Characterisation of GNSS Carrier Phase Data on a Moving Zero-Baseline in Urban and Aerial Navigation


Abstract
1. Introduction
2. Experiment Description
2.1. Terrestrial Experiment
2.1.1. Measurement Configuration
2.1.2. Test Drive Details
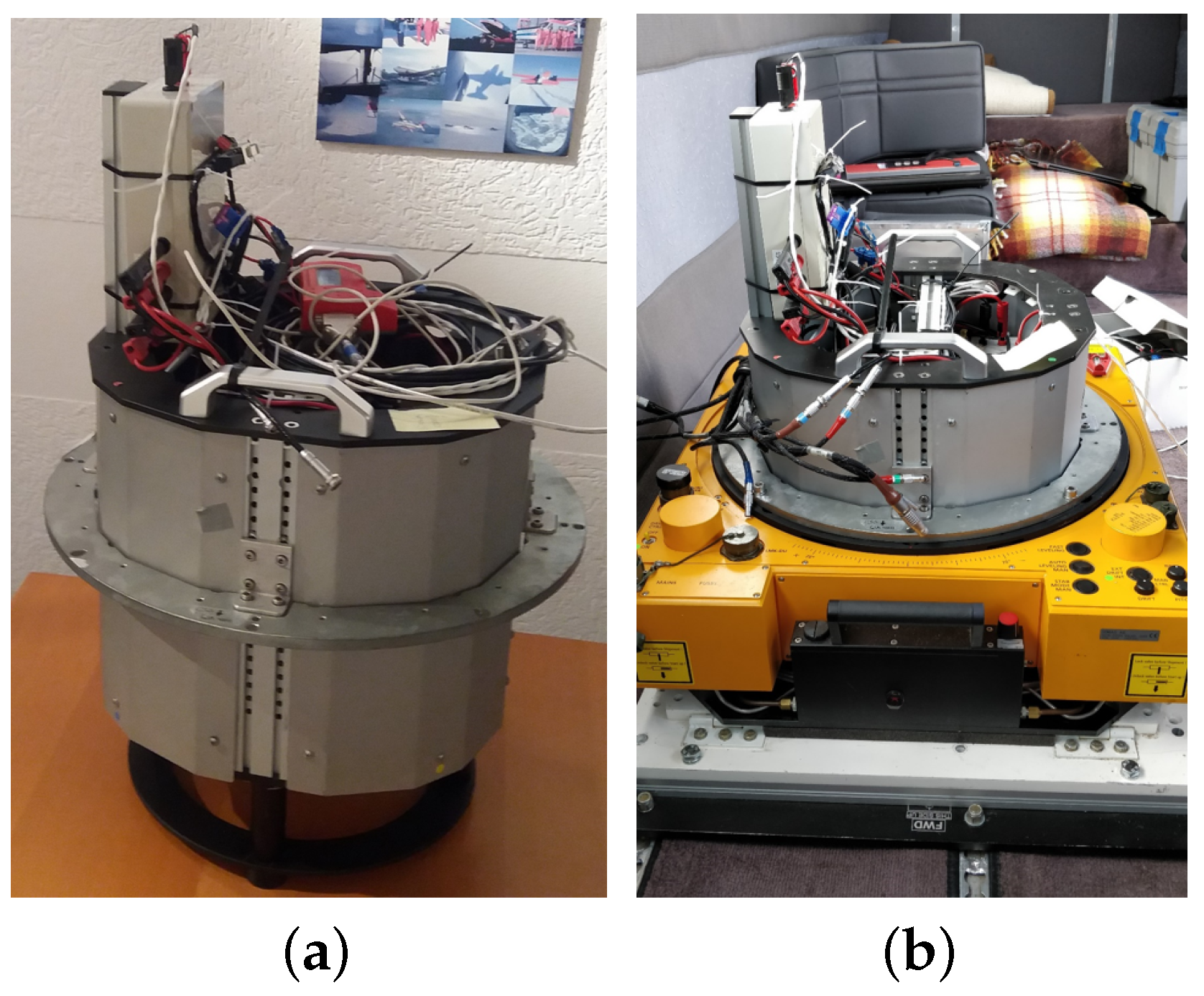
2.2. Aerial Experiment
2.2.1. Measurement Setup
2.2.2. Flight Test Details
2.3. Pre-Processing of the GNSS Data-Sets
3. Double Difference Observation Modelling
3.1. Double Difference Principle
3.2. Time Synchronisation
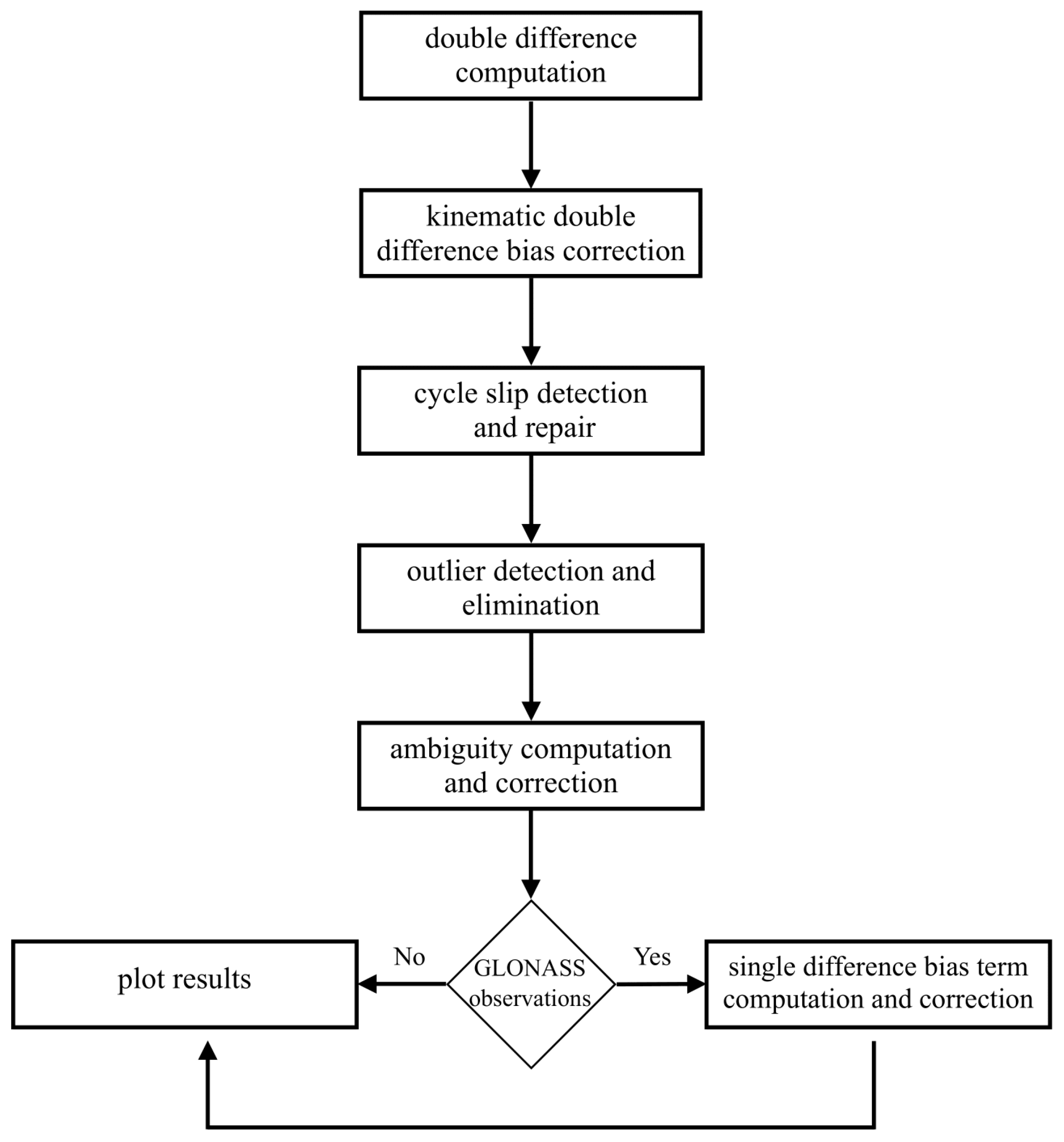
3.3. DD Computation Algorithm
4. Results Analysis
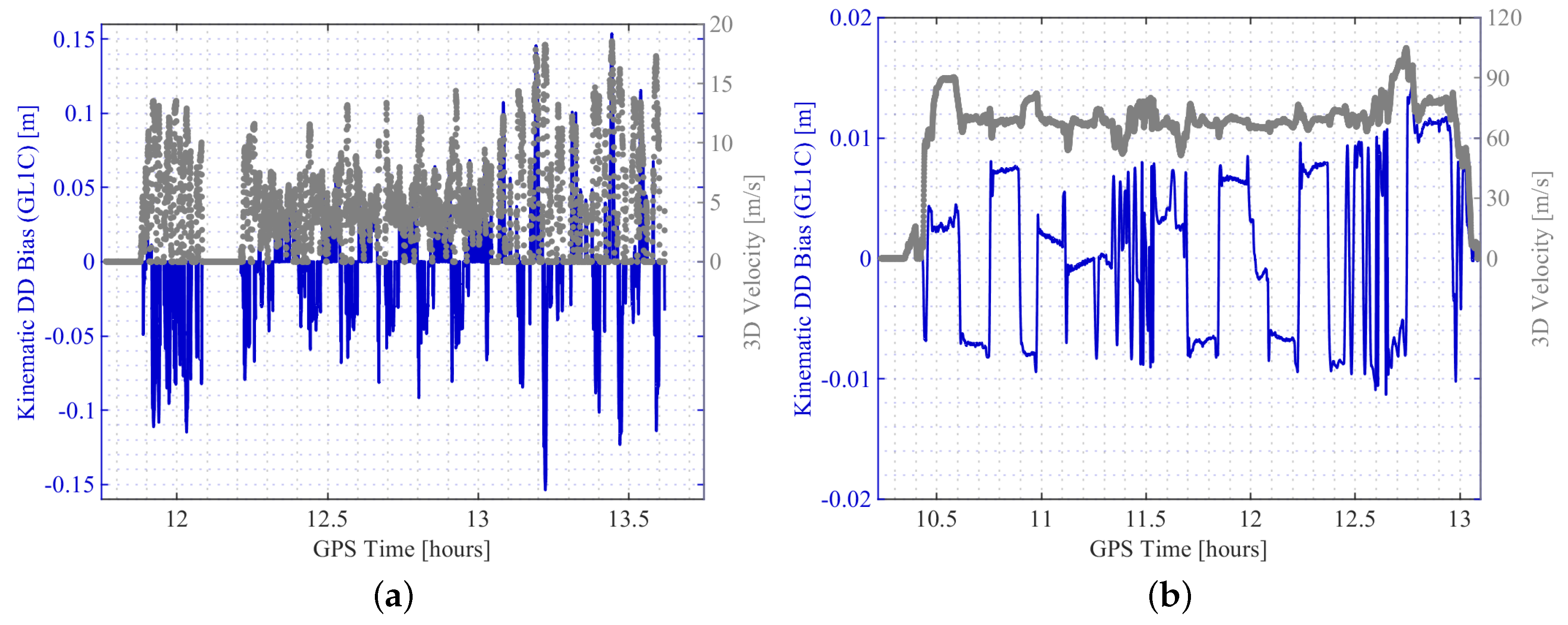
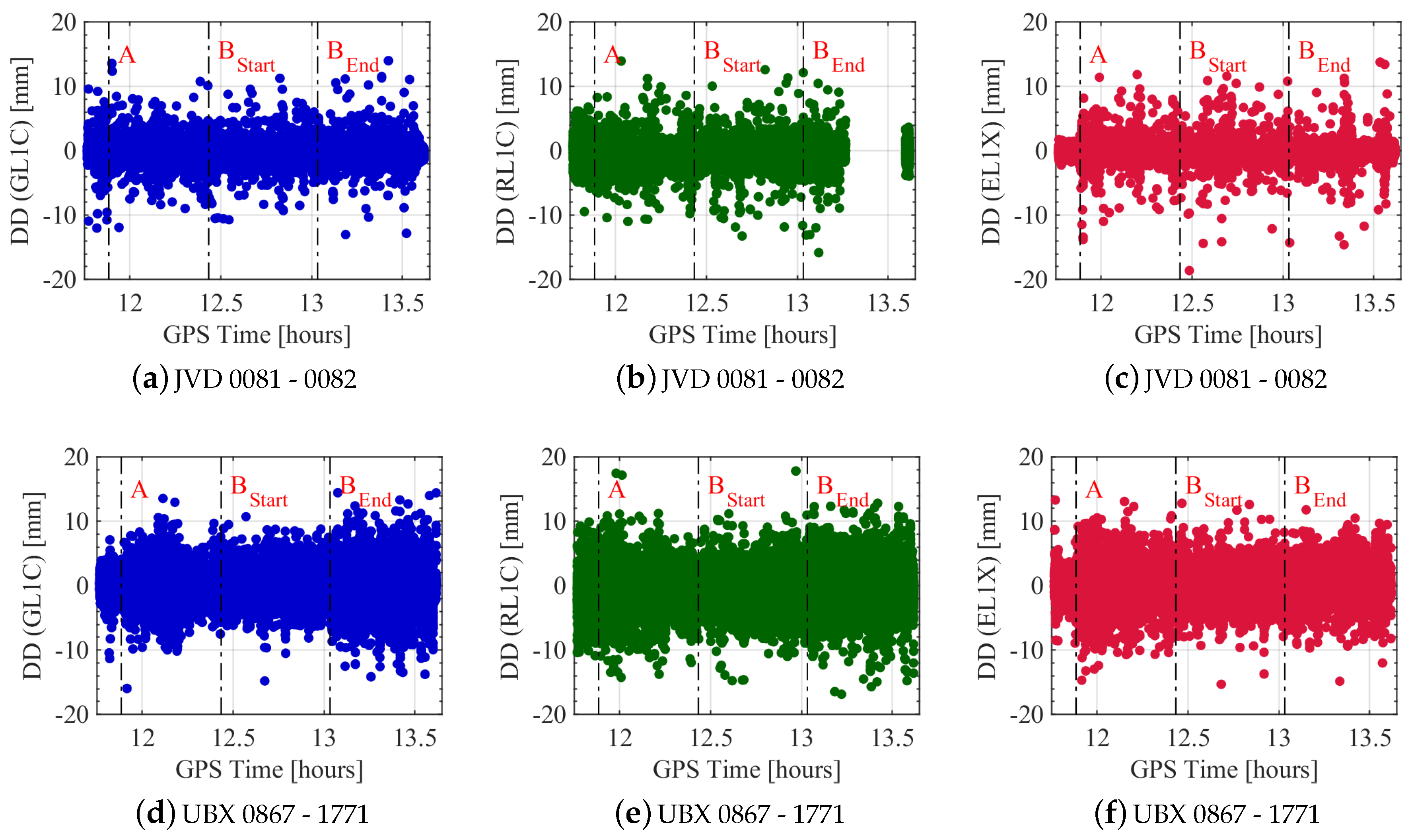
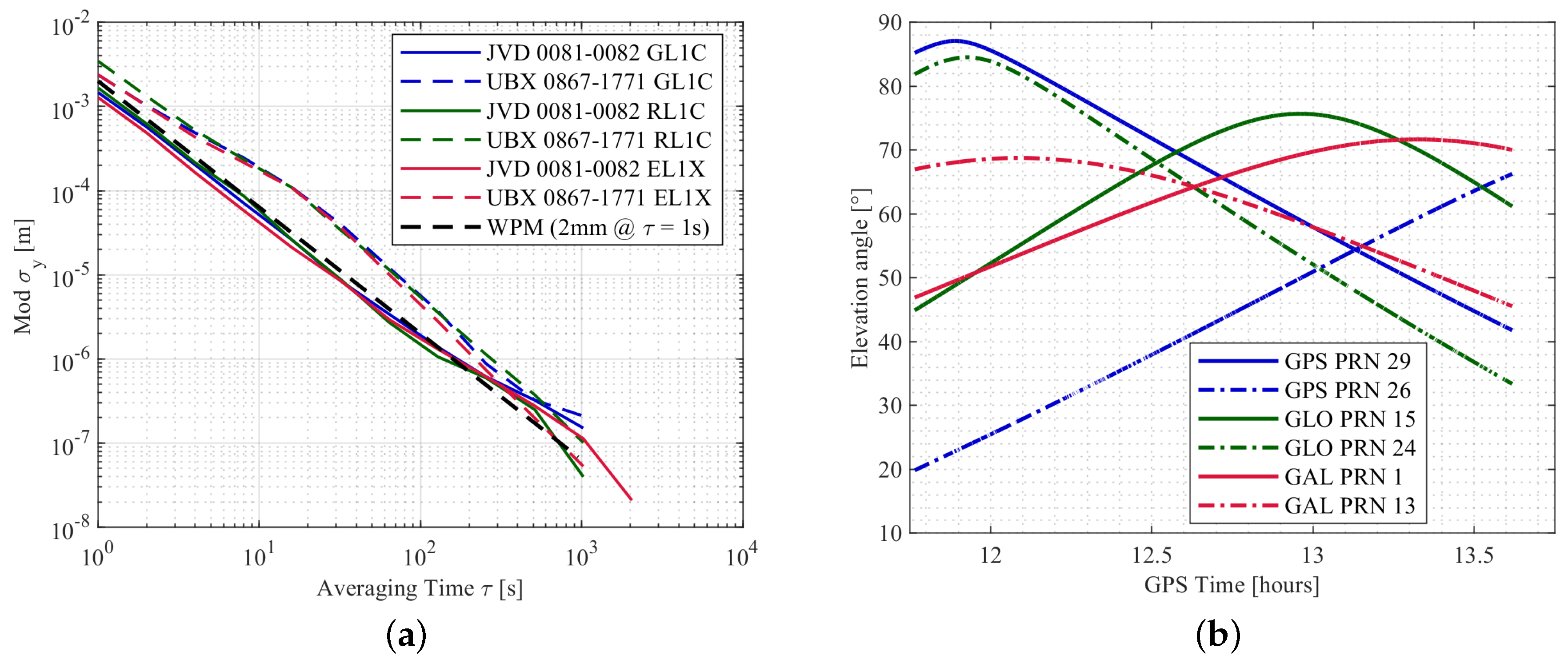
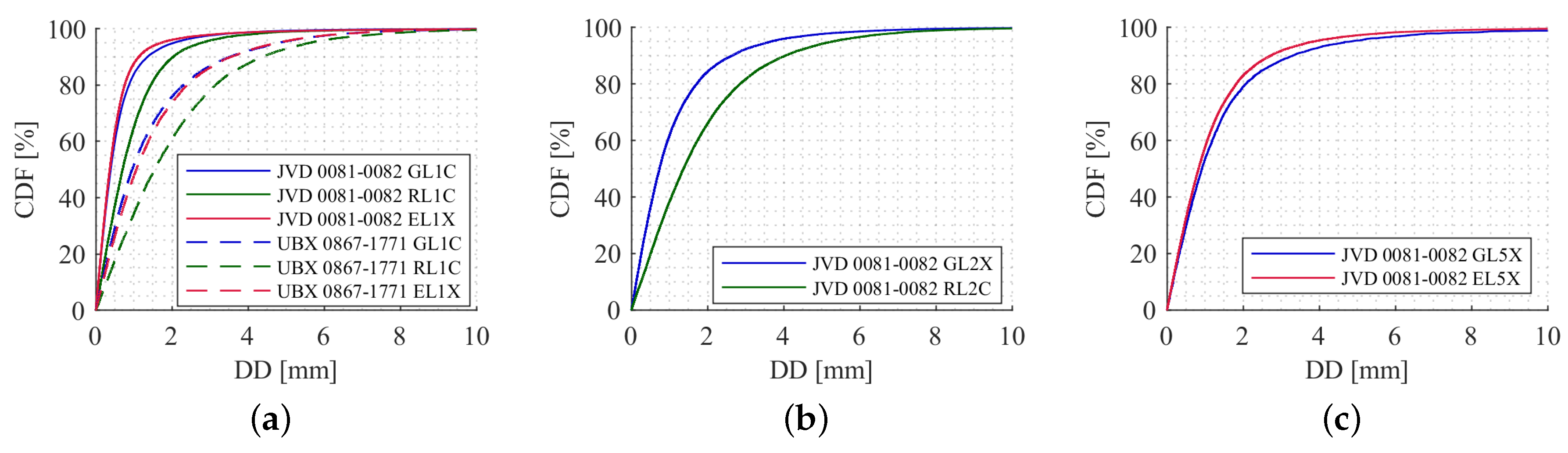
4.1. Urban Test Case
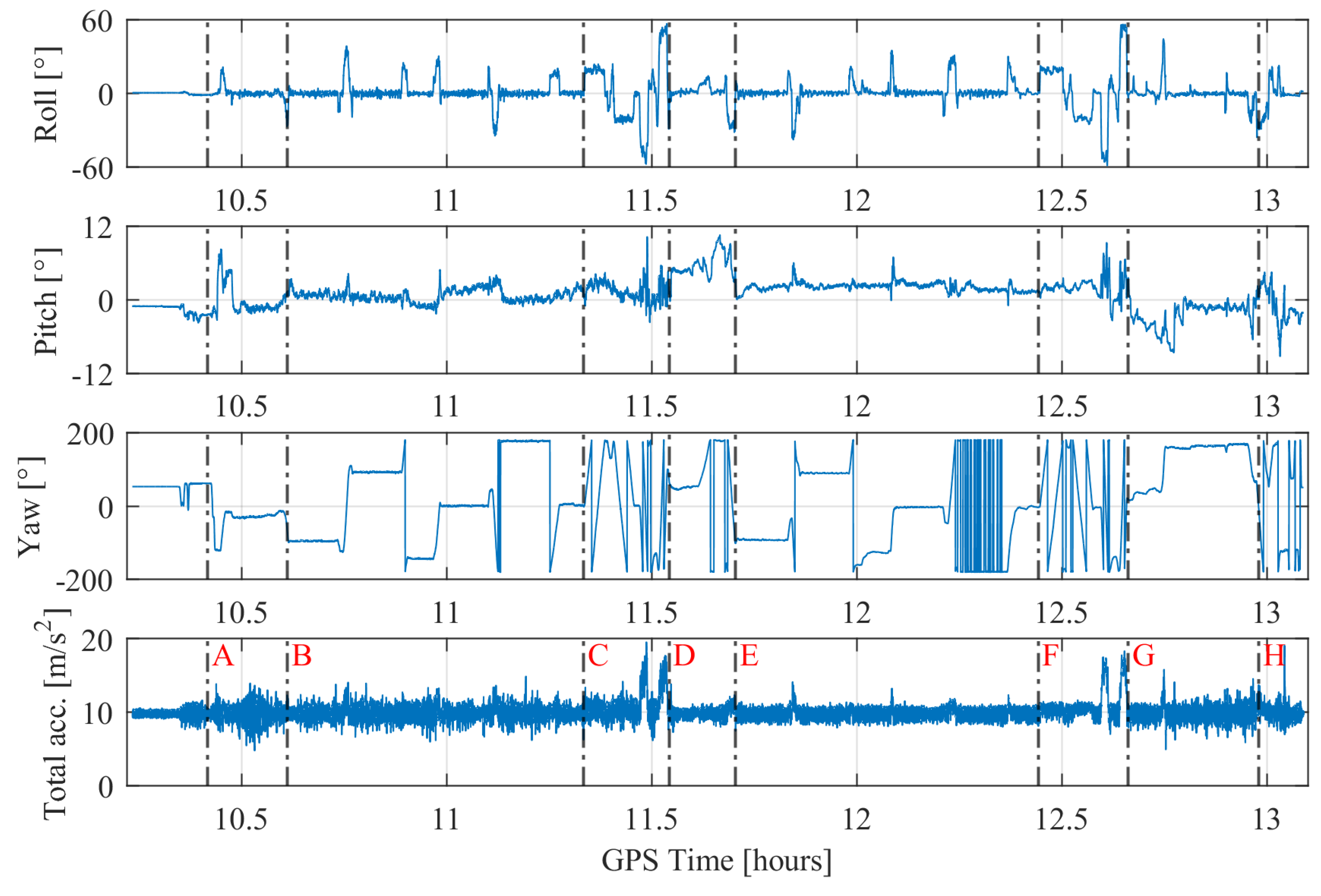
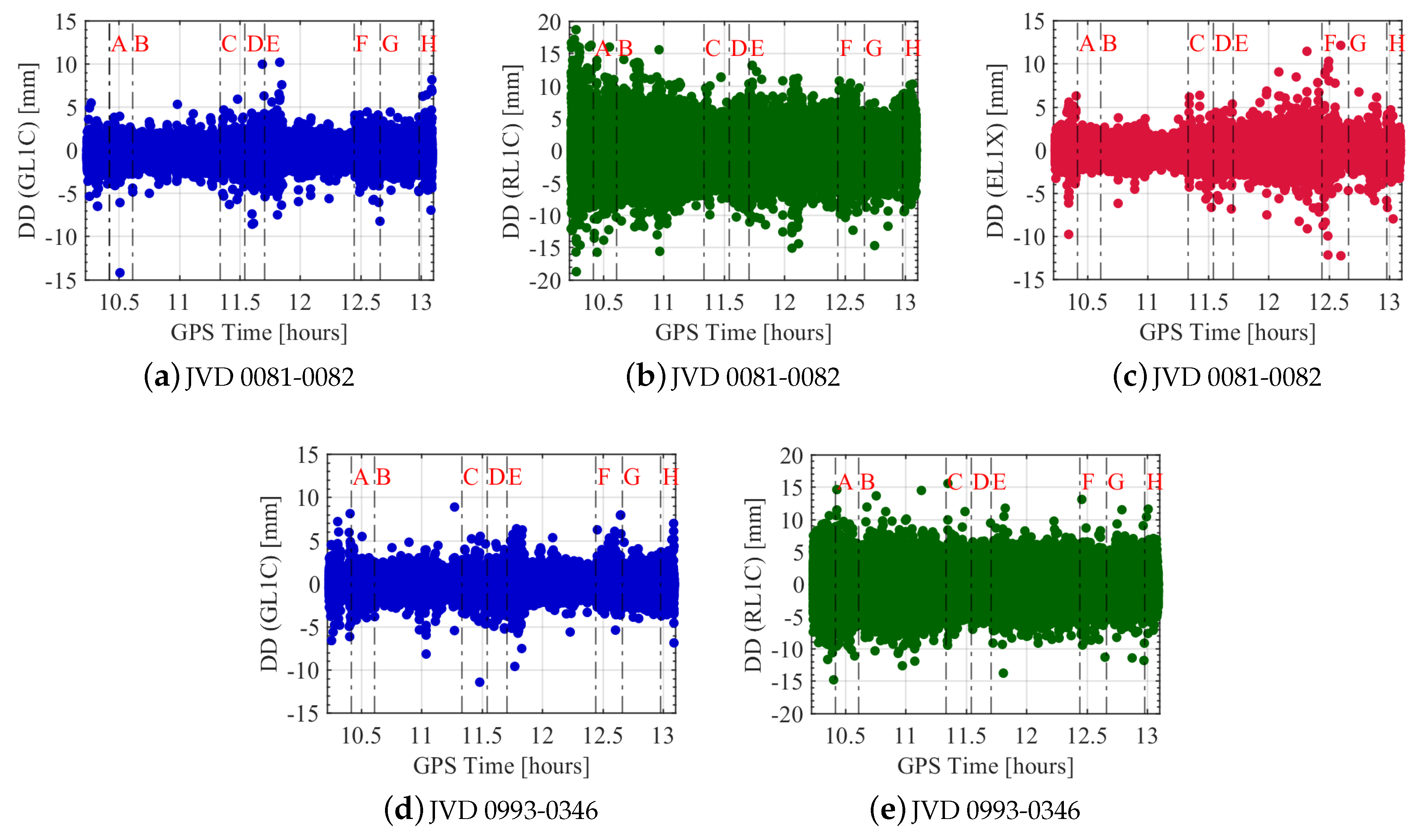
4.2. Flight Test Case
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Odijk, D. Positioning Model. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 605–638. [Google Scholar]
- Teunissen, P.J.; Jonkman, N.; Tiberius, C. Weighting GPS Dual Frequency Observations: Bearing the Cross of Cross-Correlation. GPS Solut. 1998, 2, 28–37. [Google Scholar] [CrossRef]
- Tiberius, C.; Kenselaar, F. Estimation of the Stochastic Model of GPS Code and Phase Observables. Surv. Rev. 2000, 35, 441–454. [Google Scholar] [CrossRef]
- Hartinger, H.; Brunner, F.K. Variances of GPS Phase Observations: The SIGMA-ϵ Model. GPS Solut. 1999, 2, 35–43. [Google Scholar] [CrossRef]
