High-Accuracy Positioning Based on Pseudo-Ranges: Integrated Difference and Performance Analysis of the Loran System

Abstract
1. Introduction
2. Pseudo-range and Position Solution Method
2.1. Comparion between Predicted Propagation Delay and Measurement
2.1.1. Predicted Propagation Delay
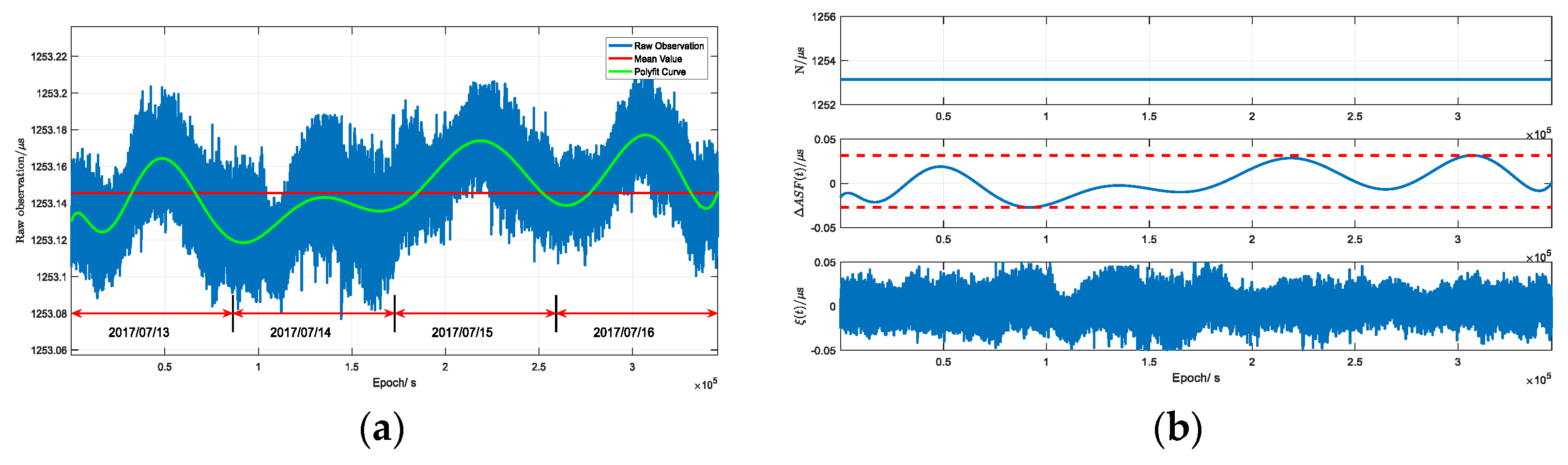
2.1.2. Measured Propagation Delay and Assessment
2.2. Position Solution Method Integrated Difference
- Consistency test of reference station receiver and user receiver, to determine the processing delay deviation between two receivers.
- Identify the accuracy position of a reference station and get the reference station’s pseudo-range, then derive the difference correction based on the accurate location.
- Obtain pseudo-range observations from at least three transmitters.
- Calculate the correction of each pseudo-range, then use the least squares solution to find the location.
