A Frequency-Correcting Method for a Vortex Flow Sensor Signal Based on a Central Tendency


Abstract
:1. Introduction
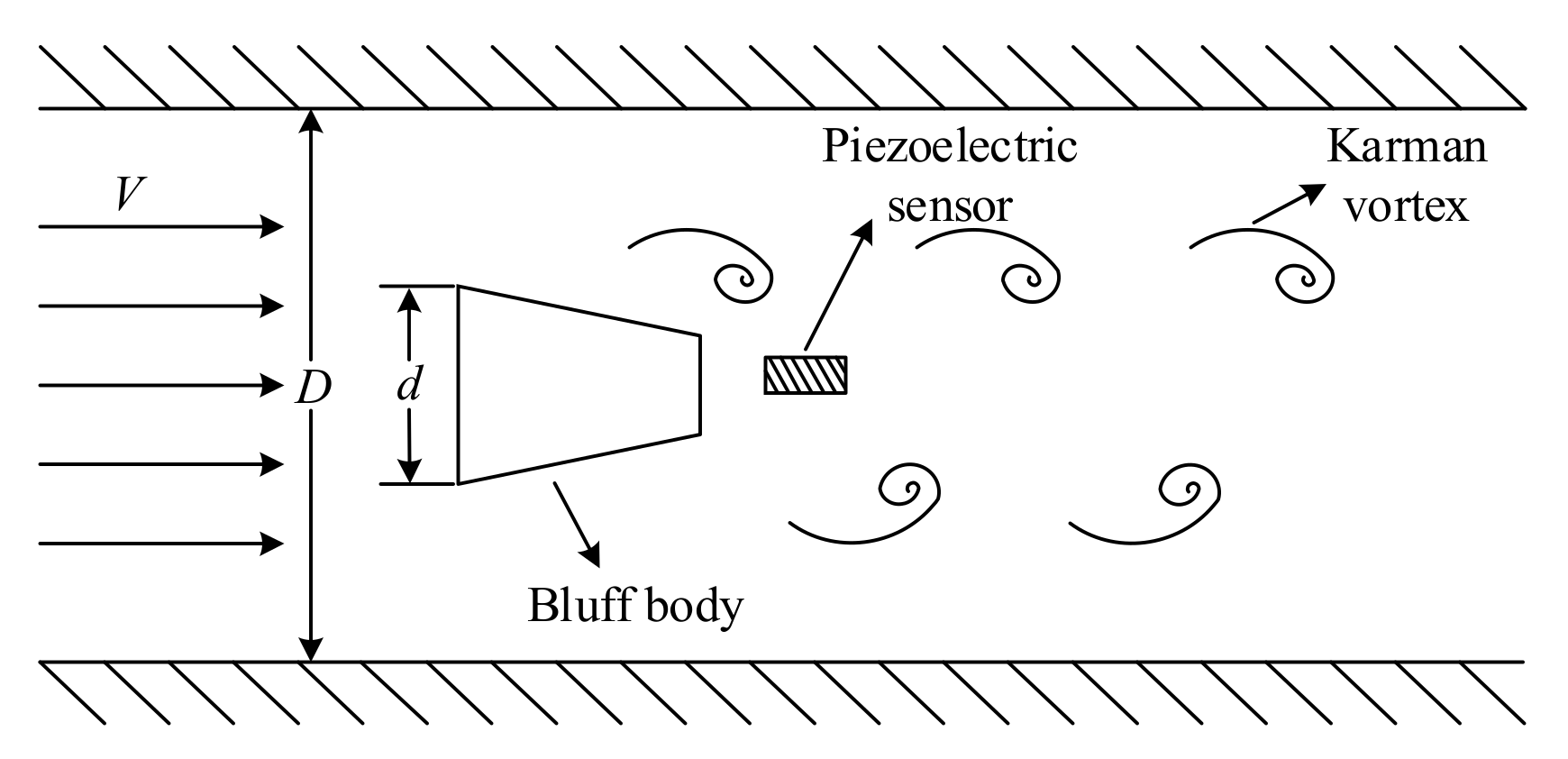
- Ideally, the output signal of vortex flow sensor is a sinusoidal wave [5,6] and its frequency is proportional to the flow velocity [7], as shown in Equation (1). Therefore, the flow velocity can be measured by measuring the signal frequency;where ) is the signal frequency, is the Strouhal number, is the fluid velocity, and is the width of the bluff body.
- The vortex signal also satisfies the characteristic that the amplitude is proportional to the frequency square [7], as shown in Equation (2), which is called the amplitude square dependence.where is the amplitude; is the fluid density.
2. Analysis of Generalized Mode
2.1. The Background of Generalized Mode
- The mean represents the mean level of data, which can be calculated without data sorting. Compared with median and mode, it has good real-time performance. However, the mean is sensitive to each data and vulnerable to the influence of outliers [28,29]. In the case of skewed distribution, it will deviate from the overall characteristics of the data, or even become less representative.
- The median represents the level of the middle position of the data, which only considers the centre position of the data set, but does not care about the difference between value of other samples and the median. Therefore, the median is robust. In the skewed distribution, it is always between the mean and the mode. Compared with the mean, outliers have less influence on it, but its selection ignores the statistical characteristics of most data.
- The mode is the value of the data with the most frequent occurrence. It is the most direct statistic to reflect the central tendency of the data. Compared with mean and median, mode is not easily affected by outliers, while most of the statistical characteristics of data are retained. Mode adapts to the widest data distributions, which has a significant advantage in analyzing the central tendency of data.
