1. Introduction
As a part of the vehicular network, vehicle positioning plays an important role in intelligent traffic management systems, vehicle detection, autonomous driving, intelligent parking, and so on [
1]. Traditional vehicle positioning usually adopts global navigation satellite system (GNSS) represented by global positioning system (GPS), GLONASS, Beidou navigation system (BDS), and Galileo [
2,
3,
4,
5,
6,
7]. However, in urban canyon environments, GNSS signals are often blocked by high-rise buildings and perform with low capability in terms of positioning [
8]. Mobile communication networks can fill the gaps in positioning performance of GNSS in urban environment due to its widely distribution and high signal transmission quality [
9,
10,
11,
12]. However, it lacks hear-ability (the capability of detecting the number of base stations). One of the striking features of fifth generation mobile networks (5G) is ultra-dense network (UDN) which improves the hear-ability of mobile communication network. Therefore, UDN brings the opportunity of 5G vehicle positioning in urban canyon environments. The 5G vehicle positioning method can be divided into the following categories: the method based on observed time difference of arrival (OTDOA) [
13], angle of arrival (AOA)-based method [
14,
15], joint AOA ranging method [
16,
17], and so on. Both OTDOA and joint AOA-ranging methods require accurate time delay estimation of 5G signals to improve positioning performance.
The time delay estimation algorithm can be divided into two categories: correlation peak detection-based algorithm [
12] and super-resolution-based algorithm [
18,
19,
20,
21,
22]. Super-resolution-based algorithm has higher time delay estimation accuracy than correlation peak detection-based algorithm. As a popular algorithm of super-resolution-based algorithm, multiple signal classification (MUSIC) algorithm estimates time delay by the orthogonality between the steering vector of received baseband signal and noise subspace of received baseband signal’s covariance matrix. MUSIC based time delay estimation methods have been studied in recent years, Xinrong et al. [
23] applied super-resolution spectral estimation techniques to the measured channel frequency response to accurately estimate TOA for indoor geolocation applications. The simulation results show that super-resolution techniques can significantly improve the performance of TOA estimation as compared with conventional techniques including direct IFT and DSSS signal-based cross-correlation techniques. Jing et al. [
24] proposed a frequency-domain-based cross-spectral super-resolution time delay estimate algorithm, and the method performed an accurate time delay estimation in the multipath channel model that they proposed in the paper. Fang et al. [
25] compared the performance of the super-resolution method with MUSIC and a traditional cross-correlation algorithm in a simulated indoor multipath TOA environment, the simulation results showed that TOA estimation with time domain channel estimation can approach high level accuracy and stability. Feng-Xiang et al. [
26] converted time delay estimation into a sinusoidal parameter estimation problem, and the sinusoidal parameters are estimated by generalizing the MUSIC algorithm. Simulation results showed that the proposed algorithm performs better than the classical correlation approach and the conventional MUSIC method for the closely spaced components in multipath environments. Khanzada et al. [
27] compared the estimation of signal parameters via the rotational invariance technique (ESPRIT), root-multiple signal classification (RootMUSIC), and matrix pencil (MP) for ranging. The simulation results show that RootMUSIC and MP algorithm demonstrate better performance in ranging. Wang et al. [
28] used a two-dimensional MUSIC algorithm to estimate TOA and AOA in a IR-UWB system, and the simulation results showed that the performance is better than RootMUSIC and matrix pencil algorithm. Hailong et al. [
29] proposed a novel TDOA algorithm with super resolution based on a multi-dimensional cross-correlation function, namely the volume cross-correlation function (VCC). Numerical simulations showed an excellent time resolution capability of the algorithm in multipath environment. Gao et al. [
22] made comparisons of the super-resolution TOA/TDOA estimation algorithms and the experience showed that the MUSIC-CR algorithms have the highest resolution and lowest SNR threshold. Abudabbousa et al. [
30] proposed a super-resolution TDOA estimate algorithm based on orthogonal frequency division multicarrier, the experimental results showed that the approach can be useful for several applications needing accurate positioning. Chen et al. [
31] proposed two 2-D DOA and TOA estimators called FFT-MUSIC and two-step FFT-MUSIC. Simulation results showed that both estimators can reduce the computation cost by 1–2 orders of magnitude.
