Adaptive Residual Weighted K-Nearest Neighbor Fingerprint Positioning Algorithm Based on Visible Light Communication



Abstract
1. Introduction
- A novel adaptive residual weighted K-nearest neighbor (ARWKNN) fingerprint positioning algorithm is proposed, and K is a dynamic value according to the matched RSSI residual. As far as the authors know, most fingerprint positioning algorithms based on VLC only consider a fixed neighbor value, e.g., [12,25,28].
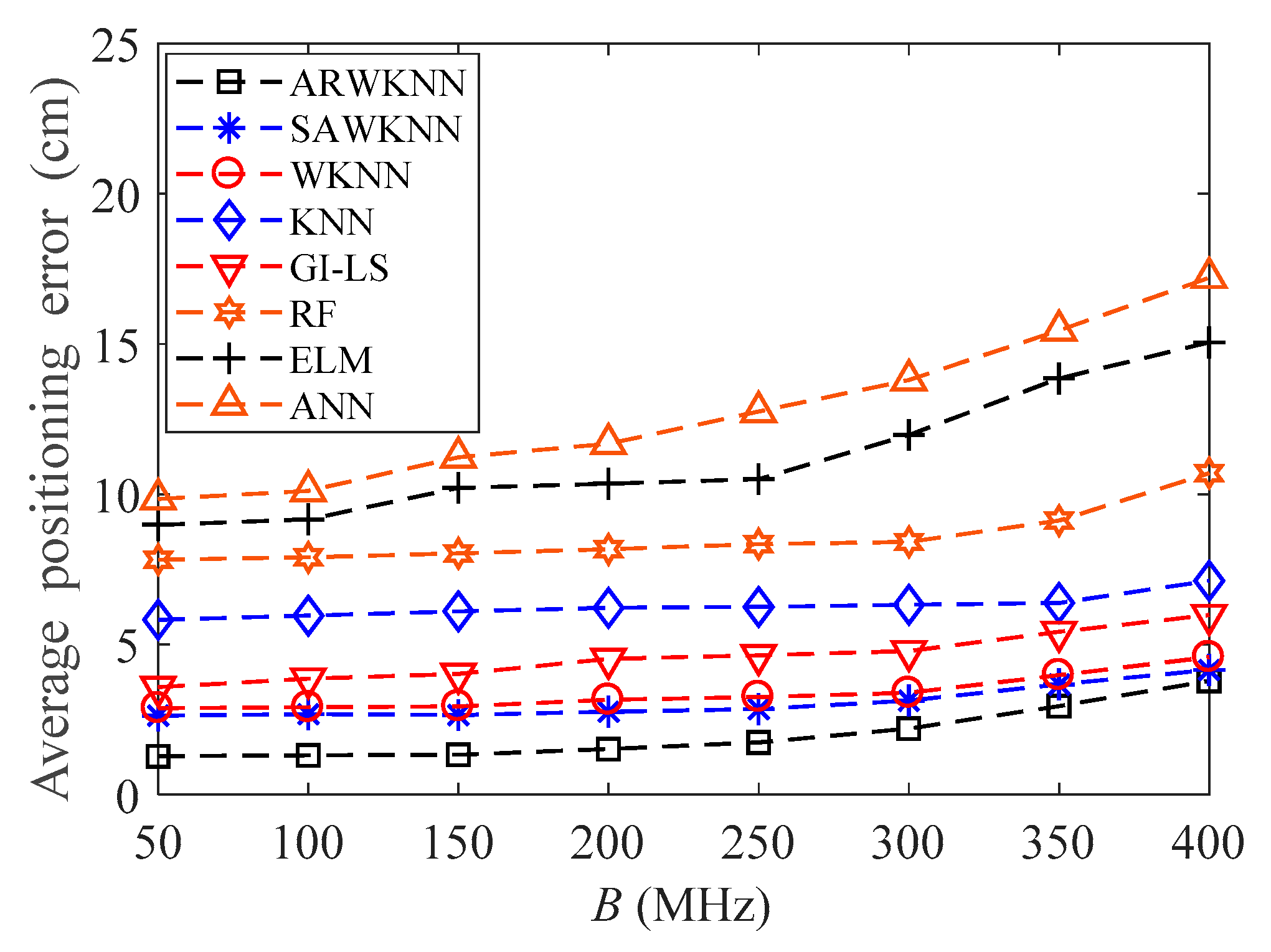
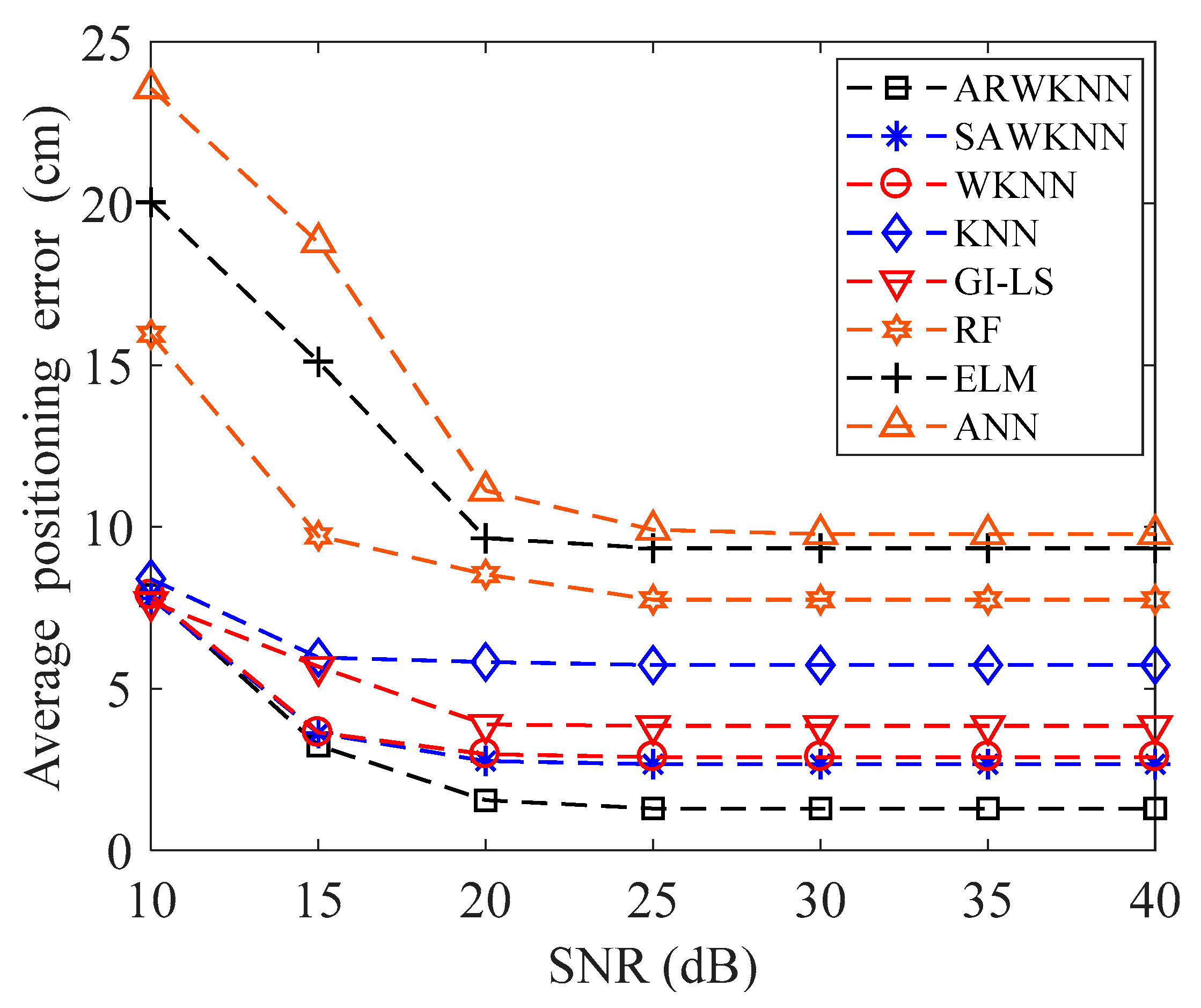
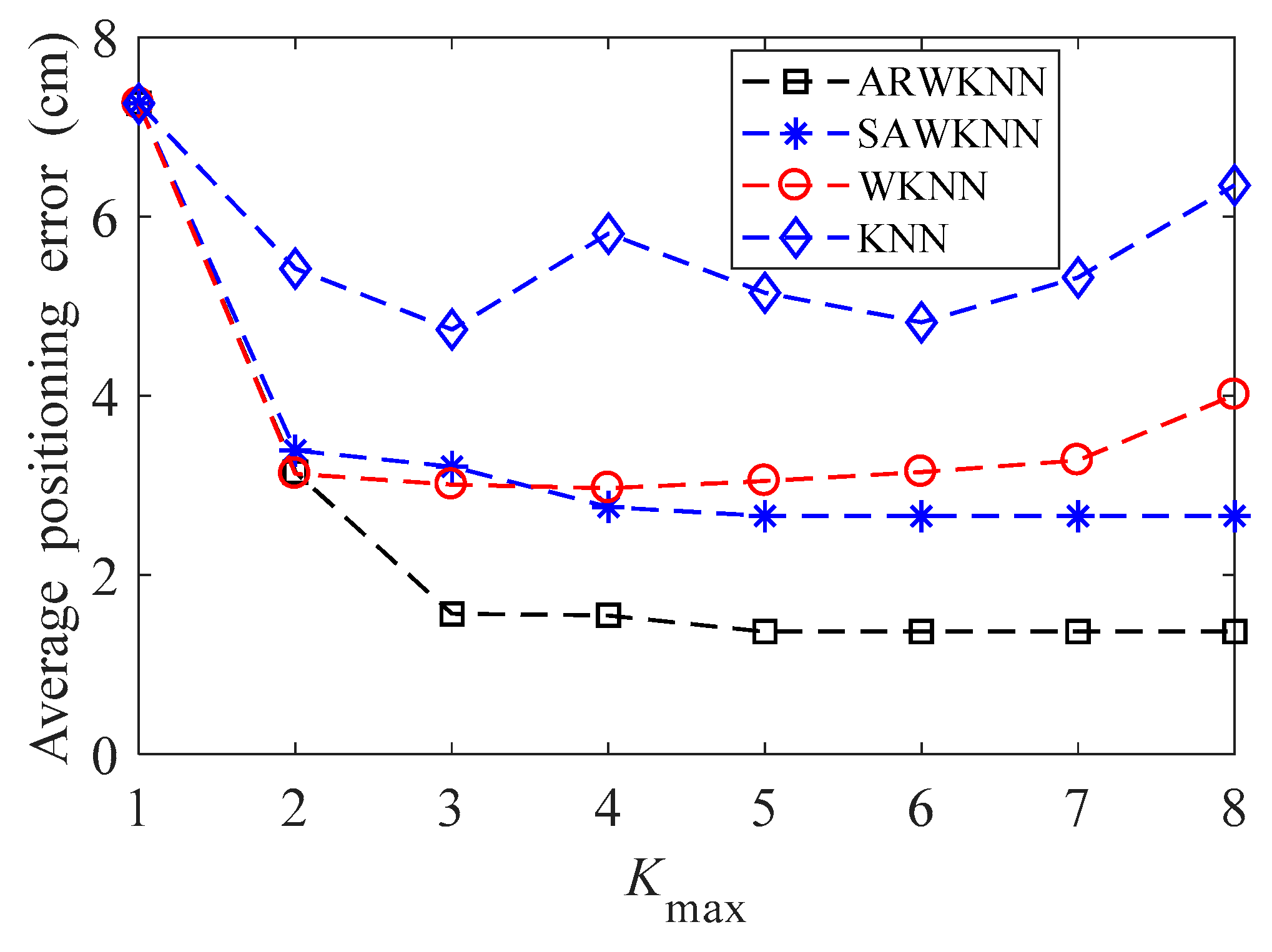
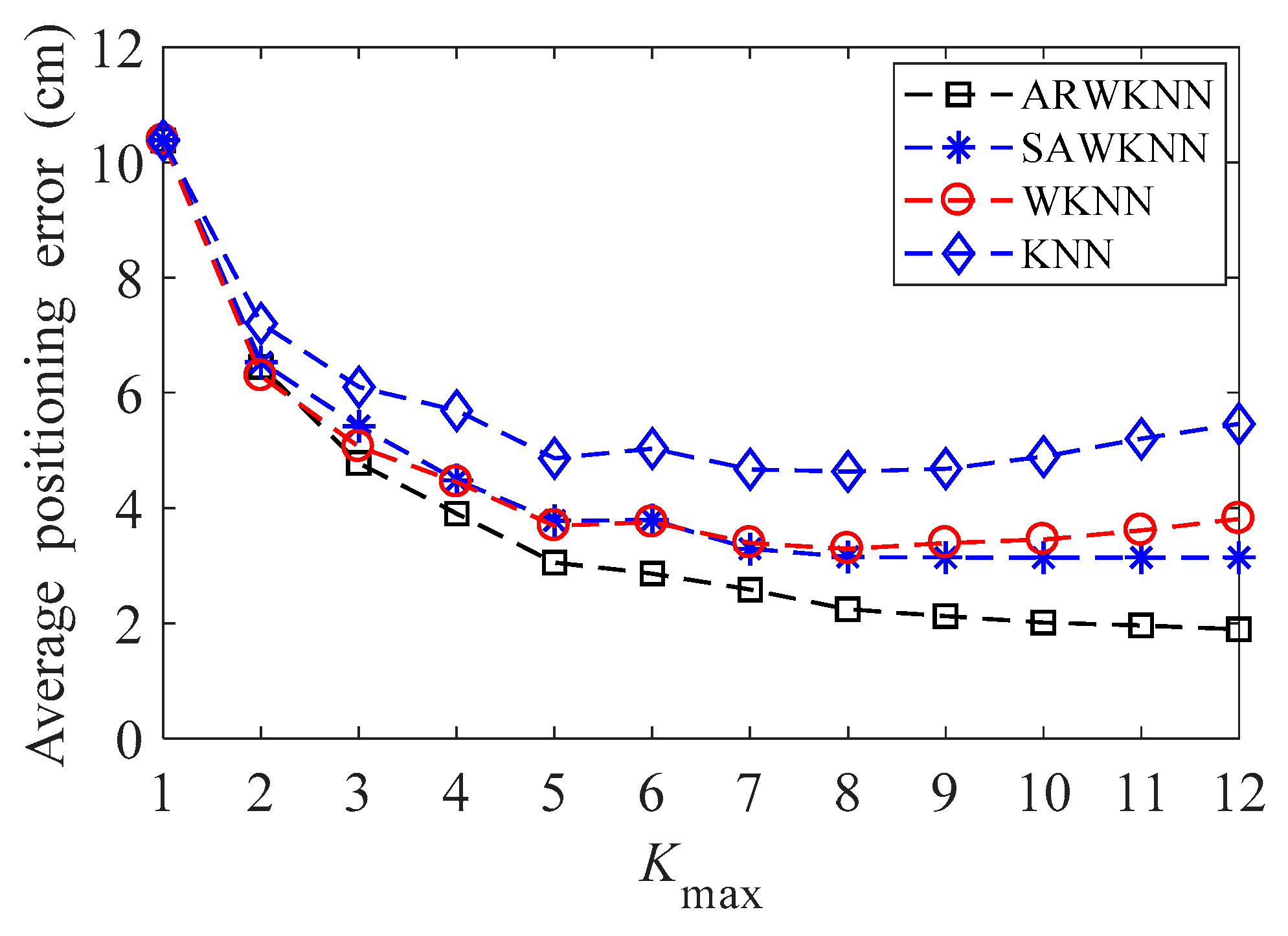
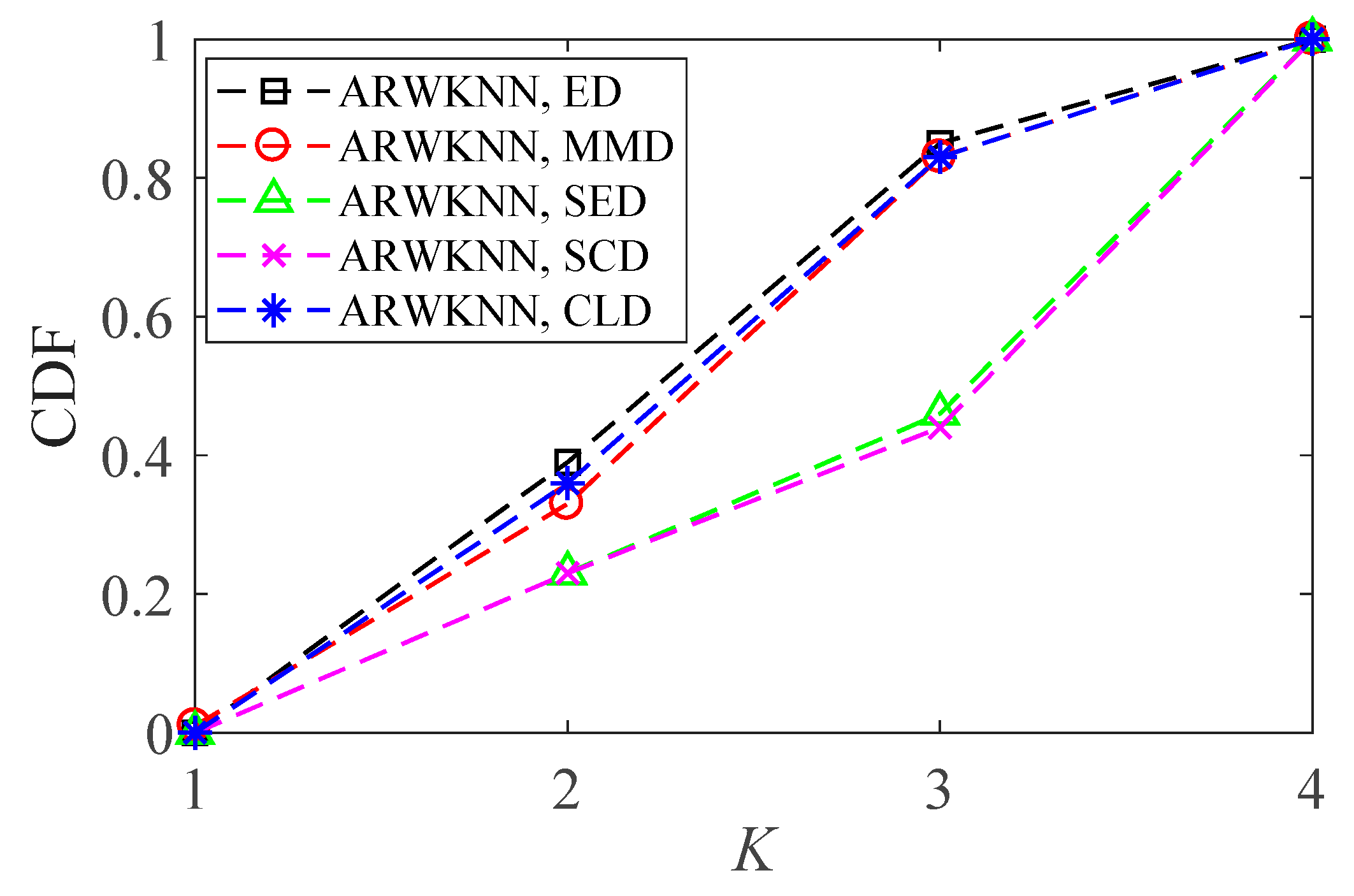
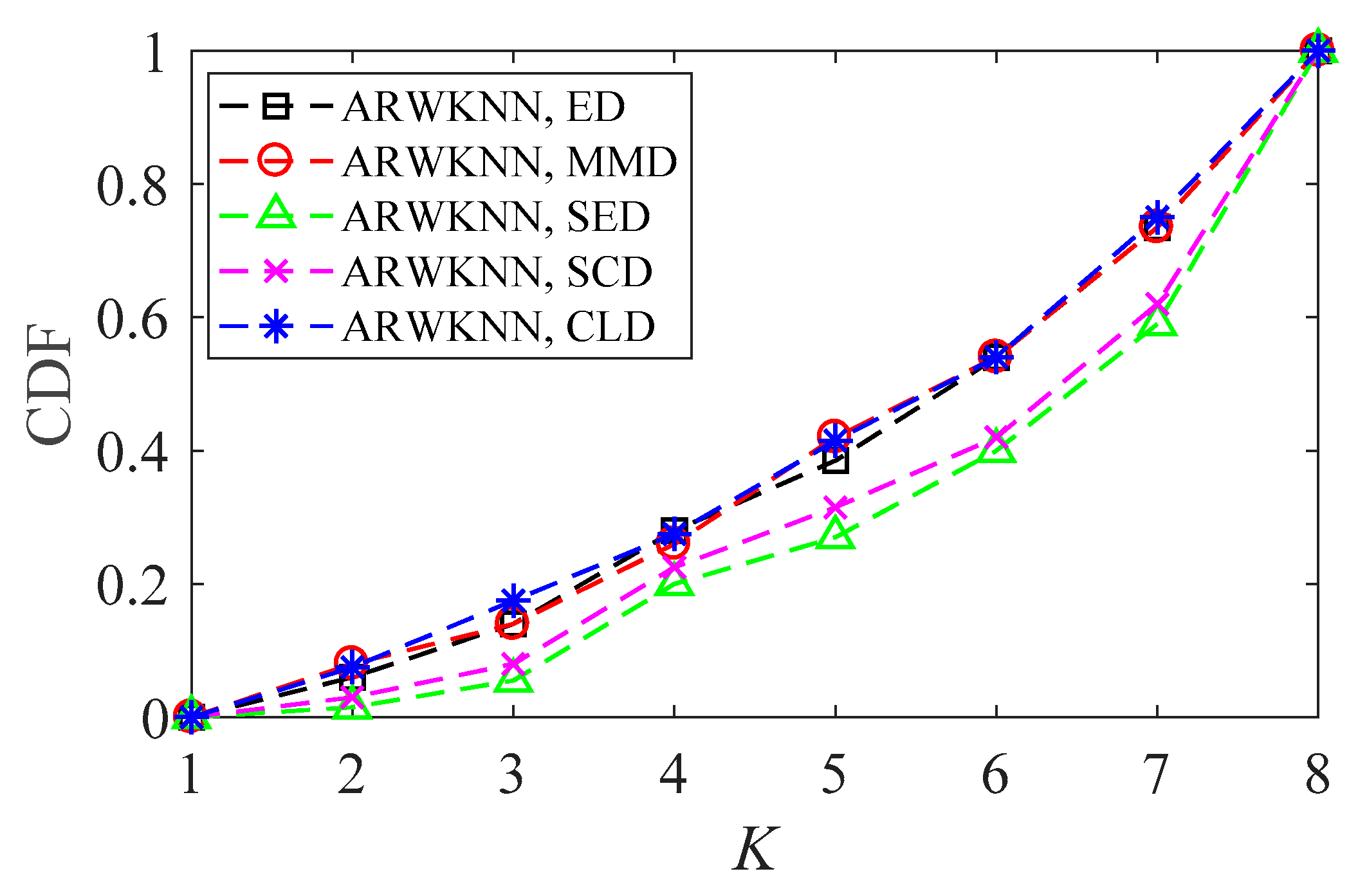
- The impact of modulation bandwidth, transmit power, the signal-to-noise ratio, the maximum number of neighboring fingerprints, the sampling interval, the number of LEDs, the sampling ratio, and distance metric on positioning errors are analyzed in detail. The distribution of optimal K and the complexity of the algorithm are also analyzed in detail. The results can provide a useful reference for the design of the actual VLP system.
