Social STEAM Learning at an Early Age with Robotic Platforms: A Case Study in Four Schools in Spain




Abstract
1. Introduction
2. Materials and Methods
2.1. The Used Robotic Kits
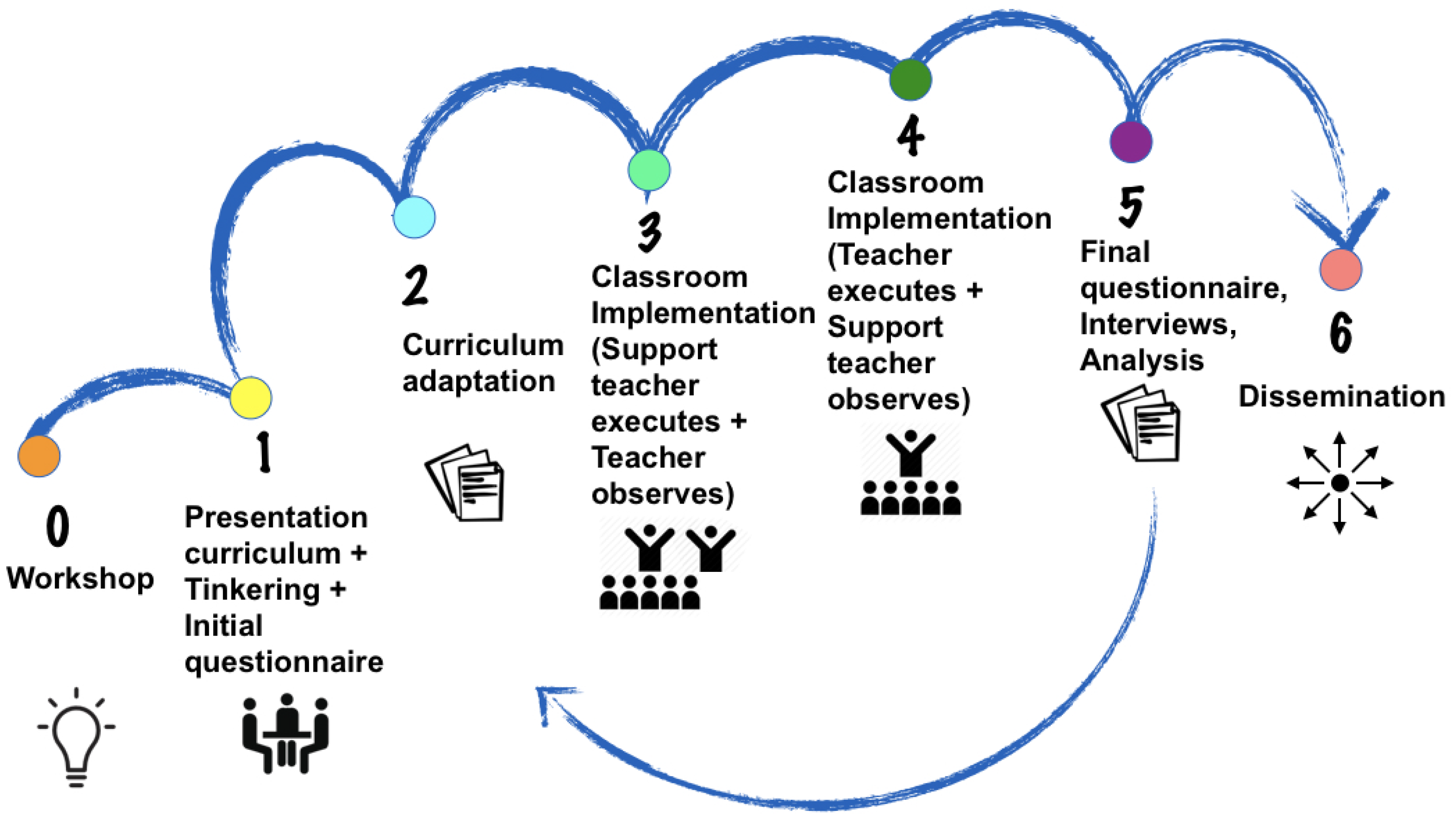
2.2. Methodology to Train Teachers
2.3. Developed Curriculum
2.4. Methodology to Evaluate the Training
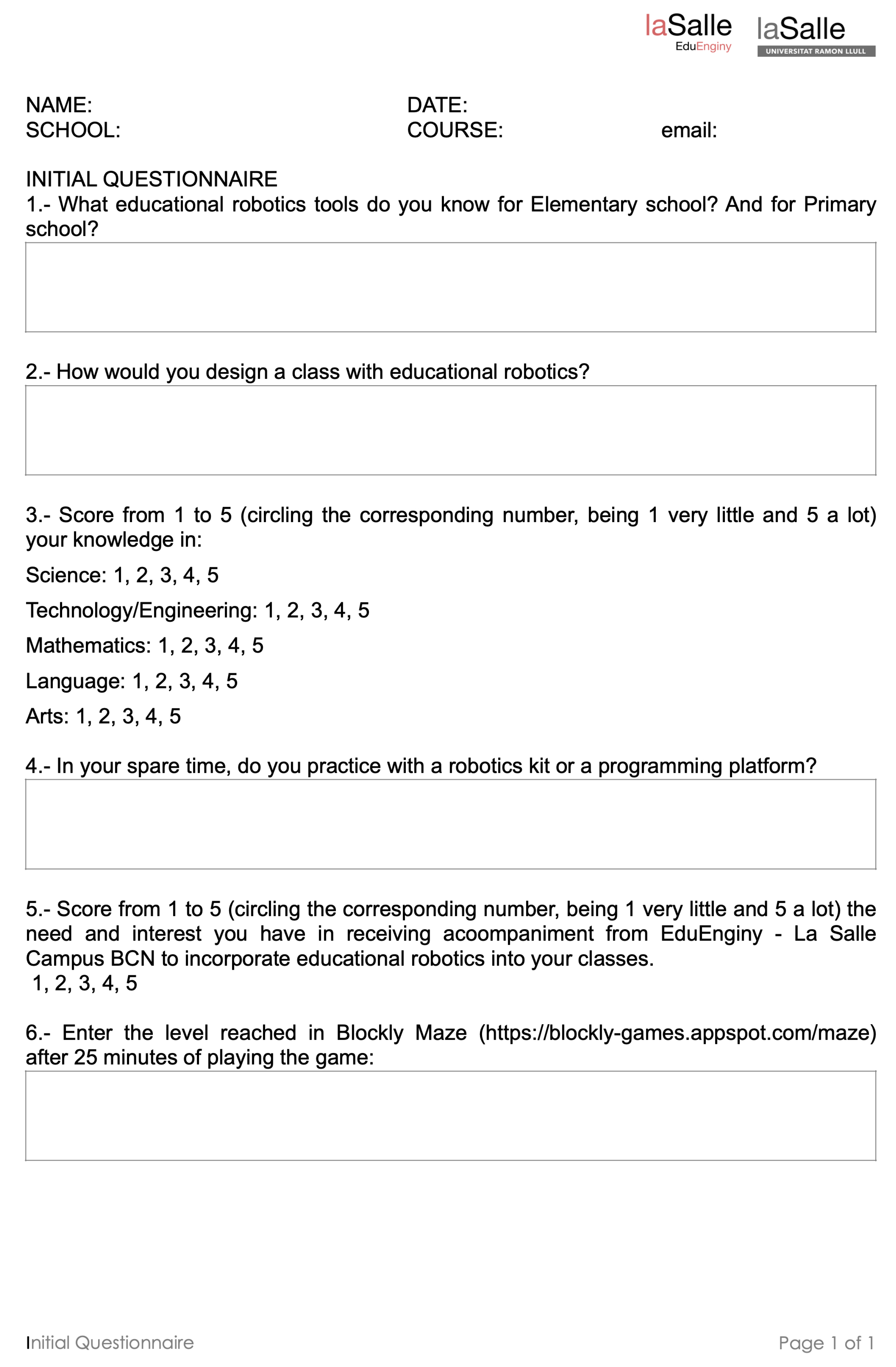
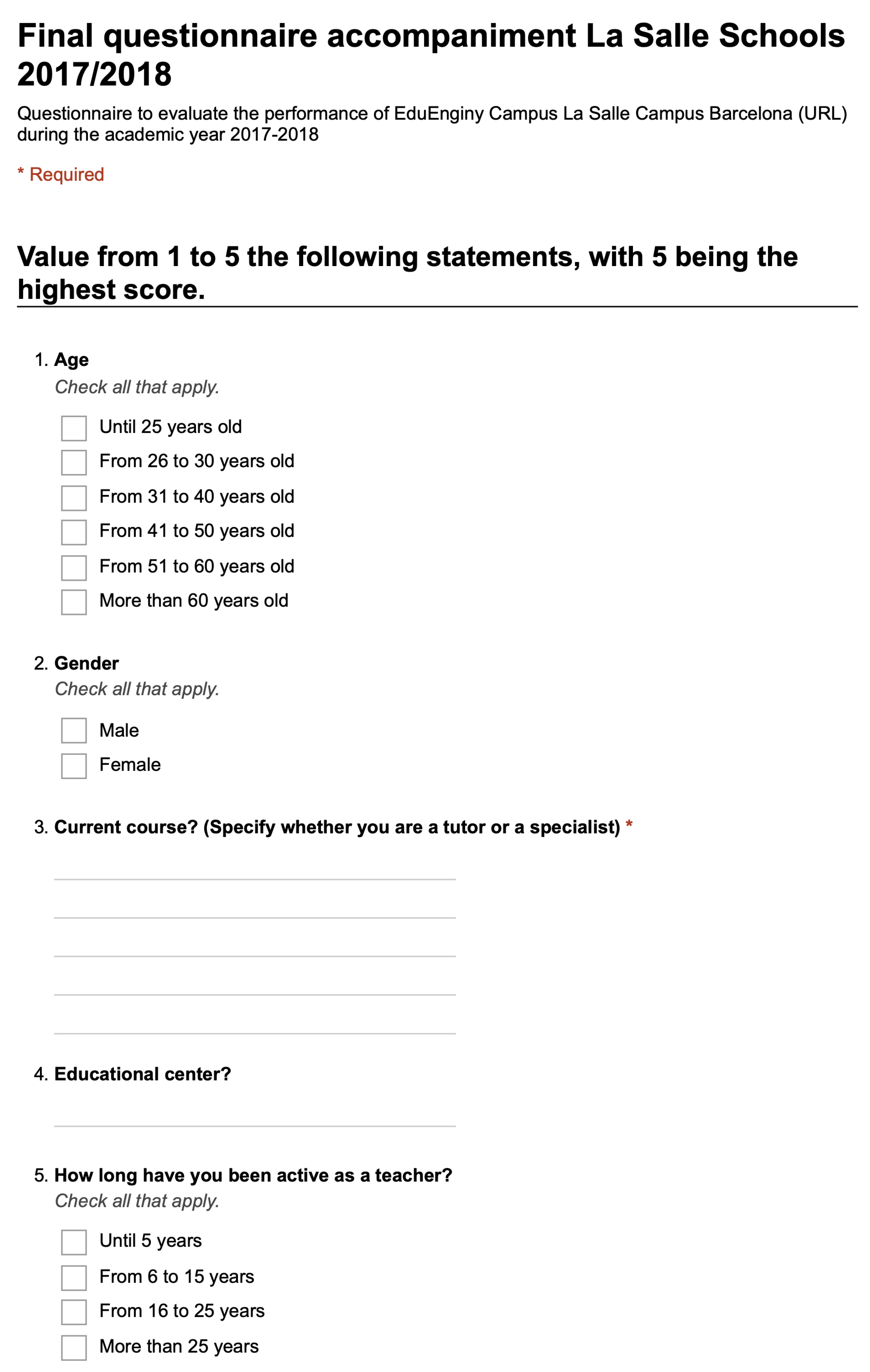
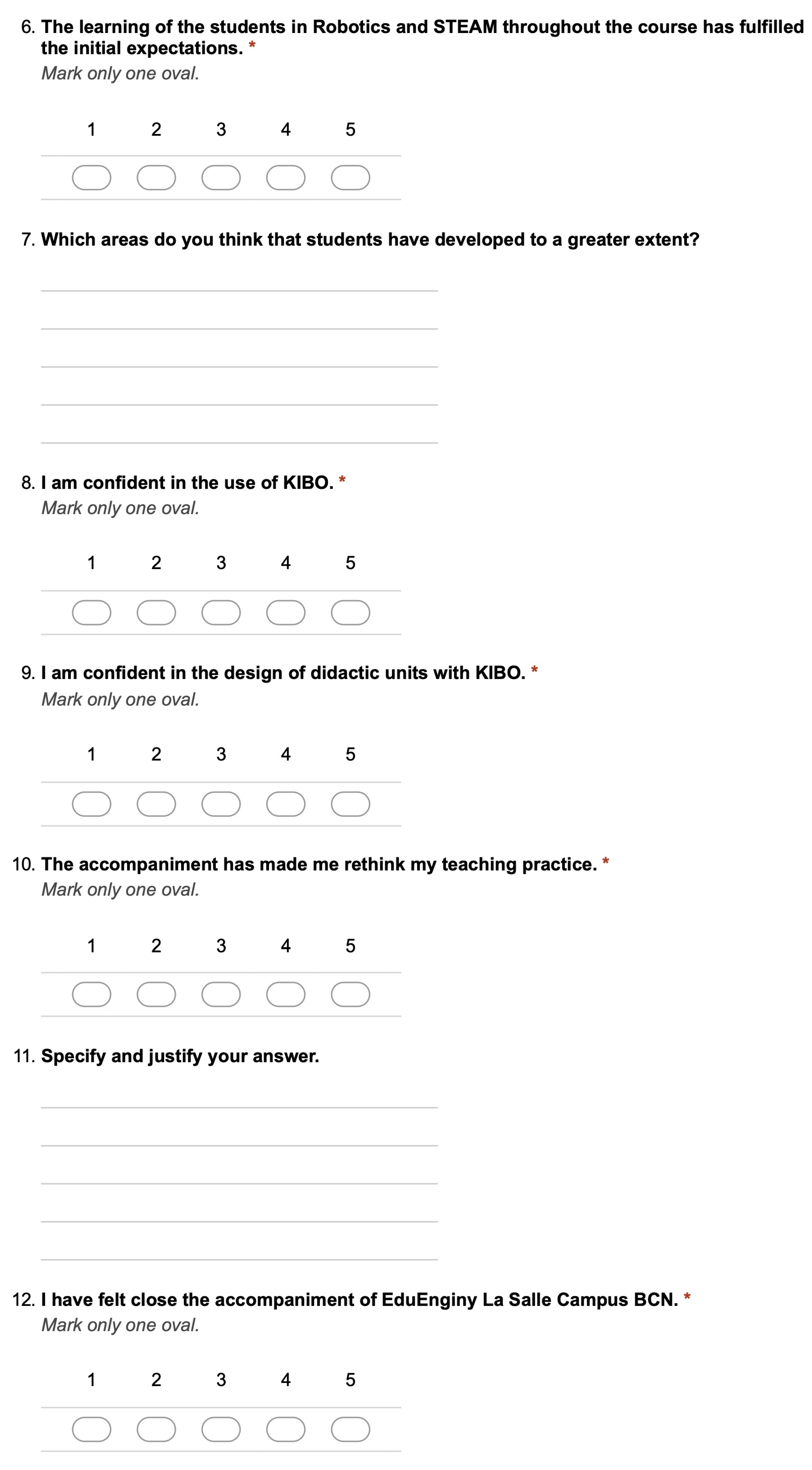
- Items to evaluate the teachers’ learning: Questionnaires for the teachers at the beginning and at the end of the training (initial and final questionnaires available in Appendix B and Appendix C), observations of the performance of the teachers during the sessions (based on observations of their enthusiasm and of their computational and pedagogical skills during the classroom support), an assessment of the session designed by each teacher at the end of the training, an interview with all the teachers at the end of the training, and evaluation of the remarks from the teachers in the post-class online support via instant messaging.
- Items to evaluate the students’ learning: Analysis of students’ learning assessments by means of a five-point likert-type scale with a list of evaluation criteria based on the PTD (Positive Technological development Engagement Checklist) [29], derived from the integration of ethical and psychosocial components into the cognitive components traditionally used in the evaluation of learning in areas of computer science and technology. We adapted the list of evaluation criteria into five categories: communication (CA1), collaboration (CA2), content creation (CA3), creativity (CA4), and choice of conduct (CA5) (each category is described in Appendix D), and each evaluation criterion had the same weight in the final grade. The students’ learning assessments took place at various control points throughout the course: an initial assessment based on the performance during the programmer’s game at session 3 and on the initial drawing of the robot at session 2, a mid-term individual test at session 10, and a final assessment of the robotic challenge using workstations at session 15.
