Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction


Abstract
1. Introduction
2. Wavelet-Based Kalman Smoothing Method
2.1. Wavelet Transformation and Compression
2.2. Kalman Prediction and Smoothing
2.2.1. Online Forward Prediction Model
2.2.2. Offline Backward Smoothing Model
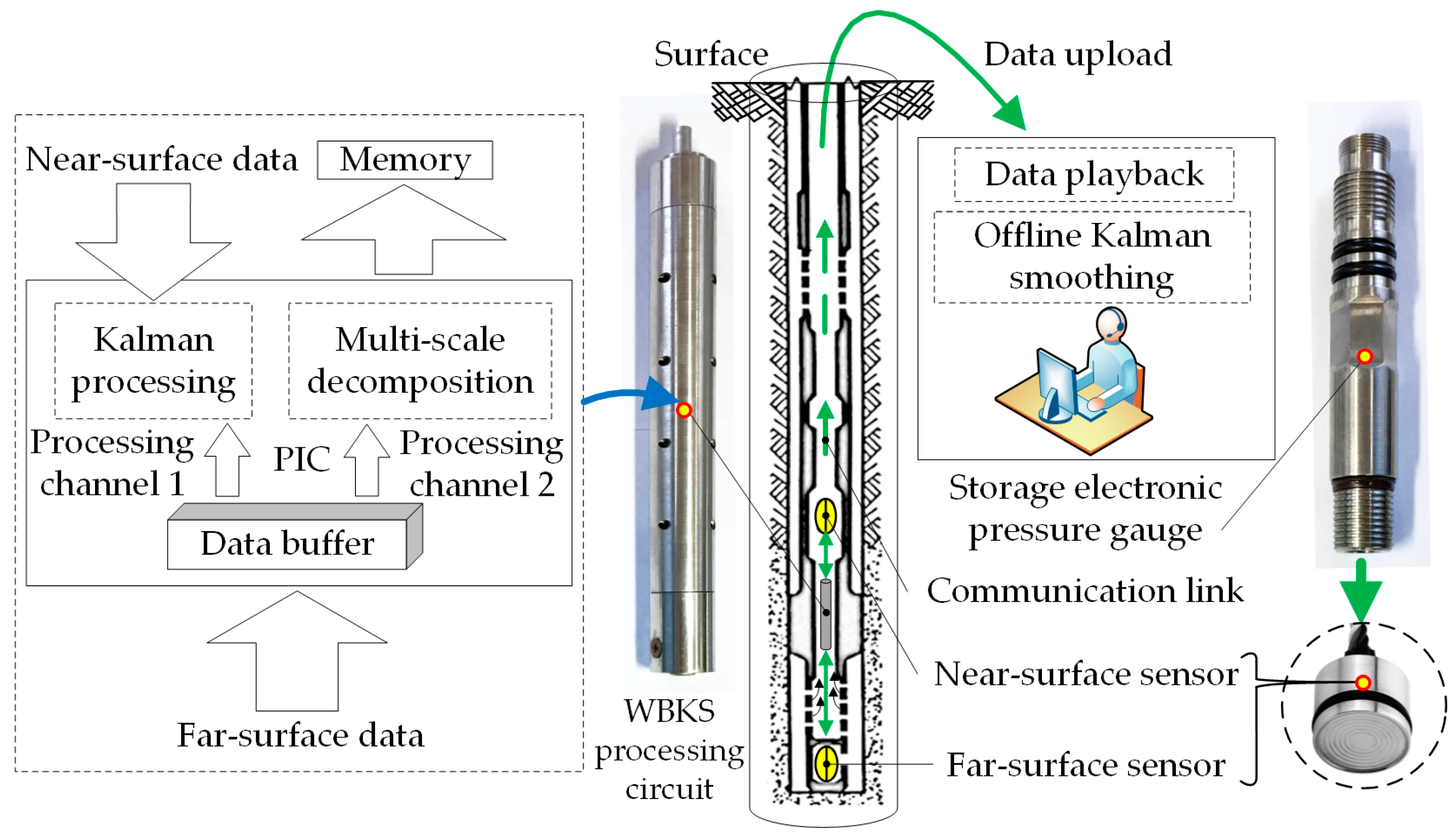
3. Wavelet-Based Kalman Smoothing Measurement System
- Perform filtering, shaping, and amplification of analog signals collected by Keller sensors.