2.2. The Definition of Generalized Mode
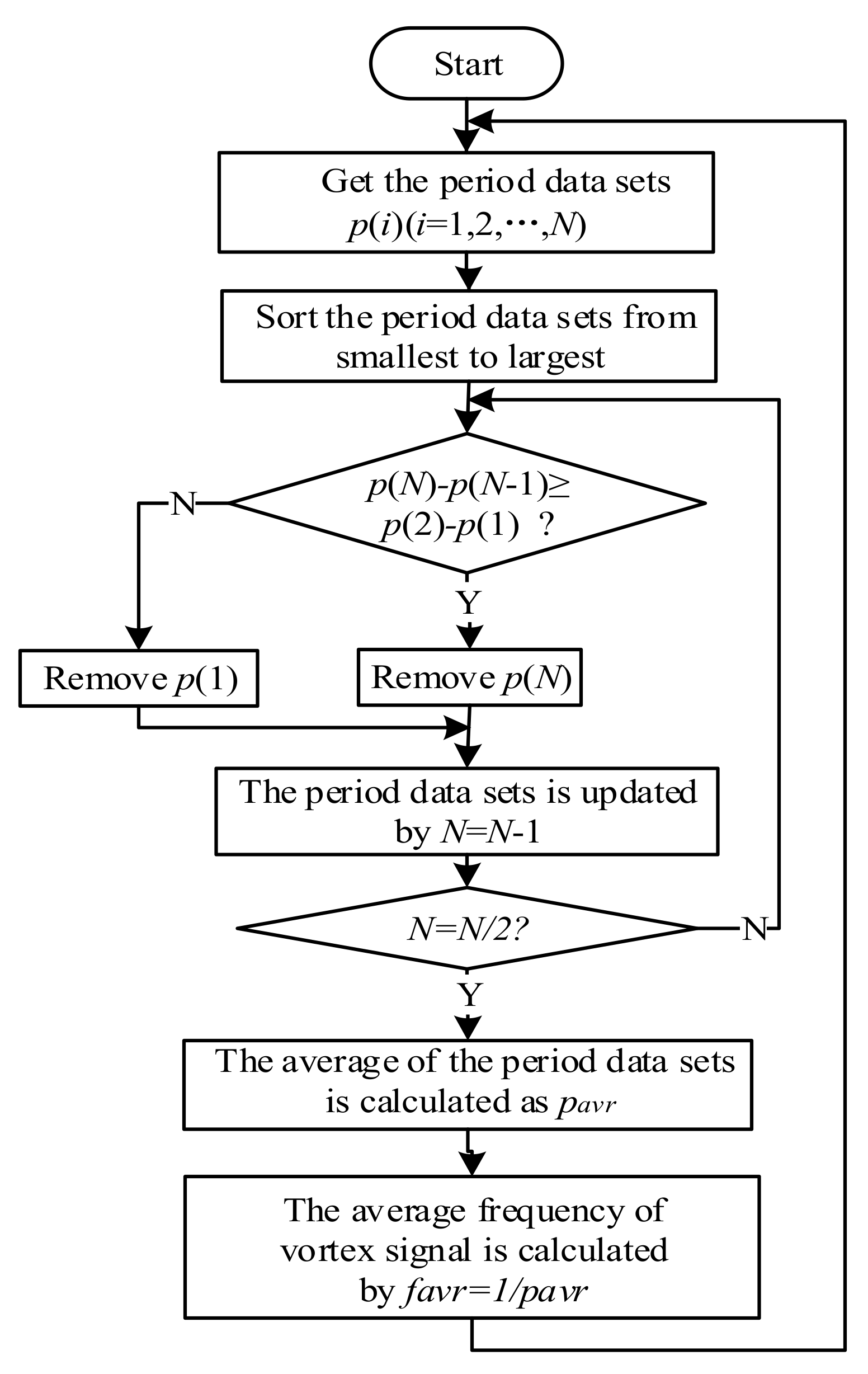
- Sort the data set size in ascending order: ;
- Calculate and ;
- If , will be discarded; otherwise, will be discarded. Whatever, the length of the data set and the data set is updated;
- Repeat the above steps until , then the generalized mode is calculated as Equation (9).
2.3. The Design of Generalized Mode Method
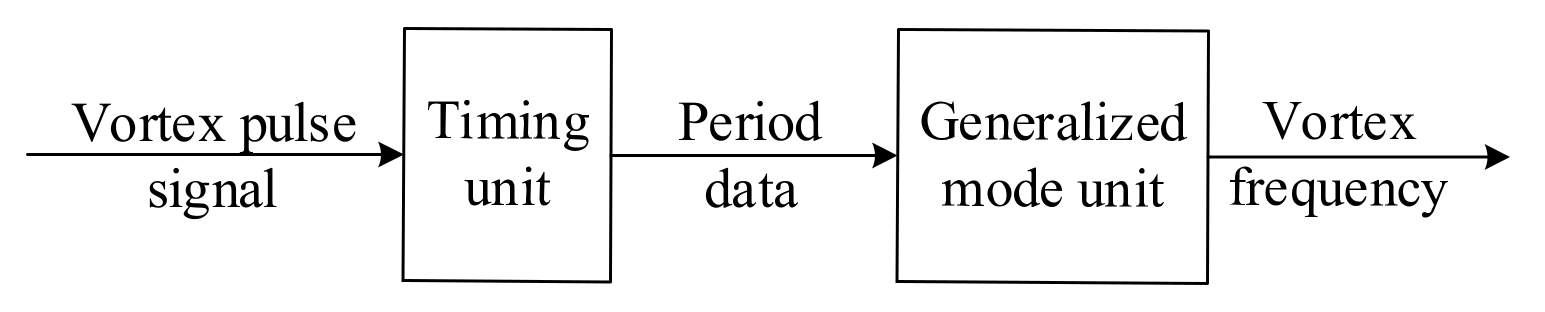
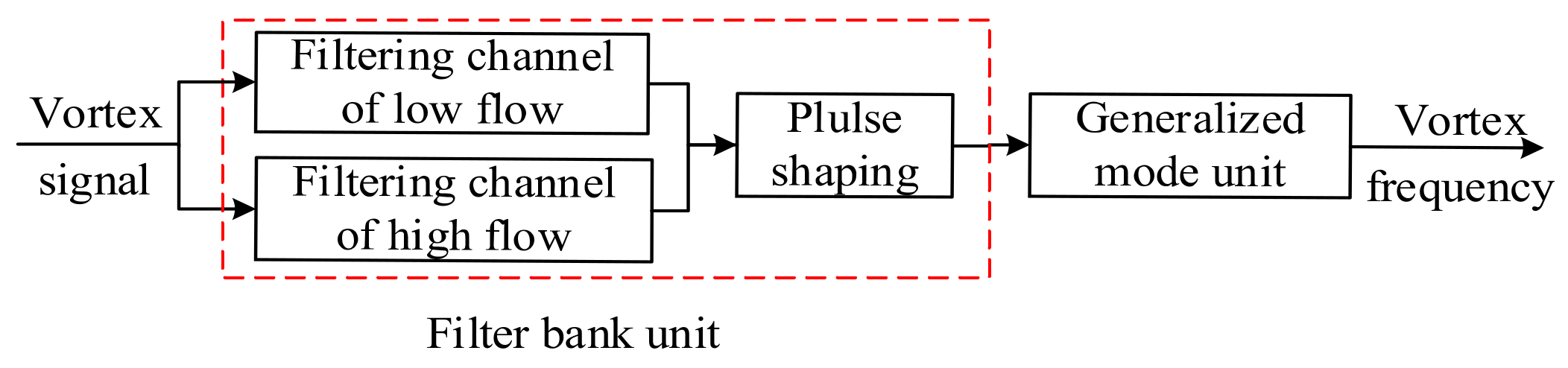