3. Results and Discussion
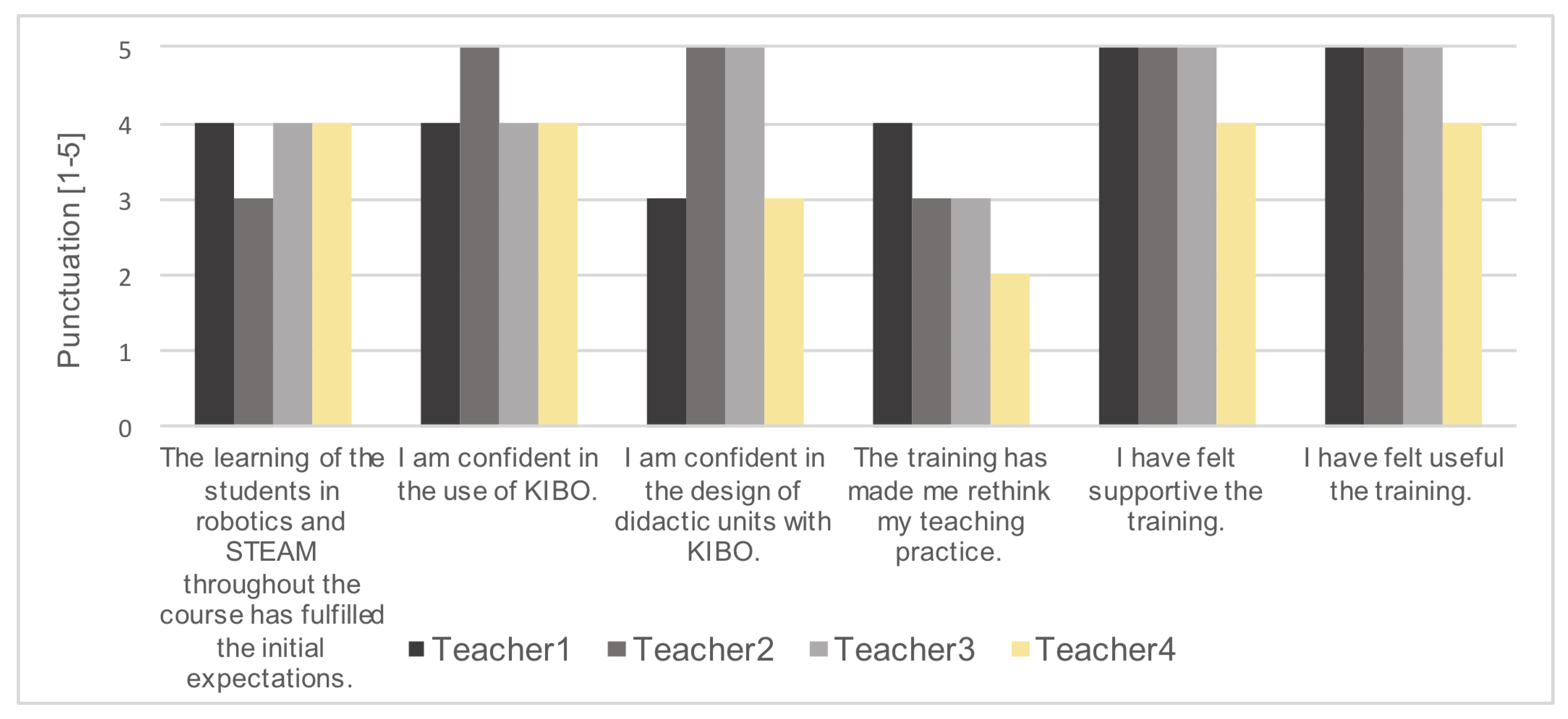
3.1. Teachers’ Learning
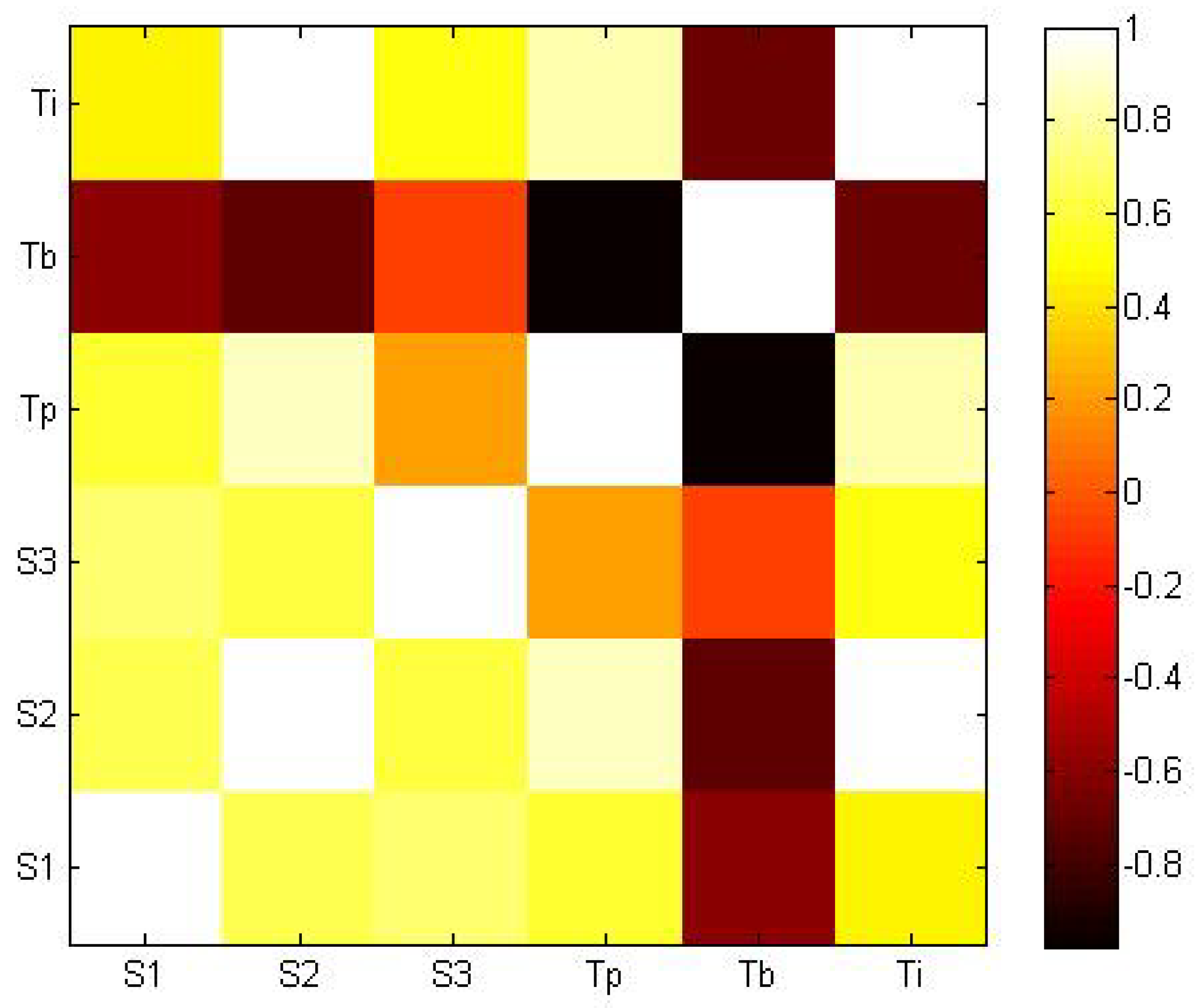
3.2. Students’ Learning
3.3. Future Directions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| STEAM | Interdisciplinary learning of Science, Technology, Engineering, Art, and Mathematics |
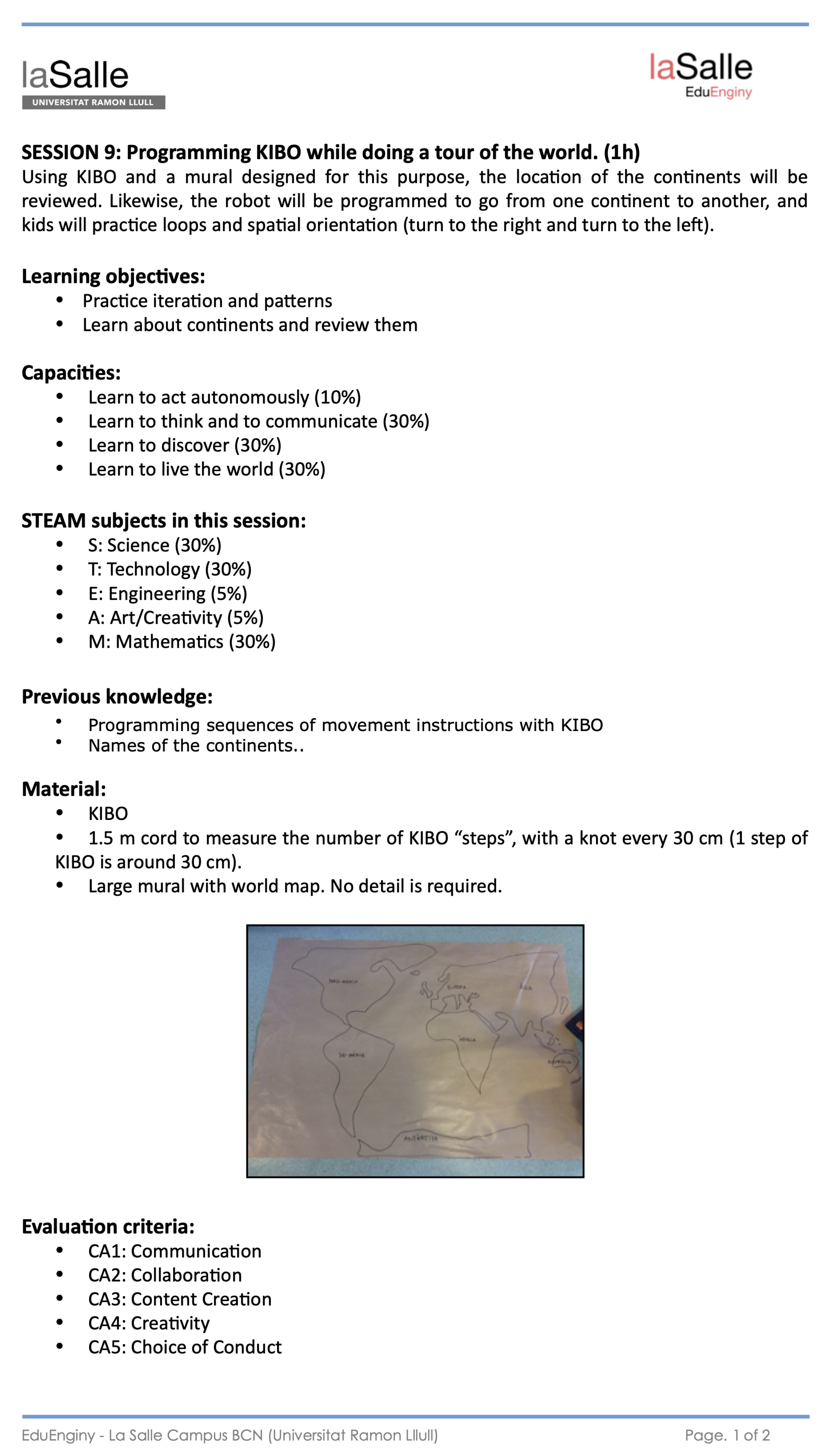
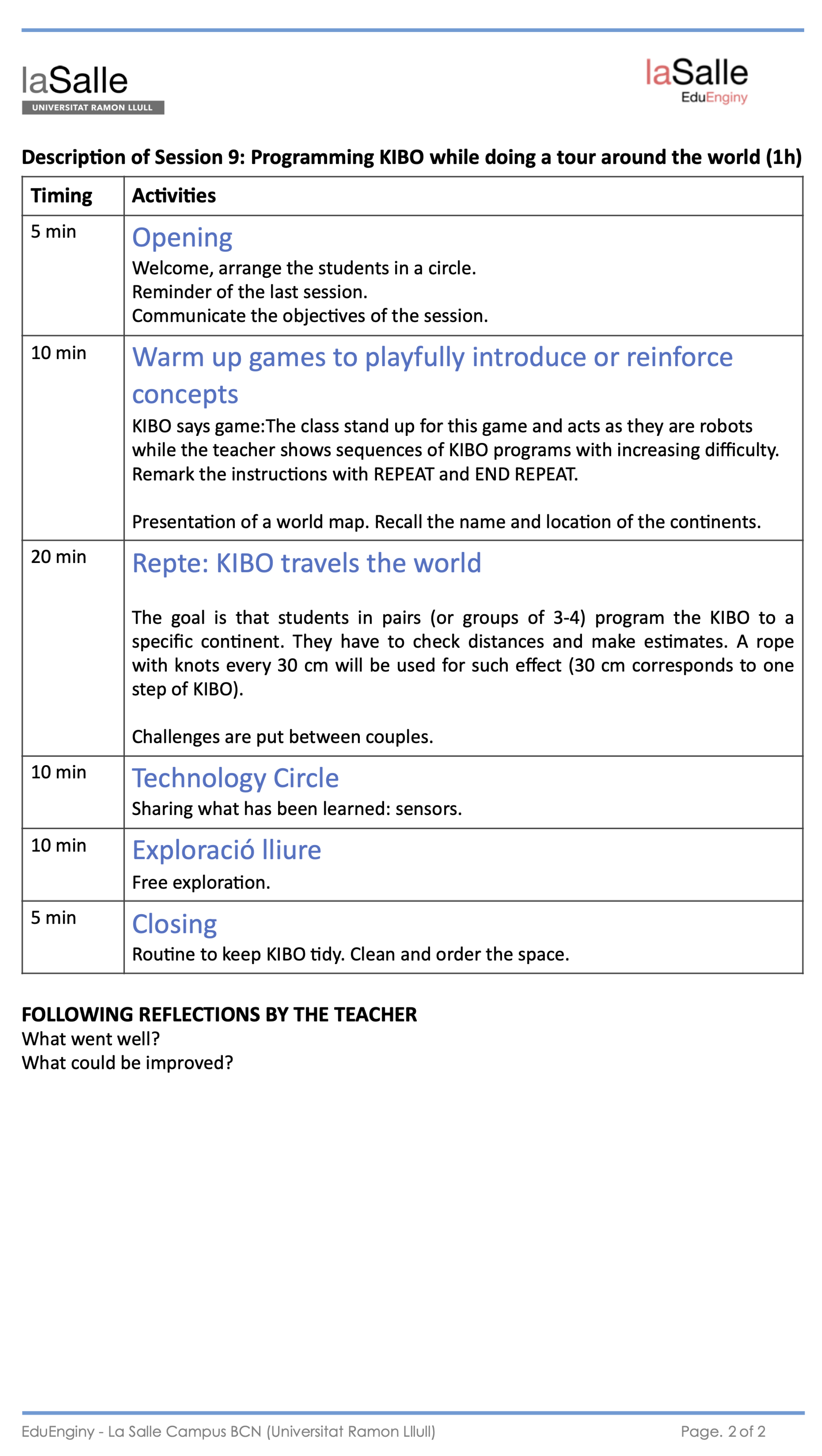
Appendix A. Details of a Sample Session of the Developed Curriculum and Web Link to the Full Curriculum


Appendix B. Initial Questionnaire for the Teachers

Appendix C. Final Questionnaire to the Teachers



Appendix D. Evaluation Criteria Used to Evaluate the Students’ Learning

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Criteria |
|---|
| Commmunication (CA1) |
| Exchanges ideas with others. |
| Feels comfortable seeking help and asking questions with peers and the teacher. |
| Collaboration (CA2) |
| Helps other students to understand materials. |
| Receives help from others and appreciates it. |
| Borrows or lends materials from/to one another. |
| Is working together with other students towards a common goal. |
| Content Creation (CA3) |
| Good process of engineering design and assembly. |
| Good development of computational thinking, can create a functional program for the robot/character. |
| Makes programs without “grammatical” errors. |
| Knows how to debug his/her program. |
| Persists in spite of obstacle or setbacks. |
| Creativity (CA4) |
| Uses a variety of materials (arts, crafts, etc.) or functions (e.g. adding a background and editing/making a character) |
| for his/her project.Uses technology in an unexpected way. |
| His/her project shows unique characteristics, i.e., it is different from everyone else’s. |
| Exhibits confidence and can initiate and complete a task with limited coaching. |
| Choice of Conduct (CA5) |
| Focuses on the activity and chooses to engage with it. |
| Follows classroom rules. |
| He/she is aware that his/her actions with the technology will have an impact on others. |
| Uses materials and resources responsibly. |
