FY-3D MERSI On-Orbit Radiometric Calibration from the Lunar View

 , ,
, ,
Abstract
1. Introduction
2. Lunar Observation Data and Lunar Irradiance Model
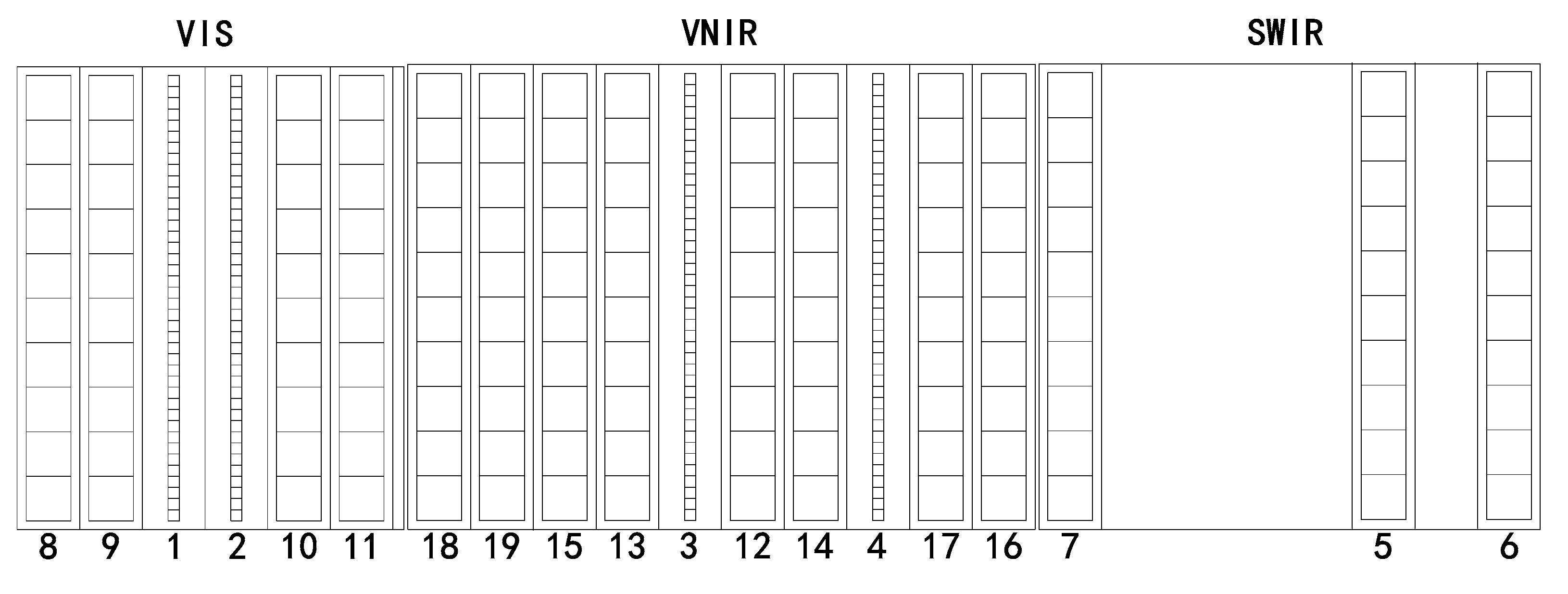
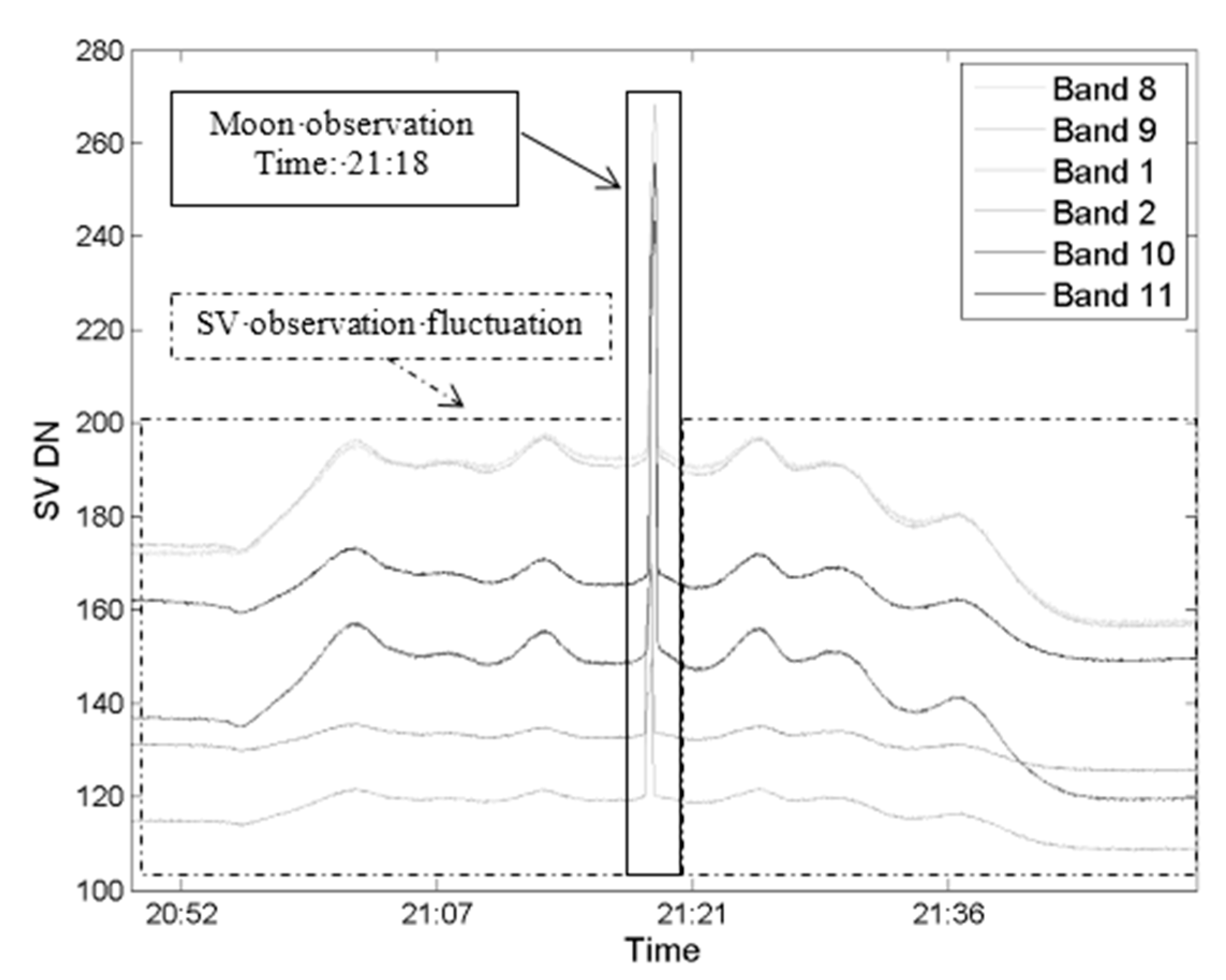
2.1. MERSI Lunar Observation Data
2.2. Lunar Irradiance Model
3. MERSI Lunar Irradiance and Absolute Calibration
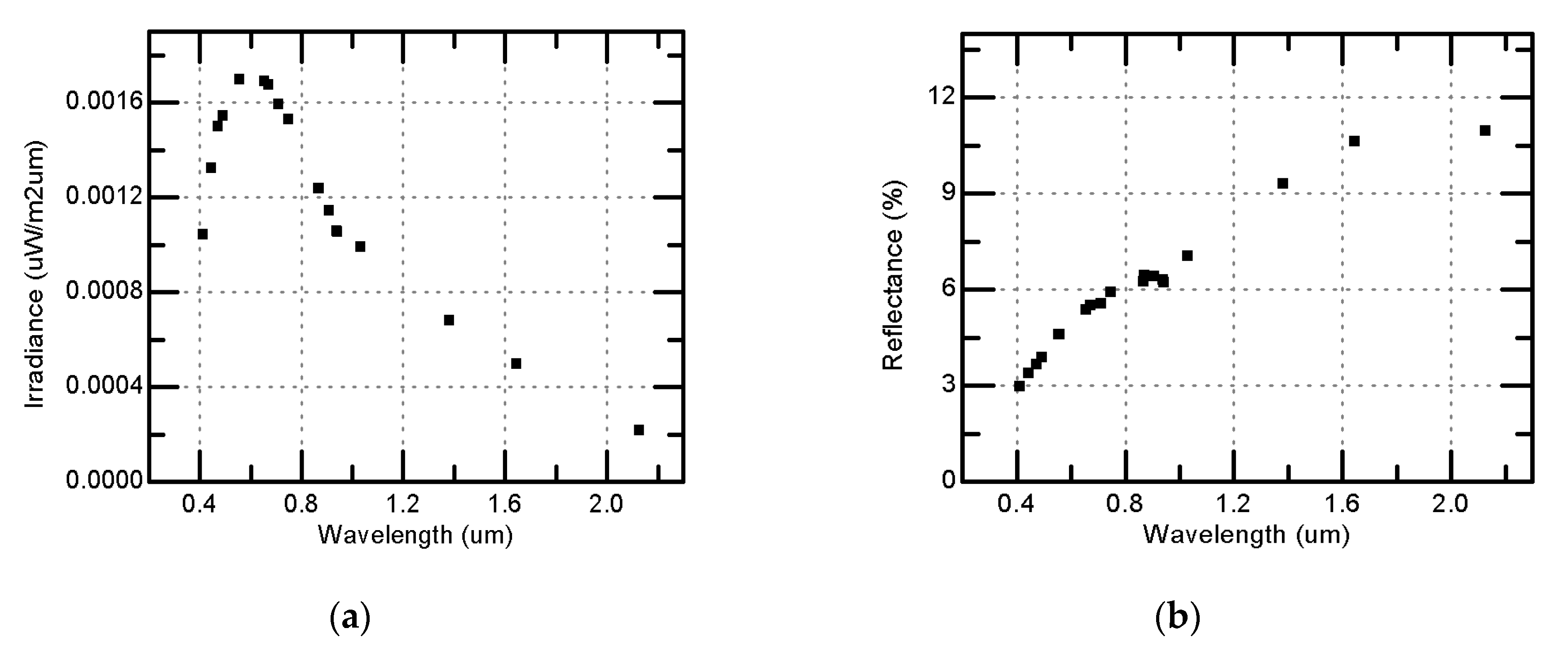
3.1. Single Pixel Irradiance
3.2. Lunar Full-Disk Irradiance
3.3. Lunar Calibration Coefficient
3.4. Oversampling Factor
3.5. Dark Current Count
4. Calibration Results and Discussion
4.1. Calibration Results
4.2. Discussion for the SWIR Bands
4.3. Discussion for the NIR Bands
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kieffer, H.H.; Stone, T.C. The Spectral Irradiance of the Moon. Astron. J. 2005, 129, 2887–2901. [Google Scholar] [CrossRef]
- Eplee, R.E.; Meister, G.; Patt, F.S.; Barnes, R.A.; Bailey, S.; Franz, B.A.; McClain, C.R. On-orbit calibration of SeaWiFS. Appl. Opt. 2012, 51, 8702–8730. [Google Scholar] [CrossRef] [PubMed]
- Xiong, X.; Sun, J.; Fulbright, J.; Wang, Z.; Butler, J.J. Lunar Calibration and Performance for S-NPP VIIRS Reflective Solar Bands. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1052–1061. [Google Scholar] [CrossRef]
- Wu, R.H.; Zhang, P.; Yang, Z.D.; Hu, X.Q.; Ding, L.; Chen, L. Monitor the radiance calibration of the remote sensing instrument by using the reflected lunar irradiance. J. Remote Sens. 2016, 20, 278–289, (In Chinese with English Abstract). [Google Scholar]
- Zhang, P.; Yang, J.; Dong, C.; Lu, N.; Yang, Z.; Shi, J. General introduction on payloads, ground segment and data application of Fengyun 3A. Front. Earth Sci. China 2009, 3, 367–373. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, P.; Gu, S.; Hu, X.; Tang, S.; Yang, L.; Xu, N.; Zhen, Z.; Wang, L.; Wu, Q.; et al. Capability of Fengyun-3D Satellite in Earth System Observation. J. Meteorol. Res. 2019, 33, 1113–1130. [Google Scholar] [CrossRef]