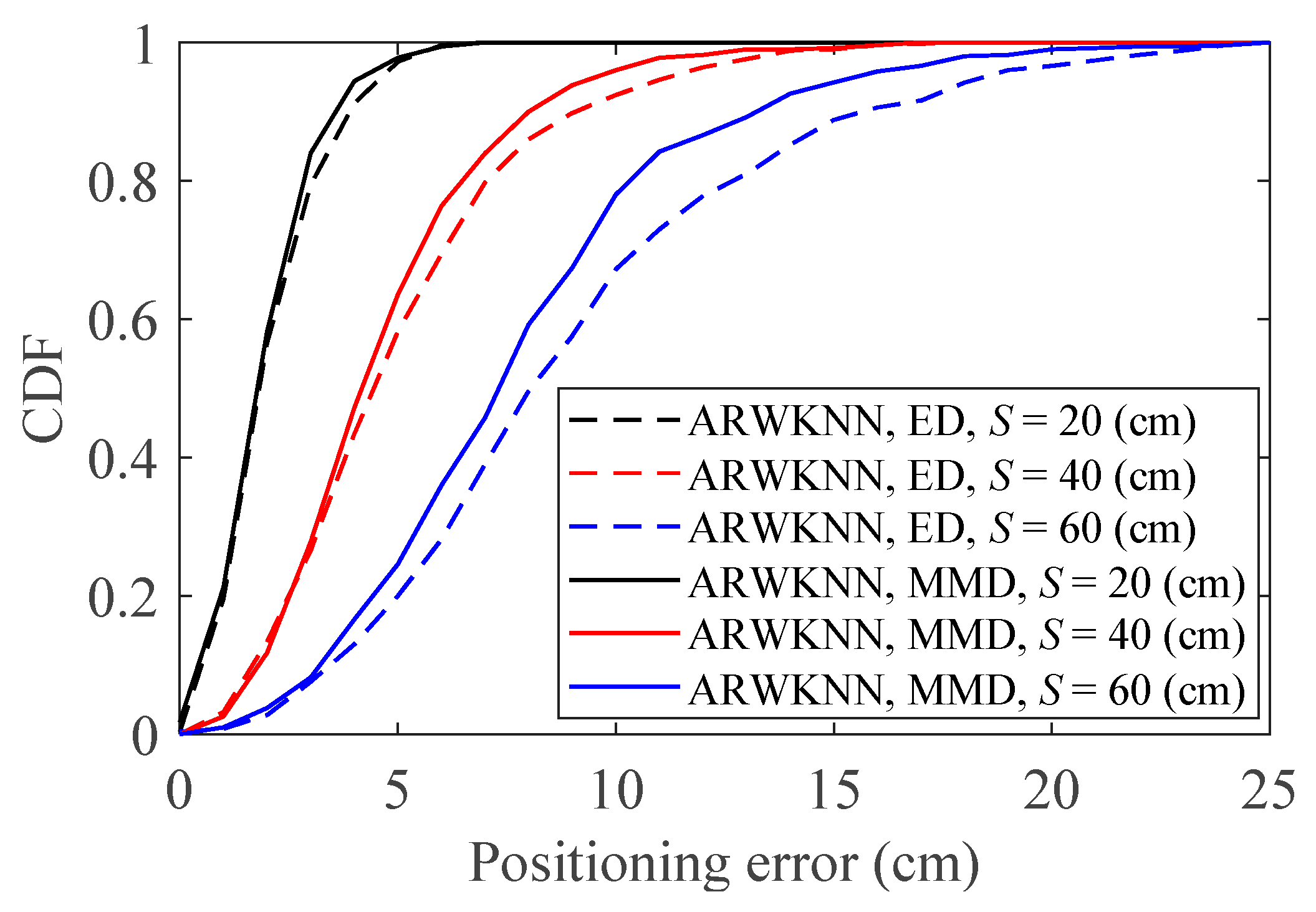
- Simulation results show that the ARWKNN algorithm based on Clark distance (CLD) and minimum maximum distance (MMD) metrics produces the smallest average positioning error in 2-D and 3-D, respectively, as far as the authors know, this is the first work to report the impact of CLD and MMD metrics on the positioning error of the fingerprint positioning algorithm.
- Simulation results show that when the SNR is 20 dB, in 2-D, compared with the fingerprint positioning algorithm based on RF [14], ELM [16], ANN [17], GI-LS [11], SAWKNN [19], WKNN [12] or KNN [15,25] algorithms, the average positioning error of the ARWKNN algorithm based on Manhattan distance can be reduced by 81.82%, 83.93%, 86.06%, 60.15%, 43.84%, 47.81%, and 73.36%, respectively. Compared with SAWKNN, WKNN and KNN algorithms, the ARWKNN algorithm can significantly reduce the average positioning error while maintaining similar algorithm complexity.
2. Design of the Adaptive Residual Weighted K-Nearest Neighbor (ARWKNN) Algorithm
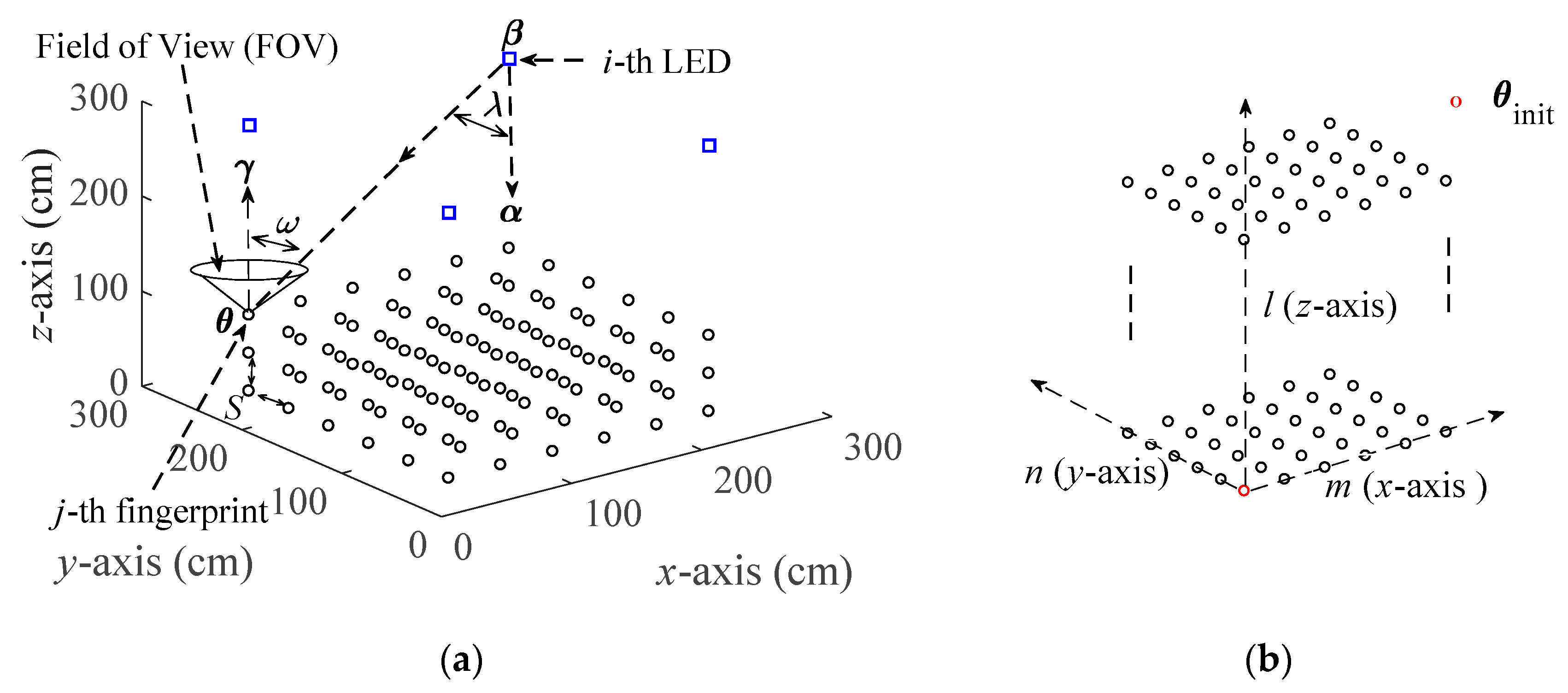
2.1. System Model
2.2. Fingerprint Matrix Construction
2.3. Measurement Vector
2.4. Measurement Model
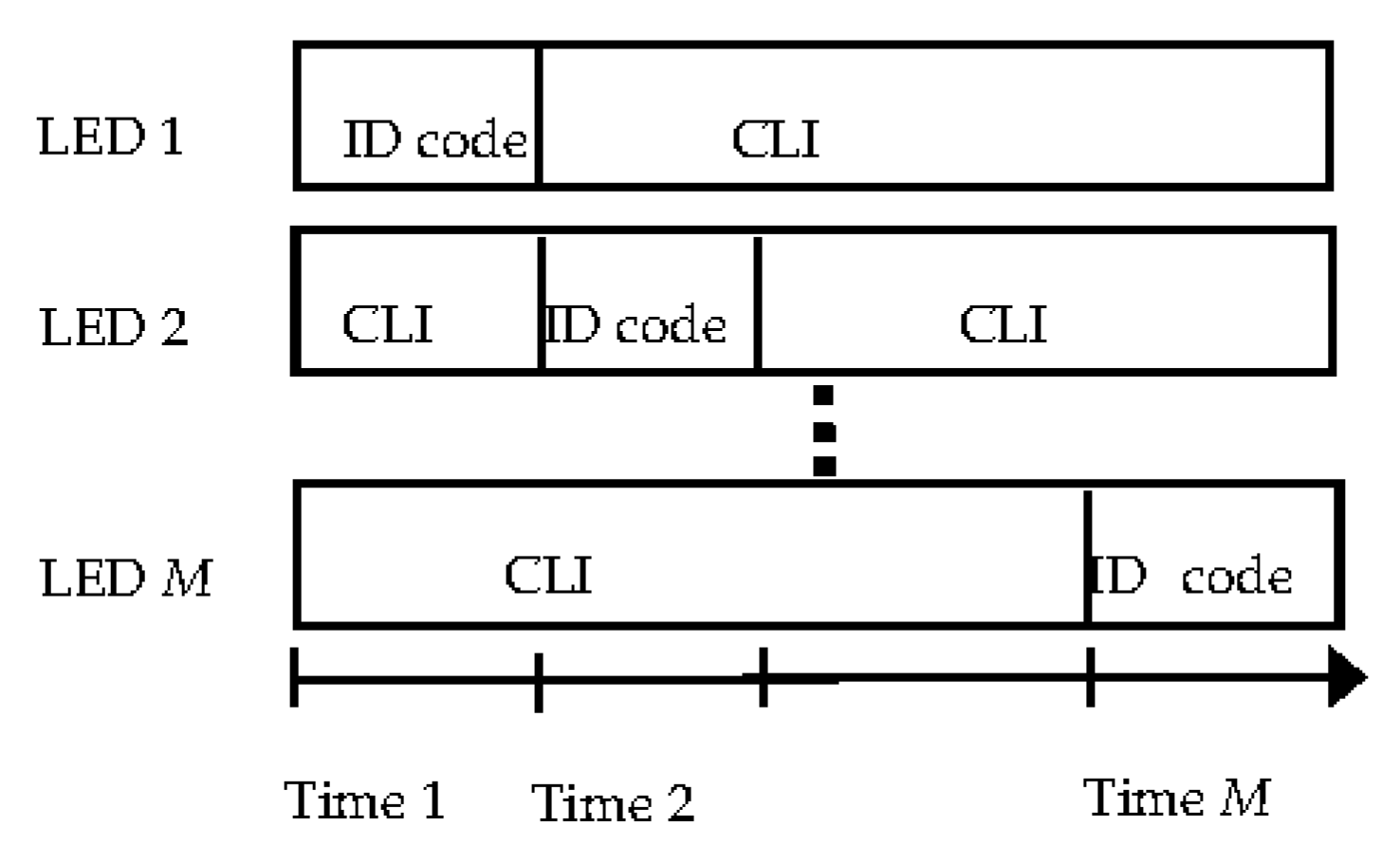
2.5. Channel Access Method
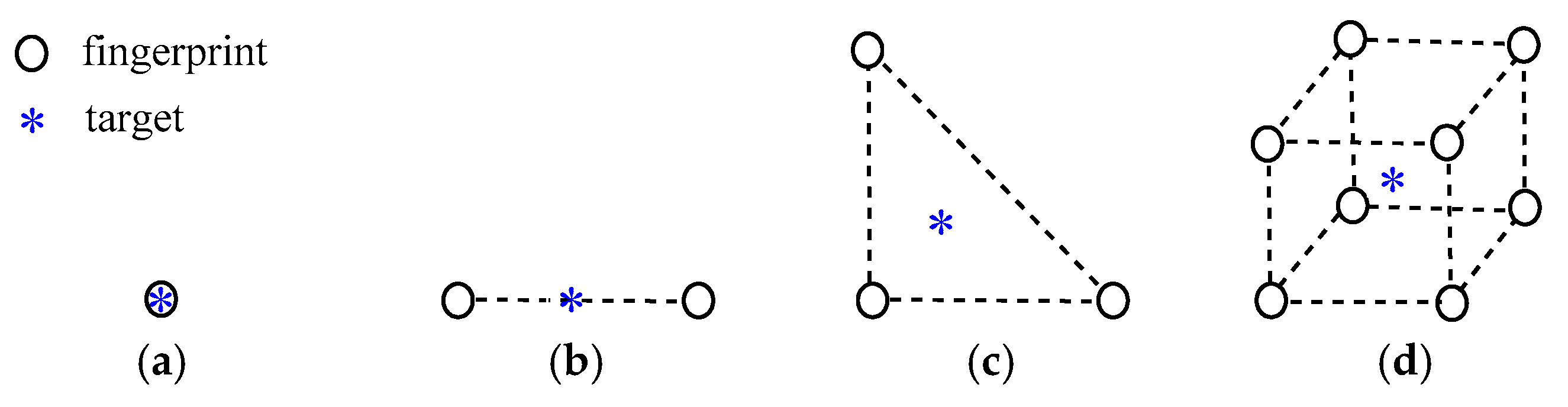
2.6. Setting of K
2.7. ARWKNN Algorithm
| Algorithm 1. ARWKNN algorithm |
| Input: the maximum number of nearest neighbor fingerprints Kmax, fingerprint matrix Φ, and the kth target measurement vector Yk. Output: The coordinates of the kth target, i.e., Ψk. |
| Step 1: Calculate the distance from the kth target to N fingerprint points. Step 2: Sort the distance values in ascending order, i.e.,
[X, I] = sort (dis).
Step 3: Calculate the matched RSSI residuals. K = 1, while do for ii = 1: K ; end for where represents finding the K column values corresponding to the fingerprint matrix Φ according to the index set I. Calculate the kth target RSSI vector via K nearest neighbor fingerprints, , for t = 1, 2, …, K, Calculate the matched RSSI residual between the measured and calculated RSSI values, end while Step 4: Output the K value, i.e., |
3. Simulation Analysis
3.1. Error Definition
3.2. Noise Model of Visible Light Communication (VLC)
3.3. Simulation Parameters
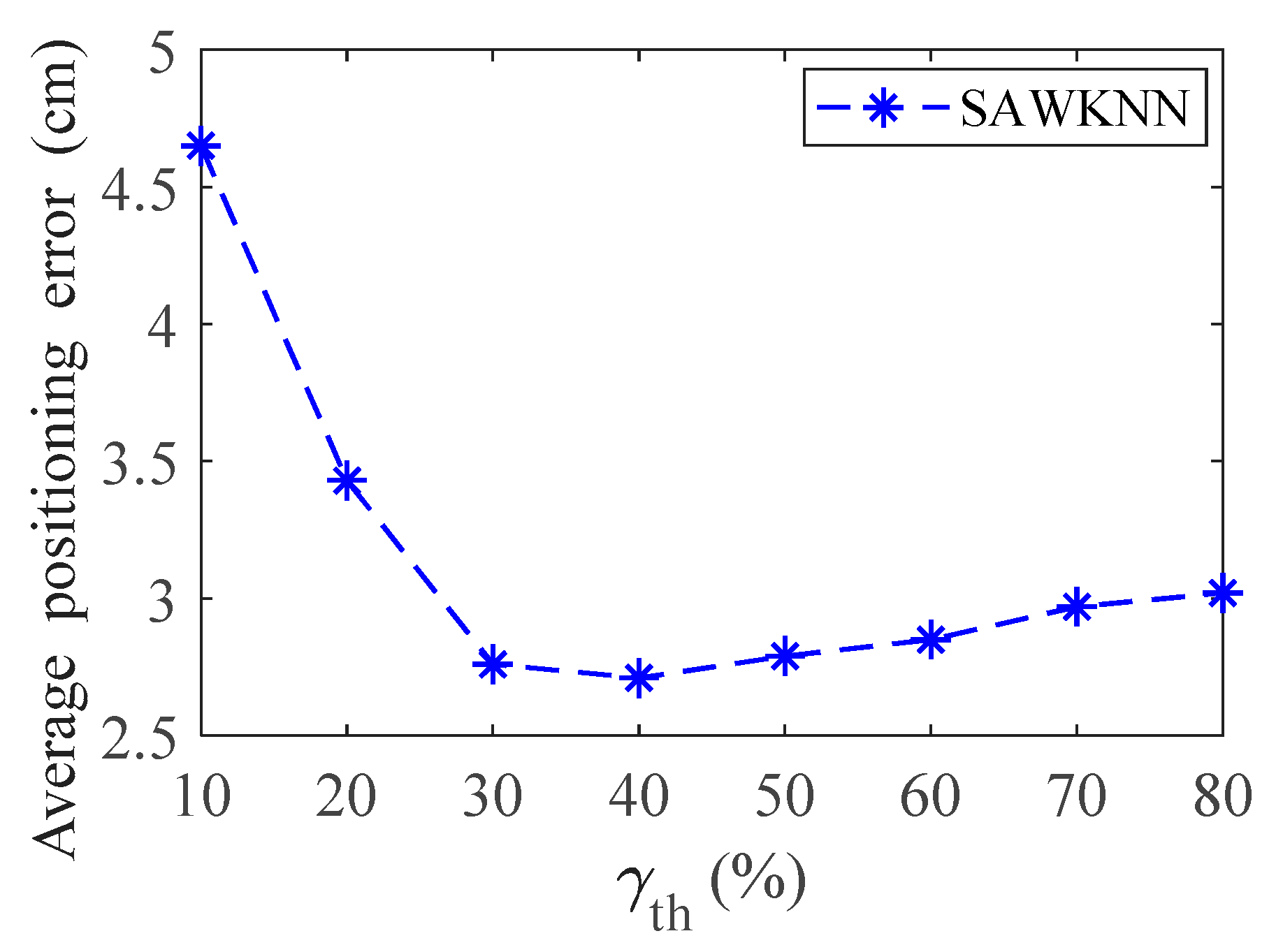
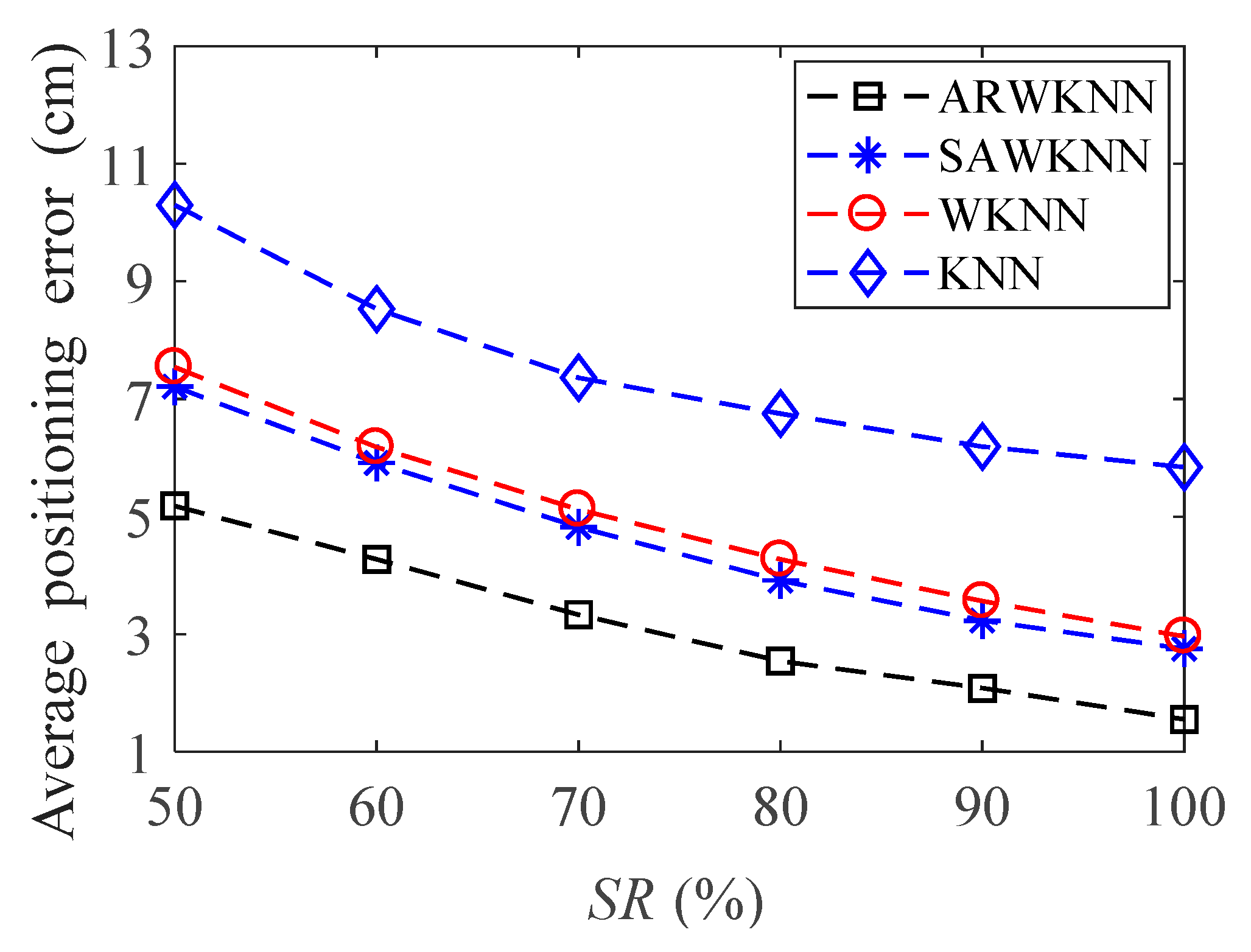
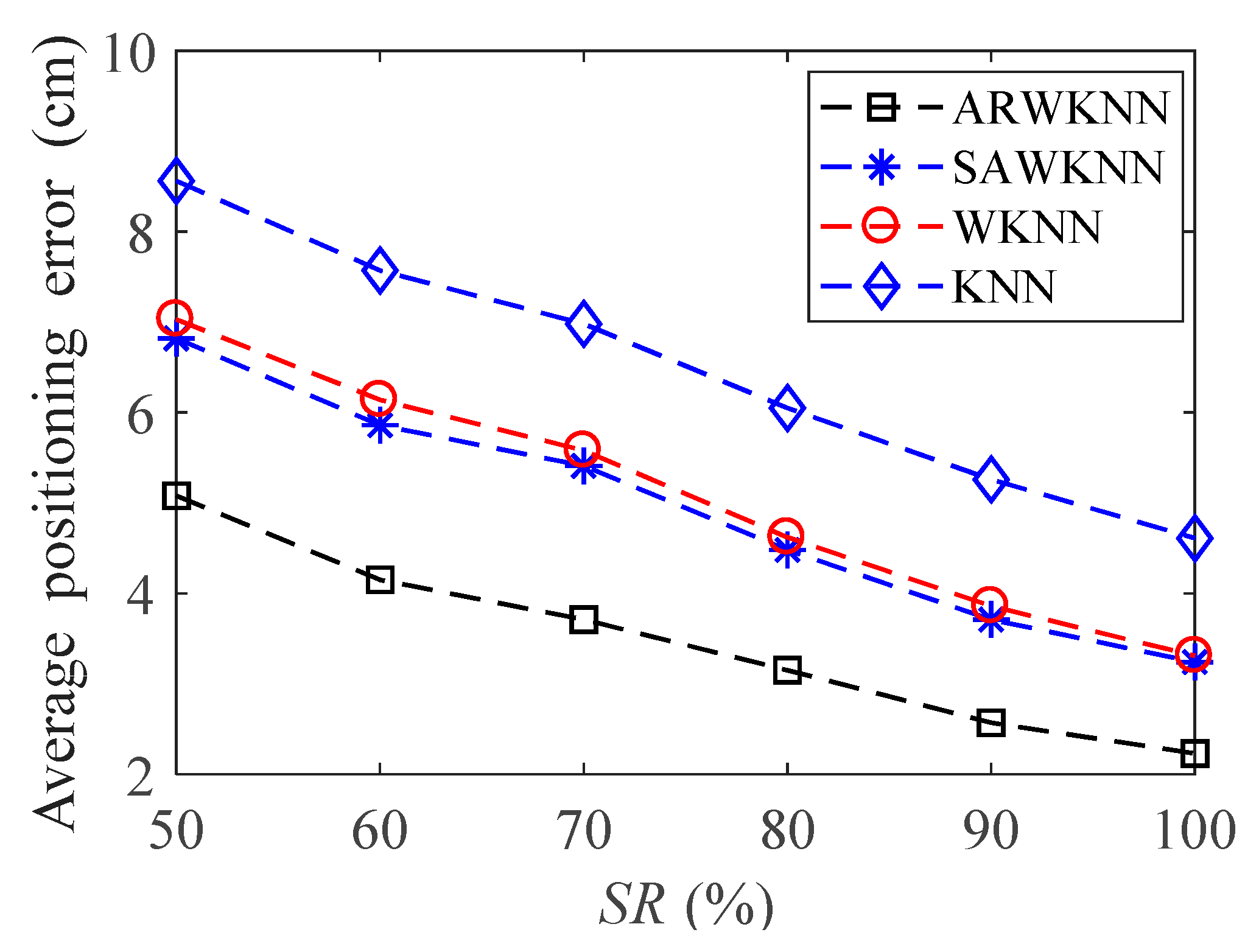