| Shows respectful behaviors to peers and teachers. |
| He/she is interested and enthusiastic about his/her project. |
References
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Bocconi, S.; Chioccariello, A.; Dettori, G.; Ferrari, A.; Engelhardt, K.; Kampylis, P.; Punie, Y. Developing Computational Thinking in Compulsory Education—Implications for Policy and Practice; Technical Report June; Joint Research Centre: Ispra, Italy; European Commission: Brussels, Belgium, 2016. [Google Scholar] [CrossRef]
- Hsu, T.C.; Chang, S.C.; Hung, Y.T. How to learn and how to teach computational thinking: Suggestions based on a review of the literature. Comput. Educ. 2018, 126, 296–310. [Google Scholar] [CrossRef]
- Mubin, O.; Stevens, C.J.; Shahid, S.; Mahmud, A.A.; Dong, J.J. A review of the applicability of robots in education. Technol. Educ. Learn. 2013, 1, 1–7. [Google Scholar] [CrossRef]
- Resnick, M. Technologies for Lifelong Kindergarten. Educ. Technol. Res. Dev. 1998, 46, 1–18. [Google Scholar] [CrossRef]
- Papavlasopoulou, S.; Giannakos, M.N.; Jaccheri, L. Empirical studies on the Maker Movement, a promising approach to learning: A literature review. Entertain. Comput. 2017, 18, 57–78. [Google Scholar] [CrossRef]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Lee, K.T.H.; Sullivan, A.; Bers, M.U. Collaboration by Design: Using Robotics to Foster Social Interaction in Kindergarten. Comput. Sch. 2013, 30, 271–281. [Google Scholar] [CrossRef]
- Albo-Canals, J.; Heerink, M.; Díaz-Boladeras, M.; Padillo, V.; Maristany, M.; Barco, A.; Angulo, C.; Riccio, A.; Brodsky, L.; Dufresne, S.; et al. Comparing Two Studies with LEGO Robotics-Based Activities in a Social Skills Training Program for Children with ASD; IEEE RO-MAN: Naples, Italy, 2013; pp. 638–643. [Google Scholar]
- Lye, S.Y.; Koh, J.H.L. Review on teaching and learning of computational thinking through programming: What is next for K-12? Comput. Human Behav. 2014, 41, 51–61. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms. Children, Computers and Powerful Ideas; Basic Books, Inc.: New York, NY, USA, 1980; pp. 1–223. [Google Scholar]
