Iterative K-Closest Point Algorithms for Colored Point Cloud Registration



Abstract
1. Introduction
2. Related Work
3. Iterative -Closest Point Algorithms
3.1. Iterative K-Closest Point Algorithm for Pose Refinement
| Algorithm 1: Iterative K-closest point algorithm for pose refinement. |
 |
3.2. Iterative K-Closest Point Algorithm for Depth Refinement
| Algorithm 2: Iterative K-closest point algorithm for depth refinement. |
 |
4. Multi-View Point-Cloud Registration
| Algorithm 3: Multi-view point cloud merging algorithm. |
 |
| Algorithm 4: Multi-view depth refinement algorithm. |
 |
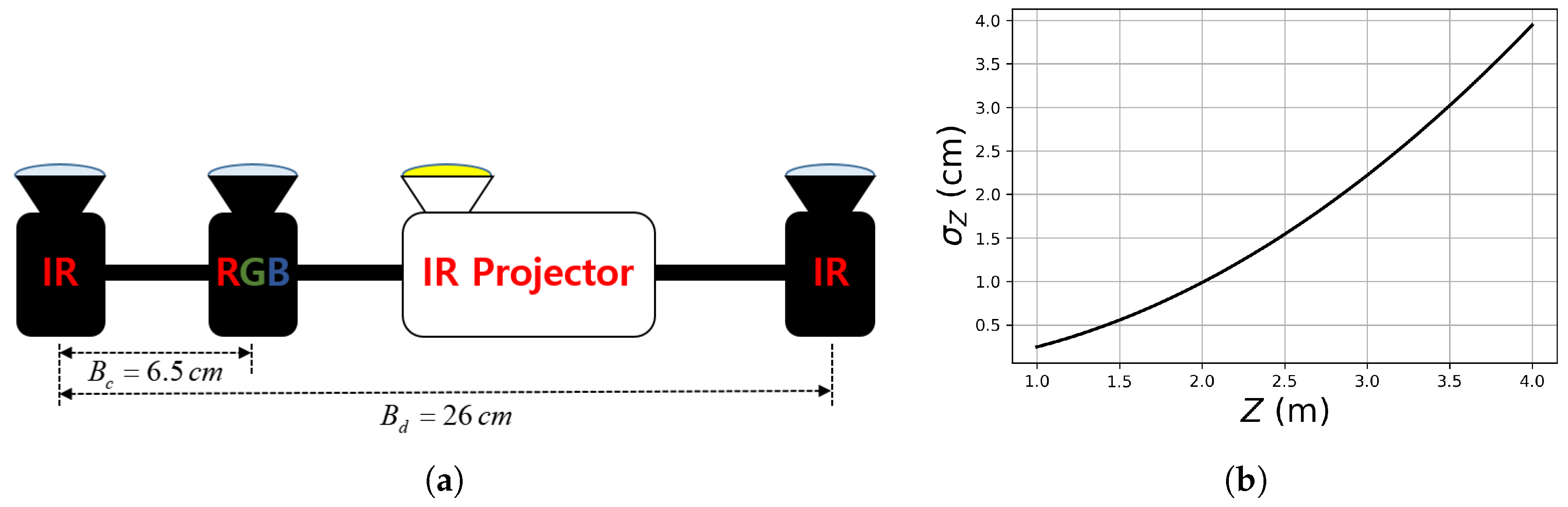
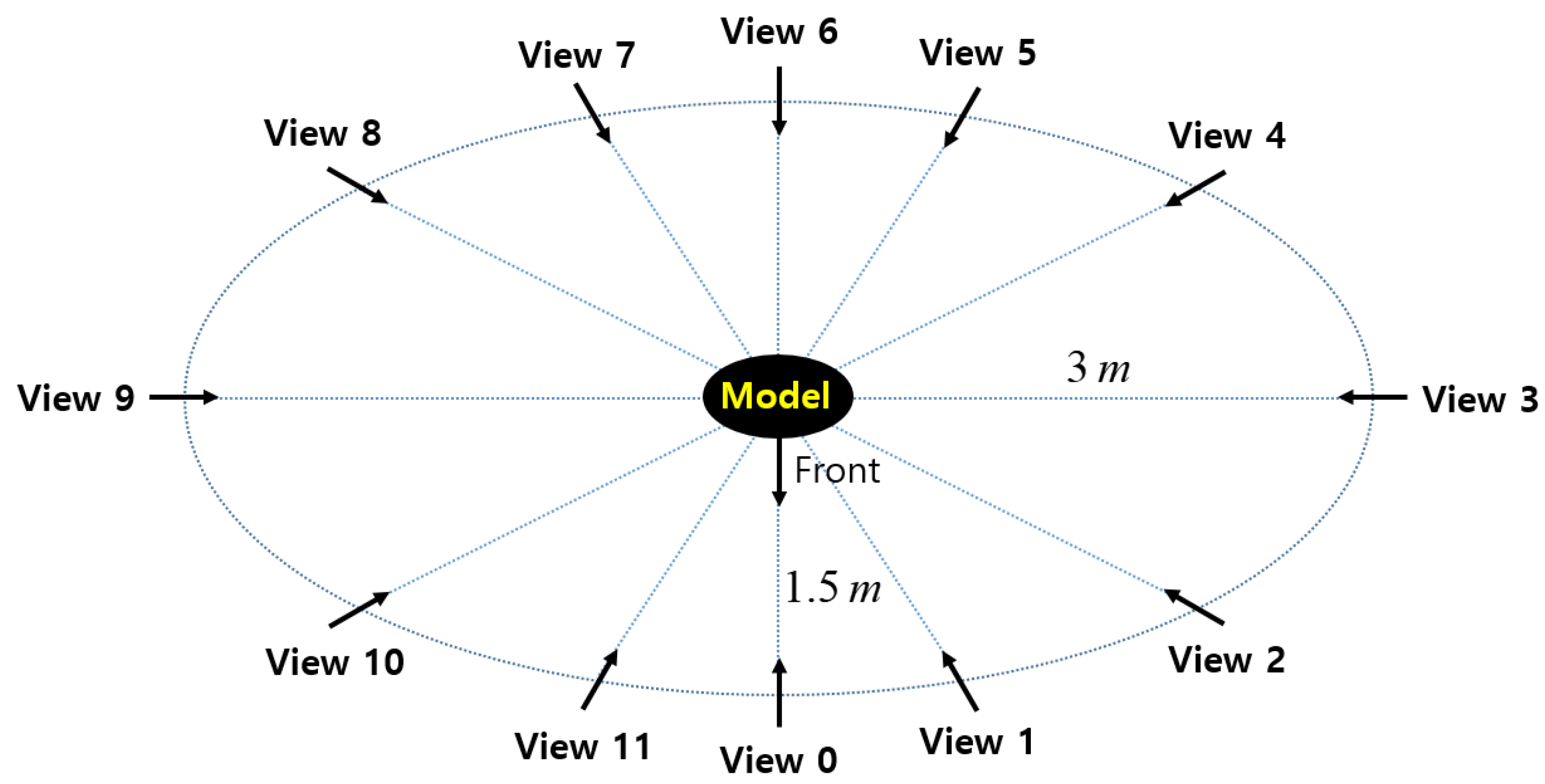
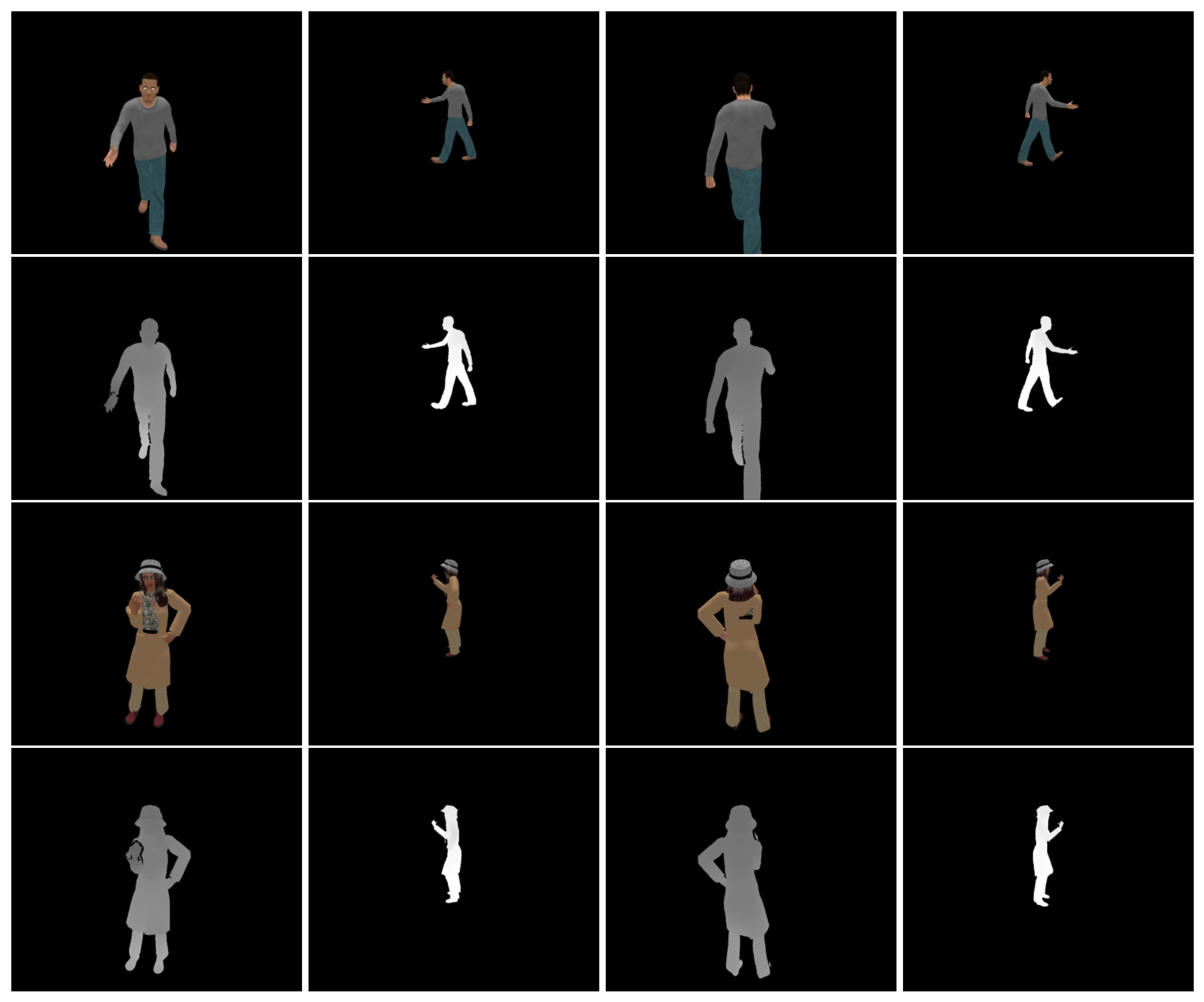
5. Synthetic Multi-View RGB-D Dataset
6. Results
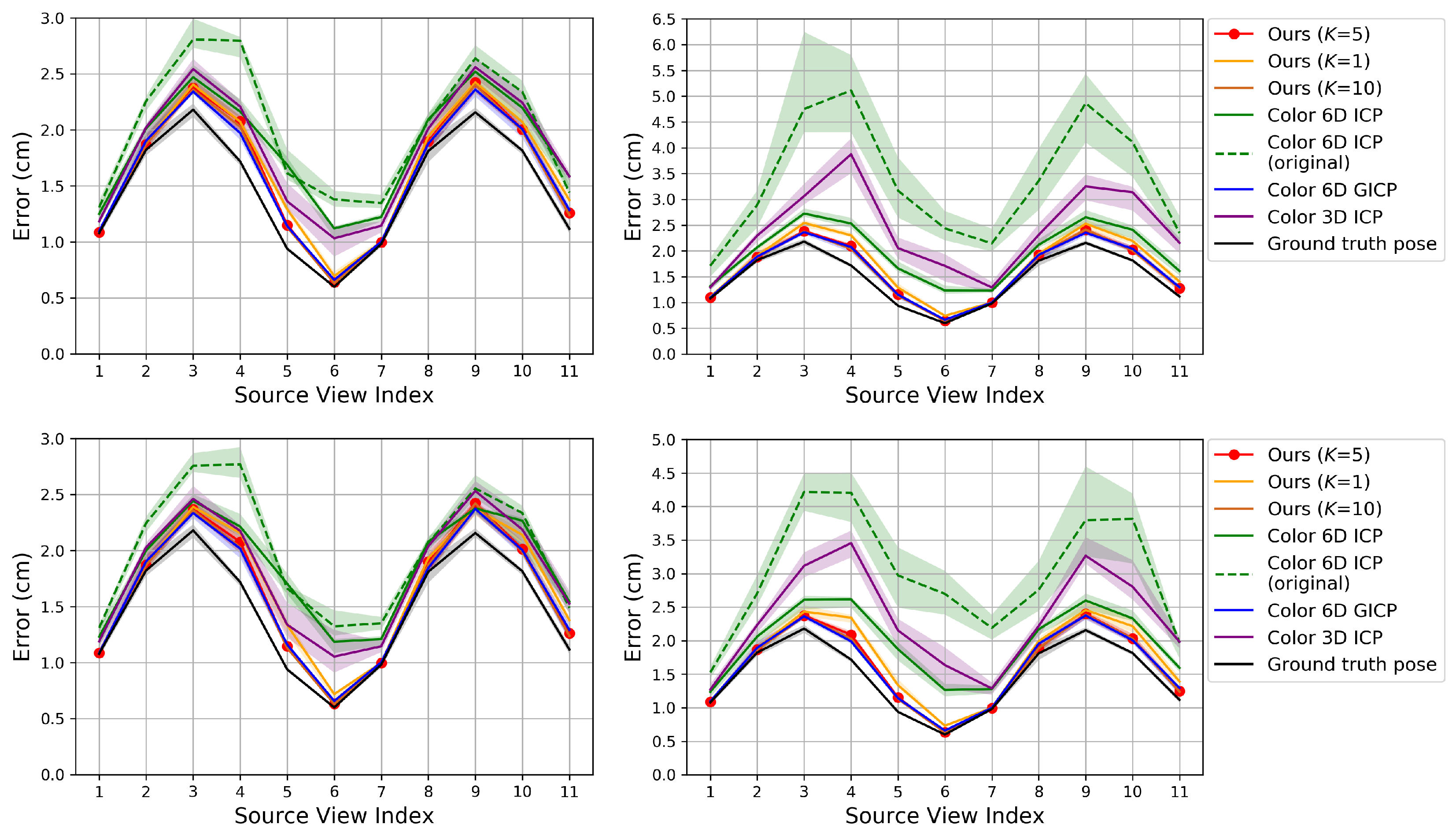
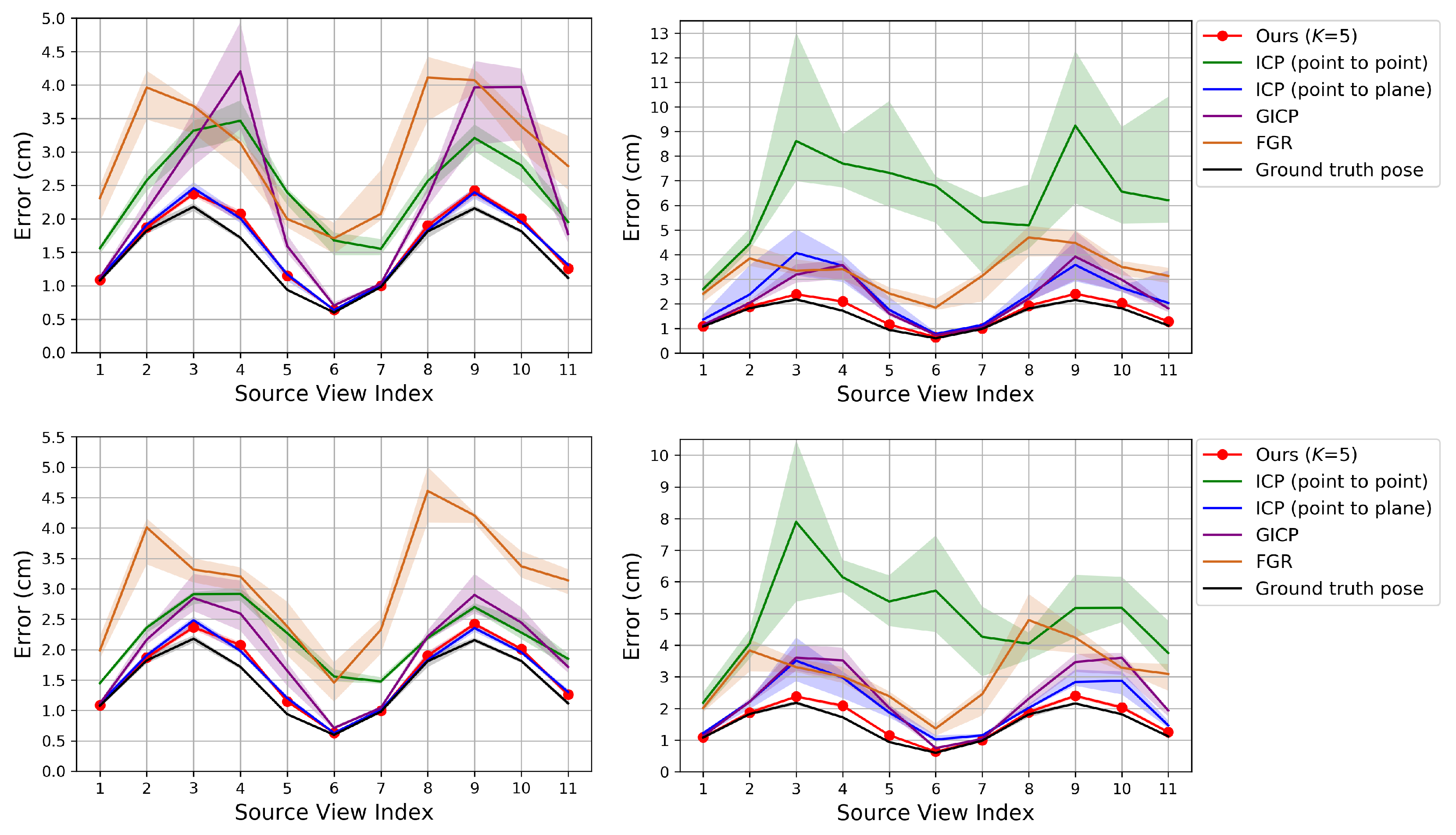
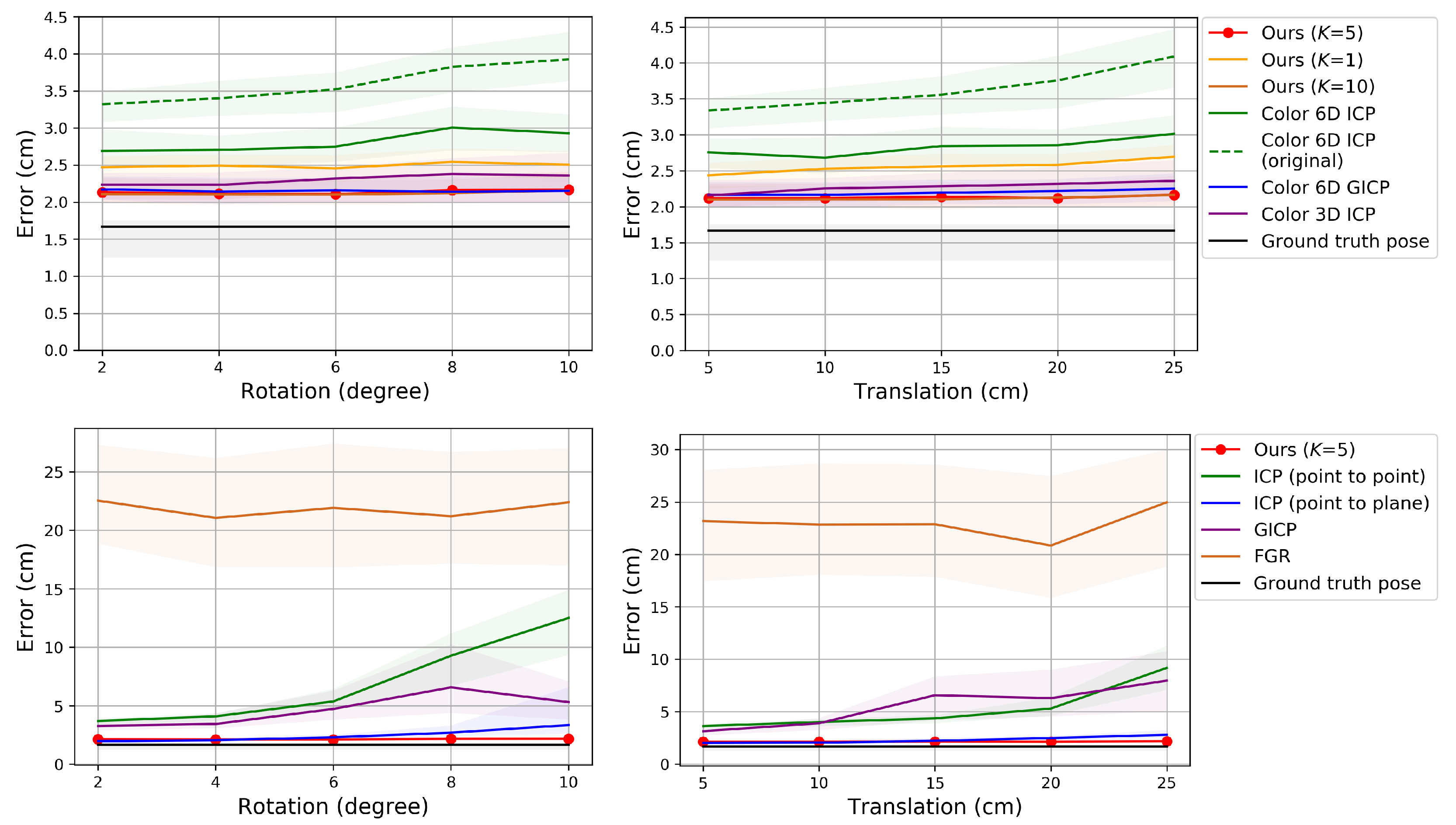
6.1. Pairwise Pose Estimation
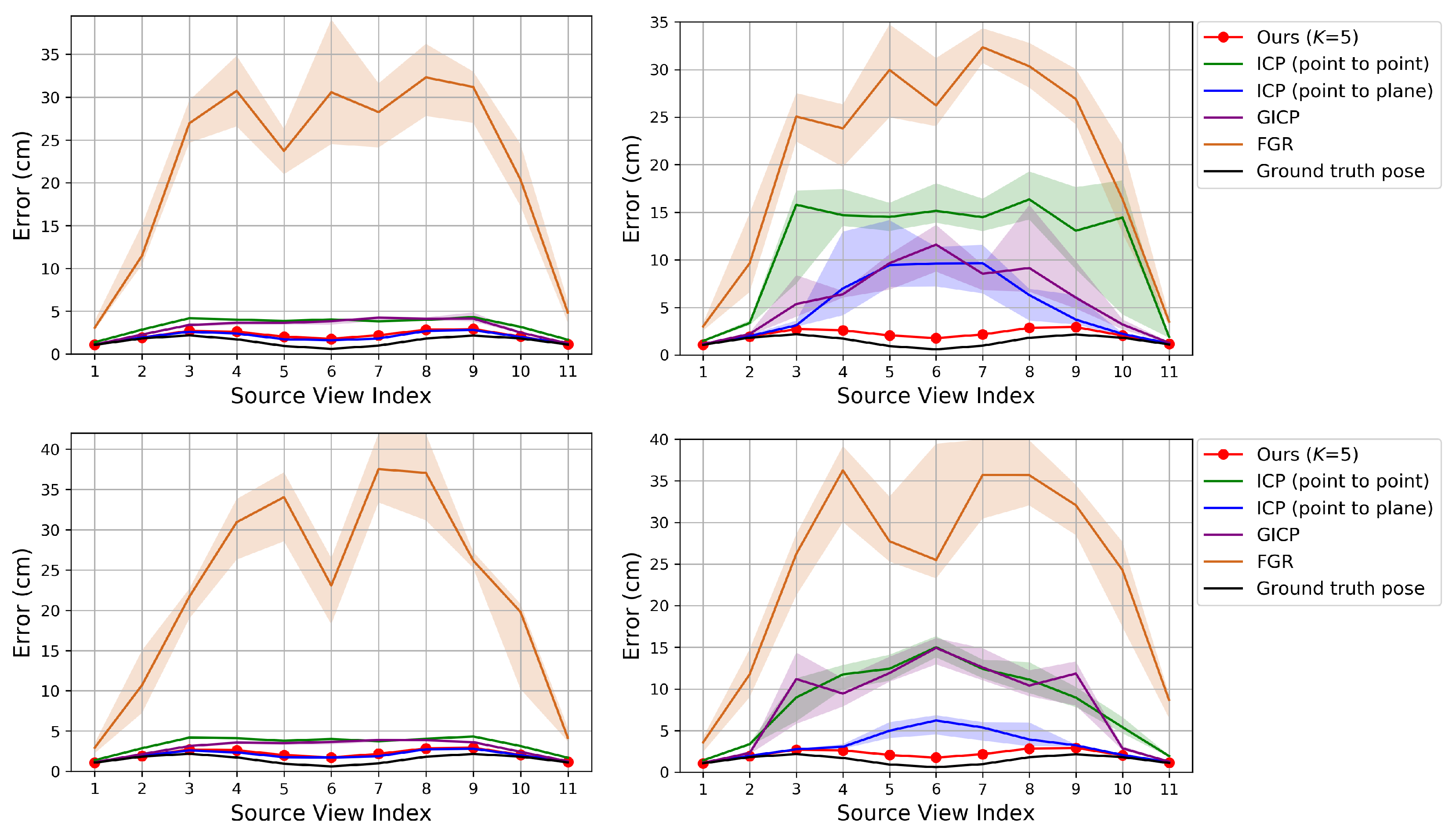
6.2. Multi-View Point Cloud Registration
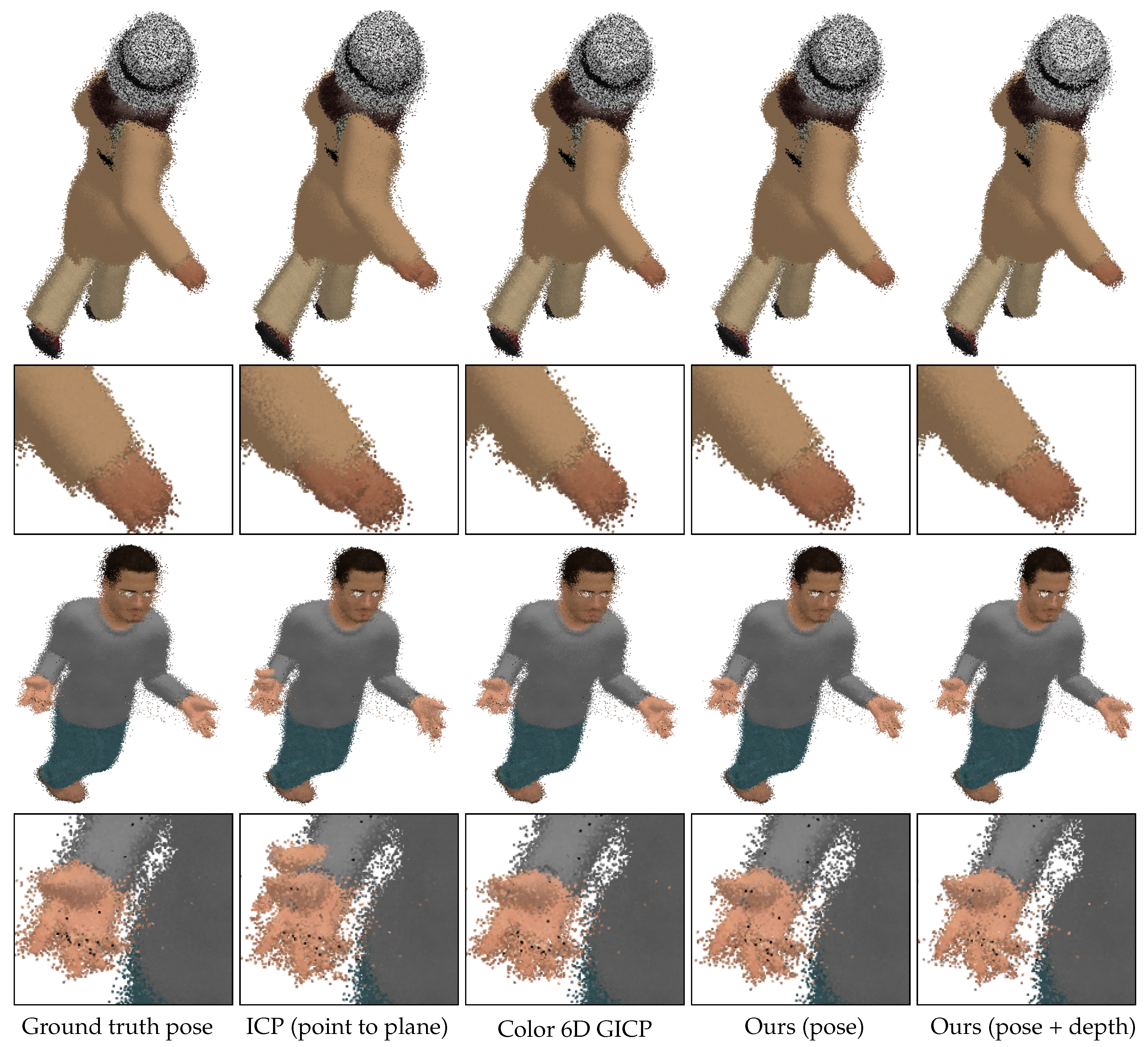
6.3. Application to a Real-World Dataset
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ICP | Iterative Closest Point |
