Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms

 ,
,  ,
,
Abstract
1. Introduction
1.1. Millimeter-Wave V2X Communication
1.2. Free-Space Optics V2X Communication
1.3. Contribution: Sensor-Aided V2X Communication
1.4. Organization
1.5. Notation
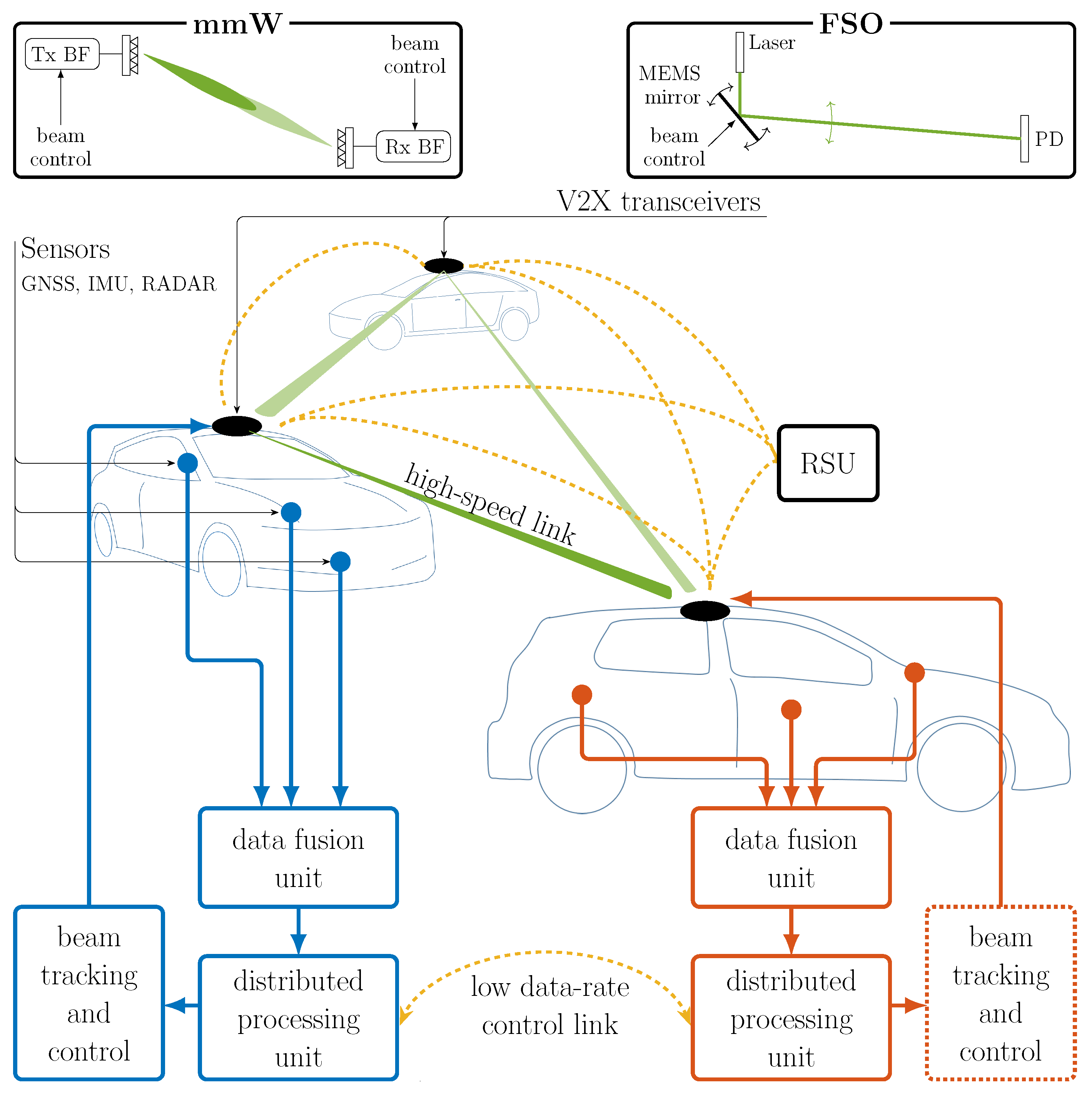
2. Proposed V2X System Architecture
3. Vehicle Dynamics Modeling and Beam-Pointing
3.1. Vehicle Dynamics Modeling
3.2. Derivation of Line-of-Sight Direction
3.3. Estimation of Line-of-Sight Direction
4. Communication System Model
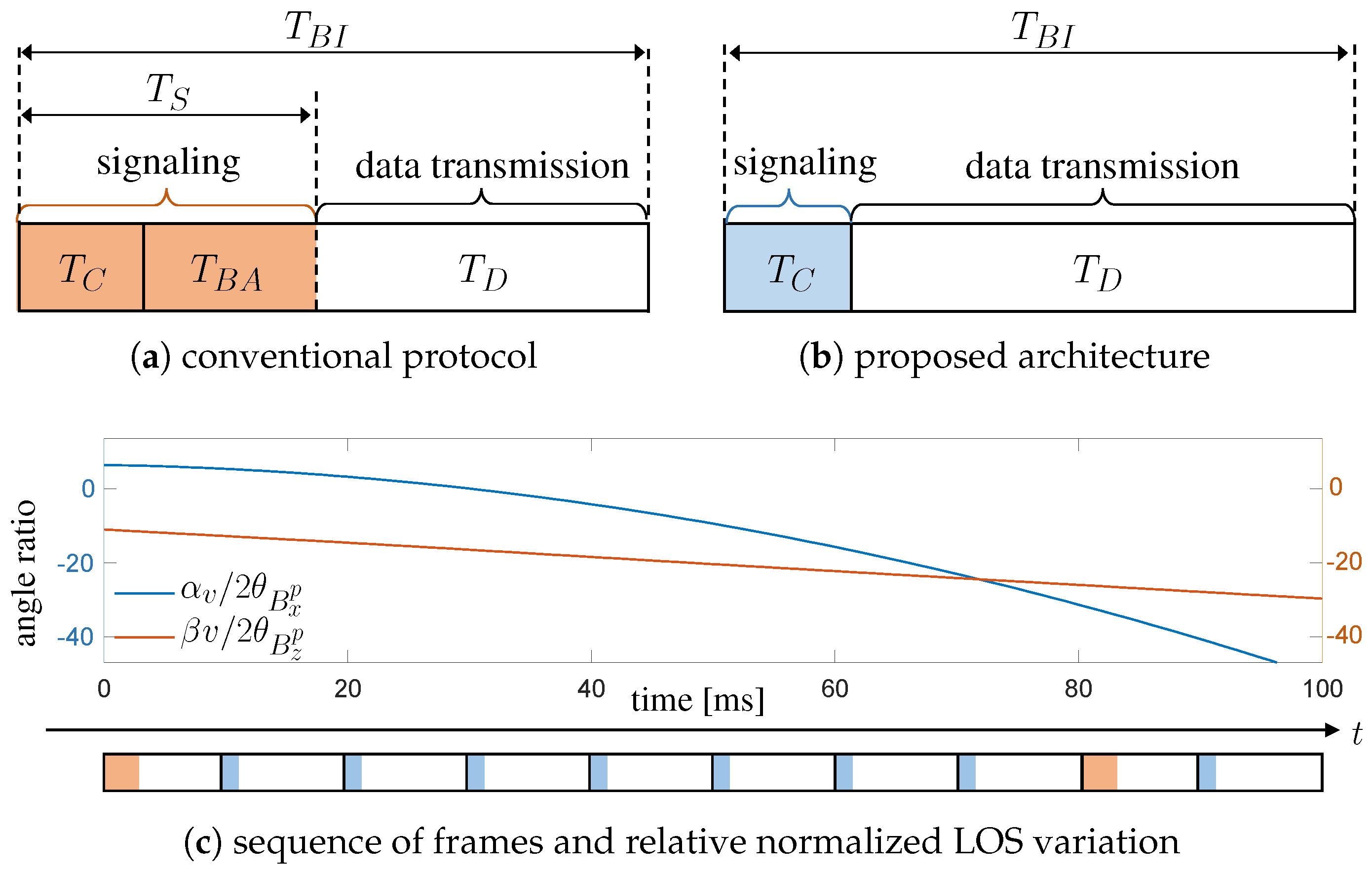
4.1. Conventional Time-Slotted Frame Structure
