An AUV-Aided Cross-Layer Mobile Data Gathering Protocol for Underwater Sensor Networks †

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Related Work
3. System Model
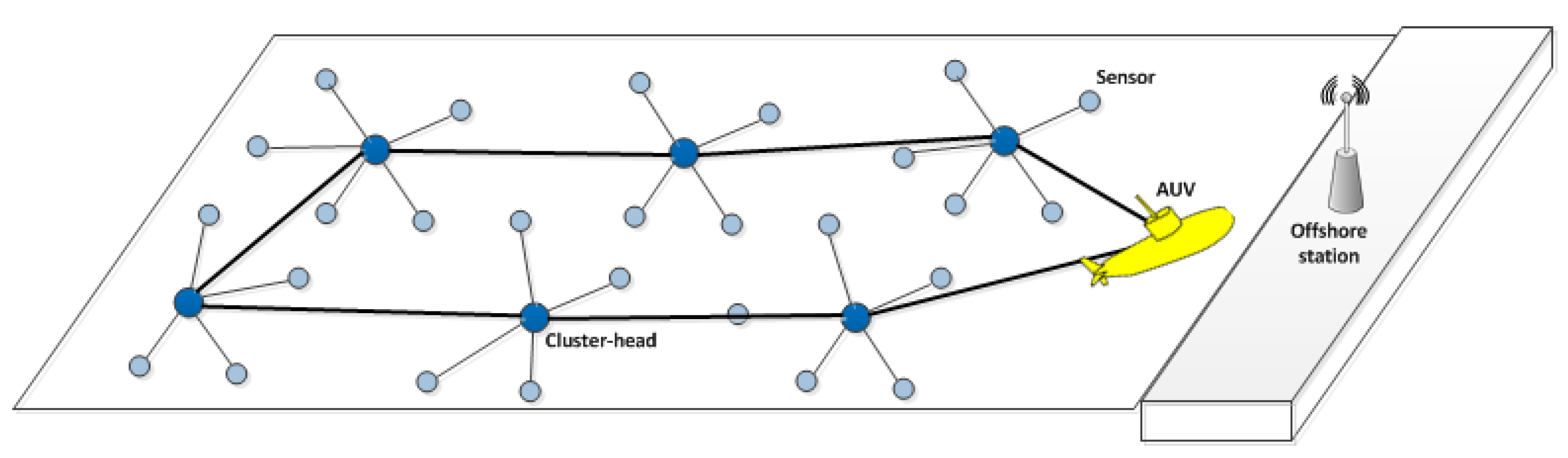
3.1. Network Architecture
3.2. Acoustic Propagation Model
4. Description of Our Proposed Cross-Layer Mobile Data-Gathering Protocol
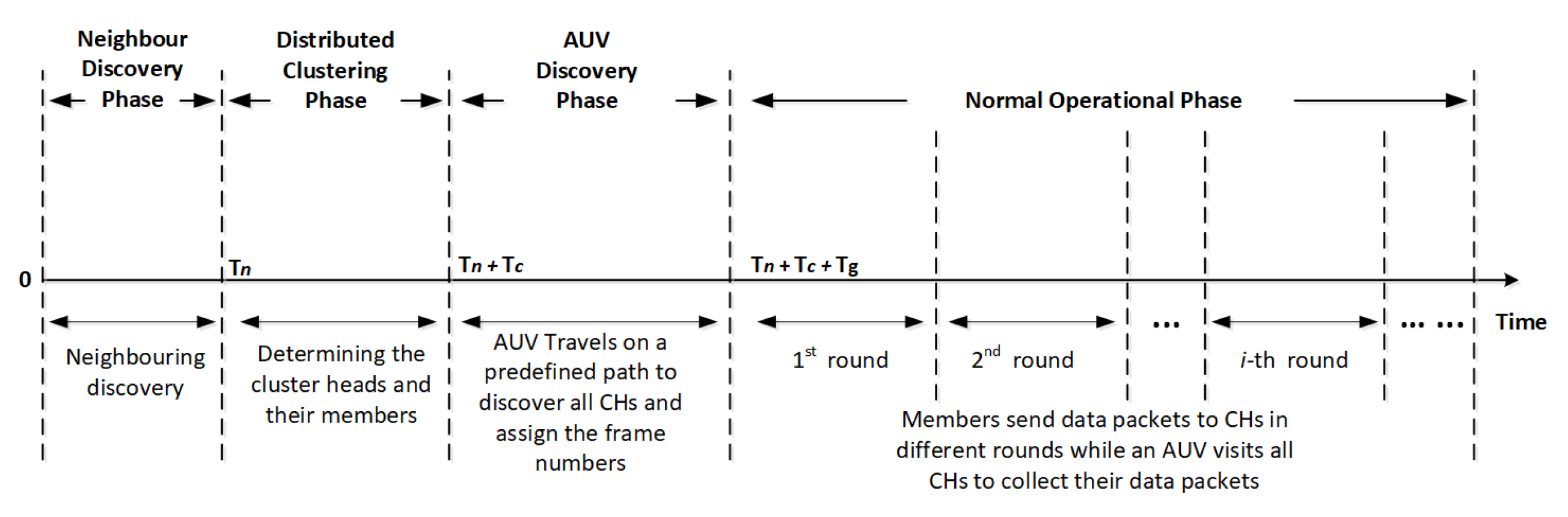
4.1. Overview
4.2. Neighbor Discovery Phase
4.3. Distributed Clustering Phase
Expected Consumed Energy Calculation
| (3) | |
| (4) | |
| (5) | |
| (6) | |
| (7) |
4.4. AUV Discovery Phase
| Algorithm 1: AUV discovering algorithm |
 |
| Algorithm 2: Cluster head operation during the discovery phase |
 |
4.5. Normal Operational Phase
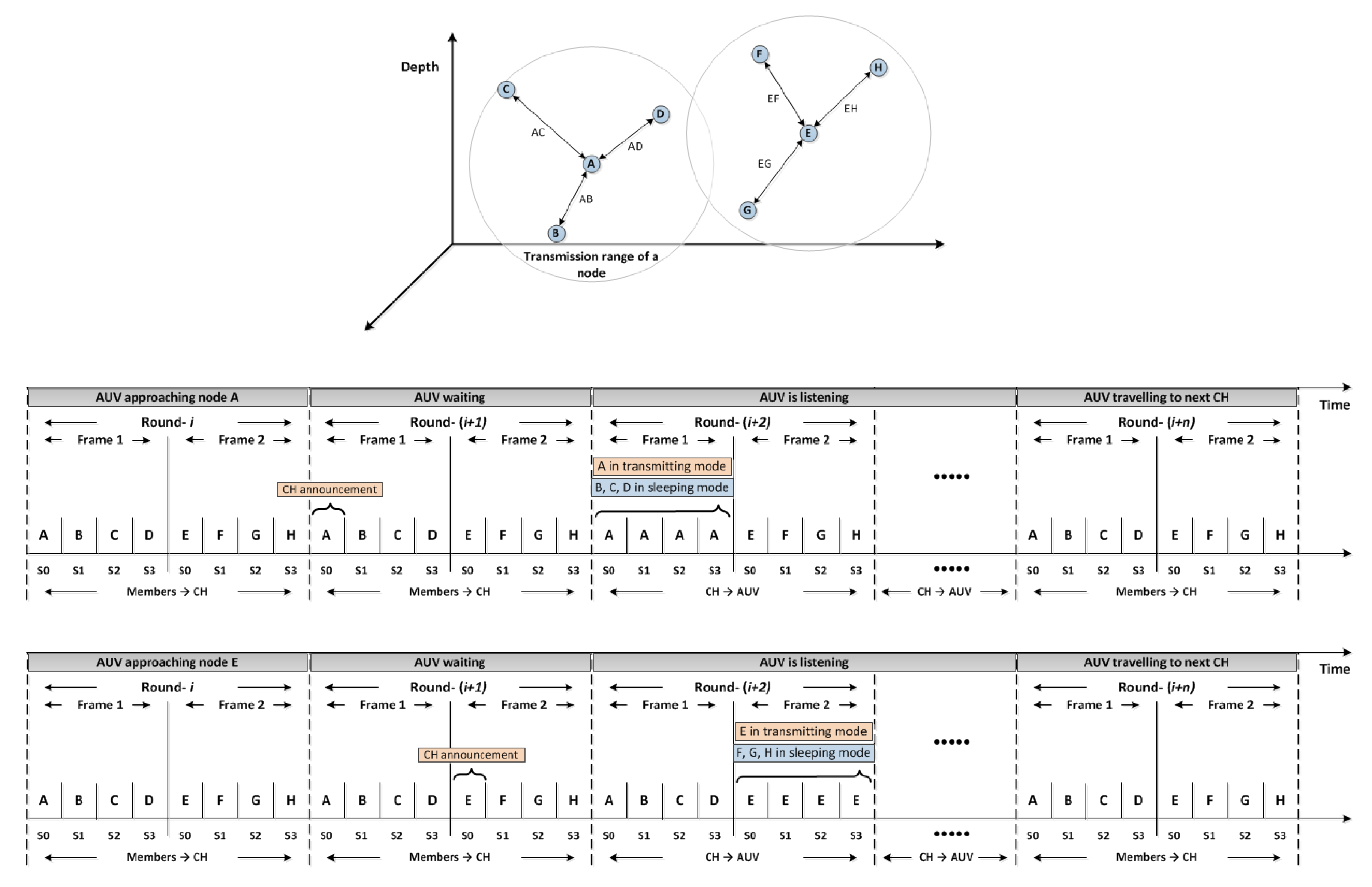
4.5.1. Auv Data Gathering
4.5.2. Intracluster Communications
5. Experimental Results
5.1. Simulation Setups
5.2. Performance Metrics
5.3. Simulation Evaluation
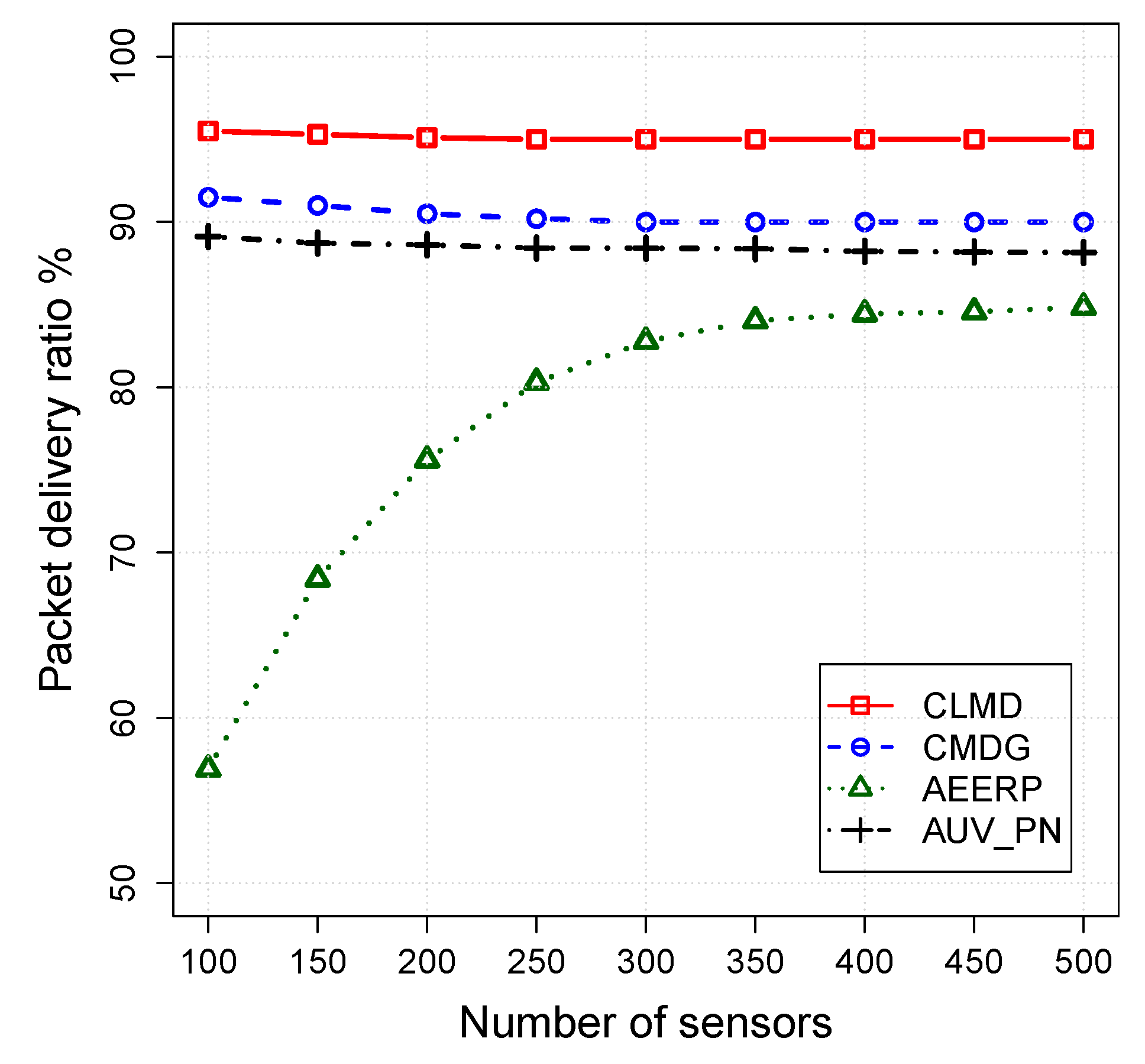
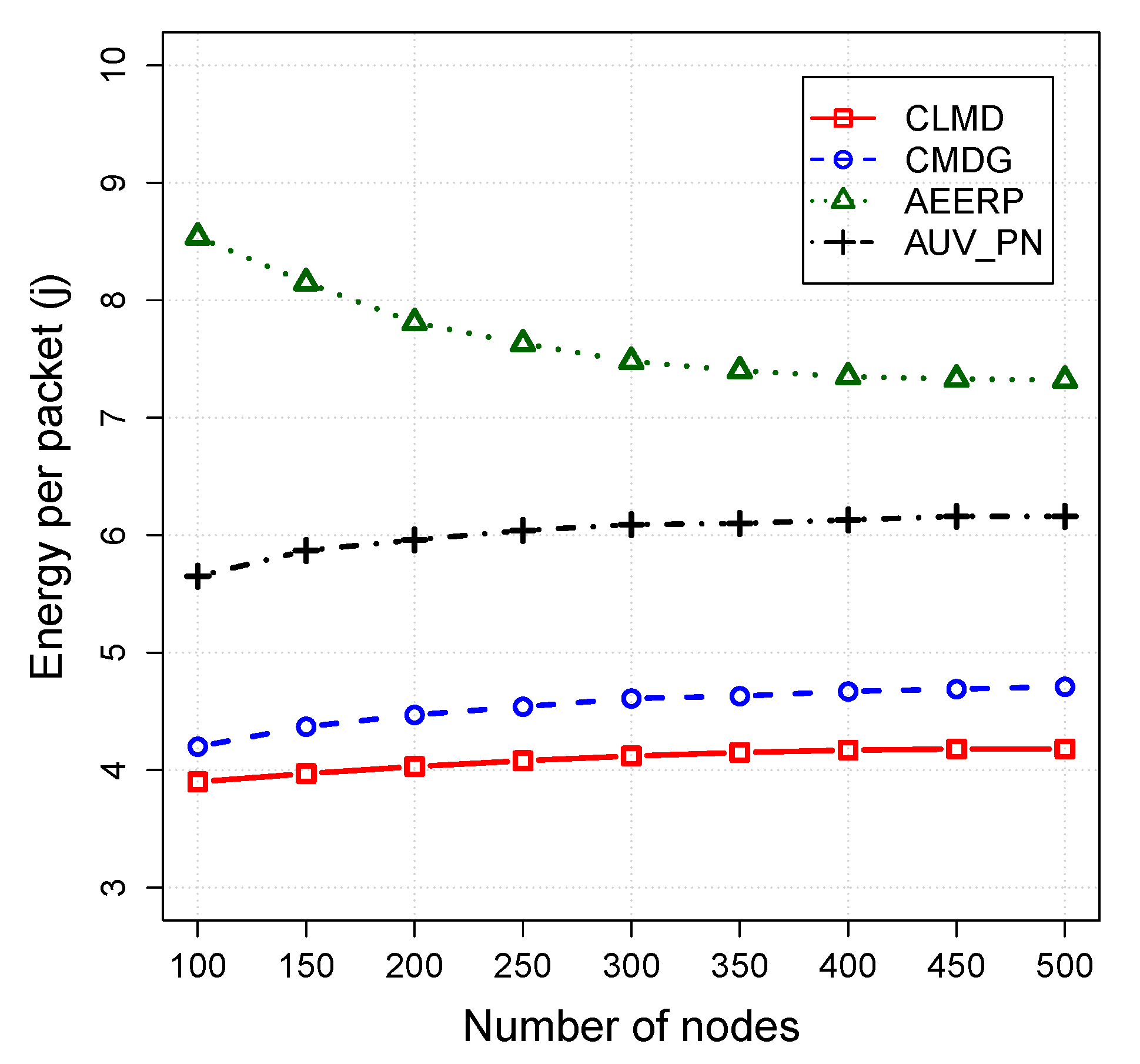
5.3.1. the Impact of Routing Layer on the Cross-Layer Protocol
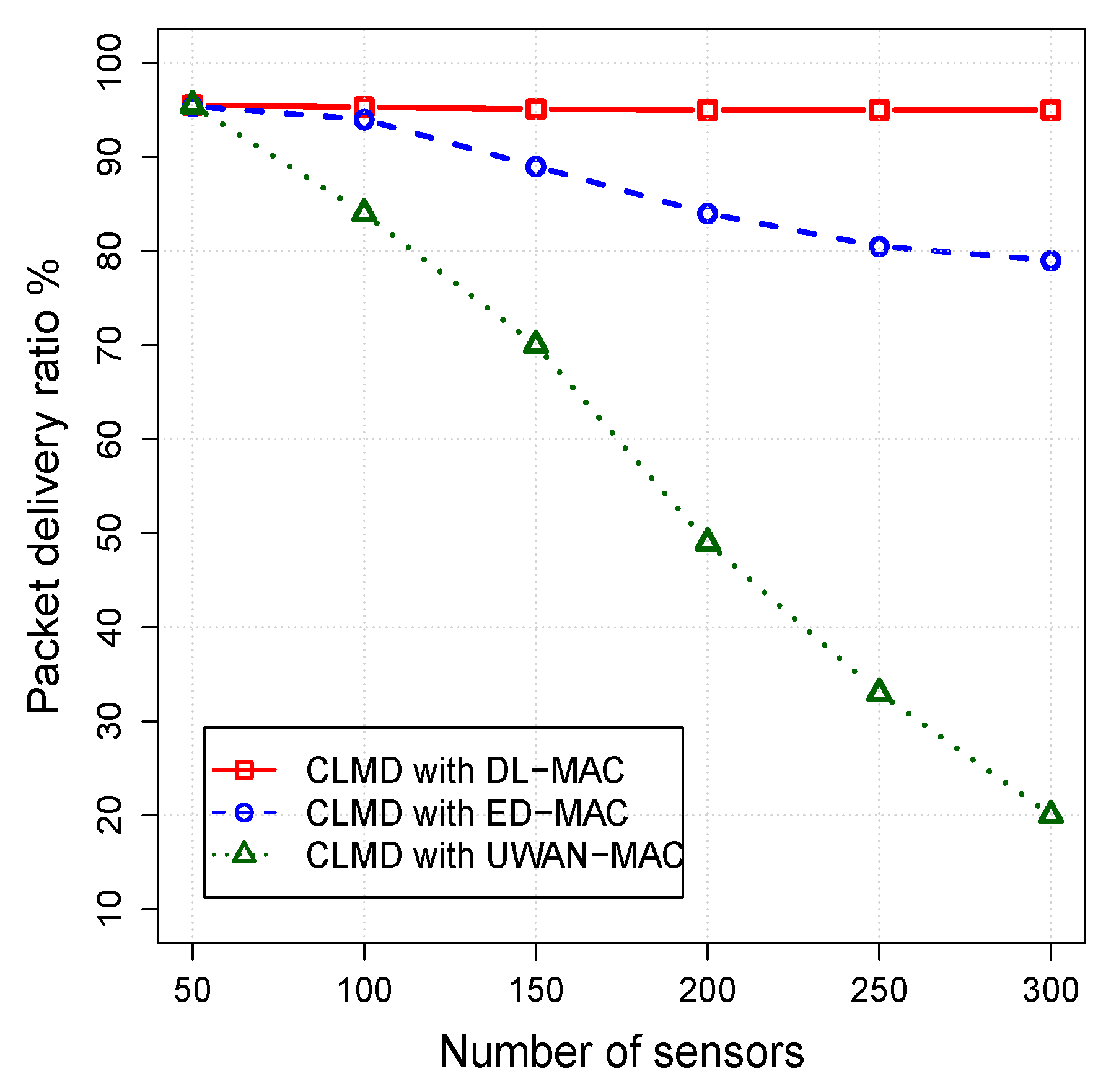
