1. Introduction
1.1. Motivation
At present, the concept of autonomous driving is becoming more and more popular. Therefore, new techniques are being developed and researched to help consolidate the reality of implementing the concept. As systems become autonomous, their safety must be improved to increase user acceptance. Consequently, it is necessary to integrate intelligent fault detection systems that guarantee the security of passengers and people in the environment. Sensors, perception, localisation, or control systems are essential elements for their development. However, they are also susceptible to failures and it is necessary to have fail-x systems, which prevent undesired or fatal actions. A fail-x system combines the following features: redundancy in design (fail-operational), ability to plan emergency manuevers and undertake safe stops (fail-safe), and monitoring the status of their sensors to detect failures or malfunctions in them (fail-aware). At present, in an urban environment where there are increasingly complex traffic elements such as multiple intersections, complex lane roundabouts, or tunnels, a localisation system based only on GPS may pose problems. Thus, autonomous driving will be a closer reality when LiDAR or Visual odometry systems are integrated to cover fail-operational functions. However, fail-aware behaviour has to be integrated into the global system also.
At present, the Global Positioning System (GPS) performs the main tasks of localisation due to its robustness and accuracy. However, GPS coverage problems derived from structural elements of the road (tunnels), GPS multi-path in urban areas, or failure in its operation, mean that this technology does not meet the necessary localisation requirements in 100% of use-cases, which makes it essential to design redundant systems based on LiDAR odometry [
1], Visual odometry [
2], Inertial Navigation Systems (INS) [
3], Wifi [
4], or a combination of the above, including digital maps [
5]. However, LiDAR and Visual odometry systems suffer from a non-constant temporal drift, where the characteristics of the environment and the algorithm behaviour are determinants that improve or worsen this drift. Therefore, it is necessary to introduce, for those systems that have a non-constant temporal drift, a fail-aware indicator to discern when these can be used.
1.2. Problem Statement
Safe behaviour in a vehicle’s control and navigation systems depends mostly on the redundancy and failure detections that these present. At the moment, when GPS-based localisation fails, either temporarily or permanently, the LiDAR and Visual odometry systems can start as redundant localisation systems, mitigating the erroneous behaviour of the GPS localisation. Redundant localisation based on 3D mapping techniques can be applied, as well. However, this is currently more widespread in robotic applications, as the 3D map accuracy in open environments is decisive for localisation tasks. However, companies such as Mapillary and Here have presented promising results for 3D map accuracy. Why is it challenging to build an accurate 3D map when relying only on GPS localisation? It is because the GPS angular error feature of market devices is close to rad. This feature can place a 3D object with an error of 0.01 m when the object distance from the sensor is 100 m.
So, in the case of integrating redundancy into the localisation system with an odometry alternative, a fail-aware indicator has to be integrated into the odometry system, as a consequence of the non-constant drift error, in order for it to be used as a redundant system. The fail-aware indicator could be based on an estimated time window that satisfies a localisation error below the minimum requirements to planned emergency manoeuvring and placing the vehicle in a safe spot. Several alternatives can be presented to implement the fail-aware indicator. The first is to set a fixed time window in which the system is used. The second alternative is an adaptive time window, which is evaluated dynamically in the continuous localisation process to find the maximum time in which the redundant system can be used. At present, there have been no recent works focused on fail-aware LIDAR-based odometry for autonomous vehicles.
Therefore, it is necessary to look for an odometry process that maximises the time in exceeding the threshold that leads the system to a failure state and, for that purpose, we propose a robust, scalable, and precise localisation design that minimises the error in each iteration. Multiple measurement fusion techniques from both global positioning systems and odometry systems are used to make the system robust. Bayesian filtering guarantees an optimal fusion between the observation techniques applied in the odometry systems and improves the localisation accuracy by integrating (mostly kinematic) models of the vehicle’s displacement, having either three or six degrees of freedom (DoF). The LiDAR odometry is based exclusively on the observations of the LiDAR sensor, where the emission of near-infrared pulses and the measurement of the reflection time allows us to represent the scene with a set of 3D points, called a Point Cloud. Thus, given a temporal sequence of measurements, we obtain the homogeneous transformation, rotation, and translation corresponding to two consecutive time instants, by applying iterative registering and optimisation methods. However, this process alone provides incorrect homogeneous transformations if the scene presents moving objects and, so, solutions based on feature detection must be explored in order to mitigate possible errors.
1.3. Contributions
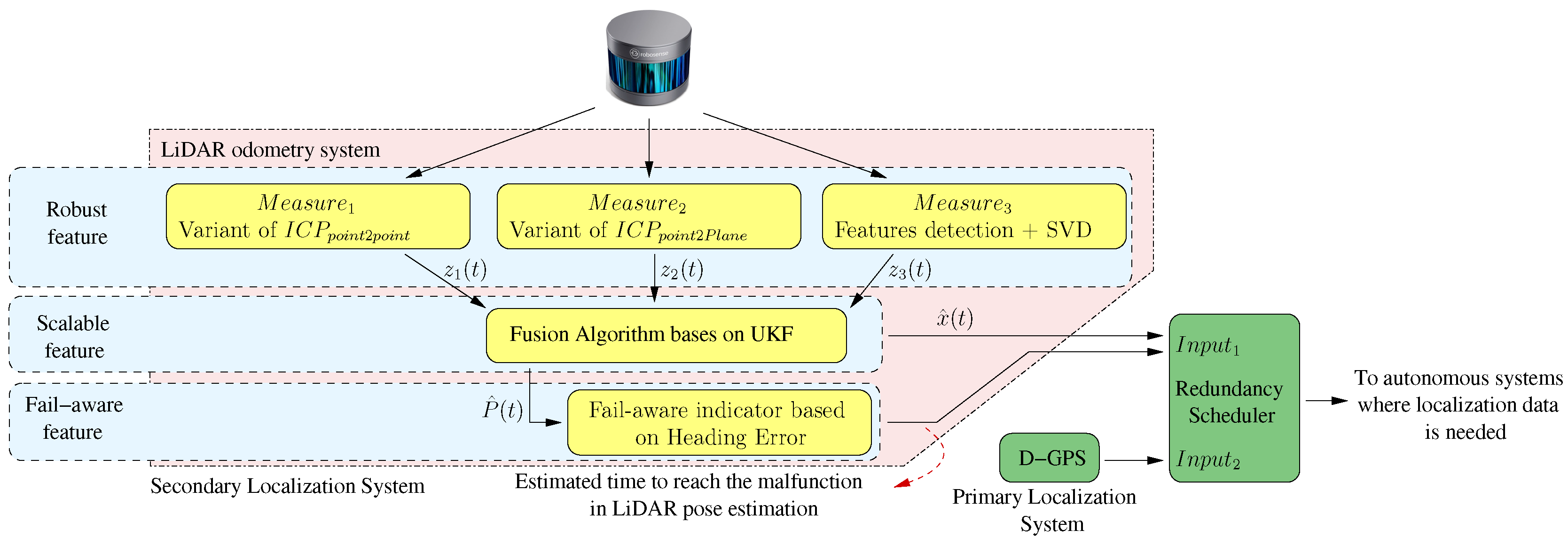
The factors described previously motivated us to develop an accurate LiDAR odometry system with a fail-aware indicator ensuring its proper use as a redundant localisation system for autonomous vehicles, as shown in
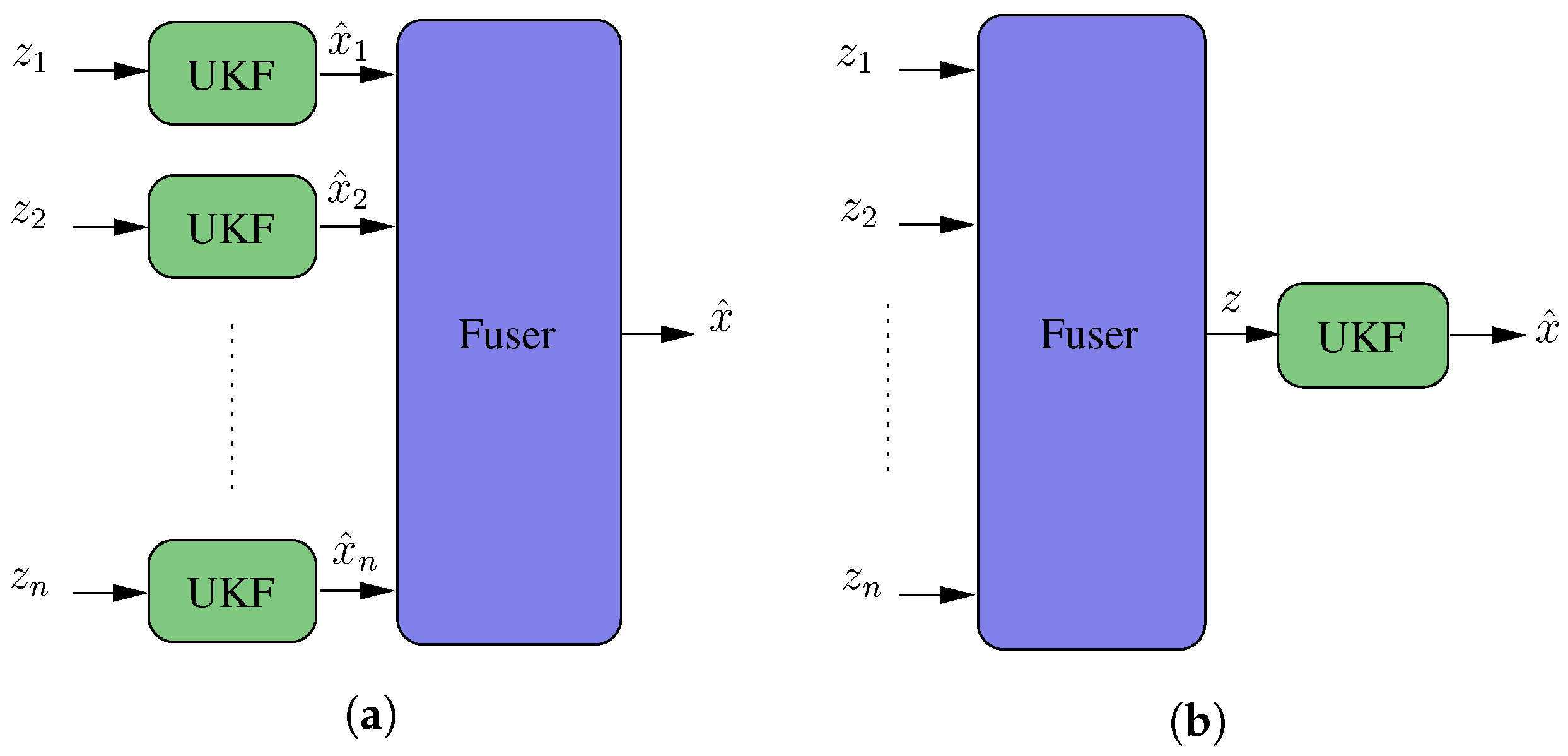
Figure 1. The accurate LiDAR odometry architecture is based on robust and scalable features. The architecture has a robust measurement topology as it integrates three measurement algorithms, two of which are based on Iterative Closest Point (ICP) variants, and the third one is based on non-mobile scene feature extraction and Singular Value Decomposition (SVD). Furthermore, our work proposes a scalable architecture to integrate a fusing block, which relies on the UKF scheme. Another factor taken into account to enhance the odometry accuracy was to incorporate a 6-DoF motion model based on vehicle dynamics and kinematics within the filter, where the variables of pitch and roll play a crucial impact on the precision. The proposed scalable architecture allows us to fuse any position measurement system or integrate into the LiDAR odometry system new measurement algorithms in a natural way. A fail-aware indicator based on the vehicle heading error is another contribution to the state-of-the-art. The fail-aware indicator introduces, in the system output, an estimated time to reach system malfunction, which enables other systems to take it into consideration.