3. System Algorithm Design
4. Simulation Verification
4.1. The General Design of Simulation
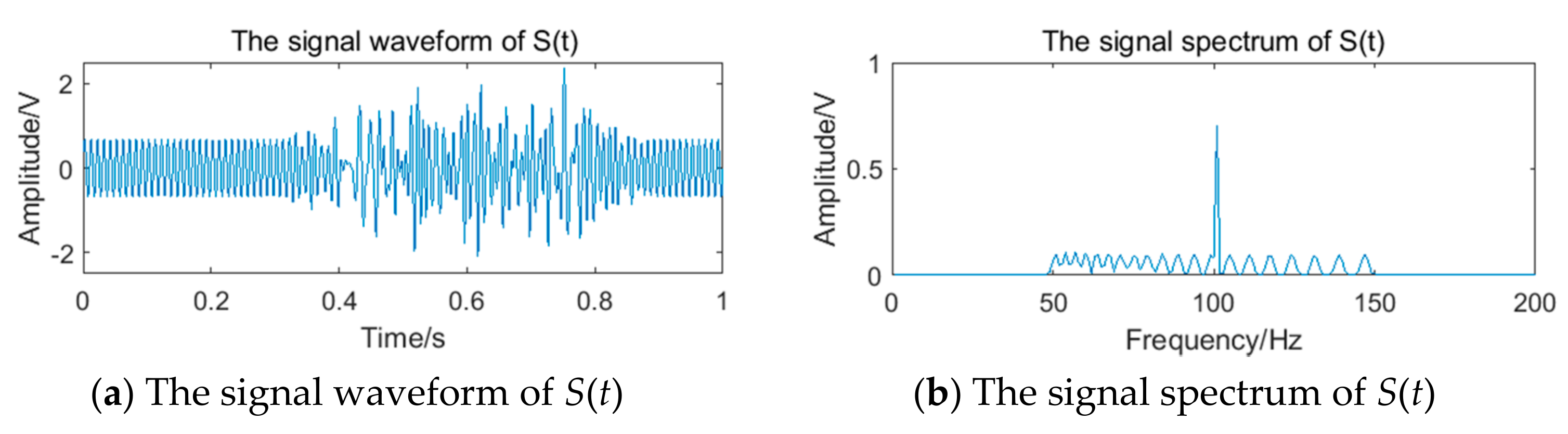
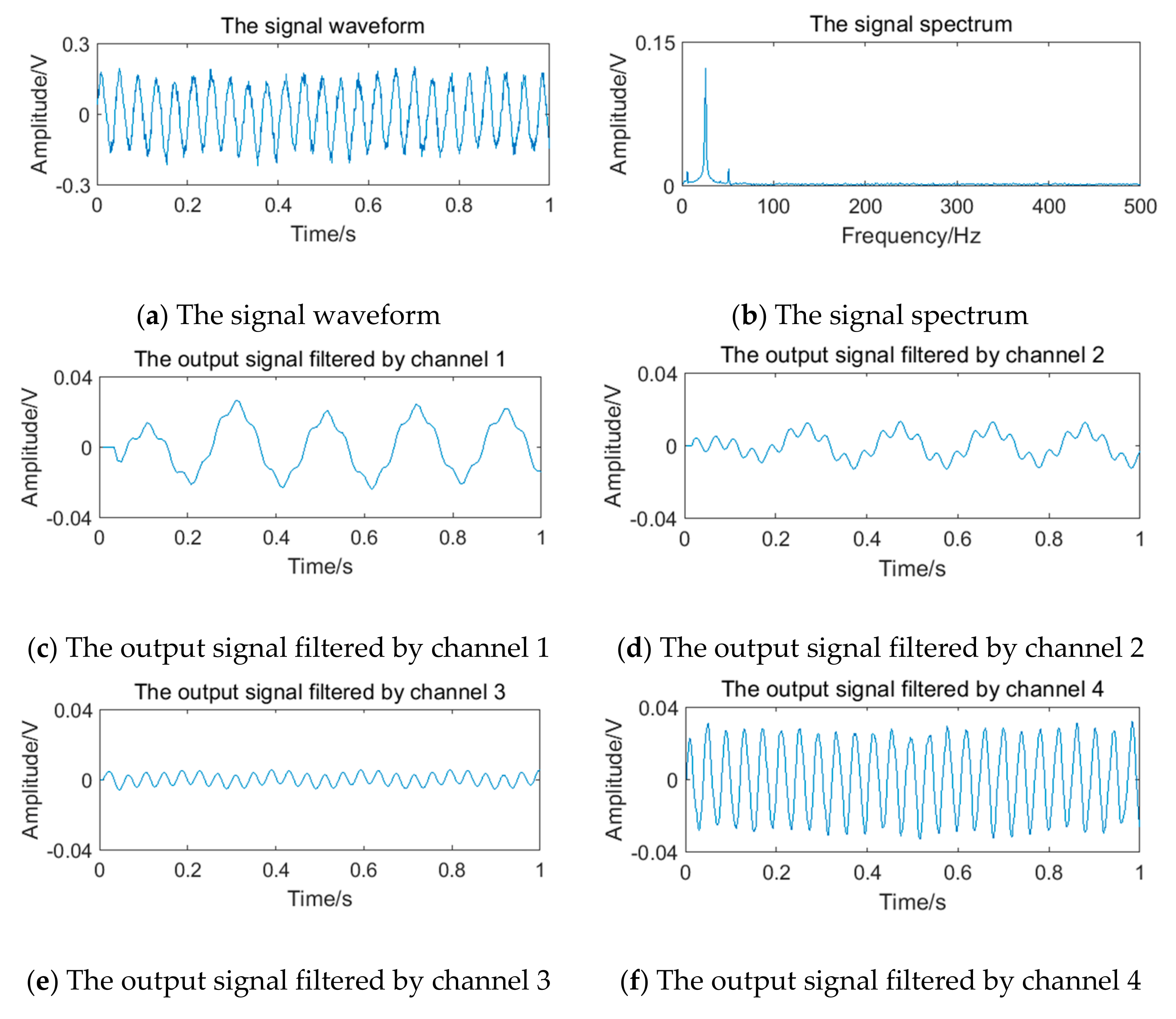
4.2. Feasibility Performance
- It has the form of a sine wave, which satisfies the proportional relationship between frequency and flow as shown in Equation (10), including different frequency points in each channel;
- The amplitude shown in Equation (11) is proportional to the square of the frequency.
