Shoe-Integrated, Force Sensor Design for Continuous Body Weight Monitoring


Abstract
1. Introduction
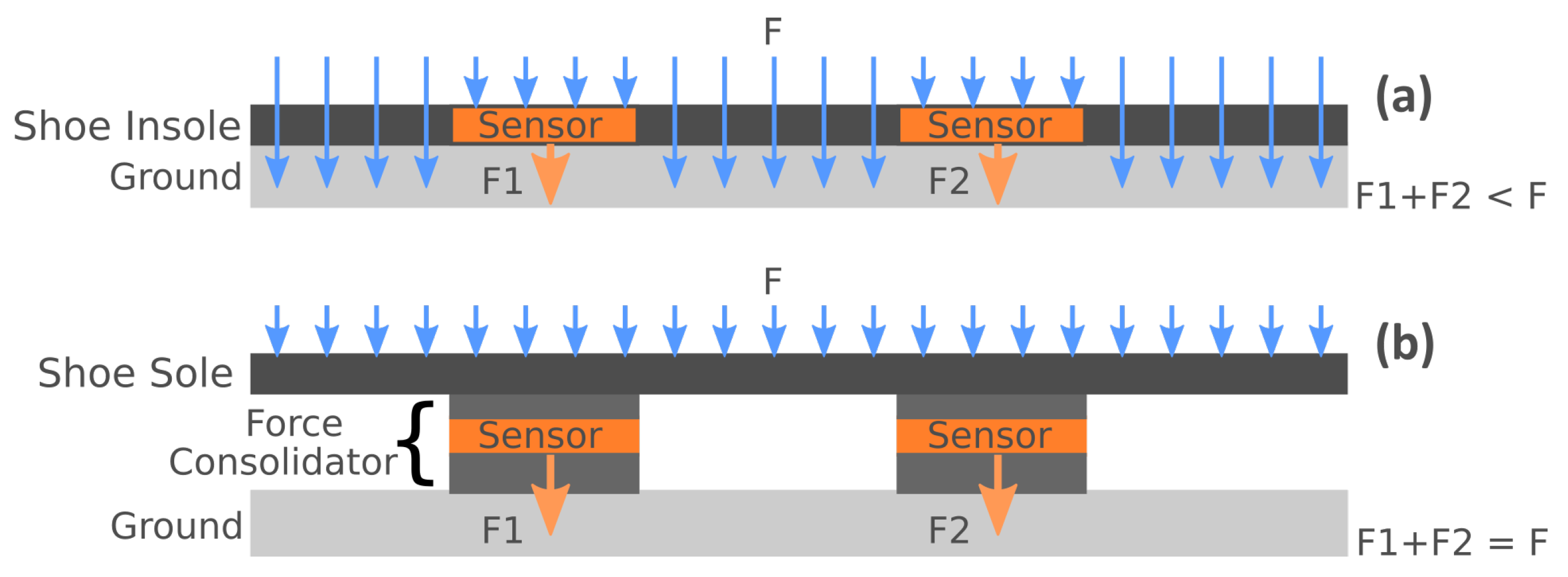
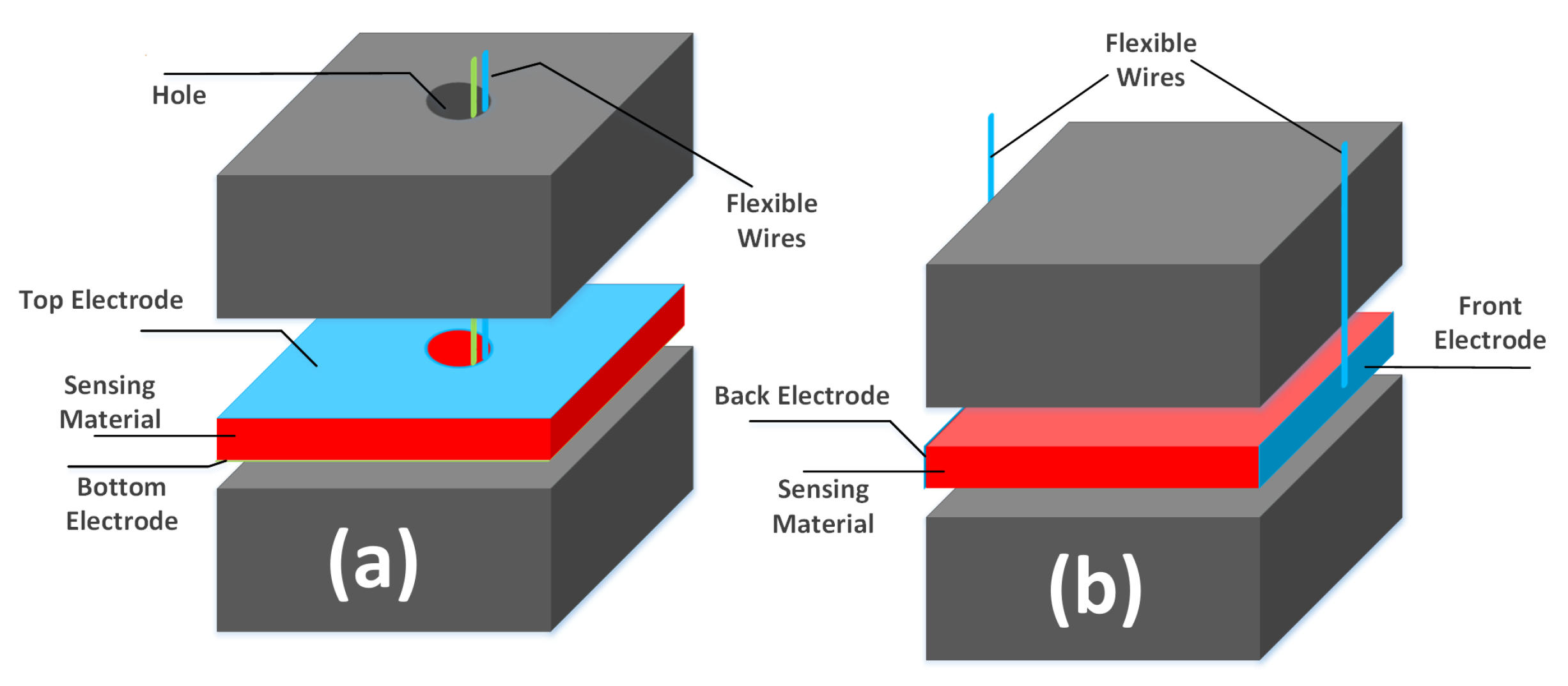
- Sensor Design: A novel method for designing the force sensors is proposed. A layered structure called Sandwiched Sensor Force Consolidators (SSFC) is used under the shoe sole to concentrate and channel the applied forces. Each SSFC is a three-layer structure made of a top and bottom capping layers, and