The global system is validated by processing KITTI odometry data set sequences and evaluating the error committed in each of the available sequences, allowing for comparison with other state-of-the-art techniques. The variability in the available scenes allows us to validate the fail-aware functionality, by comparing sequences with low operating error with those with higher error, and observing how the temporal estimation factor increases for those sequences with worse results.
The rest of the paper is comprised of the following sections:
Section 2 presents the state-of-the-art in the areas of LiDAR odometry and vehicle motion modelling.
Section 3 details the integrated 6-DoF model, while
Section 4 explains the global software architecture of the work, as well as the methodology applied to fuse the evaluated measures. Then,
Section 5 describes the details of the proposed measurement systems.
Section 6 describes the methodology to make the systems fail-aware.
Section 7 describes, lists, and compares the results obtained by the developed system. Finally,
Section 8 presents our conclusions and proposes a description of future work in the fields of odometry techniques, 3D mapping, and fail-aware systems.
2. Related Works
Many contemporary conceptual systems for autonomous driving require precise localisation systems. The geo-referenced localisation system does not usually satisfy such precision, as there are scenarios (e.g., tunnel or forest scenarios) where the localisation provided by GPS is not correct or has low accuracy, leading to safety issues and non-robust behaviours. For these reasons, GPS-based localisation techniques do not satisfy all the use-cases of driverless vehicles, and it is therefore mandatory to integrate other technologies into the final localisation system. Visual odometry systems could be candidates for such a technology, but scenarios with few characteristics or extreme environmental conditions lead to their non-robust performance, although considerable progress has been made in this area, as described in [
6,
7]. Nevertheless, LiDAR odometry systems mitigate part of the visual-related problems, but real-time features or accuracy in the algorithm remain issues. In the same way as Visual Odometry, significant advances and results have been obtained, in the last few years, in this topic.
The general challenge in odometry is to evaluate a vehicle’s movement at all times without error, in order to obtain zero global localisation error; however, this issue is not reachable as the odometry measurement commits a small error in each iteration. These systems therefore have the weakness of drift error over time due to the accumulation of iterative errors; which is a typical integral problem. Drift error is a function of path length or elapsed time. However, these techniques have advanced in the last few decades, due to the improvement of sensor accuracies, achieving small errors (as presented in [
8]).
LIDAR odometry is based on the procedures of point registration and optimisation between two consecutive frames. Many works have been inspired by these techniques, but they have the disadvantage of not ensuring a global solution, introducing errors in their performances. These techniques are called Iterative Closest Points (ICP), many of which have been described in [
9], where modifications affecting all phases of the ICP algorithm were analysed, from the selection and registration of points to the minimisation approach. The most widely used are ICP point-to-point
[
10,
11] and ICP point-to-plane
[
12,
13]. For example, presented a point-to-point ICP algorithm based on two stages [
10], in order to improve its exactness. Initially, a coarse registration stage based on KD-tree is applied to solve the alignment problem. Once the first transformation is applied, a second fine-recording stage based on KD-tree ICP is carried out, in order to solve the convergence problem more accurately.
Several optimisation techniques have been proposed for use when the cost function is established. Obtaining a rigid transformation is one of the most commonly used schemes, as has been detailed in the simplest ICP case [
14], as well as in more advanced variants such as CPD [
15]. This is easily achieved by decoupling the rotation and translation, obtaining the first using algebraic tools such as SVD (Singular Value Decomposition), while the second term is simply the mean/average translation. Other proposals, such as LM-ICP [
16] or [
11], perform a Levenberg–Marquardt approach to add robustness to the process. Finally, optimisation techniques such as gradient descent have been used in distribution-to-distribution methods like D2D NDT [
17].
In order to increase robustness and computational performance, interest point descriptors for point clouds have recently been proposed. General point cloud or 2D depth maps are two general approaches to achieve this. The latter may include curvelet features, as analysed in [
18], assuming the range data is dense and a single viewpoint is used in order to capture the point cloud. However, it may not perform accurately for a moving LiDAR—the objective of this paper. In a general point cloud approach, Fast Point Feature Histograms (FPFH) [
19] and Integral Volume Descriptors (IVD) [
20] are two feature-based global registration proposals of interest. The first one generates feature histograms, which have demonstrated great results in vision object detection problems, using such techniques as Histogram of Oriented Gradients (HOG), by means of computing some statistics about a point’s neighbours relative positions and estimated surface normals. Feature histograms have shown the best IVD performances and surface curvature estimates. However, neither of these methods offer reliable results in sparse point clouds and are slow to compute.
Once one correspondence has been established, using features instead of proximity, it can be used to initialize ICP techniques in order to improve their results. As described in previous paragraphs, this transformation can also be found by other techniques, such as PCA or SVD, which are both deterministic procedures. In order to obtain a transformation, three point correspondences are enough, as is shown in the proposal we introduce in this document. However, as many outlier points are typically present in a point cloud (such as those of vegetation), a random sample consensus (RANSAC) approach is usually used [
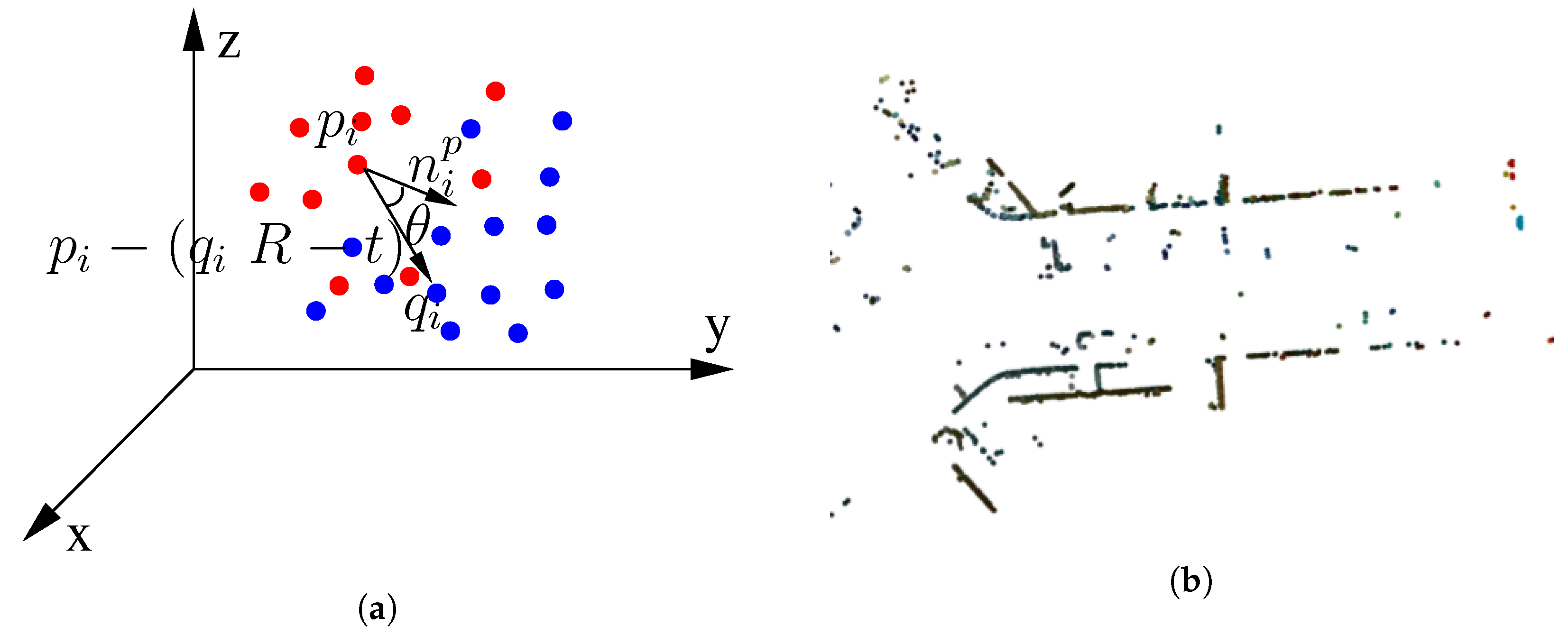
19]. Other approaches include techniques tailored to the specific problem, such as the detection of structural elements of the scene [
21].