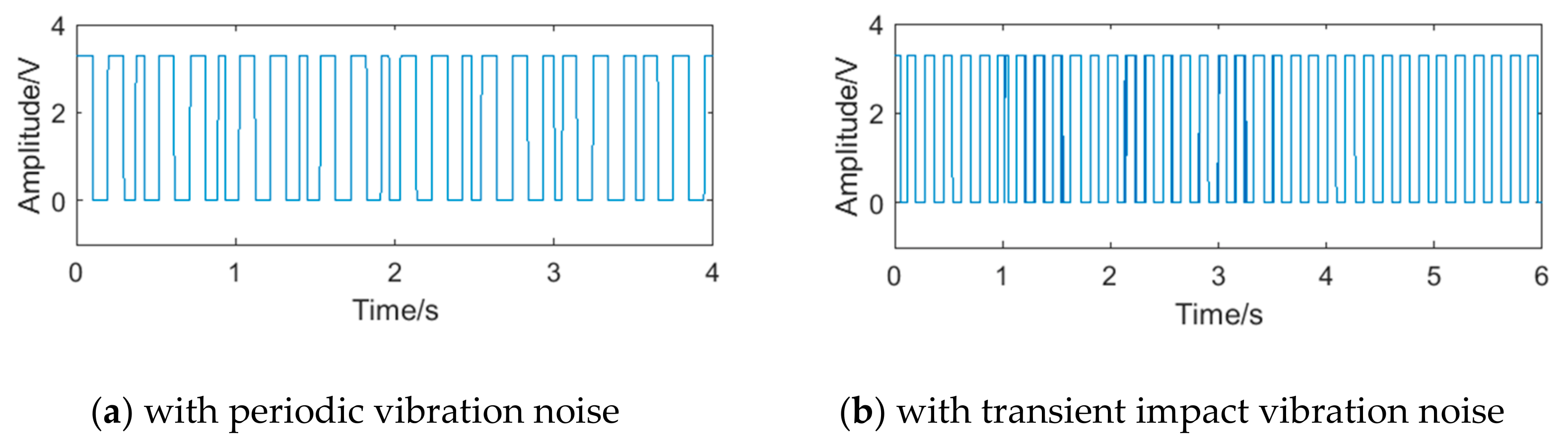
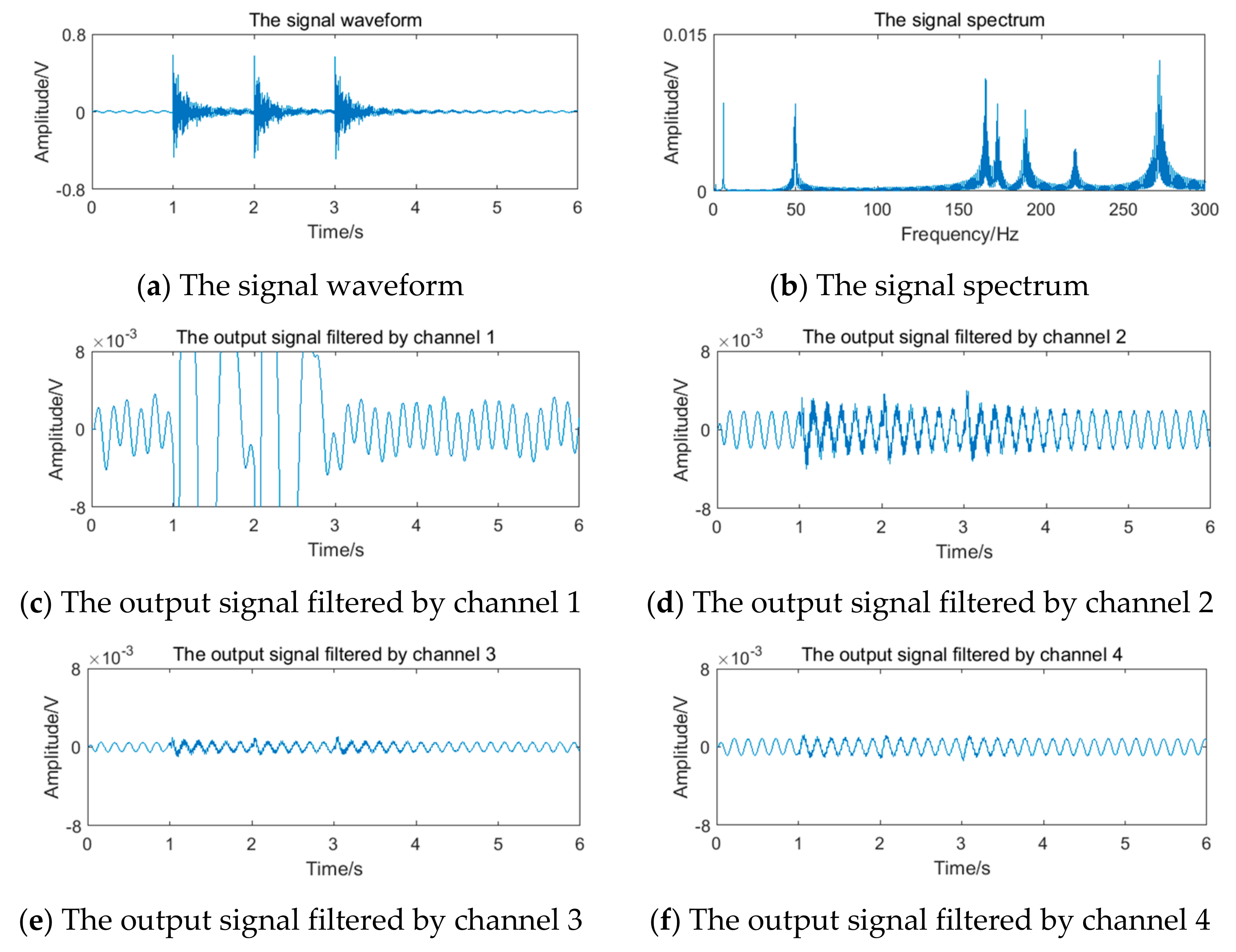
4.3. Anti-Interference Performance
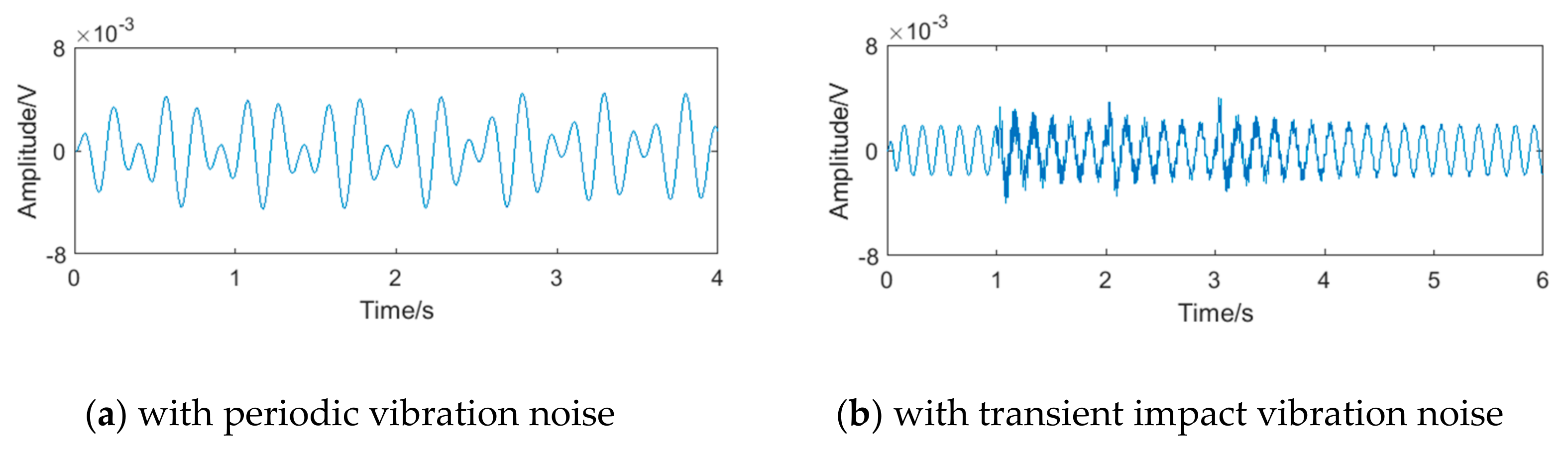
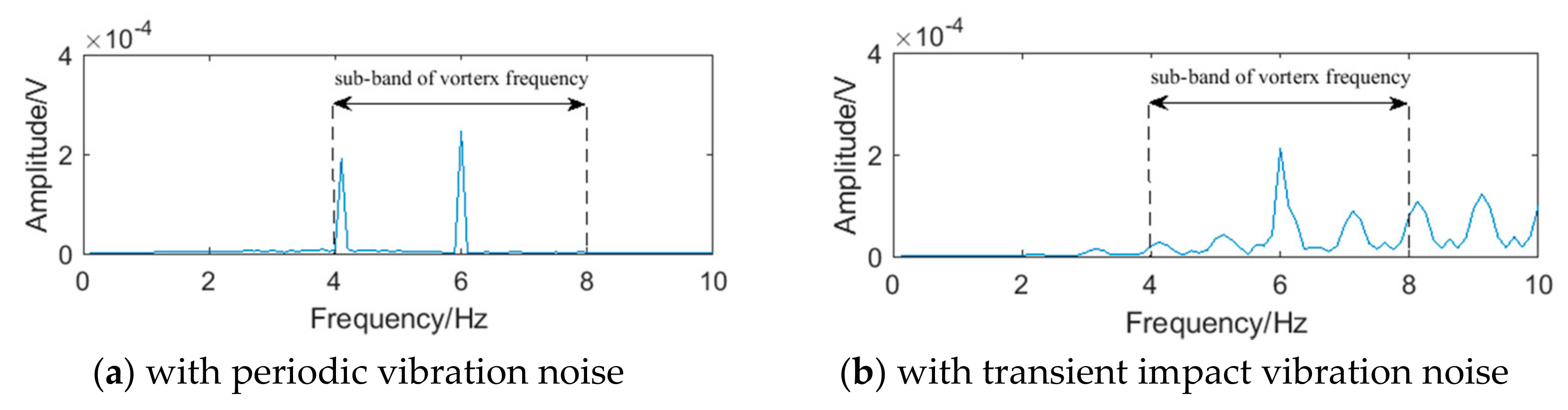
- Including all kinds of possible interference in vortex signal, to truly restore the field measurement environment and verify the anti-interference performance of the system under complex working conditions.