4.2. Proposed Frame Structure and Beam Alignment Procedure
4.3. Millimeter-Wave V2V
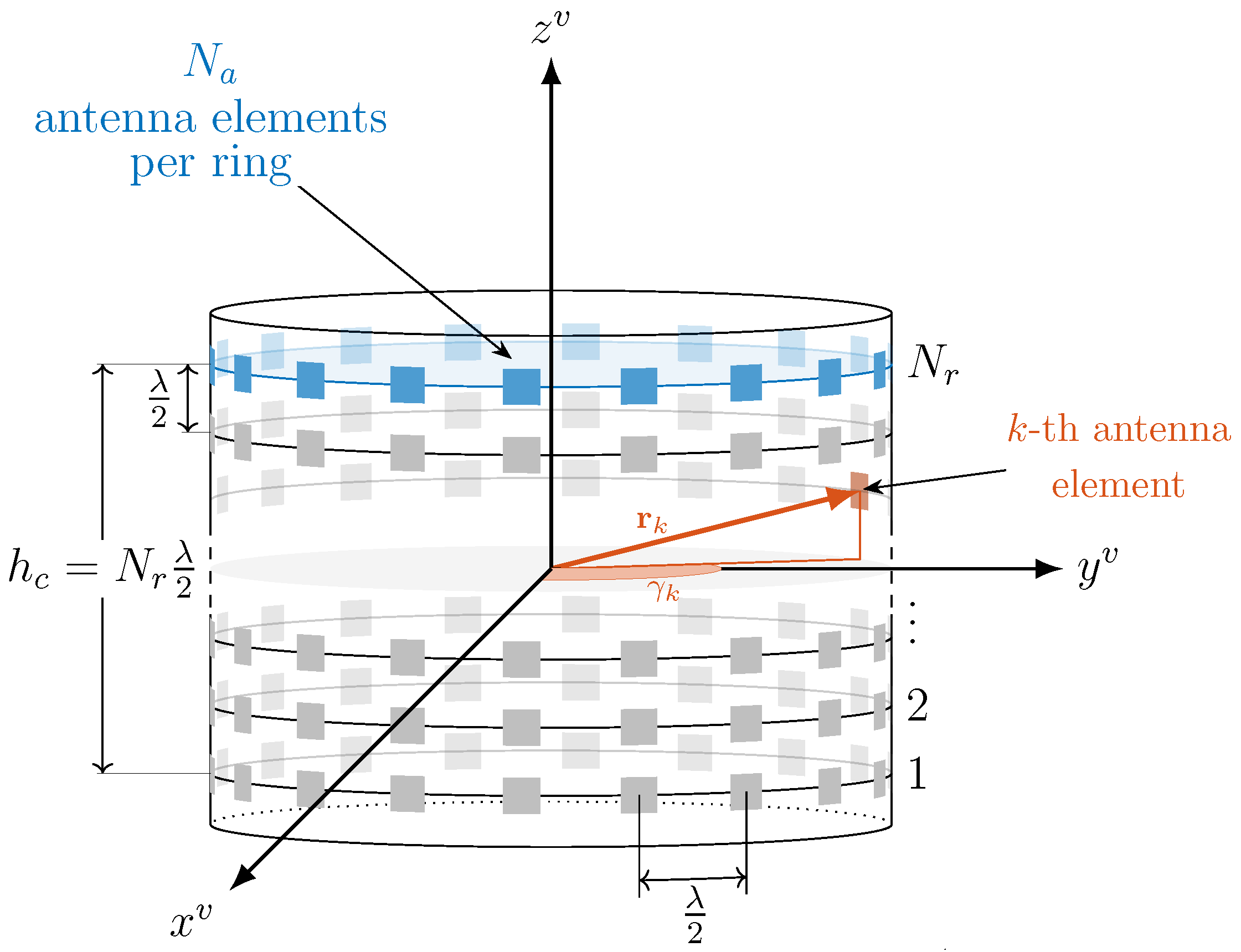
4.3.1. Cylindrical Array Geometry
4.3.2. Millimeter-Wave V2V Performance
4.4. Free-Space Optics V2V
4.4.1. Laser and Photodetector Circular Array Geometry
4.4.2. Free-Space Optics V2V Performance
- denotes the number of PDs on which the signal impinges;
- The numerator is the sum of the squared electrical currents produced by the signal incident on each PD, with a responsivity of ;
- The first term at the denominator is the shot noise associated with the background light-induced current (i.e., the solar radiation), and to the useful signal. Symbol e denotes the electron’s charge. The solar irradiance is assumed to be isotropic and it is obtained by multiplying the spectrum and the receiver’s optical bandwidth (limited by the responsivity or by a proper optical filter);
- The second term at the denominator is the current noise power comprising both the dark current of the photodetector and the overall electronic noise generated by the receiving circuitry (mostly from the first amplifying stage). It is summarized by the input-referred Noise Equivalent Power .
