Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
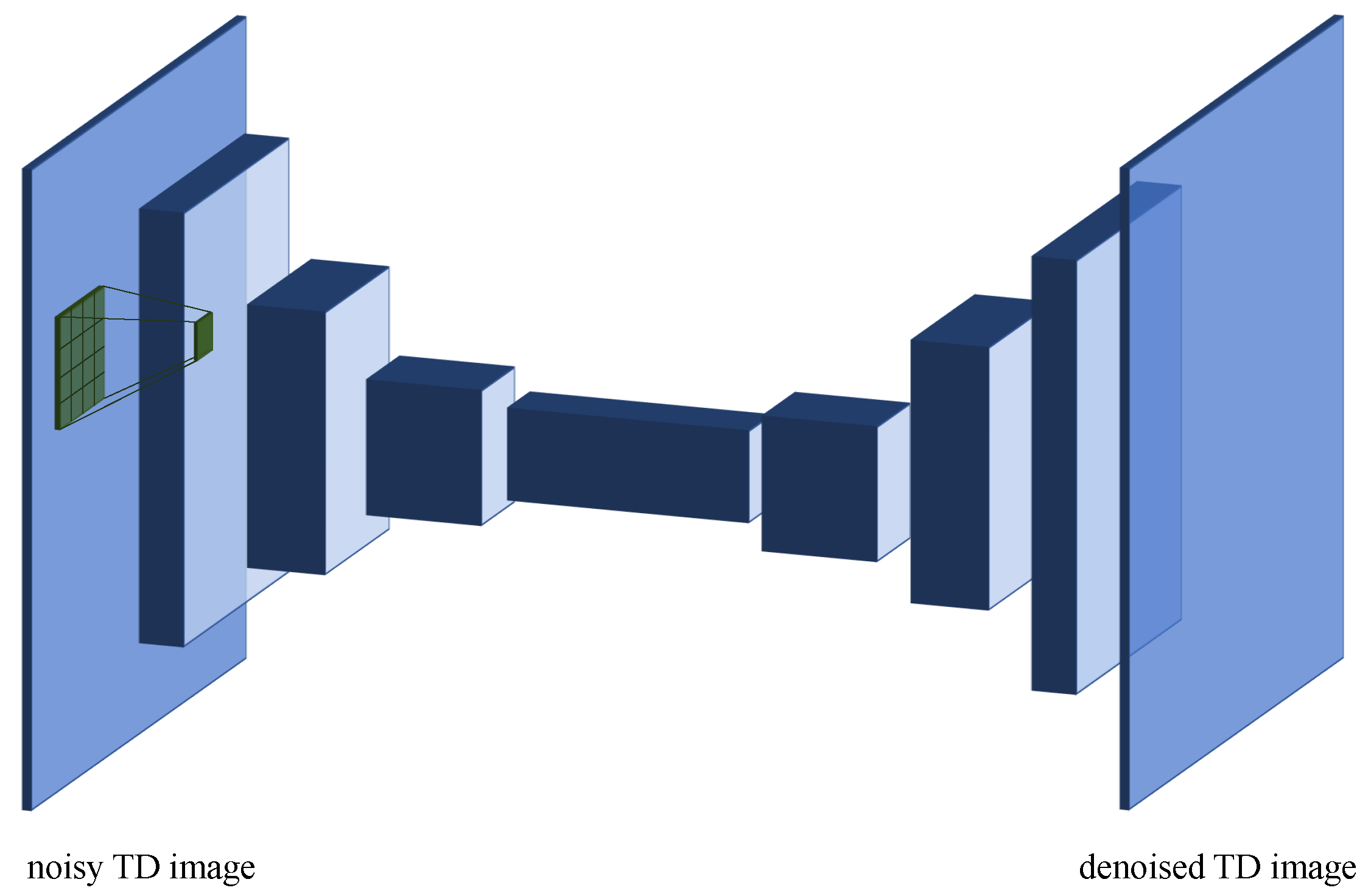
- Develop a convolutional denosing autoencoder architecture for the detection of curved lines within a reflection (TD) image.
