1. Introduction
Instrument Transformers (ITs) are essential actors for the current and future power networks. They allow the monitoring and measurement of the electrical quantities, providing sufficient information for the grid management and control. The main standard that regulates them is the IEC 61,869 series, in which the IEC 61869-1 [
1] and -6 [
2] describe the general requirements for legacy inductive ITs and the more recent Low-Power Instrument Transformers (LPITs), respectively. The other documents of the series deal with specific requirements of each type of transformer (current and voltage ITs in IEC 61869-2 and -3, respectively [
3,
4], passive current and voltage LPITs in IEC 61869-10 and -11, respectively [
5,
6]), while there are no documents for the Electronic Instrument Transformers (EITs) yet. In fact, the EITs still rely on the old Standard series 60044-7 and -8 [
7,
8].
To this purpose, the paper aimed at contributing to the scientific world with an analysis of some peculiar aspects that affect EIT accuracy, which are worthy of standardization.
As a matter of fact, the accuracy evaluation is a critical task for all kind of electrical assets. For example, a new way of expressing uncertainty in voltage transformers (VTs) was presented by the authors of [
9], while characterization and compensation techniques for their evaluation were presented by the authors of [
10,
11,
12] (when the VT was working under non-sinusoidal condition in [
10] and in a wide frequency range in [
11]). An equivalent effort has been dedicated to current transformers (CTs) by the authors of [
13,
14,
15,
16,
17,
18]. In [
13,
17], for example, the authors developed new compensating techniques, while novel procedures have been developed by the authors of [
14,
15,
16]. Even digital output ITs were well tackled by the literature [
19,
20]. Finally, an onsite calibration system and method were proposed by the authors of [
21,
22,
23] for EITs, respectively, whereas their accuracy vs. harmonics was studied by the authors of [
24].
However, even if the paper deals with ITs, the accuracy is an extremely important aspect for a variety of devices: cable-joints [
25,
26], induction motors [
27], energy meters [
28], electric vehicles [
29], etc. This fact is mainly due to the use of the information gathered from the field, which should be reliable enough to manage and control the grid [
30,
31,
32,
33,
34,
35]. For example, the authors of [
30,
31,
32,
33] tackled the influence of the measurements to smart grid applications and network control, whereas the authors of [
34,
35] used reliable measurement collected from the ITs to run algorithms that allowed a fine control of the network.
To conclude the overview on the accuracy, it is worth mentioning that it may be affected by several influence quantities, hence, in the last years, several manuscripts have dealt with this issue. For example, accuracy vs. temperature has been discussed for EITs, CTs, and VTs by the authors of [
36,
37,
38], respectively. Electromagnetic compatibility is another issue that affect ITs, and it has been studied by the authors of [
39,
40] for EITs, and VTs, respectively.
In light of the above, accuracy is the main pillar of this work. In particular, while waiting for the updated standard for EITs, what follows deals with sources of disturbances that affect the root mean square (rms), and hence the ratio error, of the quantities measured by an EITs. Such sources of disturbances, for EITs, are mainly noise and offset. Therefore, a mathematical approach was applied to find an expression that may include and quantify them in the overall accuracy evaluation of EITs. Afterward, several numerical examples were performed by implementing in the equation the limits provided by the standards to understand the weight and influence of noise and offset to the overall ratio error. Finally, dedicated comments (in light of typical datasheets taken from typical off-the-shelf devices) were given to improve and suggest ways of evaluating the uncertainty of EITs.
The remainder of the manuscript was structured as follows.
Section 2 contains the detailed motivation and goals of the work. An overview of the standards was presented in
Section 3 to highlight the focus of the manuscript. In
Section 4, the mathematical approach to deal with the EITs uncertainty was presented, whereas in
Section 5, all the numerical examples were presented together with the final comments. Last,
Section 6 summarizes and concludes the overall manuscript.
2. Motivation and Goals
With the spread of new ITs like the LPITs, both active and passive, the need to regulate all possible aspects related to their operation increases daily. Therefore, this paper aimed to raise and deal with sources of signal distortion, introduced by the sensor itself, that may affect the rms, and hence the accuracy, of the EITs. Consequently, in the core of the text, some assumptions used to clarify that the disturbances coming from the input signal and not from the device itself were omitted and out of the scope of the work. Afterward, after an analysis of the current related standards, a general expression was obtained, evaluated, and discussed, considering two peculiar disturbances that affects the EIT: The offset and the noise.