| RGB-D | Red Green Blue—Depth |
| IR | Infrared |
| GICP | Generalized ICP |
| RMSE | Root Mean Square Error |
References
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Real-time dense surface mapping and tracking. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Whelan, T.; Johannsson, H.; Kaess, M.; Leonard, J.J.; McDonald, J. Robust real-time visual odometry for dense RGB-D mapping. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5724–5731. [Google Scholar]
- Yang, R.S.; Chan, Y.H.; Gong, R.; Nguyen, M.; Strozzi, A.G.; Delmas, P.; Gimel’farb, G.; Ababou, R. Multi-Kinect scene reconstruction: Calibration and depth inconsistencies. In Proceedings of the International Conference on Image and Vision Computing New Zealand, Wellington, New Zealand, 27–29 November 2013; pp. 47–52. [Google Scholar]
- Li, W.; Xiao, X.; Hahn, J. 3D reconstruction and texture optimization using a sparse set of RGB-D cameras. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Waikoloa Village, HI, USA, 7–11 January 2019; pp. 1413–1422. [Google Scholar]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G.G. Object modeling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Image Vis. Comput. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Johnson, A.E.; Kang, S.B. Registration and integration of textured 3D data. Image Vis. Comput. 1999, 17, 135–147. [Google Scholar] [CrossRef]
- Men, H.; Gebre, B.; Pochiraju, K. Color point cloud registration with 4D ICP algorithm. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1511–1516. [Google Scholar]
- Korn, M.; Holzkothen, M.; Pauli, J. Color supported generalized-ICP. In Proceedings of the International Conference on Computer Vision Theory and Applications, Lisbon, Portugal, 5–8 January 2014; Volume 3, pp. 592–599. [Google Scholar]
- Chui, H.; Rangarajan, A. A feature registration framework using mixture models. In Proceedings of the IEEE Workshop on Mathematical Methods in Biomedical Image Analysis, Hilton Head Island, SC, USA, 12 June 2000; pp. 190–197. [Google Scholar]
- Granger, S.; Pennec, X. Multi-scale EM-ICP: A fast and robust approach for surface registration. In Proceedings of the European Conference on Computer Vision, Copenhagen, Denmark, 28–31 May 2002; pp. 418–432. [Google Scholar]