- The periodic vibration noise conforms to the model shown in Equation (15), and the noise frequency and intensity can be changed by adjusting the parameters and respectively.
- The transient impact vibration noise conforms to the model shown in Equations (16) and (17), and the times of noise can be changed by signal superposition.
4.4. Real-Time Performance
5. Experimental Verification
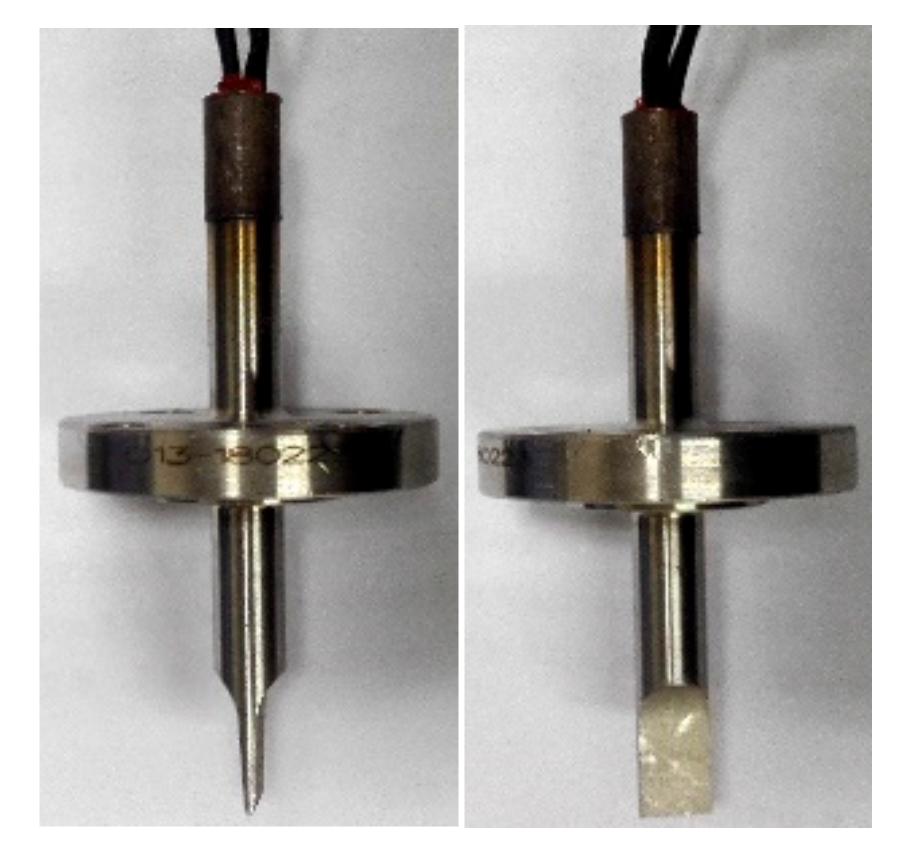
5.1. Anti-Vibration Experiment
5.2. Calibration Experiment
6. Results Discussion
7. Conclusions
- A new central tendency analysis method called the generalized mode algorithm is proposed in this paper. Compared with the traditional mean, median, and mode, the generalized mode is insensitive to outliers. It retains most of the statistical characteristics of the data, which is more suitable for practical application. In addition to being used in the vortex flow meter signal-processing system, the idea of generalized mode can also be used for reference in other signal-processing fields, such as the electromagnetic flow meter signal-processing system.
- A new signal-processing method of vortex flow meter is designed based on the generalized mode algorithm, which avoids the conflict between frequency resolution and real-time performance existing in the FFT spectrum analysis method. Meanwhile, it solves the problem that the filter bank method needs to filter out the noise in the sub-band. Experiments show that the proposed algorithm has good measurement accuracy and anti-interference performance, especially for the interference of strong periodic vibration noise and strong transient impact vibration noise in the sub-band. Under various interference conditions, the absolute value of the relative error of vortex frequency is within 0.87%, as shown in Table 7, Table 8, Table 9 and Table 10.
- The generalized mode method is applied in the vortex flow meter system. The results of the anti-vibration experiments carried out in the 40 mm diameter liquid flow device showed that the generalized mode method performed better than the filter bank method, as shown in Figure 28. The results of the calibration experiments in the 80 mm diameter gas flow device showed that the repeatability of the vortex flow meter designed in this paper is less than 0.14%, as shown in Table 11, which indicates it has good practical application value.
