Fusion of Hyperspectral CASI and Airborne LiDAR Data for Ground Object Classification through Residual Network


Abstract
1. Introduction
2. Materials and Methods
2.1. Multi-Sensor Data Collection
2.2. Image Registration and Dimensionality Reduction
2.3. Feature Extraction
2.3.1. Normalization of the Vegetation Index
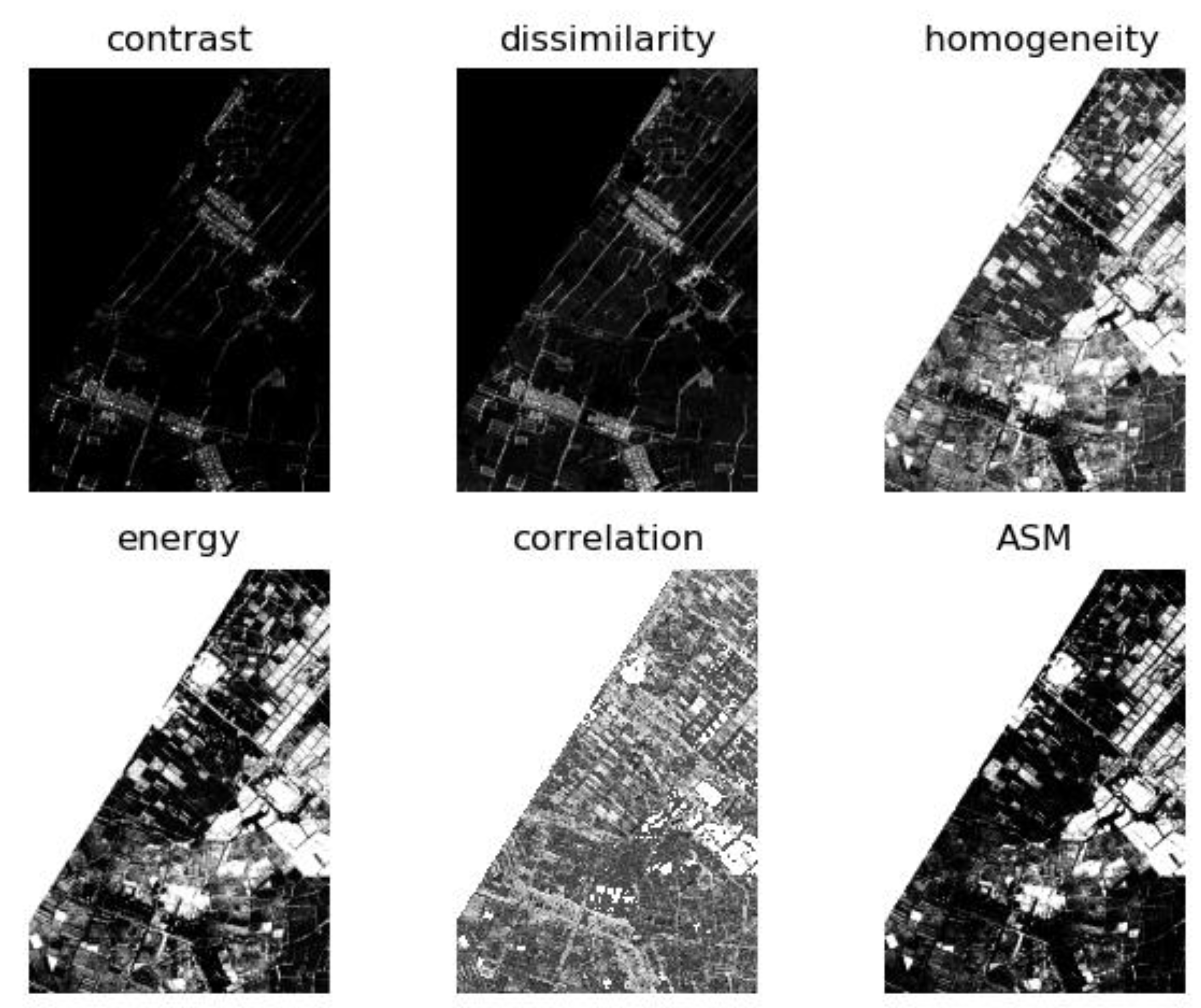
2.3.2. Gray-Level Co-Occurrence Matrices
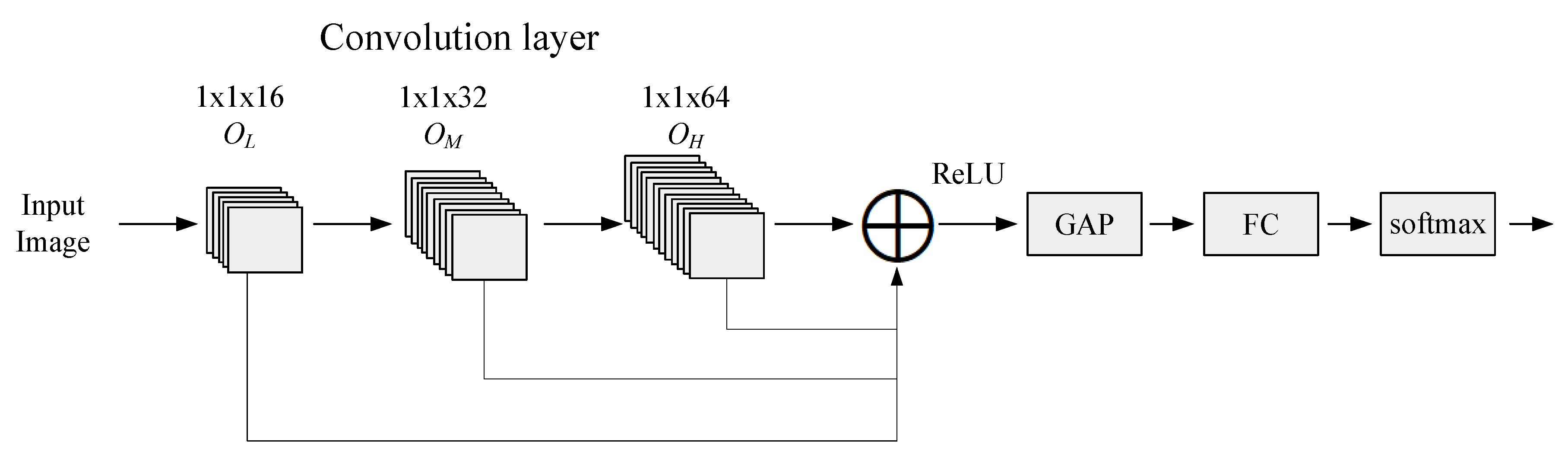
2.4. Ground Object Classification with Hierarchical-Fusion Multiscale Dilated Residual Networks
3. Experiments and Analysis
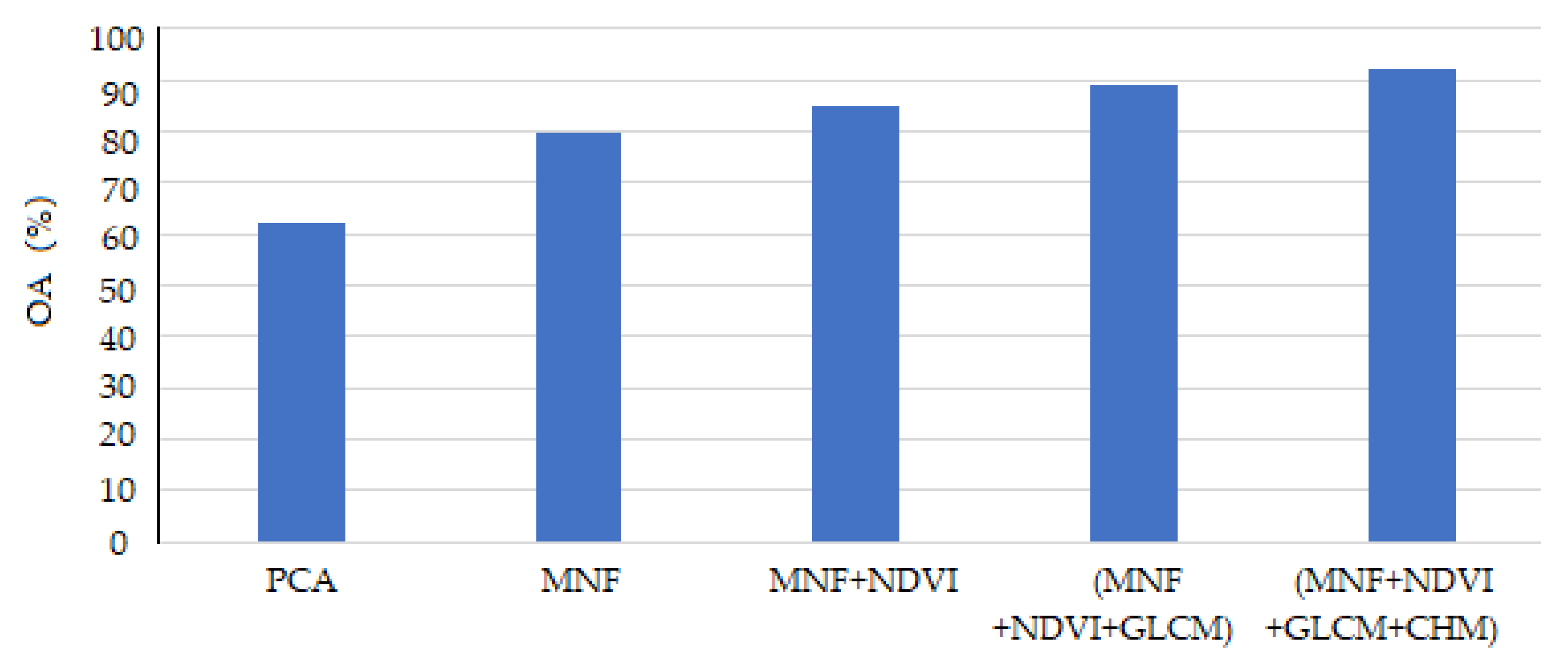
3.1. Feature Fusion Experiments
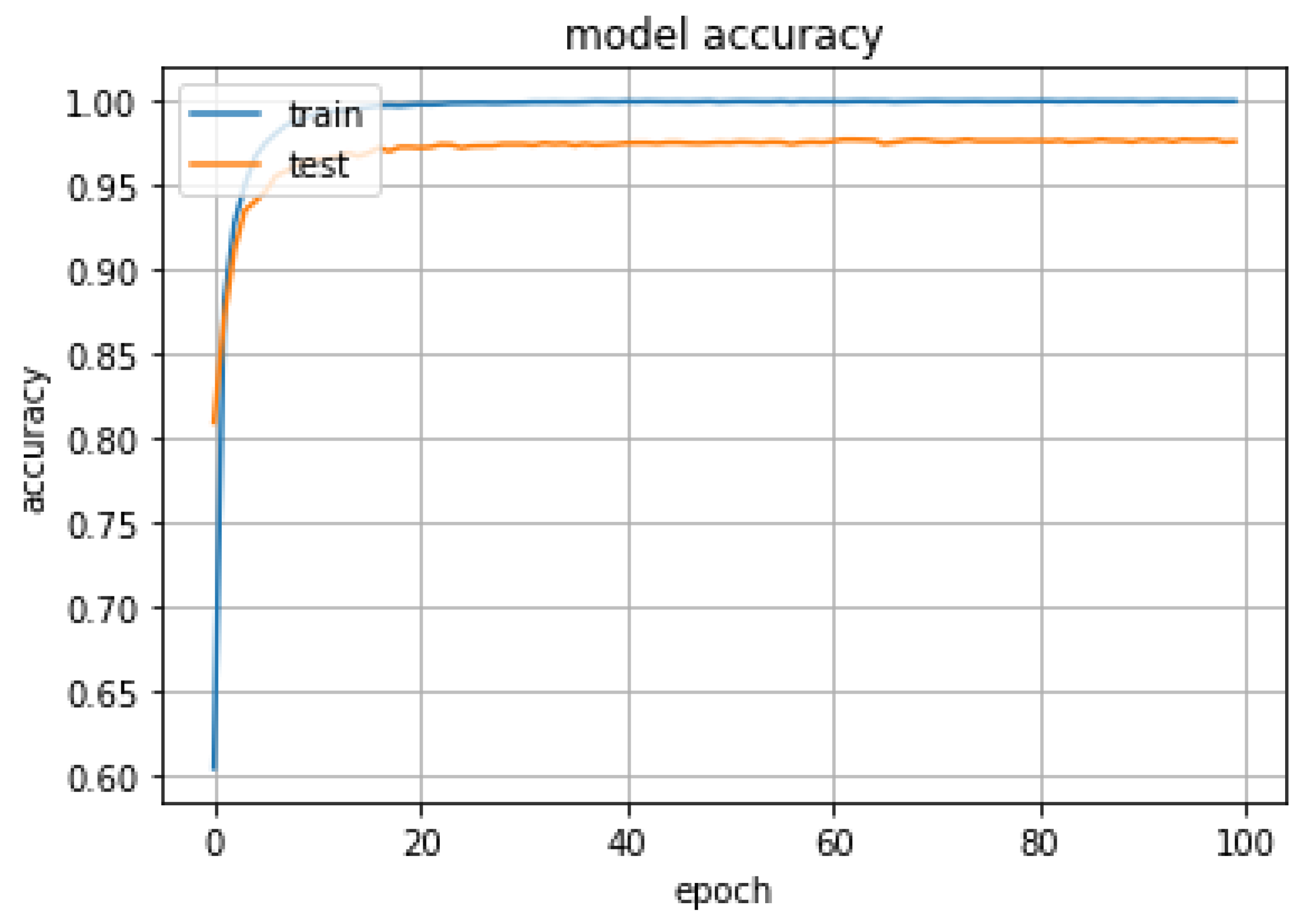
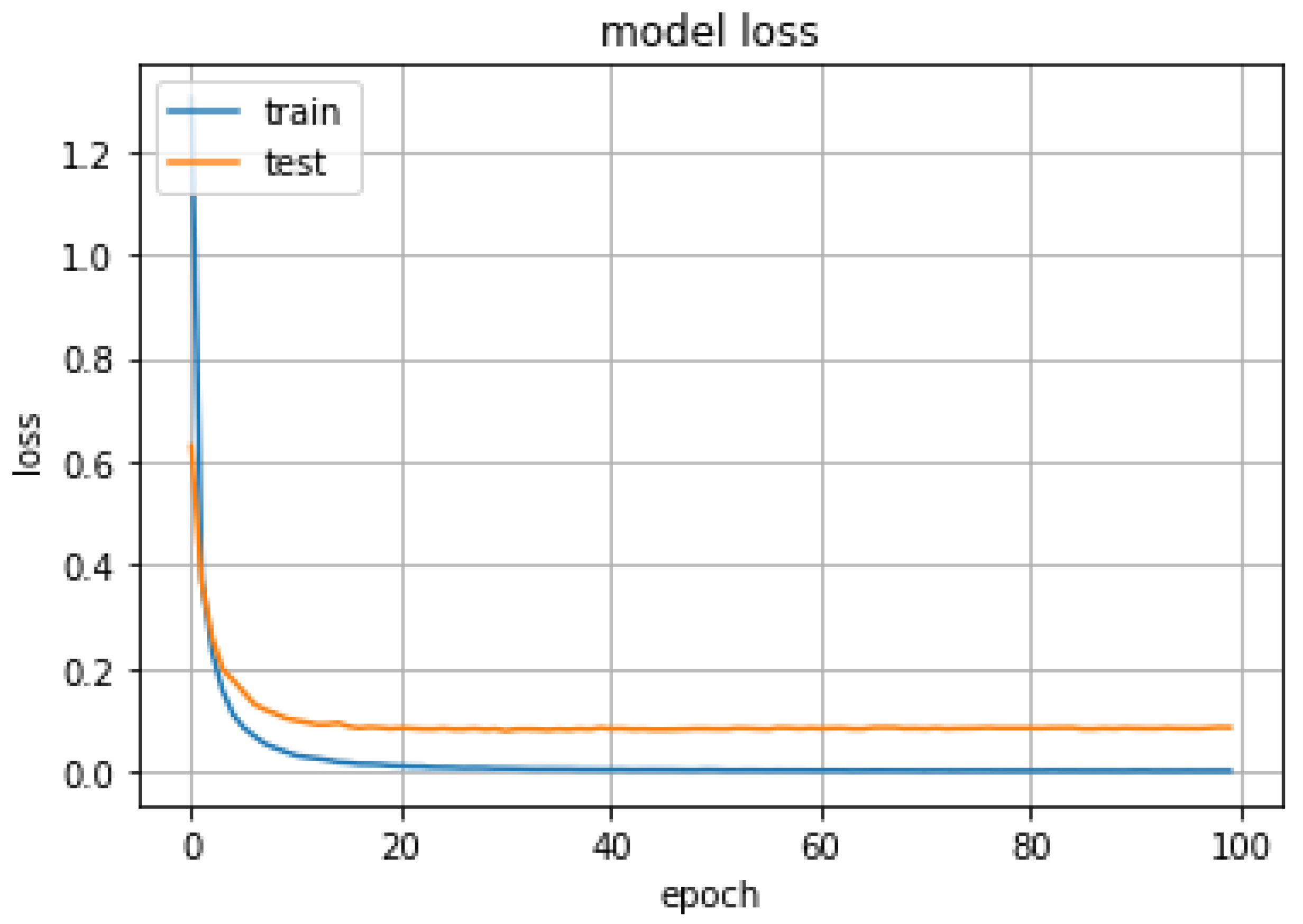
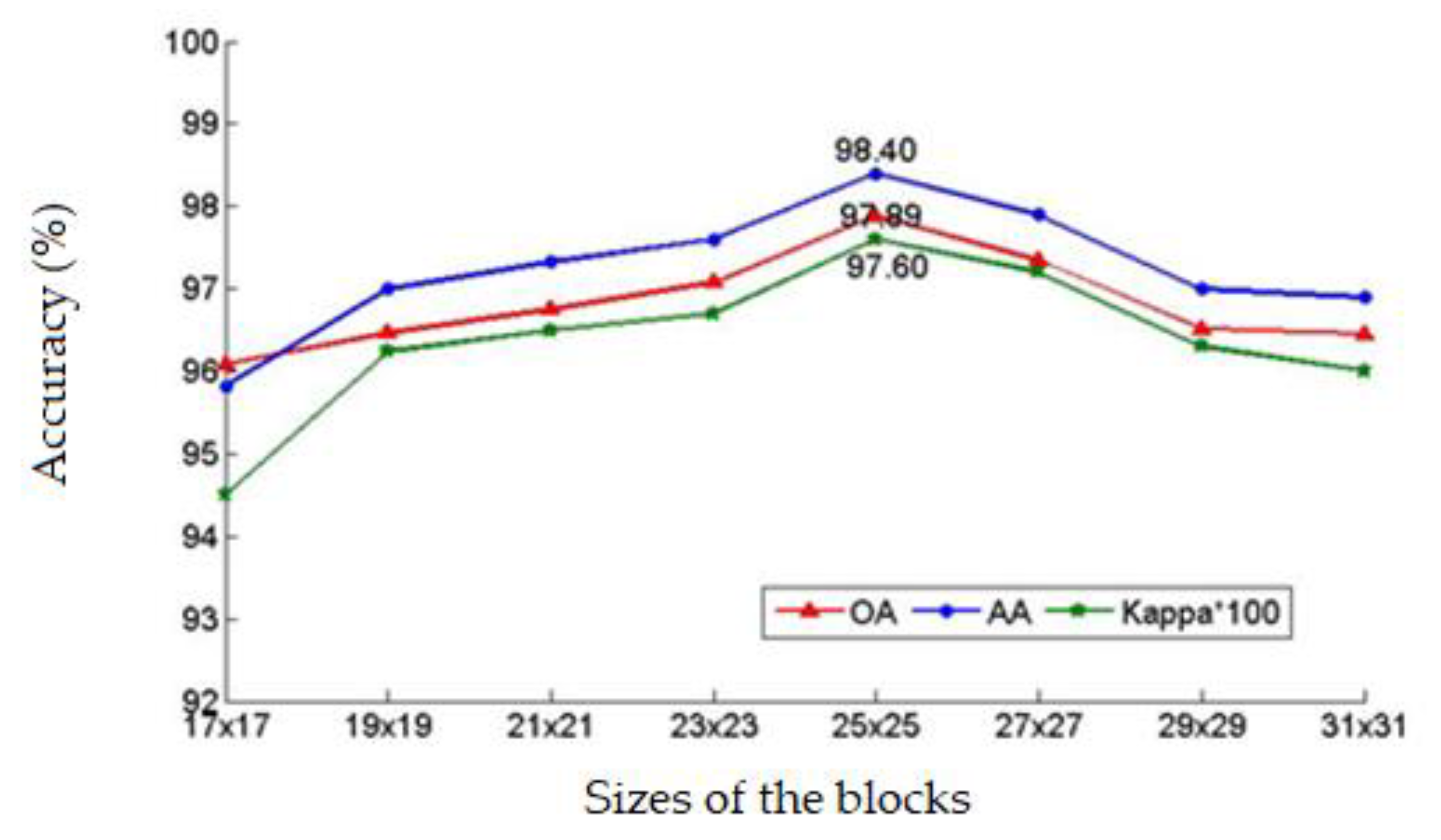
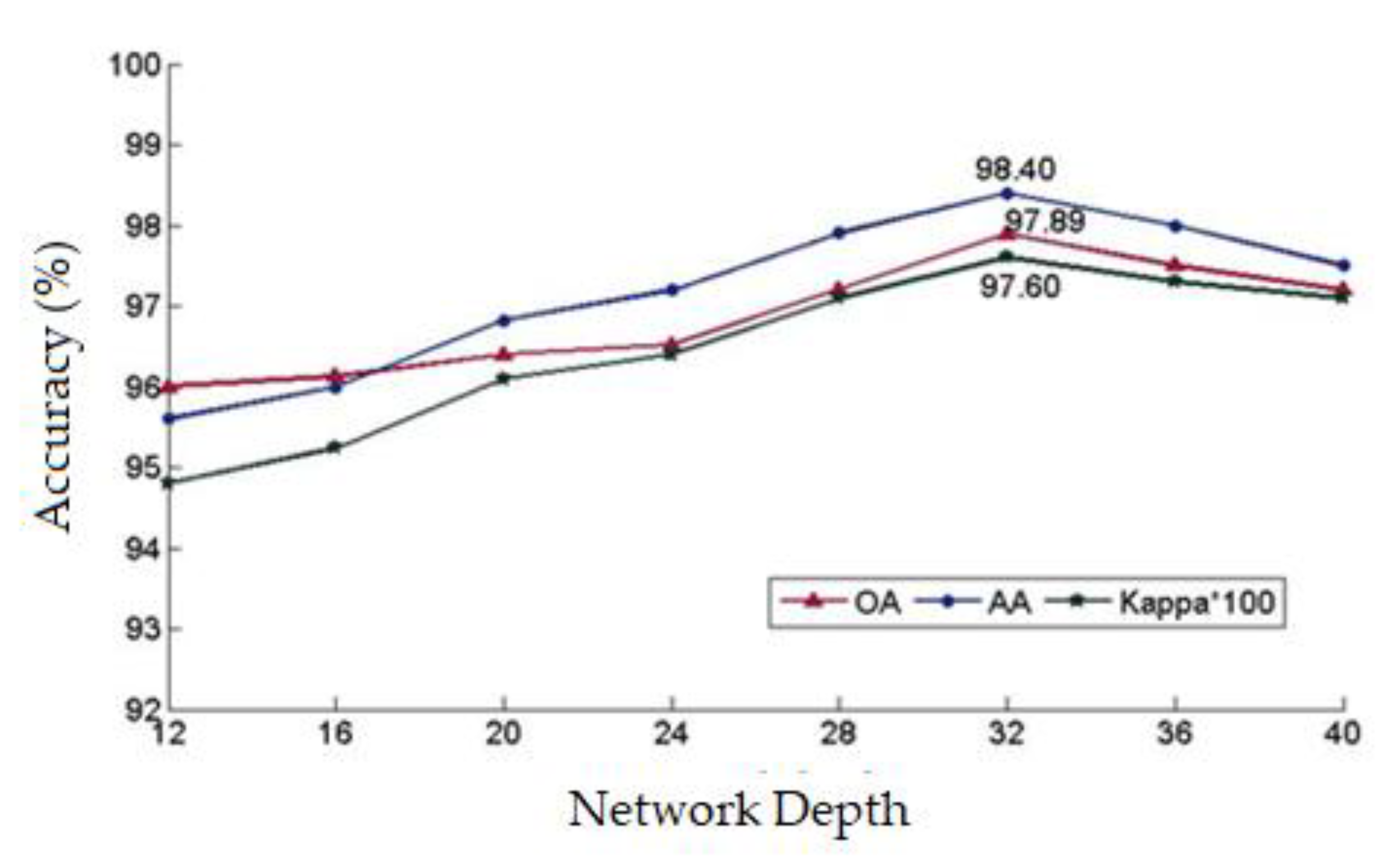
3.2. Classification with Hierarchical-Fusion Residual Networks
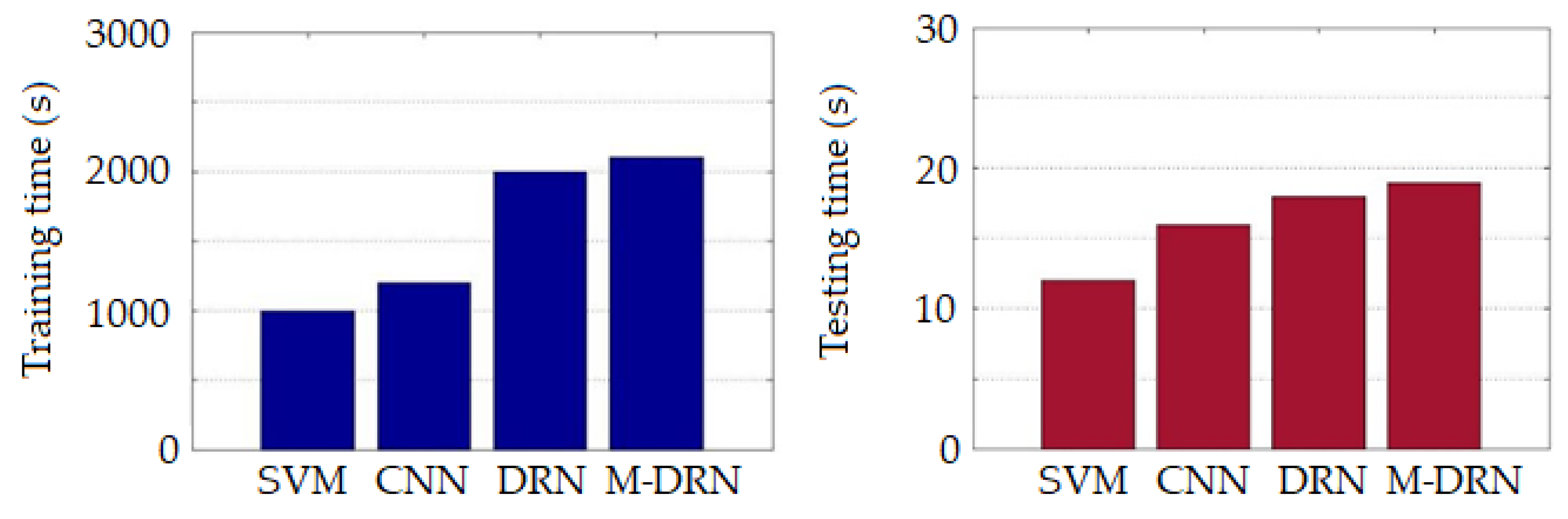
3.3. Comparative Classification Experiments
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bhardwaj, A.; Sam, L.; Bhardwaj, A.; Martín-Torres, F. LiDAR remote sensing of the cryosphere: Present applications and future prospects. Remote Sens. Environ. 2016, 1771, 25–143. [Google Scholar] [CrossRef]