5. Numerical Results
5.1. Simulated Vehicular Scenario
5.2. Millimeter-Wave Settings
5.3. Free-Space Optics Settings
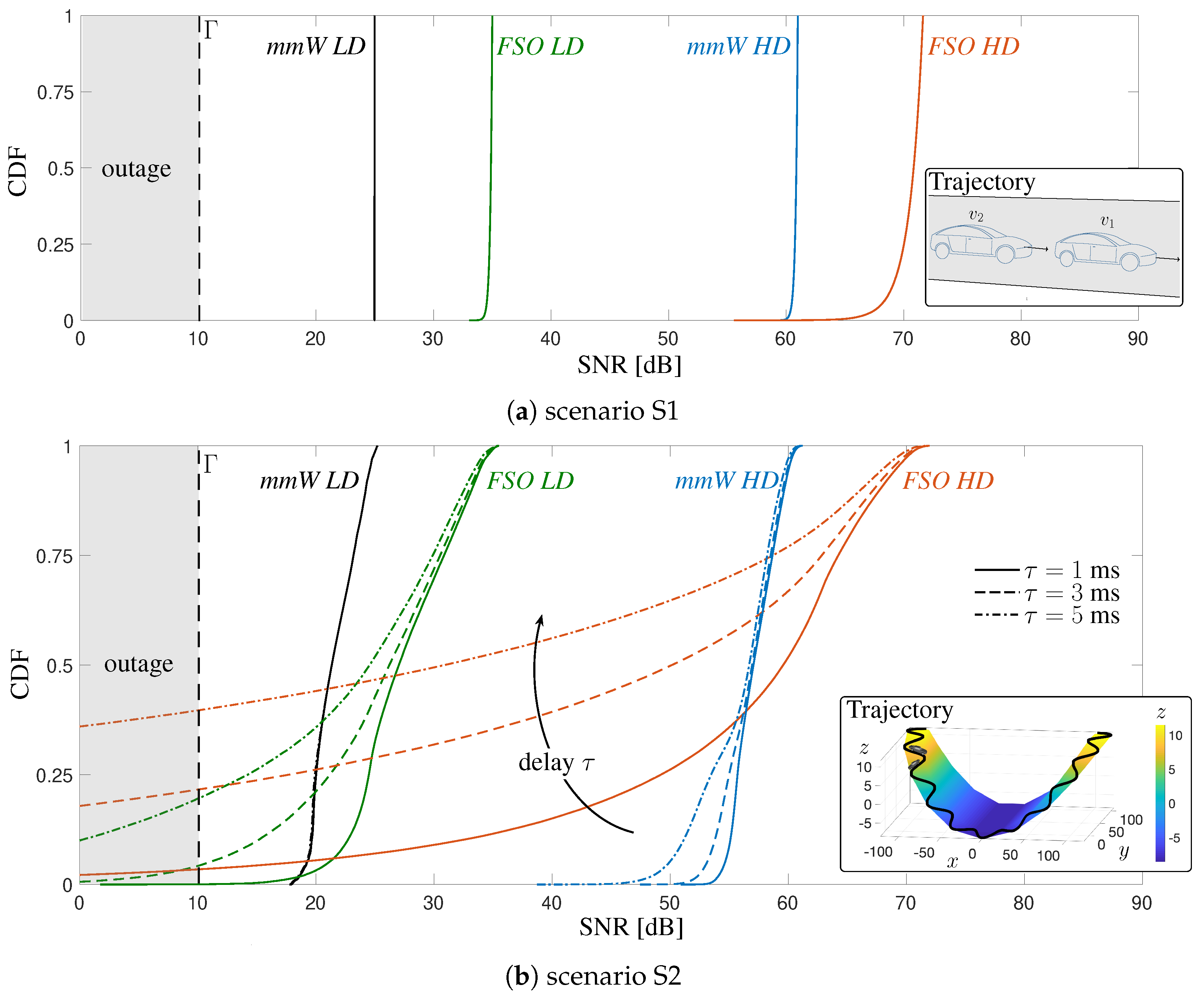
5.4. Performance Evaluation in Two Distinct Vehicular Scenarios
6. Concluding Remarks and Future Directions
Author Contributions
Funding
Conflicts of Interest
References
- Li, L.; Wen, D.; Yao, D. A Survey of Traffic Control With Vehicular Communications. IEEE Trans. Intell. Transp. Syst. 2014, 15, 425–432. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Chan, C.Y. Advancements, prospects, and impacts of automated driving systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated Driving Systems; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Andrews, J.G.; Buzzi, S.; Choi, W.; Hanly, S.V.; Lozano, A.; Soong, A.C.; Zhang, J.C. What will 5G be? IEEE J. Sel. Areas Commun. 2014, 32, 1065–1082. [Google Scholar] [CrossRef]
- Popovski, P.; Trillingsgaard, K.F.; Simeone, O.; Durisi, G. 5G wireless network slicing for eMBB, URLLC, and mMTC: A communication-theoretic view. IEEE Access 2018, 6, 55765–55779. [Google Scholar] [CrossRef]
- Study on Enhancement of 3GPP Support for 5G V2X Services. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3108 (accessed on 20 June 2020).