- Convert the pressure analog signals into digital signals through an AD converter.
- Transmit the digital signal to the PIC processor, complete the real-time Kalman forward prediction, and wavelet decompose the pressure signal of one working stage.
- Store the standard data, the predicted data, and the wavelet coefficients of the data in each working stage into the memory chip.
- Use the ground software to download all the above stored data and offline Kalman backward smooth the predicted data.
- Use wavelet coefficients to restore the data, and analyze and compare the data reconstructed by wavelet coefficients with the standard data.
| Algorithm 1 WBKS algorithm |
| Pretreatment: Normalize the data length of all samples to L. Model Training: Input: m-th well-testing training sample , [1,15]. Steps: 1: Use PSO to obtain and under the minimum RMSE fitness . 2: Decompose within a given range of decomposition scale and vanishing moments . 3: Get the high-frequency and low-frequency coefficients of the highest decomposition layer, perform Birge–Massart soft threshold processing, and obtain the wavelet reconstruction data . 4: Calculate the correlation between and , where . 5: Repeat steps 1–4, select and with minimum as the optimal Kalman parameter, denote them as and ; select M and N with maximum as the optimal combination of wavelet reconstruction parameters, denote them as and . Model Testing: Input: The n-th data point of testing sample . Steps: 1: Use and to calculate the predicted value of and restore it. 2: If n = L, do wavelet-based -scale-decomposition, soft threshold filtering, and reconstruction on , save the reconstructed wavelet coefficients. |
| 3: Use Formula (14) to smooth and obtain . |
4. Experimental Simulations and Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Al-Nahdi, O.A.; Al-Nuaim, S.A.; Siu, L.W.; Al-Shammari, A.T. Three-Dimensional Reservoir Pressure Determination Using Real Time Pressure Data from Downhole Gauges. U.S. Patent 9,896,930, 20 February 2018. [Google Scholar]
- Bazargan, H.; Adibifard, M. A Stochastic Well-Test Analysis on Transient Pressure Data Using Iterative Ensemble Kalman Filter. Neural Comput. Appl. 2017, 31, 3227–3243. [Google Scholar] [CrossRef]
- Wang, F.; Zheng, S. Unknown Rate History Calculation from Down-hole Transient Pressure Data Using Wavelet Transform. Transp. Porous Media 2013, 96, 547–556. [Google Scholar] [CrossRef]
- Feng, X.; Feng, Q.; Li, S.; Hou, X.; Liu, S. A Deep-Learning-Based Oil-Well-Testing Stage Interpretation Model Integrating Multi-Feature Extraction Methods. Energies 2020, 13, 2042. [Google Scholar] [CrossRef]
- Ma, T.; Chen, P.; Han, X. Simulation and interpretation of the pressure response for formation testing while drilling. J. Nat. Gas Sci. Eng. 2015, 23, 259–271. [Google Scholar] [CrossRef]
- Kikani, J.; He, M. Multi-resolution analysis of long-term pressure transient data using wavelet methods. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 27–30 September 1998. [Google Scholar]