- Kolzenburg, S.; Favalli, M.; Fornaciai, A.; Isola, I.; Harris, A.J.L.; Nannipieri, L.; Giordano, D. Rapid Updating and Improvement of Airborne LIDAR DEMs Through Ground-Based SfM 3-D Modeling of Volcanic Features. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6687–6699. [Google Scholar] [CrossRef]
- Sothe, C.; Dalponte, M.; Almeida, C.M.D.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Tommaselli, A.M.G. Tree Species Classification in a Highly Diverse Subtropical Forest Integrating UAV-Based Photogrammetric Point Cloud and Hyperspectral Data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef]
- Abeysinghe, T.; Simic Milas, A.; Arend, K.; Hohman, B.; Reil, P.; Gregory, A.; Vázquez-Ortega, A. Mapping Invasive Phragmites Australis in the Old Woman Creek Estuary Using UAV Remote Sensing and Machine Learning Classifiers. Remote Sens. 2019, 11, 1380. [Google Scholar] [CrossRef]
- Cao, J.; Leng, W.; Liu, K.; Liu, L.; He, Z.; Zhu, Y. Object-Based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models. Remote Sens. 2018, 10, 89. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Raval, S.; Cullen, P. UAV-hyperspectral imaging of spectrally complex environments. Int. Remote Sens. 2020, 41, 4136–4159. [Google Scholar] [CrossRef]
