Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes

 ,
,
Abstract
1. Introduction
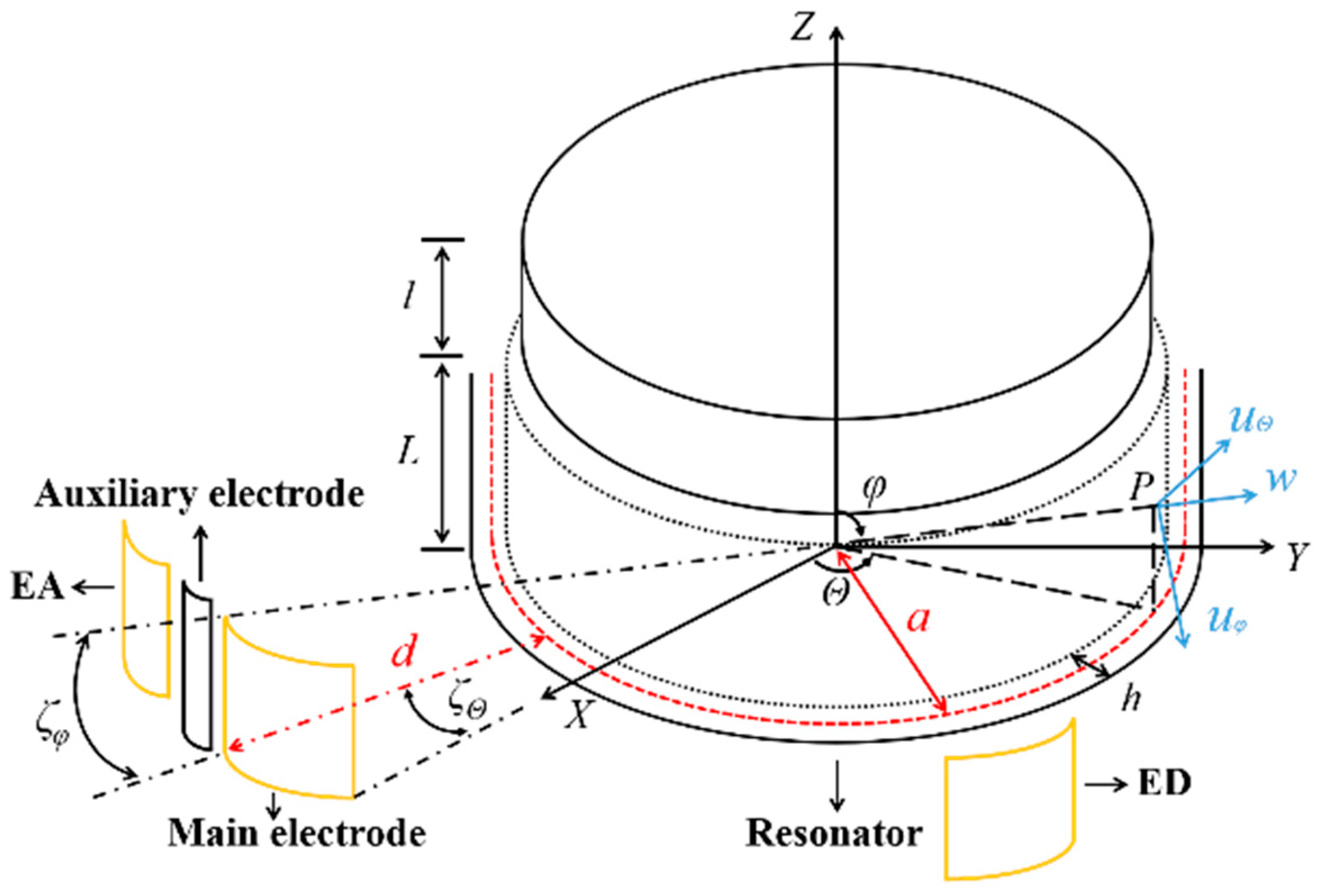
2. Theoretical Analysis
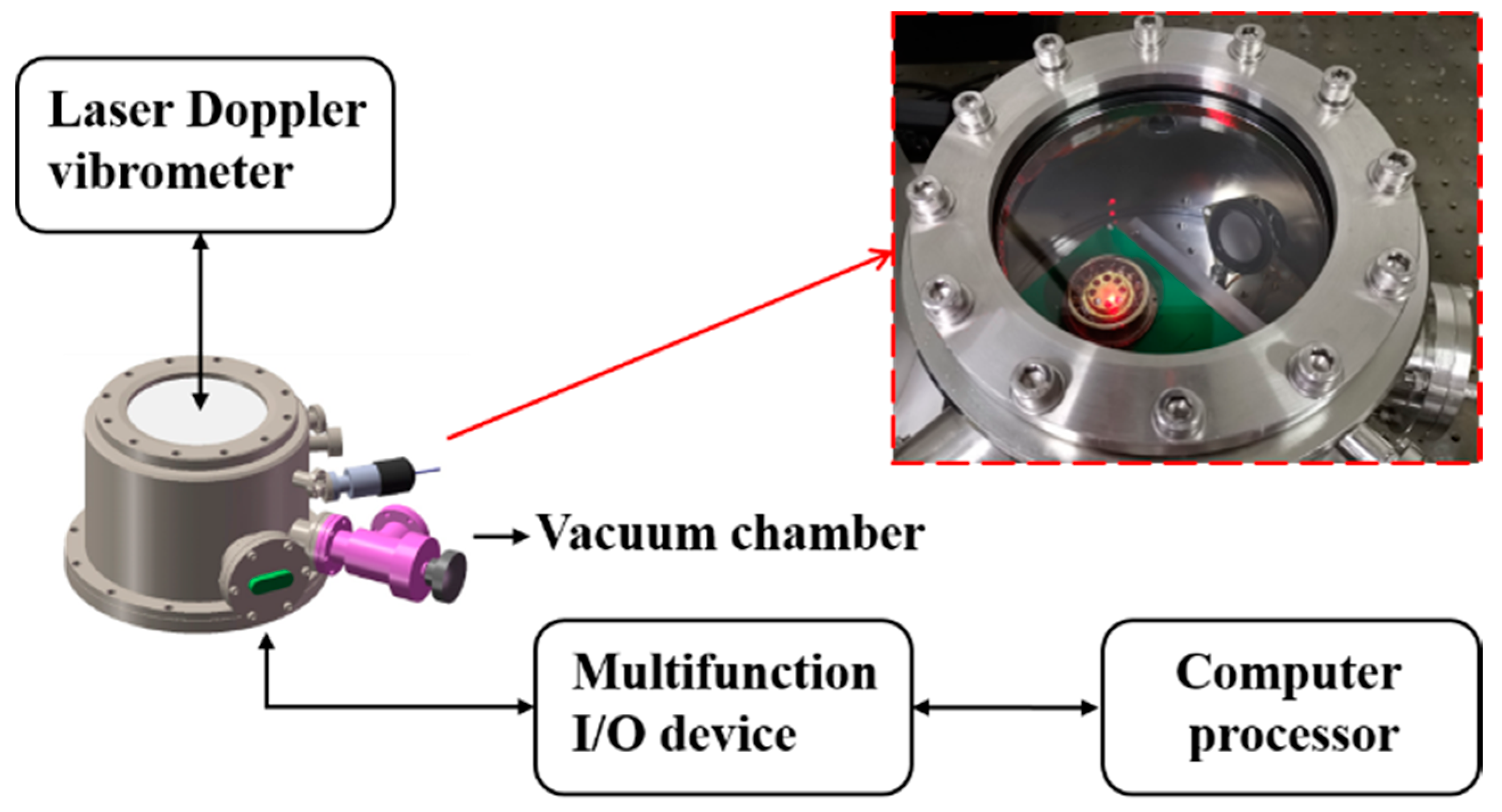
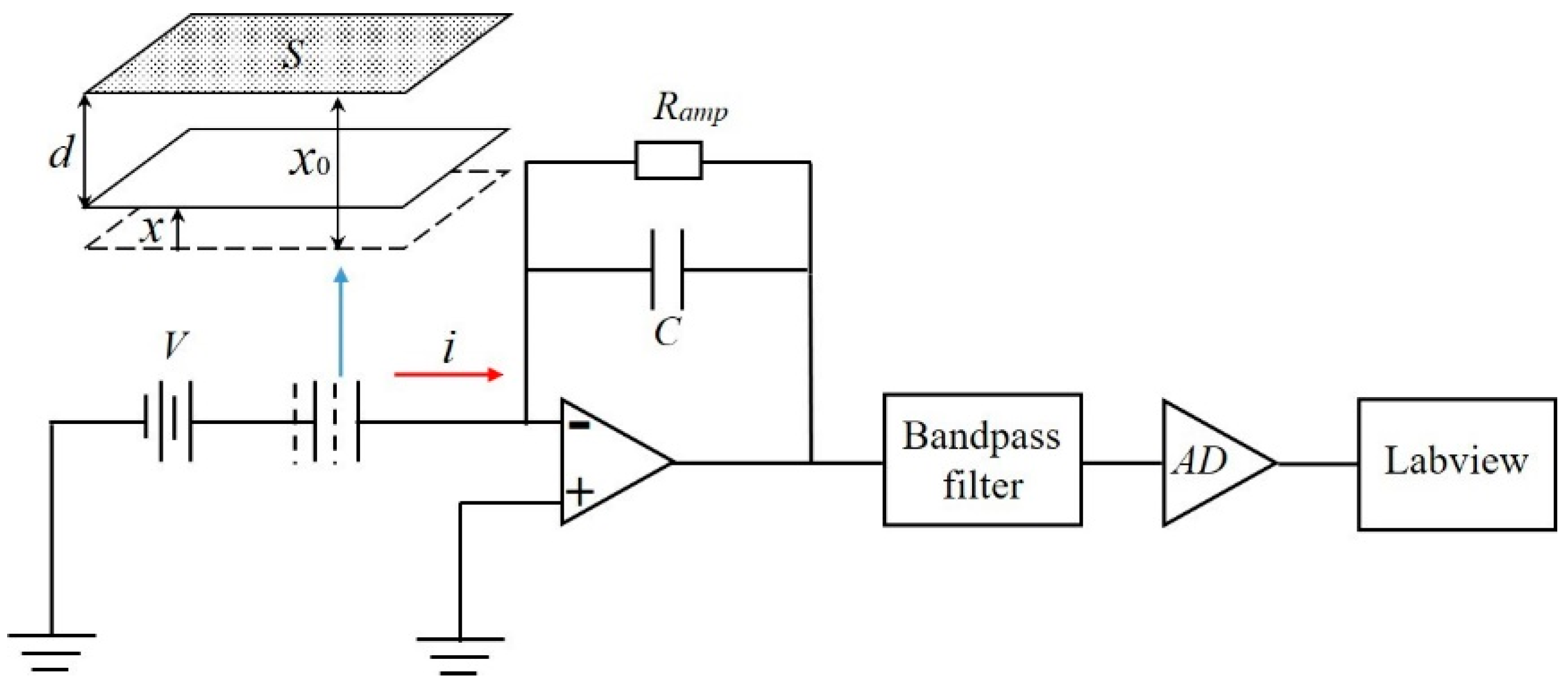
3. Experiments and Methods
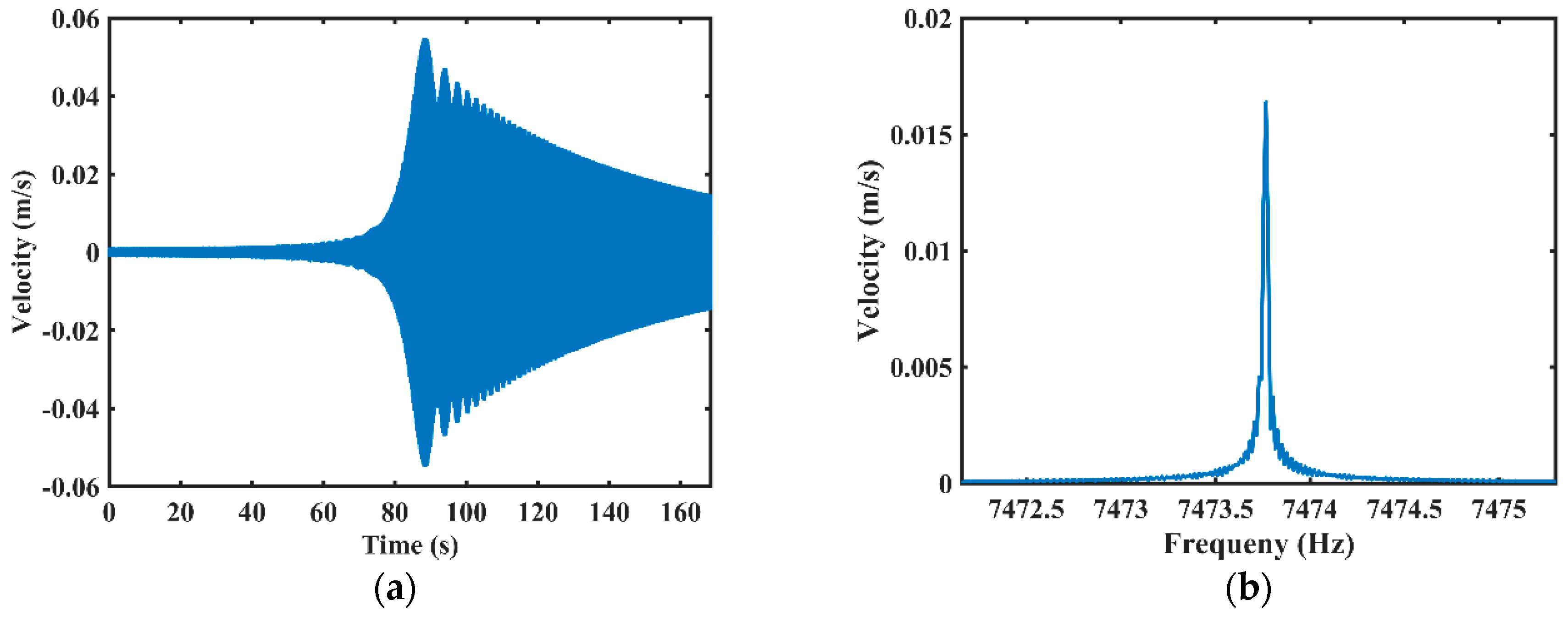
3.1. Vibrational Characteristics without Electrostatic Influence
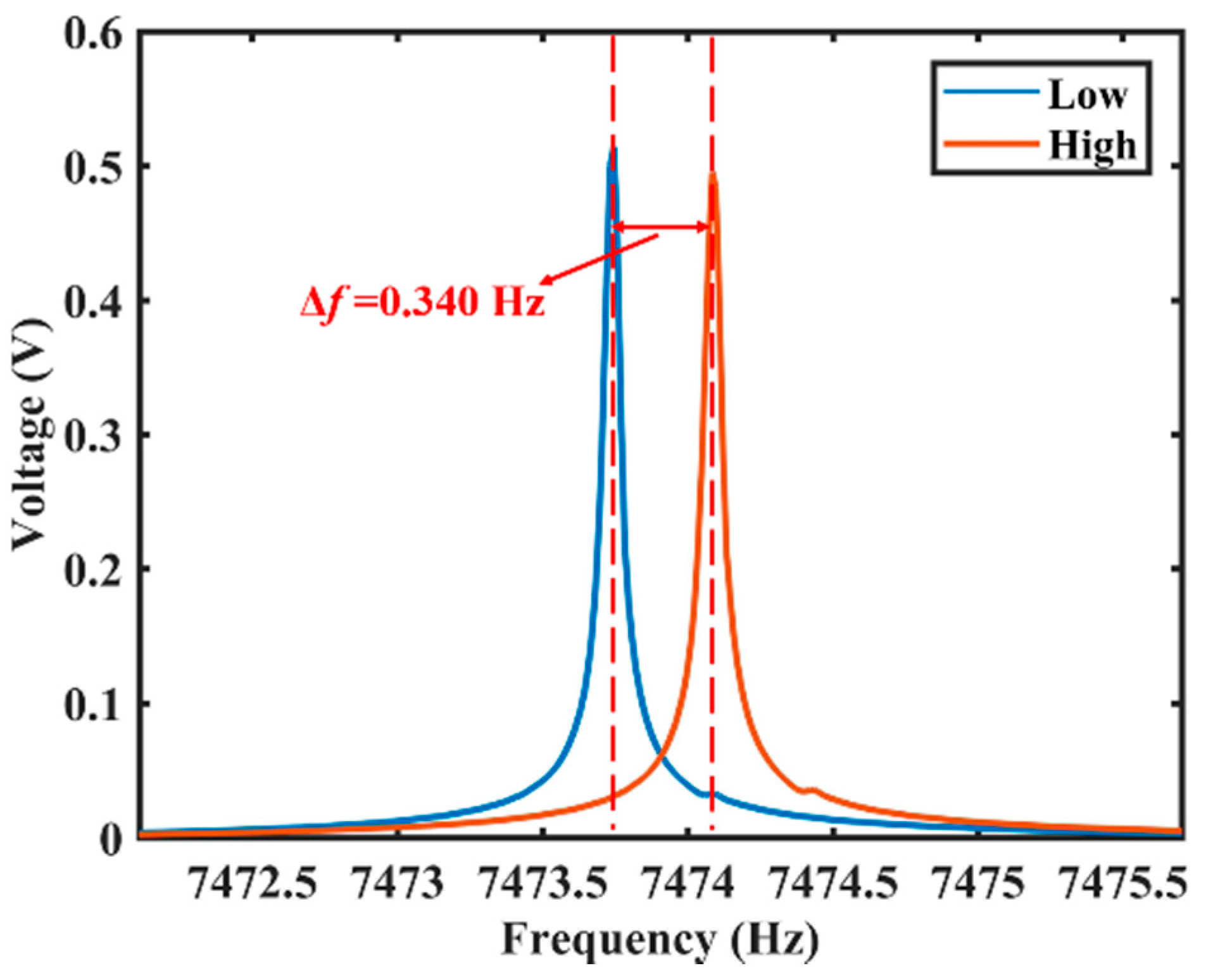
3.2. Vibrational Characteristics with Electrostatic Influence