In the field of observations or measurements, there are a large number of methods for measuring the homogeneous transformation between two moments or two point clouds. For this reason, many filtering and fusion systems have been applied to improve the robustness of systems. The two most widespread techniques to filter measurements are recursive filtering and batch optimisation [
22]. Recursive filtering updates the status probabilistically, using only the latest sensor observations for status prediction and process updates. The Kalman filter and its variants mostly represent recursive filtering techniques. However, filtering based on batch optimisation maintains a history of observations to evaluate, on the basis of previous states, the most probable estimate of the current instant. Both techniques may integrate kinematic and dynamic models of the system under analysis to improve the process of estimating observations. In the field of autonomous driving, the authors of [
23] justified the importance of applying models in the solution of driving problems, raising the need to work with complex models that correctly filter and fuse observations.
The best odometry system described in the state-of-the-art is VLOAM [
8], which is based on Visual and LiDAR odometry. It is characterised by being a particularly robust method in the face of an aggressive movement and the occasional lack of visual features. The method starts with a stage of visual odometry, in order to obtain a first approximation of the movement. The final stage is executed with LiDAR odometry. The results shown applied to a set of ad-hoc tests and the KITTI odometry data set. The work presented as LIMO [
24] also aimed to evaluate the movement of a vehicle accurately. Stereo images with LiDAR were used to provide depth information to the features detected by the cameras. The process includes a semantic segmentation, which is used to reject and weight characteristic points used for odometry. The results given were related to the KITTI data set. On the other hand, the authors of [
25] presented a LiDAR odometry technique that models the projection of the point cloud in a 2D ring structure. Over the 2D structure, an unsupervised Convolutional Auto-Encoder (CAE-LO) system detects points of interest in the spherical ring (CAE-2D). It later extracts characteristics from the multi-resolution voxel model using 3D CAE. It was characterised as finding 50% more points of interest in the point cloud, improving the success rate in the cloud comparison process. To conclude, the system described in [
26] proposed a real-time laser odometry approach, which presented small drift. The LiDAR system uses inertial data from the vehicle. The point clouds are captured in motion, but are compensated with a novel sweep correction algorithm based on two consecutive laser scans and a local map.
To the best of our knowledge, there have been no recent works focused on fail-aware LiDAR-based odometry for autonomous vehicles.
3. Kinematic and Dynamic Vehicle Model
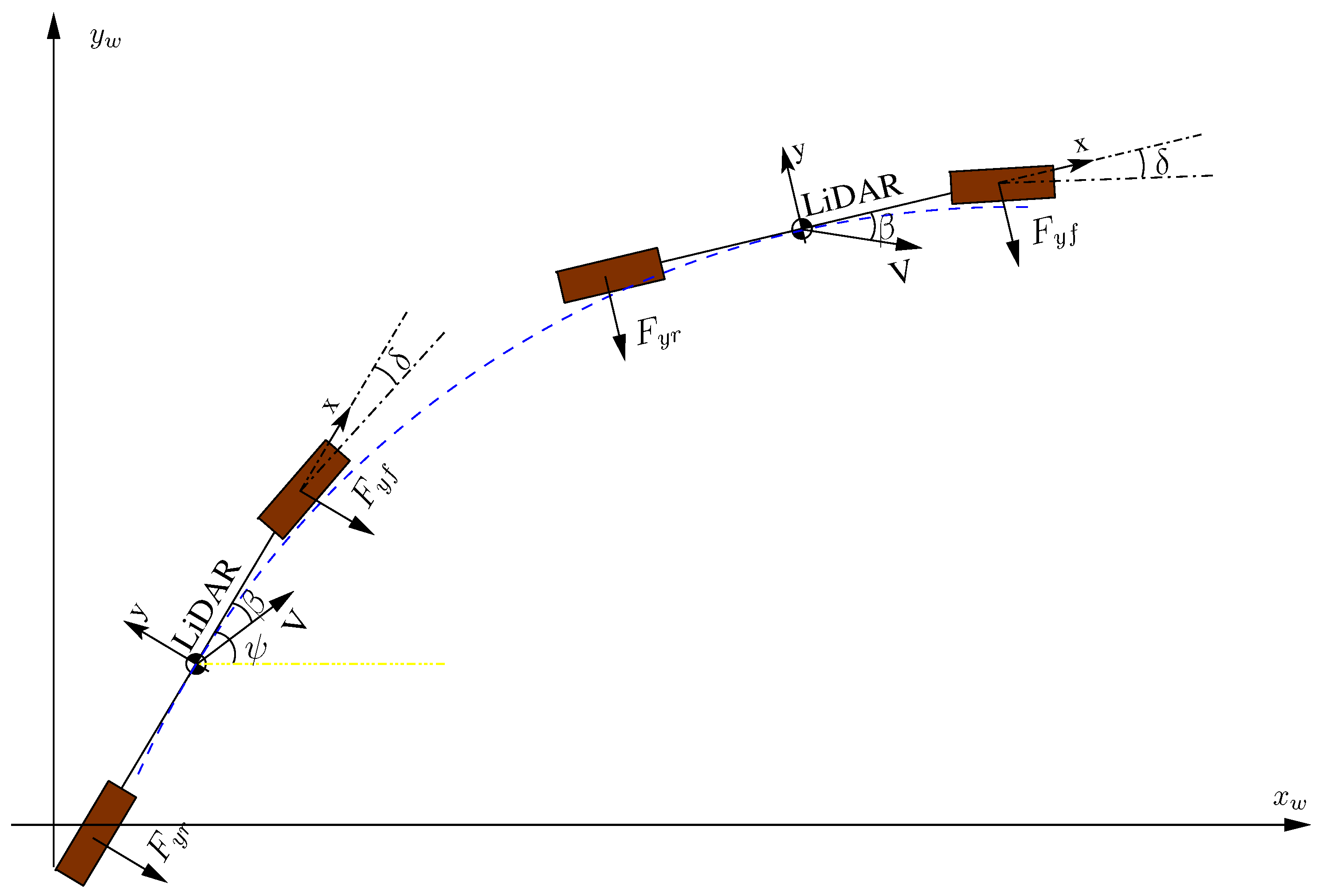
Filters usually leverage mathematical models to better approximate state transitions. In the field of vehicle modelling, there are two ways to study the movement of a vehicle: with kinematic or dynamic models. In the field of kinematic vehicle modelling, one of the most-used models is the bicycle model, due to its ease of understanding and simplicity. This model requires knowledge of the slide angle () as well as the front wheel angle () parameters. These variables are usually measured by dedicated car systems.
In this work, the variables
and
are not registered in the data set, so the paper proposes an approach based on a dynamic model to evaluate them. The method proposed can be used as a redundancy system, replacing dedicated car systems. The technique relies on the application of LiDAR odometry and the application of vehicle dynamics models where linear and angular forces are taken into account and the variables
and
are assessed during the car’s movement.
Figure 2 depicts the actuated forces in the x and y car axes, as well as the slip angle and the front-wheel angle. Given these variables, the bicycle model is applied to predict the car’s movement.
From a technical perspective, the variables
and
are evaluated using Equations (
1) and (
2). Equation (
1) represents Newton’s second law, applied on the car’s transverse axis in a linear form and on the car’s z-axis in an angular form.
where
m is the mass of the vehicle,
is the projection of the speed car vector
V on its longitudinal axis
x,
and
are the lateral forces produced on the front and rear wheel,
is the inertia moment of the vehicle concerning to the z-axis, and
and
are the distances from the centre of masses of the front and rear wheels, respectively.