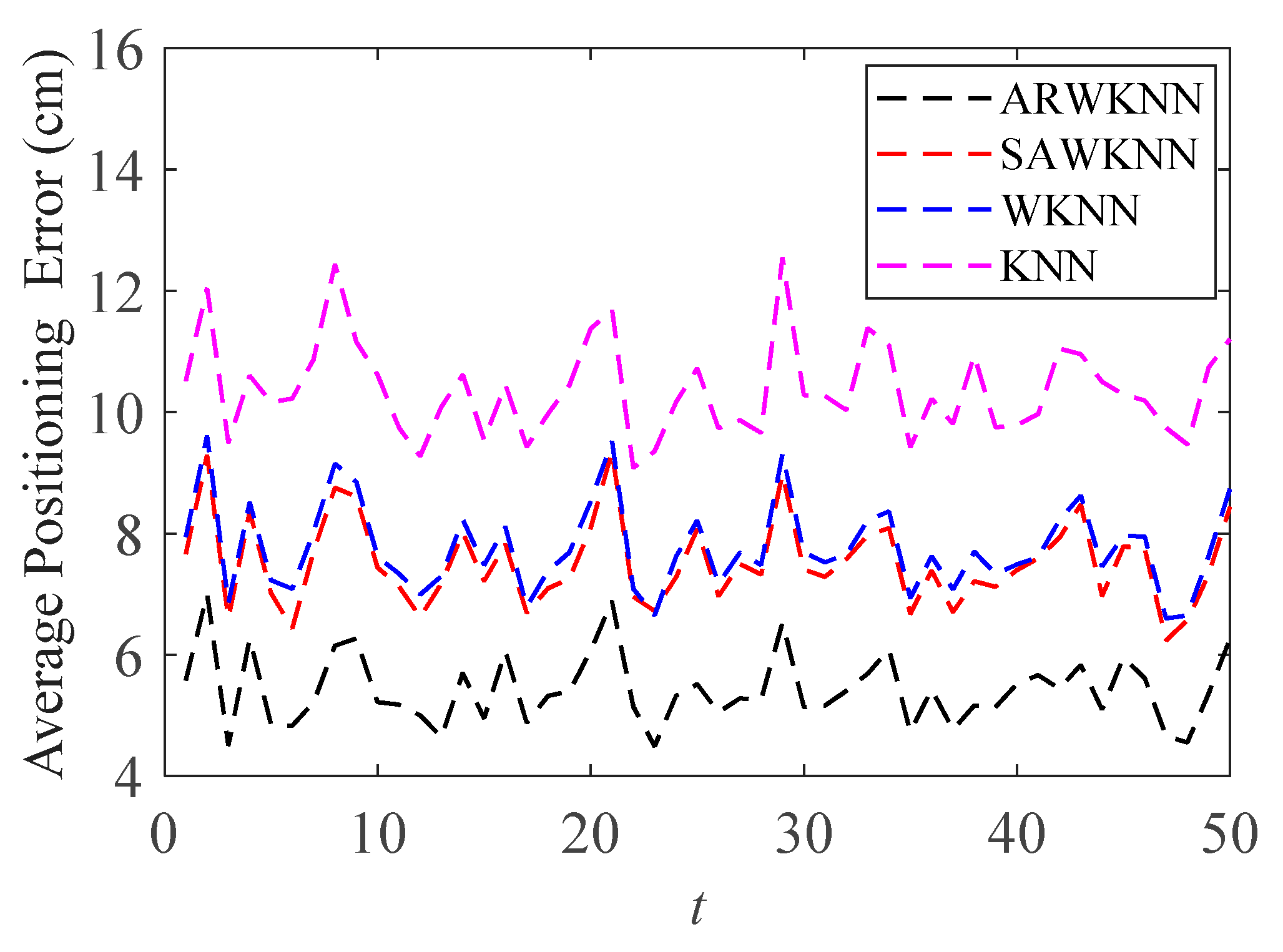
3.4. Result Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jang, B.; Kim, H. Indoor positioning technologies without offline fingerprinting map: A survey. IEEE Commun. Surv. Tutor. 2019, 21, 508–525. [Google Scholar] [CrossRef]
- Yao, C.Y.; Hsia, W.C. An indoor positioning system based on the dual-channel passive RFID technology. IEEE Sens. J. 2018, 18, 4654–4663. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Jawad, A.M.; Jawad, H.M.; Ismail, M. Adaptive neural fuzzy inference system for accurate localization of wireless sensor network in outdoor and indoor cycling applications. IEEE Access 2018, 6, 38475–38489. [Google Scholar] [CrossRef]
- Abdulrahman, A.; Abdulmalik, A.S.; Mansour, A.; Ahmad, A.; Suheer, A.H.; Mai, A.A.A.; Hend, S.A.K. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar]
- Zou, H.; Jin, M.; Jiang, H.; Xie, L.; Spanos, C.J. WinIPS: WiFi-based non-intrusive indoor positioning system with online radio map construction and adaptation. IEEE Trans. Wirel. Commun. 2017, 16, 8118–8130. [Google Scholar] [CrossRef]
- Yadav, R.K.; Bhattarai, B.; Gang, H.S.; Pyun, J.Y. Trusted K nearest bayesian estimation for indoor positioning system. IEEE Access 2019, 7, 51484–51498. [Google Scholar] [CrossRef]
- Trong-Hop, D.; Myungsik, Y. An in-depth survey of visible light communication based positioning systems. Sensors 2016, 16, 678. [Google Scholar]
- Yuan, P.; Zhang, T.; Yang, N.; Xu, H.; Zhang, Q. Energy efficient network localisation using hybrid TOA/AOA measurements. IET Commun. 2019, 13, 963–971. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. Unified near-field and far-field localization for AOA and hybrid AOA-TDOA positionings. IEEE Trans. Wirel. Commun. 2018, 17, 1242–1254. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN fingerprinting indoor positioning methods and deployment challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef]
- Guo, X.; Shao, S.; Ansari, N.; Khreishah, A. Indoor localization using visible light via fusion of multiple classifiers. IEEE Photon. J. 2017, 9, 7803716. [Google Scholar] [CrossRef]
- Alam, F.; Chew, M.T.; Wenge, T.; Gupta, G.S. An accurate visible light positioning system using regenerated fingerprint database based on calibrated propagation model. IEEE Trans. Instrum. Meas. 2019, 68, 2714–2723. [Google Scholar] [CrossRef]