- Implement a computationally efficient method that combines deep learning pre-processing with a probabilistic algorithm applied over a track-before-detect approach.
- Create a statistically large-enough database containing clutter and reflections of acoustic patterns, which we freely share with the community for reproducibility and further research.
2. Related Work
3. Problem Formulation
3.1. System Model
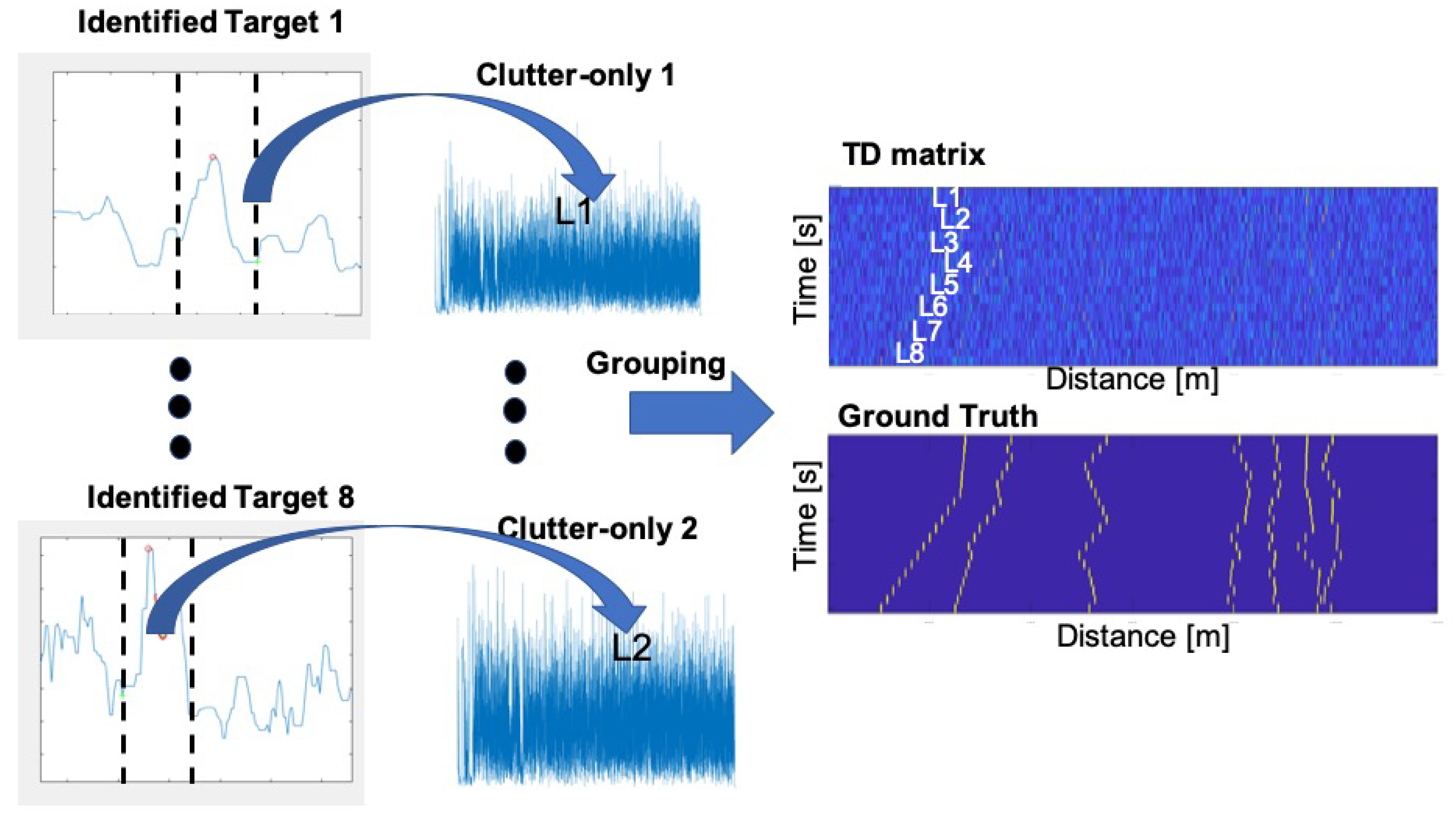
3.2. Data Description
4. Detection and Tracking Methodology
4.1. Convolutional Denoising Autoencoder (CDA)
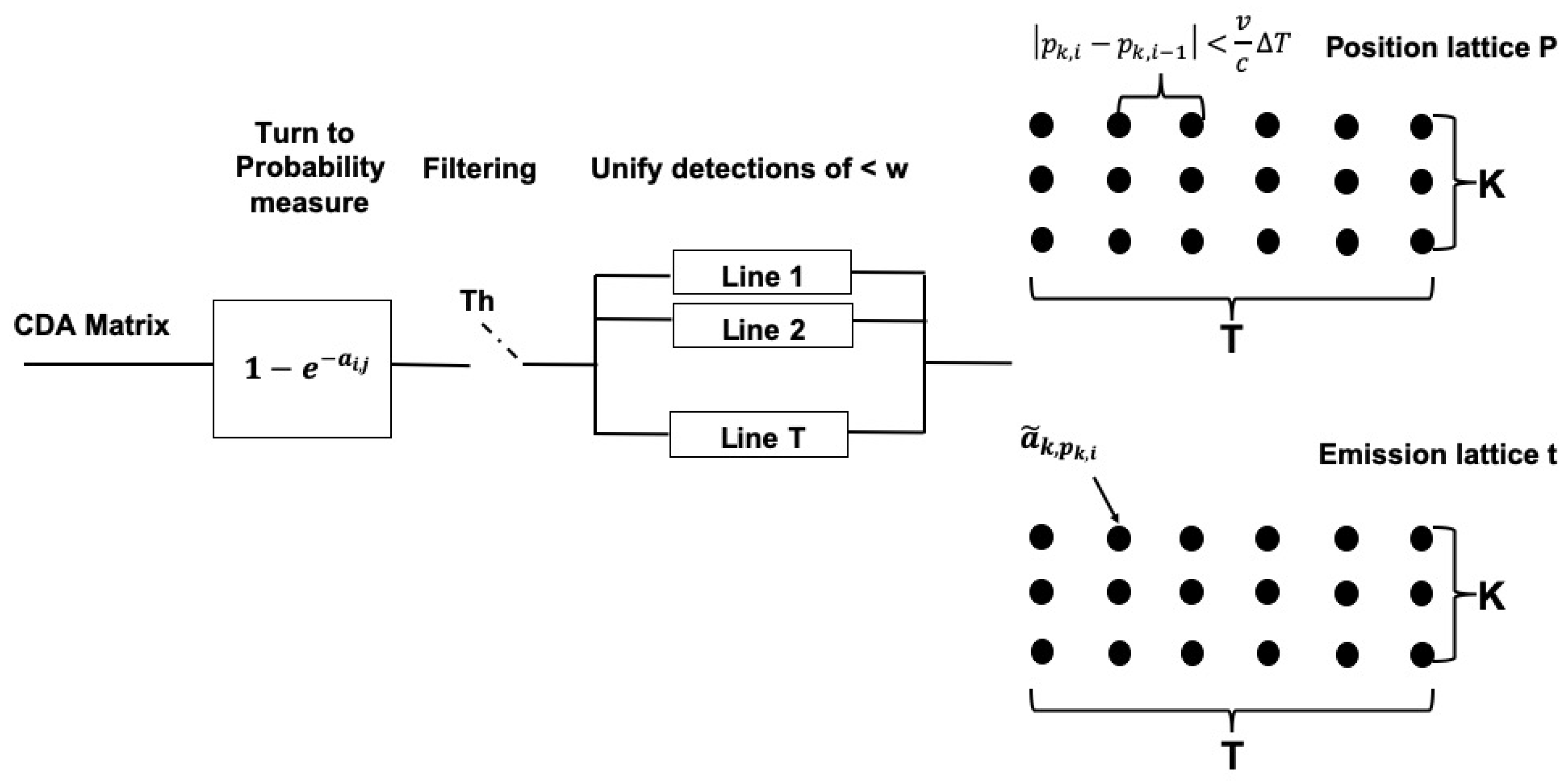
4.2. Detection through Dynamic Programming
4.2.1. Tracking
4.2.2. Detection
4.3. Computational Complexity
5. Results
5.1. Representative Results and Sea Trial Demonstration
5.2. Statistical Analysis
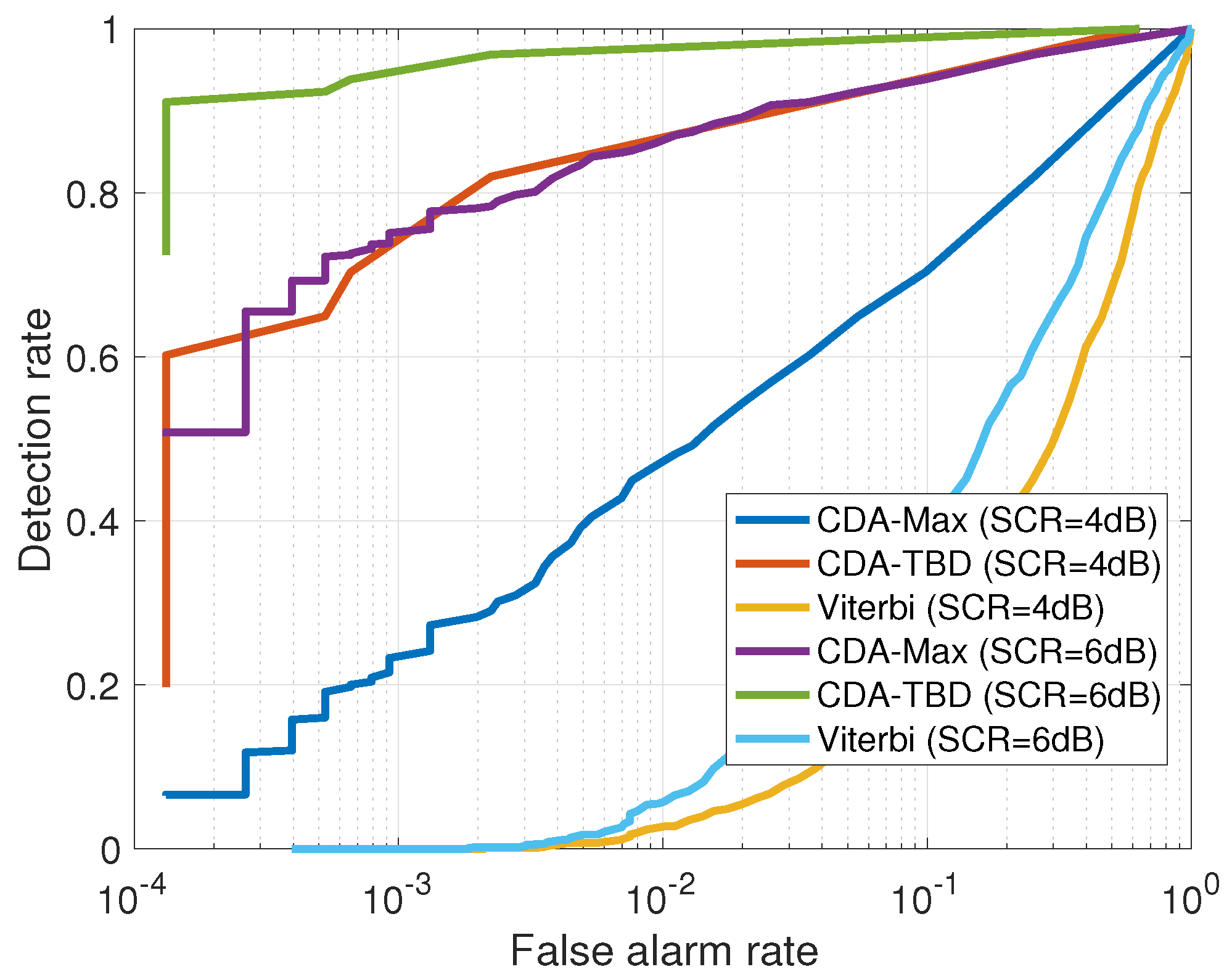
5.2.1. Detection Performance
5.2.2. Tracking Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bertrand, A.; Josse, E. Acoustic estimation of longline tuna abundance. ICES J. Mar. Sci. 2000, 57, 919–926. [Google Scholar] [CrossRef]
- Ketten, D.R. Experimental Measures of Blast and Acoustic Trauma in Marine Mammals; Technical Report; Woods Hole Oceanographic Institution, Biology Department: Woods Hole, MA, USA, 2004. [Google Scholar]
- Parsons, M.J.; Parnum, I.; Allen, K.; McCauley, R.; Erbe, C. Detection of sharks with the Gemini imaging SONAR. Acoust. Aust. 2014, 42, 185–189. [Google Scholar]
- Bakir, N.O. A brief analysis of threats and vulnerabilities in the maritime domain. In Managing Critical Infrastructure Risks; Springer: Berlin/Heidelberg, Germany, 2007; pp. 17–49. [Google Scholar]
- Davey, S.; Rutten, M.; Cheung, B. A comparison of detection performance for several Track-Before-Detect algorithms. In Proceedings of the International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008. [Google Scholar]