The lateral forces
and
are, in turn, functions of characteristic tyre parameters, cornering stiffnesses
and
, the vehicle chassis configuration
and
, the linear and angular travel speed to which the vehicle is subjected to
, the slip angle
, and the turning angle of the front wheel
, as shown in Equation (
2):
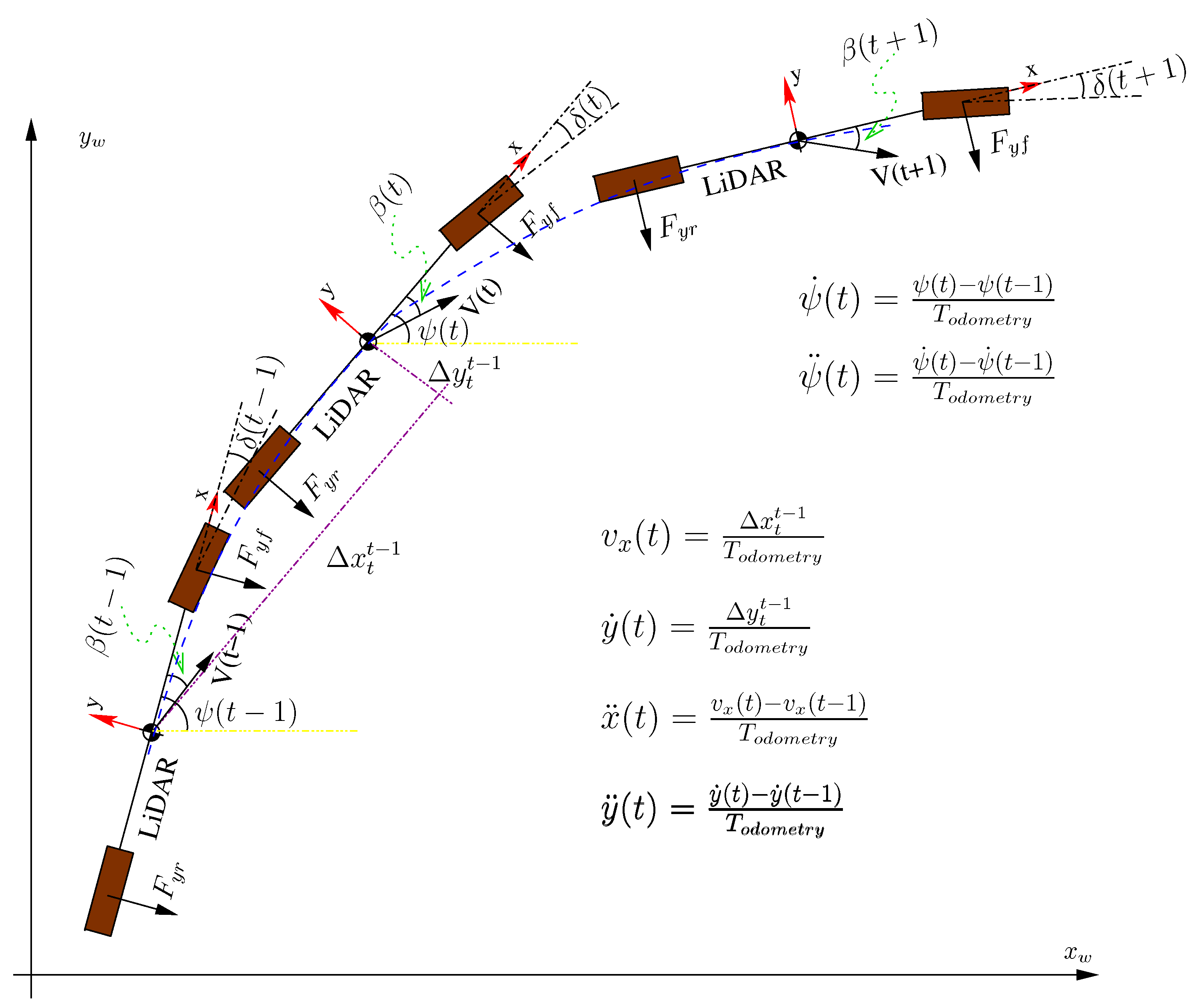
Therefore, knowing the above vehicle parameters and assessing the variables
, and
from the LiDAR odometry displacement, with the method proposed in this work (see
Figure 3), the variables
and
can be derived by solving the two-equation system shown in Equation (
1).
Finally, the variables
and
are used in the kinematic bicycle model defined by Equation (
3) to obtain the speeds
which, in turn, are used to output the predicted vehicle pose at time
.
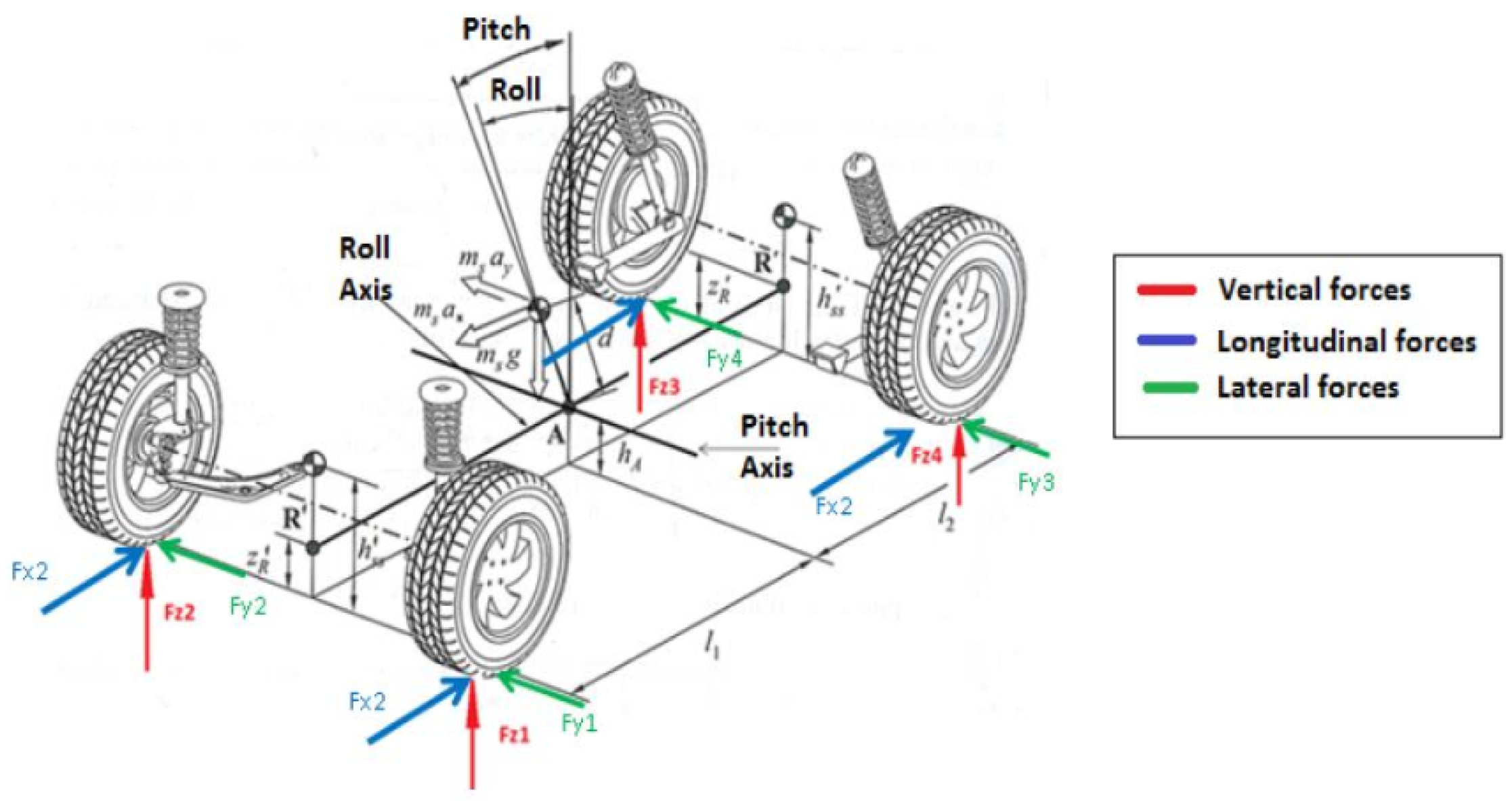
However, the model mentioned above evaluates the vehicle’s motion only in 3-DoF, while the LiDAR odometry gives us full 6-DoF displacement. Therefore, to assess the remaining 3-DoF, we propose to use another dynamic model based on the behaviour of the shock absorbers and the position of the vehicle’s mechanical pitch (
) and roll (
) axes; see
Figure 4. Appling this second dynamical model, we can predict the car’s movement in terms of its 6-DoF.
From a technical perspective, in order to evaluate these variables, we need to take into consideration the angular movement caused in the pitch and the roll axes.
First, regarding the pitch axis, the movement is due to the longitudinal acceleration suffered in the chassis, producing front and rear torsion on the springs and shock absorbers of the vehicle. Given the parameters
and
, which represent the distance between the centre of the pitch axis with respect to the centre of mass of the vehicle and the characteristics of the spring together with the shock absorber, respectively, Equation (
4) defines the dynamics of the pitch angle, which represents the sum of the moments of forces applied to the pitch axis. The angular acceleration suffered by the vehicle chassis for the pitch axis is obtained by Equation (
5), while the variables
,
, and
are found in the LiDAR odometry process.
where
With the pitch acceleration and applying Equation (
7), representing uniformly accelerated motion, the pitch of the vehicle can be predicted at time
.
On the other hand, the angular movement caused on the roll axis is due to the lateral acceleration or lateral dynamics suffered in the chassis. The parameter
is the distance between the roll axis centre and the centre of mass of the vehicle, and mainly depends on the geometry of the suspension. The lateral forces multiplied by the distance
generate an angular momentum, which is compensated for by the springs (
) and lateral shock absorbers of the vehicle (
), minimising the roll displacement suffered in the chassis. Equation (
8) defines the movement dynamics of the roll angle, which represents the movement compensation effect with the sum of moments of forces applied on the axle.
where
Given the roll acceleration and applying the uniformly accelerated motion Equation (
11), the roll of the vehicle can be predicted at time
:
Finally, to complete the 6-DoF model parameterisation, we need to consider the vertical displacement of the vehicle, which is related to the angular movements of pitch and roll. Equation (
12) represents the movement of the centre of masses concerning the vehicle z-axis, where
is the height of the vehicle’s centre of gravity at resting state:
Table 1 lists the parameters and values used in the 6-DoF model. The values correspond to a Volkswagen Passat B6, and were found in the associated technical specs.
To deal with the imperfections of the kinematic model, we compared the output of the proposed 6-DoF model with the ground truth available in the KITTI odometry data set. The analysis was applied to all available sequences, in order to measure the uncertainty model in the best way.