- Tong, X.; Li, X.; Xu, X.; Xie, H.; Feng, T.; Sun, T.; Jin, Y.; Liu, X. A Two-Phase Classification of Urban Vegetation Using Airborne LiDAR Data and Aerial Photography. IEEE Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4153–4166. [Google Scholar] [CrossRef]
- Matikainen, L.; Karila, K.; Litkey, P.; Ahokas, E.; Hyyppä, J. Combining single photon and multispectral airborne laser scanning for land cover classification. ISPRS Photogramm. Remote Sens. 2020, 1642, 200–216. [Google Scholar] [CrossRef]
- Liu, X.; Bo, Y. Object-Based Crop Species Classification Based on the Combination of Airborne Hyperspectral Images and LiDAR Data. Remote Sens. 2015, 7, 922–950. [Google Scholar] [CrossRef]
- Chu, H.J.; Wang, C.K.; Kong, S.J.; Chen, K.C. Integration of full-waveform Li DAR and hyperspectral data to enhance tea and areca classification. GISci. Remote Sens. 2016, 53, 542–559. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Ørka, H.O.; Gobakken, T.; Næsset, E.; Gianelle, D. Predicting stem diameters and aboveground biomass of individual trees using remote sensing data. Ecol. Indic. 2018, 85, 367–376. [Google Scholar] [CrossRef]
- Jahan, F.; Zhou, J.; Awrangjeb, M.; Gao, Y. Inverse Coefficient of Variation Feature and Multilevel Fusion Technique for Hyperspectral and LiDAR Data Classification. IEEE Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 133, 67–381. [Google Scholar] [CrossRef]