4. Results and Discussion
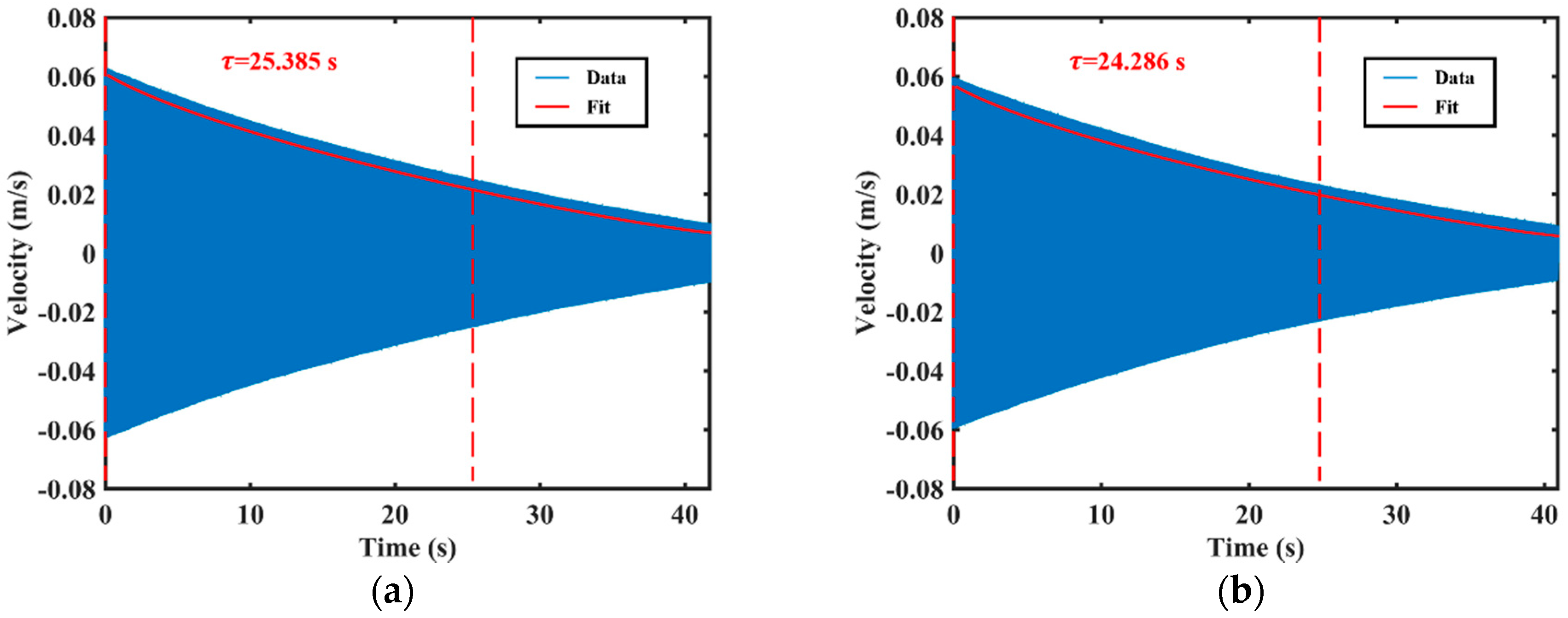
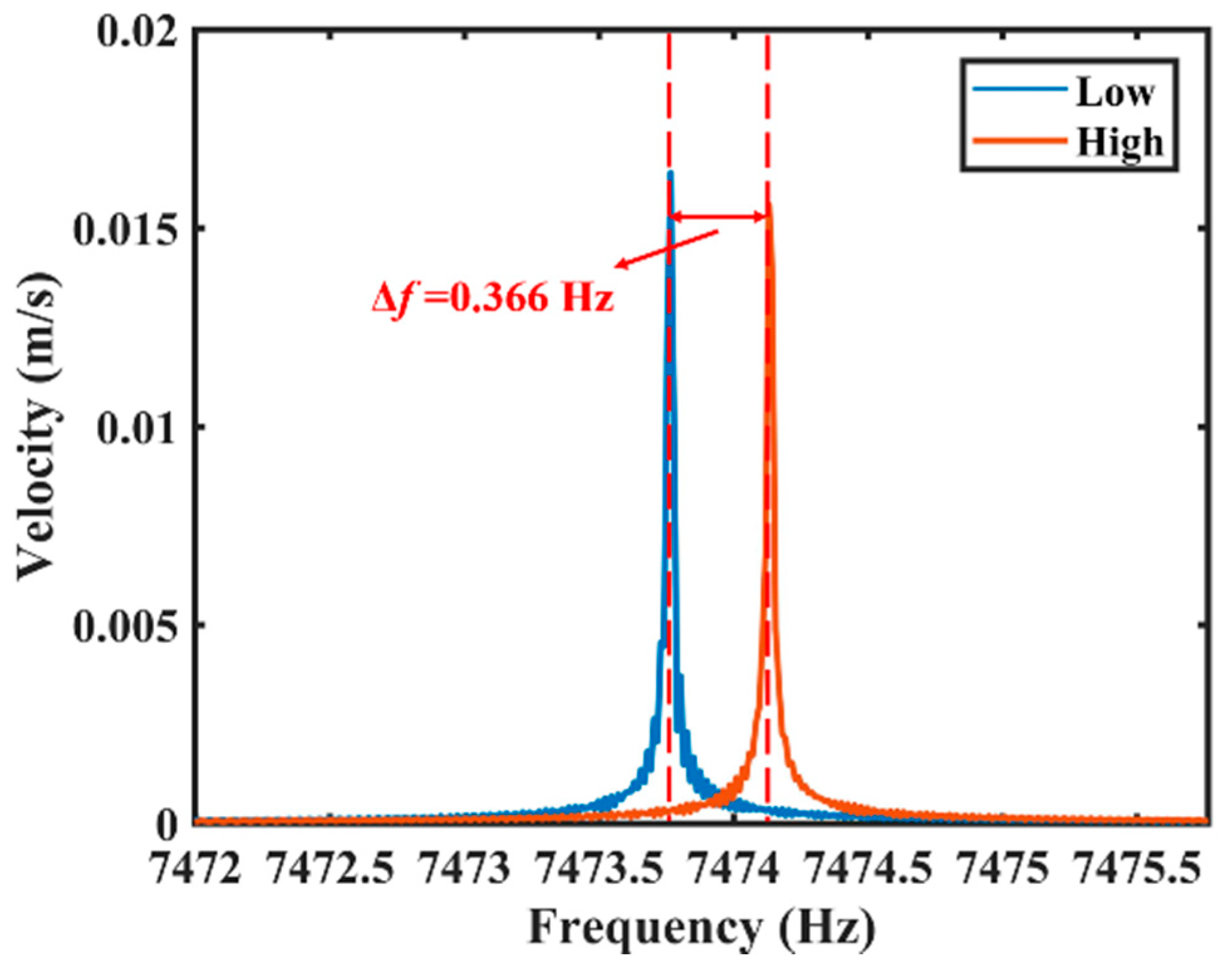
4.1. Vibrational Characteristics in Measurements
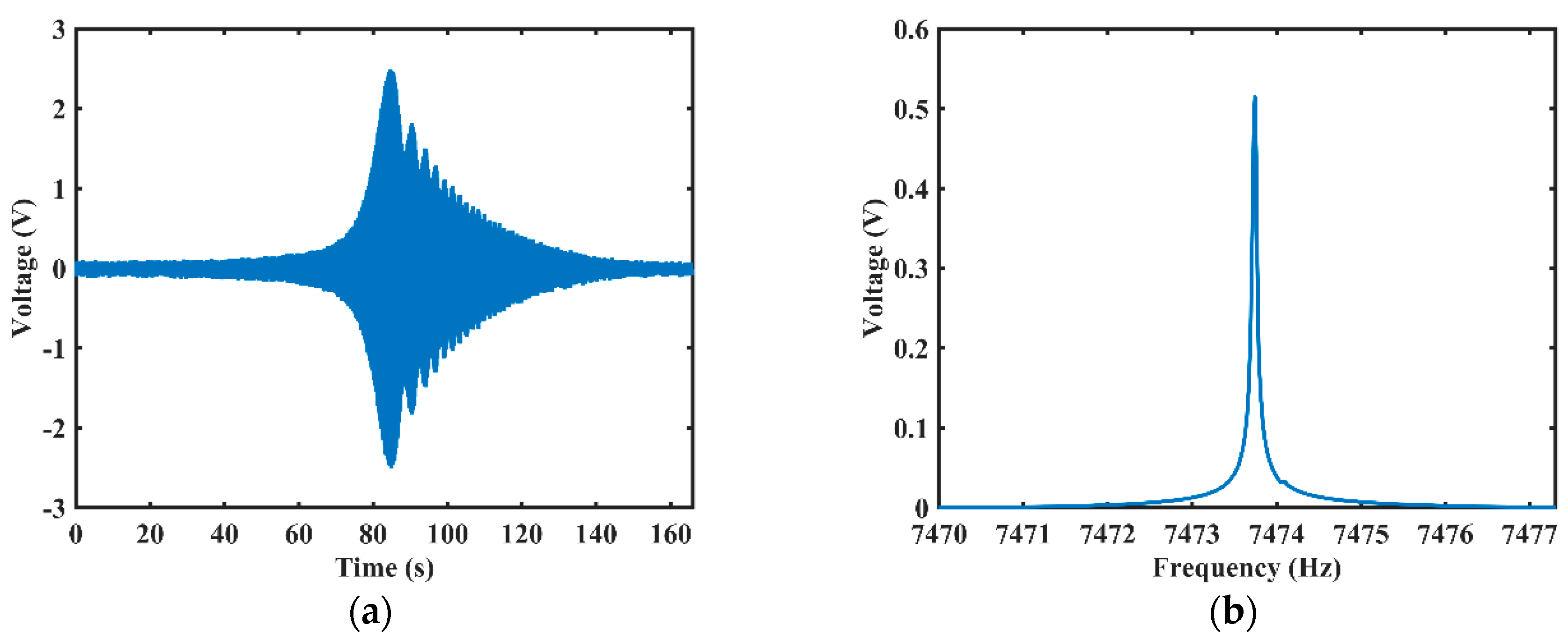
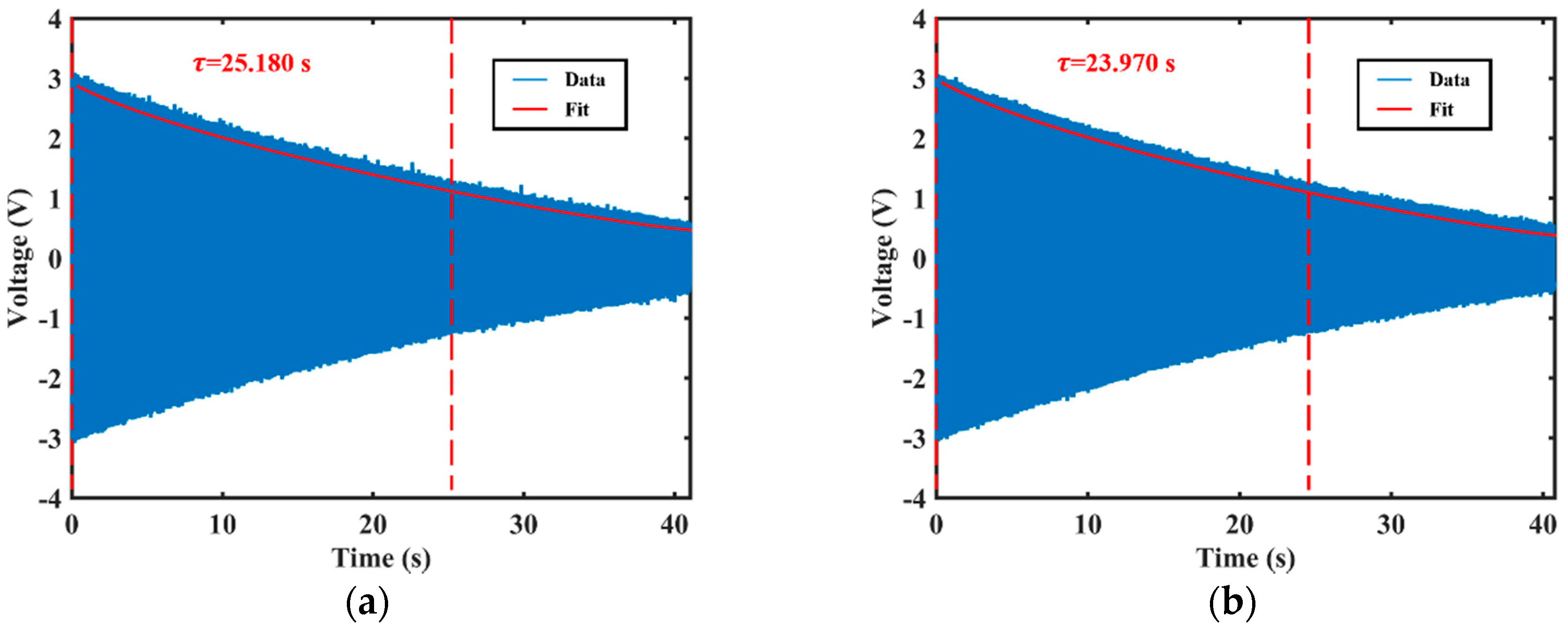
4.2. Vibrational Characteristics in Practice
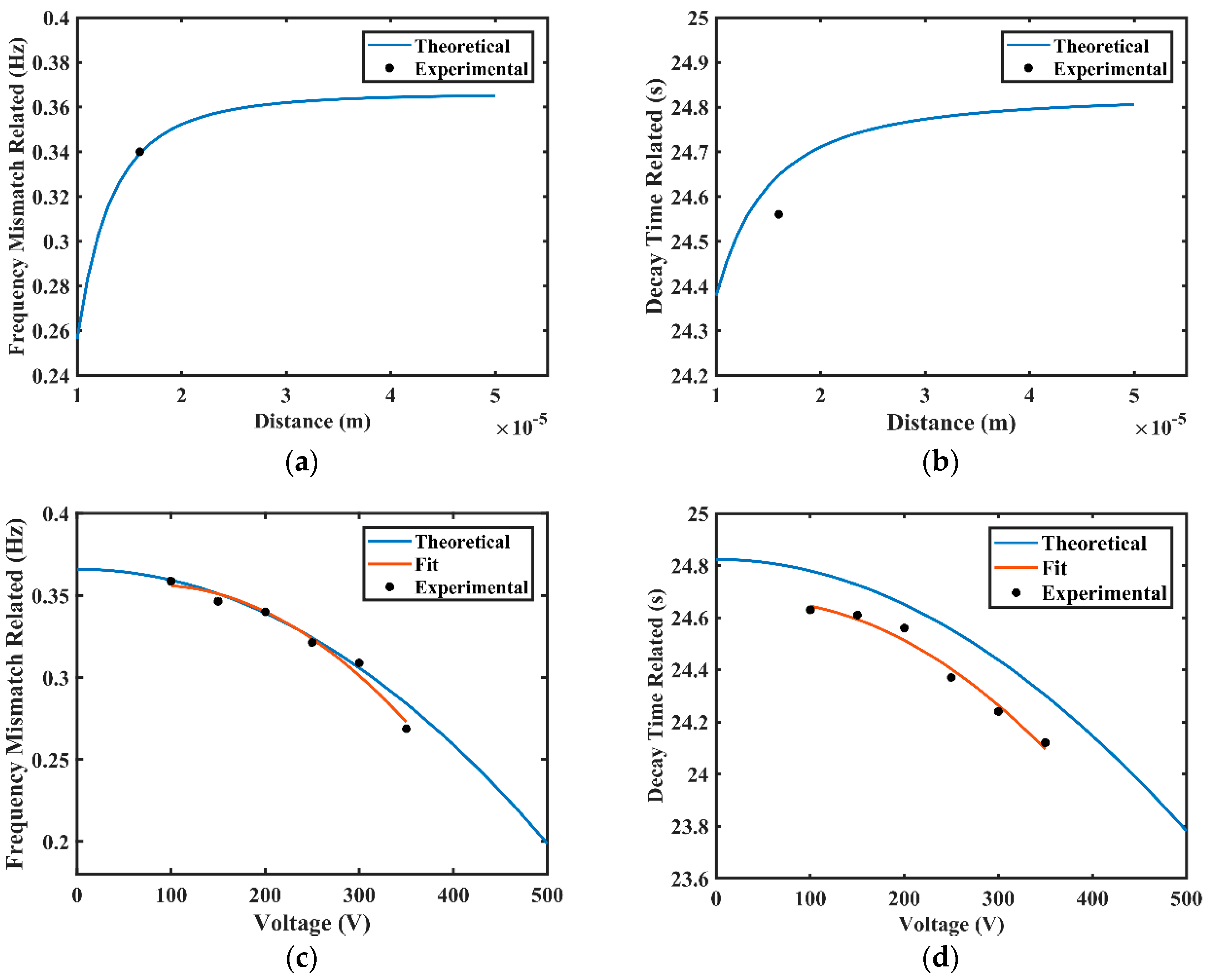
4.3. Results and Comparisons between Analysis and Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Chikovani, V.; Okon, I.; Barabashov, A.; Tewksbury, P. A