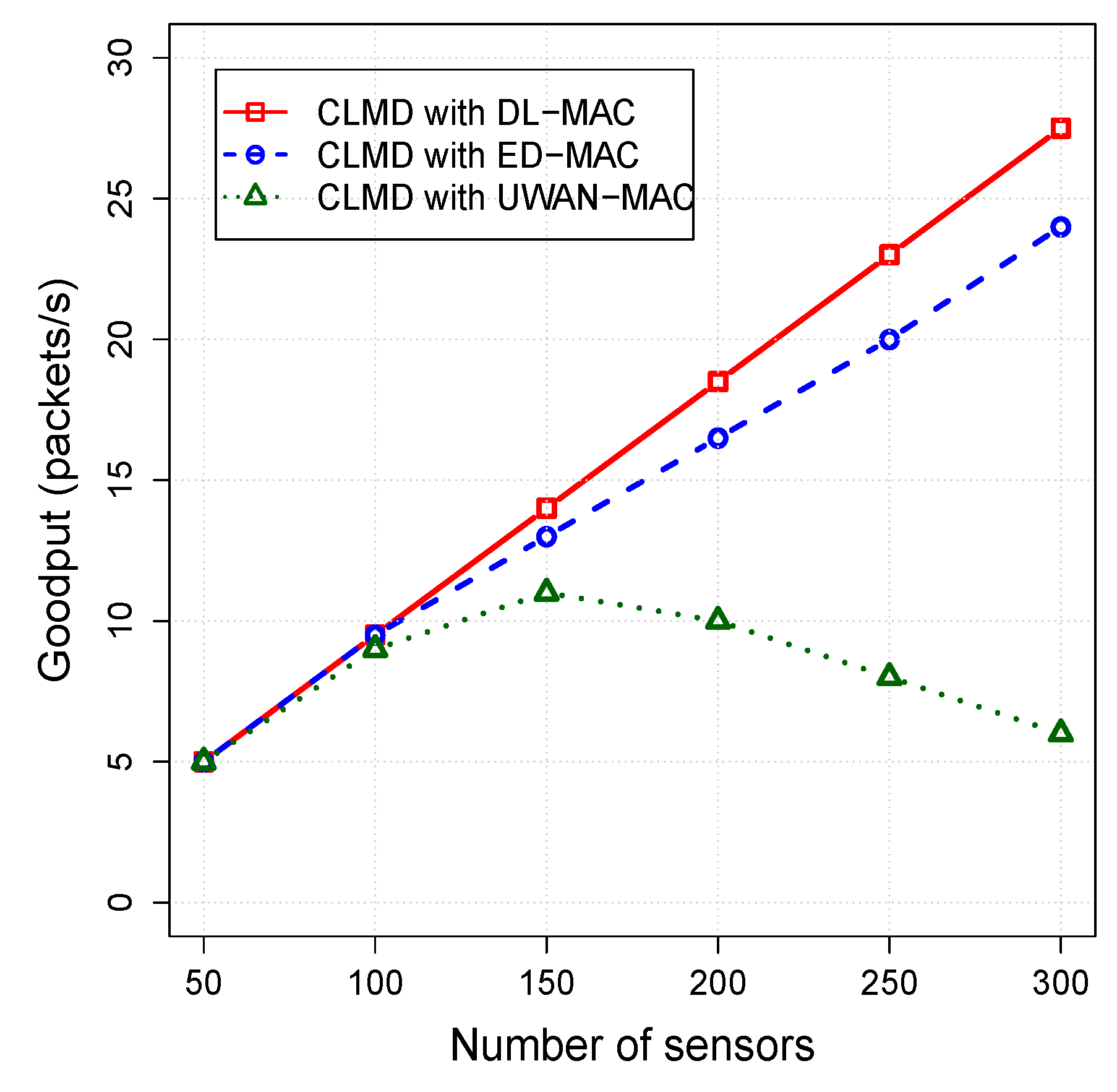
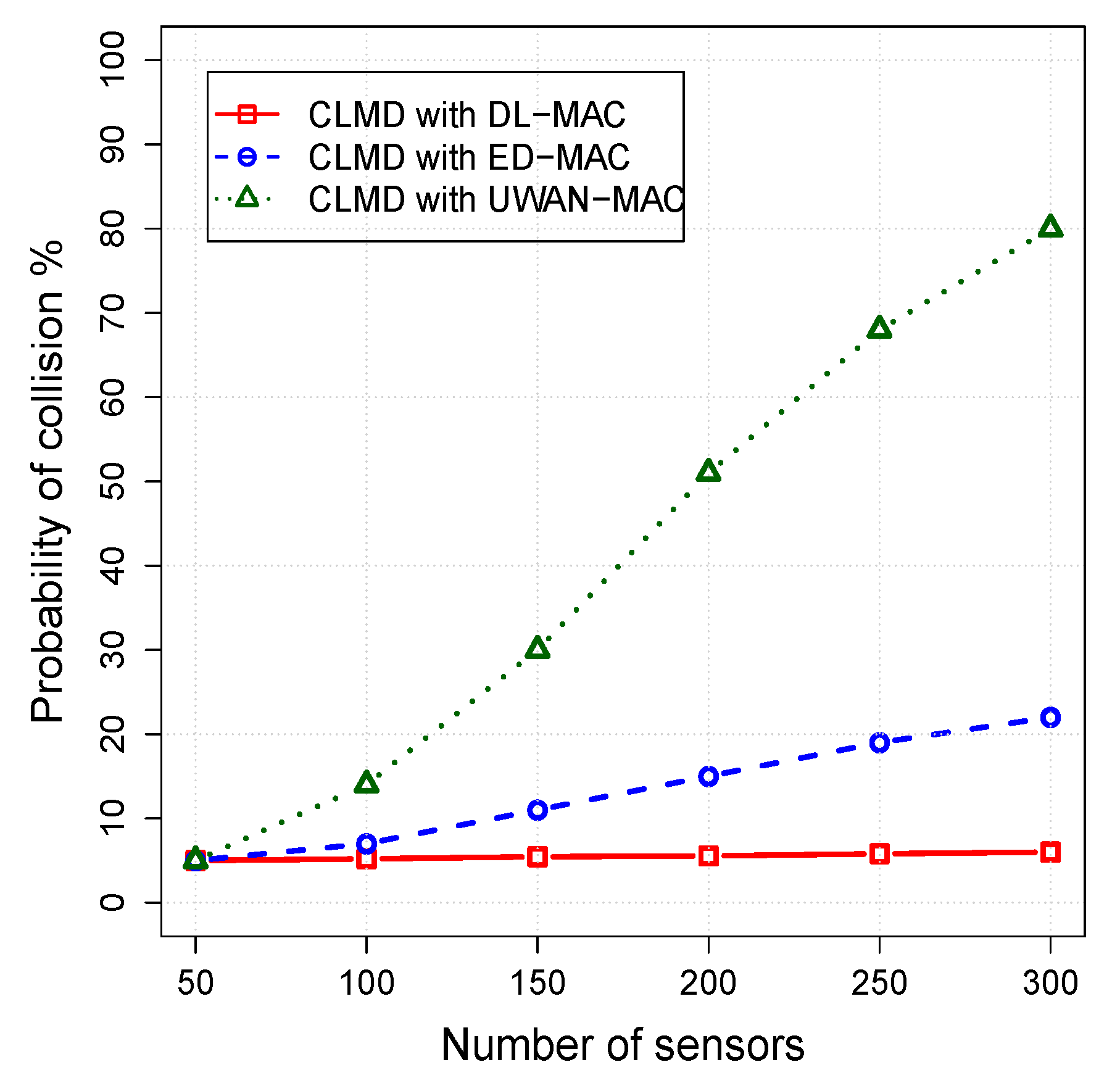
5.3.2. The Impact of Mac Layer on the Cross-Layer Protocol
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Liao, W.H.; Huang, C.C. SF-MAC: A spatially fair MAC protocol for underwater acoustic sensor networks. Sens. J. IEEE 2012, 12, 1686–1694. [Google Scholar] [CrossRef]
- Zhu, Y.; Peng, Z.; Cui, J.H.; Chen, H. Toward practical MAC design for underwater acoustic networks. IEEE Trans. Mob. Comput. 2015, 14, 872–886. [Google Scholar] [CrossRef]
- Lee, U.; Wang, P.; Noh, Y.; Vieira, L.F.; Gerla, M.; Cui, J.H. Pressure routing for underwater sensor networks. In Proceedings of the INFOCOM, 2010 Proceedings IEEE, San Diego, CA, USA, 14–19 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–9. [Google Scholar]
- Luo, J.; Fan, L.; Wu, S.; Yan, X. Research on Localization Algorithms Based on Acoustic Communication for Underwater Sensor Networks. Sensors 2018, 18, 67. [Google Scholar] [CrossRef] [PubMed]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. An efficient AUV-aided data collection in underwater sensor networks. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 281–288. [Google Scholar]