- Wieser, A.; Brunner, F.K. An extended weight model for GPS phase observations. Earth Planets Space 2000, 52, 777–782. [Google Scholar] [CrossRef]
- Luo, X.; Mayer, M.; Heck, B. Improving the Stochastic Model of GNSS Observations by Means of SNR-based Weighting. In Observing our Changing Earth; Sideris, M.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 133, pp. 725–734. [Google Scholar]
- Schön, S.; Brunner, F.K. Atmospheric turbulence theory applied to GPS carrier-phase data. J. Geod. 2008, 82, 47–57. [Google Scholar] [CrossRef]
- Kermarrec, G.; Schön, S. Taking correlations in GPS least squares adjustments into account with a diagonal covariance matrix. J. Geod. 2016, 90, 793–805. [Google Scholar] [CrossRef]
- Kersten, T.; Paffenholz, J.A. Feasibility of Consumer Grade GNSS Receivers for the Integration in Multi-Sensor-Systems. Sensors 2020, 20, 2463. [Google Scholar] [CrossRef]
- Wieser, A.; Gaggl, M.; Hartinger, H. Improved Positioning Accuracy with High-Sensitivity GNSS Receivers and SNR Aided Integrity Monitoring of Pseudo-Range Observations. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1545–1554. [Google Scholar]
- Krawinkel, T.; Schön, S. Benefits of receiver clock modeling in code-based GNSS navigation. GPS Solutions 2016, 20, 687–701. [Google Scholar] [CrossRef]
- Bochkati, M.; Schön, S. Steering a GNSS Low-cost Receiver with a Chip Scale Atomic Clock and its Impact on PVT Estimation. In Proceedings of the Navitec 2018 Signal Workshop, Noordwijk, The Netherlands, 5–7 December 2018; pp. 5–7. [Google Scholar]