set of high accuracy low cost metallic resonator CVG. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 238–243. [Google Scholar]
- Chikovani, V.; Yatsenko, Y.A.; Barabashov, A.; Marusyk, P.; Umakhanov, E.; Taturin, V.J.I.A.; Magazine, E.S. Improved accuracy metallic resonator CVG. IEEE Aerosp. Electron. Syst. Mag. 2009, 24, 40–43. [Google Scholar] [CrossRef]
- Yatsenko, Y.A.; Petrenko, S.; Vovk, V.; Chikovani, V. Technological aspects of manufacturing of compound hemispherical resonators for small-sized vibratory gyroscopes. In Proceedings of the 6th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 24–26 May 1999. [Google Scholar]
- Rozelle, D.M. The hemispherical resonator gyro: From wineglass to the planets. In Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting, Savannah, Georgia, 8–12 February 2009; pp. 1157–1178. [Google Scholar]
- Watson, W.S. Vibratory gyro skewed pick-off and driver geometry. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 171–179. [Google Scholar]
- Sarapuloff, S. Development and cost reduction of high-Q dielectric resonators of solid-state gyroscopes. In Proceedings of the 8th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 28–30 May 2001; pp. 124–126. [Google Scholar]
- Sarapuloff, S. Dynamics of Precise Solid-State Gyroscopes of HRG and CRG Types. In Proceedings of the V-th Brazilian Symposium on Inertial Engineering (V SBEIN), Rio de Janeiro, Brazil, 27–29 November 2007; pp. 27–29. [Google Scholar]
- Chikovani, V.V.; Yatzenko, Y.A.; Kovalenko, V.A. Coriolis Force Gyroscope with High Sensitivity. U.S. Patent 7513156B2, 7 April 2009. [Google Scholar]
- Northrop Grumman Corporation. Available online: http://www.globenewswire.com/newsarchive/noc/press/pages/news_releases.html?d=10120447 (accessed on 5 September 2019).