- Cejka, E.; Rogers, C.; Portsmore, M. Kindergarten Robotics: Using Robotics to Motivate Math, Science, and Engineering Literacy in Elementary School. Int. J. Eng. Educ. 2006, 22, 711–722. [Google Scholar]
- Mayer, R.E. Should There Be a Three-Strikes Rule against Pure Discovery Learning? The Case for Guided Methods of Instruction. Am. Psychol. 2004, 59, 14–19. [Google Scholar] [CrossRef] [PubMed]
- Kucuk, S.; Sisman, B. Behavioral patterns of elementary students and teachers in one-to-one robotics instruction. Comput. Educ. 2017, 111, 31–43. [Google Scholar] [CrossRef]
- González-González, C.S. State of the art in the teaching of computational thinking and programming in childhood education. Educ. Knowl. Soc. 2019, 20, 15. [Google Scholar] [CrossRef]
- Bers, M.U.; Flannery, L.; Kazakoff, E.R.; Sullivan, A. Computational thinking and tinkering: Exploration of an early childhood robotics curriculum. Comput. Educ. 2014, 72, 145–157. [Google Scholar] [CrossRef]
- Elkin, M.; Sullivan, A.; Bers, M.U. Implementing a Robotics Curriculum in an Early Childhood Montessori Classroom. J. Inf. Technol. Educ. Innov. Pract. 2014, 13, 153–169. [Google Scholar] [CrossRef]
- Khanlari, A. Teachers’ perceptions of the benefits and the challenges of integrating educational robots into primary/elementary curricula. Eur. J. Eng. Educ. 2015, 41, 320–330. [Google Scholar] [CrossRef]
- Sapounidis, T.; Stamovlasis, D.; Demetriadis, S. Latent Class Modeling of Children’s Preference Profiles on Tangible and Graphical Robot Programming. IEEE Trans. Educ. 2019, 62. [Google Scholar] [CrossRef]
- Saxena, A.; Lo, C.K.; Hew, K.F.; Wong, G.K.W. Designing Unplugged and Plugged Activities to Cultivate Computational Thinking: An Exploratory Study in Early Childhood Education. Asia-Pac. Educ. Res. 2020, 29, 55–66. [Google Scholar] [CrossRef]
- Mishra, P.; Koehler, M.J. Technological Pedagogical Content Knowledge: A Framework for Teacher Knowledge. Teach. Coll. Rec. 2006, 108, 1017–1054. [Google Scholar] [CrossRef]
