Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios




Abstract
1. Introduction
2. Related Work
3. Batteryless LPN Design
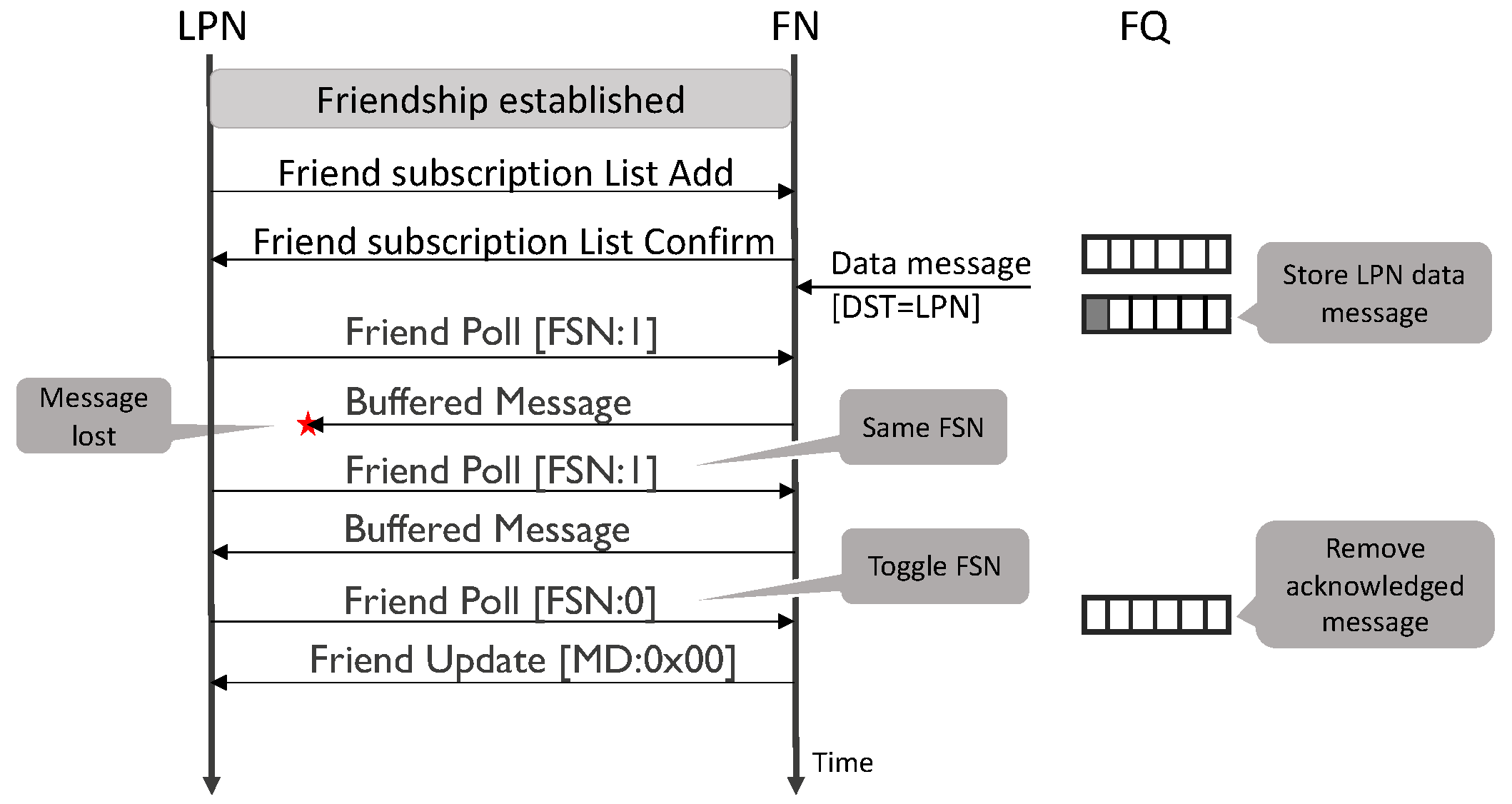
3.1. BLE Friendship Feature