Author Contributions
Funding
Conflicts of Interest
References
- Miau, J.J.; Hu, C.C.; Chou, J.H. Response of a vortex flowmeter to impulsive vibrations. Flow Meas. Instrum. 2000, 11, 41–49. [Google Scholar] [CrossRef]
- Zhang, T.; Sun, H.; Wu, P. Wavelet denoising applied to vortex flowmeters. Flow Meas. Instrum. 2004, 15, 325–329. [Google Scholar] [CrossRef]
- Zheng, D.; Zhang, T.; Xing, J. Improvement of the HHT method and application in weak vortex signal detection. Meas. Sci. Technol. 2007, 18, 2769–2776. [Google Scholar] [CrossRef]
- Chen, J.; Fan, C.; Li, B.; Yin, J.; Liu, X. Novel algorithm of tracking bandpass digital filter with amplitude 1/f^2 attenuation for vortex signal extraction. Flow Meas. Instrum. 2015, 45, 82–92. [Google Scholar] [CrossRef]
- Uchida, S. The pulsating viscous flow superimposed on the steady laminar motion of incompressible fluid in a circular pipe. Z. Angew. Math. Phys. 1956, 7, 403–422. [Google Scholar] [CrossRef]
- Amadi-Echendu, J.E. Identification of Process Plant Signatures Using Flow Measurement Signals for Sensor Validation, Condition Monitoring and Plant Diagnostics. Master’s Thesis, School of Engineering, University of Sussex, Sussex, UK, 1990. [Google Scholar]
- Chen, J.; Li, B.; Dai, G.Y. Vortex Signal Processing Method Based on Flow Momentum. In Proceedings of the 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009. [Google Scholar]
- Ghaoud, T.; Clarke, D.W. Modelling and tracking a vortex flow-meter signal. Flow Meas. Instrum. 2002, 13, 103–117. [Google Scholar] [CrossRef]
- Xu, K.J.; Luo, Q.L.; Wang, G. Frequency-feature based antistrong-disturbance signal processing method and system for vortex flowmeter with single sensor. Rev. Sci. Instrum. 2010, 81, 075104. [Google Scholar] [CrossRef] [PubMed]
- Schlatter, G.L.; Gilbert, L.H. Signal Processing Method and Apparatus for. Flowmeter. Patents WO90/04220, 19 April 1990. [Google Scholar]
- Venugopal, A.; Agrawal, A.; Prabhu, S.V. Note: A vortex cross-correlation flowmeter with enhanced turndown ratio. Rev. Sci. Instrum. 2014, 85, 066109. [Google Scholar] [CrossRef] [PubMed]
- Venugopal, A.; Agrawal, A.; Prabhu, S.V. Performance evaluation of piezoelectric and differential pressure sensor for vortex flowmeters. Measurement 2014, 50, 10–18. [Google Scholar] [CrossRef]
- Du, Y.; Wang, H.; Shi, H.; Liu, H. Wavelet based soft threshold de-noising for vortex flow meter. In Proceedings of the 12th IEEE Instrumentation and Measurement Technology Conference, Singapore, 5–7 May 2009. [Google Scholar]
- Amandi-Echendu, J.E.; Zhu, H.J.; Hingham, E.H. Analysis of signals from vortex flowmeter. Flow Meas. Instrum. 1993, 4, 225–231. [Google Scholar] [CrossRef]
- Zheng, D.; Zhang, T. Research on vortex signal processing based on double-window relaxing notch periodogram. Flow Meas. Instrum. 2008, 19, 85–91. [Google Scholar] [CrossRef]
- Chen, J.; Li, B. FFT Spectral analysis in vortex signal processing. J. Shanghai Univ. Nat. Sci. Ed. 2004, 10, 244–247. [Google Scholar]
- Chen, J.; Cao, Y.; Wang, C.Y.; Li, B. Sparse Fourier transform and amplitude–frequency characteristics analysis of vortex street signal. Meas. Control 2020, 3, 1–8. [Google Scholar] [CrossRef]
- Shao, C.L.; Xu, K.J.; Fang, M. Frequency Variance Based Antistrong Vibration Interference Method for Vortex Flow Sensor. IEEE Trans. Instrum. Meas. 2014, 63, 1566–1582. [Google Scholar] [CrossRef]
- Xu, K.J.; Huang, Y.Z.; Lv, X.H. Power-spectrum-analysis-based signal processing system of vortex flowmeters. IEEE Trans. Instrum. Meas. 2006, 55, 1006–1011. [Google Scholar] [CrossRef]
- Shao, C.L.; Xu, K.J.; Shu, Z.P. A Frequency Correcting Method Combining Bilateral Correction with Weighted Mean for Vortex Flow Sensor Signal. IEEE Trans. Instrum. Meas. 2017, 99, 1–14. [Google Scholar]
- Lin, H.C. Inter-Harmonic Identification Using Group-Harmonic Weighting Approach Based on the FFT. IEEE Trans. Power Electron. 2008, 23, 1309–1319. [Google Scholar]
