Dependent-Gaussian-Process-Based Learning of Joint Torques Using Wearable Smart Shoes for Exoskeleton

Abstract
1. Introduction
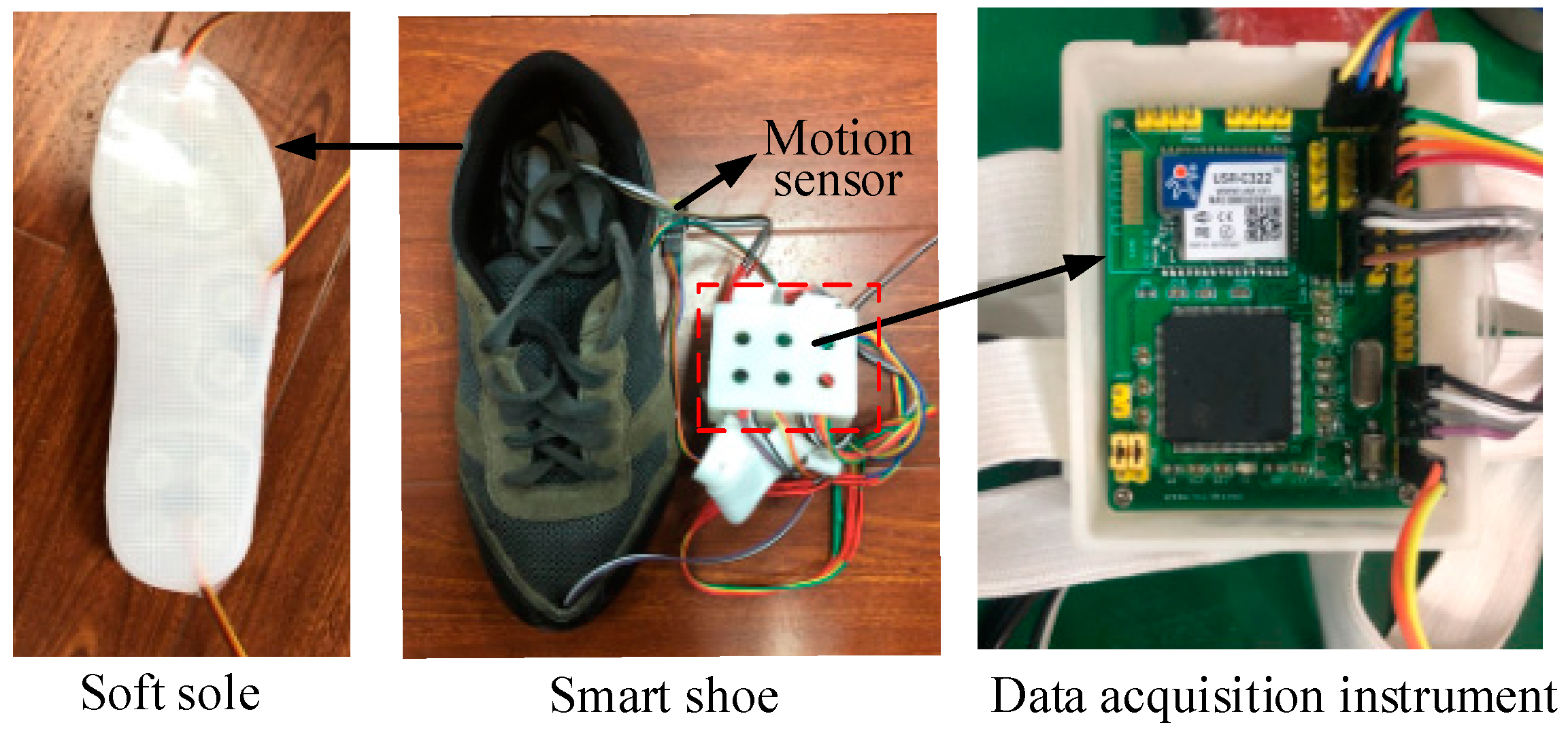
- A soft smart shoe that is low-cost, nonintrusive for human gait, and comfortable to wearers was designed to acquire the information concerning GRF and foot motion.
