sensors, 20(18), 5401. https://doi.org/10.3390/s20185401