- Euler, H.J.; Goad, C.C. On optimal filtering of GPS dual frequency observations without using orbit information. Bulletin Géodésique 1991, 65, 130–143. [Google Scholar] [CrossRef]
- Wang, K.; El-Mowafy, A.; Rizos, C.; Wang, J. Integrity Monitoring for Horizontal RTK Positioning: New Weighting Model and Overbounding CDF in Open-Sky and Suburban Scenarios. Remote Sens. 2020, 12, 1173. [Google Scholar] [CrossRef]
- Zhu, N.; Betaille, D.; Marais, J.; Berbineau, M. Extended Kalman Filter (EKF) Innovation-Based Integrity Monitoring Scheme with C/N0 Weighting. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- De Groot, L.; Infante, E.; Jokinen, A.; Kruger, B.; Norman, L. Precise Positioning for Automotive with Mass Market GNSS Chipsets. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 596–610. [Google Scholar]
- Stern, A.; Kos, A. Positioning Performance Assessment of Geodetic, Automotive, and Smartphone GNSS Receivers in Standardized Road Scenarios. IEEE Access 2018, 6, 41410–41428. [Google Scholar] [CrossRef]
- Reid, T.G.R.; Pervez, N.; Ibrahim, U.; Houts, S.E.; Pandey, G.; Alla, N.K.; Hsia, A. Standalone and RTK GNSS on 30,000 km of North American Highways. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 2135–2158. [Google Scholar] [CrossRef]
- Escher, M.; Stanisak, M.; Bestmann, U. Future Automotive GNSS Positioning in Urban Scenarios. In Proceedings of the 2016 International Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 836–845. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Betz, J.W.; Hegarty, C.J.; Parisi, S.J.; Milbert, D.; Pavloff, M.S.; Ward, P.W.; Leva, J.J.; Burke, J. Fundamentals of Satellite Navigation. In Understanding GPS/GNSS; Kaplan, E.D., Hegarty, C., Eds.; GNSS Technology and Applications Series; Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Zhang, X.; Wu, M.; Liu, W. Receiver Time Misalignment Correction for GPS-based Attitude Determination. J. Navig. 2015, 68, 646–664. [Google Scholar] [CrossRef]
- Willi, D.; Rothacher, M. GNSS attitude determination with non-synchronized receivers and short baselines onboard a spacecraft. GPS Solutions 2017, 21, 1605–1617. [Google Scholar] [CrossRef]
- Buist, P.J.; Teunissen, P.J.G.; Giorgi, G.; Verhagen, S. Functional model for spacecraft formation flying using non-dedicated GPS/Galileo receivers. In Proceedings of the 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Lim, C.; Yoon, H.; Cho, A.; Yoo, C.S.; Park, B. Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test. Electronics 2019, 8, 1518. [Google Scholar] [CrossRef]
- Bischof, C.; Schön, S. Vibration detection with 100 Hz GPS PVAT during a dynamic flight. Adv. Space Res. 2017, 59, 2779–2793. [Google Scholar] [CrossRef]
- Google Maps. Map presentation of the trajectories of the two experiments. Available online: https://www.google.com/maps/ (accessed on 24 September 2019).
- International GNSS Service. RINEX: Receiver Independent Exchange Format, Version 3.03. Available online: https://kb.igs.org/hc/article_attachments/202583897/RINEX%20303.pdf (accessed on 12 June 2020).
