Analog Least Mean Square Loop for Self-Interference Cancellation: A Practical Perspective †



Abstract
1. Introduction
- A comprehensive review on the implementation of the state-of-the-art adaptive filters for the RF domain cancellation in IBFD radios is presented.
- A practical structure of the ALMS loop for its future applications is proposed. Although adaptive filters employing the least mean square algorithm in the analog domain had been implemented as in [26,27], they are for low frequency (lower than 1 MHz) applications only. Based on the proposed structure, a prototype of the ALMS loop including two taps in an IBFD system at the carrier frequency of 2.4 GHz is implemented.
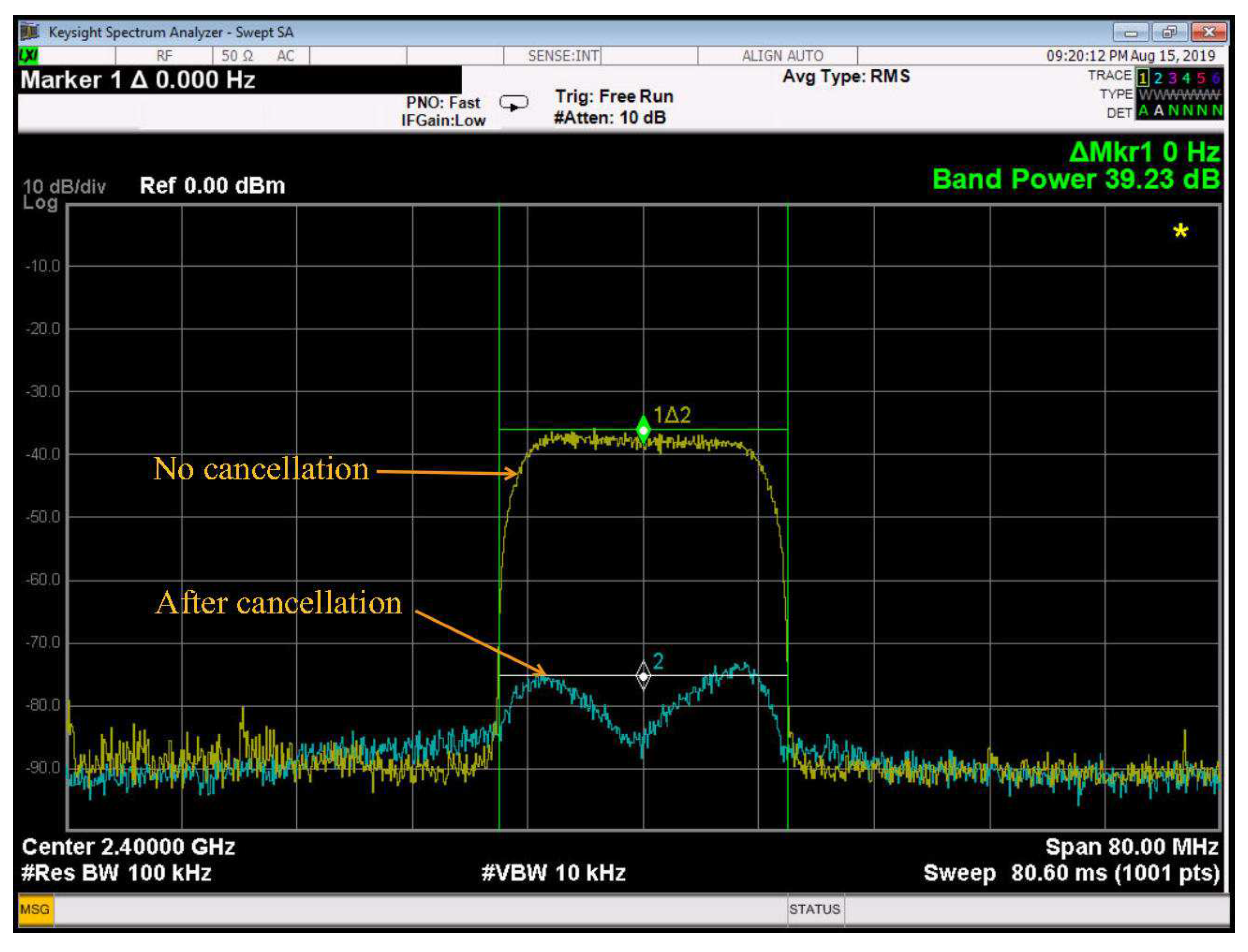
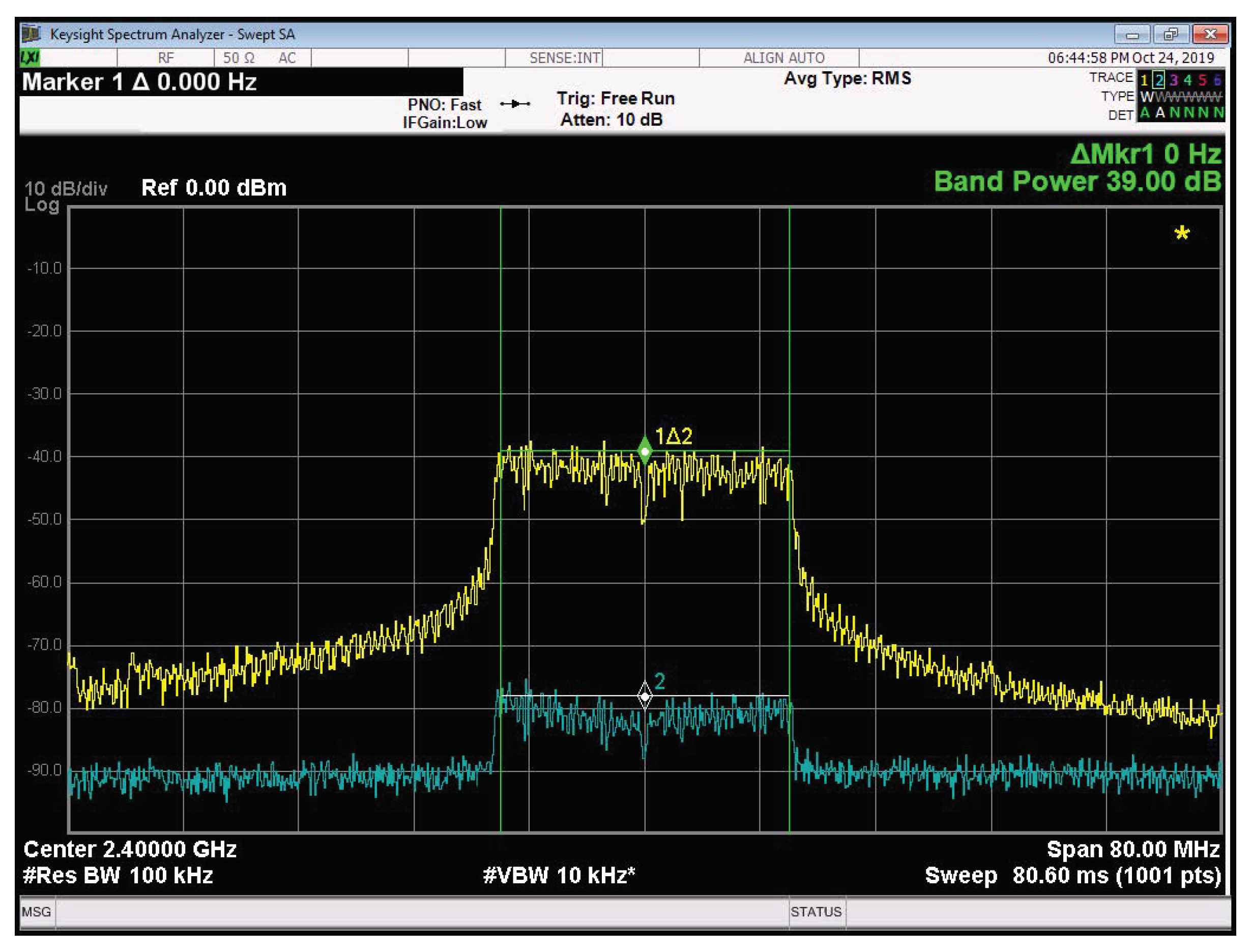
- Experimental results are provided to validate the theoretical analyses in our previous publications. Measured results show that 39 dB and 33 dB of SI mitigation can be achieved by the prototype in the system with 20 MHz and 50 MHz bandwidths, respectively. From the parameters of the components used in the prototype, the level of cancellation can be verified by the analytical formula of interference suppression ratio provided in [12]. Considering the degradation factor given in [24], the practical results agree with the theoretical ones. The level of cancellation is also measured with different roll-off factors of the pulse shaping filter to confirm the analyses shown in [22]. Finally, the prototype is evaluated with a 20 MHz-bandwidth orthogonal frequency-division multiplexing (OFDM) signal to confirm that the ALMS loop works well in both single carrier and multicarrier signaling systems as mentioned in [21,22,24].