a middle sensory layer, as shown in Figure 1b. The proposed method can be used to customize the SSFC shape in support of an ergonomic shoe design that is comfortable to wear.
- Ergonomic Shoe Design and Custom Sensor Characterization: To improve the wearability comfort of the proof-of-concept prototype, the paper introduces a streamlined, efficient, equivalent-area methodology for the extraction of the transduction characteristics of SSFC sensor structures of arbitrary shapes. The methodology is fully self-contained and does not require external or vendor 3D FEM codes for shape-from-force analysis.
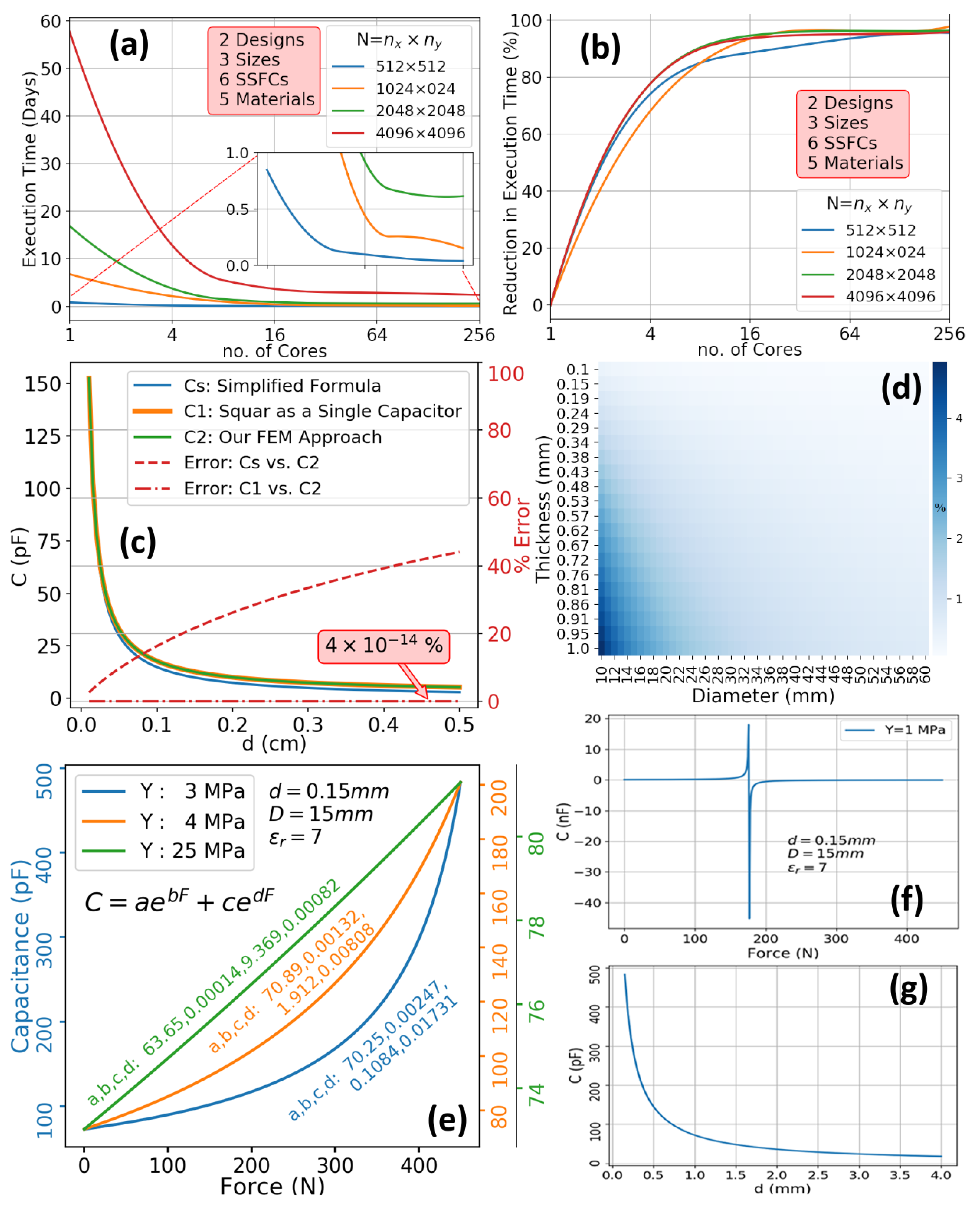
- High-Performance Processing: To speed up sensor characterization and the design optimization loop of the semi-computational methodology, a parallel programming interface has been implemented and tested using C and OpenMP. It has been shown to reduce the shoe design optimization runtime from few days to few hours.