- Lovón-Melgarejo, J.; Castillo-Cara, M.; Huarcaya-Canal, O.; Orozco-Barbosa, L.; García-Varea, I. Comparative study of supervised learning and metaheuristic algorithms for the development of bluetooth-based indoor localization mechanisms. IEEE Access 2019, 7, 26123–26135. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Xue, W.; Yu, K.; Hua, X.; Li, Q.; Qiu, W.; Zhou, B. APs’ virtual positions-based reference point clustering and physical distance-based weighting for indoor Wi-Fi positioning. IEEE Internet Things J. 2018, 5, 3031–3042. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhou, H.; Ding, X.; Zhang, R. Extreme learning machine for regression and multiclass classification. IEEE Trans. Syst. Man Cybern. B. 2012, 42, 513–529. [Google Scholar] [CrossRef]
- Zhang, S.; Du, P.; Chen, C.; Zhong, W.D.; Alphones, A. Robust 3D indoor VLP system based on ANN using hybrid RSS/PDOA. IEEE Access 2019, 7, 47769–47780. [Google Scholar] [CrossRef]
- Fang, X.; Jiang, Z.; Nan, L.; Chen, L. Optimal weighted K-nearest neighbour algorithm for wireless sensor network fingerprint localisation in noisy environment. IET Commun. 2018, 12, 1171–1177. [Google Scholar] [CrossRef]
- Hu, J.; Liu, D.; Yan, Z.; Liu, H. Experimental analysis on weight K-nearest neighbor indoor fingerprint positioning. IEEE Internet Things J. 2019, 6, 891–897. [Google Scholar] [CrossRef]
- Gu, W.; Aminikashani, M.; Deng, P.; Kavehrad, M. Impact of multipath reflections on the performance of indoor visible light positioning systems. IEEE/OSA J. Lightwave Technol. 2016, 34, 2578–2587. [Google Scholar] [CrossRef]
- Şahin, A.; Eroğlu, Y.S.; Güvenç, I.; Pala, N.; Yüksel, M. Hybrid 3D localization for visible light communication systems. IEEE/OSA J. Lightwave Technol. 2015, 33, 4589–4599. [Google Scholar] [CrossRef]
- Mathias, L.C.; Melo, L.F.D.; Abrao, T. 3-D localization with multiple LEDs lamps in OFDM-VLC system. IEEE Access 2018, 7, 6249–6261. [Google Scholar] [CrossRef]
- Zhou, B.; Lau, V.; Chen, Q.; Cao, Y. Simultaneous positioning and orientating for visible light communications: Algorithm design and performance analysis. IEEE Trans. Veh. Technol. 2018, 67, 11790–11804. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, X.; Guan, W.; Chen, B.; Chen, X.; Xie, C. High-speed 3D indoor localization system based on visible light communication using differential evolution algorithm. Opt. Commun. 2018, 424, 177–189. [Google Scholar] [CrossRef]