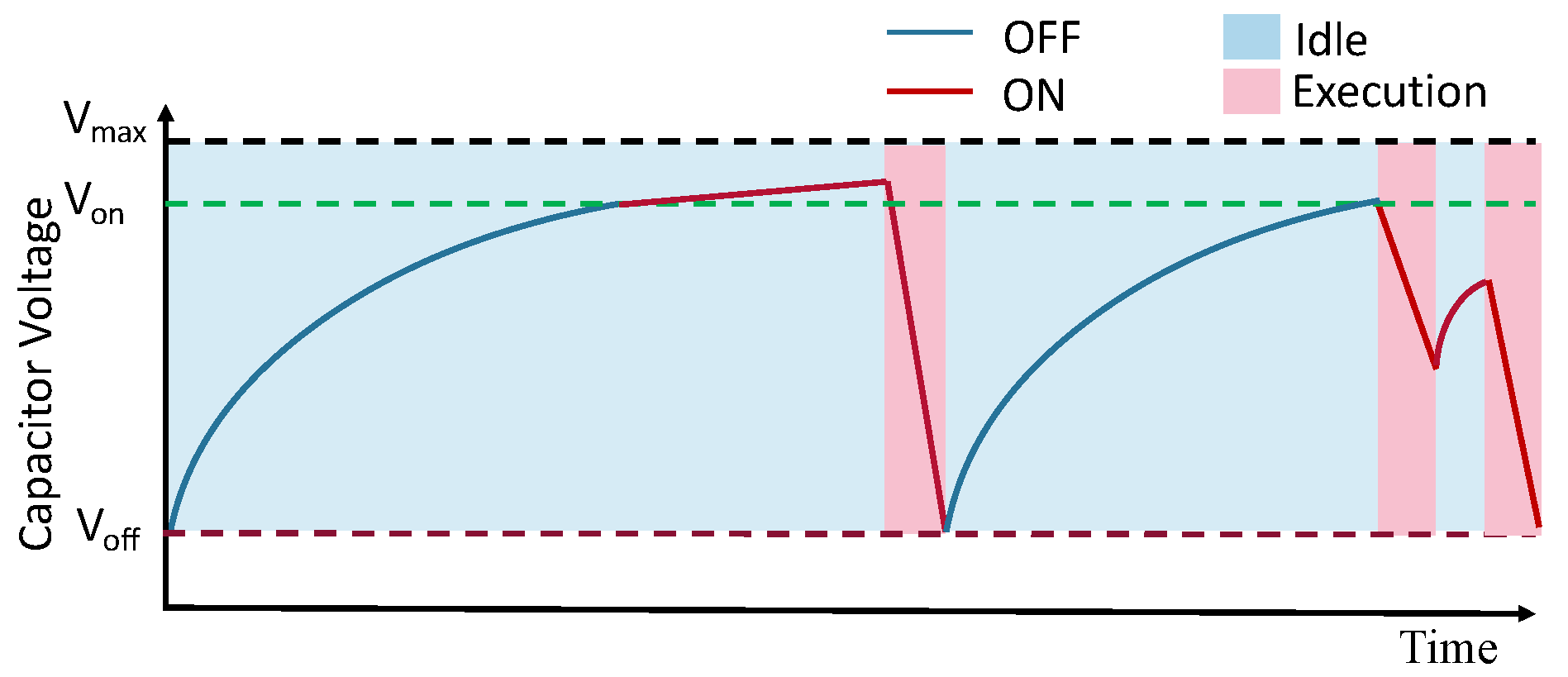
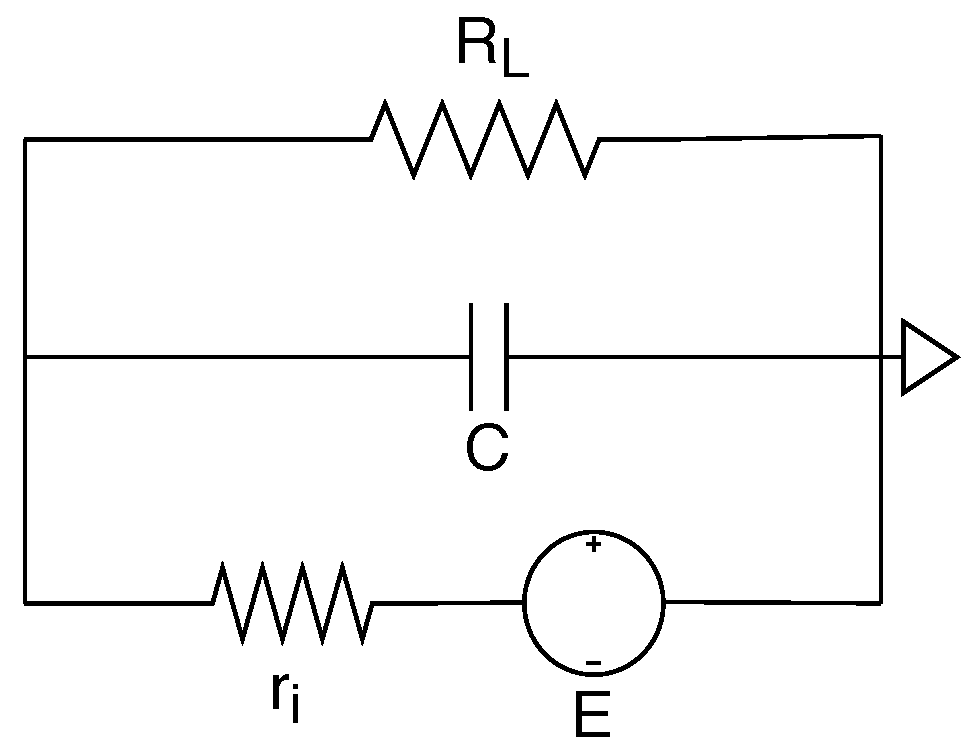
3.2. Batteryless Device Model
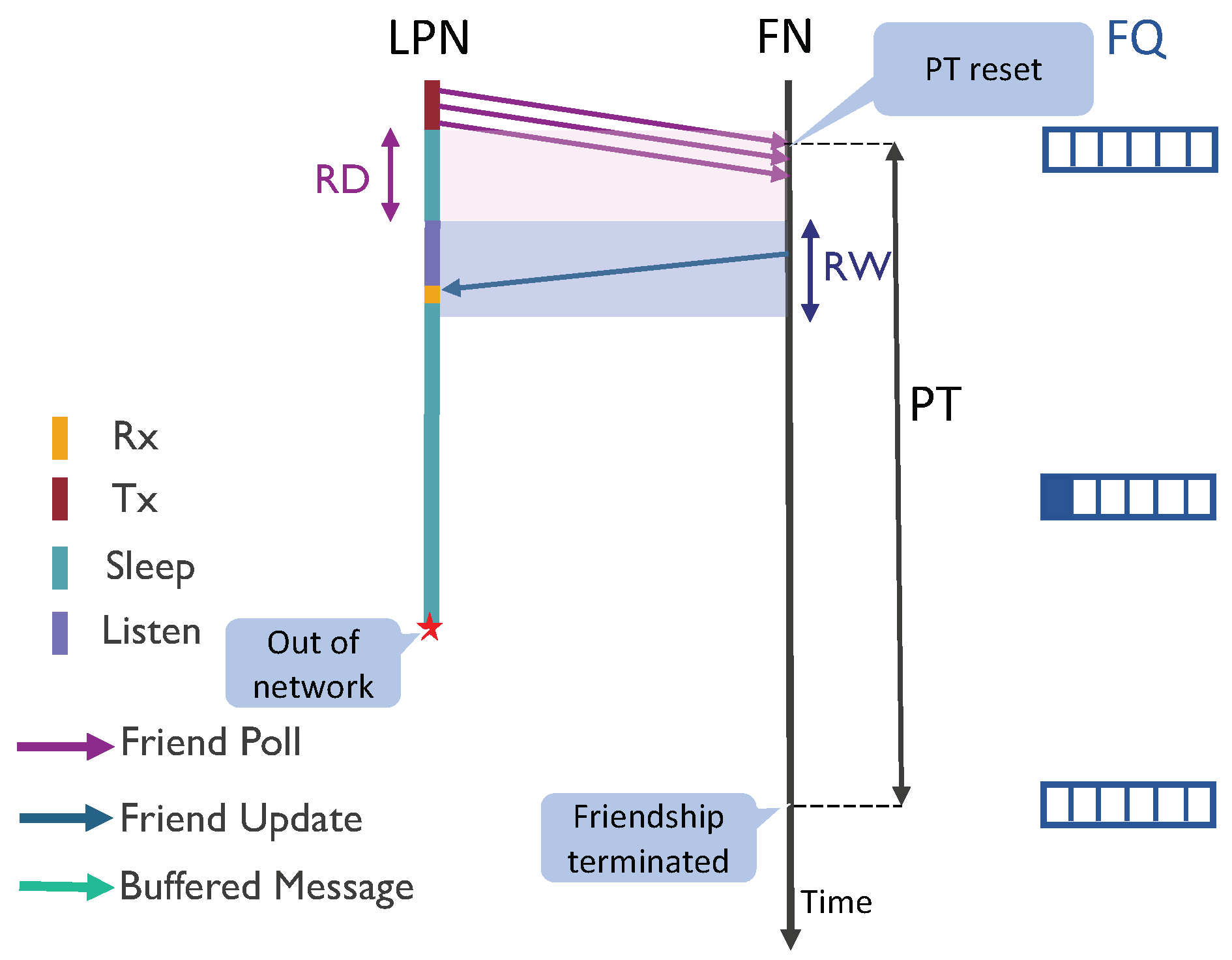
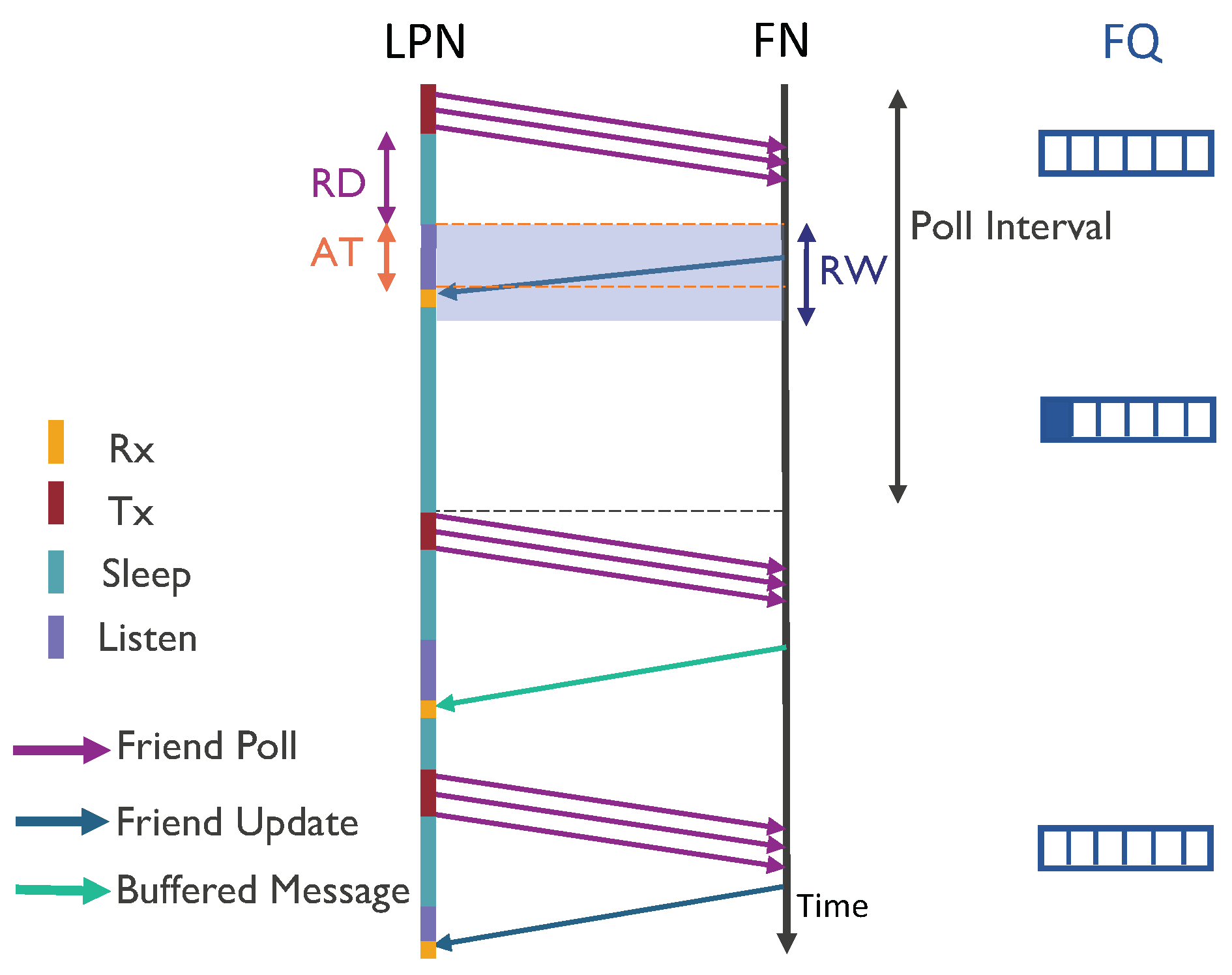
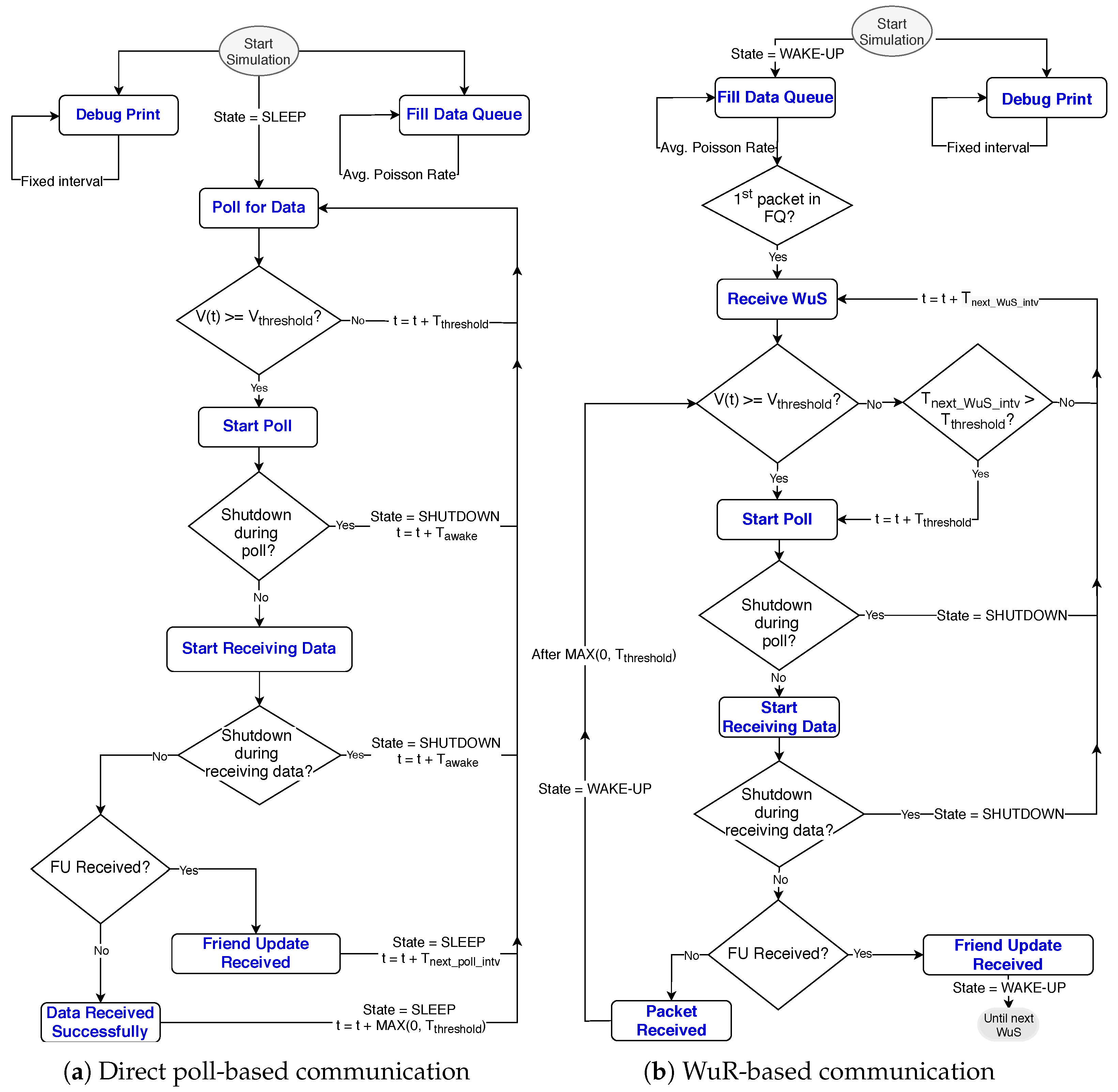