- Ouyang, L.B.; Kikani, J. New Approaches for Permanent Downhole Gauge (PDG) Data Processing. Liq. Fuels Technol. 2005, 23, 1247–1263. [Google Scholar] [CrossRef]
- Teixeira, B.O.S.; Castro, W.S.; Teixeira, A.F.; Aguirre, L.A. Data-driven soft sensor of downhole pressure for a gas-lift oil well. Control Eng. Pract. 2014, 22, 34–43. [Google Scholar] [CrossRef]
- Zhao, Y.; Ran, L.; Wu, F. Frequency domain filtering correction of log data from a corkscrew borehole. Well Logging Technol. 2012, 36, 499–503. [Google Scholar]
- Kuncar, A. Basic Techniques for Filtering Noise Out of Accelerometer Data. In Proceedings of the 26th DAAAM International Symposium, Vienna, Austria, 1 January 2016; pp. 1122–1128. [Google Scholar]
- Reis, M.S.; Saraiva, P.M.; Bakshi, B.R. Denoising and Signal-to-Noise Ratio Enhancement: Wavelet Transform and Fourier Transform. In Comprehensive Chemometrics; Elsevier: Oxford, UK, 2009; pp. 25–55. [Google Scholar]
- Yiqun, Z.; Shiyi, Z.; Qi, W. Interpretation of transient temperature data from Permanent Down-hole Gauges. J. Geophys. Eng. 2017, 4, 739–750. [Google Scholar]
- Morlet, J.; Arens, G.; Fourgeau, E.; Glard, D. Wave propagation and sampling theory—Part I: Complex signal and scattering in multilayered media. Geophysics 2013, 47, 203. [Google Scholar] [CrossRef]
- Gonzalez, T.F.; Camacho, V.R.; Escalante, R.B. Truncation Denoising in transient pressure tests. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 3 October 1999; pp. 31–46. [Google Scholar]
- Sahni, I.; Horne, R.N. Multiresolution Wavelet Analysis for Improved Reservoir Description. SPE Reserv. Eval. Eng. 2005, 8, 53–69. [Google Scholar] [CrossRef]
- Zhang, W.; Shi, Y. Application of wavelet neural network in the acoustic logging-while-drilling waveform data process. J. Commun. Comput. 2007, 4, 29–34. [Google Scholar]
- Cooper, G.R.J.; Cowan, D.R. Blocking geophysical borehole log data using the continuous wavelet transform. Explor. Geophys. 2018, 40, 233–236. [Google Scholar]
- Wang, F.; Zhang, Y.; Zheng, S.; Kong, D. Oil Flow Rate History Reconstruction using Downhole Transient Temperature Data with Wavelet Transform. In Proceedings of the ECMOR XV-15th European Conference on the Mathematics of Oil Recovery, Amsterdam, The Netherlands, 29 August–1 September 2016. [Google Scholar]
- Athichanagorn, S.; Horne, R.N.; Kikani, J. Processing and interpretation of long-term data acquired from permanent pressure gauges. SPE Reserv. Eval. Eng. 2002, 5, 384–391. [Google Scholar] [CrossRef]
- Amrita, S.; Saumen, M.; Tiwari, R. Selection of optimum wavelet in CWT analysis of geophysical downhole data Selection of optimum wavelet in CWT analysis of geophysical downhole data. J. Indian Geophys. Union 2017, 21, 153–166. [Google Scholar]
- Liu, Z.; Liu, L.; Zhang, J. Signal feature extraction and quantitative evaluation of metal magnetic memory testing for oil well casing based on data preprocessing technique. Abstr. Appl. Anal. 2014, 2014, 902304. [Google Scholar] [CrossRef]
- Zheng, S.; Li, X. Individual well flowing rate recovery from PDG transient pressure with either assigned daily rate or total cumulative production of the well or group of wells through wavelet approach. J. Pet. Sci. Eng. 2009, 68, 277–286. [Google Scholar]