- Zhang, F. Control and Self-Calibration of Microscale Rate Integrating Gyroscopes (MRIGs); UC Berkeley: Berkeley, CA, USA, 2015. [Google Scholar]
- Rozelle, D.; Meyer, A.; Trusov, A.; Sakaida, D. Milli-HRG inertial sensor assembly–a reality. In Proceedings of the 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS) Proceedings, Hapuna Beach, HI, USA, 23–26 March 2015; pp. 1–4. [Google Scholar]
- Jeanroy, A.; Grosset, G.; Goudon, J.-C.; Delhaye, F. HRG by Sagem from laboratory to mass production. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 Febuary 2016; pp. 1–4. [Google Scholar]
- Jeanroy, A.; Bouvet, A.; Remillieux, G.J.G.; Navigation. HRG and marine applications. Gyroscopy Navig. 2014, 5, 67–74. [Google Scholar] [CrossRef]
- Waston Industries. Available online: https://watson-gyro.com/product/rate-gyros/pro-gyro-rate-gyro/ (accessed on 27 August 2019).
- Innalabs. Available online: http://www.innalabs.com/en/products/gyroscopes/ (accessed on 5 September 2019).
- Qiu, Z.; Qu, T.; Pan, Y.; Jia, Y.; Fan, Z.; Yang, K.; Yuan, J.; Luo, H.J.S. Optical and Electrical Method Characterizing the Dynamic Behavior of the Fused Silica Cylindrical Resonator. Sensors 2019, 19, 2928. [Google Scholar] [CrossRef] [PubMed]
- Lee, E.Y.; Sensors, A.A.S.J.; Physical, A.A. 5.4-MHz single-crystal silicon wine glass mode disk resonator with quality factor of 2 million. Sens. Actuators A Phys. 2009, 156, 28–35. [Google Scholar] [CrossRef]
- Elsayed, M.Y.; Nabki, F. 18-MHz Silicon Lamé Mode Resonators With Corner and Central Anchor Architectures in a Dual-Wafer SOI Technology. J. Microelectromech. Syst. 2017, 26, 67–74. [Google Scholar] [CrossRef]
- Khine, L.; Palaniapan, M.; Wong, W.K. 6 MHz Bulk-Mode Resonator with Q Values Exceeding One Million. In Proceedings of the TRANSDUCERS 2007—2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007. [Google Scholar]
- Elsayed, M.Y.; Nabki, F. 870 000$ Q $-Factor Capacitive Lamé Mode Resonator With Gap Closing Electrodes Enabling 4.4 k $\Omega $ Equivalent Resistance at 50 V. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 717–726. [Google Scholar] [CrossRef]
- Johari, H.; Ayazi, F. High-frequency capacitive disk gyroscopes in (100) and (111) silicon. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems, Hyogo, Japan, 21–25 January 2007. [Google Scholar]
- Cicek, P.V.; Elsayed, M.; Nabki, F.; El-Gamal, M. A novel multi-level IC-compatible surface microfabrication technology for MEMS with independently controlled lateral and vertical submicron transduction gaps. J. Micromech. Microeng. 2017, 27, 115002. [Google Scholar] [CrossRef]
- Nabki, F.; Elsayed, M.Y.; El-Gamal, M.N. A combined comb/bulk mode gyroscope structure for enhanced sensitivity. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems, Taipei, Taiwan, 20–24 January 2013. [Google Scholar]
- Elsayed, M.Y.; Nabki, F. Piezoelectric Bulk Mode Disk Resonator Post-Processed for Enhanced Quality Factor Performance. J. Micromech. Microeng. 2017, 26, 75–83. [Google Scholar] [CrossRef]
- Piazza, G.; Stephanou, P.J.; Pisano, A.P. Piezoelectric Aluminum Nitride Vibrating Contour-Mode MEMS Resonators. J. Micromech. Microeng. 2006, 15, 1406–1418. [Google Scholar] [CrossRef]
- Gong, S.; Piazza, G. Design and Analysis of Lithium–Niobate-Based High Electromechanical Coupling RF-MEMS Resonators for Wideband Filtering. IEEE Trans. Microw. Theory Tech. 2013, 61, 403–414. [Google Scholar] [CrossRef]
- Thakar, V.; Rais-Zadeh, M. Temperature-compensated piezoelectrically actuated Lamé-mode resonators. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014. [Google Scholar]
- Green, E.I. The story of Q. Am. Sci. 1955, 43, 584–594. [Google Scholar]
- Painter, C.C.; Shkel, A.M. Active structural error suppression in MEMS vibratory rate integrating gyroscopes. IEEE Sens. J. 2003, 3, 595–606. [Google Scholar] [CrossRef]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; Rickard, A.; King, D.O. Electrostatic correction of structural imperfections present in a microring gyroscope. J. Micromech. Syst. 2005, 14, 221–234. [Google Scholar] [CrossRef]
- Ahn, C.H.; Ng, E.J.; Hong, V.A.; Yang, Y.; Lee, B.J.; Flader, I.; Kenny, T.W. Mode-matching of wineglass mode disk resonator gyroscope in (100) single crystal silicon. J. Micromech. Syst. 2014, 24, 343–350. [Google Scholar] [CrossRef]
- Asadian, M.H.; Wang, Y.; Askari, S.; Shkel, A. Controlled capacitive gaps for electrostatic actuation and tuning of 3D fused quartz micro wineglass resonator gyroscope. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 27–30 March 2017; pp. 1–4. [Google Scholar]
- Hu, Z.; Gallacher, B.J. Precision mode tuning towards a low angle drift MEMS rate integrating gyroscope. Mechatronics 2018, 56, 306–317. [Google Scholar] [CrossRef]
- Darvishian, A.; Boyd, C.; Singh, S.; Cho, J.-Y.; Woo, J.-K.; He, G.; Najafi, K. Effect of Electrode Design on Frequency Tuning in Shell Resonators. In Proceedings of the 2019 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019; pp. 1–4. [Google Scholar]
- Zotov, S.A.; Simon, B.R.; Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Quality Factor Maximization Through Dynamic Balancing of Tuning Fork Resonator. IEEE Sens. J. 2014, 14, 2706–2714. [Google Scholar] [CrossRef]