3.3. Poll-Based LPN
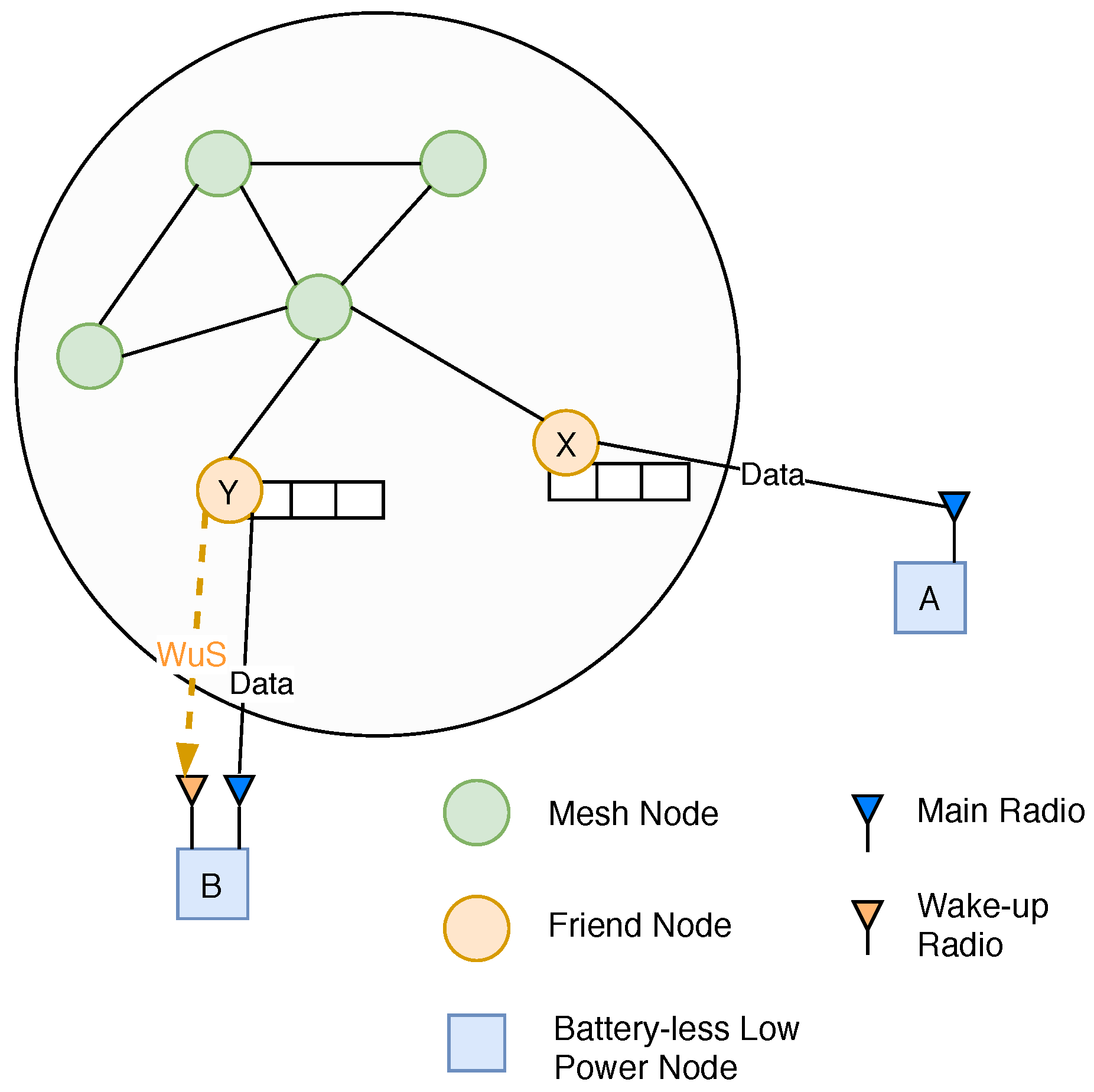
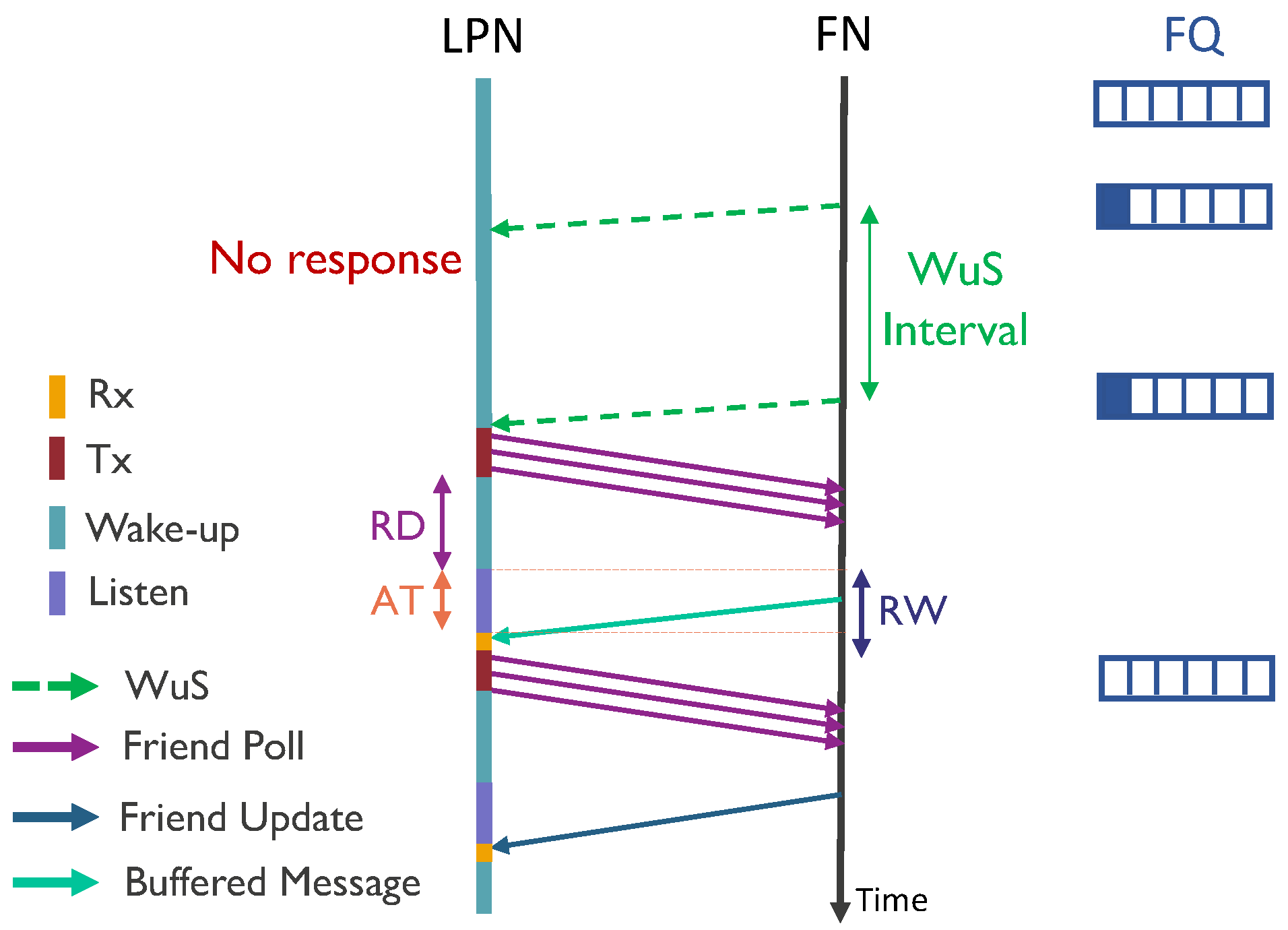
3.4. WuR-Based LPN
4. Results and System Analysis
4.1. Simulation Setup
- Packet delivery ratio (PDR): The ratio of packets successfully received by the LPN compared to the total reaching the FQ.
- Downlink packet latency: The average latency to receive a packet by the LPN from the time it arrives at the FQ.