- Segal, A.; Hähnel, D.; Thrun, S. Generalized-ICP. In Robotics: Science and Systems; Trinkle, J., Matsuoka, Y., Castellanos, J.A., Eds.; The MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Hansard, M.; Lee, S.; Choi, O.; Horaud, R.P. Time of Flight Cameras: Principles, Methods, and Applications; Springer Briefs in Computer Science; Springer: Berlin, Germany, 2012. [Google Scholar]
- Choi, O.; Kang, B. Denoising of Time-of-Flight depth data via iteratively reweighted least squares minimization. In Proceedings of the IEEE International Conference on Image Processing, Melbourne, VIC, Australia, 15–18 September 2013; pp. 1075–1079. [Google Scholar]
- Mallick, T.; Das, P.P.; Majumdar, A.K. Characterizations of noise in Kinect depth images: A review. IEEE Sens. J. 2014, 14, 1731–1740. [Google Scholar] [CrossRef]
- Zhu, H.; Su, H.; Wang, P.; Cao, X.; Yang, R. View extrapolation of human body from a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4450–4459. [Google Scholar]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points congruent sets for robust surface registration. ACM Trans. Graphics 2008, 85, 1–10. [Google Scholar] [CrossRef]
- Mellado, N.; Mitra, N.J.; Aiger, D. Super 4PCS Fast global pointcloud registration via smart indexing. Comput. Graphics Forum 2014, 33, 205–215. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.Y.; Park, J.; Koltun, V. Fast global registration. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 766–782. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Park, J.; Zhou, Q.; Koltun, V. Colored point cloud registration revisited. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 143–152. [Google Scholar]
- Fitzgibbon, A.W. Robust registration of 2D and 3D point sets. Image Vis. Comput. 2003, 21, 1145–1153. [Google Scholar] [CrossRef]
- Bouaziz, S.; Tagliasacchi, A.; Pauly, M. Sparse iterative closest point. Comput. Graphics Forum 2013, 32, 113–123. [Google Scholar] [CrossRef]
- Montesano, L.; Minguez, J.; Montano, L. Probabilistic scan matching for motion estimation in unstructured environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3499–3504. [Google Scholar]