- Willett, P.; Coraluppi, S. Application of the MLPDA to bistatic sonar. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2005; pp. 2063–2073. [Google Scholar]
- Jing, C.; Lin, Z.; Li, J. Detection and tracking of an underwater target using the combination of a particle filter and track-before-detect. In Proceedings of the IEEE OCEANS, Shanghai, China, 10–13 April 2016. [Google Scholar]
- Wei, M.; Shi, B.; Hao, C.; Yan, S. A Novel Weak Target Detection Strategy for Moving Active SONAR. In Proceedings of the IEEE OCEANS, Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Schoenecker, S.; Willett, P.; Bar-Shalom, Y. Resolution Limits for Tracking Closely-Spaced Targets. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2900–2910. [Google Scholar] [CrossRef]
- Wang, J.; von Trojan, A.; Lourey, S. Active sonar target tracking for anti-submarine warfare applications. In Proceedings of the IEEE OCEANS, Seattle, WA, USA, 20–23 September 2010. [Google Scholar]
- Diamant, R.; Kipnis, D.; Bigal, E.; Scheinin, A.; Tchernov, D.; Pinchasi, A. An Active Acoustic Track-Before-Detect Approach for Finding Underwater Mobile Targets. IEEE J. Sel. Top. Signal Process. 2019, 13, 104–119. [Google Scholar] [CrossRef]
- Yi, W.; Morelande, M.R.; Kong, L.; Yang, J. An efficient multi-frame track-before-detect algorithm for multi-target tracking. IEEE J. Sel. Top. Signal Process. 2013, 7, 421–434. [Google Scholar] [CrossRef]
- Jiang, H.; Yi, W.; Kirubarajan, T.; Kong, L.; Yang, X. Multiframe radar detection of fluctuating targets using phase information. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 736–749. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Hinton, G.; Deng, L.; Yu, D.; Dahl, G.; Mohamed, A.R.; Jaitly, N.; Senior, A.; Vanhoucke, V.; Nguyen, P.; Kingsbury, B.; et al. Deep neural networks for acoustic modeling in speech recognition. IEEE Signal Process. Mag. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Takamichi, S.; Saito, Y.; Takamune, N.; Kitamura, D.; Saruwatari, H. Phase reconstruction from amplitude spectrograms based on directional-statistics deep neural networks. Signal Process. 2020, 169, 107368. [Google Scholar] [CrossRef]