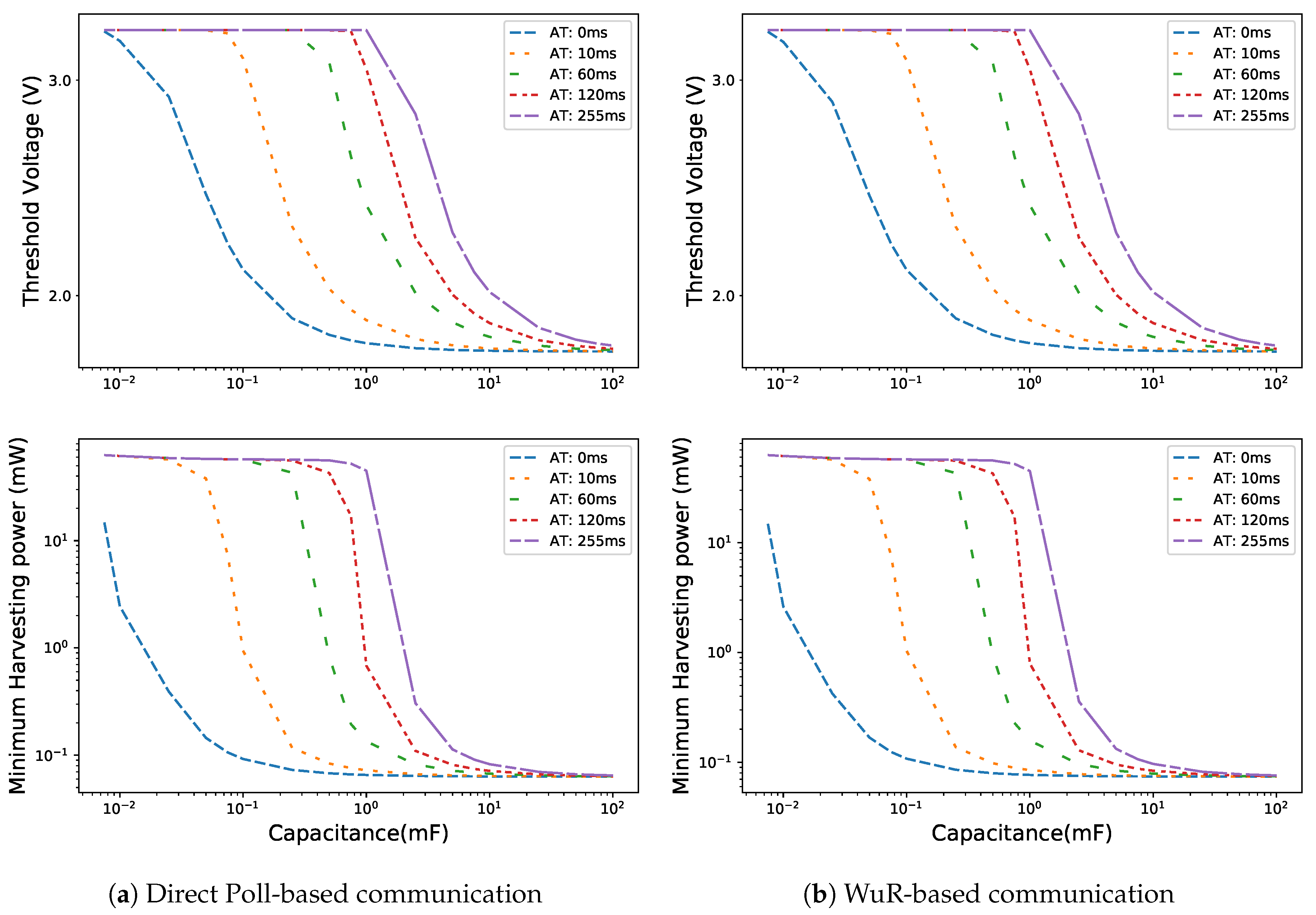
4.2. Minimum Harvesting Power
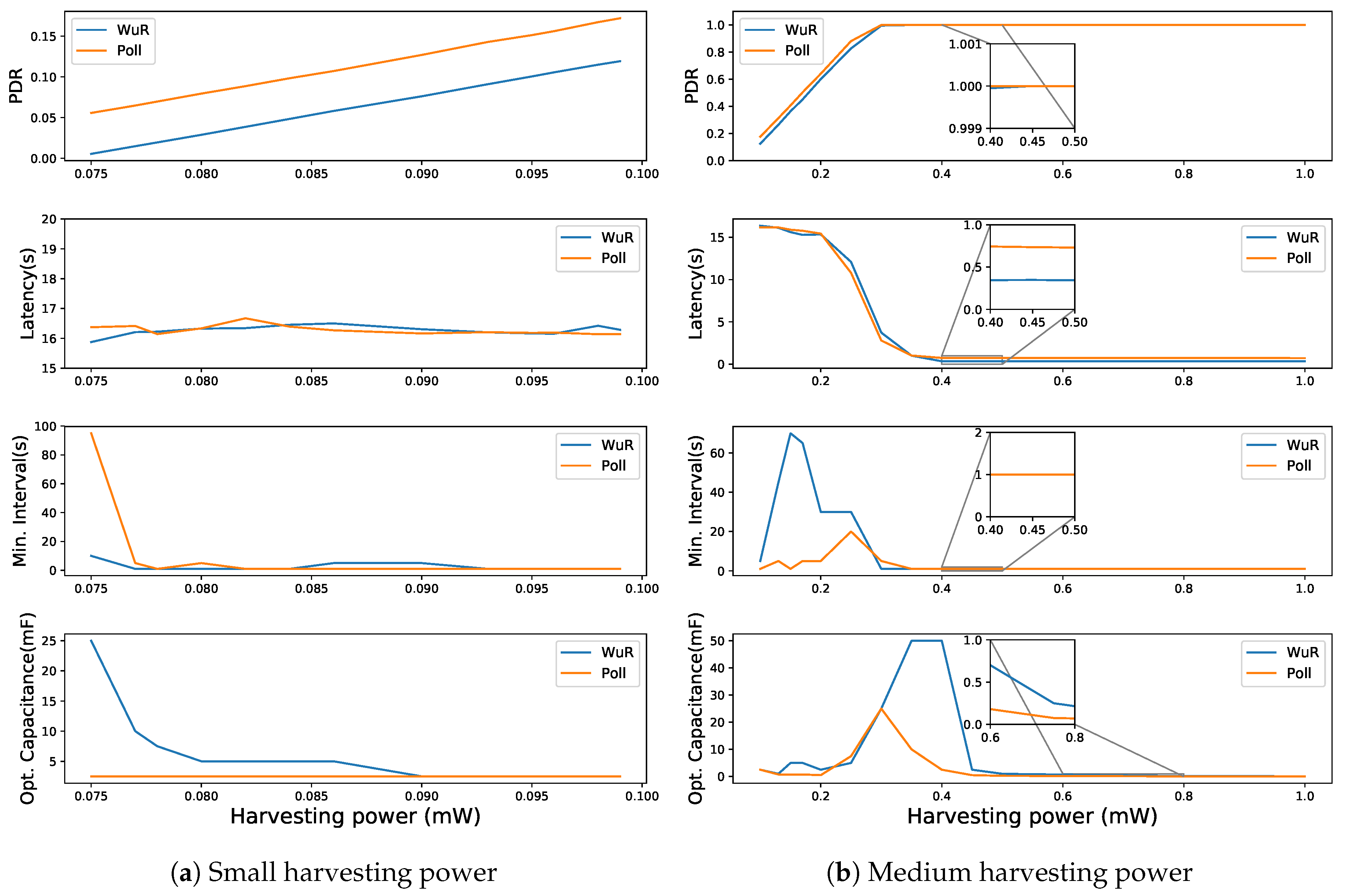
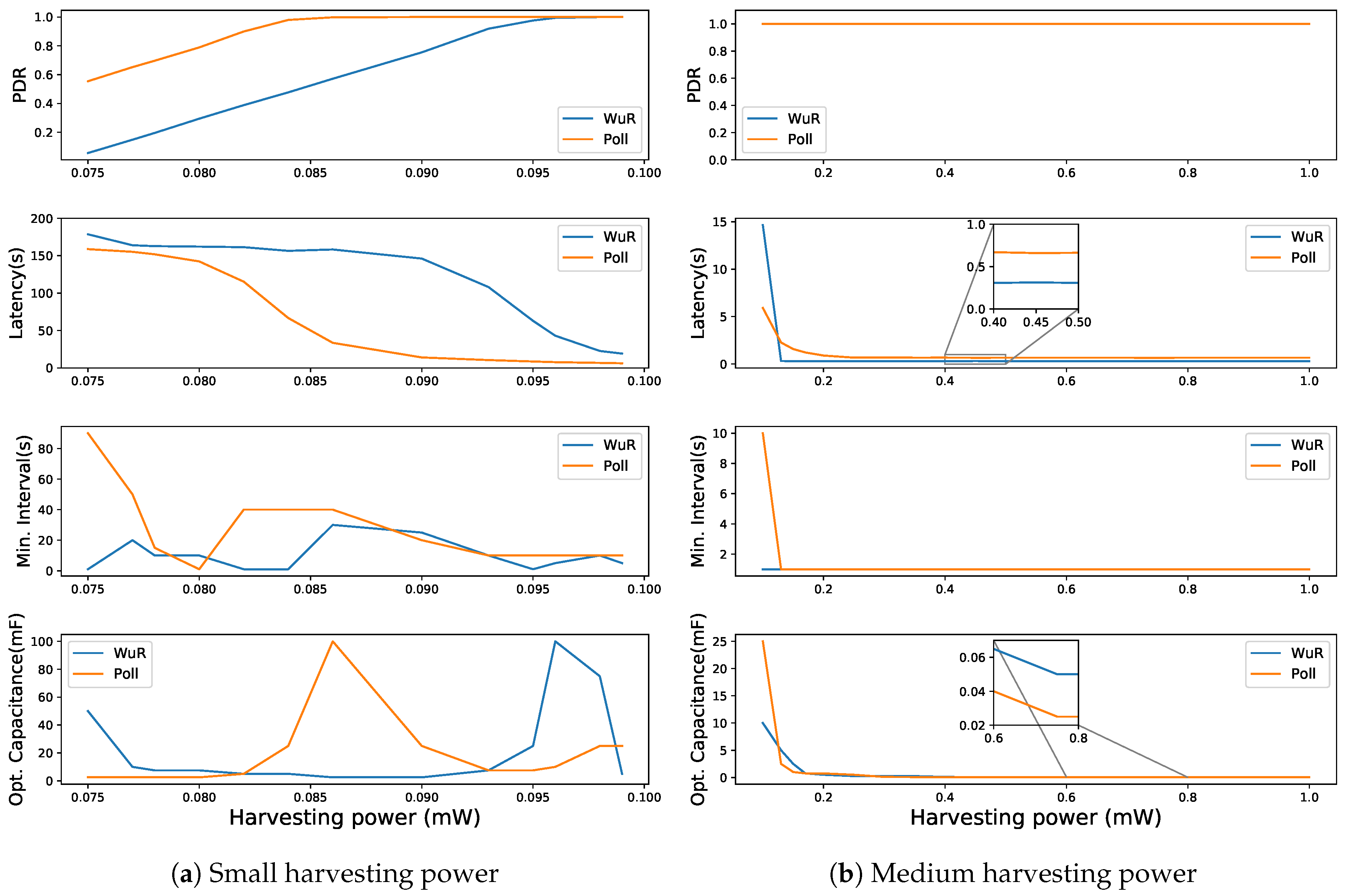
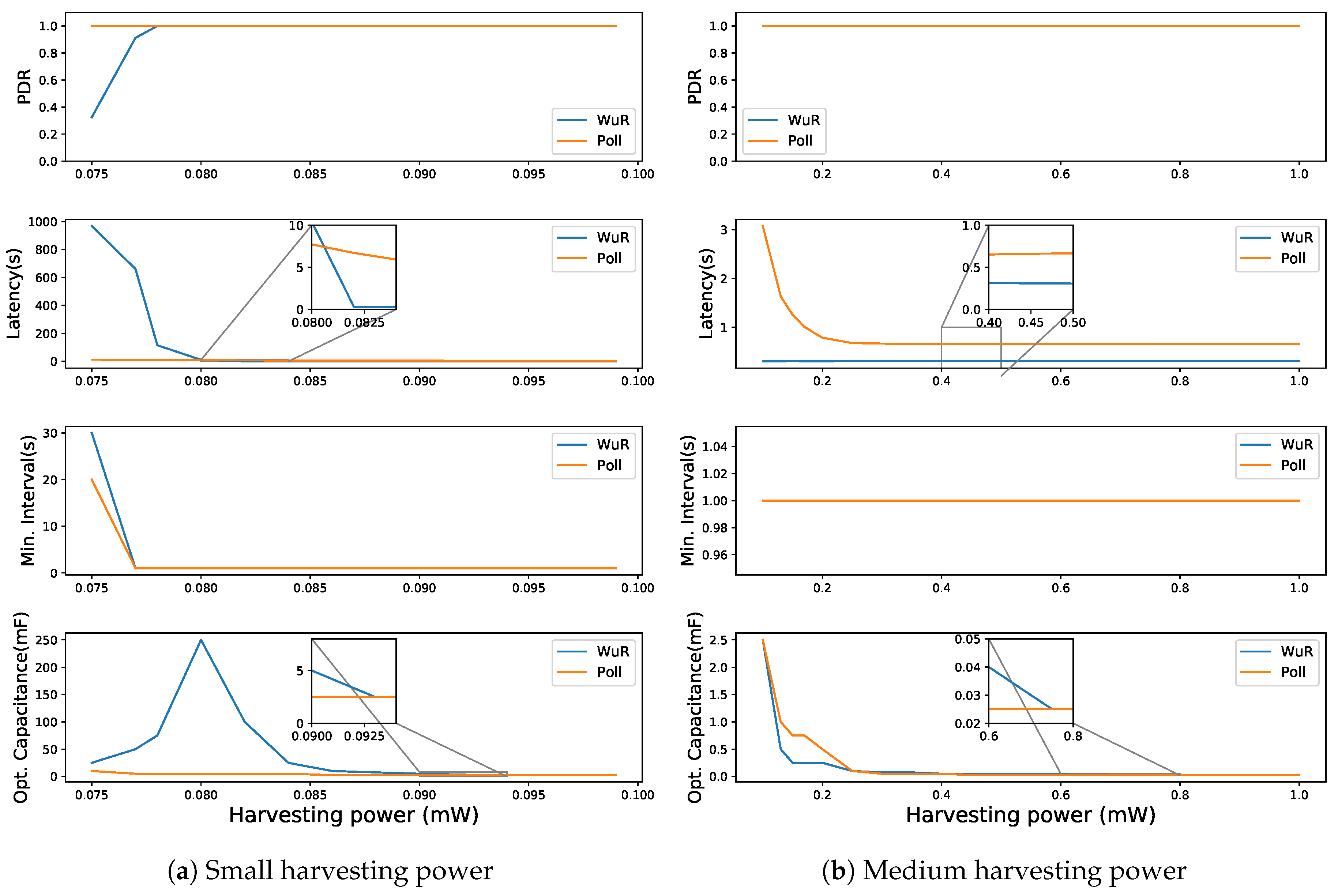
4.3. WuR-Based and Direct Poll-Based Friendship Protocol Performance
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Cisco 2020 Global Networking Trends Report. Available online: https://www.cisco.com/c/dam/m/en_us/solutions/enterprise-networks/networking-report/files/GLBL-ENG_NB-06_0_NA_RPT_PDF_MOFU-no-NetworkingTrendsReport-NB_rpten018612_5.pdf?ccid=cc001244&oid=rpten018612 (accessed on 20 August 2020).