- Hardy, A.J.; Barr, S.L.; Mills, J.P.; Miller, P.E. Characterising soil moisture in transport corridor environments using airborne LIDAR and CASI data. Hydrol. Process. 2012, 26, 1925–1936. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Z.; Ren, T.; Liu, D.; Ma, Z.; Tong, L.; Zhang, C.; Zhou, T.; Zhang, X.; Li, S. Identification of Seed Maize Fields with High Spatial Resolution and Multiple Spectral Remote Sensing Using Random Forest Classifier. Remote Sens. 2020, 12, 362. [Google Scholar] [CrossRef]
- Akar, O.; Gungor, O. Integrating multiple texture methods and NDVI to the Random Forest classification algorithm to detect tea and hazelnut plantation areas in northeast Turkey. Int. Remote Sens. 2015, 36, 442–464. [Google Scholar] [CrossRef]
- Kang, X.; Li, S.; Benediktsson, A. Feature Extraction of Hyperspectral Images with Image Fusion and Recursive Filtering. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3742–3752. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburn, G.A. Optimising the use of hyperspectral and LiDAR data for mapping reedbed habitats. Remote Sens. Environ. 2011, 115, 2025–2034. [Google Scholar] [CrossRef]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An Improved Quantum-Inspired Differential Evolution Algorithm for Deep Belief Network. IEEE Trans. Instrum. Meas 2020. [Google Scholar] [CrossRef]