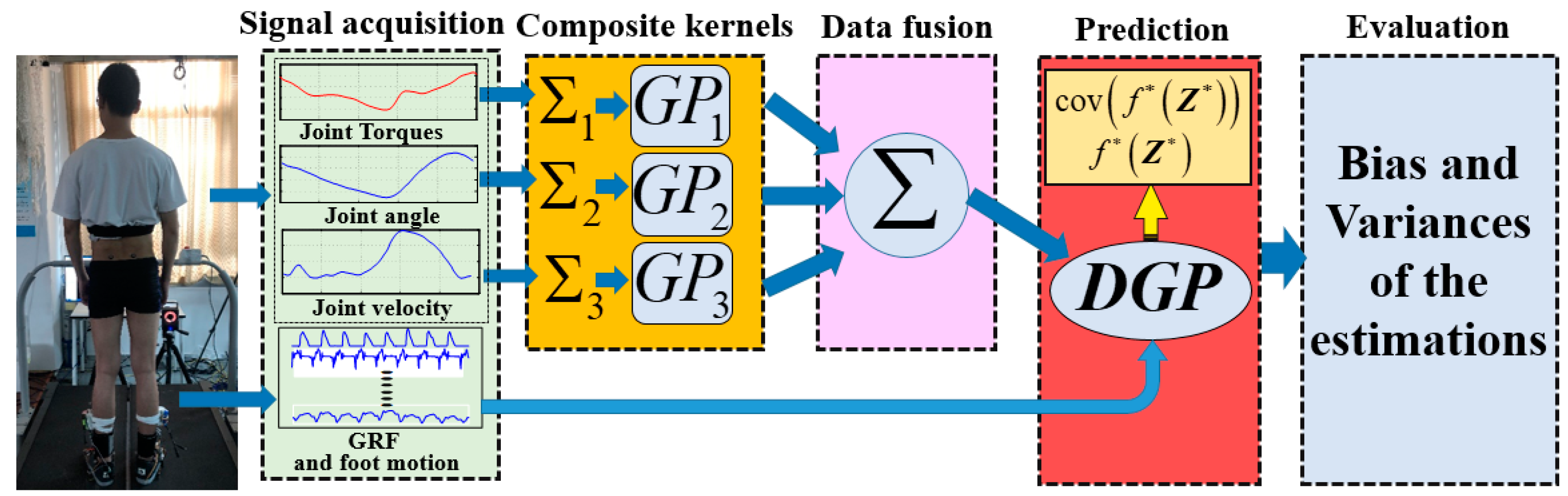
- The DGP was performed to fuse the joint kinematics and joint torques with measurements from smart shoes as the inputs. As joint kinematics are only used in the training phase, and it does not need information on joint kinematics in the prediction process, the proposed method could realize accurate estimations in outdoor activities by using only the smart shoe.
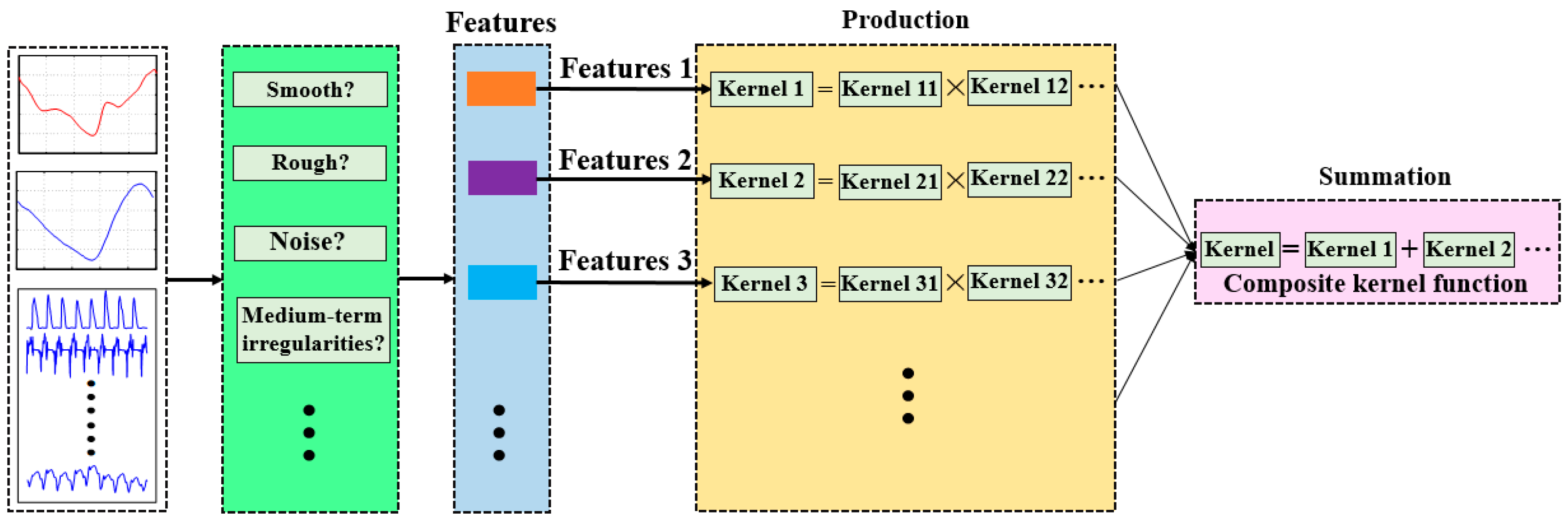
- The designed composite covariance kernel function could achieve multiple-feature modeling at different scales, and cope with the temporal evolution of the human gait. Hence, the proposed model could extract time-varying gait patterns that were deeply embedded in the data, offering superior performance. In addition, it enabled generalized joint-torque estimations for different input types.