- Kjørsvik, N.S.; Brøste, E. Using TerraPOS for efficient and accurate marine positioning; Technical Report; TerraTec AS: Lysaker, Norway, 24 March 2009. [Google Scholar]
- JAVAD. GREIS: GNSS Receiver External Interface Specification. Available online: https://download.javad.com/manuals/GREIS/GREIS_Reference_Guide.pdf (accessed on 12 June 2020).
- Takasu, T. RTKLib: Open Source Program Package for RTK-GPS. In Proceedings of the Free and Open Source Software for Geospacial (FOSS4G), Tokyo, Japan, 1–3 November 2009. [Google Scholar]
- Petovello, M. Clock Offsets in GNSS Receivers. Inside GNSS 2011, 6, 23–25. [Google Scholar]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Beutler, G.; Gurtner, W.; Rothacher, M.; Wild, U.; Frei, E. Relative Static Positioning with the Global Positioning System: Basic Technical Considerations. In Global Positioning System: An Overview; Bock, Y., Leppard, N., Eds.; Springer: New York, NY, USA, 1990; pp. 1–23. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, H.K. Elimination of Clock Jump Effects in Low-Quality Differential GPS Measurements. J. Electr. Eng. Technol. 2012, 7, 626–635. [Google Scholar] [CrossRef]
- Cosentino, R.J.; Diggle, D.W.; Uijt de Haag, M.; Hegarty, C.J.; Milbert, D.; Nagle, J. Differential GPS. In Understanding GPS; Kaplan, E.D., Hegarty, C.J., Eds.; Artech House: Boston, MA, USA, 2006; pp. 379–458. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS-Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and more; Springer-Verlag Wien: Vienna, Austria, 2008. [Google Scholar] [CrossRef]