- Choi, J.; Va, V.; Gonzàlez-Prelcic, N.; Daniels, R.; Bhat, C.R.; Heath, R.W. Millimeter-wave vehicular communication to support massive automotive sensing. IEEE Commun. Mag. 2016, 54, 160–167. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Information technology—Local and metropolitan area networks—Specific requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments. Available online: https://ieeexplore.ieee.org/document/5514475?arnumber=5514475 (accessed on 20 June 2020).
- Study on LTE Support for Vehicle-to-Everything (V2X) Services. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2898 (accessed on 20 June 2020).
- European Commission. 2008/671/EC: Commission Decision of 5 August 2008 on the Harmonised Use of Radio Spectrum in the 5875–5905 MHz Frequency Band for Safety-Related Applications of Intelligent Transport Systems (ITS). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?qid=1592963965016&uri=CELEX:32008D0671 (accessed on 20 June 2020).
- C-Roads. Radio Frequencies Designated for Enhanced Road Safety in Europe—C-Roads Position on the Usage of the 5.9 GHz Band. Available online: https://www.c-roads.eu/fileadmin/user_upload/media/Dokumente/C-Roads_Position_paper_on_59GHz_final.pdf (accessed on 20 June 2020).
- C2C-CC. CAR 2 CAR Communication Consortium Manifesto: Overview of the C2C-CC System. Available online: https://www.car-2-car.org/fileadmin/documents/General_Documents/C2C-CC_Manifesto_Aug_2007.pdf (accessed on 20 June 2020).
- 5G Automotive Association. The Case for Cellular V2X for Safety and Cooperative Driving. Available online: https://5gaa.org/wp-content/uploads/2017/10/5GAA-whitepaper-23-Nov-2016.pdf (accessed on 20 June 2020).
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular Communications for ITS: Standardization and Challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Combi, L.; Spagnolini, U. Adaptive Optical Processing for Wideband Hybrid Beamforming. IEEE Trans. Commun. 2019, 67, 4967–4979. [Google Scholar] [CrossRef]
- Han, S.; I, C.; Xu, Z.; Rowell, C. Large-scale antenna systems with hybrid analog and digital beamforming for millimeter wave 5G. IEEE Commun. Mag. 2015, 53, 186–194. [Google Scholar] [CrossRef]
- Ayach, O.E.; Rajagopal, S.; Abu-Surra, S.; Pi, Z.; Heath, R.W. Spatially sparse precoding in millimeter wave MIMO systems. IEEE Trans. Wirel. Commun. 2014, 13, 1499–1513. [Google Scholar] [CrossRef]
- Kutty, S.; Sen, D. Beamforming for Millimeter Wave Communications: An Inclusive Survey. IEEE Commun. Surv. Tutor. 2016, 18, 949–973. [Google Scholar] [CrossRef]
- Molisch, A.F.; Ratnam, V.V.; Han, S.; Li, Z.; Nguyen, S.L.H.; Li, L.; Haneda, K. Hybrid beamforming for massive MIMO: A survey. IEEE Commun. Mag. 2017, 55, 134–141. [Google Scholar] [CrossRef]
- Wang, J. Beam codebook based beamforming protocol for multi-Gbps millimeter-wave WPAN systems. IEEE J. Sel. Areas Commun. 2009, 27, 1390–1399. [Google Scholar] [CrossRef]
- Hur, S.; Kim, T.; Love, D.J.; Krogmeier, J.V.; Thomas, T.A.; Ghosh, A. Millimeter Wave Beamforming for Wireless Backhaul and Access in Small Cell Networks. IEEE Trans. Commun. 2013, 61, 4391–4403. [Google Scholar] [CrossRef]
- Li, B.; Zhou, Z.; Zou, W.; Sun, X.; Du, G. On the efficient beam-forming training for 60GHz wireless personal area networks. IEEE Trans. Wirel. Commun. 2013, 12, 504–515. [Google Scholar] [CrossRef]
- Alkhateeb, A.; Ayach, O.E.; Leus, G.; Heath, R.W. Channel estimation and hybrid precoding for millimeter wave cellular systems. IEEE J. Sel. Top. Signal Process. 2014, 8, 831–846. [Google Scholar] [CrossRef]