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.A. Stacked denoising autoencoders: Learning useful representations in a deep network with a local denoising criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Testolin, A.; Diamant, R. Underwater Acoustic Detection and Localization with a Convolutional Denoising Autoencoder. In Proceedings of the IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Le Gosier, Guadeloupe, 15–18 December 2019. [Google Scholar]
- Bates, J.R.; Grimmett, D.; Canepa, G.; Tesei, A. Towards Doppler estimation and false alarm rejection for Continuous Active Sonar. J. Acoust. Soc. Am. 2018, 143, 1972. [Google Scholar] [CrossRef]
- Renard, J.; Lampe, L.; Horlin, F. Sequential Likelihood Ratio Test for Cognitive Radios. IEEE Trans. Signal Process. 2016, 64, 6627–6639. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gerlach, K.R. Coherent detection of radar targets in a non-Gaussian background. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 330–340. [Google Scholar] [CrossRef]
- Tropp, J.; Gilbert, A. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Desai, M.; Mangoubi, R. Robust Gaussian and Non-Gaussian Matched Subspace Detection. IEEE Trans. Signal Process. 2003, 51, 3115–3127. [Google Scholar] [CrossRef]
- Lau, K.; Salibian-Barrera, M.; Lampe, L. Modulation recognition in the 868 MHz band using classification trees and random forests. AEU—Int. J. Electron. Commun. 2016, 70, 1321–1328. [Google Scholar] [CrossRef]
- Schoenecker, S.; Willett, P.; Bar-Shalom, Y. ML-PDA and ML-PMHT: Comparing Multistatic Sonar Trackers for VLO Targets Using a New Multitarget Implementation. IEEE J. Ocean. Eng. 2014, 39, 303–317. [Google Scholar] [CrossRef]
