Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion


Abstract
:1. Introduction
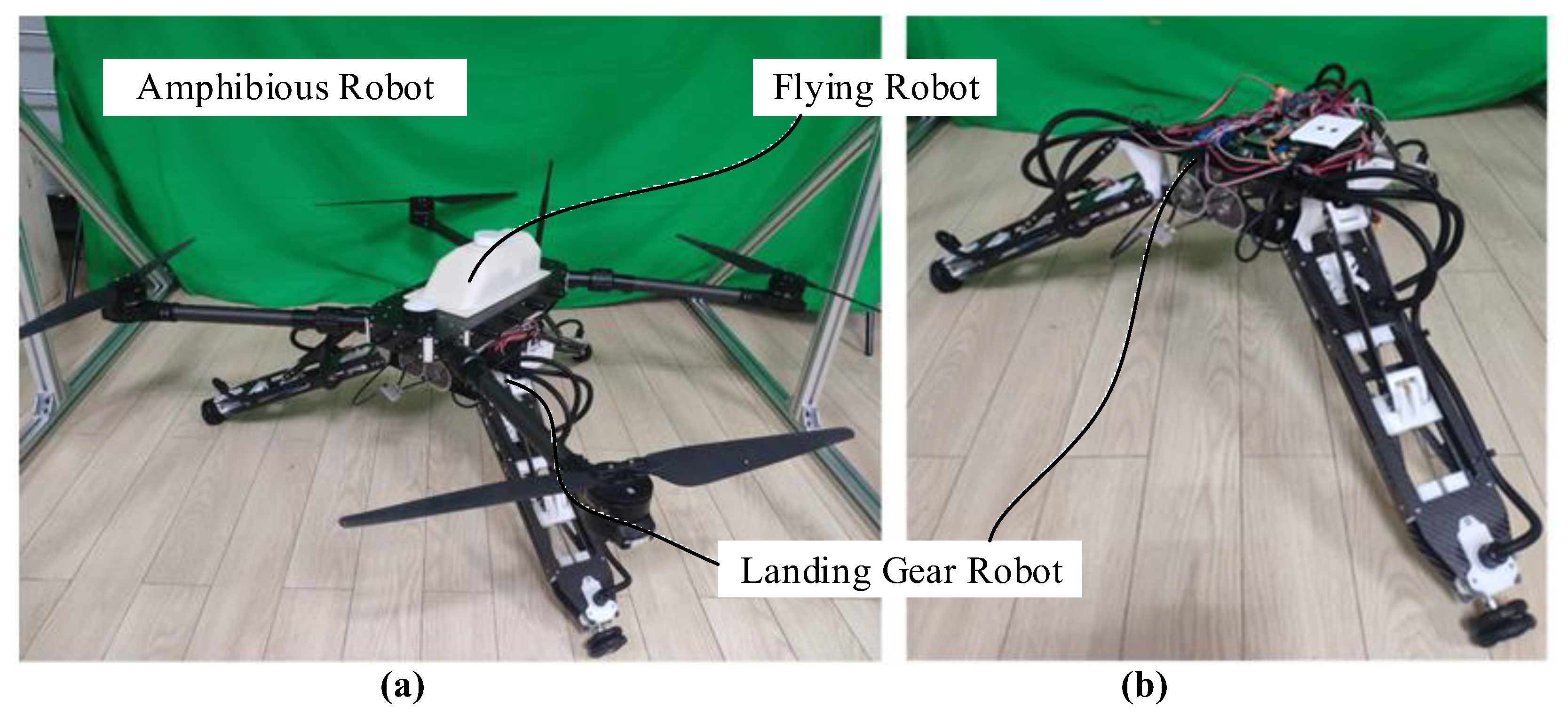
2. Adaptive Landing Gear Robot
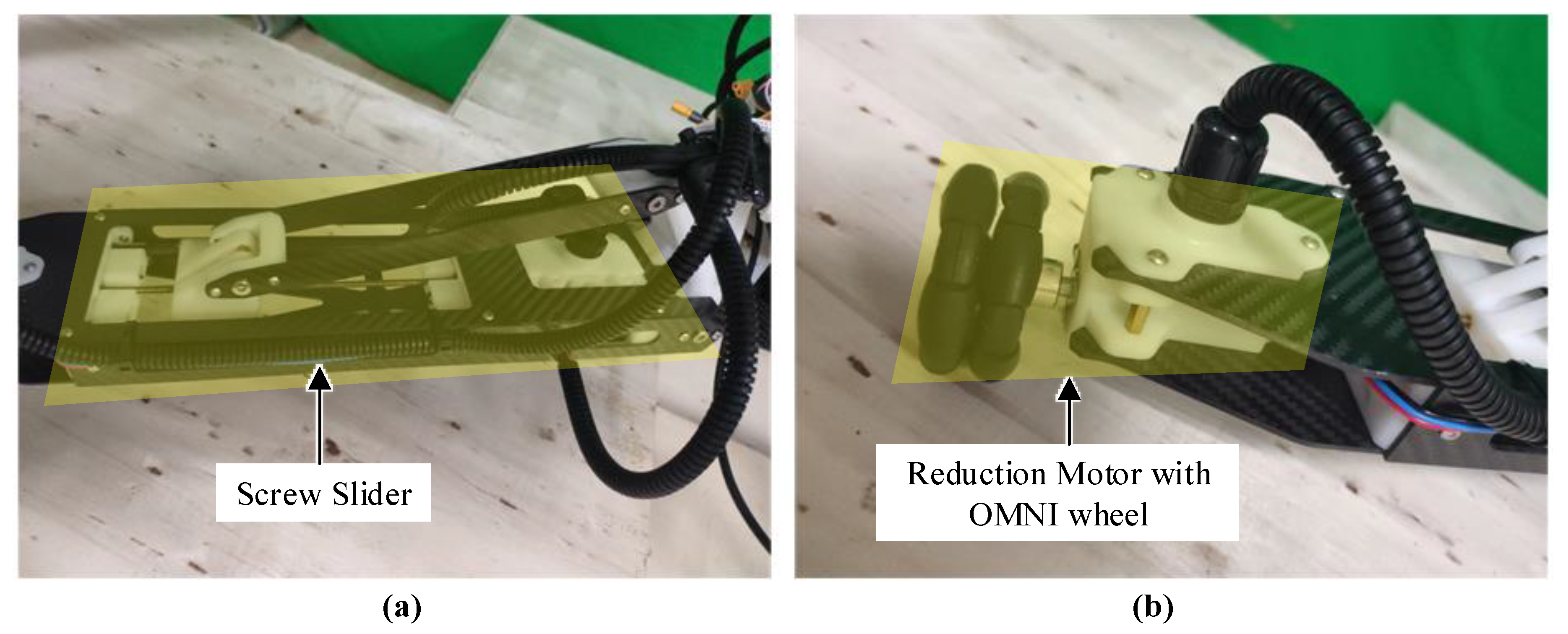
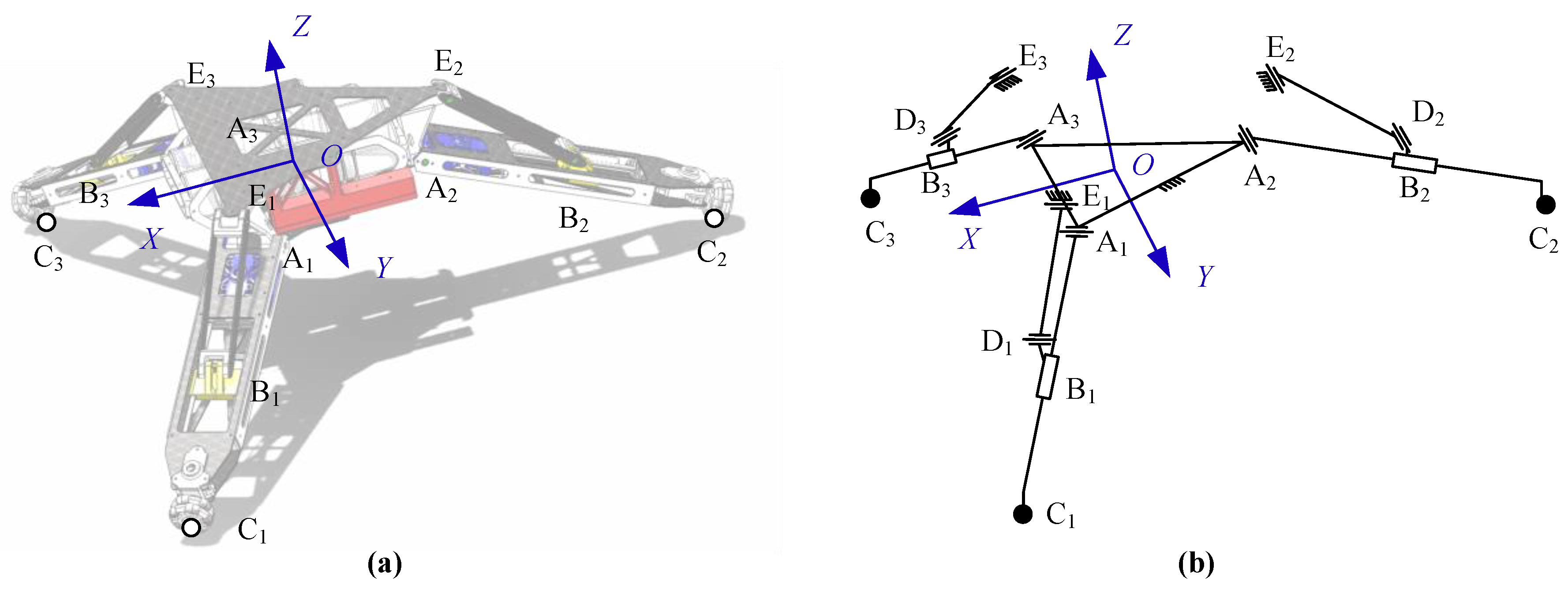
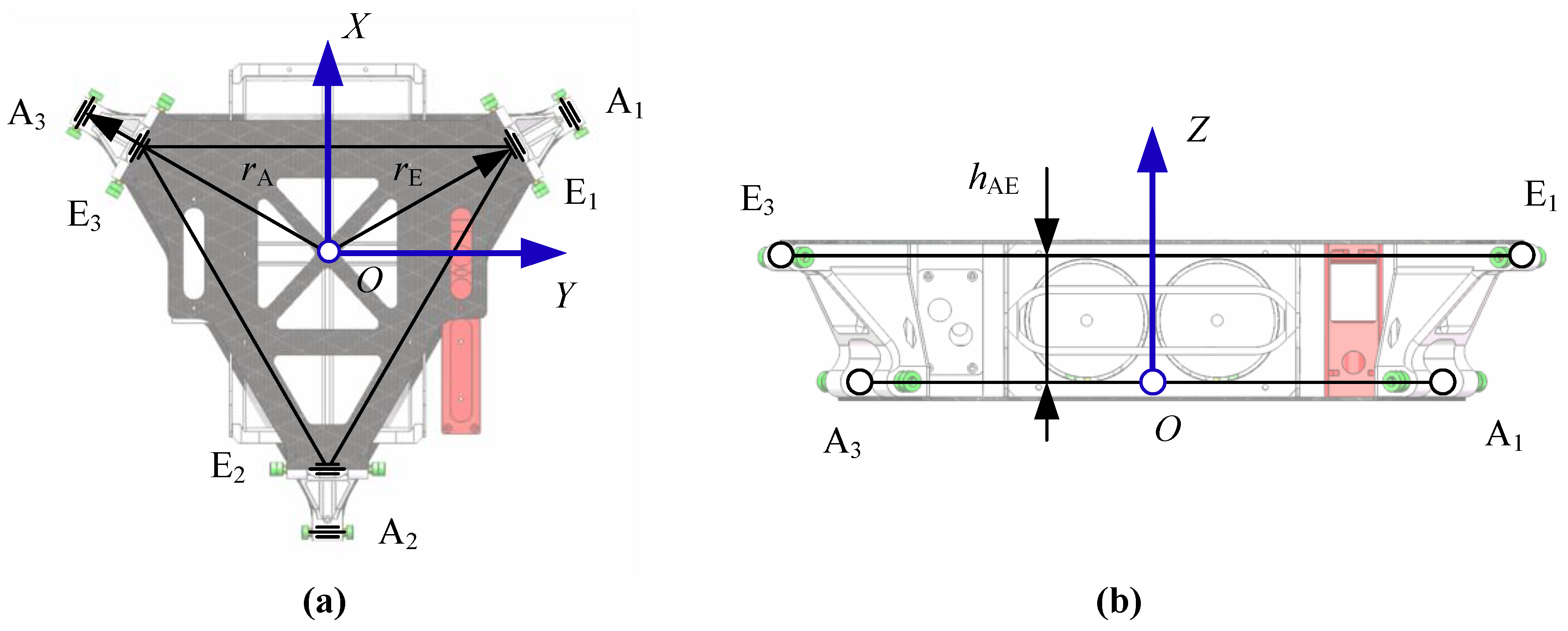
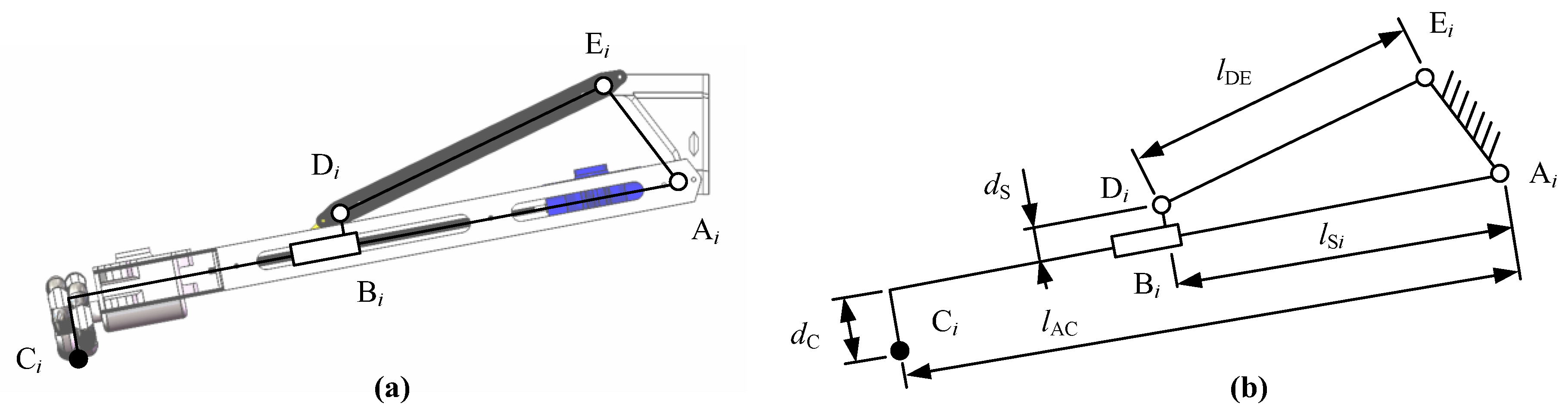
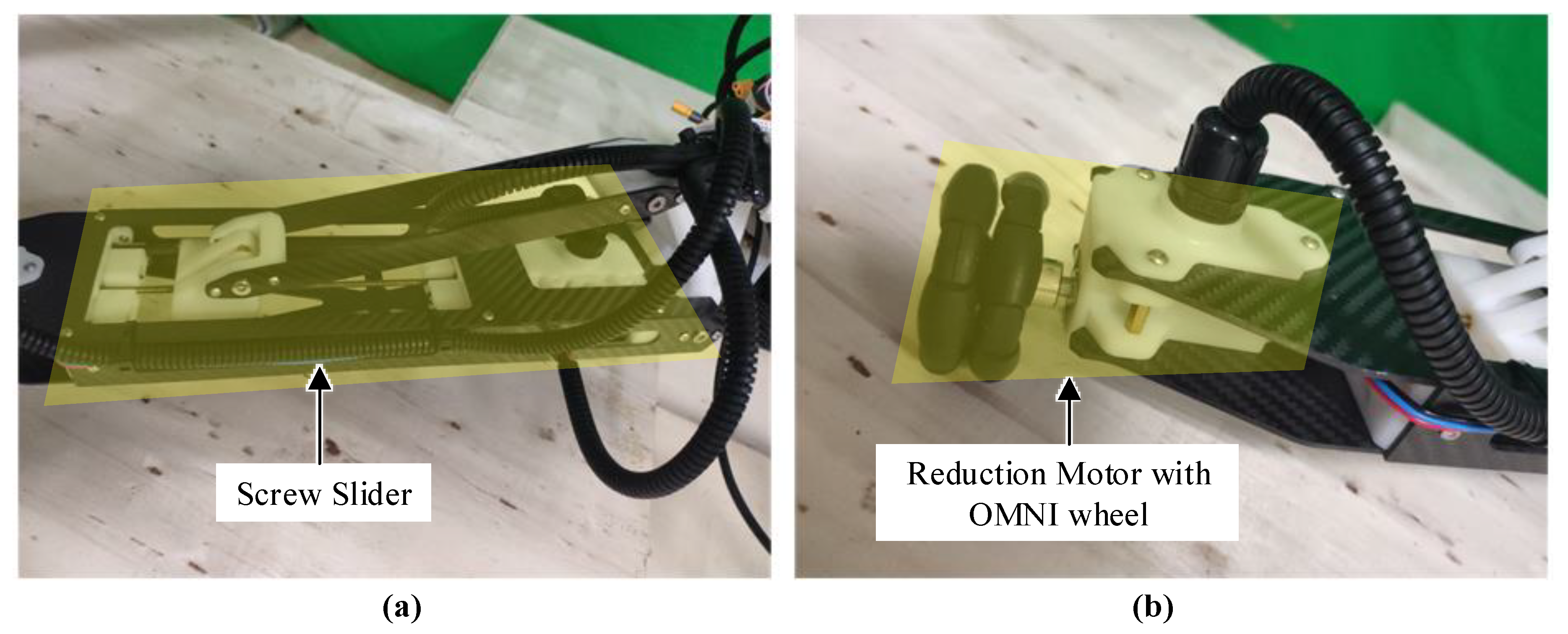
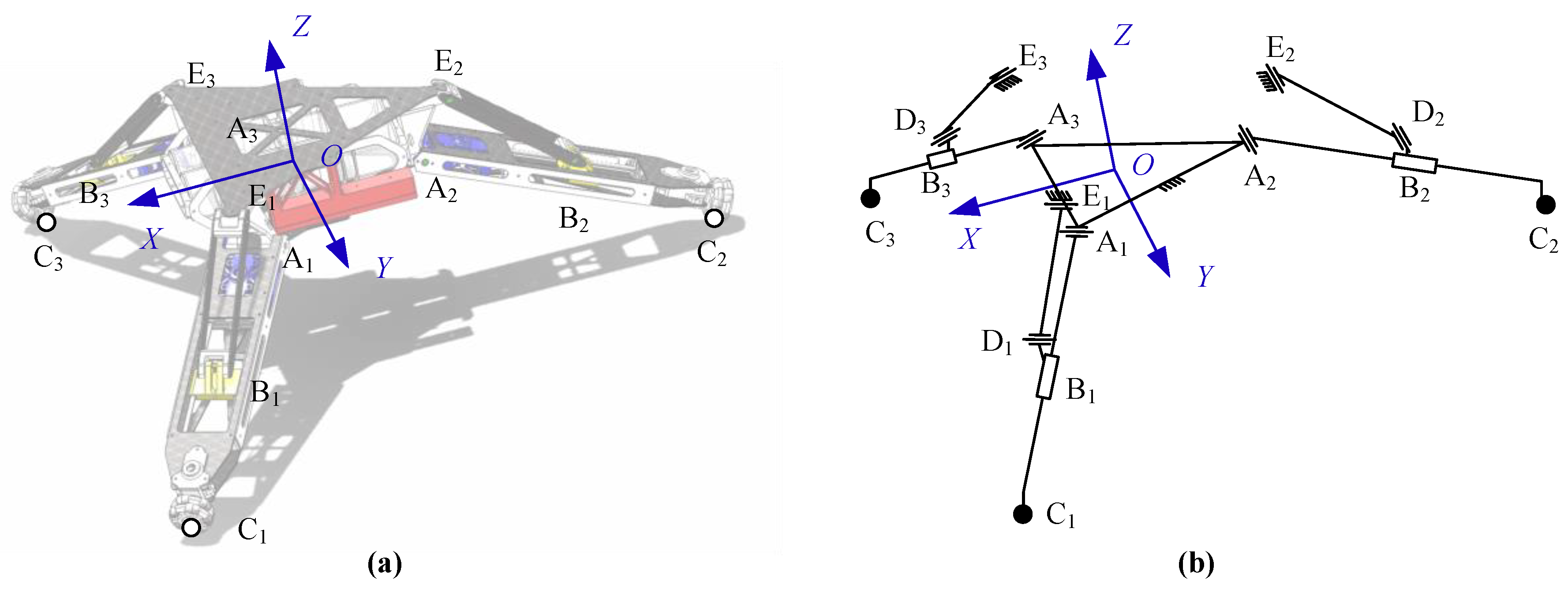
2.1. Mechanical Structure
2.2. Power System
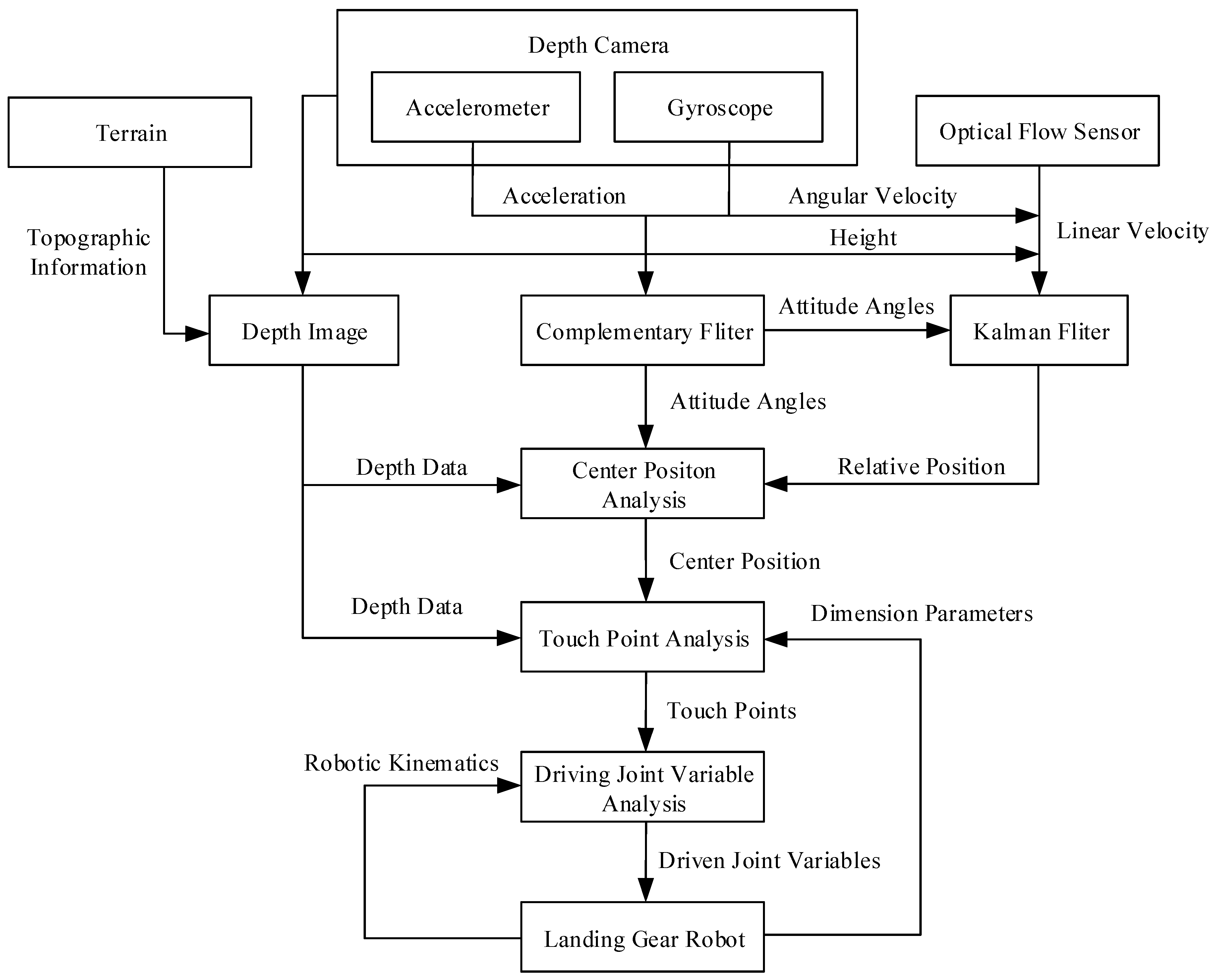
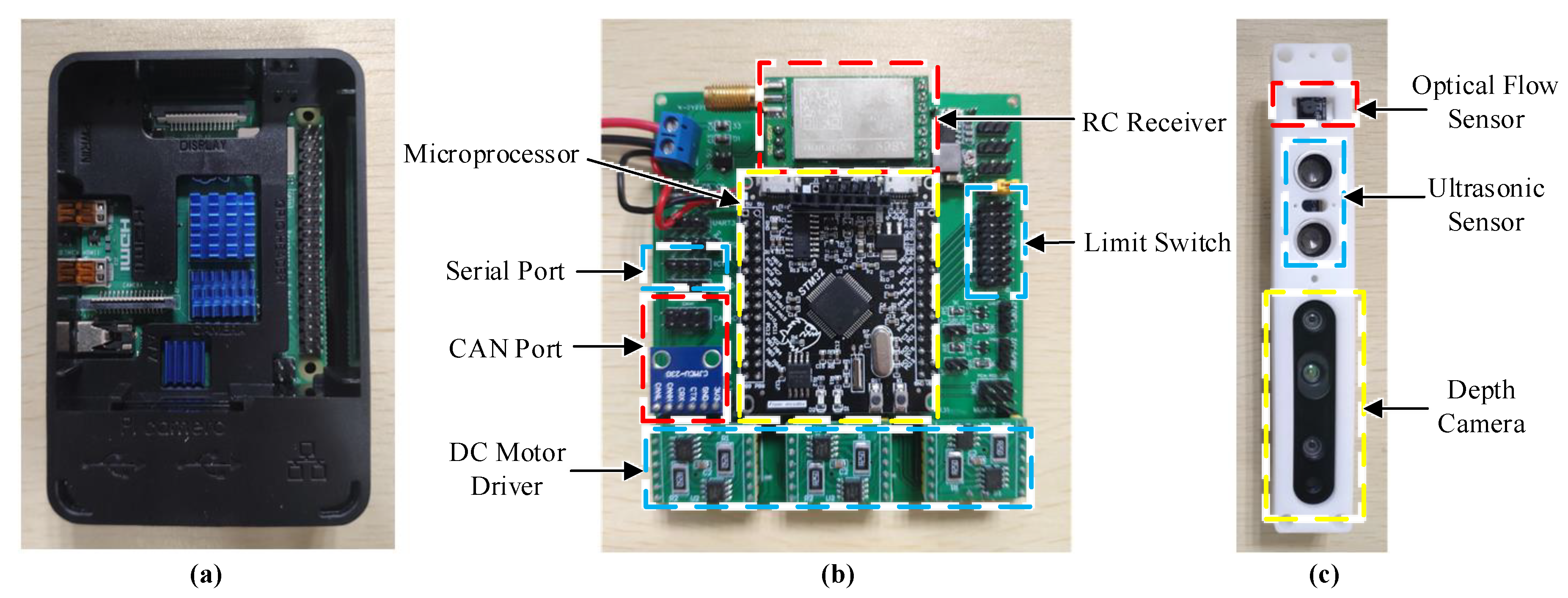
2.3. Sensor and Control System
3. Mathematical Analysis
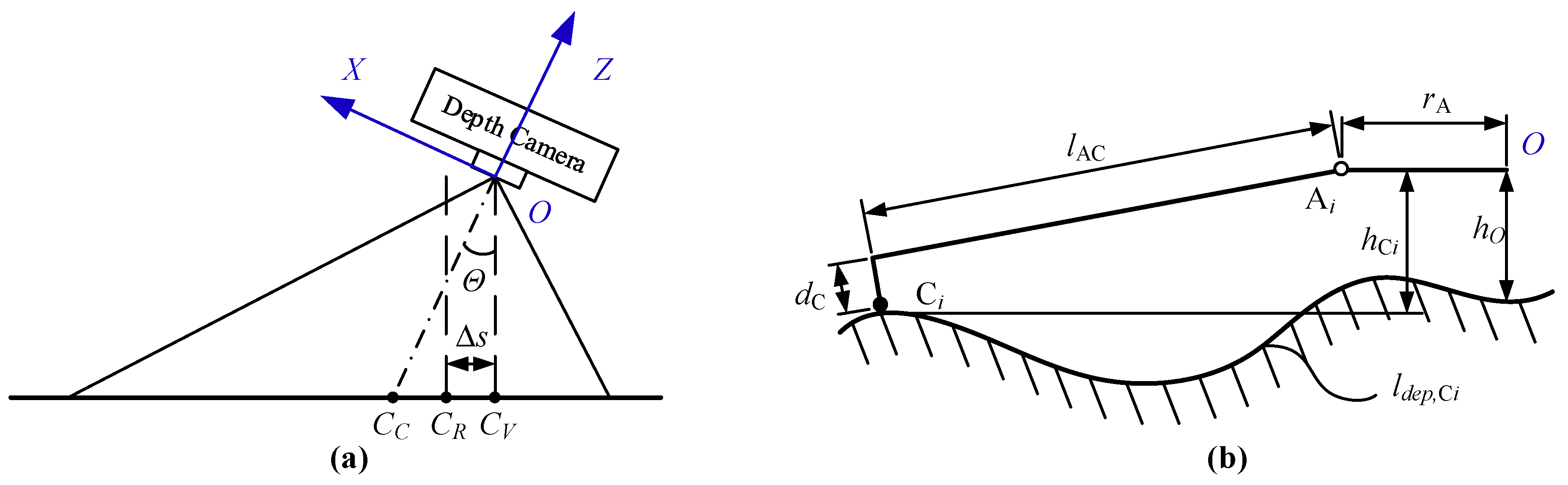
3.1. Robot Mathematical Model
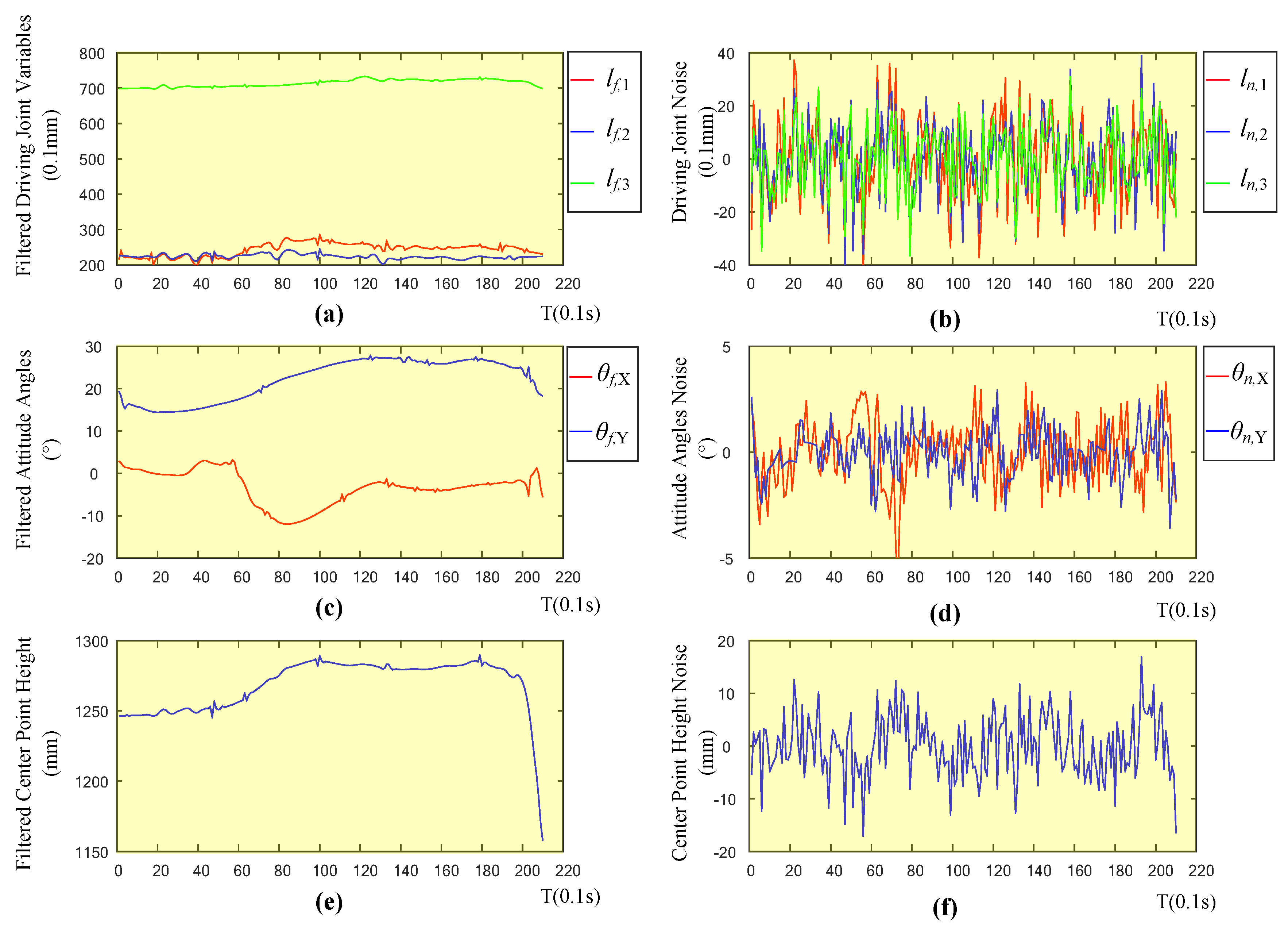
3.2. Complementary Filter
3.3. Kalman Filter
4. Control Algorithm Design
4.1. Adaptive Landing Process
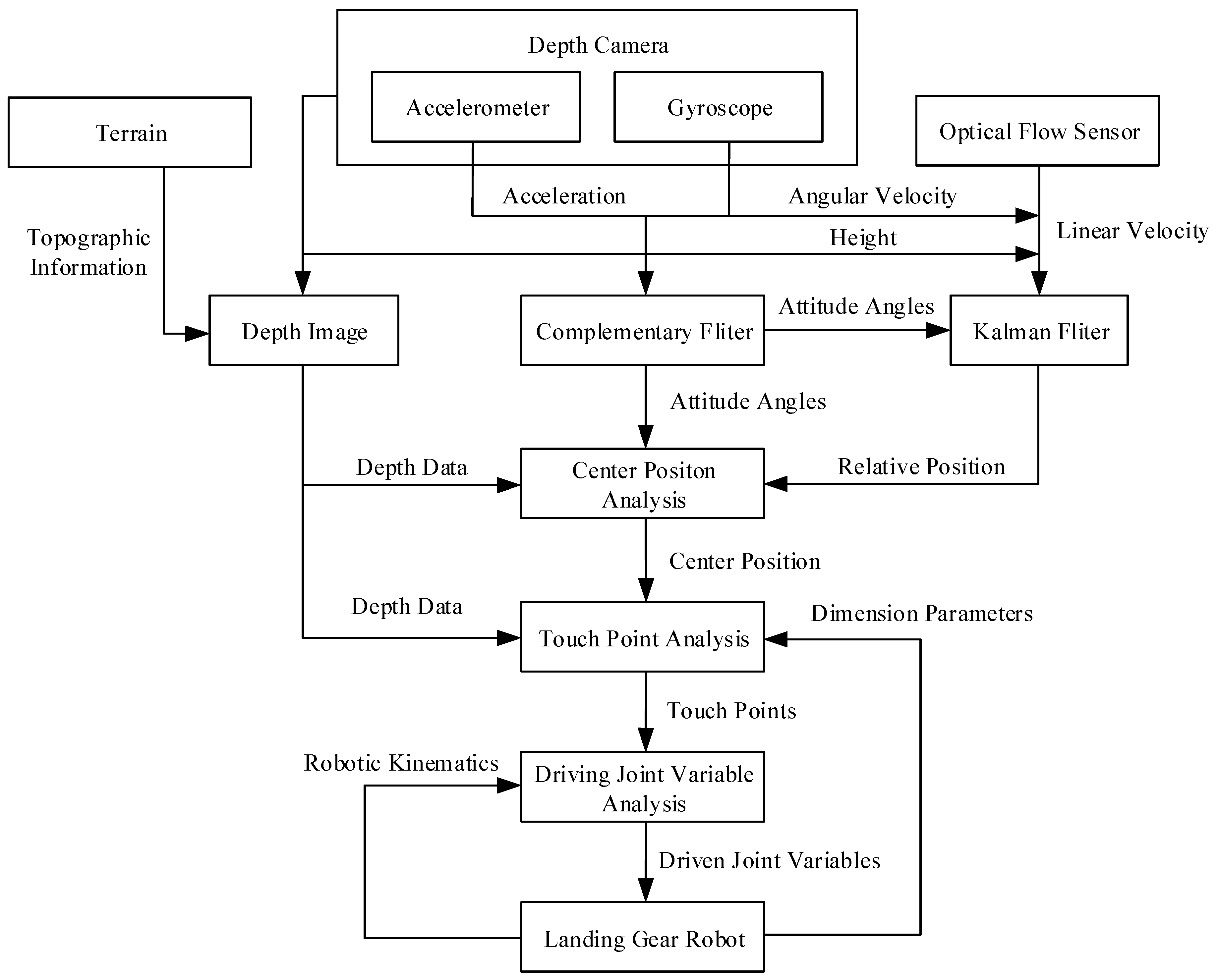
4.2. Algorithm Design
4.2.1. Center Position Analysis
4.2.2. Touch Point Analysis
4.2.3. Driving Variable Analysis
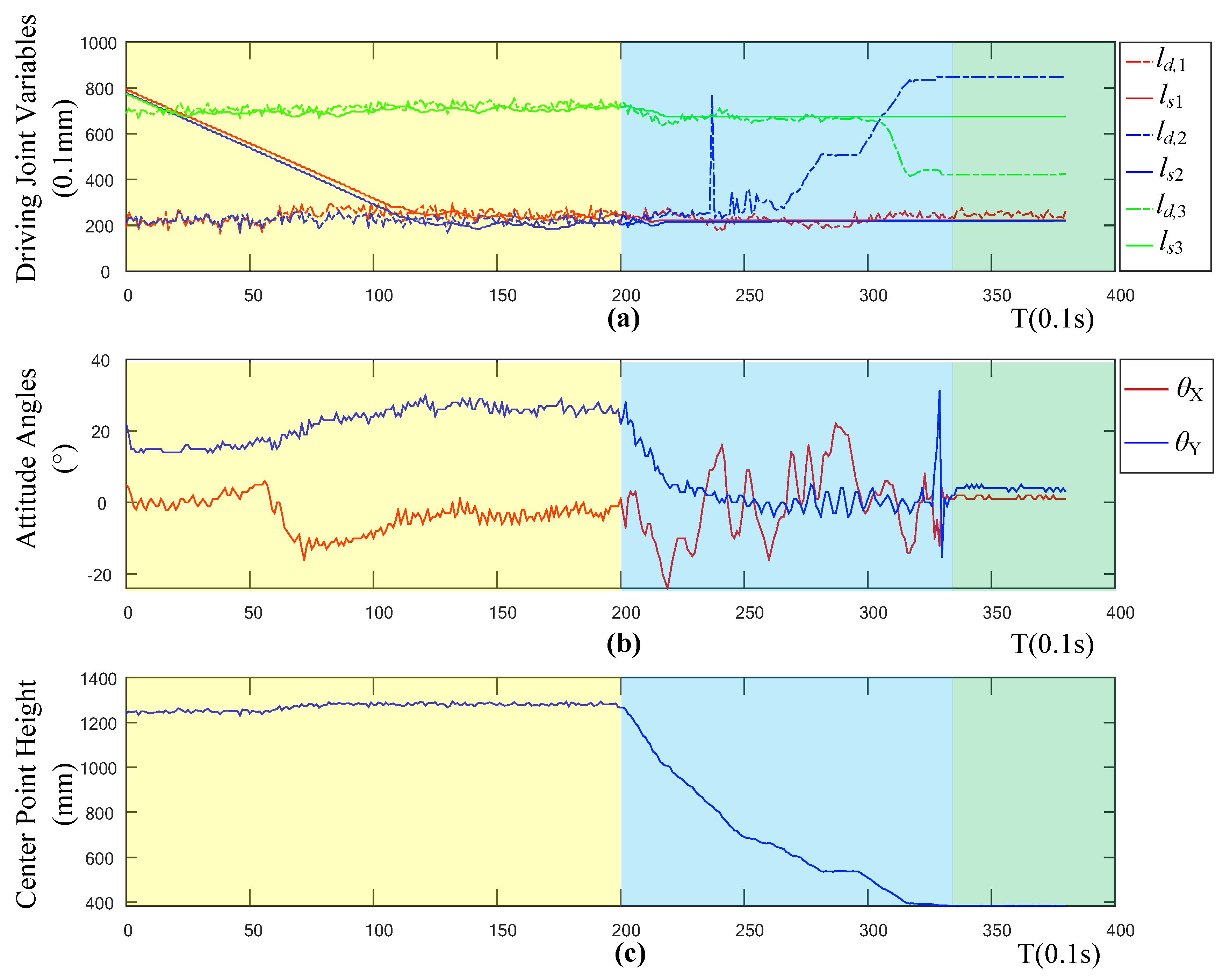