- Van, M.T.; Tuan, N.V.; Son, T.T.; Le-Minh, H.; Burton, A. Weighted k-nearest neighbour model for indoor VLC positioning. IET Commun. 2017, 11, 864–871. [Google Scholar] [CrossRef]
- Gligorić, K.; Ajmani, M.; Vukobratović, D.; Sinanović, S. Visible light communications-based indoor positioning via compressed sensing. IEEE Commun. Lett. 2018, 22, 1410–1413. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Zhang, R.; Zhong, W.D.; Qian, K.; Zhang, S.; Du, P. A reversed visible light multitarget localization system via sparse matrix reconstruction. IEEE Internet Things J. 2018, 5, 4223–4230. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Keskin, M.F.; Sezer, A.D.; Gezici, S. Localization via visible light systems. Proc. IEEE 2018, 106, 1063–1088. [Google Scholar] [CrossRef]
- Zhou, Z.; Kavehrad, M.; Deng, P. Indoor positioning algorithm using light-emitting diode visible light communications. Opt. Eng. 2012, 51, 085009. [Google Scholar] [CrossRef]
- Yasir, M.; Ho, S.W.; Vellambi, B.N. Indoor positioning system using visible light and accelerometer. IEEE/OSA J. Lightwave Technol. 2014, 32, 3306–3316. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Zhang, W.; Chowdhury, M.I.S.; Kavehrad, M. Asynchronous indoor positioning system based on visible light communications. Opt. Eng. 2014, 53, 045105. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Zhang, X.; Wu, R. Indoor visible light positioning combined with ellipse-based ACO-OFDM. IET Commun. 2018, 12, 2181–2187. [Google Scholar] [CrossRef]
- Mossaad, M.S.A.; Hranilovic, S.; Lampe, L. Visible light communications using OFDM and multiple LEDs. IEEE Trans. Commun. 2015, 63, 4304–4313. [Google Scholar] [CrossRef]
- Cha, S.H. Comprehensive survey on distance/similarity measures between probability density functions. Int. J. Math. Models Methods Appl. Sci. 2007, 1, 300–307. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | Meaning |
|---|---|
| m | The number of columns corresponding to the fingerprint point |
| n | The number of rows corresponding to the fingerprint point |
| l | The number of dimensions corresponding to the fingerprint point |
| Minimum | Maximum | Average | |
|---|---|---|---|
| SNR (B = 640 KHz) | 42.97 dB | 60.92 dB | 52.45 dB |
| SNR (B = 100 MHz) | 19.72 dB | 37.35 dB | 28.86 dB |
| Algorithm | Average Positioning Error |
|---|---|
| ARWKNN | 1.55 cm |
| RF | 8.53 cm |
| ELM | 9.65 cm |
| ANN | 11.12 cm |