- Nitsche, T.; Flores, A.B.; Knightly, E.W.; Widmer, J. Steering with eyes closed: mm-Wave beam steering without in-band measurement. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, China, 26 April–1 May 2015; pp. 2416–2424. [Google Scholar]
- Devoti, F.; Filippini, I.; Capone, A. Facing the Millimeter-Wave Cell Discovery Challenge in 5G Networks With Context-Awareness. IEEE Access 2016, 4, 8019–8034. [Google Scholar] [CrossRef]
- Brambilla, M.; Pardo, D.F.; Nicoli, M. Location-assisted Subspace-based Beam Alignment in LOS/NLOS mm-wave V2X Communications. In Proceedings of the IEEE International Conference on Communications, Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Perfecto, C.; Ser, J.D.; Bennis, M. Millimeter-wave V2V communications: Distributed association and beam alignment. IEEE J. Sel. Areas Commun. 2017, 35, 2148–2162. [Google Scholar] [CrossRef]
- González-Prelcic, N.; Méndez-Rial, R.; Heath, R.W. Radar aided beam alignment in MmWave V2I communications supporting antenna diversity. In Proceedings of the 2016 Information Theory and Applications Workshop (ITA), La Jolla, CA, USA, 31 January–5 February 2016; pp. 1–7. [Google Scholar]
- Va, V.; Shimizu, T.; Bansal, G.; Heath, R.W. Beam design for beam switching based millimeter wave vehicle-to-infrastructure communications. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- Garcia, N.; Wymeersch, H.; Ström, E.G.; Slock, D. Location-aided mm-wave channel estimation for vehicular communication. In Proceedings of the 2016 IEEE 17th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Edinburgh, UK, 3–6 July 2016; pp. 1–5. [Google Scholar]
- Mavromatis, I.; Tassi, A.; Piechocki, R.J.; Nix, A. mmWave system for future ITS: A MAC-layer approach for V2X beam steering. In Proceedings of the IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–6. [Google Scholar]
- Killinger, D. Free Space Optics for Laser Communication Through the Air. Opt. Photonics News 2002, 13, 36–42. [Google Scholar] [CrossRef]
- Bloom, S.; Korevaar, E.; Schuster, J.; Willebrand, H. Understanding the performance of free-space optics. J. Opt. Netw. 2003, 2, 178–200. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Popoola, W. Terrestrial free-space optical communications. In Mobile and Wireless Communications Network Layer and Circuit Level Design; Ait Fares, S., Adachi, F., Eds.; InTech: Vienna, Austria, 2010. [Google Scholar] [CrossRef]
- Kaadan, A.; Refai, H.H.; LoPresti, P.G. Multielement FSO transceivers alignment for inter-UAV communications. J. Lightw. Technol. 2014, 32, 4785–4795. [Google Scholar] [CrossRef]
- Moll, F.; Horwath, J.; Shrestha, A.; Brechtelsbauer, M.; Fuchs, C.; Navajas, L.A.M.; Souto, A.M.L.; Gonzàlez, D.D. Demonstration of High-Rate Laser Communications From a Fast Airborne Platform. IEEE J. Sel. Areas Commun. 2015, 33, 1985–1995. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Optical communication in space: Challenges and mitigation techniques. IEEE Commun. Surv. Tutor. 2017, 19, 57–96. [Google Scholar] [CrossRef]
- Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M. On Divergence-Angle Efficiency of a Laser Beam in Free-Space Optical Communications for High-Speed Trains. IEEE Trans. Veh. Technol. 2017, 66, 7677–7687. [Google Scholar] [CrossRef]
- Epple, B.; Henniger, H. Free-space Optical Transmission Improves Land-Mobile Communications. Available online: https://www.researchgate.net/profile/Bernhard_Epple2/publication/224986852_Free-space_optical_transmission_improves_land-mobile_communications/links/54f4df0a0cf2ba6150642809/Free-space-optical-transmission-improves-land-mobile-communications.pdf (accessed on 20 June 2020).