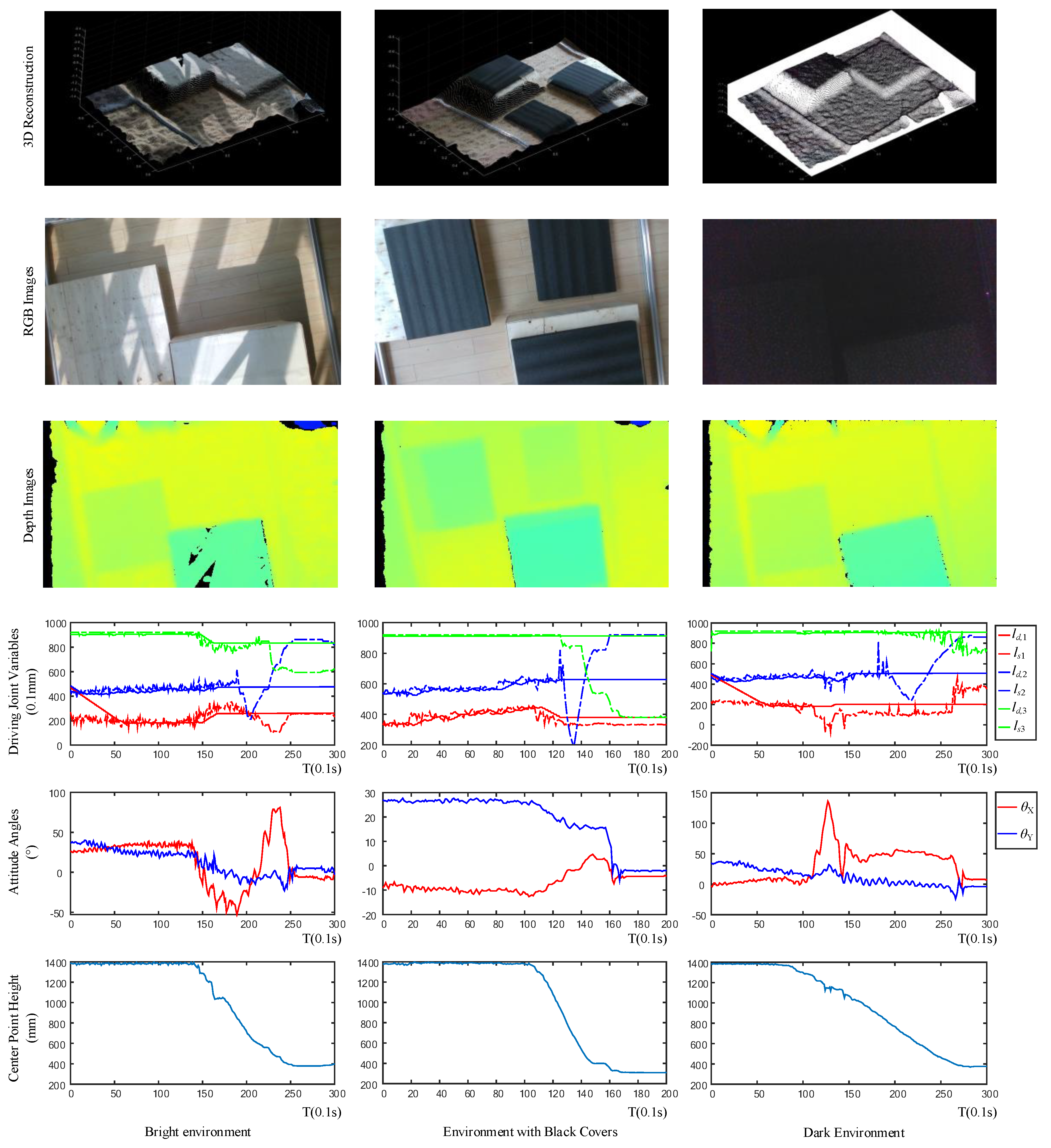
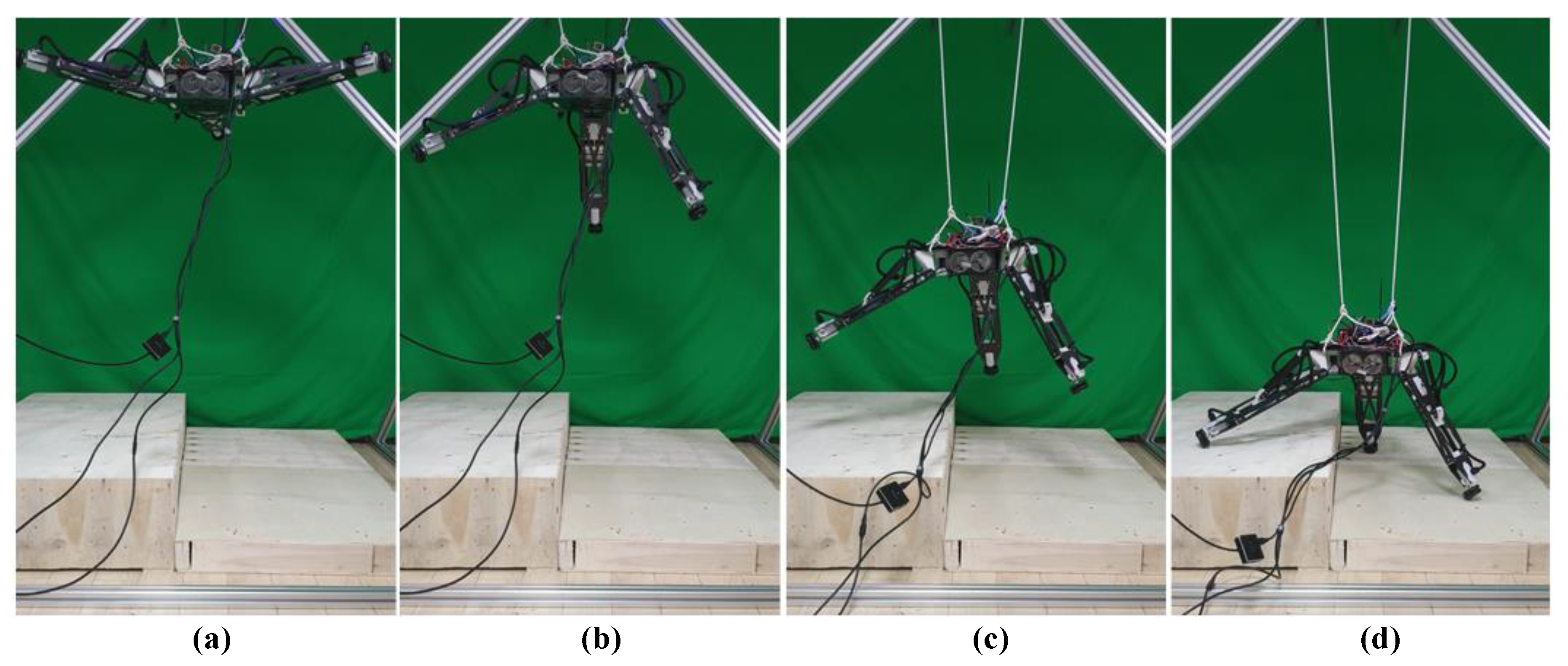
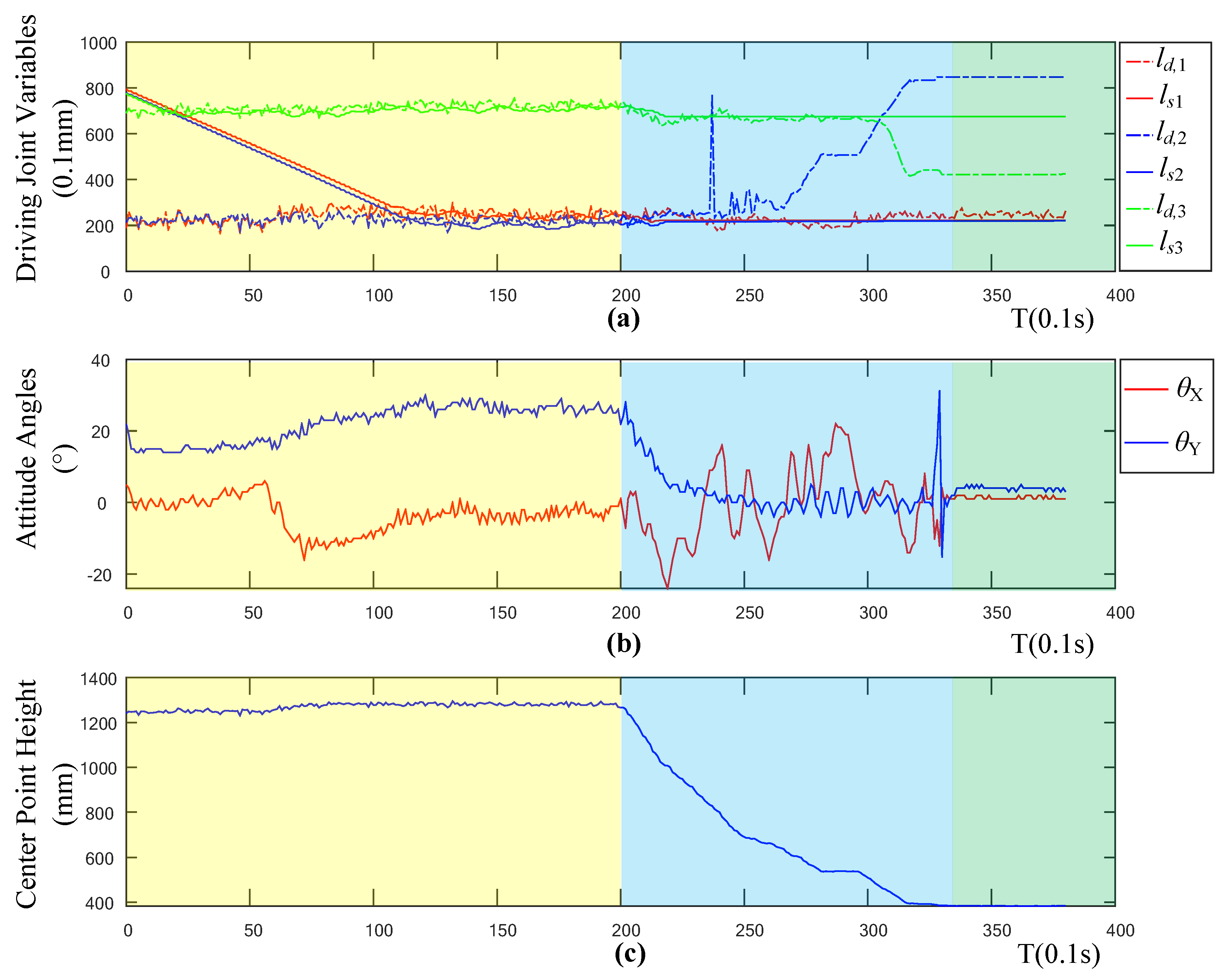
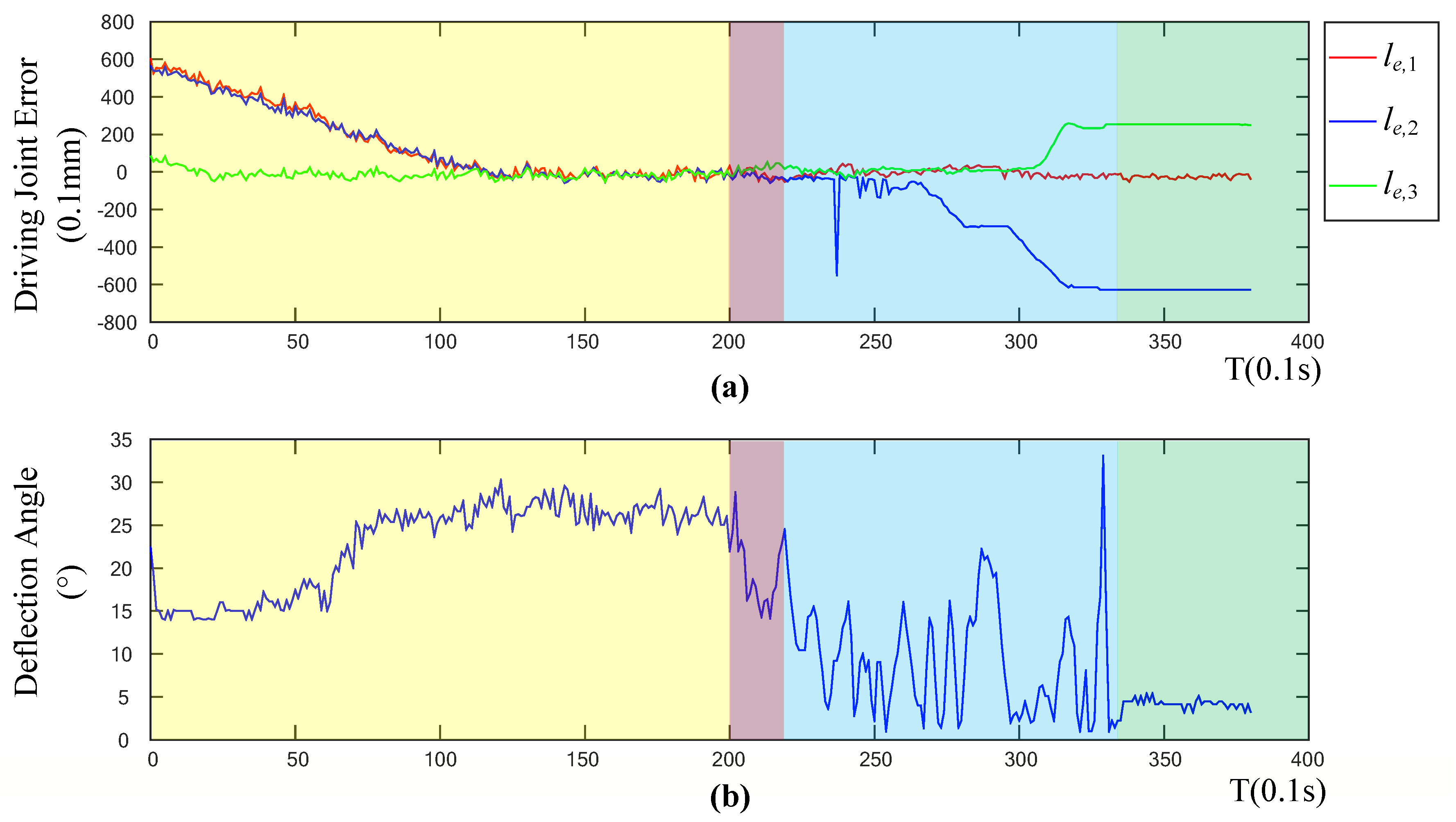
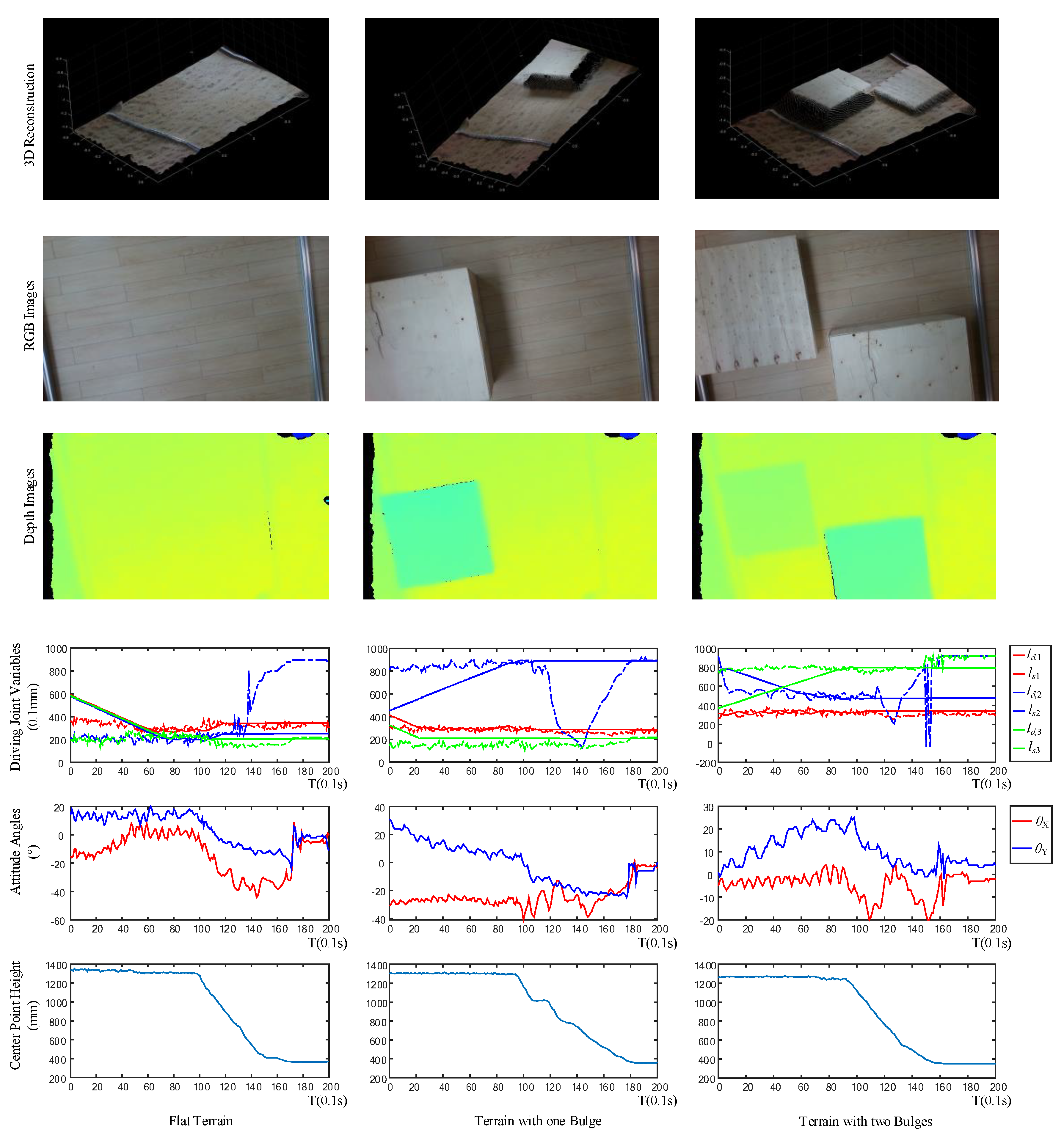
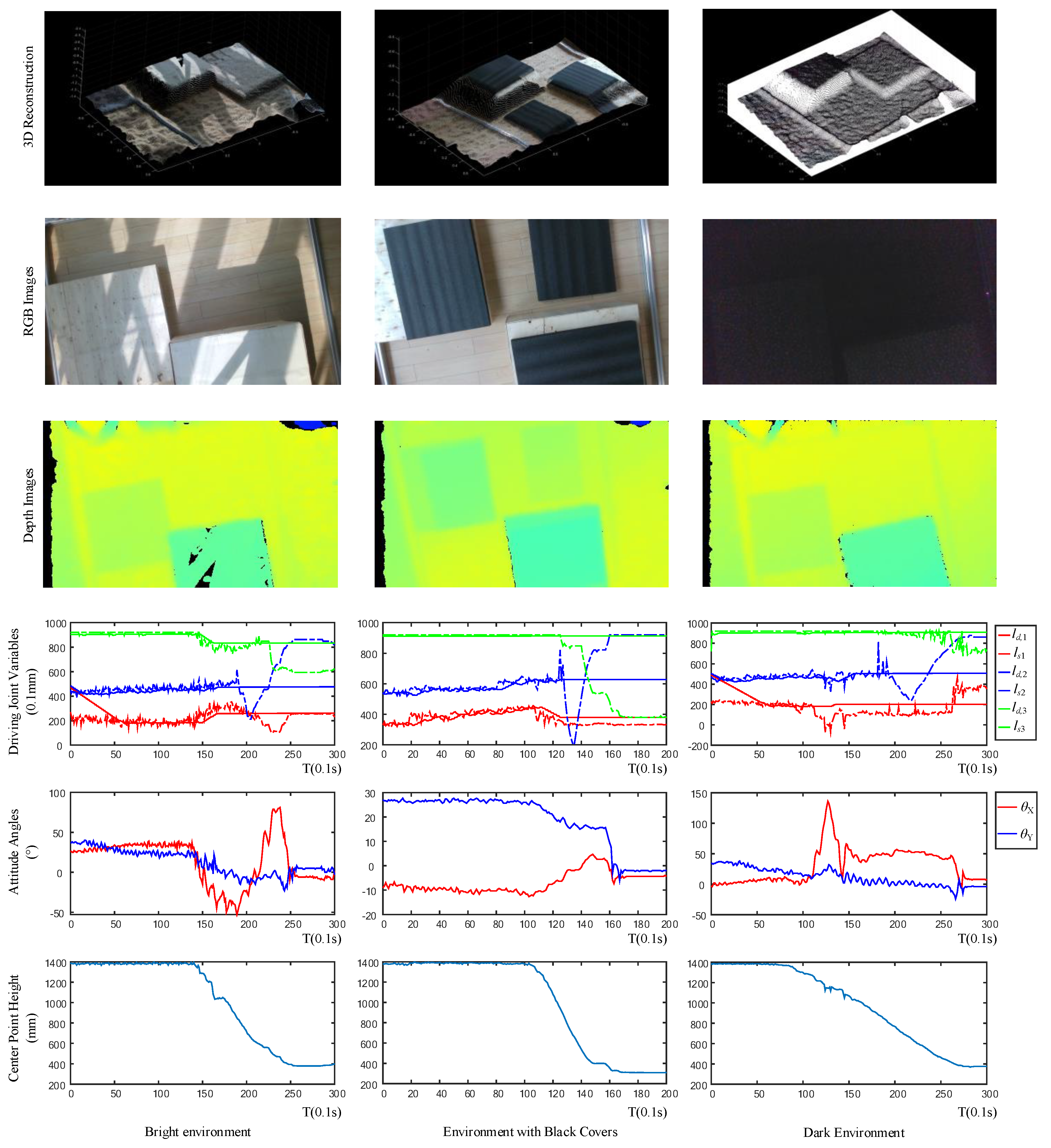
5. Experimental Test
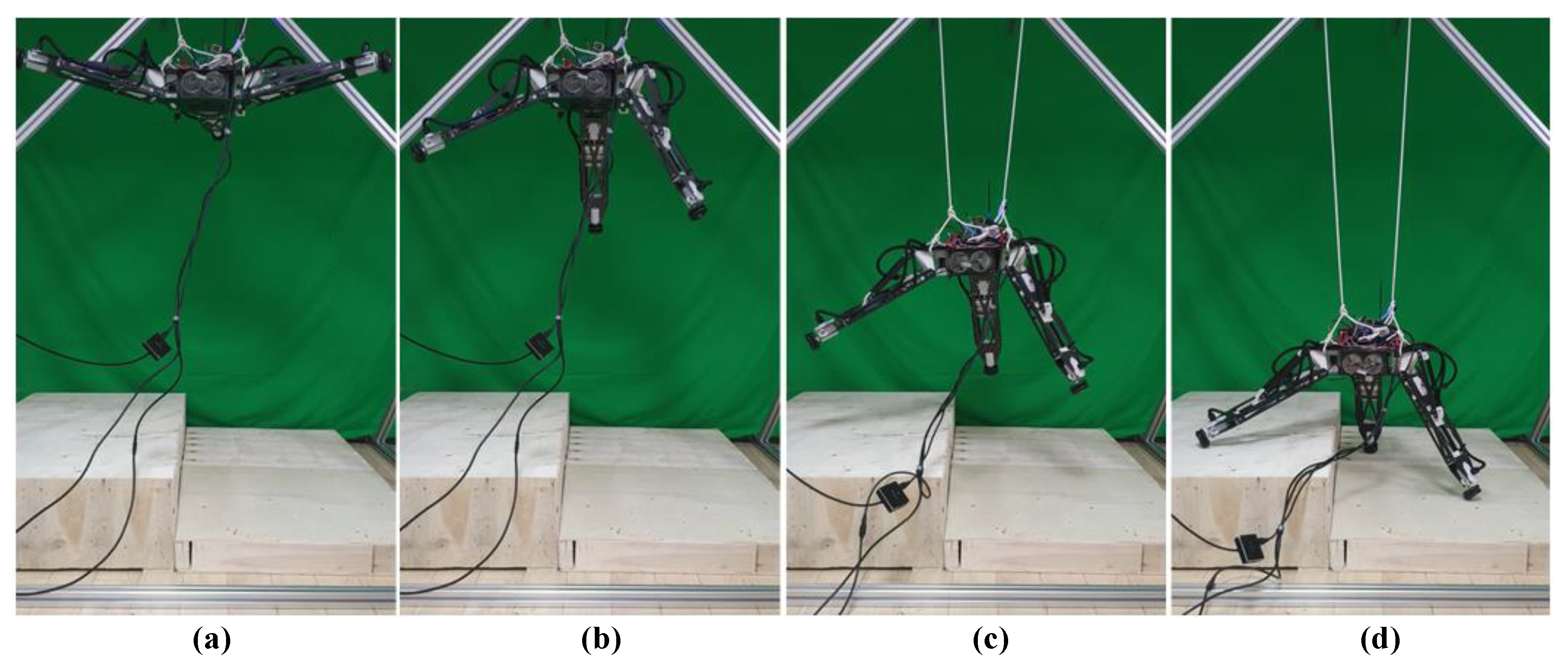
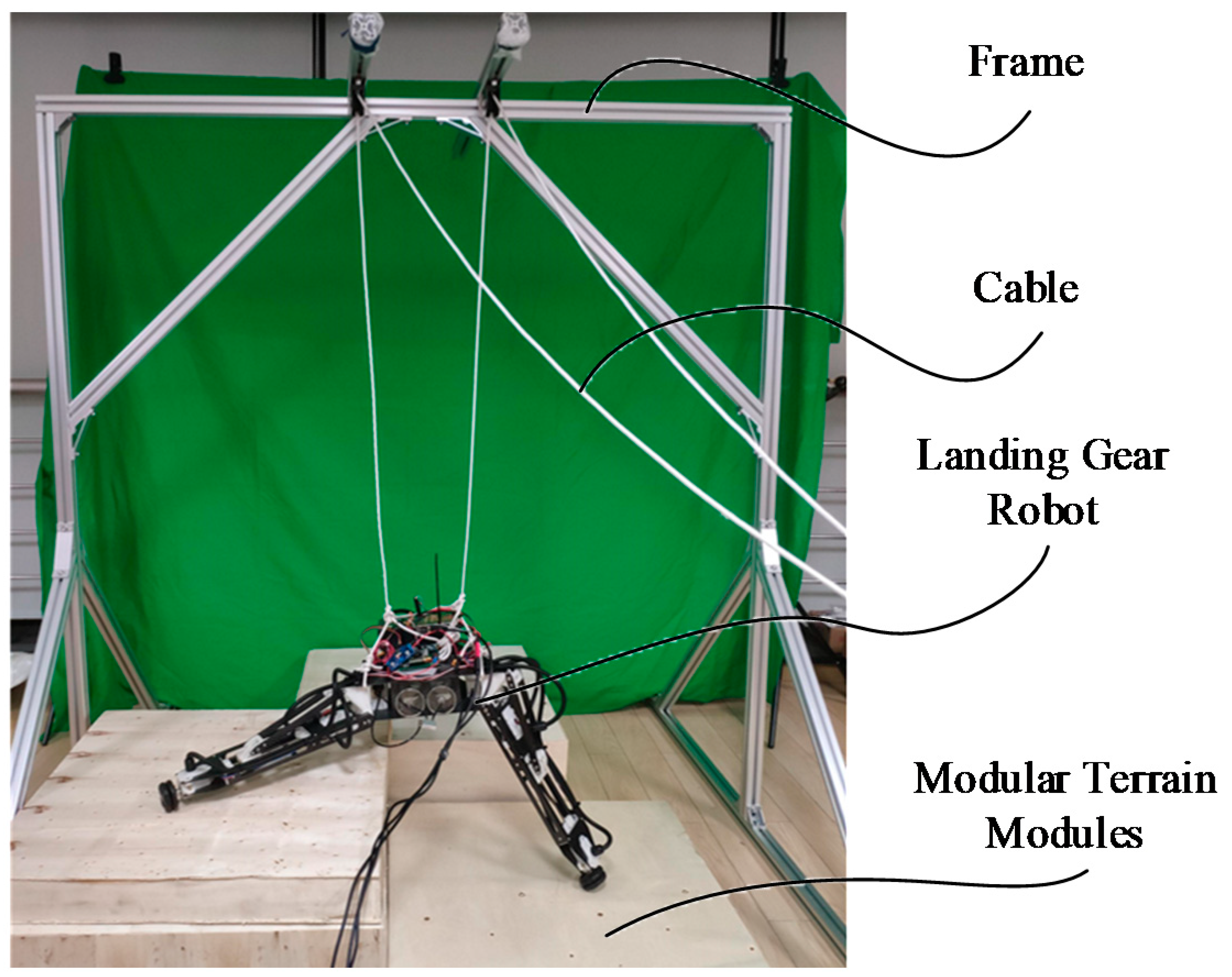
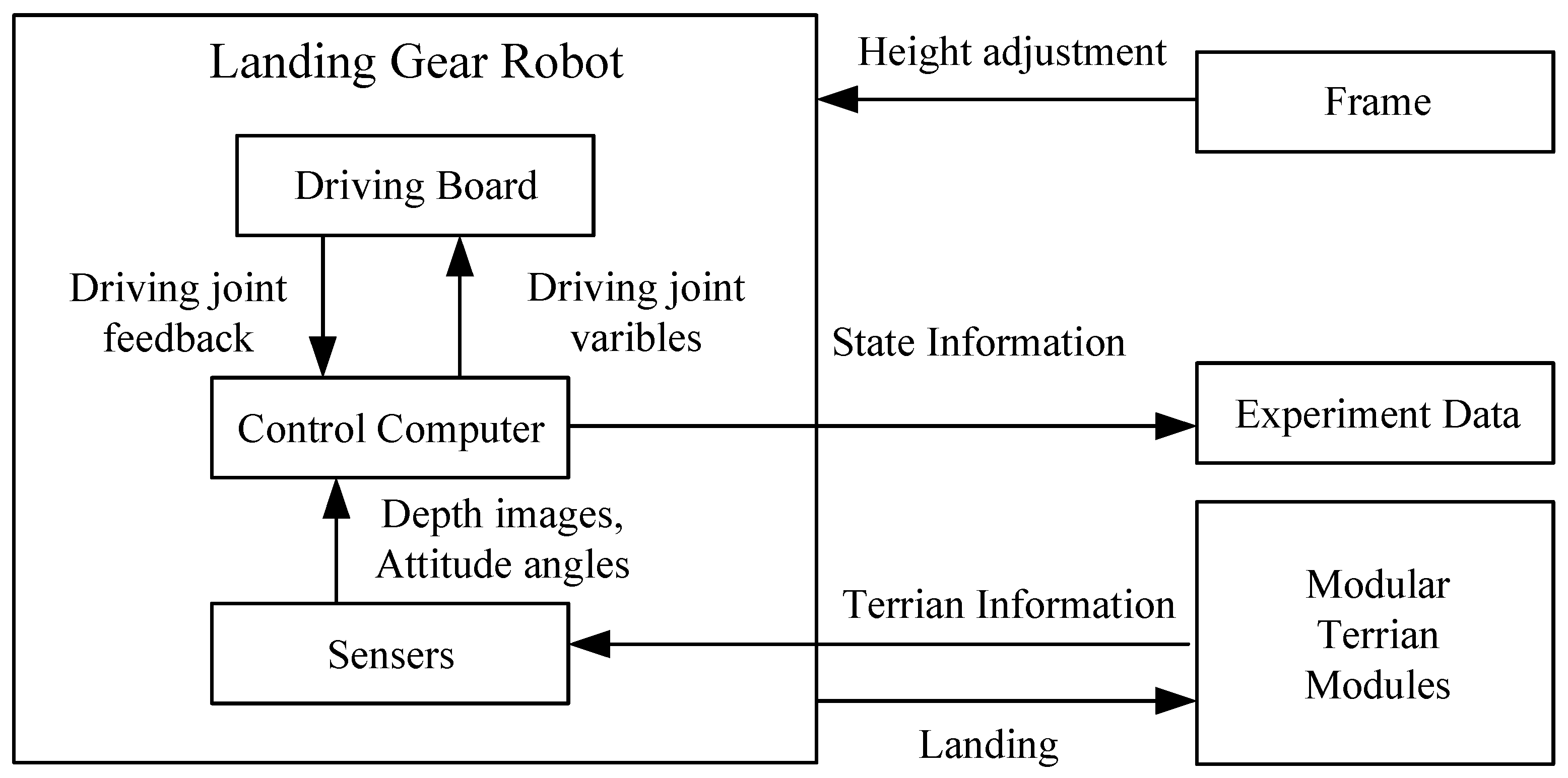
5.1. Experiment Platform and Process
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Robotic Landing Gear Could Enable Future Helicopters to Take Off and Land Almost Anywhere. Available online: https://www.darpa.mil/news-events/2015-09-10 (accessed on 9 October 2015).
- Stolz, B.; Brödermann, T.; Castiello, E.; Englberger, G.; Erne, D.; Gasser, J.; Hayoz, E.; Müller, S.; Muhlebach, L.; Löw, T. An adaptive landing gear for extending the operational range of helicopters. In Proceedings of the 2018 International Conference on Intelligent Robots and Systems (IROS 2018), Lanzhou, China, 24–27 August 2018; pp. 1757–1763. [Google Scholar]