2. Materials and Methods
2.1. Wearable Smart Shoes
2.2. DGP-Based Torque Estimation in Human Gait
| Algorithm 1 Basic steps of DGP for estimations. |
| Input: Y = [y1 y2] (training input) X = [x1 x2] (training target) |
| (covariance function) X✴ (test input) |
| maxLength (maximal length of training set) |
| Repeat: |
| Step 1: If prediction results meet critical Criteria (12). |
| if length of S ≤ maxLength |
| Added new training data Xn+1/Yn+1 to training set S. Return S. |
| else |
| Reconstruct composite covariance function until desired accuracy is reached. Return the composite covariance function. |
| Step 2: Training hyperparameters (Equation (13)). |
| Step 3: Update covariance matrix (Equation (6)). |
| Step 4: Prediction with new trained hyperparameters (Equation (5)). |
| End |
| Step 5: Return (mean) and (variance). |
2.3. Design Methodology of Kernel Function
3. Experiment Study
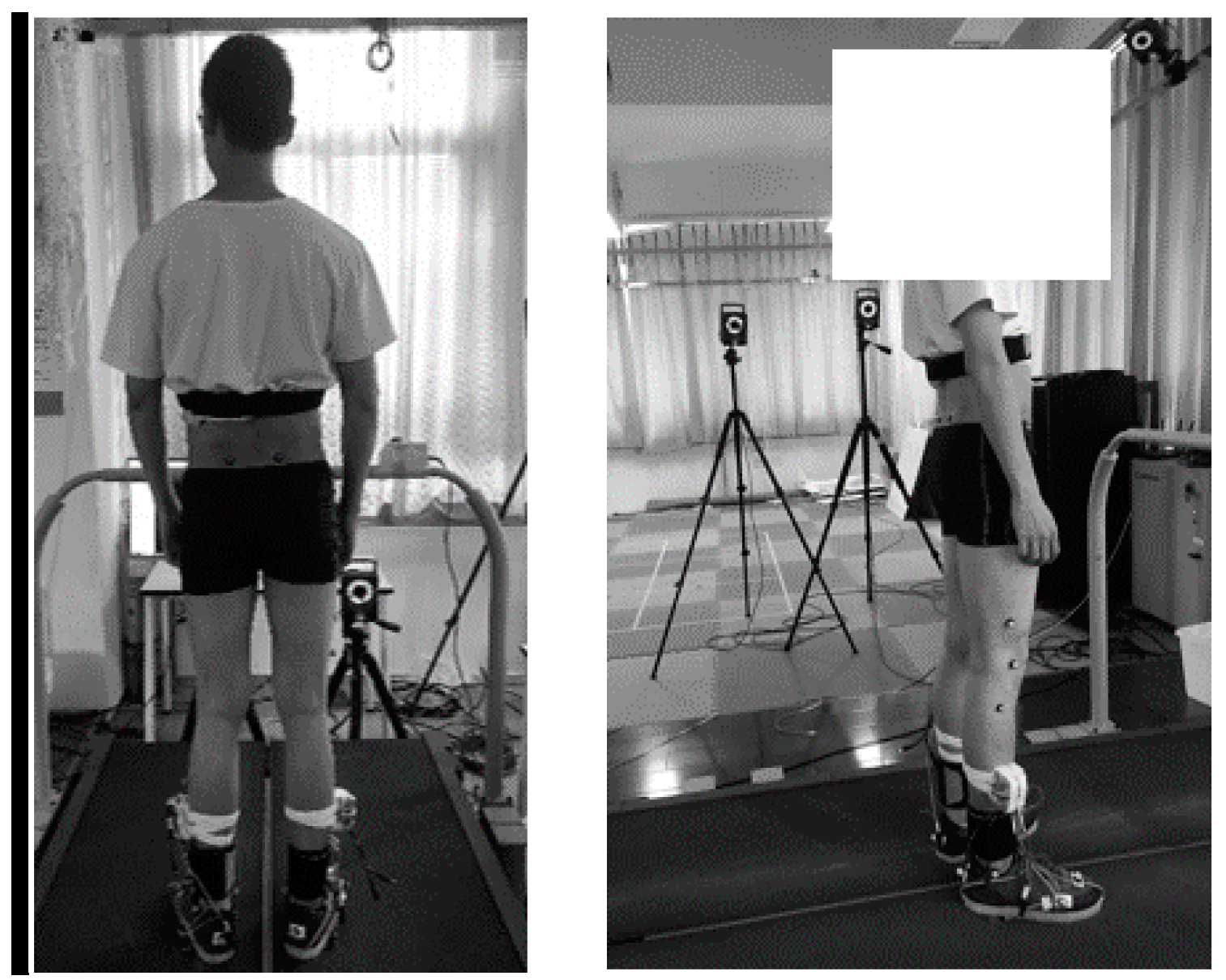
3.1. Subjects
3.2. Experiment Protocol
3.3. Data Processing
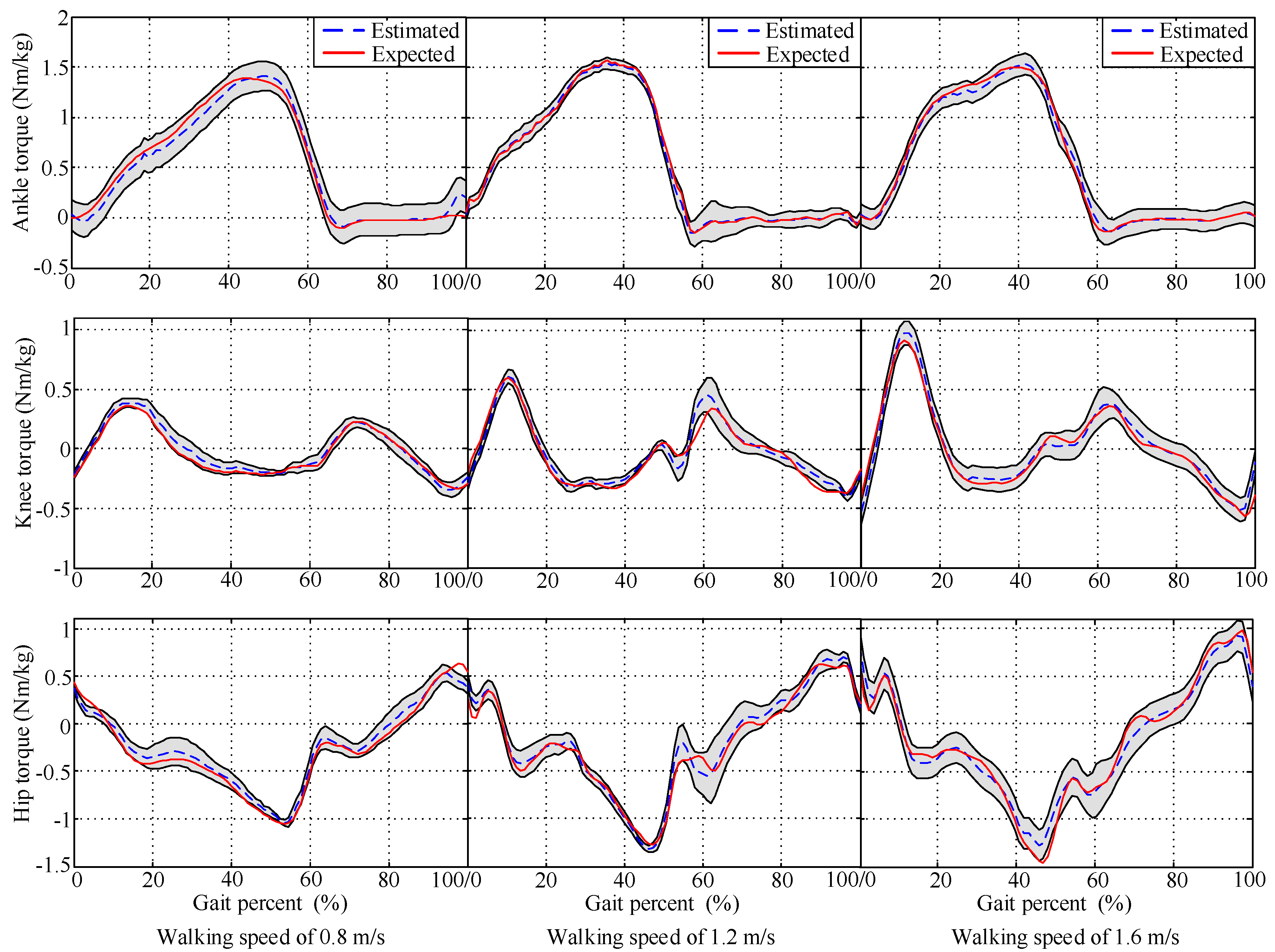
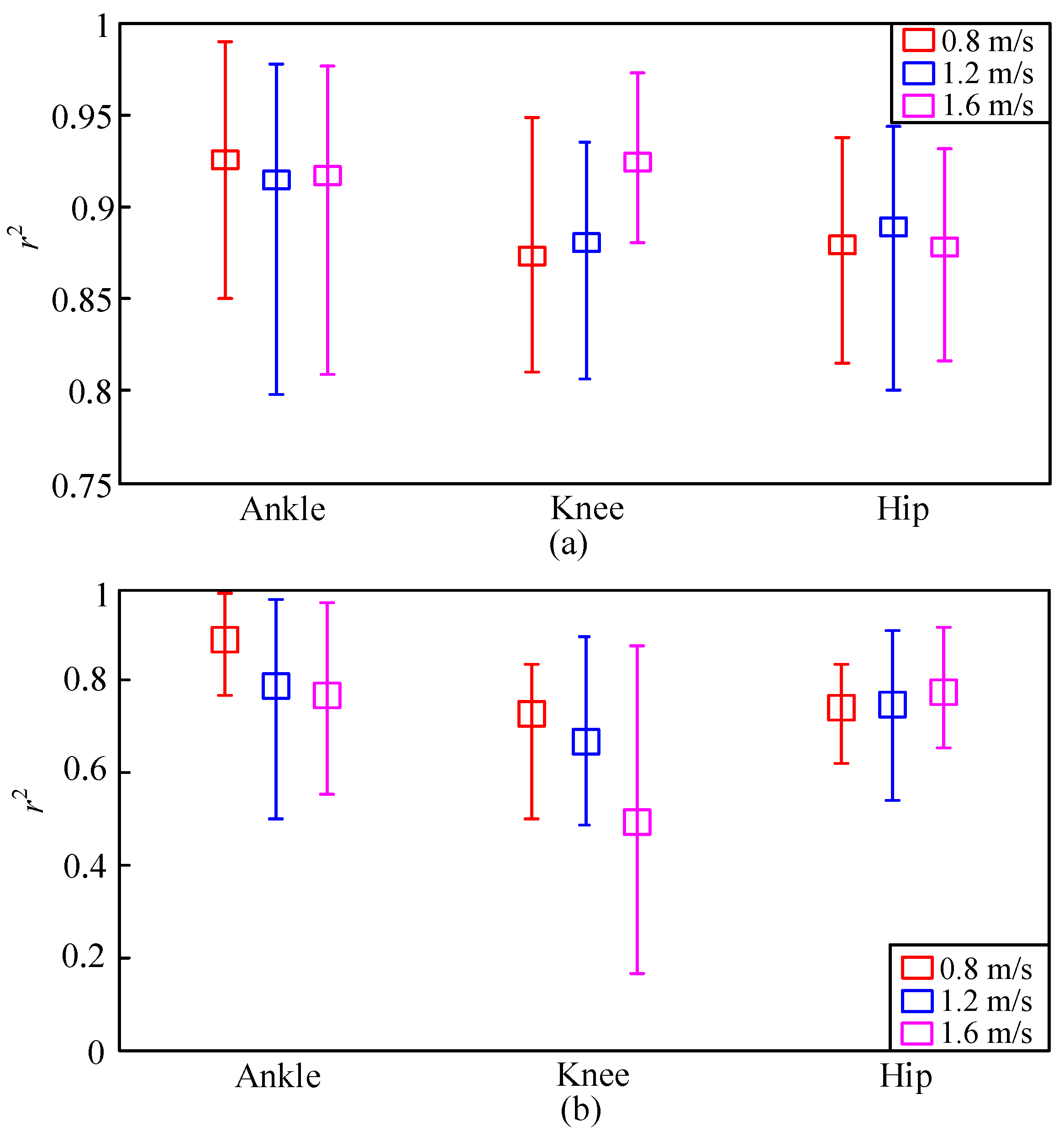
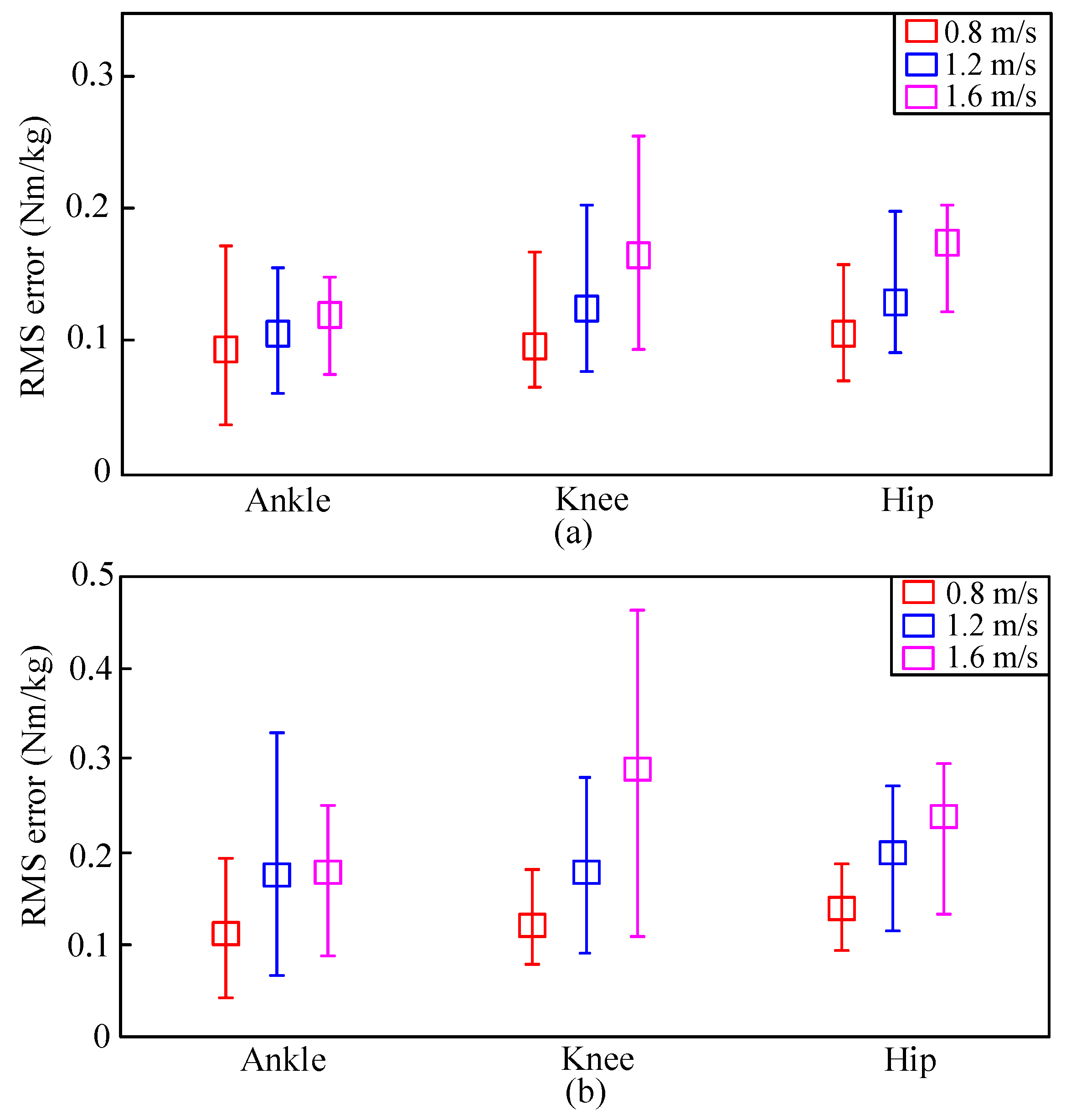
4. Results
4.1. DGP Algorithm Validity
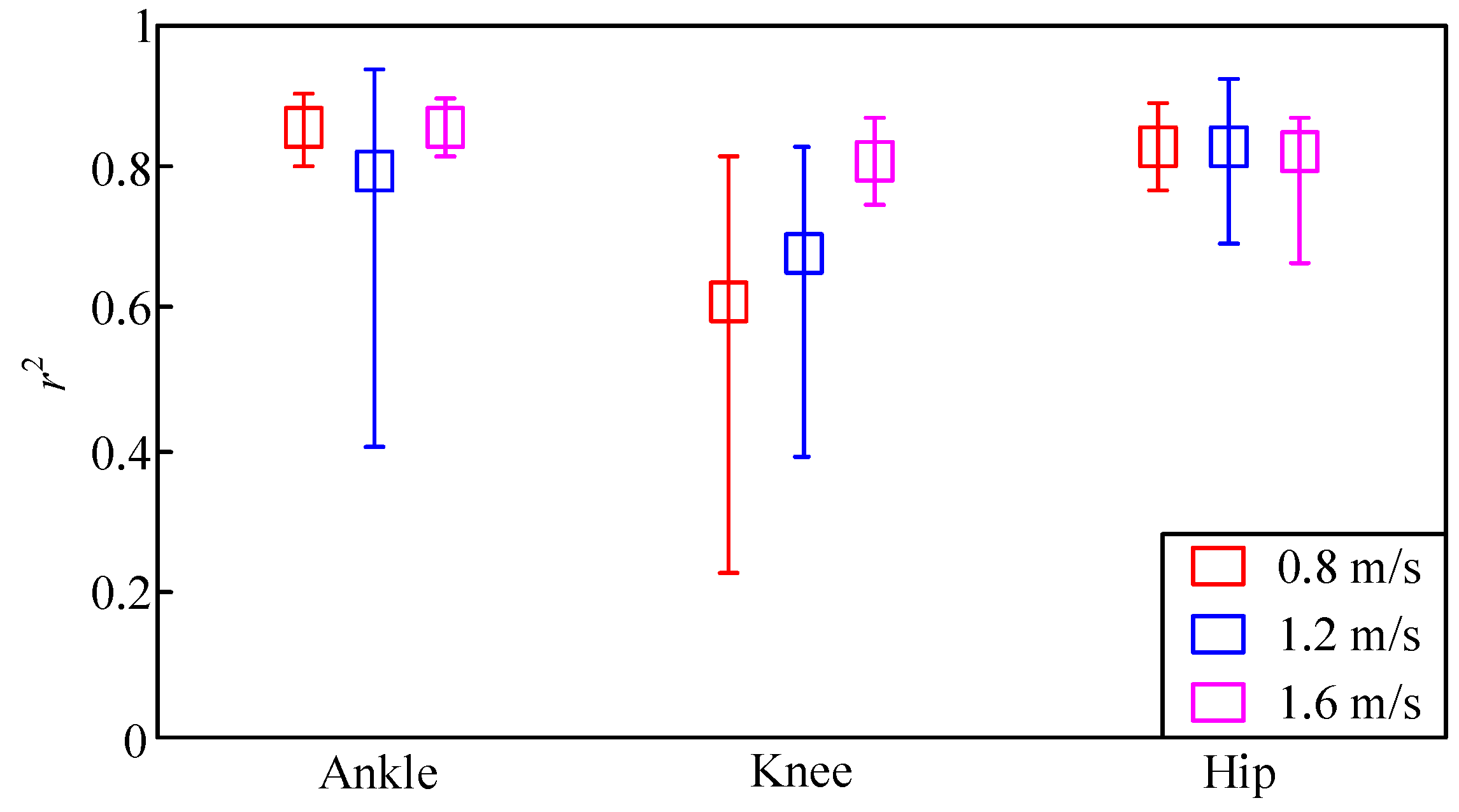
4.2. Further Investigations
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shamaei, K.; Cenciarini, M.; Dollar, A.M. On the mechanics of the ankle in the stance phase of the gait. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2011; Volume 2011, pp. 8135–8140. [Google Scholar]
- Chen, X.; Zeng, Y.; Yin, Y. Improving the Transparency of an Exoskeleton Knee Joint Based on the Understanding of Motor Intent Using Energy Kernel Method of EMG. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 577–588. [Google Scholar] [CrossRef] [PubMed]