- Habrich, H. Geodetic Applications of the Global Navigation Satellite System (GLONASS) and of GLONASS/GPS Combinations. Inaugural Dissertation, University of Bern, Bern, Germany, 1999. [Google Scholar]
- Takac, F.; Petovello, M. GLONASS interfrequency biases and ambiguity resolution. InsideGNSS 2009, 4, 24–28. [Google Scholar]
- Allan, D. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef]
- Allan, D. Time and Frequency (Time-Domain) Characterization, Estimation, and Prediction of Precision Clocks and Oscillators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1987, 34, 647–654. [Google Scholar] [CrossRef]
- Betaille, D.; Peyret, F.; Ortiz, M.; Miquel, S.; Fontenay, L. A New Modeling Based on Urban Trenches to Improve GNSS Positioning Quality of Service in Cities. IEEE Intell. Transp. Syst. Mag. 2013, 5, 59–70. [Google Scholar] [CrossRef]
- Icking, L.; Kersten, T.; Schön, S. Evaluating the Urban Trench Model for Improved Positioning in Urban Areas. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 631–638. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label Points | Urban Experiment Details | Approximate GPS Time |
|---|---|---|
| A | Start of the experiment. Standstill phase. | 11:45:00 |
| A | End of the standstill phase. | 11:53:00 |
| B (B) | Repeatedly driven trajectory. Five rounds in total. | 12:26:00 |
| B (B) | End of the repeatedly driven trajectory. | 13:02:00 |
| C | End of the experiment. | 13:37:00 |
| GNSS System | Geodetic Receiver | High Sensitivity Receiver |
|---|---|---|
| GPS | L1C, L1W, L2X, L2W, L5X | L1C |
| GLONASS | L1C, L1P, L2C, L2P | L1C |