2. Review of Prior Art
3. Novel Force Sensor Structure
3.1. SSFC Structure
3.2. On-Shoe Circuitry and Connectivity
3.3. Array of SSFCs
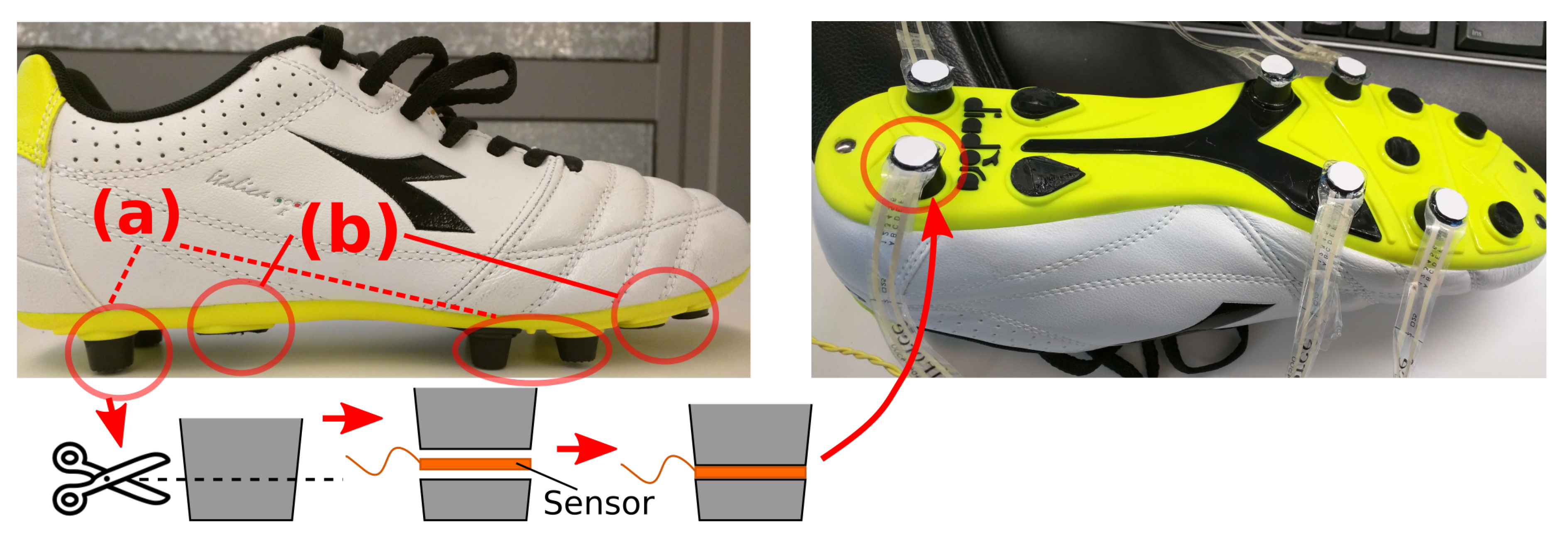
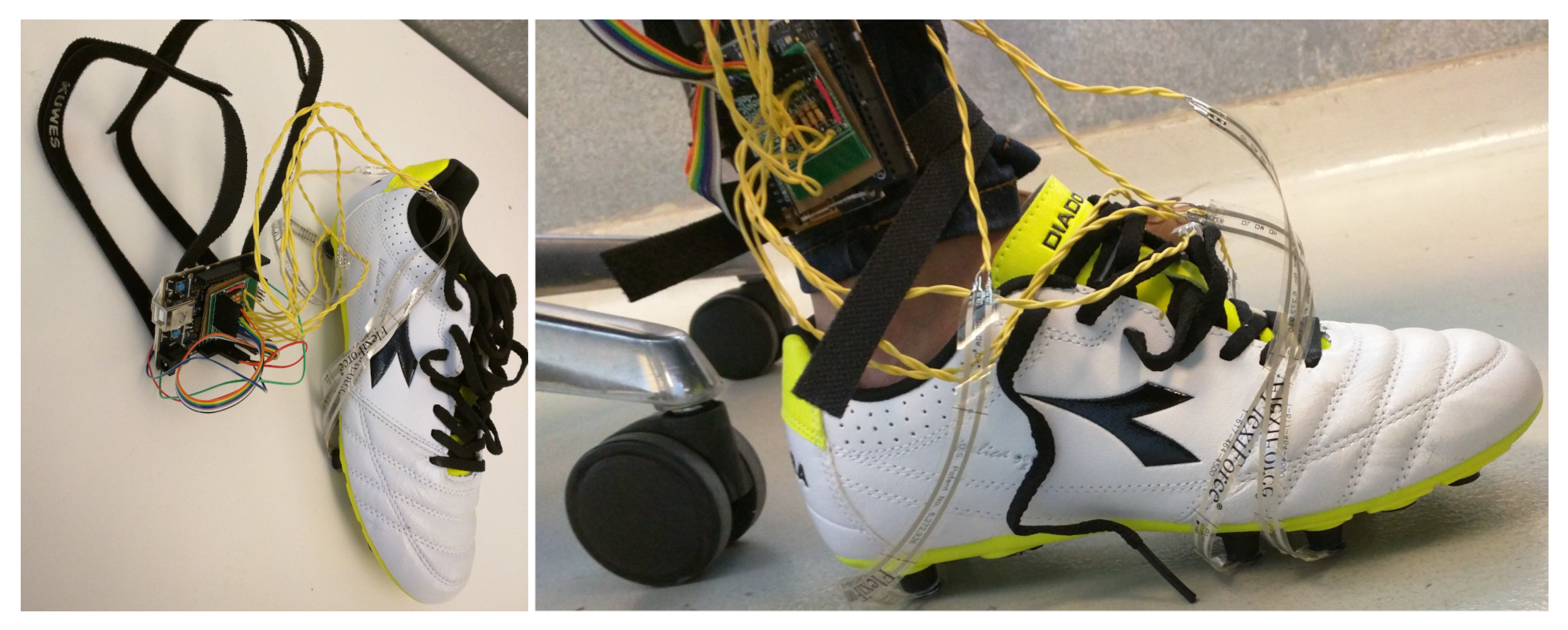
3.4. Proof-of-Concept Prototype
4. Improving Comfort and Wearability
- Sensor shape pixelization and mapping onto a square of equal area.
- Z-direction discretization of the sensing material thickness.
- Rotationally symmetric force distribution over the equivalent square area.