- Losey, D.P.; McDonald, C.G.; Battaglia, E.; O’Malley, M.K. A Review of Intent Detection, Arbitration, and Communication Aspects of Shared Control for Physical Human–Robot Interaction. Appl. Mech. Rev. 2018, 70, 010804. [Google Scholar] [CrossRef]
- Park, J.S.; Lee, C.M.; Koo, S.-M.; Kim, C.H. Gait Phase Detection Using Force Sensing Resistors. IEEE Sens. J. 2020, 20, 6516–6523. [Google Scholar] [CrossRef]
- Wang, L. Recognition of Human Activities Using Continuous Autoencoders with Wearable Sensors. Sensors 2016, 16, 189. [Google Scholar] [CrossRef]
- Jung, J.Y.; Heo, W.; Yang, H.; Park, H. A Neural Network-Based Gait Phase Classification Method Using Sensors Equipped on Lower Limb Exoskeleton Robots. Sensors 2015, 15, 27738–27759. [Google Scholar] [CrossRef]
- Au, S.; Berniker, M.; Herr, H. 2008 Special Issue: Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Netw. 2008, 21, 654–666. [Google Scholar] [CrossRef]
- Eslamy, M.; Alipour, K. Synergy-Based Gaussian Process Estimation of Ankle Angle and Torque: Conceptualization for High Level Controlling of Active Robotic Foot Prostheses/Orthoses. J. Biomech. Eng. 2018, 141, 021002. [Google Scholar] [CrossRef]
- Thatte, N.; Shah, T.; Geyer, H. Robust and Adaptive Lower Limb Prosthesis Stance Control via Extended Kalman Filter-Based Gait Phase Estimation. IEEE Robot. Autom. Lett. 2019, 4, 3129–3136. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.-J.; Wang, W.-D.; Dong, W. Human motion intent learning based motion assistance control for a wearable exoskeleton. Robot. Comput. Manuf. 2018, 49, 317–327. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef]
- Awad, L.N.; Bae, J.; O’Donnell, K.; De Rossi, S.M.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D.; et al. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9, eaai9084. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Liu, T.; Yi, J. A Wearable Sensing and Training System: Towards Gait Rehabilitation for Elderly Patients with Knee Osteoarthritis. IEEE Sens. J. 2019, 19, 5936–5945. [Google Scholar] [CrossRef]