2. Related Works
2.1. Analog Multi-Tap Adaptive Filters
2.2. ALMS Loop Architecture
3. Implementation of ALMS Loop
4. Measurement Results
4.1. Measurement Setup
4.2. Measurement Results
4.2.1. Measurement with Different Bandwidths
4.2.2. Measurement with Different Signal Properties
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ALMS | Analog Least Mean Square |
| CSI | Channel State Information |
| DSP | Digital Signal Processing |
| FPGA | Field Programmable Gate Array |
| IBFD | In-Band Full-Duplex |
| IC | Integrated Circuit |
| IMT | Impedance Mismatched Terminal |
| I/Q | In-phase/Quadrature |
| ISR | Interference Suppression Ratio |
| LNA | Low-Noise Amplifier |
| LO | Local Oscillator |
| LPF | Low-Pass Filter |
| MIMO | Multiple Input Multiple Output |
| OFDM | Orthogonal Frequency Division Multiplexing |
| RC | Resistor–Capacitor |
| RRC | Root-Raised Cosine |
| RF | Radio Frequency |
| SI | Self-Interference |
References
- Kolodziej, K.E.; Perry, B.T.; Herd, J.S. In-band full-duplex technology: Techniques and systems survey. IEEE Trans. Microw. Theory Tech. 2019, 67, 3025–3041. [Google Scholar] [CrossRef]
- Zhang, Z.; Long, K.; Vasilakos, A.V.; Hanzo, L. Full-duplex wireless communications: Challenges, solutions, and future research directions. Proc. IEEE 2016, 104, 1369–1409. [Google Scholar] [CrossRef]
- Riihonen, T.; Korpi, D.; Rantula, O.; Rantanen, H.; Saarelainen, T.; Valkama, M. In-band full-duplex radio transceivers: A paradigm shift in tactical communications and electronic warfare? IEEE Commun. Mag. 2017, 55, 30–36. [Google Scholar] [CrossRef]
- Choi, J.; Jain, M.; Srinivasan, K. Achieving single channel, full duplex wireless communication. In Proceedings of the 16th Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 1–12. [Google Scholar] [CrossRef]
- Duarte, M.; Sabharwal, A.; Aggarwal, V.; Jana, R.; Ramakrishnan, K.; Rice, C.; Shankaranarayanan, N.K. Design and characterization of a full-duplex multiantenna system for WIFI networks. IEEE Trans. Veh. Technol. 2014, 63, 1160–1177. [Google Scholar] [CrossRef]
- Ha, J.; Elmansouri, M.A.; Valale Prasannakumar, P.; Filipovic, D.S. Monostatic co-polarized full-duplex antenna with left- or right-hand circular polarization. IEEE Trans. Antennas Propag. 2017, 65, 5103–5111. [Google Scholar] [CrossRef]
- Deo, P.; Mirshekar-Syahkal, D.; Zheng, G.; Pal, A.; Mehta, A. Broadband antenna for passive self-interference suppression in full-duplex communications. In Proceedings of the 2018 IEEE Radio and Wireless Symposium (RWS), Anaheim, CA, USA, 15–18 January 2018; pp. 243–245. [Google Scholar]
- Li, J.; Tran, L.C.; Safaei, F. Performance evaluation of full-duplex energy harvesting relaying networks using PDC self-interference cancellation. In Proceedings of the 2018 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, Australia, 17–19 December 2018; pp. 1–6. [Google Scholar]
- Li, J.; Tran, L.C.; Safaei, F. Full-duplex OFDM relaying systems with energy harvesting in multipath fading channels. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Knox, M.E. Single antenna full duplex communications using a common carrier. In Proceedings of the 2012 IEEE Wireless and Microwave Technology Conference (WAMICON), Cocoa Beach, FL, USA, 15–17 April 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Bharadia, D.; McMilin, E.; Katti, S. Full duplex radios. In Proceedings of the ACM SIGCOMM 2013 Conference, Hong Kong, China, 12–16 August 2013; pp. 375–386. [Google Scholar] [CrossRef]
- Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J.; Vardaxoglou, J.C. Frequency domain characterization and performance bounds of ALMS loop for RF self-interference cancellation. IEEE Trans. Commun. 2019, 67, 682–692. [Google Scholar] [CrossRef]