- Mou, L.; Ghamisi, P.; Zhu, X.X. Unsupervised Spectral-Spatial Feature Learning via Deep Residual Conv-Deconv Network for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 391–406. [Google Scholar] [CrossRef]
- Aptoula, E.; Ozdemir, M.C.; Yanikoglu, B. Deep Learning With Attribute Profiles for Hyperspectral Image Classification. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1970–1974. [Google Scholar] [CrossRef]
- Govender, M.; Chetty, K.; Naiken, V.; Bulcock, H. A Comparison of Satellite Hyperspectral and Multispectral Remote Sensing Imagery for Improved Classification and Mapping of Vegetation. Water SA 2008, 34, 147–154. [Google Scholar] [CrossRef]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H. Deep Convolutional Neural Networks for Hyperspectral Image Classification. J. Sens. 2015, 2015, 258619. [Google Scholar] [CrossRef]
- Zhao, W.; Du, S. Spectral–Spatial Feature Extraction for Hyperspectral Image Classification: A Dimension Reduction and Deep Learning Approach. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4544–4554. [Google Scholar] [CrossRef]
- Zhong, Z.; Li, J.; Luo, Z.; Chapman, M. Spectral-Spatial Residual Network for Hyperspectral Image Classification: A 3-D Deep Learning Framework. IEEE Trans. Geosci. Remote Sens. 2018, 56, 847–858. [Google Scholar] [CrossRef]