- Khan, J.U.; Cho, H.S. Data-gathering scheme using AUVS in large-scale underwater sensor networks: A multihop approach. Sensors 2016, 16, 1626. [Google Scholar] [CrossRef]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. Graph Colouring MAC Protocol for Underwater Sensor Networks. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 120–127. [Google Scholar]
- Pompili, D.; Akyildiz, I.F. A multimedia cross-layer protocol for underwater acoustic sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 2924–2933. [Google Scholar] [CrossRef]
- Lin, X.; Shroff, N.B.; Srikant, R. A tutorial on cross-layer optimization in wireless networks. IEEE J. Sel. Areas Commun. 2006, 24, 1452–1463. [Google Scholar]
- Chiang, M. Balancing transport and physical layers in wireless multihop networks: Jointly optimal congestion control and power control. IEEE J. Sel. Areas Commun. 2005, 23, 104–116. [Google Scholar]
- Alfouzan, F.A.; Ghoreyshi, S.M.; Shahrabi, A.; Ghahroudi, M.S. A Novel Cross-layer Mobile Data-gathering Protocol for Underwater Sensor Networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2011; pp. 379–411. [Google Scholar]
- Lloret, J. Underwater sensor nodes and networks. Sensors 2014, 13, 11782–11796. [Google Scholar] [CrossRef]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Lee, U.; Gerla, M. Optical-acoustic hybrid network toward real-time video streaming for mobile underwater sensors. Hoc Netw. 2019, 83, 1–7. [Google Scholar] [CrossRef]
- Schirripa Spagnolo, G.; Cozzella, L.; Leccese, F. Underwater Optical Wireless Communications: Overview. Sensors 2020, 20, 2261. [Google Scholar] [CrossRef] [PubMed]
- Madan, R.; Cui, S.; Lall, S.; Goldsmith, N.A. Cross-layer design for lifetime maximization in interference-limited wireless sensor networks. IEEE Trans. Wirel. Commun. 2006, 5, 3142–3152. [Google Scholar] [CrossRef]
- Wang, H.; Yang, Y.; Ma, M.; He, J.; Wang, X. Network lifetime maximization with cross-layer design in wireless sensor networks. IEEE Trans. Wirel. Commun. 2008, 7, 3759–3768. [Google Scholar] [CrossRef]