- Jauffret, C.; Bar-Shalom, Y. Track formation with bearing and frequency measurements in clutter. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 999–1010. [Google Scholar] [CrossRef]
- Blanding, W.; Willett, P.; Coraluppi, S. Sequential ML for Multistatic Sonar Tracking. In Proceedings of the OCEANS, Aberdeen, UK, 18–21 June 2007. [Google Scholar]
- Streit, R.; Luginbuhl, T. Maximum likelihood method for probabilistic multihypothesis tracking. In Proceedings of the Signal and Data Processing of Small Targets, Orlando, FL, USA, 5–7 April 1994; Volume 2235, pp. 394–406. [Google Scholar]
- Davey, S.; Wieneke, M.; Vu, H. Histogram-PMHT Unfettered. IEEE J. Sel. Top. Signal Process. 2013, 7, 435–447. [Google Scholar] [CrossRef]
- Vu, H.; Davey, S.; Fetcher, F.; Arulampalam, S.; Ellem, R.; Lim, C. Track-Before-Detect for an Active Towed Array SONAR. In Proceedings of the Acoustics, Victor Harbor, Australia, 17–20 November 2013. [Google Scholar]
- Gaetjens, H.; Davey, S.; Arulampalam, S.; Fletcher, F.; Lim, C. Histogram-PMHT for fluctuating target models. IET Radar Sonar Navig. 2017, 11, 1292–1301. [Google Scholar] [CrossRef]
- Schoenecker, S.; Willett, P.; Bar-Shalom, Y. The Effect of K-Distributed Clutter on Trackability. IEEE Trans. Signal Process. 2016, 64, 475–484. [Google Scholar] [CrossRef]
- Yu, D.; Deng, L. Deep learning and its applications to signal and information processing [exploratory dsp]. IEEE Signal Process. Mag. 2010, 28, 145–154. [Google Scholar] [CrossRef]
- Testolin, A.; Stoianov, I.; De Filippo De Grazia, M.; Zorzi, M. Deep unsupervised learning on a desktop PC: A primer for cognitive scientists. Front. Psychol. 2013, 4, 251. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Grosse, R.; Ranganath, R.; Ng, A.Y. Convolutional deep belief networks for scalable unsupervised learning of hierarchical representations. In Proceedings of the 26th Annual International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 609–616. [Google Scholar]