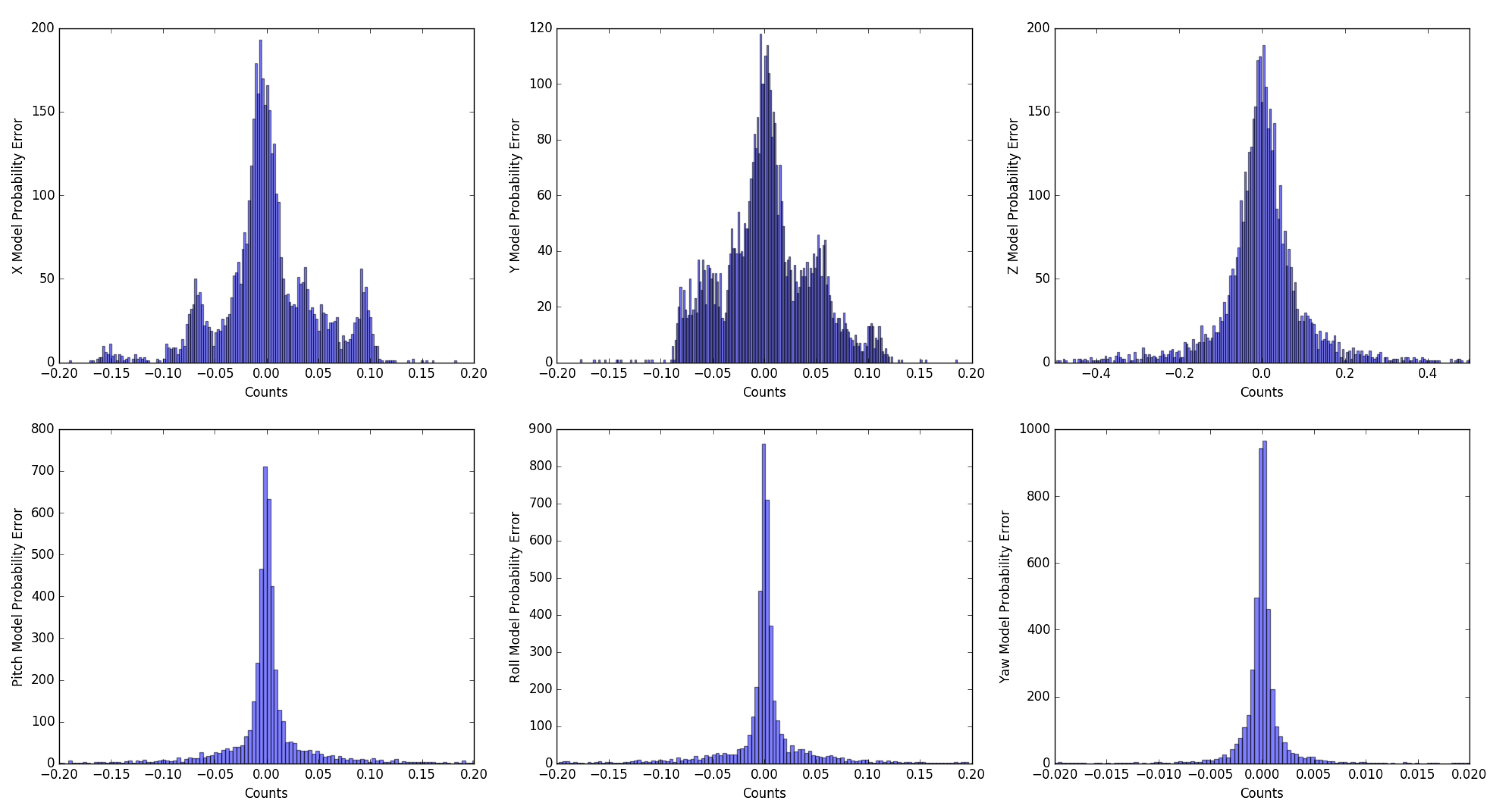
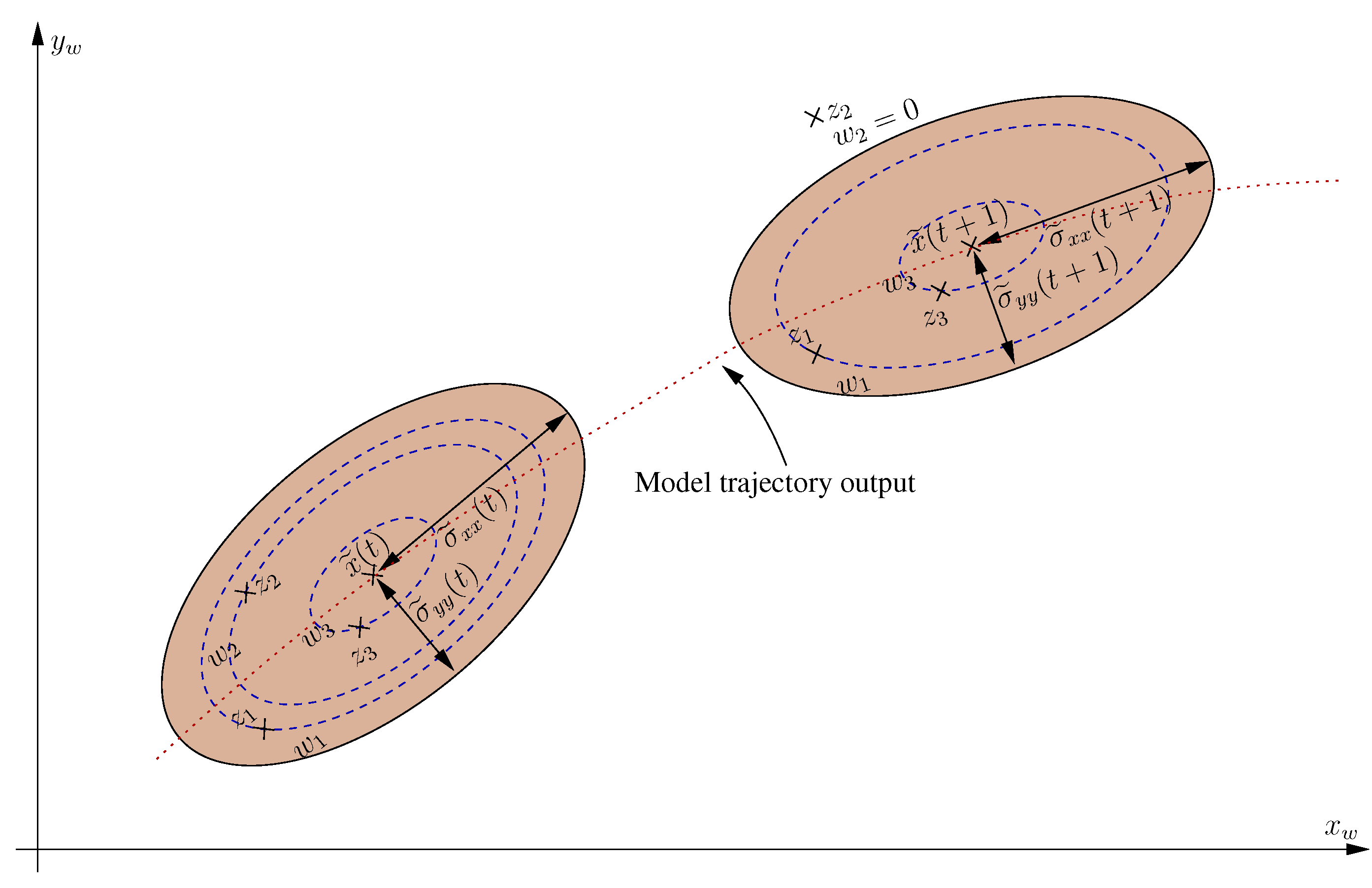
By evaluating the pose differences (see
Figure 5), the probability density function of the 6-DoF model was calculated, as well as the covariance matrix expressed in Equation (
13).
where
= 0.0485 m,
= 0.0435 m,
= 0.121 m,
= 0.1456 rad,
= 0.1456 rad,
= 0.0044 rad, and the error covariance between variables has a zero value.