- Signer, C. Batteryless Bluetooth Low Energy Communication. Bachelor Thesis, ETH Zurich, Zurich, Switzerland, 2017; pp. 1–41. [Google Scholar]
- Mesh Profile Bluetooth Specifications. Available online: https://www.bluetooth.com/specifications/mesh-specifications/ (accessed on 20 August 2020).
- Santi, P.; Simon, J. Silence Is Golden with High Probability: Maintaining a Connected Backbone in Wireless Sensor Networks. Wirel. Sens. Netw. 2004, 2920, 106–121. [Google Scholar]
- Fahmy, H.A. Wireless Sensor Networks Energy Harvesting and Management for Research and Industry; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Zeadallya, S.; Shaikh, F.K.; Talpur, A.; Sheng, Q.Z. Design architectures for energy harvesting in the Internet of Things. Renew. Sustain. Energy Rev. 2020, 128, 1–22. [Google Scholar]
- Tang, X.; Wang, X.; Cattley, R.; Gu, F.; Ball, A.D. Energy Harvesting Technologies for Achieving Self-Powered Wireless Sensor Networks in Machine Condition Monitoring: A Review. Sensors 2018, 18, 4113. [Google Scholar] [CrossRef] [PubMed]
- Adila, A.S.; Husam, A.; Husi, G. Towards the self-powered Internet of Things (IoT) by energy harvesting: Trends and technologies for green IoT. In Proceedings of the 2nd International Symposium on Small-Scale Intelligent Manufacturing Systems, Cavan, Ireland, 16–18 April 2018; pp. 1–5. [Google Scholar]
- Meli, M.; Würth, M. Advertising position with batteryless Bluetooth Low Energy. In Proceedings of the Embedded World Conference, Nuremberg, Germany, 28 February–1 March 2012; pp. 1–13. [Google Scholar]
- Meli, M.; Würth, M. Indoor batteryless temperature and humidity sensor for Bluetooth Low Energy. In Proceedings of the Wireless Congress, Munich, Germany, 9–10 November 2011; pp. 1–9. [Google Scholar]
- Fraternali, F.; Balaji, B.; Agarwal, Y.; Benini, L.; Gupta, R. Pible: Battery-Free Mote for Perpetual Indoor BLE Applications. In Proceedings of the 5th Conference on Systems for Built Environments, Shenzhen, China, 7–8 November 2018; pp. 168–171. [Google Scholar]
- Dekimpe, R.; Xu, P.; Schramme, M.; Gérard, P.; Flandre, D.; Bol, D. A Batteryless BLE Smart Sensor for Room Occupancy Tracking Supplied by 2.45-GHz Wireless Power Transfer. Integration 2019, 67, 8–18. [Google Scholar] [CrossRef]
- Sanislav, T.; Zeadally, S.; Mois, G.D.; Folea, S.C. Wireless energy harvesting: Empirical results and practical considerations for Internet of Things. J. Netw. Comput. Appl. 2018, 121, 149–158. [Google Scholar] [CrossRef]
- Brunecker, O.; Magno, M. TinyBird: An Energy Neutral Acoustic Bluetooth-Low-Energy Sensor Node with RF Energy Harvesting. In Proceedings of the 7th International Workshop on Energy Harvesting & Energy-Neutral Sensing Systems, New York, NY, USA, 10 November 2019; pp. 1–7. [Google Scholar]
- Zhong, Y.; Qian, B.; Zhu, Y.; Ren, Z.; Deng, J.; Liu, J.; Bai, Q.; Zhan, X. Development of an Implantable Wireless and Batteryless Bladder Pressure Monitor System for Lower Urinary Tract Dysfunction. IEEE J. Transl. Eng. Health Med. 2019, 8, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Witham, O.; Johnston, L.N.; Xiao, M.; Feng, J.; Zhou, N.; Shaker, G. Batteryless Wireless Water Leak Detection System. In Proceedings of the International Conference on Smart Applications, Communications and Networking, Sharm El Sheik, Egypt, 17–19 December 2019; pp. 1–4. [Google Scholar]
- Petäjäjärvi, J.; Kaleva, J.; Mikhaylov, K.; Pulkkinen, H.; Ahola, J.; Björkgren, M. Automatic charging of an energy harvesting powered sensor node from controllable energy source. In Proceedings of the 2018 14th International Wireless Communications Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 600–605. [Google Scholar]
- Piyare, R.; Murphy, A.L.; Kiraly, C.; Tosato, P.; Brunelli, D. Ultra Low Power Wake-Up Radios: A Hardware and Networking Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2117–2157. [Google Scholar] [CrossRef]
- Bello, H.; Xiaoping, Z.; Nordin, R.; Xin, J. Advances and Opportunities in Passive Wake-Up Radios with Wireless Energy Harvesting for the Internet of Things Applications. Sensors 2019, 19, 3078. [Google Scholar] [CrossRef] [PubMed]
- Gavrikov, P.; Verboket, P.E.; Ungan, T.; Müller, M.; Lai, M.; Schindelhauer, C.; Reindl, L.M.; Wendt, T. Using Bluetooth Low Energy to trigger an ultra-low power FSK wake-up receiver. In Proceedings of the 25th IEEE International Conference on Electronics, Circuits and Systems, Bordeaux, France, 9–12 December 2018; pp. 781–784. [Google Scholar]
- Ding, M.; Zhang, P.; Lu, C.; Zhang, Y.; Traferro, S.; Schaik, G.J.; Liu, Y.H.; Huijts, J.; Bachmann, C.; Dolmans, G.; et al. A 2.4GHz BLE-compliant fully-integrated wakeup receiver for latency-critical IoT applications using a 2-dimensional wakeup pattern in 90nm CMOS. In Proceedings of the 2017 IEEE Radio Frequency Integrated Circuits Symposium (RFIC), Honolulu, HI, USA, 4–6 June 2017; pp. 168–171. [Google Scholar]
- Roberts, N.E.; Craig, K.; Shrivastava, A.; Wooters, S.N.; Shakhsheer, Y.; Calhoun, B.H.; Wentzloff, D.D. 26.8 a 236nw -56.5dbm-sensitivity bluetooth low-energy wakeup receiver with energy harvesting in 65nm cmos. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 31 January–4 February 2016; pp. 450–451. [Google Scholar]
- Giovanelli, D.; Milosevic, B.; Brunelli, D.; Farella, E. Enhancing Bluetooth Low Energy with wake-up radios for IoT applications. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1–6. [Google Scholar]
- Mikhaylov, K.; Karvonen, H. Wake-up radio enabled BLE wearables: Empirical and analytical evaluation of energy efficiency. In Proceedings of the 14th International Symposium on Medical Information Communication Technology, Nara, Japan, 20–22 May 2020; pp. 1–5. [Google Scholar]