- Maneewongvatana, S.; Mount, D.M. Analysis of approximate nearest neighbor searching with clustered point sets. In Data Structures, Near Neighbor Searches, and Methodology: Fifth and Sixth DIMACS Implementation Challenges, Proceedings of the DIMACS Workshop, Piscataway, NJ, USA, 25–30 July 1999; DIMACS Series in Discrete Mathematics and Theoretical Computer Science; Goldwasser, M.H., Johnson, D.S., McGeoch, C.C., Eds.; The American Mathematical Society: Providence, RI, USA, 1999; Volume 59, pp. 105–123. [Google Scholar]
- Maier-Hein, L.; Franz, A.M.; dos Santos, T.R.; Schmidt, M.; Fangerau, M.; Meinzer, H.; Fitzpatrick, J.M. Convergent iterative closest-point algorithm to accomodate anisotropic and inhomogenous localization error. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1520–1532. [Google Scholar] [CrossRef] [PubMed]
- Sinha, A.; Billings, S.D.; Reiter, A.; Liu, X.; Ishii, M.; Hager, G.D.; Taylor, R.H. The deformable most-likely-point paradigm. Med. Image Anal. 2019, 55, 148–164. [Google Scholar] [CrossRef] [PubMed]
- Amberg, B.; Romdhani, S.; Vetter, T. Optimal step nonrigid ICP algorithms for surface registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Myronenko, A.; Song, X. Point set registration: Coherent point drift. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2262–2275. [Google Scholar] [CrossRef] [PubMed]