- Zhang, P.; Lu, Q.; Hu, X.; Gu, S.; Yang, L.; Min, M.; Chen, L.; Xu, N.; Sun, L.; Bai, W.; et al. Latest Progress of the Chinese Meteorological Satellite Program and Core Data Processing Technologies. Adv. Atmos. Sci. 2019, 36, 1027–1045. [Google Scholar] [CrossRef]
- Xu, N.; Niu, X.; Hu, X.; Wang, X.; Wu, R.; Chen, S.; Chen, L.; Sun, L.; Ding, L.; Yang, Z.; et al. Prelaunch Calibration and Radiometric Performance of the Advanced MERSI II on FengYun-3D. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4866–4875. [Google Scholar] [CrossRef]
- Chen, L.; Hu, X.; Xu, N.; Zhang, P. The Application of Deep Convective Clouds in the Calibration and Response Monitoring of the Reflective Solar Bands of FY-3A/MERSI (Medium Resolution Spectral Imager). Remote Sens. 2013, 5, 6958–6975. [Google Scholar] [CrossRef]
- Wang, L.; Hu, X.; Chen, L.; He, L. Consistent Calibration of VIRR Reflective Solar Channels Onboard FY-3A, FY-3B, and FY-3C Using a Multisite Calibration Method. Remote Sens. 2018, 10, 1336. [Google Scholar] [CrossRef]
- Xu, N.; Chen, L.; Wu, R.; Hu, X.; Sun, L.; Zhang, P. In-flight intercalibration of FY-3C visible channels with AQUA MODIS. In Proceedings of the Earth Observing Missions and Sensors: Development, Implementation, and Characterization III. SPIE Int. Soc. Opt. Eng. 2014, 9264, 926408. [Google Scholar] [CrossRef]
- Holsclaw, G.M.; McClintock, W.E.; Domingue, D.L.; Izenberg, N.R.; Blewett, D.T.; Sprague, A.L. A comparison of the ultraviolet to near-infrared spectral properties of Mercury and the Moon as observed by MESSENGER. Icarus 2010, 209, 179–194. [Google Scholar] [CrossRef]
- Kieffer, H.H. Photometric Stability of the Lunar Surface. Icarus 1997, 130, 323–327. [Google Scholar] [CrossRef]