| Galileo | L1X, L5X | L1X |
| Label Points | Flight Experiment Details | Approximate GPS Time |
|---|---|---|
| A | Flight take off phase beginning | 10:25:00 |
| B | Start of straight and level flight phase at the lower altitude, particularly flight beginning to move from east to west | 10:36:40 |
| C | Beginning of dynamic manoeuvres (first two flight turns with roll angles up to ± 25 and later two steep flight turns with roll angles up to ± 58) at lower altitude | 11:20:00 |
| D | Flight starts ascending to a higher altitude | 11:32:30 |
| E | Start of straight and level flight phase at a higher altitude, flight again starts moving from east to west | 11:42:15 |
| F | Beginning of dynamic manoeuvres at a higher altitude (first two turns with roll angles of up to ± 25 and later again two steep turns with roll angles up to ± 59) | 12:26:30 |
| G | Flight starts descending phase | 12:39:40 |
| H | Beginning of the flight landing phase | 12:58:45 |
| Rec. Pair | # Observations | # Cycle Slips | # Outliers | # Ambiguities | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GPS | GLO | GAL | GPS | GLO | GAL | GPS | GLO | GAL | GPS | GLO | GAL | |
| JVD (urban) 0081-0082 | 38,157 | 35,387 | 27,517 | 1632 | 1154 | 569 | 851 | 794 | 189 | 3318 | 3028 | 582 |
| UBX (urban) 0867-1771 | 34,805 | 33,399 | 27,783 | 723 | 1064 | 80 | 407 | 632 | 116 | 3082 | 3249 | 1160 |
| JVD (aerial) 0081-0082 | 136,285 | 87,464 | 75,594 | 82 | 68 | 40 | 59 | 71 | 43 | 426 | 419 | 174 |
| JVD (aerial) 0993-0346 | 136,167 | 87,660 | - | 342 | 193 | - | 180 | 192 | - | 750 | 676 | - |