4.1. Design Specifications
4.2. Image Processing and Equivalent Area
- Computational Efficiency: As will be explained shortly, the SSFC is meshed into small elements, and the square transformation eliminates the need to access elements outside the sensing area. For example, the shape in Figure 5C has more than 50% area that needs no processing. Even if the elements in this area are marked as not-to-process, at each iteration, at least one memory access is needed to check the element validity. There could be millions of such elements during the full simulation process, which will waste a substantial amount of processing time.
- Algorithmic Simplification: The quantity of interest is the cumulative change in the physical property of an SSFC rather than the change gradient across its surface. Therefore, preserving the SSFC geometry is unnecessary. This helps in simplifying the computation of additional effects such as the fringe effects in capacitive sensors. It is well known that it is quite complex to account for the fringe capacitive effects of an irregular shape, while a regular one allows the use of existing true-and-tried formulas.
- Realistic SSFC Simulation: The shape transformation further enables the use of force distribution models that result in realistic vertical displacement maps and, therefore, realistic SSFC transduction characteristics.
- Reduction of Approximation Errors: Finally, it helps in reducing the approximation errors inherent in the meshing of a complex shape and the discretization of its boundary.
4.3. Force Distribution Model
4.4. Transduction Characteristics
5. Implementations
5.1. Feasibility Prototype
5.2. Computational Framework—Accelerating the Ergonomic Design
- A computational efficiency component to illustrate the significant reduction in processing time for ergonomic shoe design process.
- A characterization component to illustrate the accuracy of the sensor characterization technique.
6. Experimental Results and Analysis
6.1. Experiment 1
6.2. Experiment 2
6.3. Experiment 3
6.4. Characterization Output
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog to Digital Converter |
| BB | Bounding Box |
| FEM | Finite-Element-Method |
| FD | Force Distribution |
| FSR | Force-Sensing Resistor |
| GPU | Graphics Processing Unit |
| GRF | Ground Reaction Force |
| HPC | High-Performance Computing |
| OpenMP | Open Multi-Processing |
| SIM | Simulation |
| SSFC | Sandwiched Sensor Force Consolidators |
| ST | Shape Transformation |
| UART | Universal Asynchronous Receiver/Transmitter |
| US | United States |
References
- American Heart Association. Self-Check Plan for Heart-Failure Management. Available online: https://www.heart.org/-/media/files/health-topics/heart-failure/self-check-plan-for-hf-management-477328.pdf?la=en (accessed on 18 May 2020).
- Chaudhry, S.I.; Wang, Y.; Concato, J.; Gill, T.M.; Krumholz, H. Patterns of Weight Change Preceding Hospitalization for Heart Failure. Circulation 2007, 116, 1549–1554. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Goode, K.M.; Cuddihy, P.E.; Cleland, J.G.; TEN-HMS Investigators. Predicting hospitalization due to worsening heart failure using daily weight measurement: Analysis of the trans-European networkehome-care management system (ten-hms) study. Eur. J. Heart Fail. 2009, 11, 420–427. [Google Scholar] [CrossRef] [PubMed]
- Hegde, N.; Bries, M.; Sazonov, E. A Comparative Review of Footwear-Based Wearable Systems. Electronics 2016, 5, 48. [Google Scholar] [CrossRef]
- Tekscan. F-scan, In-Shoe Pressure Measurement Technology. Available online: https://www.tekscan.com/product-group/medical/in-shoe (accessed on 1 May 2020).