- Eplee, J.R.E.; Barnes, R.A.; Patt, F.S.; Meister, G.; McClain, C.R. SeaWiFS Lunar Calibration Methodology after Six Years on Orbit. In Earth Observing Systems IX; International Society for Optics and Photonics: Washington, DC, USA, 2004; pp. 1–14. [Google Scholar]
- Xiong, X.; Angal, A.; Twedt, K.A.; Chen, H.; Link, D.O.; Geng, X.; Aldoretta, E.; Mu, Q. MODIS Reflective Solar Bands On-Orbit Calibration and Performance. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6355–6371. [Google Scholar] [CrossRef]
- Choi, T.; Shao, X.; Cao, C. On-orbit radiometric calibration of Suomi NPP VIIRS reflective solar bands using the Moon and solar diffuser. Appl. Opt. 2018, 57, 9533–9542. [Google Scholar] [CrossRef]
- McCorkel, J.; Thome, K.; Ong, L. Vicarious Calibration of EO-1 Hyperion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 400–407. [Google Scholar] [CrossRef]
- Zhang, P.; Lu, N.; Li, C.; Ding, L.; Zheng, X.; Zhang, X.; Hu, X.; Ye, X.; Ma, L.; Xu, N.; et al. Development of the Chinese Space-Based Radiometric Benchmark Mission LIBRA. Remote Sens. 2020, 12, 2179. [Google Scholar] [CrossRef]
- Miller, S.; Turner, R. A Dynamic Lunar Spectral Irradiance Data Set for NPOESS/VIIRS Day/Night Band Nighttime Environmental Applications. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2316–2329. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, P.; Hu, X.Q.; Chen, L.; Wang, Y.; Wang, W. Comparison of lunar irradiance models and validation of lunar observation on Earth. J. Remote Sens. 2017, 21, 864–870, (In Chinese with English Abstract). [Google Scholar]
- Zhang, L.; Zhang, P.; Hu, X.; Chen, L.; Min, M. A novel hyperspectral lunar irradiance model based on ROLO and mean equigonal albedo. Optik 2017, 142, 657–664. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, P.; Hu, X.; Chen, L.; Min, M.; Xu, N.; Wu, R. Radiometric Cross-Calibration for Multiple Sensors with the Moon as an Intermediate Reference. J. Meteorol. Res. 2019, 33, 925–933. [Google Scholar] [CrossRef]