- Nebuloni, R.; Capsoni, C. Effects of Adverse Weather on Free Space Optics. In Optical Wireless Communications; Springer: Cham, Switzerland, 2016; pp. 47–68. [Google Scholar]
- Andrews, L.C.; Phillips, R.L.; Hopen, C.Y.; Al-Habash, M.A. Theory of optical scintillation. J. Opt. Soc. Am. A 1999, 16, 1417–1429. [Google Scholar] [CrossRef]
- Tagliaferri, D.; Matera, A.; Capsoni, C.; Spagnolini, U. Nonlinear Visible Light Communications Broadcast Channel Precoding: A New Solution for In-flight Systems. IEEE Photonics J. 2018, 10, 1–14. [Google Scholar] [CrossRef]
- Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M.; Zhang, T. A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications. IEEE Commun. Surv. Tutor. 2018, 20, 1104–1123. [Google Scholar] [CrossRef]
- Epple, B. Using a GPS-aided inertial system for coarse-pointing of free-space optical communication terminals. In Free-Space Laser Communications VI; International Society for Optics and Photonics: San Diego, CA, USA, 2006; Volume 6304. [Google Scholar]
- ETSI. 5G; Service Requirements for Enhanced V2X Scenarios. Available online: https://www.etsi.org/deliver/etsi_ts/122100_122199/122186/15.04.00_60/ts_122186v150400p.pdf (accessed on 20 June 2020).
- Brambilla, M.; Tagliaferri, D.; Nicoli, M.; Spagnolini, U. Sensor and Map-Aided Cooperative Beam Tracking for Optical V2V Communications. In Proceedings of the 2020 IEEE Vehicular Technology Conference Workshops, Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Giordani, M.; Polese, M.; Roy, A.; Castor, D.; Zorzi, M. A Tutorial on Beam Management for 3GPP NR at mmWave Frequencies. IEEE Commun. Surv. Tutor. 2019, 21, 173–196. [Google Scholar] [CrossRef]
- Brambilla, M.; Nicoli, M.; Savaresi, S.; Spagnolini, U. Inertial Sensor Aided mmWave Beam Tracking to Support Cooperative Autonomous Driving. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Brambilla, M.; Matera, A.; Tagliaferri, D.; Nicoli, M.; Spagnolini, U. RF-Assisted Free-Space Optics for 5G Vehicle-to-Vehicle Communications. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Kok, M.; Hol, J.D.; Schön, T.B. Using inertial sensors for Position and Orientation Estimation. Found. Trends Signal Process. 2017, 11, 1–153. [Google Scholar] [CrossRef]
- Wymeersch, H.; Seco-Granados, G.; Destino, G.; Dardari, D.; Tufvesson, F. 5G mmWave positioning for vehicular networks. IEEE Wirel. Commun. 2017, 24, 80–86. [Google Scholar] [CrossRef]
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit Cooperative Positioning in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980. [Google Scholar] [CrossRef]
- Brambilla, M.; Nicoli, M.; Soatti, G.; Deflorio, F. Augmenting Vehicle Localization by Cooperative Sensing of the Driving Environment: Insight on Data Association in Urban Traffic Scenarios. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1646–1663. [Google Scholar] [CrossRef]
- Zhang, F.; Stähle, H.; Chen, G.; Simon, C.C.C.; Buckl, C.; Knoll, A. A sensor fusion approach for localization with cumulative error elimination. In Proceedings of the 012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Hamburg, Germany, 13–15 September 2012; pp. 1–6. [Google Scholar]
- IEEE. IEEE Standard for Information Technology–Telecommunications and Information Exchange between Systems–Local and Metropolitan Area Networks–Specific requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 3: Enhancements for Very High Throughput in the 60 GHz Band. Available online: https://ieeexplore.ieee.org/document/6392842 (accessed on 20 June 2020).
- IEEE. IEEE Draft Standard for Information Technology–Telecommunications and Information Exchange Between Systems Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications–Amendment: Enhanced Throughput for Operation in License-Exempt Bands Above 45 GHz. Available online: https://reference.globalspec.com/standard/13666411/p802-11ay-d4-0-jun-2019 (accessed on 20 June 2020).
- Marciniak, M. International standards for optical wireless communications: State-of-the-art and future directions. In Advanced Free-Space Optical Communication Techniques and Applications III; International Society for Optics and Photonics: San Diego, CA, USA, 2017; Volume 10437. [Google Scholar]
- Spagnolini, U. Statistical Signal Processing in Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Soatti, G.; Murtada, A.; Nicoli, M.; Gambini, J.; Spagnolini, U. Low-Rank Channel and Interference Estimation in mm-Wave Massive Antenna Arrays. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 922–926. [Google Scholar]
- Akdeniz, M.R.; Liu, Y.; Samimi, M.K.; Sun, S.; Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter Wave Channel Modeling and Cellular Capacity Evaluation. IEEE J. Sel. Areas Commun. 2014, 32, 1164–1179. [Google Scholar] [CrossRef]
- Mirrorcle Technologies, Inc. MEMS Mirrors. Available online: https://www.mirrorcletech.com/wp/products/mems-mirrors/ (accessed on 20 June 2020).