4. Vehicle Pose Estimation System
This section details the architecture implemented to estimate the vehicle’s attitude, by integrating the dynamic and kinematic model described in
Section 3 and fusing the LiDAR-based measurement system described in
Section 5. Several works have analysed the response of two of the most well-known filters for non-linear models, the Extended Kalman Filter (EKF) and the Unscented Kalman Filter (UKF), where the results were generally in favour of the UKF. For instance, in [
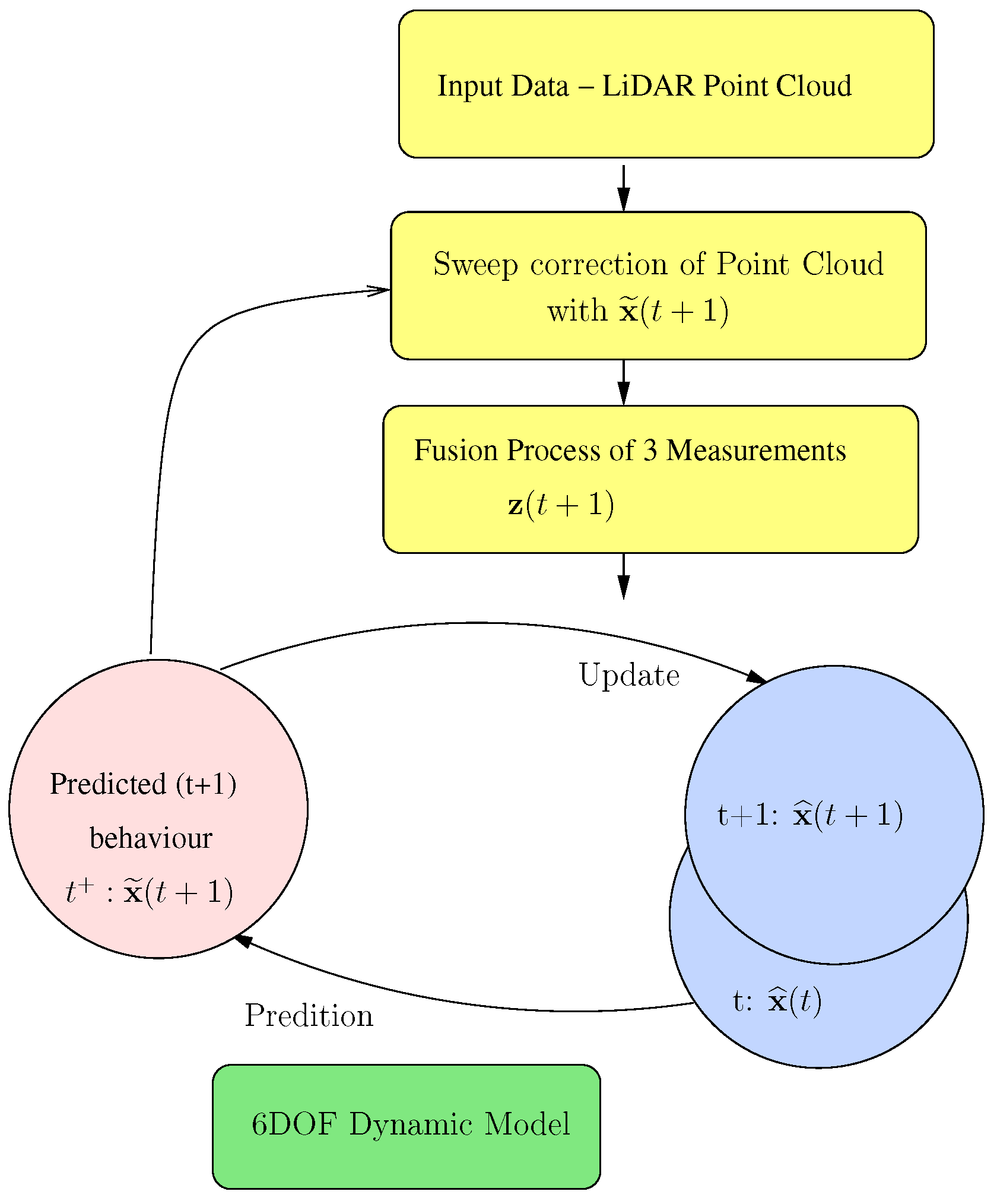
28], the behaviour of both filters was compared to estimate the position and orientation of a mobile robot. Real-life experiments showed that UKF has better results in terms of localisation accuracy and consistency of estimation. The proposed architecture therefore integrates an Unscented Kalman Filter [
29], which is divided into two stages: prediction and update (as shown in
Figure 6).
The prediction phase manages the 6-DoF dynamic model described in the previous section to predict the system’s state at time
. Along with the definition of the model, the model noise covariance matrix
Q must be associated, as defined by the standard deviations evaluated above. The model noise covariance matrix is only defined in its main diagonal and is constant over time. Equation (
14) represents the prediction phase of the filter.
where
is the 6-DoF state vector, as shown in Equation (
15), and
A matrix represents the developed dynamic model.
In the filter update phase, the LiDAR odometry output is estimated. The estimated state vector,
, is represented, in terms of the state variables, by Equation (
16). The 6 × 6 matrix
C is defined with the identity matrix, as the vectors
and
contain the same measurement units. Finally, the matrix
R is the covariance error matrix of the measurement, which is updated every odometry period in the measurement and fusion process, as explained in
Section 5. The matrix
R is only defined in its main diagonal, representing the uncertainty of each of the magnitudes measured in the process.
LiDAR Sweep Correction
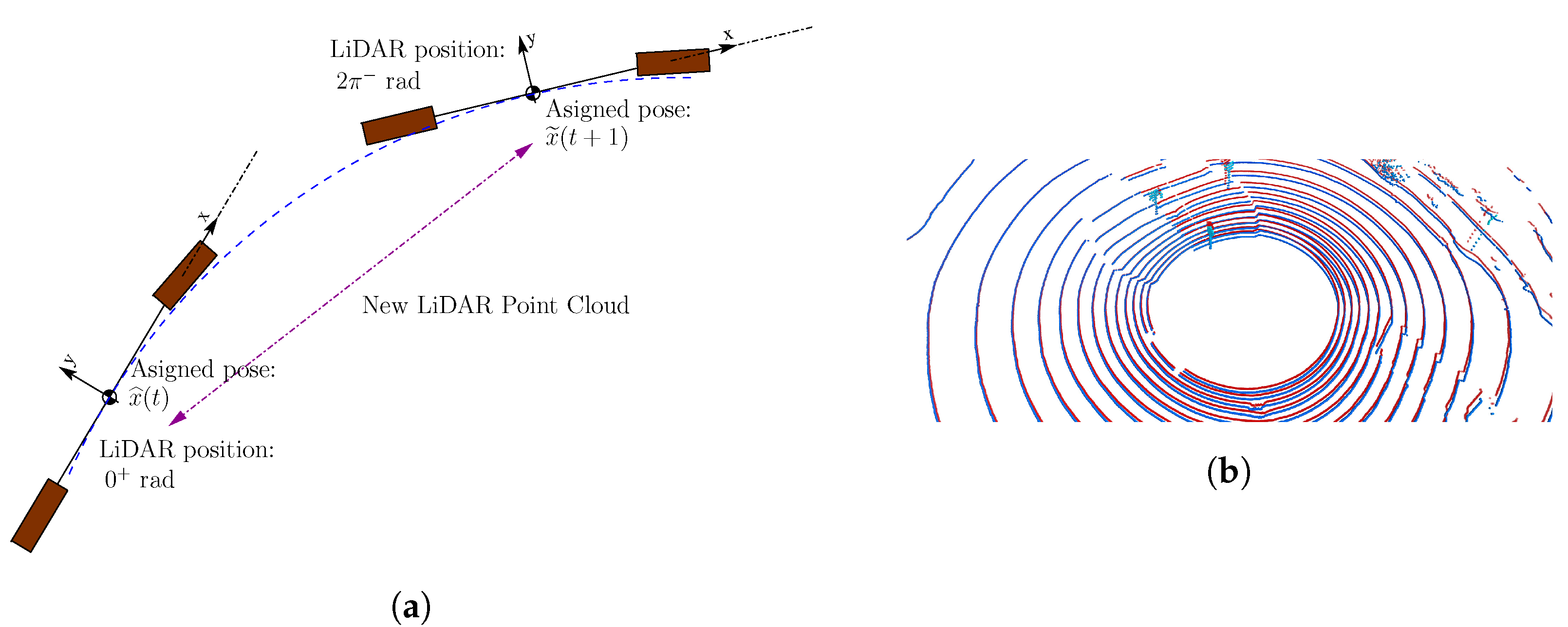
To use the LiDAR data in the update phase of the UKF, it is recommended to perform a so-called sweep correction of the raw data. The sweep correction phase is due to the nature of most LiDAR devices, which are composed of a series of laser emitters mounted on a spinning head (e.g., the Velodyne HDL-64E). The sweep correction process becomes crucial when the sensor is mounted on a moving vehicle, as the sensor spin requires a time span close to approximately 100 ms, as in the case of the Velodyne HDL-64E. The sweep correction process consists of assigning two poses for each sensor output and interpolates the poses with constant angular speed for all the LiDAR beams. These poses are commonly associated with the beginning and the end of the sweep. Thus, the initial pose is equal to the last filter estimation
and the final pose is equal to the filter prediction
to carry out the interpolation. The whole point cloud is corrected with the interpolated poses evaluated, solving the scene deformation issue when the LiDAR sensor is mounted on a moving platform.
Figure 7a shows the key points on the sweep correction process.
Regarding the correction method, the authors in [
30,
31] proposed a point cloud correction procedure based on GPS data. The process requires synchronisation between each GPS and LiDAR output, a complex task when the GPS introduces small delays in its measurement. For this reason, in our case, the GPS data is replaced with the filter prediction to apply the sweep correction process.
Figure 7b shows the same point cloud with and without sweep correction, captured in a roundabout with low angular speed vehicle movement. It can be seen that there is significant distortion concerning reality, as the difference of shapes between clouds is substantial, leading to errors of one meter in many of the scene elements. We can claim that the motion model accuracy is a determinant for the sweep correction process, as it improves the odometry results (as we depict in
Section 7).
6. Fail-Aware Odometry System
The estimated time window evaluated by the fail-aware indicator is recalculated for each instant of time, allowing the trajectory planner system to manage an emergency manoeuvre in the best way. In practice, most odometry systems do not implement this kind of indicator. Instead, our approach proposes the use of the evaluated heading error, as the heading error magnitude is critical for the localisation error. Thus, a small heading error at time t produces a huge localisation error at time if the vehicle has moved hundreds of meters away. For example, a heading error equal to rad at t introduces a localisation error of 0.01 cm at if the vehicle moves only 100 m. This behaviour motivates us to use the heading error to develop the fail-aware indicator.
The estimated heading error has a significant dependence on the localisation accuracy. The developed fail-aware algorithm is composed of two parts: a function to evaluate the fail-aware indicator and a failure threshold, which is fixed as
. This threshold value was chosen by using heuristic rules and analysing the system behaviour in sequences 00 and 03 of the KITTI odometry data set. We evaluated the fail-aware indicator (
) on each odometry execution period, in order to estimate the remaining time to overtake the fixed malfunction threshold. Equation (
24) defines the fail-aware indicator, where
is the estimated heading standard deviation and
is identified as the variable most correlated with the localisation error; once again, regarding the error results in sequences 00 and 03.