- Wu, R.H.; Zhang, P.; Zheng, X.B.; Hu, X.Q.; Xu, N.; Zhang, L.; Qiao, Y.L. Data collection and irradiance conversion of lunar observation for MERSI. Opt. Precis. Eng. 2019, 27, 1819–1827, (In Chinese with English Abstract). [Google Scholar] [CrossRef]
- Wagner, S.C.; Hewison, T.; Stone, T.; Lachérade, S.; Fougnie, B.; Xiong, X. A summary of the joint GSICS – CEOS/IVOS lunar calibration workshop: Moving towards intercalibration using the Moon as a transfer target. In Proceedings SPIE 9639, Sensors, Systems, and Next-Generation Satellites; International Society for Optics and Photonics: Washington, DC, USA, 2015. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.; Mandel, H. The Solar Spectral Irradiance from 200 to 2400 nm as Measured by the SOLSPEC Spectrometer from the Atlas and Eureca Missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- D, X.; Xu, N.; Hu, X.Q.; Wu, R.H.; Niu, X.H.; Wang, X.H.; He, Y.Q. On-Orbit Detection and Correction of Crosstalk Effect of FY-3D MERSI-II Signals. Acta Opt. Sin. 2020, 40, 1011001. [Google Scholar]
- Xu, N.; Wu, R.H.; Hu, X.Q.; Chen, L.; Wang, L.; Sun, L. Integrated Method for On-Obit Wide Dynamic Vicarious Calibration of FY-3C MERSI Reflective Solar Bands. Acta Opt. Sin. 2015, 35, 1228001. [Google Scholar] [CrossRef]
- Ma, L.; Zhao, Y.; Woolliams, E.; Dai, C.; Wang, N.; Liu, Y.; Li, L.; Wang, X.; Gao, C.; Li, C.; et al. Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples. Remote Sens. 2020, 12, 1696. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Center Wavelength (μm) | Band Width (nm) | Nadir FOV (m) | Ltyp 1/Ttyp | SNR 2/NEdT | Dynamic Range |
|---|---|---|---|---|---|---|