- Castro, M.; Soares, D.; Machado, L. Comparison of Vertical GRF Obtained from Force Plate, Pressure Plate and Insole Pressure System. Port. J. Sport. Sci. (Suppl.) 2011, 11, 849–852. [Google Scholar]
- Eng, S.; Al-Mai, O.; Ahmadi, M. A 6 DoF, Wearable, Compliant Shoe Sensor for Total Ground Reaction Measurement. IEEE Trans. Instrum. Meas. 2018, 67, 2714–2722. [Google Scholar] [CrossRef]
- Jawale1, B.; Korra, L. Wearable Body Weight Estimation using FSR. Int. Res. J. Eng. Technol. (IRJET) 2018, 5, 90–93. [Google Scholar]
- Hellstrom, P.; Folke, M.; Ekstrom, M. Wearable Weight Estimation System. Procedia Comput. Sci. 2015, 64, 146–152. [Google Scholar] [CrossRef]
- Morris, S.J.; Paradiso, J.A. Shoe-integrated sensor system for wireless gait analysis and real-time feedback. In Proceedings of the Second Joint 24th Annual Conference and the Annual Fall Meeting of the Biomedical Engineering Society [Engineering in Medicine and Biology], Houston, TX, USA, 23–26 October 2002; pp. 2468–2469. [Google Scholar]
- Saadeh, W.; Altaf, M.A.B.; Butt, S.A. A Wearable Neuro-Degenerative Diseases Detection System Based on Gait Dynamics. In Proceedings of the 25th IFIP/IEEE International Conference on Very Large Scale Integration (VLSI-SoC 2017), Abu Dhabi, United Arab Emirates, 23–25 October 2017; pp. 1–6. [Google Scholar]
- Thepudom, T.; Seesaard, T.; Donkrajang, W.; Kerdcharoen, T. Healthcare Shoe System for Gait Monitoring and Foot Odor Detections. In Proceedings of the 2nd IEEE Global Conference on Consumer Electronics (GCCE), Tokyo, Japan, 1–4 October 2013; pp. 81–82. [Google Scholar]
- Eguchi, R.; Yorozu, A.; Takahashi, M. Accessible Ground Reaction Force Estimation Using Insole Force Sensors Without Force Plates. In Proceedings of the 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 2861–2865. [Google Scholar]
- Malvade, P.S.; Joshi, A.K.; Madhe, S.P. IoT Based Monitoring of Foot Pressure Using FSR Sensor. In Proceedings of the International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 6–8 April 2017; pp. 635–639. [Google Scholar]
- Wu, H.; Zhou, Z.; Wang, J.; An, H.; Wei, Q. Recognization of Stance Phase Using Flexible Pressure Sensors. In Proceedings of the 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 10–11 September 2016; pp. 509–512. [Google Scholar]
- Eguchi, R.; Yorozu, A.; Takahashi, M. Kinetic and Spatiotemporal Gait Analysis System Using Instrumented Insoles and Laser Range Sensor. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 705–709. [Google Scholar]
- Aoike, K.; Nagamune, K.; Takayama, K.; Kuroda, R.; Kurosaka, M. Gait Analysis of Normal Subjects by Using Force Sensor and Six Inertial Sensor with Wireless Module. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 1257–1260. [Google Scholar]
- Ishida, T. Development of a Small Biped Entertainment Robot QRIO. In Proceedings of the 4th Symposium on Micro-Nanomechatronics and Human Science, Nagoya, Japan, 31 October–3 November 2004; pp. 23–28. [Google Scholar]
- Delgado-Gonzalo, R.; Hubbard, J.; Renevey, P.; Lemkaddem, A.; Vellinga, Q.; Ashby, D.; Willardson, J.; Bertschi, M. Real-time Gait Analysis with Accelerometer-based Smart Shoes. In Proceedings of the 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Seogwipo, Korea, 11–15 July 2017; p. 148. [Google Scholar]
- McCoy, S. Altra’s First ‘Smart Shoe’ Will Change The Way You Run. Available online: https://gearjunkie.com/altra-running-torin-iq-smart-shoe-review (accessed on 1 May 2020).
- Sensoria. Sensoria Artificial Intelligence Sportswear. Available online: https://www.sensoriafitness.com/ (accessed on 1 May 2020).
- Kickstarter. Digitsole Smartshoe, The World’s First Intelligent Sneaker. Available online: https://www.kickstarter.com/projects/141658446/digitsole-smartshoe-the-worlds-first-intelligent-s (accessed on 1 May 2020).
- 3L Labs. Footlogger. Available online: http://footlogger.com:8080/hp_new/footlogger/ (accessed on 1 May 2020).