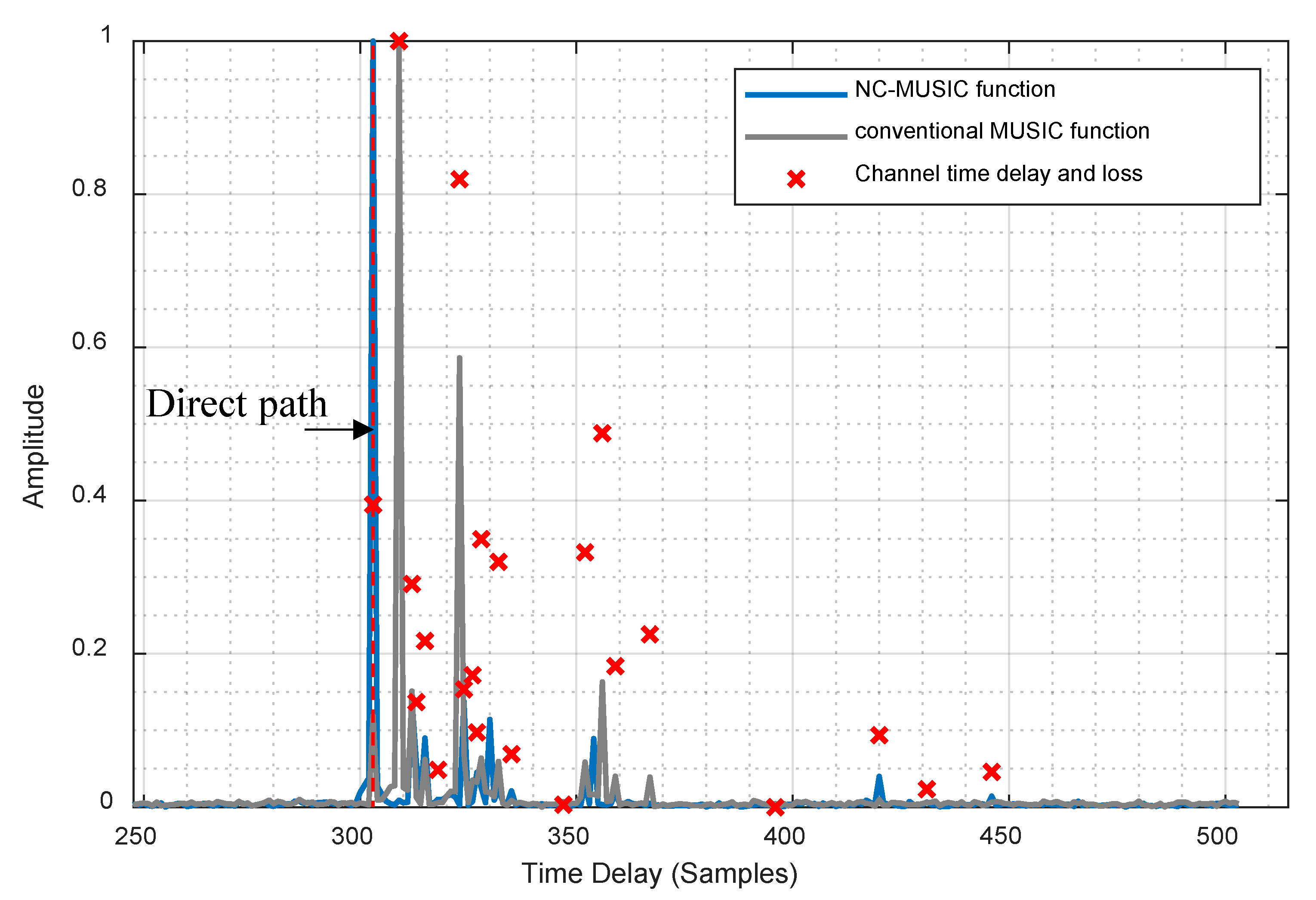
All the above methods effectively improve the accuracy and robustness of time delay estimation. However, few researchers have addressed the problem of non-line of sight (NLOS) propagation scenarios which is common for mobile communication signals in urban canyon environments. In some cases, the signal strength of direct path is weaker than non-direct path in NLOS propagation scenario, e.g., when there is an obstruction between the transmitting antenna and the receiving antenna, and the obstruction absorbs electromagnetic waves more heavily (such as thick walls), the direct path will receive severe degradation from the obstruction, while the NLOS path still has strong signal strength through the transmission to the receiving antenna. The direct path will be submerged by the non-direct path in conventional MUSIC algorithm and this problem will cause a large delay estimation error as shown in
Figure 1. In
Figure 1, we simulated a typical channel in an NLOS propagation scenario, and the peak of direct path in MUSIC spectral function of the received signal is submerged by the non-direct path. In order to solve this problem, we propose a novel time delay estimation algorithm called non-line of sight cancellation multiple signal classification (NC-MUSIC). In this algorithm, the time delay spread of received signal is roughly estimated through the cross-correlation method, and the NLOS path with strong signal strength is cancelled while the direct path is retained. This step will reduce the peak of NLOS path and make the peak of direct path more obvious. Then, the covariance matrix of the received signal is calculated and the eigenvalue decomposition (EVD) is carried out. An unsupervised multipath estimation method is used to estimate the number of multipath in the propagation channel. With the number of multipath and the EVD, the noise subspace of covariance matrix is solved. The MUSIC spectral function is calculated from the noise subspace. Finally, the time delay of the direct path is estimated by searching the peak of the MUSIC spectral function.