There are two main reasons that constitute the backbone of the research. First, the EITs introduced a huge set of issues that did not affect the legacy inductive its. Second, not all of the instrumentation, adopted by the final users to acquire the measurements from the ITs, implement signal analysis techniques that extrapolate only the significant components (e.g., the DFT to extract a 50 Hz or any other component of interest for a specific application). This second aspect is critical because the “manufacturers’ secrets,” or, in other words, the technologies implemented for each task, are not public, hence it is very difficult to state that a particular task is performed by everyone in the same way. Furthermore, the solving of the issues related to EITs accuracy cannot be demanded by a third party but it should be tackled by specific standards. This aspect is critical to avoid the spread of custom solutions that go in the opposite direction of a harmonized EITs scenario.
3. Standards Overview
This section is dedicated to the understanding and review of what is currently prescribed by the standards related to ITs.
As previously mentioned, the standard of interest is the IEC 61869-6 [
1], which provides the general requirements for the LPITs and replaces part of the old IEC 60044-7 and -8. In fact, the following documents of the series IEC 61869-10 and -11 [
5,
6] are dedicated to Low-Power Current Transformers (LPCTs) and Low-Power Voltage Transformers (LPVTs), respectively, while the documents related to EITs (IEC 61869-7 and -8) are currently being written by the Technical Committee TC-38.
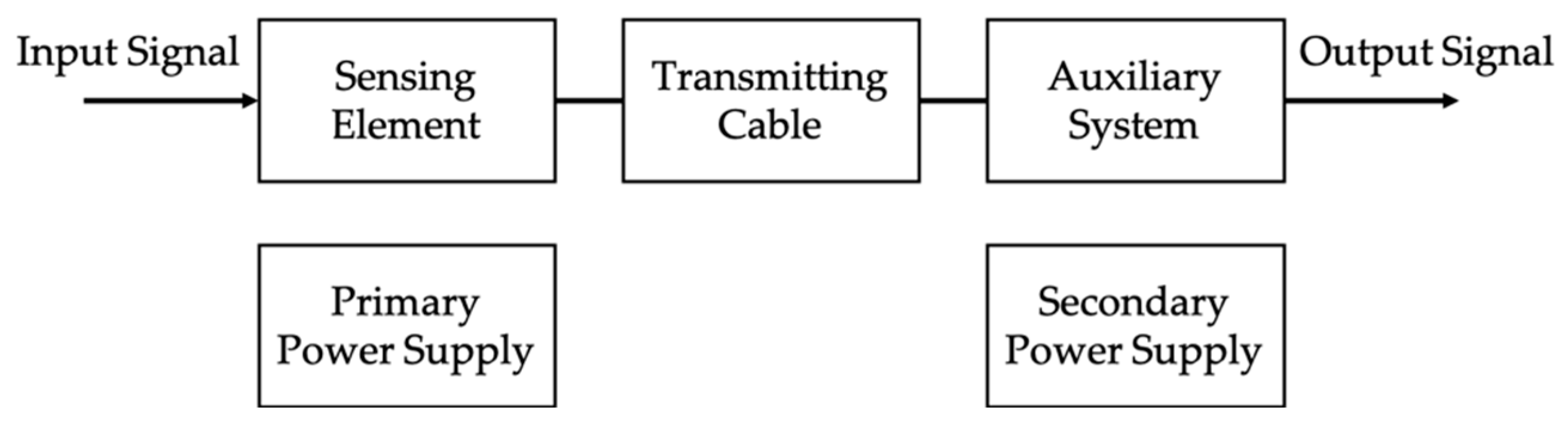
Standard [
2] is valid for both active and passive LPITs, which have a generic block diagram like the one depicted in
Figure 1 (taken from [
2]). From the picture, it is clear that the output signal, either analog or digital, is not manipulated by any digital processing technique.
Furthermore, the output signal is defined as:
where
is the fundamental frequency,
the time variable, and
is the secondary phase.
is the secondary direct signal, and
the secondary residual signal including harmonic and subharmonic components. Finally,
is the rms value of the secondary converter output when both
and
are equal to zero.
Note that (1) is valid for analog signals and for digital ones when
is replaced with
(samples variable). Furthermore, it is clear from (1) that the output signal of an LPIT may include sources of distortions, which alter the pure sinusoidal signal, like the direct component, harmonic, and subharmonic content. This latter aspect becomes interesting when looking at the definition of the ratio error
in (2):
where
is the rated transformation ratio and
is the rms of the fundamental component of the input signal. Hence, by adopting
, it follows that the secondary term used to compute
only consists of a fundamental component, cleaned from all kind of disturbances, either introduced by the sensor or by the primary signal.
Any indication of which should be the limits for direct component (
) and for the signal-to-noise ratio (SNR) is missing from Reference [
2]. As for the latter disturbance, the authors of [
2] only specified that the SNR should be provided by the manufacturers in the datasheets of the devices. Furthermore, no indication on how and if such disturbance components may affect the accuracy the LPITs was given. In fact, the direct component and the noise directly affected the rms value of the measured quantity, hence they affected all quantities that were computed starting from a rms information (for example the apparent power).