| b01 | 0.470 | 50 | 250 | 35.3 | 100 | 0–90% |
| b02 | 0.550 | 50 | 250 | 29.0 | 100 | 0–90% |
| b03 | 0.650 | 50 | 250 | 22 | 100 | 0–90% |
| b04 | 0.865 | 50 | 250 | 25 | 100 | 0–90% |
| b05 | 1.38 | 30 | 1000 | 6 | 100 | 0–90% |
| b06 | 1.64 | 50 | 1000 | 7.3 | 200 | 0–90% |
| b07 | 2.13 | 50 | 1000 | 1.2 | 100 | 0–90% |
| b08 | 0.412 | 20 | 1000 | 44.9 | 300 | 0–30% |
| b09 | 0.490 | 20 | 1000 | 32.1 | 300 | 0–30% |
| b10 | 0.555 | 20 | 1000 | 36.8 | 500 | 0–30% |
| b11 | 0.670 | 20 | 1000 | 27.8 | 500 | 0–30% |
| b12 | 0.709 | 20 | 1000 | 19.2 | 500 | 0–30% |
| b13 | 0.746 | 20 | 1000 | 24 | 500 | 0–30% |
| b14 | 0.865 | 20 | 1000 | 17.8 | 500 | 0–30% |
| b15 | 0.905 | 20 | 1000 | 22.2 | 200 | 100% |
| b16 | 0.936 | 20 | 1000 | 20 | 100 | 100% |
| b17 | 0.940 | 50 | 1000 | 15.0 | 200 | 100% |
| b18 | 1.03 | 20 | 1000 | 5.4 | 100 | 100% |
| b20 | 3.8 | 180 | 1000 | 300 | 0.25 | 200–350 K |
| b21 | 4.050 | 155 | 1000 | 300 | 0.25 | 200–380 K |
| b22 | 7.2 | 500 | 1000 | 270 | 0.30 | 180–280 K |
| b23 | 8.550 | 300 | 1000 | 270 | 0.25 | 180–300 K |
| b24 | 10.8 | 1000 | 250 | 300 | 0.4 | 180–330 K |
| b25 | 12.0 | 1000 | 250 | 300 | 0.4 | 180–330 K |
| Date | Absolute Phase Angle | Selenographic Longitude of the Sun | Selenographic Latitude of the Observer | Selenographic Longitude of the Observer |
|---|---|---|---|---|
| 29 December 2017 | 44.3° | 39.5° | −4.5° | 6.7° |
| Band | Pre-Launch DC | Lunar Calibration DC | DC Deviation |
|---|---|---|---|
| b01 | 128.0 | 124.8 | −3.2 |
| b02 | 134.6 | 131.0 | −3.5 |
| b03 | 248.4 | 247.8 | −0.6 |
| b04 | 143.6 | 148.6 | 5.0 |
| b05 | 120.6 | 144.4 | 23.8 |
| b06 | 79.5 | 126.0 | 46.5 |
| b07 | 59.9 | 144.1 | 84.2 |
| b08 | 195.5 | 195.5 | 0.0 |
| b09 | 181.1 | 199.5 | 18.5 |
| b10 | 136.1 | 155.7 | 19.6 |
| b11 | 171.4 | 166.9 | −4.5 |
| b12 | 186.5 | 203.4 | 16.8 |
| b13 | 198.4 | 204.0 | 5.6 |