- Cootes, T.; Taylor, C.; Cooper, D.; Graham, J. Active Shape Models-Their Training and Application. Comput. Vis. Image Underst. 1995, 61, 38–59. [Google Scholar] [CrossRef]
- Kwon, Y.C.; Jang, J.W.; Hwang, Y.; Choi, O. Multi-cue-based circle detection and its application to robust extrinsic calibration of RGB-D cameras. Sensors 2019, 19, 1539. [Google Scholar] [CrossRef] [PubMed]
- Billings, S.D.; Boctor, E.M.; Taylor, R.H. Computation of a probabilistic statistical shape model in a maximum-a-posteriori framework. PLoS ONE 2015, 10, e0117688. [Google Scholar]
- Sorkine, O.; Alexa, M. As-rigid-as-possible surface modeling. In Proceedings of the EUROGRAPHICS/ACM SIGGRAPH Symposium on Geometry Processing, Barcelona, Spain, 4–6 July 2007; pp. 109–116. [Google Scholar]
- Choi, S.; Zhou, Q.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5556–5565. [Google Scholar]
- Zhou, Q.Y.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar]
- Bleyer, M.; Rhemann, C.; Rother, C. PatchMatch stereo - Stereo matching with slanted support windows. In Proceedings of the British Machine Vision Conference, Dundee, UK, 29 August–2 September 2011; pp. 14.1–14.11. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ours (K = 10) | 47.33 |