For this reason, is useful to evaluate the fail-aware indicator. The second derivative of is used, representing the heading error acceleration, so how fast or slow this magnitude changes is used as a determinant to find the estimated time of reaching the malfunction threshold. If the acceleration of is low, the estimated time window is large and the trajectory planner has more time to perform an emergency manoeuvre. On the other hand, if the acceleration of is high, the estimated time window be decisive with respect to stopping the car safely in a short time.
The acceleration of
can be positive or negative, but the main idea is to accumulate the absolute value for all the odometry interactions, in order to have an indicator that allows us to know the estimated time window. The limit time
in the addition term represents when the LiDAR odometry system starts to work as a redundant system for localisation tasks. In this way, the speed
is calculated as the difference between two consecutive
values, in order to assess the time to reach the malfunction threshold.
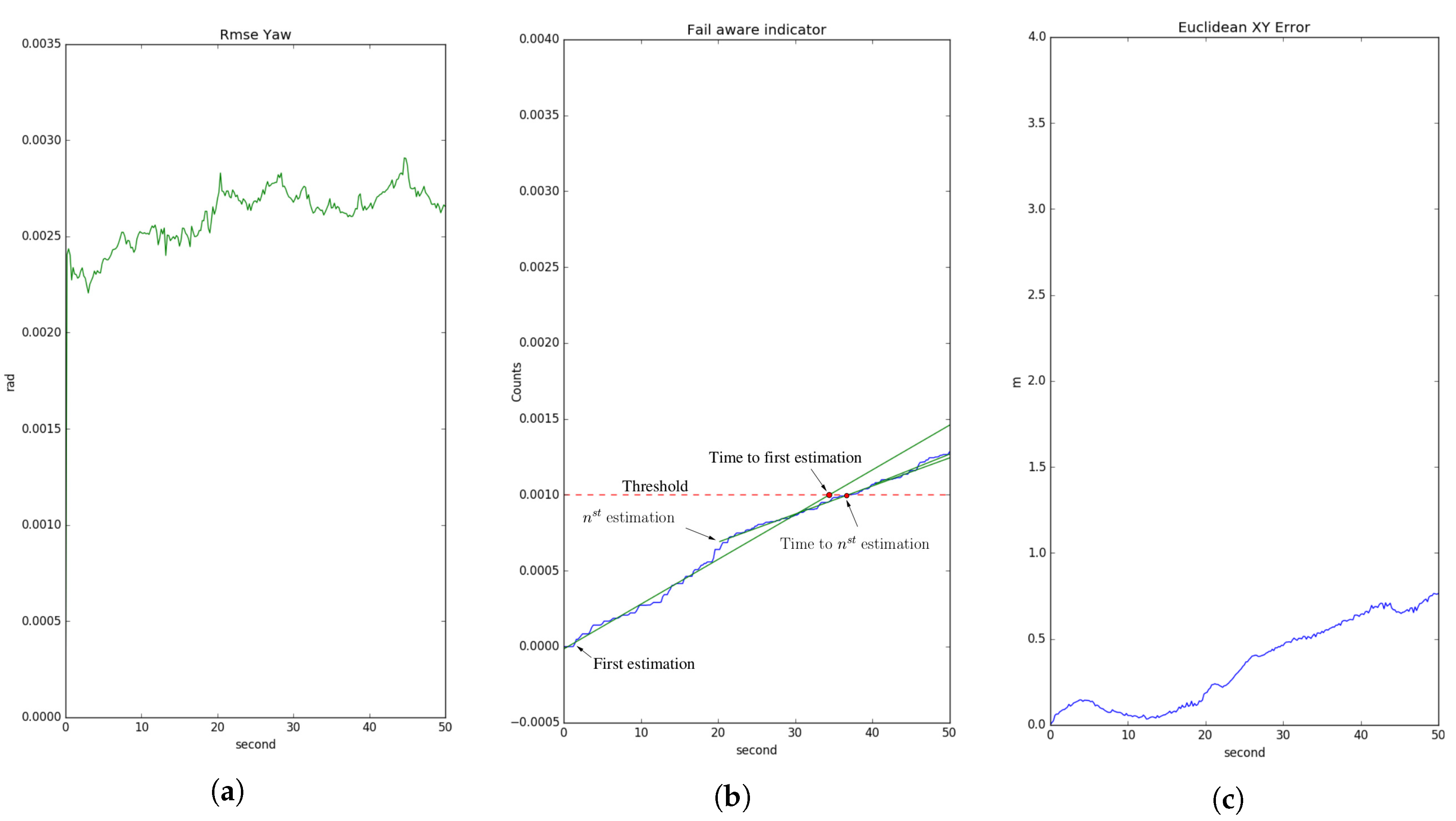
Figure 18 shows the behaviour of the fail-aware algorithm. In all the use-case studies, the Euclidean error
is approximated as 0.6 m when the malfunction threshold is exceeded. The Euclidean XY error depicted in the image is calculated by comparing the LiDAR localisation and the available GT. The fail-aware algorithm provides a continuous diagnostic value of the LiDAR system, allowing for the development of more robust and safe autonomous vehicles.
8. Conclusions and Future Works
Although research and development into autonomous driving in recent decades has helped to achieve high SAE levels of automation, the presently existing control architectures are highly driver-dependent. Indeed, in the case of hardware failure, the driver must take control of the vehicle. However, to improve user acceptance of these systems, the vehicle itself should be able to solve the problem autonomously. This paper presents a LiDAR odometry system with an integrated fail-aware feature, which notifies high-level systems with the actual performance of our proposal. For instance, this allows a trajectory planner to plan a safe stop manoeuvre, guaranteeing the needed security in the environment.
In this paper, we presented a robust and scalable localisation system which, independently of the support or redundancy that it can offer to other systems, allows for fusion with any of the available localisation measures, improving its robustness in the measure. Thus, the fusion architecture presented reduces the undesirable consequences given in urban scenarios where the D-GPS measure may suffer from loss of accuracy due to satellite visibility.