Overall, the general comment is that a document like [
2], which provided requirements for all kind of LPITs, should contain the abovementioned information. In support to this statement, Reference [
2] also covered EITs and, as active devices, was more likely to introduce issues like noise and direct components superimposed to their output signal. Furthermore, Reference [
2] did not provide a real evaluation of the LPITs’ accuracy, even in the ideal sinusoidal condition. In fact, from how
was defined, its computation used only “cleaned” parameters which did not consider any disturbances that could be introduced by the sensor itself. This may lead, as detailed in what follows, to an underestimation of the uncertainty, especially when the input quantity is rather lower than the rated value.
4. Proposed Approach
To deal with the issue presented in the previous section, the authors started from the rms and ratio error expressions to obtain a compact relation that links the accuracy of an LPIT to the signal disturbances, caused by the sensors, that affect the rms quantities.
Let us start from the definition of the rms value of a generic quantity
at the output of an LPIT:
which has been written highlighting four main terms: The direct
, the rated value at fundamental frequency
, the one that summarize noise
, and all other components included in the signal, summarized with
. From here on out, the term
was neglected, assuming that the primary signal did not include any harmonic, subharmonic, etc., and that the device under test was linear. Hence, all possible sources of disturbance were limited to offset and direct components and attributed to the sensor. Such an assumption is fundamental to focus on the offset and noise introduced by the EITs. Moreover, from a numerical point of view, the effect of nonlinearity is usually much lower than those of the considered disturbances. Therefore, (3) can be written has:
if the direct and the noise components are merged into
.
Afterwards, it is worth defining the ratio
between those two sources of distortion and the fundamental signal at rated value, assuming, as it is usually done, that
is independent of the input signal:
Hence, after some basic manipulation, (4) becomes:
where (6) holds for measurements performed at the rated value
. To generalize (6), for whatever input quantity value, the variable
is defined as:
where
represents a factor that scales the rated value to the selected testing value (
p typically ranges between 0.01 and 2). This means that
is the rms value of a sinusoidal component at rated frequency.
Hence, (4) can be written as:
which leads to find the ratio between the measured value
and the “real” one
:
The quantity
represents the contribution of the direct current (offset) and the noise components to the measured quantity. In other words, it expresses a ratio that highlights the effect of the nonlinearities introduced by the sensor. A relation similar to (9) can be obtained from the definition of
in (2):
which reflects the ratio between the primary and secondary quantity (with the former scaled to the primary side).
At this point, if (9) and (10) are merged, the relative value
obtained from a specific
is:
In other words, (11) is the expression that assumes that the
of a LPIT is all due to the contribution of noise and direct components, represented by
(hence, the LPIT is working in ideal conditions except for those two contributions). To obtain
in absolute value, it is sufficient to multiply it for
. Of course, as written in
Section 3, the current standards do not take into account offset and noise in the evaluation of the ratio error but, in actual conditions, the above nonidealities lead the rms of the LPIT output to differ from the one obtained from ideal and rated conditions, thus turning into a “ratio error.”
The final step of the mathematical development consists of improving (11) to make it significant in practical applications. In fact, in its current form, it assumes that
is all due to noise and direct components. Therefore, it is reasonable to introduce a coefficient
that specifies a portion of
that may be caused by those two sources of disturbances. The use of a coefficient like
is already a common practice by the authors of [
6] where, for example, the test vs. electric field is valid when
varies no more than
between the test with and without the presence of electric field.
Consequently, (11) can be rewritten as:
to include the
coefficient. From the authors experience, it is possible to state that a range of values that may be attributed to
is 3–5. In other words, with (12), it is possible to compute the maximum value of
that makes its effect almost negligible with respect to the ratio error allowed by the accuracy class of a given LPIT.
6. Conclusions
This paper aimed to raise a particular issue affecting electronic instrument transformers. In fact, considering their working principle, they are more affected by sources of disturbance than other instrument transformers. Such disturbances act on the rms quantities, and hence the ratio error, measured by the transformers.
Therefore, considering that proper standards do not deal with such issues yet, the paper presented a mathematical expression which emphasized the contribution of noise and direct components to the overall ratio error index. Afterwards the expression was applied on practical numerical examples for evaluation, on absolute terms, which limits the manufacturers need to comply.
The results showed that the limits obtained with the rigorous mathematical expression were, in most cases, severe. To prove that, such limits were compared with those gathered from typical off-the-shelf devices (both current and voltage transformers). The comparison clearly confirmed that commercial electronic current transformers have more difficulties in meeting the limits than the voltage counterparts. In particular, only expensive equipment is capable of fulfilling the fixed limits.
Therefore, the authors believe that there is a strong need for standardization in this field, due to the significant relevance of the source of disturbance on the overall accuracy of an electronic instrument transformer.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}