- Sartori, M.; Reggiani, M.; Farina, D.; Lloyd, D. EMG-Driven Forward-Dynamic Estimation of Muscle Force and Joint Moment about Multiple Degrees of Freedom in the Human Lower Extremity. PLoS ONE 2012, 7, e52618. [Google Scholar] [CrossRef] [PubMed]
- Rajagopal, A.; Dembia, C.; Demers, M.; Delp, D.D.; Hicks, J.L.; Delp, S.L. Full-Body Musculoskeletal Model for Muscle-Driven Simulation of Human Gait. IEEE Trans. Biomed. Eng. 2016, 63, 2068–2079. [Google Scholar] [CrossRef]
- Ao, D.; Song, R.; Gao, J. Movement Performance of Human–Robot Cooperation Control Based on EMG-Driven Hill-Type and Proportional Models for an Ankle Power-Assist Exoskeleton Robot. IEEE Trans. Neural Syst. Rehab. Eng. 2017, 25, 1125–1134. [Google Scholar] [CrossRef]
- Zeng, Y.; Yang, J.; Yin, Y. Gaussian Process-Integrated State Space Model for Continuous Joint Angle Prediction from EMG and Interactive Force in a Human-Exoskeleton System. Appl. Sci. 2019, 9, 1711. [Google Scholar] [CrossRef]
- Chen, X.; Yin, Y.H. A highly efficient semiphenomenological model of a half-sarcomere for real-time prediction of mechanical behavior. J. Biomech. Eng. 2014, 136. [Google Scholar] [CrossRef]
- Gui, K.; Liu, H.; Zhang, D. A Practical and Adaptive Method to Achieve EMG-Based Torque Estimation for a Robotic Exoskeleton. IEEE/ASME Trans. Mechatron. 2019, 24, 483–494. [Google Scholar] [CrossRef]
- Li, G.; Liu, T.; Yi, J.; Wang, H.; Li, J.; Inoue, Y. The Lower Limbs Kinematics Analysis by Wearable Sensor Shoes. IEEE Sens. J. 2016, 16, 2627–2638. [Google Scholar] [CrossRef]
- Robertson, D.G.E.; Caldwell, G.E.; Hamill, J.; Kamen, G.; Whittlesey, S.N. Research Methods in Biomechanics; Human Kinetics Publishers: Windsor, ON, Canada, 2014. [Google Scholar]