- Taixin, S.; Mingfa, Y.; Tao, J. Power harmonic and interharmonic detection method in renewable power based on Nuttall double-window all-phase FFT algorithm. IET Renew. Power Gener. 2018, 12, 953–961. [Google Scholar]
- Ghaoud, T.; Clark, W.D. Evaluating a Vortex Flowmeter Signal. U.S. Patent 6915242, 12 July 2005. [Google Scholar]
- Lowell, A.K. Vortex Flowmeter with Measured Parameter Adjustment. U.S. Patent 6658945, 16 December 2003. [Google Scholar]
- Hondoh, M.; Wada, M.; Andoh, T. A Vortex Flowmeter with Spectral Analysis Signal Processing. In Proceedings of the SIcon/01. Sensors for Industry Conference. Proceedings of the First ISA/IEEE. Sensors for Industry Conference (Cat. No.01EX459), Rosemont, IL, USA, 7 November 2001; pp. 35–40. [Google Scholar]
- Chen, J. Research and Realization on Signal Processing Method of Wide Measure Ratio Vortex Flowmeter. Master’s Thesis, Shanghai University, Shanghai, China, 2010. [Google Scholar]
- McCluskey, A.; Lalkhen, A.G. Statistics II: Central tendency and spread of data. Contin. Educ. Anaesth. Crit. Care Pain 2007, 7, 127–130. [Google Scholar] [CrossRef]
- Bakker, A. The early history of mean values and implications for education. J. Stat. Educ. 2003, 11, 1–24. [Google Scholar] [CrossRef]
- Bakker, A.; Gravemeijer, K.P.E. An historical phenomenology of mean and median. Educ. Stud. Math. 2006, 62, 149–168. [Google Scholar] [CrossRef]
- Stigler, S.M. The Seven Pillar of Statistical Wisdom; Harvard University Press: Cambridge, MA, USA, 2016; pp. 749–758. [Google Scholar]
- Bickel, D.R. Robust Estimators of the Mode and Skewness of Continuous Data; Elsevier Science Publishers: Amsterdam, The Netherlands, 2002; pp. 153–163. [Google Scholar]
- Yang, Z.J.; Hong, D.W. DSP Platform of Shock Response Control and Its Implementation. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010. [Google Scholar]
- Shao, C.L.; Xu, K.J.; Fang, M. Feature Patterns Extraction-Based Amplitude/Frequency Modulation Model for Vortex Flow Sensor Output Signal. IEEE Trans. Instrum. Meas. 2015, 64, 3031–3044. [Google Scholar] [CrossRef]
- Givens, G.H. Consistency of the local kernel density estimator. Stat. Probab. Lett. 1995, 25, 55–61. [Google Scholar] [CrossRef]
- Shao, C.L.; Xu, K.J.; Shu, Z.P. Segmented Kalman Filter Based Antistrong Transient Impact Method for Vortex Flowmeter. IEEE Trans. Instrum. Meas. 2017, 99, 1–11. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter (mm) | Frequency Range of Liquid (Hz) | Frequency Range of Gas (Hz) |
|---|---|---|
| 25 | 8.75–270 | 45.00–2650 |
| 32 | 5.00–220 | 32.50–2200 |
| 40 | 2.50–180 | 22.50–1650 |
| 50 | 2.00–140 | 20.00–1400 |
| 65 | 1.75–110 | 15.00–1100 |
| 80 | 1.50–90 | 10.00–850 |
| 100 | 1.25–75 | 7.50–720 |
| 125 | 1.13–58 | 5.75–580 |
| 150 | 0.95–50 | 4.50–460 |
| 200 | 0.80–40 | 3.25–380 |
| 250 | 0.63–31 | 2.75–260 |
| Index | Period (s) | Frequency (Hz) | The Relative Error (%) |
|---|---|---|---|
| Mean | 0.1616 | 6.19 | 4.91 |
| Median | 0.1672 | 5.98 | 1.36 |
| Mode | \ | \ | \ |
| Generalized mode | 0.1697 | 5.89 | –0.1 |
| Flow (L/s) | Frequency (Hz) | Amplitude (mV) |
|---|---|---|
| 2.02 | 5.27 | 7.08 |
| 2.92 | 7.64 | 14.88 |
| 8.99 | 23.48 | 140.55 |
| 11.99 | 31.33 | 250.24 |
| 17.76 | 46.39 | 548.64 |
| 2.02 | 5.27 | 7.08 |
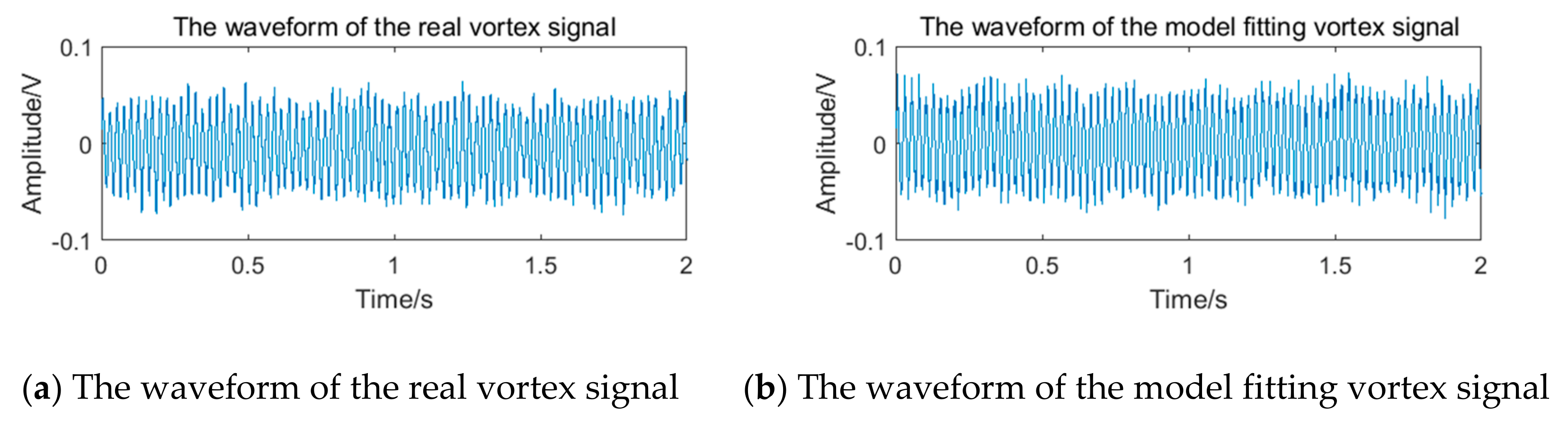
| a1 | b2 | c3 | Degree of Fitting | Ideal Value | 4 | |
|---|---|---|---|---|---|---|
| Amplitude | 62.8 | 0.05249 | 0.00890 | 0.9971 | 0.0515 V | 0.00629 |
| Frequency | 0.1767 | 40.83 | 3.117 | 0.9916 | 40.89 Hz | 2.20405 |
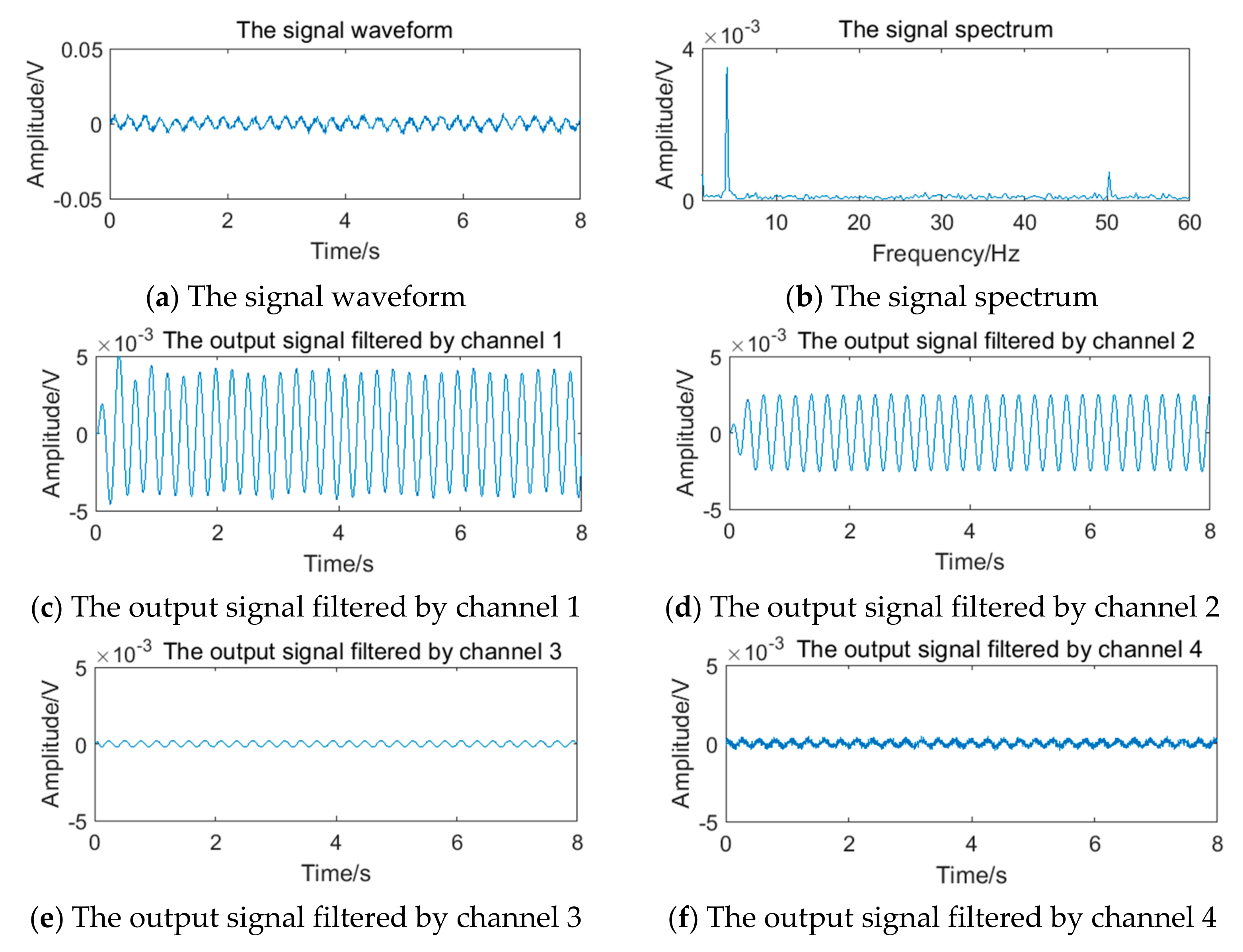
| Channel | Sub-Band | Frequency (Hz) | Amplitude (V) | ||
|---|---|---|---|---|---|
| 1 | 2–4 | 3.77 | 0.0036 | 0.0002 | 0.7653 |
| 2 | 4–8 | 5.90 | 0.0089 | 0.0003 | 0.7538 |
| 3 | 8–16 | 12.69 | 0.0411 | 0.0008 | 0.7931 |
| 4 | 16–140 | 24.64 | 0.1548 | 0.0025 | 1.1434 |
| Frequency Point (Hz) | Channel 1 (2–4 Hz) | Channel 2 (4–8 Hz) | Channel 3 (8–16 Hz) | Channel 4 (16–140 Hz) | Selected Sub-Ban (Hz) |