| Ours (K = 5) | 33.34 |
| Ours (K = 1) | 17.92 |
| GICP | 16.49 |
| Color 6D GICP | 15.20 |
| Color 6D ICP | 1.20 |
| Color 6D ICP (original) | 8.68 |
| ICP (point to plane) | 0.89 |
| ICP (point to point) | 0.86 |
| Color 3D ICP | 0.38 |
| FGR | 0.07 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, O.; Park, M.-G.; Hwang, Y. Iterative K-Closest Point Algorithms for Colored Point Cloud Registration. Sensors 2020, 20, 5331. https://doi.org/10.3390/s20185331
Choi O, Park M-G, Hwang Y. Iterative K-Closest Point Algorithms for Colored Point Cloud Registration. Sensors. 2020; 20(18):5331. https://doi.org/10.3390/s20185331
Chicago/Turabian StyleChoi, Ouk, Min-Gyu Park, and Youngbae Hwang. 2020. "Iterative K-Closest Point Algorithms for Colored Point Cloud Registration" Sensors 20, no. 18: 5331. https://doi.org/10.3390/s20185331
APA StyleChoi, O., Park, M.-G., & Hwang, Y. (2020). Iterative K-Closest Point Algorithms for Colored Point Cloud Registration. Sensors, 20(18), 5331. https://doi.org/10.3390/s20185331