- Garcia-Salgado, B.P.; Ponomaryov, P. Feature extraction scheme for a textural hyperspectral image classification using gray-scaled HSV and NDVI image features vectors fusion. Int. Conf. Electron. Commun. Comput. 2016, 1, 86–191. [Google Scholar]
- Vaddi, R.; Manoharan, P. Hyperspectral Image Classification Using CNN with Spectral and Spatial Features Integration. Infrared Phys. Technol. 2020, 1071, 03296. [Google Scholar] [CrossRef]
- Ia, X.; Kuo, B.C.; Crawford, M.M. Feature Mining for Hyperspectral Image Classification. Proc. IEEE 2013, 101, 676–697. [Google Scholar]
- Nielsen, A.A. Kernel maximum autocorrelation factor and minimum noise fraction transformations. IEEE Trans. Image Process. 2010, 20, 612–624. [Google Scholar] [CrossRef]
- Guan, L.X.; Xie, W.X.; Pei, H. Segmented minimum noise fraction transformation for efficient feature extraction of hyperspectral images. Pattern Recognit. 2015, 48, 3216–3226. [Google Scholar]
- Zhang, Y.Z.; Xu, M.M.; Wang, X.H.; Wang, K.Q. Hyperspectral image classification based on hierarchical fusion of residual networks. Spectrosc. Spectr. Anal. 2019, 39, 3501–3507. [Google Scholar]