3. Results and Discussion
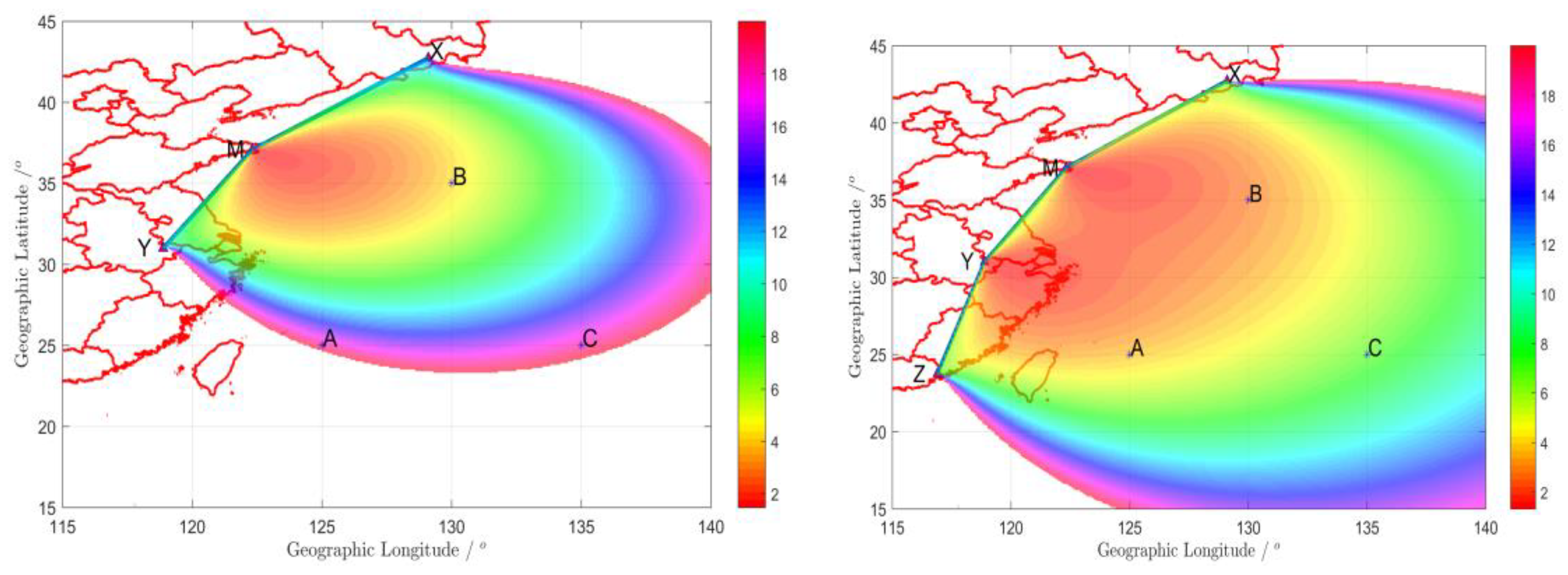
3.1. Geometric Dilution of Precision
3.2. Position Accuracy
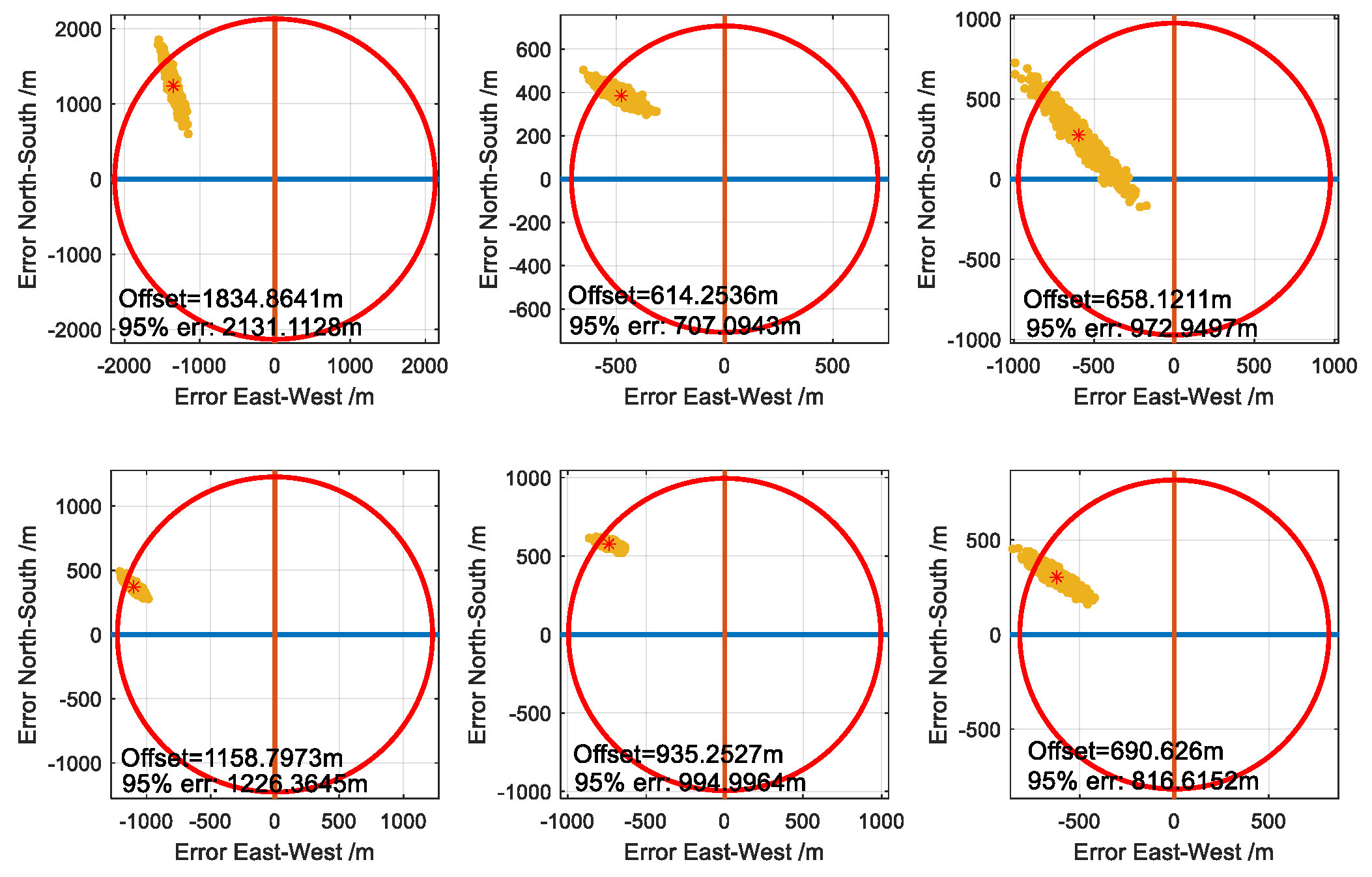
3.2.1. Position without Difference Correction
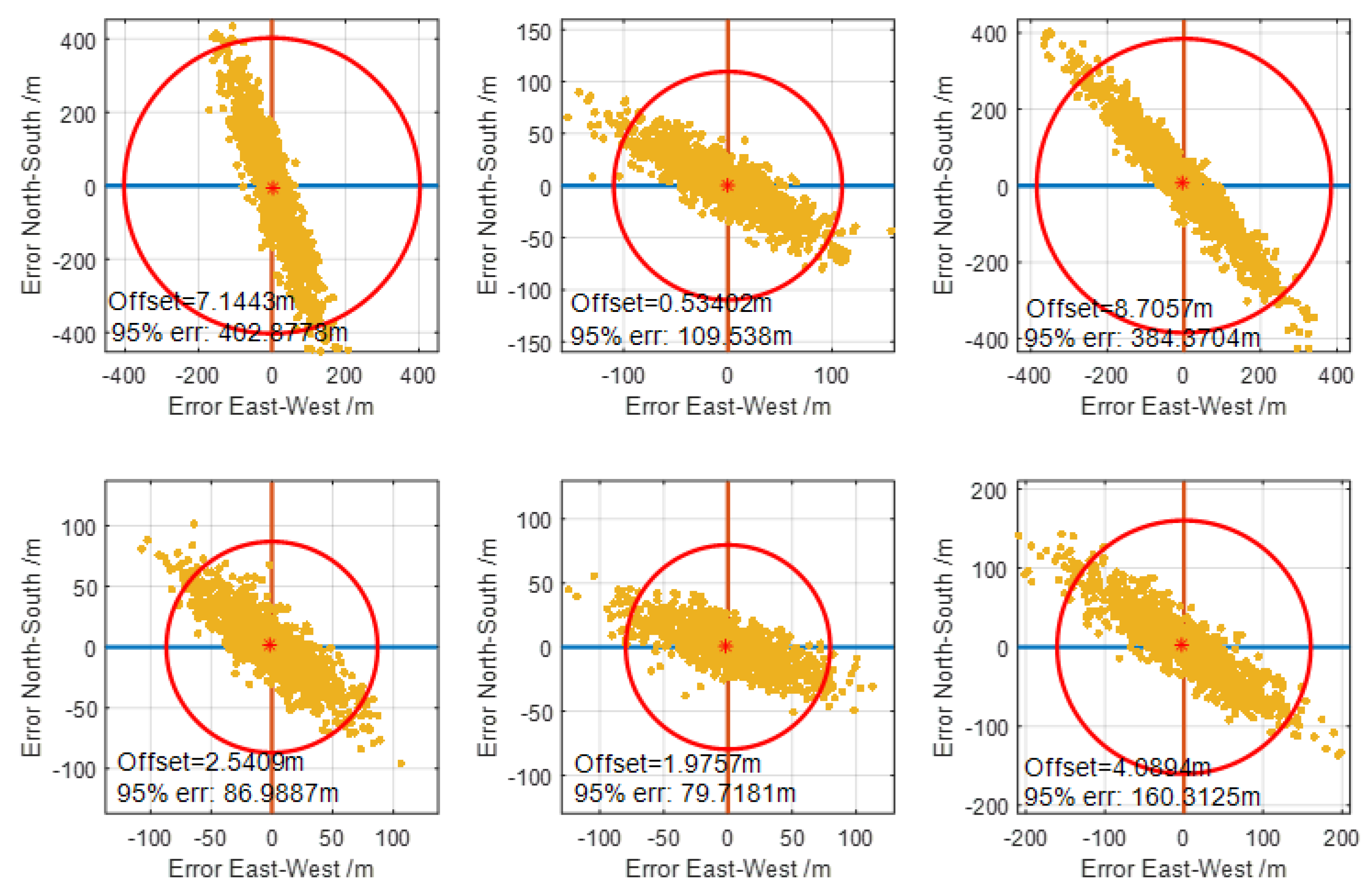
3.2.2. Position with Difference
3.2.3. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Position Solution Algorithm
References
- Grant, A.; Williams, P.; Ward, N.; Basker, S. GPS Jamming and the Impact on Maritime Navigation. J. Navig. 2009, 62, 173–187. [Google Scholar] [CrossRef]
- Last, D. GNSS: The Present Imperfect. Inside GNSS 2010, 5, 60–64. [Google Scholar]
- Zhao, X.; Zhan, X.Q.; Liu, X.; Li, S.J. GNSS Vulnerability Analysis and Assessment. J. Aeronaut. Astronaut. Aviat. 2014, 46, 12–20. [Google Scholar]
- Kim, H.; Lee, J.; Oh, S.H.; So, H.; Hwang, D.H. Multi-Radio Integrated Navigation System M&S Software Design for GNSS Backup under Navigation Warfare. Electronics 2019, 8, 188. [Google Scholar] [CrossRef]
- Volpe, J.A. Vulnerability Assessment of the Transportation Infrastructure Relying on the Global Positioning System. National Transportation System Center. August 2001. Available online: https://rntfnd.org/wp-content/uploads/Vople_vulnerability_assess_2001.pdf (accessed on 5 August 2020).
- FAA report to FAA Vice President for Technical Operations Navigation Services Directorate. Loran’s Capability to Mitigate the Impact of a GPS Outage on GPS Position, Navigation, and Time Applications. March 2004. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.126.7557 (accessed on 5 August 2020).