- Boix, D.M.; Goh, K.; McWhinnie, J. Modelling and control of helicopter robotic landing gear for uneven ground conditions. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS 2017), Linköping, Sweden, 3–5 October 2017; pp. 60–65. [Google Scholar]
- Sarkisov, Y.S.; Yashin, G.A.; Tsykunov, E.; Tsetserukou, D. DroneGear: A Novel Robotic Landing Gear with Embedded Optical Torque Sensors for Safe Multicopter Landing on an Uneven Surface. IEEE Robot. Autom. Lett. 2018, 3, 1912–1917. [Google Scholar] [CrossRef]
- Miyata, K.; Sasagawa, T.; Doi, T.; Tadakuma, K. A Study of Leg-Type Landing Gear for Aerial Vehicles-Development of One Leg Model. J. Robot. Mechatron. 2011, 23, 266–270. [Google Scholar] [CrossRef]
- Di Leo, C.V.; Leon, B.; Wachlin, J.; Kurien, M.; Rimoli, J.J.; Costello, M. Cable-driven four-bar link robotic landing gear mechanism: Rapid design and survivability testing. In Proceedings of the 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 8–12 January 2018; pp. 0491:1–0491:25. [Google Scholar]
- Doyle, C.E.; Bird, J.J.; Isom, T.A.; Kallman, J.C.; Bareiss, D.; Dunlop, D.J.; King, R.J.; Abbott, J.J.; Minor, M.A. An Avian-Inspired Passive Mechanism for Quadrotor Perching. IEEE-Asme Trans. Mechatron. 2013, 18, 506–517. [Google Scholar] [CrossRef]
- Zhang, K.; Chermprayong, P.; Tzoumanikas, D.; Li, W.; Grimm, M.; Smentoch, M.; Leutenegger, S.; Kovac, M. Bioinspired design of a landing system with soft shock absorbers for autonomous aerial robots. J. Field Robot. 2019, 36, 230–251. [Google Scholar] [CrossRef] [Green Version]
- Tieu, M.; Michael, D.M.; Pflueger, J.B.; Sethi, M.S.; Shimazu, K.N.; Anthony, T.M.; Lee, C.L. Demonstrations of bio-inspired perching landing gear for UAVs. In Proceedings of the Bioinspiration, biomimetics, and Bioreplication 2016, Las Vegas, NV, USA, 20–24 March 2016; pp. 9797:1–9797:8. [Google Scholar]