- Sanchez, A.L. Study of Adaptation Mechanisms of the Wireless Sensor Nodes to the Context for Ultra-low Power Consumption. Ph.D. Thesis, University of Grenoble, Grenoble, France, 2016; pp. 1–127. [Google Scholar]
- Abdelhamid, M.R.; Paidimarri, A.; Chandrakasan, A.P. A −80 dBm BLE-Compliant, FSK wake-up Receiver with System and Within-Bit Duty Cycling for Scalable Power and Latency. In Proceedings of the 2018 IEEE Custom Integrated Circuits Conference (CICC), San Diego, CA, USA, 8–11 April 2018; pp. 1–4. [Google Scholar]
- Wang, P.P.; Mercier, P.P. A 220 μW −85 dBm sensitivity BLE compliant wake-up receiver achieving −60 dB SIR via single-die multichannel FBAR-based filtering and a 4-Dimentional wake-up signature. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 440–442. [Google Scholar]
- Liu, Q.; IJntema, W.; Drif, A.; Pawelczak, P.; Zuniga, M. BEH: Indoor Batteryless BLE Beacons using RF Energy Harvesting for Internet of Things. arXiv 2019, arXiv:1911.03381. [Google Scholar]
- Romero, E.A.D.L. Experimental Performance Evaluation of the Bluetooth Mesh Protocol for Monitoring Applications. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2019. [Google Scholar]
- Delgado, C.; Sanz, J.M.; Famaey, J. On the Feasibility of Batteryless LoRaWAN Communications using Energy Harvesting. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Gawhare, S.B.; Gaikwad, A. Area and Power efficient High Speed Voltage Comparator. In Proceedings of the International Conference on Automatic Control and Dynamic Optimization Techniques, Pune, India, 9–10 September 2016; pp. 198–201. [Google Scholar]
- nRF52840 Product Specification. Available online: https://infocenter.nordicsemi.com/pdf/nRF52840_PS_v1.0.pdf (accessed on 20 August 2020).
- Nordic Semiconductor. Available online: https://devzone.nordicsemi.com/nordic/power/ (accessed on 20 August 2020).
- Data Sheet AS3933. Available online: http://www1.futureelectronics.com/doc/AUSTRIAMICROSYSTEMS/AS3933-BQFT.pdf (accessed on 20 August 2020).
- Silva, S.; Fernandes, T.; Valente, A.; Moreira, A. Coexistence and Interference Tests on a Bluetooth Low Energy Front-End. In Proceedings of the IEEE Science and Information Conference, London, UK, 27–29 August 2014; pp. 1014–1018. [Google Scholar]
- Karvonen, H.; Mikhaylov, K.; Acharya, D.; Rahman, M. Performance Evaluation of Bluetooth Low Energy Technology Under Interference. In EAI International Conference on Body Area Networks; Springer: Cham, Switzerland, 2020; pp. 147–156. [Google Scholar]
- Natarajan, R.; Zand, P.; Nabi, M. Analysis of Coexistence between IEEE 802.15.4, BLE and IEEE 802.11 in the 2.4 GHz ISM Band. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6025–6032. [Google Scholar]
- Ghamari, M.; Villeneuve, E.; Soltanpur, C.; Khangosstar, J.; Janko, B.; Sherratt, R.S.; Harwin, W. Detailed Examination of a Packet Collision Model for Bluetooth Low Energy Advertising Mode. IEEE Access 2018, 6, 46066–46073. [Google Scholar] [CrossRef]
- Energy Sources and Power Management in IoT Sensors and Edge Devices. Available online: https://jaxenter.com/energy-sources-power-management-iot-sensors-edge-devices-145006.html (accessed on 8 August 2020).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event | Time [s] | Current cons. | Current cons. | Comments |
|---|---|---|---|---|
| of the LPN | of the LPN | |||
| without WuR | with WuR | |||
| [mA] | [mA] | |||
| Rx WuS | 60 | N/A | 0.81 | Receive WuS |
| Radio wake-up | 1510 | 0.798 | 0.8007 | Prepare for poll transmission |
| TX (at 4 dBm) | 384 | 11.75 | 11.7527 | Tx advertisement packet on channel 37 |
| Change channel | 300 | 4.078 | 4.0807 | Change radio frequency |
| TX (at 4 dBm) | 384 | 12.15 | 12.1527 | Tx advertisement packet on channel 38. |
| Change channel | 330 | 4.328 | 4.3307 | Change again the radio frequency |
| TX (at 4 dBm) | 384 | 12.01 | 12.0127 | Tx advertisement packet on channel 39. |
| Radio off | 290 | 5.898 | 5.9007 | Main radio turned-off |
| Post processing | 620 | 1.618 | 1.6207 | |
| Cool down | 14,000 | 0.492 | 0.4947 | Prepare to switch to the sleep state |
| Sleep | RD | 0.01597 | 0.01867 | Device in sleep mode |
| Wake-up prescan | 1570 | 0.758 | 0.7607 | Wake-up for Rx |
| Listen | AT | 14.318 | 14.3207 | Actively Listen for incoming message |
| Scan message | 544 (or 464) | 17.2 | 17.2027 | Rx 68 B FQ data (or 58 bytes FU) |
| Radio off | 320 | 6.858 | 6.8607 | Turns off the main radio |
| Post-processing | 26,300 | 0.488 | 0.48827 | Set up the sleep timer for the next event |
| and Cool Down | and switch to sleep state |
| Parameters | Symbol | Value |
|---|---|---|
| Poisson packet arrival rate | {1, 10, 30, 60, 120} s | |
| Harvesting power | [0.075, 200] mW | |
| Capacitor size | C | [[0.0075, 500] mF |
| Signal (WuS/Poll) interval | SI | [1, 150] s |
| Turn-off voltage | 1.8 V | |
| Max operating voltage | E | 3.3 V |
| Friend Queue size | 16 packets | |
| Receive Delay | 255 ms | |
| Arrival time (max up to RW) | 0 ms | |
| Friend Queue message packet size | 68 bytes | |
| Friend Update packet size | 58 bytes | |
| Friend Poll packet size | 48 bytes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sultania, A.K.; Delgado, C.; Famaey, J. Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios. Sensors 2020, 20, 5196. https://doi.org/10.3390/s20185196
Sultania AK, Delgado C, Famaey J. Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios. Sensors. 2020; 20(18):5196. https://doi.org/10.3390/s20185196
Chicago/Turabian StyleSultania, Ashish Kumar, Carmen Delgado, and Jeroen Famaey. 2020. "Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios" Sensors 20, no. 18: 5196. https://doi.org/10.3390/s20185196
APA StyleSultania, A. K., Delgado, C., & Famaey, J. (2020). Enabling Low-Latency Bluetooth Low Energy on Energy Harvesting Batteryless Devices Using Wake-Up Radios. Sensors, 20(18), 5196. https://doi.org/10.3390/s20185196