- Offermans, G.; Bartlett, S.; Schue, C. Providing a Resilient Timing and UTC Service Using eLoran in the United States. Navig. J. Inst. Navig. 2017, 64, 339–349. [Google Scholar] [CrossRef]
- Johnson, G.W.; Siszek, P.F.; Hartnett, R.J.; Shalaev, R.; Wiggins, M. An Evaluation of eLoran as a Backup to GPS. In Proceedings of the 2007 IEEE Conference Technologies for Homeland Security, Woburn, MA, USA, 16–17 May 2007; pp. 95–100. [Google Scholar]
- Basker, S. Development of a Radio Navigation Plan for General Lighthouse Authorities of the United Kingdom and Ireland. J. Navig. 2007, 60, 11–16. [Google Scholar] [CrossRef]
- Yu, D.-H. Study of Alternative Navigation systems for GNSS in South Korea. J. Inf. Commun. Converg. Eng. 2010, 8, 524–527. [Google Scholar] [CrossRef]
- Griffioen, J.W.; Oonincx, P.J. Suitability of Low-Frequency Navigation Systems for Artillery Positioning in a GNSS Denied Environment. J. Navig. 2013, 66, 35–48. [Google Scholar] [CrossRef]
- Hu, A.P.; Gong, T. Research Status and Progress on the Enhance Loran-C Navigation Technology. Mod. Navig. 2016, 1, 74–78. [Google Scholar]
- Yan, B.R.; Li, Y.; Guo, W.; Hua, Y. A Method of Long-wave Timing Based on Difference. Acta Astronomica Sin. 2018, 59, 54. [Google Scholar]
- Li, Y.; Hua, Y.; Yan, B.R.; Guo, W. Experimental Study on a Modified Method for Propagation Delay of Long Wave Signal. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1719. [Google Scholar] [CrossRef]
- Williams, P.; Basker, S.; Ward, N. E-Navigation and the Case for eLoran. J. Navig. 2008, 61, 473–475. [Google Scholar] [CrossRef]
- Williams, P.; Last, D. Mapping the ASFs of the Northwest European LORAN C System. J. Navig. 2000, 53, 225–235. [Google Scholar] [CrossRef]
- Siszek, P.; Johnson, G.; Oates, C.; Wiggins, M.; Hartnett, R. Methods for Developing ASF Grids for Harbor Entrance and Approach. In Proceedings of the 35th Annual Technical Symposium, Groton, MA, USA, 24–25 October 2006. [Google Scholar]
- Johnson, G.W.; Siszek, P.F.; Hartnett, R.J.; Dykstra, K.; Shalaev, R. Temporal Variation of Loran ASFs and their Effects on HEA Navigation. In Proceedings of the European Navigation Conference ENC2008, Toulouse, France, 22–28 April 2008. [Google Scholar]
- Hargreaves, C. ASF Measurement and Processing Techniques to Allow Harbour Navigation at High Accuracy with eLoran. Master’s Thesis, The University of Nottingham, Nottingham, UK, 2010. [Google Scholar]
- Yun, S.C.; Sang, W.H.; Sang, R.Y.; Chansik, P.; Sung, H.Y.; Sang, J.L. A Study on the ASF Correction Age and Error for Effective eLoran Data Channel Utilization in Korea. J. Korean GNSS Soc. 2013, 2, 109–114. [Google Scholar]
- Wang, X.Y.; Zhang, S.F.; Sun, X.W. The Additional Secondary Phase Correction System for AIS Signals. Sensors 2017, 17, 736. [Google Scholar] [CrossRef] [PubMed]
- Minimum Performance Standards for Marine eLORAN Receiving Equipment. Radio Technical Commission for Maritime Services. Available online: https://rtcm.myshopify.com/collections/maritime-navigation-equipment-standardsproducts/copy-of-differential-gnss-package-both-of-the-current-standards-10402-3-and-10403-3 (accessed on 11 February 2020).