- Wang, F.; Zheng, S. Diagnostic of changes in reservoir properties from long-term transient pressure data with wavelet transform. J. Pet. Sci. Eng. 2016, 146, 921–931. [Google Scholar] [CrossRef]
- Kwasniok, F. Estimation of noise parameters in dynamical system identification with Kalman filters. Phys. Rev. E 2012, 86, 036214. [Google Scholar] [CrossRef]
- Zeng, N.; Wang, Z.; Li, Y.; Du, M.; Liu, X. A Hybrid EKF and Switching PSO Algorithm for Joint State and Parameter Estimation of Lateral Flow Immunoassay Models. IEEE/ACM Trans. Comput. Biol. Bioinform. 2012, 9, 321–329. [Google Scholar]
- Stroud, J.R.; Stein, M.L.; Lesht, B.M.; Schwab, D.J.; Beletsky, D. An Ensemble Kalman Filter and Smoother for Satellite Data Assimilation. J. Am. Stat. Assoc. 2010, 105, 978–990. [Google Scholar] [CrossRef]
- ELSheikh, A.H.; Pain, C.C.; Fang, F.; Gomes, J.L.; Navon, I.M. Parameter estimation of subsurface flow models using iterative regularized ensemble Kalman filter. Stoch. Environ. Res. Risk Assess. 2013, 27, 877–897. [Google Scholar] [CrossRef]
- Chou, C.M.; Wang, R.Y. Application of wavelet-based multi-model Kalman filters to real-time flood forecasting. Hydrol. Process. 2004, 18, 987–1008. [Google Scholar] [CrossRef]
- Nygaard, G.; Naevdal, G.; Mylvaganam, S. Evaluating nonlinear Kalman filters for parameter estimation in reservoirs during petroleum well drilling. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Ahmadi, R.; Shahrabi, J.; Aminshahidy, B. Automatic well-testing model diagnosis and parameter estimation using artificial neural networks and design of experiments. J. Pet. Explor. Prod. Technol. 2017, 7, 759–783. [Google Scholar] [CrossRef]
- Li, Y.J.; Kokkinaki, A.; Darve, E.T.; Kitanidis, P.K. Smoothing-based compressed state Kalman filter for joint state-parameter estimation: Applications in reservoir characterization and CO2 storage monitoring. Water Resour. Res. 2017, 53, 7190–7207. [Google Scholar] [CrossRef]
- Harlim, J.; Mahdi, A.; Majda, A.J. An ensemble Kalman filter for statistical estimation of physics constrained nonlinear regression models. J. Comput. Phys. 2014, 257, 782–812. [Google Scholar] [CrossRef]
- Kim, S.; Lee, C.; Lee, K.; Choe, J. Aquifer characterization of gas reservoirs using Ensemble Kalman filter and covariance localization. J. Pet. Sci. Eng. 2016, 146, 446–456. [Google Scholar] [CrossRef]
- Wang, Y.; Li, M. Reservoir history matching and inversion using an iterative ensemble Kalman filter with covariance localization. Pet. Sci. 2011, 8, 316–327. [Google Scholar] [CrossRef]
- Raghu, A.; Yang, X.; Khare, S.; Prakash, J.; Huang, B.; Prasad, V. Reservoir history matching using constrained ensemble Kalman filtering. Can. J. Chem. Eng. 2018, 96, 145–159. [Google Scholar] [CrossRef]
- Xue, Q.; Leung, H.; Wang, R.; Liu, B.; Wu, Y. Continuous Real-Time Measurement of Drilling Trajectory with New State-Space Models of Kalman Filter. IEEE Trans. Instrum. Measur. 2016, 65, 144–154. [Google Scholar] [CrossRef]