| GI-LS | 3.89 cm |
| SAWKNN | 2.76 cm |
| WKNN | 2.97 cm |
| KNN | 5.82 cm |
| Distance Metrics | KNN | WKNN | ARWKNN |
|---|---|---|---|
| ED | 4.84 cm | 2.61 cm | 1.51 cm |
| MD | 5.82 cm | 2.97 cm | 1.55 cm |
| MMD | 5.84 cm | 2.97 cm | 1.54 cm |
| SED | 4.84 cm | 2.16 cm | 1.85 cm |
| CHD | 5.22 cm | 2.97 cm | 1.61 cm |
| SCD | 4.99 cm | 2.03 cm | 1.82 cm |
| WHD | 5.79 cm | 2.94 cm | 1.54 cm |
| LD | 6.17 cm | 3.45 cm | 1.81 cm |
| MTD | 4.99 cm | 2.61 cm | 1.50 cm |
| SCSD | 4.99 cm | 2.03 cm | 1.82 cm |
| CAD | 5.97 cm | 2.93 cm | 1.53 cm |
| CLD | 5.05 cm | 2.62 cm | 1.45 cm |
| Distance Metrics | KNN | WKNN | ARWKNN |
|---|---|---|---|
| ED | 4.46 cm | 3.30 cm | 2.31 cm |
| MD | 4.63 cm | 3.29 cm | 2.28 cm |
| MMD | 4.69 cm | 3.33 cm | 2.18 cm |
| SED | 4.46 cm | 3.05 cm | 2.42 cm |
| CHD | 5.18 cm | 4.12 cm | 2.86 cm |
| SCD | 4.53 cm | 3.13 cm | 2.58 cm |
| WHD | 4.91 cm | 3.53 cm | 2.43 cm |
| LD | 5.30 cm | 4.16 cm | 2.61 cm |
| MTD | 4.53 cm | 3.41 cm | 2.45 cm |
| SCSD | 4.53 cm | 3.13 cm | 2.58 cm |
| CAD | 4.88 cm | 3.51 cm | 2.41 cm |
| CLD | 4.64 cm | 3.58 cm | 2.60 cm |
| Algorithm | The Value of S | Average Computing Time |
|---|---|---|
| KNN | S = 10 cm | 15.07 ms |
| WKNN | S = 10 cm | 15.18 ms |
| SAWKNN | S = 10 cm | 15.51 ms |
| ARWKNN | S = 10 cm | 15.28 ms |
| KNN | S = 20 cm | 8.62 ms |
| WKNN | S = 20 cm | 8.68 ms |
| SAWKNN | S = 20 cm | 8.95 ms |
| ARWKNN | S = 20 cm | 8.91 ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Chen, C.-C.; Wu, Y.; Wang, X.; Wei, F. Adaptive Residual Weighted K-Nearest Neighbor Fingerprint Positioning Algorithm Based on Visible Light Communication. Sensors 2020, 20, 4432. https://doi.org/10.3390/s20164432
Xu S, Chen C-C, Wu Y, Wang X, Wei F. Adaptive Residual Weighted K-Nearest Neighbor Fingerprint Positioning Algorithm Based on Visible Light Communication. Sensors. 2020; 20(16):4432. https://doi.org/10.3390/s20164432
Chicago/Turabian StyleXu, Shiwu, Chih-Cheng Chen, Yi Wu, Xufang Wang, and Fen Wei. 2020. "Adaptive Residual Weighted K-Nearest Neighbor Fingerprint Positioning Algorithm Based on Visible Light Communication" Sensors 20, no. 16: 4432. https://doi.org/10.3390/s20164432
APA StyleXu, S., Chen, C.-C., Wu, Y., Wang, X., & Wei, F. (2020). Adaptive Residual Weighted K-Nearest Neighbor Fingerprint Positioning Algorithm Based on Visible Light Communication. Sensors, 20(16), 4432. https://doi.org/10.3390/s20164432