- Wnong, X.; Jinlin, Z.; Wenkui, L.; Li, G. Prediction and Measurement of Loran-C Additional Secondary Factor (ASF). In Future Wireless Networks and Information Systems 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 225–232. [Google Scholar]
- Sung, H.Y.; Chang, B.L.; Young, K.L.; Jong, K.L.; Young, J.K.; Sang, J.L. Accuracy Improvement Technique for Timing Application of LORAN-C Signal. IEEE Trans. Instrum. Meas. 2011, 60, 2648–2654. [Google Scholar]
- Hwang, S.W.; Choi, Y.S.; Lee, S.J. An analysis on ASF variations and temperature. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Campbell, L.W.; Doherty, R.H.; Johler, J.R. Loran-C System Dynamic Model: Temporal Propagation Variation Study. Electromagnetic Wave Propagation. 1979. Available online: https://xueshu.baidu.com/usercenter/paper/show?paperid=9b630e5dfc60760f6819f512108e9f8a&site=xueshu_se&hitarticle=1 (accessed on 5 August 2020).
- Mungall, A.G.; Costain, C.C.; Ekholm, W.A. Influence of Temperature-Correlated Loran C Signal Propagation Delays on International-Scale Comparisons. Metrologia 1981, 17, 91–96. [Google Scholar] [CrossRef]
- Ning, L.; Gang, M.; Lachapelle, G.; Elizabeth, C. ASF Effect Analysis Using an Integrated GPS/eLORAN Positioning System. In Proceedings of the ION NTM, Monterey, CA, USA, 18–20 January 2006. [Google Scholar]
- Johnson, G.W.; Shalaev, R.; Oates, C.; Siszek, P.F.; Hartnett, R.; Lown, D.; Shmihuk, K.A. Precedure for Creating Optimal ASF Grids for Harbor Entrance & Approach; Institute of Navigation, GNSS 2006: Fort Worth, TX, USA, 2006. [Google Scholar]
- ITU-R P. Ground-Wave Propagation Curves for Frequencies between 10 kHz and 30 mHz. 2007, pp. 368–369. Available online: https://www.itu.int/rec/R-REC-P.368/en (accessed on 5 August 2020).
- Safar, J.; Vejrazka, F.; Williams, P. Assessing the Limits of Eloran Positioning Accuracy. Int. J. Mar. Navig. Saf. Sea Transp. 2011, 5, 93–101. [Google Scholar]
- Kaplan, E.D. Understanding GPS Principles and Application; Artech House: Norwood, MA, USA, 2006; pp. 322–328. [Google Scholar]
- U.S. Coast Guard and the U.S. Coast Guard Auxiliary. Loran-C User Handbook. Available online: https://www.loran.org/otherarchives/-1992%20-LoranC%20User%20Handbook%20-%20USCG.pdf (accessed on 30 January 2020).
- Qiu, D.; Boneh, D.; Lo, S.; Enge, P. Reliable Location-Based Services from Radio Navigation Systems. Sensors 2010, 10, 11369–11385. [Google Scholar] [CrossRef] [PubMed]
- Lambert, W.D. The Distance between Two Widely Separated Points on the Surface of the Earth. J. Ish. Acad. Sci. 1942, 32, 125–130. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flag | Location | Latitude (N) | Longitude (E) |
|---|---|---|---|
| M | RongCheng | 37.0644 | 122.3228 |
| X | HeLong | 42.7199 | 129.1075 |
| Y | XuanCheng | 31.0689 | 118.8860 |
| Z | Raoping | 23.7239 | 116.8958 |
| Test Site | Latitude(N) | Longitude(E) | GDOP | |
|---|---|---|---|---|
| Three Sites | Four Sites | |||
| A | 25.000 | 125.000 | 18.476 | 3.721 |
| B | 35.000 | 130.000 | 4.295 | 2.774 |
| C | 25.000 | 135.000 | 18.292 | 6.946 |