- Huusari, T.; Choi, Y.S.; Liikkanen, P.; Korpi, D.; Talwar, S.; Valkama, M. Wideband self-adaptive RF cancellation circuit for full-duplex radio: Operating principle and measurements. In Proceedings of the 2015 IEEE 81st Vehicular Technolgy Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 11–14. [Google Scholar] [CrossRef]
- Kolodziej, K.E.; McMichael, J.G.; Perry, B.T. Multitap RF canceller for in-band full-duplex wireless communications. IEEE Trans. Wirel. Commun. 2016, 15, 4321–4334. [Google Scholar] [CrossRef]
- Kiayani, A.; Waheed, M.Z.; Anttila, L.; Abdelaziz, M.; Korpi, D.; Syrjälä, V.; Kosunen, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Adaptive nonlinear RF cancellation for improved isolation in simultaneous transmit-receive systems. IEEE Trans. Microw. Theory Tech. 2018, 66, 2299–2312. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, M.; Jiao, B. Design and implementation of adaptive multi-tap analog interference canceller. IEEE Trans. Wirel. Commun. 2019, 18, 1698–1706. [Google Scholar] [CrossRef]
- Bharadia, D.; Katti, S. Full Duplex MIMO Radios. In Proceedings of the 11th USENIX Conference Networked Systems Design Implementation, Seattle, WA, USA, 2–4 April 2014; pp. 359–372. [Google Scholar]
- Khaledian, S.; Farzami, F.; Smida, B.; Erricolo, D. Inherent Self-Interference Cancellation for In-Band Full-Duplex Single-Antenna Systems. IEEE Trans. Microw. Theory Tech. 2018, 66, 2842–2850. [Google Scholar] [CrossRef]
- Huang, X.; Guo, Y.J. Radio frequency self-interference cancellation with analog least mean-square loop. IEEE Trans. Microw. Theory Tech. 2017, 65, 3336–3350. [Google Scholar] [CrossRef]
- Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J. Beam-based analog self-interference cancellation with auxiliary transmit chains in full-duplex MIMO systems. In Proceedings of the 2019 20th Internarional Workshop on Signal Processing Advances in Wireless Communication (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Le, A.T.; Tran, L.C.; Huang, X. On performance of analog least mean square loop for self-interference cancellation in in-band full-duplex OFDM systems. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Le, A.T.; Tran, L.C.; Huang, X. Cyclostationary analysis of analog least mean square loop for self-interference cancellation in in-band full-duplex systems. IEEE Commun. Lett. 2017, 21, 2738–2741. [Google Scholar] [CrossRef]
- Le, A.T.; Nan, Y.; Tran, L.C.; Huang, X.; Guo, Y.J.; Vardaxoglou, Y. Analog least mean square loop for self-interference cancellation in generalized continuous wave SAR. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J. Analog least mean square loop with I/Q imbalance for self-interference cancellation in full-duplex radios. IEEE Trans. Veh. Technol. 2019, 68, 9848–9860. [Google Scholar] [CrossRef]
- Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J. Analog Least Mean Square Loop for Self-Interference Cancellation: Implementation and Measurements. In Proceedings of the 2019 29th International Telecommunication Networks and Applications Conference (ITNAC), Aukland, New Zealand, 26–29 November 2019; pp. 1–6. [Google Scholar]
- Kub, F.J.; Justh, E.W. Analog CMOS implementation of high frequency least-mean square error learning circuit. IEEE J. Solid-State Circuits 1995, 30, 1391–1398. [Google Scholar] [CrossRef]
- Perez-Carmona, J.E.; Perez-Meana, H.M.; Sanchez-Garcia, J.C. Analog adaptive filter LMS algorithm using CMOS 0.5 μm technology. WSEAS Trans. Circuits Syst. 2008, 7, 839–848. [Google Scholar]
- Bryant, J. Multipliers vs. Modulators. Available online: https://www.analog.com/media/en/analog-dialogue/volume-47/number-2/articles/multipliers-vs-modulators.pdf (accessed on 19 December 2019).