|---|---|---|---|---|---|
| 3.77 | 3.7500 | 3.7975 | 0.0000 | 0.0000 | 2–4 |
| 5.90 | 5.7391 | 5.8428 | 0.0000 | 0.0000 | 4–8 |
| 12.69 | 4.9485 | 12.2034 | 12.7946 | 12.8142 | 8–16 |
| 24.64 | 5.1173 | 11.8812 | 23.8914 | 24.5629 | 16–140 |
| Frequency Point (Hz) | Relative Error (%) | |||
|---|---|---|---|---|
| [20] | [15] | [4] | Ours | |
| 3.77 | 0.40 | 0.27 | −0.53 | 0.31 |
| 5.90 | 0.34 | 0.13 | −0.97 | −0.17 |
| 12.69 | −0.32 | −0.18 | 0.82 | 0.15 |
| 24.64 | −0.14 | −0.06 | 0.31 | 0.11 |
| Noise Frequency (Hz) | Noise Intensity | Relative Error (%) | |||
|---|---|---|---|---|---|
| [20] | [15] | [4] | Ours | ||
| 4 | Weak | 0.43 | –0.34 | –1.10 | –0.38 |
| Strong | –0.61 | 0.79 | –3.47 | 0.85 | |
| 40 | Weak | –0.19 | –0.15 | –0.28 | 0.17 |
| Strong | 0.58 | 0.35 | 0.44 | –0.25 | |
| Noise Intensity | Noise Times | Relative Error (%) | |||
|---|---|---|---|---|---|
| [20] | [15] | [4] | Ours | ||
| Weak | 1 | 0.31 | 0.17 | –0.57 | –0.18 |
| 2 | –0.37 | 0.35 | 1.06 | 0.21 | |
| 3 | 0.46 | –0.30 | 4.91 | 0.29 | |
| Strong | 1 | >100 | >100 | 2.02 | –0.38 |
| 2 | >100 | >100 | 3.40 | 0.65 | |
| 3 | >100 | >100 | 5.52 | 0.78 | |
| Vortex Signal | Noise Signal | Cycle Number | Relative Error (%) | ||
|---|---|---|---|---|---|
| [20] | [15] | Ours | |||
| Low flow | Out of the sub-band | 40 | 0.00 | 0.00 | 0.00 |
| 20 | 0.00 | 0.00 | 0.00 | ||
| 10 | 0.00 | 0.02 | 0.00 | ||
| 5 | 0.11 | −0.15 | 0.00 | ||
| 3 | −1.69 | −2.04 | −0.23 | ||
| Low flow | In the sub-band | 40 | 0.00 | 0.00 | 0.00 |
| 20 | 0.00 | 0.00 | 0.01 | ||
| 10 | 0.00 | −0.03 | −0.12 | ||
| 5 | 0.64 | 0.96 | 0.52 | ||
| 3 | 4.78 | 5.21 | −0.72 | ||
| High flow | Out of the sub-band | 40 | 0.00 | 0.00 | 0.00 |
| 20 | 0.00 | 0.00 | 0.00 | ||
| 10 | 0.01 | 0.00 | 0.02 | ||
| 5 | −0.15 | −0.19 | −0.08 | ||
| 3 | 0.25 | 0.37 | −0.10 | ||
| High flow | In the sub-band | 40 | 0.00 | 0.00 | 0.00 |
| 20 | 0.00 | 0.00 | 0.00 | ||
| 10 | −0.01 | −0.05 | 0.01 | ||
| 5 | 0.98 | 0.31 | −0.20 | ||
| 3 | −3.01 | −4.49 | 0.87 | ||
| Location of the Flow Detection (m3/h) | Testing Time (s) | Total Pulse (Pulse) | Mean Frequency (Hz) | Standard Values (m3/h) | K Factor 1 (1/L) | Mean Coefficient (1/L) | Repeatability Error (%) |
|---|---|---|---|---|---|---|---|
| 63 | 60.000 | 2412 | 40.200 | 63.457 | 2.2806 | 2.2772 | 0.13 |
| 59.000 | 2366 | 40.102 | 63.457 | 2.2749 | |||
| 59.000 | 2367 | 40.119 | 63.457 | 2.2761 | |||
| 143 | 59.000 | 5338 | 90.475 | 143.191 | 2.2749 | 2.2763 | 0.09 |
| 60.000 | 5438 | 90.633 | 143.194 | 2.2786 | |||
| 59.000 | 5340 | 90.508 | 143.189 | 2.2753 | |||
| 302 | 60.000 | 11420 | 190.333 | 301.992 | 2.2689 | 2.2712 | 0.14 |
| 59.000 | 11260 | 190.847 | 301.992 | 2.2750 | |||
| 60.000 | 11424 | 190.400 | 301.985 | 2.2698 | |||
| 548 | 59.000 | 20375 | 345.339 | 547.679 | 2.2699 | 2.2676 | 0.11 |
| 59.000 | 20355 | 345.000 | 547.679 | 2.2678 | |||
| 59.000 | 20331 | 344.593 | 547.676 | 2.2651 | |||
| 695 | 59.000 | 25665 | 435.000 | 694.701 | 2.2542 | 2.2570 | 0.12 |
| 60.000 | 25704 | 428.400 | 694.722 | 2.2576 | |||
| 59.000 | 26160 | 443.390 | 694.723 | 2.2593 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Wang, C.; Chen, J. A Frequency-Correcting Method for a Vortex Flow Sensor Signal Based on a Central Tendency. Sensors 2020, 20, 5379. https://doi.org/10.3390/s20185379
Li B, Wang C, Chen J. A Frequency-Correcting Method for a Vortex Flow Sensor Signal Based on a Central Tendency. Sensors. 2020; 20(18):5379. https://doi.org/10.3390/s20185379
Chicago/Turabian StyleLi, Bin, Chengyi Wang, and Jie Chen. 2020. "A Frequency-Correcting Method for a Vortex Flow Sensor Signal Based on a Central Tendency" Sensors 20, no. 18: 5379. https://doi.org/10.3390/s20185379
APA StyleLi, B., Wang, C., & Chen, J. (2020). A Frequency-Correcting Method for a Vortex Flow Sensor Signal Based on a Central Tendency. Sensors, 20(18), 5379. https://doi.org/10.3390/s20185379