- Luo, C.; Zhao, W.; Du, Z.; Yu, L. A neural network based landing method for an unmanned aerial vehicle with soft landing gears. Appl. Sci. 2019, 9, 2976. [Google Scholar] [CrossRef] [Green Version]
- Hu, D.; Li, Y.; Xu, M.; Tang, Z. Research on UAV Adaptive Landing Gear Control System. In Proceedings of the 2018 2nd International Conference on Artificial Intelligence, Automation and Control Technologies (AIACT 2018), Osaka, Japan, 26–29 April 2018; Volume 1061, p. 012019. [Google Scholar]
- Arns, M. Novel Reconfigurable Delta Robot Dual-Functioning as Adaptive Landing Gear and Manipulator; York University Press: Toronto, ON, Canada, 2019. [Google Scholar]
- Jia, R.; Jizhen, W.; Xiaochuan, L.; Yazhou, G. Terrain-adaptive Bionic Landing Gear System Design for Multi-Rotor UAVs. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC 2019), Nanchang, China, 3–5 June 2019; pp. 5757–5762. [Google Scholar]
- Huang, M. Control strategy of launch vehicle and lander with adaptive landing gear for sloped landing. Acta Astronaut. 2019, 161, 509–523. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Naldi, R.; Silvestre, C.; Cunha, R.; Marconi, L. Robust Landing and Sliding Maneuver Hybrid Controller for a Quadrotor Vehicle. IEEE Trans. Control. Syst. Technol. 2016, 24, 400–412. [Google Scholar] [CrossRef]
- Goh, K.; Boix, D.M.; Mcwhinnie, J.; Smith, G.D. Control of rotorcraft landing gear on different ground conditions. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 181–186. [Google Scholar]
- Ho, H.W.; De Croon, G.C.H.E.; Van Kampen, E.; Chu, Q.P.; Mulder, M. Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing. IEEE Trans. Robot. 2018, 34, 508–516. [Google Scholar] [CrossRef]
- Miller, A.B.; Miller, B.M.; Popov, A.K.; Stepanyan, K. UAV Landing Based on the Optical Flow Videonavigation. Sensors 2019, 19, 1351. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ho, H.W.; De Wagter, C.; Remes, B.D.W.; De Croon, G.C.H.E. Optical-flow based self-supervised learning of obstacle appearance applied to MAV landing. Robot. Auton. Syst. 2018, 100, 78–94. [Google Scholar] [CrossRef] [Green Version]