- Ahmad, A.; Wahid, A.; Kim, D. AEERP: AUV aided energy efficient routing protocol for underwater acoustic sensor network. In Proceedings of the 8th ACM workshop on Performance monitoring and measurement of heterogeneous wireless and wired networks, Barcelona, Spain, 3–8 November 2013; pp. 53–60. [Google Scholar]
- Khan, J.U.; Cho, H.S. A distributed data-gathering protocol using AUV in underwater sensor networks. Sensors 2015, 15, 19331–19350. [Google Scholar] [CrossRef]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T.; Khalily, M. Mobile data gathering with hop-constrained clustering in underwater sensor networks. IEEE Access 2019, 7, 21118–21132. [Google Scholar] [CrossRef]
- Chen, Y.S.; Lin, Y.W. Mobicast routing protocol for underwater sensor networks. IEEE Sens. J. 2012, 13, 737–749. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, H.V. Localization in underwater sensor networks: Survey and challenges. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 26 September 2006; ACM: New York, NY, USA, 2006; pp. 33–40. [Google Scholar]
- Porter, M.B.; Bucker, H.P. Gaussian beam tracing for computing ocean acoustic fields. J. Acoust. Soc. Am. 1987, 82, 1349–1359. [Google Scholar] [CrossRef]
- Llor, J.; Malumbres, M.P. Underwater wireless sensor networks: How do acoustic propagation models impact the performance of higher-level protocols? Sensors 2012, 12, 1312–1335. [Google Scholar] [CrossRef]
- Kim, Y.; Noh, Y.; Kim, K. RAR: Real-time acoustic ranging in underwater sensor networks. IEEE Commun. Lett. 2017, 21, 2328–2331. [Google Scholar] [CrossRef]
- Thompson, S.R. Sound Propagation Considerations for a Deep-Ocean Acoustic Network. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2009. [Google Scholar]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An energy-conserving depth-based layering mac protocol for underwater sensor networks. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Hilton Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Alfouzan, F.A.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An energy-conserving collision-free MAC protocol for underwater sensor networks. IEEE Access 2019, 7, 27155–27171. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.H.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges, Biloxi, MS, USA, 26–29 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–7. [Google Scholar]
- Park, M.K.; Rodoplu, V. UWAN-MAC: An energy-efficient MAC protocol for underwater acoustic wireless sensor networks. Ocean. Eng. IEEE J. 2007, 32, 710–720. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Acoustic propagation speed | 1500 m/s |
| Transmission power | 105 dB re Pa |
| Receiving power threshold | 10 dB re Pa |
| Sending power | 50 W |
| Receiving power | 0.158 W |
| Idle power | 0.008 W |
| Transmission range | 100 m |
| Packet generation rate | Every 100 s |
| Bit rate | 10 kbps |
| Node number | 100–500 |
| Deployment region | 1000 * 1000 * 300 |
| AUV speed | 4 m/s |
| AUV movement depth | 250 m |
| Sink coordinate | (0, 500, 0) |
| Data packet size | 1024 bits |
| Neighbour discovery interval | 60 s |
| Distributed clustering interval | 80 s |
| AUV discovery interval | 600 s |
| Normal operational interval | 7200 s |
| Initial energy of each node | 40,000 J |
| 0.067 s | |
| 0.067 s | |
| Simulation time for each run | 12 h |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alfouzan, F.A.; Ghoreyshi, S.M.; Shahrabi, A.; Ghahroudi, M.S. An AUV-Aided Cross-Layer Mobile Data Gathering Protocol for Underwater Sensor Networks. Sensors 2020, 20, 4813. https://doi.org/10.3390/s20174813
Alfouzan FA, Ghoreyshi SM, Shahrabi A, Ghahroudi MS. An AUV-Aided Cross-Layer Mobile Data Gathering Protocol for Underwater Sensor Networks. Sensors. 2020; 20(17):4813. https://doi.org/10.3390/s20174813
Chicago/Turabian StyleAlfouzan, Faisal Abdulaziz, Seyed Mohammad Ghoreyshi, Alireza Shahrabi, and Mahsa Sadeghi Ghahroudi. 2020. "An AUV-Aided Cross-Layer Mobile Data Gathering Protocol for Underwater Sensor Networks" Sensors 20, no. 17: 4813. https://doi.org/10.3390/s20174813
APA StyleAlfouzan, F. A., Ghoreyshi, S. M., Shahrabi, A., & Ghahroudi, M. S. (2020). An AUV-Aided Cross-Layer Mobile Data Gathering Protocol for Underwater Sensor Networks. Sensors, 20(17), 4813. https://doi.org/10.3390/s20174813