- Soltani, S.; Kordestani, M.; Aghaee, P.K.; Saif, M. Improved Estimation for Well-Logging Problems Based on Fusion of Four Types of Kalman Filters. IEEE Trans. Geosci. Remote 2018, 56, 647–654. [Google Scholar] [CrossRef]
- Mahdianfar, H.; Pavlov, A.; Aamo, O.M. Joint unscented Kalman filter for state and parameter estimation in Managed Pressure Drilling. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013. [Google Scholar]
- Adibifard, M.; Bashiri, G.; Roayaei, E.; Emad, M.A. Using Particle Swarm Optimization (PSO) Algorithm in Nonlinear Regression Well Test Analysis and Its Comparison with Levenberg-Marquardt Algorithm. Int. J. Appl. Metaheuristic Comput. 2016, 7, 1–23. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, J.; Wang, Y.; Pan, S. PSO-BP Neural Network in Reservoir Parameter Dynamic Prediction. In Proceedings of the 2011 Seventh International Conference on Computational Intelligence and Security, Hainan, China, 3–4 December 2011; pp. 123–126. [Google Scholar]
- Lang, J.; Zhao, J. Modeling and optimization for oil well production scheduling. Chin. J. Chem. Eng. 2016, 24, 1423–1430. [Google Scholar] [CrossRef]
- Obidin, M.V.; Serebrovski, A.P. Signal denoising with the use of the wavelet transform and the Kalman filter. J. Commun. Technol. Electron. 2014, 59, 1440–1445. [Google Scholar] [CrossRef]
- Hong, L.; Cheng, G.; Chui, C. A filter-bank-based Kalman filtering technique for wavelet estimation and decomposition of random signals. IEEE Trans. Circuits Syst. II 1998, 45, 237–241. [Google Scholar] [CrossRef]
- Soltani, S.; Kordestani, M.; Aghaee, P.K. New estimation methodologies for well logging problems via a combination of fuzzy Kalman filter and different smoothers. J. Pet. Sci. Eng. 2016, 145, 704–710. [Google Scholar] [CrossRef]
- Wavelets Information. The MathWorks, Inc.. Available online: https://ww2.mathworks.cn/help/wavelet/ref/waveinfo.html (accessed on 29 June 2020).
- Kennedy, J.E.; Eberhart, R.C. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No./i | M | N | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 5 | 6 | 0.007869 | 0.743473 | 0.260655 | 0.736068 | 0.247624 | 0.00996 | 0.049996 |
| 2 | 5 | 6 | 0.020657 | 0.355812 | 0.285103 | 0.376231 | 0.273351 | 0.057387 | 0.041222 |
| 3 | 6 | 6 | 0.016471 | 0.554035 | 0.276538 | 0.546707 | 0.256993 | 0.013227 | 0.070677 |
| 4 | 6 | 6 | 0.007137 | 0.614972 | 0.189785 | 0.614416 | 0.179372 | 0.000904 | 0.054869 |
| 5 | 6 | 6 | 0.019565 | 0.445155 | 0.394536 | 0.464322 | 0.378328 | 0.043057 | 0.04108 |
| 6 | 6 | 6 | 0.016843 | 0.361023 | 0.120409 | 0.377780 | 0.115105 | 0.046416 | 0.044053 |
| 7 | 6 | 6 | 0.012392 | 0.387651 | 0.135597 | 0.399926 | 0.128853 | 0.031665 | 0.049736 |
| 8 | 6 | 6 | 0.013925 | 0.573745 | 0.236822 | 0.580321 | 0.224591 | 0.011462 | 0.051645 |
| 9 | 6 | 6 | 0.009512 | 0.444279 | 0.159682 | 0.452616 | 0.151253 | 0.018765 | 0.05279 |
| 10 | 6 | 6 | 0.011399 | 0.598858 | 0.253192 | 0.606597 | 0.241222 | 0.012923 | 0.047277 |
| 11 | 6 | 6 | 0.012743 | 0.615074 | 0.189796 | 0.607654 | 0.178122 | 0.012065 | 0.061505 |