The contributions of this paper are:
The proposal of a novel accurate time delay estimation algorithm based on NLOS cancellation and MUSIC super-resolution method.
The proposal of an unsupervised multipath estimation method to estimate the multipath number of received baseband signal.
Improvement of the MUSIC spectral function calculation method in conventional MUSIC super-resolution to make the peak of direct path more obvious.
The proposed algorithm in this paper is used to eliminate the NLOS error due to the signal propagation. In practice, there is still a synchronization error between the vehicle and the base station in addition to the NLOS error. This error will also lead to errors in the positioning results. The distance between RX and TX can be measured by round-trip time (RTT) and the synchronization error between RX and TX can also be ignored by calculating TDOA.
The rest of the paper is organized as follows. The system model is developed in
Section 2. The NC-MUSIC algorithm is defined in
Section 3. Then, the simulation results are discussed in
Section 4. Finally, the conclusions and future work are drawn in
Section 5.
3. Methodology
This section introduces the proposed time delay estimation algorithm called non-line of sight cancellation multiple signal classification (NC-MUSIC). The structure diagram of the proposed NC-MUSIC algorithm is shown in
Figure 3. First of all, NLOS/LOS is recognized by cross-correlation results of received signal, if the received signal is NLOS propagation, the non-direct paths will be cancelled according to the cross-correlation results. Then, MUSIC peak search is conducted on the NLOS cancelled signal with the multipath number estimated by unsupervised multipath estimation. And finally, the accurate estimation of direct signal propagation time delay is outputted. The following is a detailed description of the NC-MUSIC algorithm.
3.1. LOS/NLOS Identification and NLOS Cancellation
The received signal is cross-correlated, and the result of discrete cross-correlation under multi-path transmission is as follows:
where the
is the length of discrete received baseband signal,
is the length of discrete transmit baseband signal, and
is the length of cross-correlation result of the transmit signal and received signal. Then, the peak of the discrete cross-correlation result was searched based on gradient to roughly estimate the multipath time delay. The gradient of cross-correlation result is:
The
is the gradient of cross-correlation result, the roughly time delay estimation result is:
where
is the roughly time delay estimation result,
is the threshold of the search of cross-correlation, the peak value less than this threshold is not regarded as multipath delay, and
is the number of multipath time delay. The corresponding correlation peak value of each multipath delay is:
After obtaining the multipath time delay estimation of received signal and the corresponding correlation peak, NLOS/LOS identification can be conducted. The identification principle is: if the correlation peak with the minimum time delay is not the maximum correlation peak, it means that the signal has been propagated by NLOS. For LOS component which is weaker than the NLOS components, the peak of the LOS path can be detected by correlation, but after using the conventional MUSIC algorithm, the peak of the LOS path is submerged by the peak of the NLOS path. This phenomenon can be seen in
Figure 1, where the power of the LOS path is not very weak, but the LOS path in the spectral function of the conventional MUSIC algorithm is severely affected by the NLOS path, and the peaks are submerged and the LOS path cannot be identified, so the NLOS component needs to be cancelled. The way of NLOS cancel is to reconstruct the non-direct path signal. The method of reconstruction of non-direct path signal is as follows.