- Cheng, H.; Chen, T.; Tien, C. Motion Estimation by Hybrid Optical Flow Technology for UAV Landing in an Unvisited Area. Sensors 2019, 19, 1380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, H.; Chiang, M. The Integration of the Image Sensor with a 3-DOF Pneumatic Parallel Manipulator. Sensors 2016, 16, 1026. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bilal, D.K.; Unel, M.; Yildiz, M.; Koc, B. Realtime Localization and Estimation of Loads on Aircraft Wings from Depth Images. Sensors 2020, 20, 3405. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Yu, M.; Guo, H.; Xu, Y. Mobile Robot Indoor Positioning Based on a Combination of Visual and Inertial Sensors. Sensors 2019, 19, 1773. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Noise Reduction in Speech Processing; Pearson Correlation Coefficient; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. ISBN 978-3-642-00295-3. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| rA | 170 mm | lAC | 415 mm |
| rE | 220 mm | dC | 40 mm |
| hAE | 65 mm | lDE | 195 mm |
| dS | 22 mm |
| Coefficient | |||
|---|---|---|---|
| 0.7871 | 0.7602 | 0.8064 | |
| −0.1398 | −0.0615 | 0.0247 | |
| 0.1228 | 0.0421 | 0.1124 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, H.; Zhang, D.; Gan, Z. Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors 2020, 20, 4411. https://doi.org/10.3390/s20164411
Tang H, Zhang D, Gan Z. Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors. 2020; 20(16):4411. https://doi.org/10.3390/s20164411
Chicago/Turabian StyleTang, Hongyan, Dan Zhang, and Zhongxue Gan. 2020. "Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion" Sensors 20, no. 16: 4411. https://doi.org/10.3390/s20164411
APA StyleTang, H., Zhang, D., & Gan, Z. (2020). Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors, 20(16), 4411. https://doi.org/10.3390/s20164411