- Jacobs, D.A.; Ferris, D.P. Estimation of ground reaction forces and ankle moment with multiple, low-cost sensors. J. Neuroeng. Rehabil. 2015, 12, 90. [Google Scholar] [CrossRef]
- Zeng, Y.; Yang, J.; Peng, C.; Yin, Y. Evolving Gaussian Process Autoregression Based Learning of Human Motion Intent Using Improved Energy Kernel Method of EMG. IEEE Trans. Biomed. Eng. 2019, 66, 2556–2565. [Google Scholar] [CrossRef] [PubMed]
- Vasudevan, S. Data fusion with Gaussian processes. Robot. Auton. Syst. 2012, 60, 1528–1544. [Google Scholar] [CrossRef]
- Yin, Y.; Ren, M.J.; Sun, L. Dependant Gaussian processes regression for intelligent sampling of freeform and structured surfaces. CIRP Ann. 2017, 66, 511–514. [Google Scholar] [CrossRef]
- Boyle, P.; Frean, M. Dependent Gaussian Processes. In Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2004; pp. 217–224. [Google Scholar]
- Ren, M.J.; Cheung, C.F.; Xiao, G. Gaussian Process Based Bayesian Inference System for Intelligent Surface Measurement. Sensors 2018, 18, 4069. [Google Scholar] [CrossRef]
- Li, G.; Liu, T.; Yi, J. Wearable Sensor System for Detecting Gait Parameters of Abnormal Gaits: A Feasibility Study. IEEE Sens. J. 2018, 18, 4234–4241. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; The MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Sun, L.; Ren, M.; Yin, Y. Domain-specific Gaussian process-based intelligent sampling for inspection planning of complex surfaces. Int. J. Prod. Res. 2017, 55, 5564–5578. [Google Scholar] [CrossRef]
- Razak, A.H.A.; Zayegh, A.; Begg, R.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef]
- Potluri, S.; Chandran, A.B.; Diedrich, C.; Schega, L. Machine Learning based Human Gait Segmentation with Wearable Sensor Platform. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; Volume 2019, pp. 588–594. [Google Scholar]