| GPS L1 | GLONASS L1 | Galileo L1 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| C | L | Ratio [%] | C | L | Ratio [%] | C | L | Ratio [%] | |
| JVD 0081 | 39,558 | 39,558 | 0 | 37,144 | 37,144 | 0 | 28,201 | 28,201 | 0 |
| JVD 0082 | 39,795 | 39,795 | 0 | 36,647 | 36,647 | 0 | 28,177 | 28,177 | 0 |
| UBX 0867 | 46,405 | 35,368 | –24 | 45,301 | 33,940 | –25 | 33,884 | 28,034 | –17 |
| UBX 1771 | 48,402 | 36,201 | –25 | 46,028 | 33,986 | –26 | 34,475 | 28,111 | –18 |
| Observation Type | a [mm] | a [mm] | h [] |
|---|---|---|---|
| GL1C | 1.1 | 3.2 | 15 |
| RL1C | 3.2 | 5.5 | 20 |
| EL1X | 1.2 | 3 | 15 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruwisch, F.; Jain, A.; Schön, S. Characterisation of GNSS Carrier Phase Data on a Moving Zero-Baseline in Urban and Aerial Navigation. Sensors 2020, 20, 4046. https://doi.org/10.3390/s20144046
Ruwisch F, Jain A, Schön S. Characterisation of GNSS Carrier Phase Data on a Moving Zero-Baseline in Urban and Aerial Navigation. Sensors. 2020; 20(14):4046. https://doi.org/10.3390/s20144046
Chicago/Turabian StyleRuwisch, Fabian, Ankit Jain, and Steffen Schön. 2020. "Characterisation of GNSS Carrier Phase Data on a Moving Zero-Baseline in Urban and Aerial Navigation" Sensors 20, no. 14: 4046. https://doi.org/10.3390/s20144046
APA StyleRuwisch, F., Jain, A., & Schön, S. (2020). Characterisation of GNSS Carrier Phase Data on a Moving Zero-Baseline in Urban and Aerial Navigation. Sensors, 20(14), 4046. https://doi.org/10.3390/s20144046