- Palangi, H.; Ward, R.; Deng, L. Convolutional deep stacking networks for distributed compressive sensing. Signal Process. 2017, 131, 181–189. [Google Scholar] [CrossRef]
- Zorzi, M.; Zanella, A.; Testolin, A.; De Grazia, M.D.F.; Zorzi, M. Cognition-based networks: A new perspective on network optimization using learning and distributed intelligence. IEEE Access 2015, 3, 1512–1530. [Google Scholar] [CrossRef]
- De Grazia, M.D.F.; Zucchetto, D.; Testolin, A.; Zanella, A.; Zorzi, M.; Zorzi, M. QoE multi-stage machine learning for dynamic video streaming. IEEE Trans. Cogn. Commun. Netw. 2017, 4, 146–161. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Z.Y.; Qin, W.L.; Ma, J. Fault diagnosis of rotary machinery components using a stacked denoising autoencoder-based health state identification. Signal Process. 2017, 130, 377–388. [Google Scholar] [CrossRef]
- Huang, W.; Ding, H.; Chen, G. A novel deep multi-channel residual networks-based metric learning method for moving human localization in video surveillance. Signal Process. 2018, 142, 104–113. [Google Scholar] [CrossRef]
- Baldi, P.; Sadowski, P.; Whiteson, D. Searching for exotic particles in high-energy physics with deep learning. Nat. Commun. 2014, 5, 4308. [Google Scholar] [CrossRef]
- Testolin, A.; Stoianov, I.; Zorzi, M. Letter perception emerges from unsupervised deep learning and recycling of natural image features. Nat. Hum. Behav. 2017, 1, 657–664. [Google Scholar] [CrossRef]
- Ferguson, E.L.; Ramakrishnan, R.; Williams, S.B.; Jin, C.T. Convolutional neural networks for passive monitoring of a shallow water environment using a single sensor. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 2657–2661. [Google Scholar]
- Kamal, S.; Mohammed, S.K.; Pillai, P.S.; Supriya, M. Deep learning architectures for underwater target recognition. In Proceedings of the 2013 Ocean Electronics (SYMPOL), Kochi, India, 23–25 October 2013; pp. 48–54. [Google Scholar]