- Hsiao, T.Y.; Chang, Y.C.; Chou, H.H.; Chiu, C.T. Filter-based deep-compression with global average pooling for convolutional networks. Syst. Archit. 2019, 95, 9–18. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting |
|---|---|
| Matching algorithm | Mutual information |
| Minimum tie-point matching threshold | 0.01 |
| Geometric model | Fitting global transform |
| Reference-image registration band | 1 |
| Target-image registration band | 20 |
| Search window size | 128 × 128 |
| Match window size | 61 × 61 |
| No. | Category | Training/Testing Pixels | Total Pixels |
|---|---|---|---|
| 1 | Corn | 426495/182784 | 609279 |
| 2 | Leek | 17468/7487 | 24955 |
| 3 | White poplar | 75211/32233 | 107444 |
| 4 | Cauliflower | 50467/21628 | 72095 |
| 5 | Pepper | 107099/45900 | 152999 |
| 6 | Potato | 18309/7847 | 26156 |
| 7 | Green bamboo shoot | 3618/1550 | 5168 |
| 8 | Watermelon | 28318/12136 | 40454 |
| 9 | Green bean | 1830/785 | 2615 |
| 10 | Building | 172774/31189 | 203963 |
| No. | Fused Features | Number |
|---|---|---|
| 1 | Single-Band PCA | 1 |
| 2 | MNF | 3 |
| 3 | MNF + NDVI | 4 |
| 4 | MNF + NDVI + GLCM | 10 |
| 5 | MNF + NDVI + GLCM + CHM | 11 |
| Category | Corn | Leek | White Poplar | Cauliflower | Pepper | Potato | Green Bamboo Shoot | Watermelon | Green Bean | Building |