| b14 | 195.5 | 198.9 | 3.4 |
| b15 | 150.5 | 172.6 | 22.1 |
| b16 | 173.2 | 171.6 | −1.6 |
| b17 | 237.0 | 238.5 | 1.5 |
| b18 | 237.2 | 239.0 | 1.8 |
| b19 | 137.4 | 197.3 | 60.0 |
| Band | Pre-Launch Coefficient | Lunar Calibration Coefficient | Relative Deviation |
|---|---|---|---|
| b01 | 0.02542 | 0.02671 | 5.1% |
| b02 | 0.02682 | 0.02742 | 2.2% |
| b03 | 0.02783 | 0.02992 | 7.5% |
| b04 | 0.02629 | 0.03010 | 14.5% |
| b05 | 0.02581 | 0.04016 | 55.6% |
| b06 | 0.02313 | 0.02978 | 28.8% |
| b07 | 0.02401 | 0.02275 | −5.3% |
| b08 | 0.008452 | 0.010386 | 22.9% |
| b09 | 0.008869 | 0.009510 | 7.2% |
| b10 | 0.008430 | 0.008789 | 4.3% |
| b11 | 0.010830 | 0.010972 | 1.3% |
| b12 | 0.009302 | 0.010683 | 14.8% |
| b13 | 0.008765 | 0.009360 | 6.8% |
| b14 | 0.008661 | 0.009204 | 6.3% |
| b15 | 0.008634 | 0.009650 | 11.8% |
| b16 | 0.02717 | 0.02997 | 10.3% |
| b17 | 0.02745 | 0.03292 | 19.9% |
| b18 | 0.0286 | 0.03233 | 13.0% |
| b19 | 0.0295 | 0.06351 | 115.3% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Zhang, P.; Xu, N.; Hu, X.; Chen, L.; Zhang, L.; Yang, Z. FY-3D MERSI On-Orbit Radiometric Calibration from the Lunar View. Sensors 2020, 20, 4690. https://doi.org/10.3390/s20174690
Wu R, Zhang P, Xu N, Hu X, Chen L, Zhang L, Yang Z. FY-3D MERSI On-Orbit Radiometric Calibration from the Lunar View. Sensors. 2020; 20(17):4690. https://doi.org/10.3390/s20174690
Chicago/Turabian StyleWu, Ronghua, Peng Zhang, Na Xu, Xiuqing Hu, Lin Chen, Lu Zhang, and Zhongdong Yang. 2020. "FY-3D MERSI On-Orbit Radiometric Calibration from the Lunar View" Sensors 20, no. 17: 4690. https://doi.org/10.3390/s20174690
APA StyleWu, R., Zhang, P., Xu, N., Hu, X., Chen, L., Zhang, L., & Yang, Z. (2020). FY-3D MERSI On-Orbit Radiometric Calibration from the Lunar View. Sensors, 20(17), 4690. https://doi.org/10.3390/s20174690