- Hu, G.; Wang, K.; Peng, Y.; Qiu, M.; Shi, J.; Liu, L. Deep learning methods for underwater target feature extraction and recognition. Comput. Intell. Neurosci. 2018, 2018. [Google Scholar] [CrossRef] [PubMed]
- Diamant, R. Closed form analysis of the normalized matched filter with a test case for detection of underwater acoustic signals. IEEE Access 2016, 4, 8225–8235. [Google Scholar] [CrossRef]
- Tremblay, J.; Prakash, A.; Acuna, D.; Brophy, M.; Jampani, V.; Anil, C.; To, T.; Cameracci, E.; Boochoon, S.; Birchfield, S. Training deep networks with synthetic data: Bridging the reality gap by domain randomization. arXiv 2018, arXiv:1804.06516. [Google Scholar]
- Shrivastava, A.; Pfister, T.; Tuzel, O.; Susskind, J.; Wang, W.; Webb, R. Learning from simulated and unsupervised images through adversarial training. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2107–2116. [Google Scholar]
- Salamon, J.; Bello, J.P. Deep convolutional neural networks and data augmentation for environmental sound classification. IEEE Signal Process. Lett. 2017, 24, 279–283. [Google Scholar] [CrossRef]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Maji, P.; Mullins, R. On the Reduction of Computational Complexity of Deep Convolutional Neural Networks. Entropy 2018, 20, 305. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Testolin, A.; Diamant, R. Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets. Sensors 2020, 20, 2945. https://doi.org/10.3390/s20102945
Testolin A, Diamant R. Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets. Sensors. 2020; 20(10):2945. https://doi.org/10.3390/s20102945
Chicago/Turabian StyleTestolin, Alberto, and Roee Diamant. 2020. "Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets" Sensors 20, no. 10: 2945. https://doi.org/10.3390/s20102945
APA StyleTestolin, A., & Diamant, R. (2020). Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets. Sensors, 20(10), 2945. https://doi.org/10.3390/s20102945