- Trusov, A.A.; Zotov, S.A.; Shkel, A.M. Electrostatic regulation of quality factor in non-ideal tuning fork MEMS. In Proceedings of the 2011 IEEE Sensors, Limerick, Ireland, 28–31 October 2011. [Google Scholar]
- Cheng, P.; Zhang, Y.; Gu, W.; Hao, Z.J.S.; Physical, A.A. Effect of polarization voltage on the measured quality factor of a multiple-beam tuning-fork gyroscope. Sens. Actuators A Phys. 2012, 187, 118–126. [Google Scholar] [CrossRef]
- Zhuravlev, V.F.; Lynch, D.D. Electric model of a hemispherical resonator gyro. Mech. Solids 1995, 30, 10–21. [Google Scholar]
- Lynch, D. Coriolis vibratory gyros. In Proceedings of the Symposium Gyro Technology, Stuttgart, Germany, 15–16 September 1998. [Google Scholar]
- Lynch, D.D. Vibratory gyro analysis by the method of averaging. In Proceedings of the 2nd St. Petersburg Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, 24–25 May 1995; pp. 26–34. [Google Scholar]
- Liu, N.; Su, Z.; Liu, H. Research on the control loop for Solid Vibratory Gyroscope. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4963–4968. [Google Scholar]
- Wang, X.; Wu, W.; Luo, B.; Fang, Z.; Li, Y.; Jiang, Q.J.S. Force to rebalance control of HRG and suppression of its errors on the basis of FPGA. Sensors 2011, 11, 11761–11773. [Google Scholar] [CrossRef]
- Zhang, M.; Llaser, N.; Rodes, F. High-precision time-domain measurement of quality factor. IEEE Trans. Instrum. Meas. 2011, 61, 842–844. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, D.; Wang, Y.; Liu, J.; Wu, S.; Qu, T.; Yang, K.; Luo, H.J.S. Monolithic cylindrical fused silica resonators with high Q factors. Sensors 2016, 16, 1185. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Qu, T.; Cui, Y.; Pan, Y.; Yu, M.; Luo, H.; Jia, Y.; Tan, Z.; Liu, J.; Zhang, B. Cylindrical Fused Silica Resonators Driven by PZT Thin Film Electrodes with Q Factor Achieving 2.89 Million after Coating. Sci. Rep. 2019, 9, 9461. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Qu, T.; Zhang, B.; Pan, Y.; Xiao, P. Simulations and Experiments on the Vibrational Characteristics of Cylindrical Shell Resonator Actuated by Piezoelectric Electrodes with Different Thicknesses. Shock Vib. 2017, 2017, 2314858. [Google Scholar] [CrossRef]
- Nair, B.S.; Deepa, S. Applied Electromagnetic Theory: Analyses, Problems and Applications; PHI Learning Pvt. Ltd.: Delhi, India, 2008. [Google Scholar]
- Senkal, D. Micro-glassblowing Paradigm for Realization of Rate Integrating Gyroscopes. Ph.D. Thesis, University of California, Irvine, CA, USA, 2015. [Google Scholar]
- Rayleigh, J.W.S.B. The Theory of Sound; Macmillan: New York, NY, USA, 1896; Volume 2. [Google Scholar]
- Zhuravlev, V.F. Theoretical principles of a solid state wave gyroscope. Ross. Akad. Nauk Izv. Mekhanika Tverd. Tela 1993, 28, 6–19. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Value | Units |
|---|---|---|
| a | 1.3 × 10−2 | m |
| d | 1.6 × 10−5 | m |
| L | 5.7 | mm |
| l | 3.1 | mm |
| h | 1.2 | mm |
| m | 2.8 × 10−3 | kg |
| E | 200 | V |
| ζφ | 3/13 | rad |
| ζΘ | π/9 | rad |
| φk | π/2–3/26 | rad |
| R | 8 | GΩ |
| Component | Frequency (Hz) | Decay Time (s) | Q Factor |
|---|---|---|---|
| 1 | 7473.767 | 25.385 | 5.960 × 105 |
| 2 | 7474.133 | 24.286 | 5.703 × 105 |
| Δ | 0.366 | 1.099 | 2.578 × 104 |
| Component | Frequency (Hz) | Decay Time (s) | Q Factor |
|---|---|---|---|
| 1 | 7473.745 | 25.180 | 5.912 × 105 |
| 2 | 7474.085 | 23.970 | 5.628 × 105 |
| Δ | 0.340 | 1.210 | 2.838 × 104 |
| Component | VCMs | VCPs | Variation |
|---|---|---|---|
| f1 (Hz) | 7473.767 | 7473.745 | −0.022 |
| f2 ‒ f1 (Hz) | 0.366 | 0.340 | −0.026 |
| t1 (s) | 25.385 | 25.180 | −0.205 |
| t2 ‒ t1 (s) | 1.099 | 1.210 | 0.111 |
| Component | VCMs | VCPs | Variation 1 | Theoretical | Variation 2 |
|---|---|---|---|---|---|
| f (Hz) | 7473.950 | 7473.915 | −0.035 | 7473.927 | −0.023 |
| (Hz) | 0.366 | 0.340 | −0.026 | 0.339 | −0.027 |
| (s−1) | 0.0403 | 0.0407 | 0.0004 | 0.0406 | 0.0003 |
| (s−1) | 0.0018 | 0.0020 | 0.0002 | 0.0023 | 0.0005 |
| Voltage (V) | t (s) | |
|---|---|---|
| 100 | 0.359 | 24.630 |
| 150 | 0.346 | 24.610 |
| 200 | 0.340 | 24.560 |
| 250 | 0.321 | 24.370 |
| 300 | 0.309 | 24.240 |
| 350 | 0.279 | 24.120 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, P.; Qiu, Z.; Pan, Y.; Li, S.; Qu, T.; Tan, Z.; Liu, J.; Yang, K.; Zhao, W.; Luo, H.; et al. Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes. Sensors 2020, 20, 295. https://doi.org/10.3390/s20010295
Xiao P, Qiu Z, Pan Y, Li S, Qu T, Tan Z, Liu J, Yang K, Zhao W, Luo H, et al. Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes. Sensors. 2020; 20(1):295. https://doi.org/10.3390/s20010295
Chicago/Turabian StyleXiao, Pengbo, Zhinan Qiu, Yao Pan, Shaoliang Li, Tianliang Qu, Zhongqi Tan, Jianping Liu, Kaiyong Yang, Wanliang Zhao, Hui Luo, and et al. 2020. "Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes" Sensors 20, no. 1: 295. https://doi.org/10.3390/s20010295
APA StyleXiao, P., Qiu, Z., Pan, Y., Li, S., Qu, T., Tan, Z., Liu, J., Yang, K., Zhao, W., Luo, H., & Qin, S. (2020). Influence of Electrostatic Forces on the Vibrational Characteristics of Resonators for Coriolis Vibratory Gyroscopes. Sensors, 20(1), 295. https://doi.org/10.3390/s20010295