- Gagliardi, R.M.; Karp, S. Optical Communications; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Newport Corporation. User’s Guide: High-Speed Receivers—High-Speed Detectors. Available online: https://www.newport.com/medias/sys_master/images/images/h68/hba/8797113122846/High-Speed-Detectors-and-Receivers-User-s-Manual.pdf (accessed on 20 June 2020).
- Hecht, J. PHOTONIC FRONTIERS: EYE-SAFE LASERS—Retina-Safe Wavelengths Benefit Open-Air Applications. Available online: https://www.laserfocusworld.com/test-measurement/research/article/16563227/photonic-frontiers-eyesafe-lasers-retinasafe-wavelengths-benefit-openair-applications (accessed on 20 June 2020).
- Macleod, H. Thin Film-Optical Filters, 3rd ed.; Series in Optics and Optoelectronics; CRC Press: Bristol, UK, 2001. [Google Scholar]
- Telecommunication, I.T.U. ITU-T G.975.1 Recommendation: Forward error correction for high bit-rate DWDM submarine systems. In SERIES G Recommendation: TRANSMISSION SYSTEMS AND MEDIA, DIGITAL SYSTEMS AND NETWORKS: Digital Sections and Digital Line Systems—Optical Fibre Submarine Cable Systems; ITU: Geneva, Switzerland, 2004. [Google Scholar]
- Tzimpragos, G.; Kachris, C.; Djordjevic, I.B.; Cvijetic, M.; Soudris, D.; Tomkos, I. A survey on FEC codes for 100 G and beyond optical networks. IEEE Commun. Surv. Tutor. 2016, 18, 209–221. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Parameter | Symbol | Value |
|---|---|---|---|---|---|
| Tx power | 1 mW | Signal bandwidth | B | 2.16 GHz | |
| Update delay | 1–15 ms | Sensor sampling freq. | 1 kHz | ||
| Vehicle height | 1.5 , 1.7 m | Vehicle length | 4.7 m | ||
| Position error | 10 cm | Angular error | 0.1, 1, 2 deg | ||
| mmW-specific | |||||
| Frequency | f | 60 GHz | Path Loss exponent | 2 | |
| Shadowing std. dev. | 0 dB | Noise floor | −174 dBm/Hz | ||
| Rx Noise Figure | 6 dB | Pattern parameters | b, c | 1.8 , 1.6 | |
| FSO-specific | |||||
| Tx Laser wavelength | 1550 nm | Rx aperture (single PD) | 1 cm | ||
| Rx array diameter | D | 10 cm | Rx array height | H | 5 cm |
| PD responsivity | 0.9 A/W | Optical filter bandwidth | 50 nm | ||
| Solar irradiance | 5.58 | Noise Equivalent Power | 20 [65] | ||
| Trajectories—according to Equation (29) | |||||
| Vehicle speed | v | 50 km/h | Angular vel. | rad/s, | |
| Horizontal angular vel. | rad/s | Vertical angular vel. | rad/s, | ||
| Horizontal amplitude | m | Vertical amplitude | 10 m | ||
| Radius | m | Vehicle time gap | 0.5–5 s | ||
| mmW | FSO | |||||
|---|---|---|---|---|---|---|
| LD | 32 | 8 | ∼ | ∼ | ||
| HD | 180 | 90 | ∼ | ∼ | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brambilla, M.; Combi, L.; Matera, A.; Tagliaferri, D.; Nicoli, M.; Spagnolini, U. Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms. Sensors 2020, 20, 3573. https://doi.org/10.3390/s20123573
Brambilla M, Combi L, Matera A, Tagliaferri D, Nicoli M, Spagnolini U. Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms. Sensors. 2020; 20(12):3573. https://doi.org/10.3390/s20123573
Chicago/Turabian StyleBrambilla, Mattia, Lorenzo Combi, Andrea Matera, Dario Tagliaferri, Monica Nicoli, and Umberto Spagnolini. 2020. "Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms" Sensors 20, no. 12: 3573. https://doi.org/10.3390/s20123573
APA StyleBrambilla, M., Combi, L., Matera, A., Tagliaferri, D., Nicoli, M., & Spagnolini, U. (2020). Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms. Sensors, 20(12), 3573. https://doi.org/10.3390/s20123573