- Kocijan, J. Modelling and Control of Dynamic Systems Using Gaussian Process Models. In Practical Control of Electric Machines; Springer Science and Business Media LLC: Berlin, Germany, 2016. [Google Scholar]
- Duvenaud, D.; Lloyd, J.R.; Grosse, R.; Tenenbaum, J.B.; Ghahramani, Z. Structure Discovery in Nonparametric Regression through Compositional Kernel Search. In Proceedings of the 30th International Conference on Machine Learning, Atalanta, GA, USA, 16–21 June 2013; pp. 1166–1174. [Google Scholar]
- Bogey, R.A.; Barnes, L.A. An EMG-to-Force Processing Approach for Estimating in Vivo Hip Muscle Forces in Normal Human Walking. IEEE Trans. Neural Syst. Rehabilitation Eng. 2016, 25, 1172–1179. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer-Verlag Inc.: Berlin, Germany, 2006. [Google Scholar]
- Zhang, Y.; Leithead, W.E.; Leith, D.J. Time-series Gaussian Process Regression Based on Toeplitz Computation of O(N2) Operations and O(N)-level Storage. In Proceedings of the IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kernel | Characteristics |
|---|---|
| SE | Infinitely differentiable, suitable to model smooth dynamics and kinematics. |
| MC | Suitable to model dynamics and kinematics with different roughness. |
| LIN | With linearly varying amplitude, can be used to model linear dynamics and kinematics. |
| WN | Gaussian white noise, can be used to model system noise. |
| PER | With periodic variations, suitable for periodic movements such as the standard gaits. |
| NN | Rapid or large variations, suitable for irregular movements with random features. |
| RQ | Mixture of SE with different length scales, suitable for smooth and unspecified movements. |
| SIG | Suitable for sudden changes, for example, sudden ground contact. |
| Number of Subjects | Age (Years) | Height (cm) | Mass (kg) |
|---|---|---|---|
| 5 | 26.3 ± 3.4 | 176.4 ± 5.3 | 63.3 ± 3.1 |