- Tran, L.C.; Wysocki, T.A.; Seberry, J.; Mertins, A.; Adams, S.S. Novel constructions of improved square complex orthogonal designs for eight transmit antennas. IEEE Trans. Inf. Theory 2009, 55, 4439–4448. [Google Scholar] [CrossRef]
- Tran, L.C.; Mertins, A.; Wysocki, T.A. Unitary differential space-time-frequency codes for MB-OFDM UWB wireless communications. IEEE Trans. Wirel. Commun. 2013, 12, 862–876. [Google Scholar] [CrossRef]
- Tran, L.C.; Mertins, A.; Wysocki, T.A. Cooperative communication in space-time-frequency coded MB-OFDM UWB. In Proceedings of the 2008 IEEE 68th Vehicular Technology Conference, Calgary, BC, Canada, 24 October 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Sudjai, M.; Tran, L.C.; Safaei, F. Performance analysis of STFC MB-OFDM UWB in WBAN channels. In Proceedings of the 2012 IEEE 23rd International Symposium on Personal, Indoor Mobile Radio Communications - (PIMRC), Sydney, Australia, 9–12 September 2012; pp. 1710–1715. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # of Taps | Delay Line | Tap Weight Control | ISR (dB) | Bandwidth (MHz) | |
|---|---|---|---|---|---|
| [11] | 8 | Microstrip trace | FPGA | 45 | 80 |
| [13] | 2 | Anaren IC | Down converter + Integrator | 33 | 20 |
| [14] | 4 | Coaxial cable | FPGA | 21.6 | 20 |
| [16] | 8 | Microstrip trace | FPGA | 38 | 20 |
| Signalling | Findings | Methods | |
|---|---|---|---|
| [19] | Single carrier | ISR vs. loop gain & | Cyclostationary & stationary |
| [21] | Multi carrier | ISR vs. windowing function | Cyclostationary & stationary |
| [22] | Single & multi carrier | ISRLB vs. | Cyclostationary |
| [23] | Chirp signal | Tap delay design for deterministic signal | Stationary |
| [12] | Single carrier | ISRLB in analog and digital domains | Stationary |
| [24] | Single & multi carrier | Degradation factor vs. I/Q imbalance | Stationary |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, A.T.; Tran, L.C.; Huang, X.; Guo, Y.J. Analog Least Mean Square Loop for Self-Interference Cancellation: A Practical Perspective. Sensors 2020, 20, 270. https://doi.org/10.3390/s20010270
Le AT, Tran LC, Huang X, Guo YJ. Analog Least Mean Square Loop for Self-Interference Cancellation: A Practical Perspective. Sensors. 2020; 20(1):270. https://doi.org/10.3390/s20010270
Chicago/Turabian StyleLe, Anh Tuyen, Le Chung Tran, Xiaojing Huang, and Yingjie Jay Guo. 2020. "Analog Least Mean Square Loop for Self-Interference Cancellation: A Practical Perspective" Sensors 20, no. 1: 270. https://doi.org/10.3390/s20010270
APA StyleLe, A. T., Tran, L. C., Huang, X., & Guo, Y. J. (2020). Analog Least Mean Square Loop for Self-Interference Cancellation: A Practical Perspective. Sensors, 20(1), 270. https://doi.org/10.3390/s20010270