| Test Site | Transmitters | Pseudo-Range | |||
|---|---|---|---|---|---|
| A | M | 1,361,597.312 | 4,543.230 | 2.719 | 1,362,412.499 |
| X | 2,001,273.422 | 6,677.632 | 4.178 | 2,002,526.074 | |
| Y | 901,698.633 | 3,008.690 | 1.673 | 902,200.037 | |
| Z | 834,208.694 | 2,783.497 | 1.521 | 834,664.528 | |
| B | M | 728,502.840 | 2,430.789 | 1.285 | 728,887.962 |
| X | 860,486.081 | 2,871.177 | 1.580 | 860,959.626 | |
| Y | 1,125,186.922 | 3,754.402 | 2.180 | 1,125,840.485 | |
| Z | 1,780,238.864 | 5,940.108 | 3.674 | 1,781,340.376 | |
| C | M | 1,800,246.82 | 6,142.864 | 3.720 | 1,801,362.021 |
| X | 2,038,381.588 | 6,801.451 | 4.263 | 2,039,659.613 | |
| Y | 1,718,993.171 | 5,735.750 | 3.535 | 1,720,052.800 | |
| Z | 1,841,004.383 | 6,142.864 | 3.813 | 1,842,147.447 |
| SF + ASF | Number | Test Site | Lat Error Average/m | Lat Error STD/m | Log Error Average/m | Log Error STD/m |
|---|---|---|---|---|---|---|
| Yes | Three | A | 1240.696 | 191.300 | −1353.648 | 65.061 |
| B | 381.39 | 29.958 | −474.168 | 49.089 | ||
| C | 270.754 | 154.478 | −595.915 | 134.361 | ||
| Four | A | 371.544 | 30.192 | −1097.384 | 35.255 | |
| B | 576.355 | 15.359 | −737.312 | 34.628 | ||
| C | 304.614 | 48.458 | −622.784 | 68.172 | ||
| Yes 1 | Three | A | 873.035 | 191.346 | −948.423 | 65.974 |
| B | 267.893 | 30.632 | −331.792 | 49.735 | ||
| C | 190.103 | 159.826 | −418.229 | 140.051 | ||
| Four | A | 260.044 | 30.605 | −768.590 | 34.547 | |
| B | 403.782 | 16.262 | −514.944 | 36.179 | ||
| C | 212.640 | 46.631 | −434.992 | 64.4859 | ||
| Yes 2 | Three | A | 370.236 | 185.145 | −407.631 | 63.306 |
| B | 115.498 | 30.396 | −144.487 | 49.337 | ||
| C | 81.238 | 162.273 | −176.940 | 142.134 | ||
| Four | A | 111.064 | 29.137 | −328.444 | 33.520 | |
| B | 173.122 | 16.335 | −222.153 | 36.548 | ||
| C | 88.517 | 47.753 | −184.277 | 67.344 | ||
| No | Three | A | 0.920 | 197.696 | −2.288 | 67.840 |
| B | −0.538 | 29.899 | 1.440 | 50.042 | ||
| C | −10.626 | 150.576 | 10.775 | 133.709 | ||
| Four | A | −0.626 | 31.427 | 0.607 | 37.680 | |
| B | 1.262 | 16.771 | −1.199 | 37.655 | ||
| C | −0.311 | 46.741 | 0.474 | 64.937 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, B.; Li, Y.; Guo, W.; Hua, Y. High-Accuracy Positioning Based on Pseudo-Ranges: Integrated Difference and Performance Analysis of the Loran System. Sensors 2020, 20, 4436. https://doi.org/10.3390/s20164436
Yan B, Li Y, Guo W, Hua Y. High-Accuracy Positioning Based on Pseudo-Ranges: Integrated Difference and Performance Analysis of the Loran System. Sensors. 2020; 20(16):4436. https://doi.org/10.3390/s20164436
Chicago/Turabian StyleYan, Baorong, Yun Li, Wei Guo, and Yu Hua. 2020. "High-Accuracy Positioning Based on Pseudo-Ranges: Integrated Difference and Performance Analysis of the Loran System" Sensors 20, no. 16: 4436. https://doi.org/10.3390/s20164436
APA StyleYan, B., Li, Y., Guo, W., & Hua, Y. (2020). High-Accuracy Positioning Based on Pseudo-Ranges: Integrated Difference and Performance Analysis of the Loran System. Sensors, 20(16), 4436. https://doi.org/10.3390/s20164436