| Subject | 0.8 m/s | 1.2 m/s | 1.6 m/s | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Ankle | Knee | Hip | Ankle | Knee | Hip | Ankle | Knee | Hip | ||
| A | DGP | 0.8690 | 0.8222 | 0.9233 | 0.9491 | 0.8499 | 0.9432 | 0.9594 | 0.9731 | 0.8842 |
| GP | 0.7698 | 0.4993 | 0.7427 | 0.9265 | 0.5833 | 0.8170 | 0.8565 | 0.3278 | 0.8022 | |
| B | DGP | 0.9897 | 0.9486 | 0.8566 | 0.9773 | 0.9353 | 0.9388 | 0.9764 | 0.9574 | 0.9317 |
| GP | 0.9856 | 0.7586 | 0.8256 | 0.9747 | 0.8977 | 0.9065 | 0.9675 | 0.8726 | 0.9192 | |
| C | DGP | 0.9294 | 0.9306 | 0.8147 | 0.8845 | 0.9325 | 0.8009 | 0.9397 | 0.8810 | 0.8594 |
| GP | 0.9104 | 0.8368 | 0.6702 | 0.5009 | 0.4857 | 0.7246 | 0.5536 | 0.3290 | 0.6571 | |
| D | DGP | 0.9900 | 0.8517 | 0.8632 | 0.9619 | 0.8763 | 0.9353 | 0.8966 | 0.9062 | 0.8164 |
| GP | 0.9871 | 0.7779 | 0.8384 | 0.8488 | 0.7155 | 0.5407 | 0.7123 | 0.1631 | 0.7123 | |
| E | DGP | 0.8502 | 0.8101 | 0.9371 | 0.7983 | 0.8064 | 0.8280 | 0.8093 | 0.9024 | 0.8966 |
| GP | 0.7994 | 0.7523 | 0.6183 | 0.6773 | 0.6431 | 0.7593 | 0.7411 | 0.7896 | 0.7887 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Yin, Y. Dependent-Gaussian-Process-Based Learning of Joint Torques Using Wearable Smart Shoes for Exoskeleton. Sensors 2020, 20, 3685. https://doi.org/10.3390/s20133685
Yang J, Yin Y. Dependent-Gaussian-Process-Based Learning of Joint Torques Using Wearable Smart Shoes for Exoskeleton. Sensors. 2020; 20(13):3685. https://doi.org/10.3390/s20133685
Chicago/Turabian StyleYang, Jiantao, and Yuehong Yin. 2020. "Dependent-Gaussian-Process-Based Learning of Joint Torques Using Wearable Smart Shoes for Exoskeleton" Sensors 20, no. 13: 3685. https://doi.org/10.3390/s20133685
APA StyleYang, J., & Yin, Y. (2020). Dependent-Gaussian-Process-Based Learning of Joint Torques Using Wearable Smart Shoes for Exoskeleton. Sensors, 20(13), 3685. https://doi.org/10.3390/s20133685