|---|---|---|---|---|---|---|---|---|---|---|
| UA (%) | 98.92 | 98.75 | 99.10 | 98.54 | 98.46 | 98.18 | 97.63 | 98.30 | 97.38 | 98.77 |
| OA (%) | 97.89 | AA (%) | 98.40 | Kappa | 0.976 |
| SVM | CNN | DRN | M-DRN | |
|---|---|---|---|---|
| OA (%) | 80.32 | 87.76 | 92.21 | 97.89 |
| AA (%) | 80.76 | 87.97 | 92.53 | 98.40 |
| Kappa | 0.797 | 0.872 | 0.918 | 0.976 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, Z.; Yu, H.; Zhang, Y.; Wang, K. Fusion of Hyperspectral CASI and Airborne LiDAR Data for Ground Object Classification through Residual Network. Sensors 2020, 20, 3961. https://doi.org/10.3390/s20143961
Chang Z, Yu H, Zhang Y, Wang K. Fusion of Hyperspectral CASI and Airborne LiDAR Data for Ground Object Classification through Residual Network. Sensors. 2020; 20(14):3961. https://doi.org/10.3390/s20143961
Chicago/Turabian StyleChang, Zhanyuan, Huiling Yu, Yizhuo Zhang, and Keqi Wang. 2020. "Fusion of Hyperspectral CASI and Airborne LiDAR Data for Ground Object Classification through Residual Network" Sensors 20, no. 14: 3961. https://doi.org/10.3390/s20143961
APA StyleChang, Z., Yu, H., Zhang, Y., & Wang, K. (2020). Fusion of Hyperspectral CASI and Airborne LiDAR Data for Ground Object Classification through Residual Network. Sensors, 20(14), 3961. https://doi.org/10.3390/s20143961