- Egert, F.; Fukkink, R.G.; Eckhardt, A.G. Impact of In-Service Professional Development Programs for Early Childhood Teachers on Quality Ratings and Child Outcomes: A Meta-Analysis. Rev. Educ. Res. 2018, 88, 401–433. [Google Scholar] [CrossRef]
- Giamellaro, M.; Siegel, D.R. Coaching teachers to implement innovations in STEM. Teach. Teach. Educ. 2018, 76, 25–38. [Google Scholar] [CrossRef]
- Jurado, E. Aprenentatge STEAM Social en Edats Primerenques amb Plataformes Robotiques; II Simp. Sobre Innov. Pedagog. i Noves Tecnol. La Salle Campus: Barcelona, Spain, 2017; pp. 39–43. [Google Scholar]
- Sullivan, A.; Elkin, M.; Bers, M.U. KIBO Robot Demo: Engaging Young Children in Programming and Engineering. In Proceedings of the 14th International Conference on Interaction Design and Children, Medford, MA, USA, 21–25 June 2015; pp. 418–421. [Google Scholar] [CrossRef]
- Sullivan, A.; Bers, M.U. Robotics in the early childhood classroom: Learning outcomes from an 8-week robotics curriculum in pre-kindergarten through second grade. Int. J. Technol. Des. Educ. 2016, 26, 3–20. [Google Scholar] [CrossRef]
- Sapounidis, T.; Demetriadis, S. Educational robots driven by tangible programming languages: A review on the field. Adv. Intell. Syst. Comput. 2017, 560. [Google Scholar] [CrossRef]
- Umam, M.U.K.; Budiyanto, C.; Rahmawati, A. Literature review of robotics learning devices to facilitate the development of computational thinking in early childhood. AIP Conf. Proc. 2019, 2194. [Google Scholar] [CrossRef]
- Bers, M.U. The TangibleK Robotics Program: Applied Computational Thinking for Young Children. Early Child. Res. Pract. 2010, 12, 1–20. [Google Scholar]
- Fonseca, D.; Navarro, I.; de Renteria, I.; Moreira, F.; Ferrer, Á.; de Reina, O. Assessment of Wearable Virtual Reality Technology for Visiting World Heritage Buildings: An Educational Approach. J. Educ. Comput. Res. 2018, 56, 940–973. [Google Scholar] [CrossRef]
- Generalitat de Catalunya, Departament d’Educació. Orientacions per a L’avaluació. Educació Infantil. Segon Cicle; Technical report; Generalitat de Catalunya: Barcelona, Spain, 2020.