- Liu, T.; Inoue, Y.; Shibata, K. A Small and Low-Cost 3-D Tactile Sensor for a Wearable Force Plate. IEEE Sens. J. 2009, 9, 1103–1110. [Google Scholar] [CrossRef]
- Kong, K.; Tomizuka, M. A Gait Monitoring System Based on Air Pressure Sensors Embedded in a Shoe. IEEE/ASME Trans. Mechatron. 2009, 14, 358–370. [Google Scholar] [CrossRef]
- Chinimilli, P.T.; Redkar, S.; Zhang, W. Human Activity Recognition Using Inertial Measurement Units and Smart Shoes. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1462–1467. [Google Scholar]
- Al-Mai, O.; Ahmadi, M.; Albert, J. A Compliant 3-Axis Fiber-Optic Force Sensor for Biomechanical Measurement. IEEE Sens. J. 2017, 17, 1–9. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. A Wearable Ground Reaction Force Sensor System and Its Application to the Measurement of Extrinsic Gait Variability. Sensors 2010, 10, 10240–10255. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Lee, C.; Shim, M.; Han, J.; Baek, Y. Design of an Artificial Neural Network Algorithm for a Low-Cost Insole Sensor to Estimate the Ground Reaction Force (GRF) and Calibrate the Center of Pressure (CoP). Sensors 2018, 18, 4349. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Na, Y.; Gu, G.; Kim, J. Flexible Insole Ground Reaction Force Measurement Shoes for Jumping and Running. In Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 1062–1067. [Google Scholar]
- Rouhani, H.; Favre, J.; Crevoisier, X.; Aminian, K. Ambulatory Assessment of 3D Ground Reaction Force Using Plantar Pressure Distribution. Gait Posture 2010, 32, 311–316. [Google Scholar] [CrossRef] [PubMed]
- Rosquist, P.G.; Collins, G.; Merrell, A.J.; Tuttle, N.J.; Tracy, J.B.; Bird, E.T.; Seeley, M.K.; Fullwood, D.T.; Christensen, W.F.; Bowden, A.E. Estimation of 3D Ground Reaction Force Using Nanocomposite Piezo-Responsive Foam Sensors During Walking. Ann. Biomed. Eng. 2017, 45, 2122–2134. [Google Scholar] [CrossRef] [PubMed]
- Muzaffar, S.; Elfadel, I.M. Piezoresistive Sensor Array Design for Shoe-integrated Continuous Body Weight and Gait Measurement. In Proceedings of the 20th Symposium on Design, Test, Integration & Packaging of MEMS/MOEMS (DTIP 2019), Paris, France, 12–15 May 2019; pp. 1–4. [Google Scholar]
- Muzaffar, S.; Elfadel, I.M. Sensor Array for Consolidated Force Measurement. U.S. Patent Application Number US20200003643A1, 2 January 2020. [Google Scholar]
- Lumen Learning. Elasticity: Stress and Strain. Available online: https://courses.lumenlearning.com/physics/chapter/5-3-elasticity-stress-and-strain/ (accessed on 1 May 2020).
- OpenMP. The OpenMP API Specification for Parallel Programming. Available online: https://www.openmp.org/ (accessed on 1 May 2020).
- SingleTact. SingleTact Miniature Force Sensors. Available online: https://www.singletact.com/ (accessed on 1 May 2020).
- Palmer, H.B. Capacitance of a Parallel-plate Capacitor by the Schwartz- Christoffel Transformation. Trans. Am. Inst. Electr. Eng. 1937, 56, 363–366. [Google Scholar] [CrossRef]
- Baeuscher, M.; Wang, B.; Hu, X.; Mackowiak, P.; Merchau, N.; Ehrmann, O.; Schneider-Ramelow, M.; Lang, K.-D.; Ngo, H.D. Simulation And Electrical Characterization Of A Novel 2D-Printed Incontinence Sensor With Conductive Polymer PEDOT:PSS For Medical Applications. In Proceedings of the 2018 IEEE 20th Electronics Packaging Technology Conference (EPTC), Singapore, 4–7 December 2018; pp. 565–572. [Google Scholar]
- Rao, K.S.; Sailaja, B.V.S.; Sravani, K.G.; Vineetha, K.V.; Kumar, P.A.; Prathyusha, D.; Sai Lakshmi, G.; Gopi Chand, C.H.; Guha, K. New Analytical Capacitance Modeling of the Perforated Switch Considering the Fringing Effect. IEEE Access 2019, 7, 27026–27036. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cancer | HIV/AIDS | Congestive Heart Failure | Fluid Retention (Oedema) |
| Diabetes, type 1/2 | Anemia | Crohn’s disease | Tuberculosis |
| Hyperthyroidism | Chronic kidney disease | Peptic ulcer | Emphysema |
| Hypothyroidism | Ulcerative colitis | Polycystic ovary syndrome | Parkinson’s disease |
| Cystic fibrosis | Interstitial lung disease | Metabolic syndrome | Bowel disease |
| Thalassemia | Celiac disease | Lung cancer (non small cell) | Hypopituitarism |
| Multiple sclerosis | Malnutrition | Aortic aneurysm (abdomen) | Endocarditis |
| Helicobacter pylori infection | Addison’s Disease | Chronic obstructive pulmonary | Muscle loss |