| 12 | 6 | 6 | 0.011399 | 0.598858 | 0.253192 | 0.606597 | 0.241222 | 0.012923 | 0.047277 |
| 13 | 6 | 6 | 0.023324 | 0.673282 | 0.342663 | 0.663130 | 0.320238 | 0.015079 | 0.065445 |
| 14 | 7 | 6 | 0.015583 | 0.355828 | 0.091037 | 0.371376 | 0.086595 | 0.043696 | 0.048802 |
| 15 | 7 | 6 | 0.011324 | 0.420021 | 0.107204 | 0.431263 | 0.101705 | 0.026765 | 0.051297 |
| Indicators\Results | Local Optimal (Q,R) | Near-Surface Sample | Robust Kalman | Improved Particle Swarm | Wavelet Denoising | Forward Prediction (Opt/Exp) | Backward Smoothing (Opt/Exp) |
|---|---|---|---|---|---|---|---|
| MAD_0.05 | (0.0134,2.0081) | 1420.701 | 949.979 | 311.85 | 361.432 | 349.857/391.832 | 210.616/347.559 |
| SD_0.05 | 1783.52 | 1192.869 | 517.568 | 480.205 | 524.804/513.565 | 381.788/463.783 | |
| SNR_0.05 | 14.507 | 18.001 | 25.251 | 25.901 | 25.13/25.318 | 27.891/26.203 | |
| MAD_0.1 | (0.00534,1.996) | 2831.115 | 1887.271 | 485.871 | 706.201 | 667.772/786.888 | 395.003/650.600 |
| SD_0.1 | 3550.103 | 2368.319 | 753.082 | 905.461 | 894.251/1003.713 | 561.863/835.376 | |
| SNR_0.1 | 8.528 | 12.044 | 21.996 | 20.396 | 20.504/19.501 | 24.54/21.095 | |
| MAD_0.15 | (0.0024,2.9664) | 4276.761 | 2858.103 | 581.319 | 1049.631 | 1003.506/1180.530 | 590.073/891.840 |
| SD_0.15 | 5351.622 | 3575.044 | 919.306 | 1333 | 1279.415/1495.191 | 783.751/1132.575 | |
| SNR_0.15 | 4.964 | 8.468 | 20.264 | 17.037 | 17.393/16.039 | 21.649/18.452 | |
| MAD_0.2 | (0.0029,5.9815) | 5720.959 | 3851.621 | 685.573 | 1437.723 | 1351.764/1611.532 | 779.812/1144.366 |
| SD_0.2 | 7163.155 | 4813.474 | 1123.106 | 1818.597 | 1715.289/2032.833 | 1006.072/1439.780 | |
| SNR_0.2 | 2.431 | 5.884 | 18.525 | 14.339 | 14.864/13.371 | 19.481/16.367 | |
| MAD_0.25 | (0.0102,4.5979) | 7131.965 | 4758.136 | 749.637 | 1784.697 | 1671.759/1968.838 | 962.176/1314.854 |
| SD_0.25 | 8932.155 | 5964.693 | 1225.635 | 2251.017 | 2106.425/2480.451 | 1224.626/1658.106 | |
| SNR_0.25 | 0.514 | 4.021 | 17.761 | 12.484 | 13.061/11.641 | 17.768/15.138 | |
| MAD_0.3 | (0.00137,2.0119) | 8525.206 | 5694.416 | 1033.786 | 2084.213 | 1958.073/2348.266 | 1148.449/1722.288 |
| SD_0.3 | 10,700.338 | 7144.135 | 1407.038 | 2620.212 | 2448.163/2946.728 | 1439.265/2148.962 | |
| SNR_0.3 | −1.055 | 2.454 | 16.567 | 11.166 | 11.756/10.146 | 16.37/12.888 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Feng, Q.; Li, S.; Hou, X.; Zhang, M.; Liu, S. Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction. Sensors 2020, 20, 4541. https://doi.org/10.3390/s20164541
Feng X, Feng Q, Li S, Hou X, Zhang M, Liu S. Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction. Sensors. 2020; 20(16):4541. https://doi.org/10.3390/s20164541
Chicago/Turabian StyleFeng, Xin, Qiang Feng, Shaohui Li, Xingwei Hou, Mengqiu Zhang, and Shugui Liu. 2020. "Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction" Sensors 20, no. 16: 4541. https://doi.org/10.3390/s20164541
APA StyleFeng, X., Feng, Q., Li, S., Hou, X., Zhang, M., & Liu, S. (2020). Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction. Sensors, 20(16), 4541. https://doi.org/10.3390/s20164541