where
is the non-direct path signal,
is the amplitude loss of each non-direct path signal component, and the calculation method is as follows:
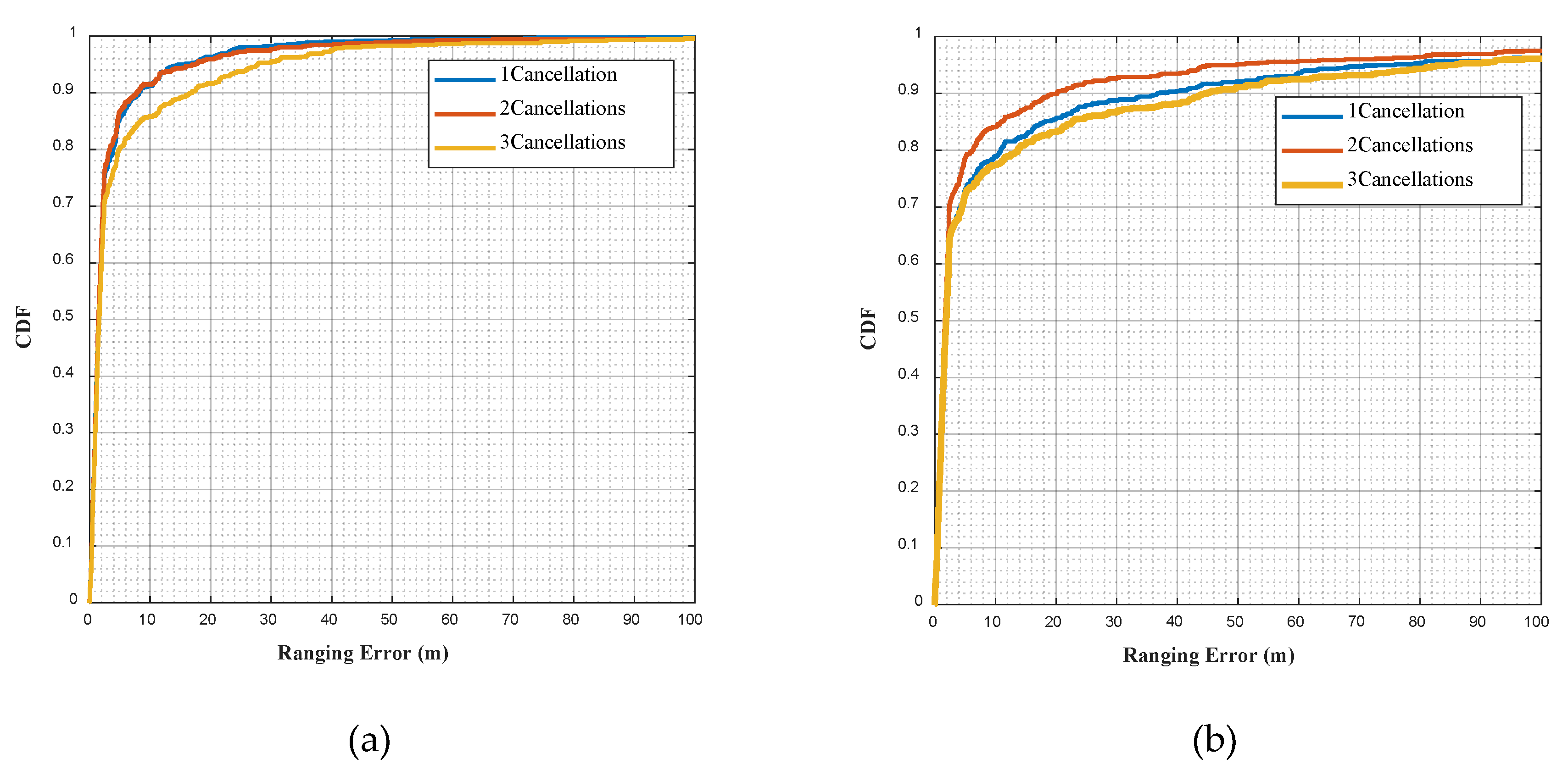
Received signal minus the reconstruction of the non-direct path signal can get NLOS cancelled signal . There are residual non-direct path signals component because the cross-correlation method is not accurate for time delay estimation, and a second or multiple NLOS cancellations can be applied by Equations (20)–(24). However, after repeated cancellations, the correlation peak of weak signal delay will be confused with the side peak of OFDM signal correlation, which will lead to greater error. The experimental part will give a comparative analysis of cancellation times and ranging accuracy. The next subsection mainly describes the covariation matrix and eigenvalue calculation. In order to simplify the description of the algorithm, the signals cancelled by different cancellation times are denoted as .