| Sarcoidosis | Coeliac disease | Enzyme deficiencies | Anorexia |
| Hypercalcemia | Dementia | Cushing’s syndrome | Depression |
| Bulimia | Grief reaction | Excessive stress |
| Ref Number | Sensor Used | Sensing Mechanism | Insole/External Shoe Frame | GRF Collection | Application | BWM a | CSD b | Technology Readiness |
|---|---|---|---|---|---|---|---|---|
| [5] | FSR array | Piezoresistive | Insole | Total | Biomechanics Lab | No | No | Commercial |
| [7] | FSR+LEDs | Piezoresistive+Optical | External | Total | Gait Analysis | No | No | Lab Prototype |
| [8] | FSR | Piezoresistive | Insole | Partial | Lifestyle Weight Monitoring | Yes | No | Lab Prototype |
| [9] | FSR | Piezoresistive | Insole | Partial | Estimation of Carried Load | Yes | No | Lab Prototype |
| [11] | FSR | Piezoresistive | Insole | Partial | Gait Recognition | No | No | Research |
| [12] | FSR | Piezoresistive | Insole | Partial | Gait Monitoring | No | No | Research |
| [13] | FSR | Piezoresistive | Insole | Partial | Vertical GRF Estimation | No | No | Research |
| [14] | FSR | Piezoresistive | Insole | Partial | Physical Therapy | No | No | Research |
| [15] | FSR | Piezoresistive | Insole | Partial | Stance Phase Recognition | No | No | Research |
| [16] | FSR | Piezoresistive | Insole | Partial | Low-cost GRF and CoP | No | No | Research |
| [17] | FSR | Piezoresistive | Insole | Partial | Gait Analysis | No | No | Research |
| [18] | FSR | Piezoresistive | Insole | Partial | Motion Analysis | No | No | Research |
| [19] | Pressure Sensors c | Probbaly Piezoresistive | Insole | Partial | Real-time Gait Analysis | No | No | Licensed |
| [20] | Pressure Sensors c | Probbaly Piezoresistive | Insole | Partial | Running Coach | No | Yes | Commercial |
| [21] | Pressure Sensors c | Probbaly Piezoresistive | Socks | Partial | Personal Trainer | No | Yes | Commercial |
| [22] | Pressure Sensors c | Probbaly Piezoresistive | Insole | Partial | Health Analytics | No | No | Commercial |
| [23] | Pressure Sensors c | Probbaly Piezoresistive | Insole | Partial | Healthcare /Sports | No | Yes | Commercial |
| [24] | 3-D tactile sensor array | Piezoresistive | External | Total | Tria-axial GRF | No | Yes | Research |
| [25] | Air pressure sensors | Air pressure | Insole d | Total | Gait Monitoring | No | No | Lab Prototype |
| [26] | Air pressure sensors | Air pressure | Insole d | Total | Activity Recognition | No | No | Lab Prototype |
| [27] | Fiber-optic force sensor | Intensity of light | External | Total | Biomechnaical Measurement | No | No | Research |
| [28] | Triaxial force sensors | Probably Piezoelectric | External | Total | Gait Variability Measurement | No | No | Research |
| [32] | Foam Sensors | Piezoelectric | Insole | Total | GRF during Walking | Yes | Yes | Lab Prototype |
| [29] | FSR | Piezoresistive | Insole | Total | GRF and Center of Pressure | No | No | Research |
| [30] | Optical Sensors | Intensity of light | Insole | Total | GRF during Jumping/Running | No | No | Research |
| [31] | Plantar Pressure (as in [5]) | Probably Piezoresistive | Insole | Total | 3D GRF and Frictional Torque | No | No | Lab Prototype |
| This Work | FSR | Piezoresistive | External | Total | Medical Weight Monitoring | Yes | Yes | Lab Prototype |
| Transduction Mechanisms | Physical Property | Equation | Symbols |
|---|---|---|---|
| Capacitive | Capacitance | : Permittivity of free space : Relative dielectric constant | |
| Piezoelectric | Current | : Piezoelectric constant in the direction of force f: Force Frequency, Y: Young’s Modulus | |
| Piezoresistive | Resistance | : Resistivity |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muzaffar, S.; Elfadel, I.M. Shoe-Integrated, Force Sensor Design for Continuous Body Weight Monitoring. Sensors 2020, 20, 3339. https://doi.org/10.3390/s20123339
Muzaffar S, Elfadel IM. Shoe-Integrated, Force Sensor Design for Continuous Body Weight Monitoring. Sensors. 2020; 20(12):3339. https://doi.org/10.3390/s20123339
Chicago/Turabian StyleMuzaffar, Shahzad, and Ibrahim (Abe) M. Elfadel. 2020. "Shoe-Integrated, Force Sensor Design for Continuous Body Weight Monitoring" Sensors 20, no. 12: 3339. https://doi.org/10.3390/s20123339
APA StyleMuzaffar, S., & Elfadel, I. M. (2020). Shoe-Integrated, Force Sensor Design for Continuous Body Weight Monitoring. Sensors, 20(12), 3339. https://doi.org/10.3390/s20123339