Our proposal is based on a LiDAR-based odometry algorithm. An in-depth study of the topic was presented and it was pointed out that all existing odometry systems suffer from drift error in their process. To minimize and possibly eliminate this issue, the proposed system fuses different LiDAR-based localisation measurements using a UKF filter. The filter implementation takes into account 6-DoF dynamic models, which improve the correction process of the point cloud sweep, correcting the deformation of the scene when it is captured from a moving platform with high angular velocities. The model also allows us to estimate the vehicle roll and pitch variables, in order to reduce the measurement noise.
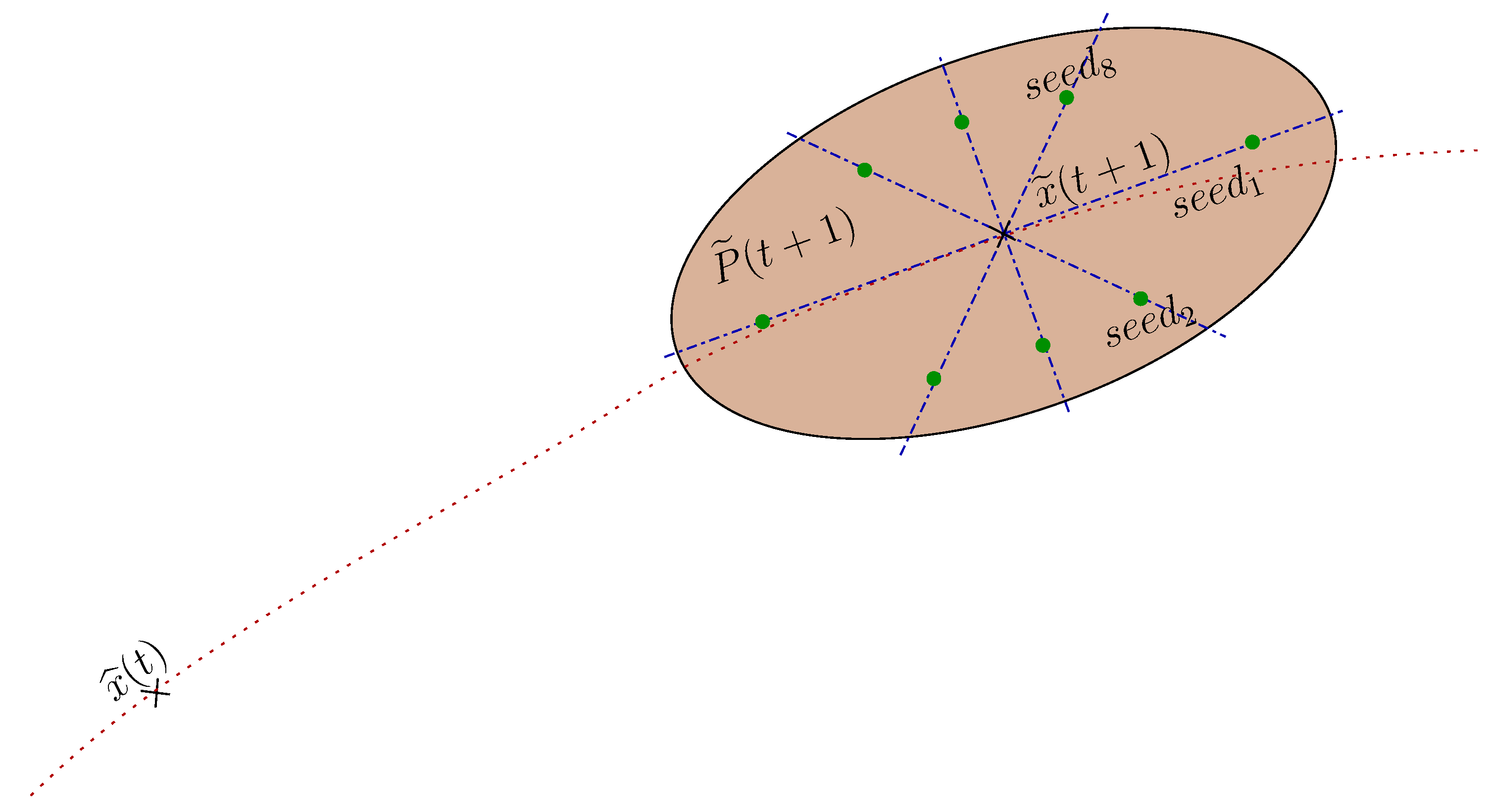
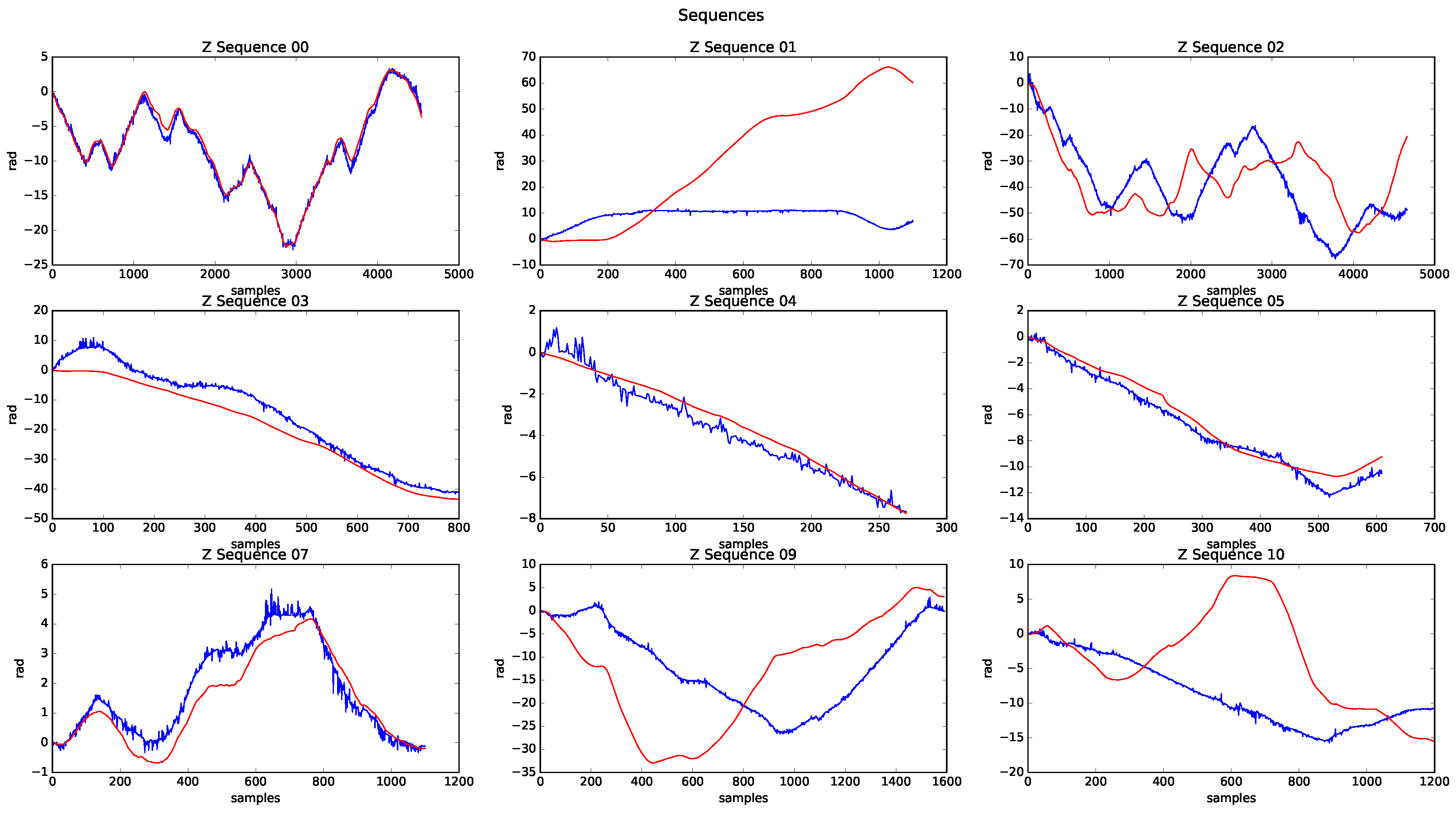
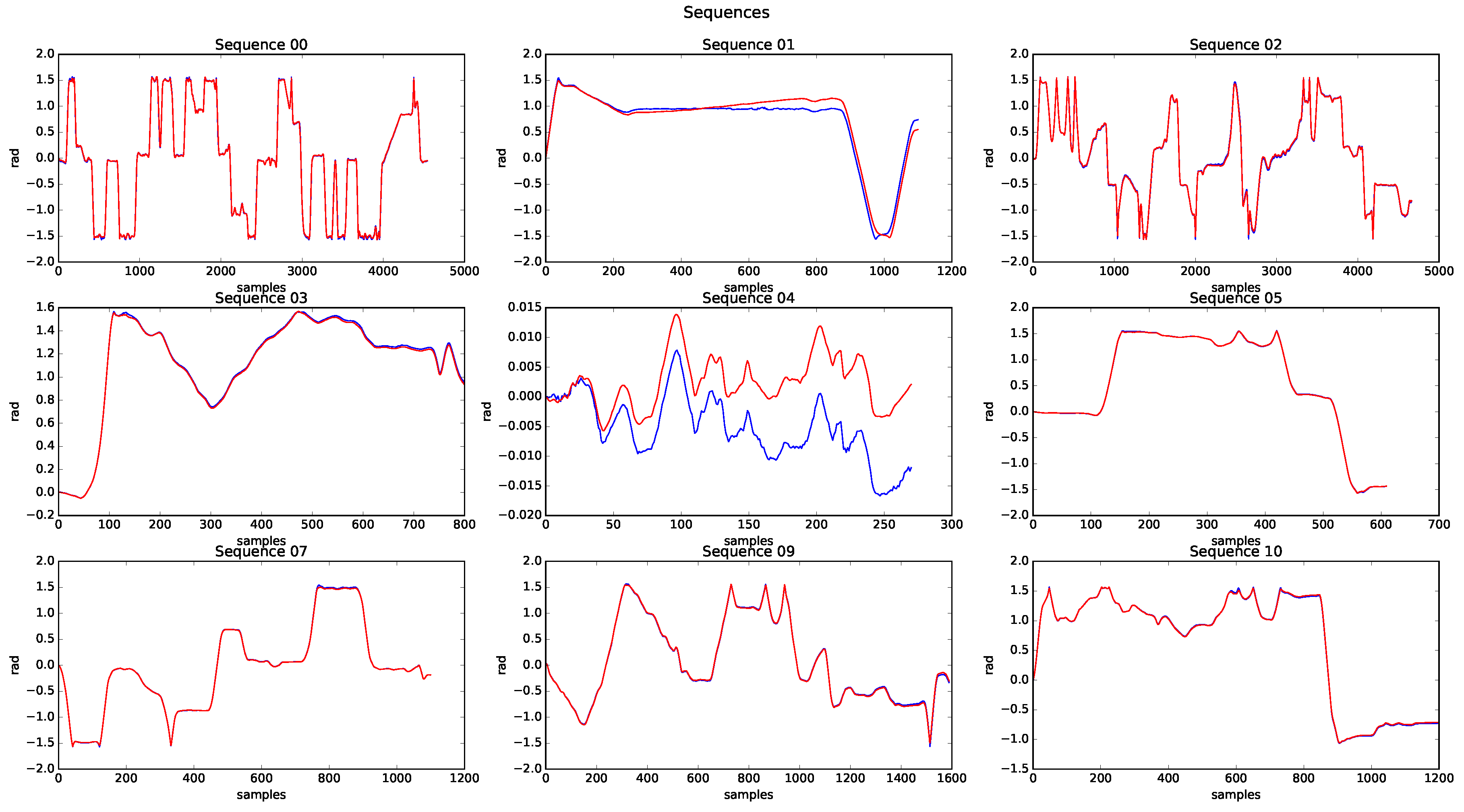
ICP techniques have been widely applied in LiDAR odometry systems, but these techniques have the disadvantage of being slow, despite their high precision. Therefore, the presented approach integrates multiple measurement stages to improve the accuracy of the final measurement. The first stage is based on multiple ICPs of lesser precision but with starting seeds distributed to improve its precision in the final measurement. The second stage is based on applying constraints to the ICP minimisation process, improving the accuracy and the computation time. Finally, the third stage is focused on the detection of vertical corner features above the point clouds, in order to apply SVD and estimate the homogenous transform between point clouds. However, the results of the third stage are conditioned to the type of scene, as shown in the highway results of Sequence 01.
The obtained linear and angular errors when processing the KITTI odometry data set were and 0.0039 deg/m, respectively. These results are ranked within the first fifteen methods based only on LiDAR odometry. Furthermore, the proposed algorithm introduces a dynamic fail-aware indicator, a function of the standard error deviation associated with the estimation of the yaw vehicle angle.
As this work presents a fail-aware system based on LiDAR odometry, it could assist other systems of the vehicle (which is part of our planned future work) to decrease the linear and angular errors associated with localisation. For this purpose, a new localisation measure based on semantic segmentation and machine learning techniques should be added. On the other hand, building high-definition 3D maps is a booming topic, which may solve many of the problems that autonomous driving is prone to at present. Therefore, integrating a global D-GPS measurement into the developed system may eliminate the drift, allowing us to build high-definition 3D maps.

 ,
, 































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}