3.2. Covariation Matrix and Eigenvalue Calculation
Since the signal after NLOS cancel still has direct path and multi-path residual components, it can be expressed as
where
is the number of multipath after NLOS cancel,
is the amplitude loss of each multipath signal components,
is the time delay of each multipath signal components. The baseband signal in Equation (5) is substituted into Equation (25) as the transmitting signal, and the following equation can be obtained:
We can then write this signal model in vector form:
where:
The covariance matrix
of the signal is calculated by
, and the eigenvalue decomposition of
is:
where,
U is the matrix composed of the eigenvectors of
, and
is the diagonal matrix composed of the eigenvalues of
.
Let be the set of eigenvalues of . The next subsection describes the method of unsupervised multipath number estimation of received signal.
3.3. Unsupervised Multipath Estimation
The unsupervised multipath estimation part is used to estimate the number of multipath time delay to provide more accurate estimates. Eigenvalues could theoretically be gathered for two types of noise and signal eigenvalue, because the noise in the process of transmission is more stable, and it is so different between each signal path delay and signal loss. So, the noise subspace corresponding eigenvalues can be gathered for a cluster, the characteristics of the signal subspace corresponding values cannot be together for a cluster. The clustering results can be estimated in reverse. In other words, the outlier that cannot be clustered into a cluster can be taken as the eigenvalues corresponding to the signal subspace. The number of these outliers is the number of multipaths.
The number of clusters of noise eigenvalues is not a constant, so we must adopt a clustering method which doesn’t need the number of clusters. Moreover, all of the process is happening during the positioning, so a high complexity method shouldn’t be adopted. In this paper, the density-based spatial clustering of applications with noise (DBSCAN) [
33] algorithm is adopted to cluster the eigenvalue
because it doesn’t need to provide the number of clusters and has a low complexity. By reversely estimating the clustering results, the outliers that cannot be clustered as a class are regarded as the eigenvalues corresponding to the signal subspace, and the number of these outliers is the number of multipaths. Unsupervised multipath estimation is detailed below.
DBSCAN is a density-based clustering method. Its main parameters are clustering radius (
radius) and the minimum number of elements in a class (
Pts). Clustering radius affects the range of neighborhood density judgment. With the influence of clustering radius and the minimum number of elements in a class, the different values of the two parameters affect the threshold of the data density in the clustering. The data density above this threshold can be clustered into a class, while the data density below this threshold cannot be clustered into a class. In this paper, the data are the eigenvalues of the received signal covariance matrix, and the eigenvalues of the noise subspace have high similarity, in order to cluster the noise subspace eigenvalues with high similarity into one class and filter out the signal subspace eigenvalues with low similarity by clustering. We experimentally analyzed the values of
radius and
Pts, and found that signal subspace eigenvalues will be treated as noise subspace eigenvalues if the data density threshold is high, and noise subspace eigenvalues will be treated as signal subspace eigenvalues if the data density threshold is low, both of these circumstances will affect the accuracy of the final delay estimation results. So, we choose the appropriate radius and Pts to cluster the eigenvalues. In this paper,
and
radius is as follows:
The algorithm process of unsupervised multipath estimation is described as Algorithm 1. The estimated value of the output multipath number is taken as the number of eigenvalues corresponding to the noise subspace in Equation (14), and the noise subspace is obtained.
| Algorithm1. Unsupervised Multipath Estimation. |
| Input:λPts, radius |
| Output:NNC |
| 1: Mark all elements of λ as unvisited; |
| 2: Select an unvisited element p randomly; |
| 3: Mark p as visited; |
| 4: Cp is a set whose elements’ distance from p is less than radius; |
| 5: ; |
| 6: IF |
| 7: Create a new cluster, add p to the cluster; |
| 8: FOR every element p′ in Cp; |
| 9: IF p′ is unvisited |
| 10: Mark p′ as visited; |
| 11: Cp′ is a set whose elements’ distance from p′ is less than radius; |
| 12: IF |
| 13: Add all elements of Cp′ to the new cluster; |
| 14: END IF |
| 15: IF p′ doesn’t belong to any other cluster |
| 16: Add p′ to the new cluster; |
| 17: END IF |
| 18: END IF |
| 19: END FOR |
| 20: END IF |
| 21: Nmode is the element number of the cluster with the largest number of elements; |
| 22: |
3.4. MUSIC Spectral Function Calculation and Peak Search
The noise subspace of the received signal is obtained through Equation (14). In order to reduce the submersion of the non-direct path signal to the direct path signal, we have improved the calculation method of the spectral function in the traditional MUSIC algorithm. The improved calculation method is as follows:
where
is the spectral function.
Then, find the delay corresponding to the peak value of PMUSIC as the estimated value of propagation delay:
After the above process, the estimated propagation delay can be obtained.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}