- Thibaut, L.; Knipprath, H.; Dehaene, W.; Depaepe, F. The influence of teachers’ attitudes and school context on instructional practices in integrated STEM education. Teach. Teach. Educ. 2018, 71, 190–205. [Google Scholar] [CrossRef]




| Session | Description | STEAM Contents |
|---|---|---|
| S1 | Presentation of KIBO. What is a robot? Presentation of the KIBO robot. Students will become familiar with the robot and explore the different parts. In addition, students will play a kinesthetic game to understand that robots are made up of three basic parts (sensors, processor, and actuators). | Technology, Engineering |
| S2 | A drawing of KIBO. What are the rules to take care of the robot? In this session students will make a drawing of KIBO, differentiating sensors, processor, and actuator with different markers. This session will also introduce the rules for taking care of KIBO. | Technology, Engineering, Arts |
| S3 | The robot moves. What is an instruction? What is a program? Through psychomotor skills, students will work on movement sequences and on computational concepts such as sequence, beginning, end, and instruction. Children will program KIBO to represent the movements of an animal. The concept of program will be introduced as a set of instructions. | Science, Technology |
| S4 | I have a robot at home. Review what an instruction and program is. Students will work with the computational concepts introduced in the previous session: sequence, start, end, and instruction. In addition, the KIBO will be contextualized at home, doing something more typical of people: sleeping, bathing, etc. An attempt will be made to translate the drawn action into a series of instructions. | Technology |
| S5 | The parking of KIBO I. What is an engineer? How do we plan a parking lot for KIBO? The goal of this session is to learn what an engineer is and to do the first steps in building a parking lot for the KIBO. A process similar to engineering design will be followed, with the sequence of imagining, creating, testing, and sharing. | Technology, Engineering, Arts |
| S6 | The parking of KIBO II. How do we create a parking lot for KIBO? What programming do we give to KIBO to park it? In this session, the car park for the KIBO will be completed and students will program the KIBO to park it under the parking lots they constructed. | Technology, Engineering, Arts |
| S7 | We make patterns. What is an iteration? Students will construct geometric figures and will make patterns. | Arts, Maths. |
| S8 | KIBO practices patterns and iteration with geometric shapes. In this session, the geometric figures created in the previous session will be used. The students will generate patterns on the floor with geometric figures and KIBO will follow them. | Technology, Maths. |
| S9 | Programming KIBO while doing a tour of the world. Using KIBO and a mural designed for this purpose, the location of the continents will be reviewed. Likewise, the robot will be programmed to go from one continent to another, and kids will practice loops and spatial orientation. | Science, Technology |
| S10 | Student evaluations. There will be a test to evaluate individually the learning of students in the programming of KIBO. | Technology. |
| S11 | What are the sensors? The KIBO responds to claps. In this session, students will learn what the sensors are and how they feel to their senses. The ear of the KIBO, which has a sound sensor, and the associated instruction “Wait for Clap" will be used. The instruction “Wait for Clap" will be used to make the robot turn around by itself. | Science, Technology |
| S12 | Travelling words after clapping. Students will program the robot to chain letters in a grid, forming the desired words and using the ear sensor. | Technology (+ Language) |
| S13 | Let us lighten the KIBO. Telescope sensor, conditional. This session explains the use of conditionals by programming the telescope sensor, which distinguishes far and near. In addition, the instruction of the white, blue, and red light bulbs is introduced. | Technology |
| S14 | Decorate the hat of the KIBO. In this session, students will design a hat for the KIBO with recycled material. The KIBO will be programmed to go around following a background music. | Technology, Engineering, Arts |
| S15 | Individual assessments using workstations. By using corners in the classroom, students will perform various tasks: draw the KIBO, program and assemble the KIBO to achieve a small challenge, free programming, and free assembly. | Technology, Engineering, Arts. |
| S16 | Session designed by the teacher. | Science, Technology, Engineering, Arts, Maths |
| Students’ Group | School | Teacher | Test S10 | Final PTD Evaluation Criteria | Increase (Final PTD-Initial PTD) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CA1 | CA2 | CA3 | CA4 | CA5 | CA1 | CA2 | CA3 | CA4 | CA5 | ||||
| 1 | 1 | Teacher1 | 8.3 | 7.1 | 7.0 | 7.3 | 7.4 | 8.3 | 0.7 | 0.6 | 0.5 | 0.7 | 1.5 |
| 2 | 1 | Teacher2 | 3.9 | 5.9 | 5.8 | 6.0 | 5.8 | 7.2 | −0.2 | −0.5 | 0.1 | −0.2 | 0.1 |
| 3 | 2 | Teacher3 | 7.4 | 6.3 | 6.6 | 6.6 | 6.5 | 6.7 | −0.4 | 0.4 | −0.2 | −0.3 | −0.3 |
| 4 | 3 | Teacher4 | 6.3 | 8.1 | 7.7 | 8.0 | 8.4 | 8.1 | 0.1 | −0.4 | 0.0 | 0.4 | −0.1 |
| 5 | 3 | Teacher4 | 8.0 | 8.5 | 8.3 | 8.3 | 7.8 | 8.1 | 0.0 | 0.2 | 0.0 | 0.0 | 0.3 |
| AVERAGE | 6.8 | 7.2 | 7.1 | 7.2 | 7.2 | 7.7 | 0.1 | 0.1 | 0.1 | 0.1 | 0.3 | ||
| AVERAGE Q1 | 5.6 | 5.9 | 5.8 | 6.4 | 6.9 | 7.5 | −0.7 | −0.4 | 0.2 | 0.7 | 0.9 | ||
| AVERAGE Q3 | 9.0 | 8.0 | 8.1 | 8.1 | 8.3 | 8.4 | 0.2 | 0.3 | −0.3 | 0.2 | 0.0 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jurado, E.; Fonseca, D.; Coderch, J.; Canaleta, X. Social STEAM Learning at an Early Age with Robotic Platforms: A Case Study in Four Schools in Spain. Sensors 2020, 20, 3698. https://doi.org/10.3390/s20133698
Jurado E, Fonseca D, Coderch J, Canaleta X. Social STEAM Learning at an Early Age with Robotic Platforms: A Case Study in Four Schools in Spain. Sensors. 2020; 20(13):3698. https://doi.org/10.3390/s20133698
Chicago/Turabian StyleJurado, Elena, David Fonseca, Jorge Coderch, and Xavi Canaleta. 2020. "Social STEAM Learning at an Early Age with Robotic Platforms: A Case Study in Four Schools in Spain" Sensors 20, no. 13: 3698. https://doi.org/10.3390/s20133698
APA StyleJurado, E., Fonseca, D., Coderch, J., & Canaleta, X. (2020). Social STEAM Learning at an Early Age with Robotic Platforms: A Case Study in Four Schools in Spain. Sensors, 20(13), 3698. https://doi.org/10.3390/s20133698