Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures


Abstract
:1. Introduction
2. Theoretical Investigation of Wave Propagation in Concrete Beam
2.1. Theoretical Model
2.2. Dispersion Curves
3. Experimental Investigation of Wave Propagation in Beams with Debonding
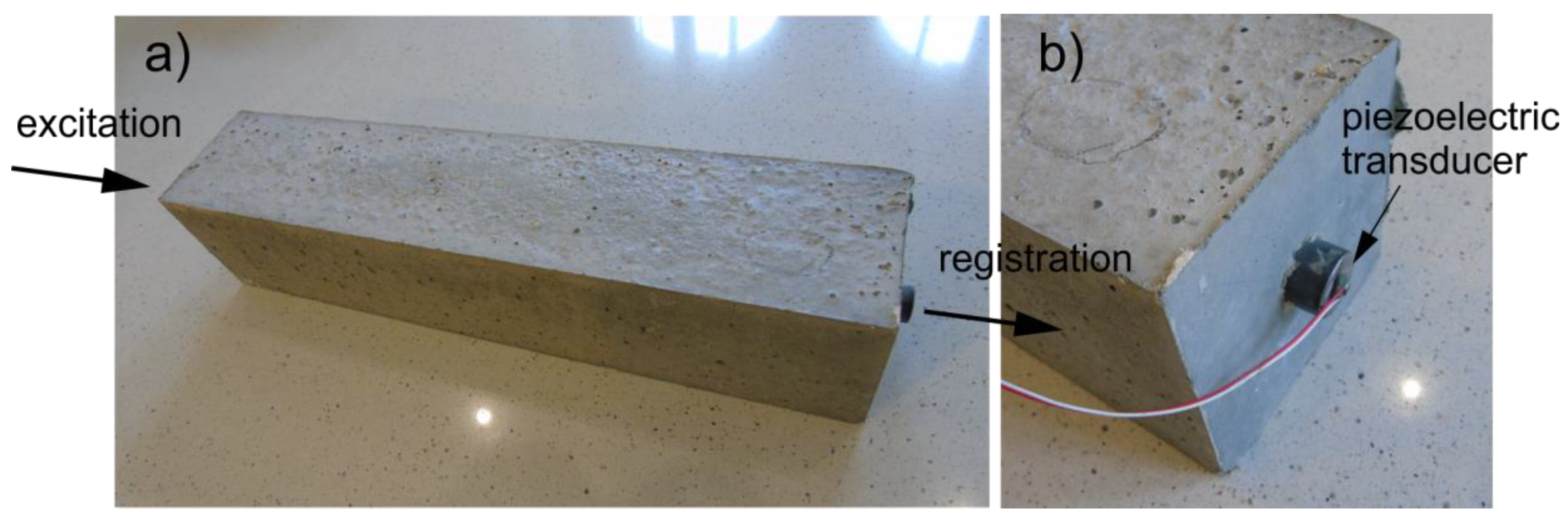
3.1. Experimental Model
3.2. Experimental Set Up
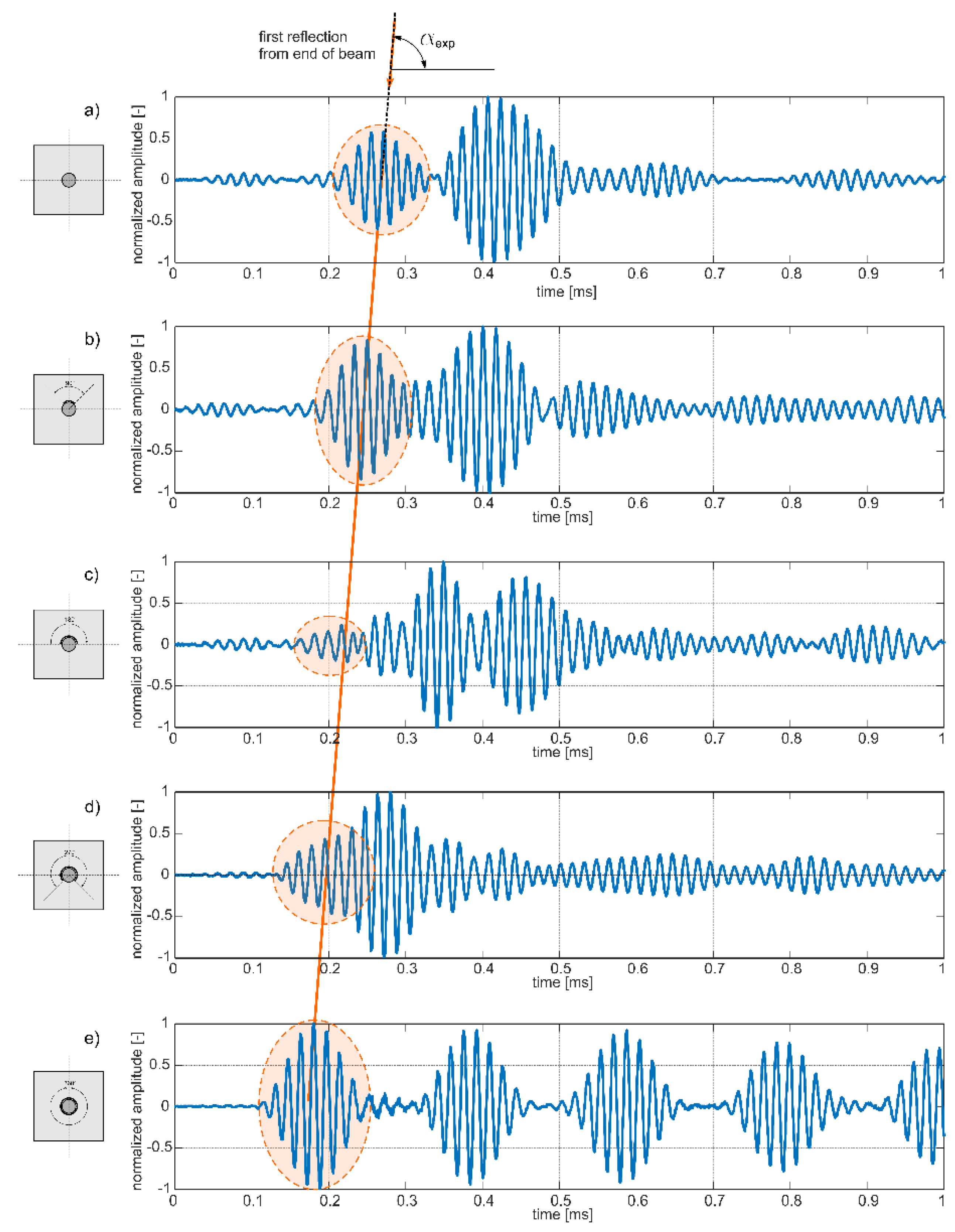
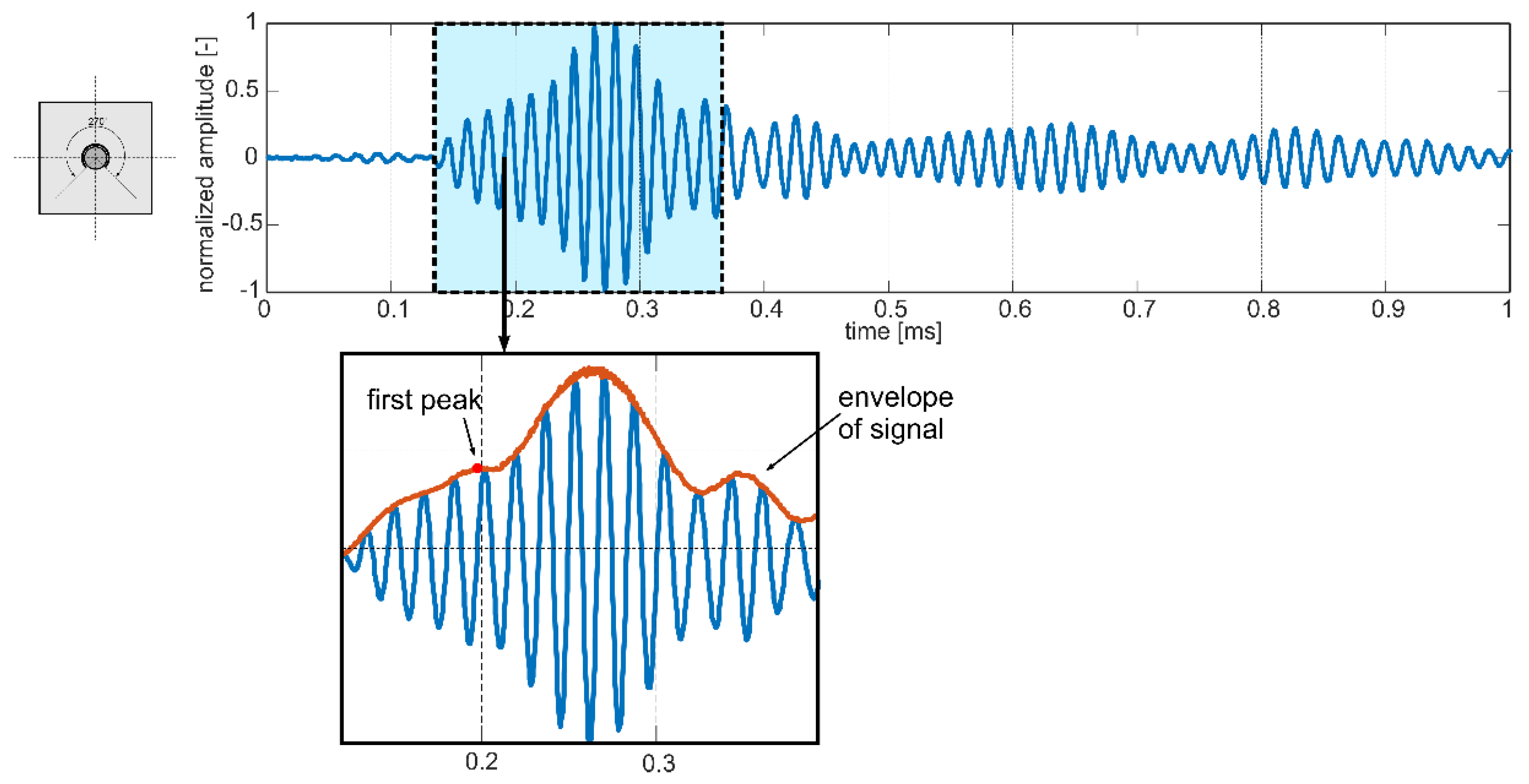
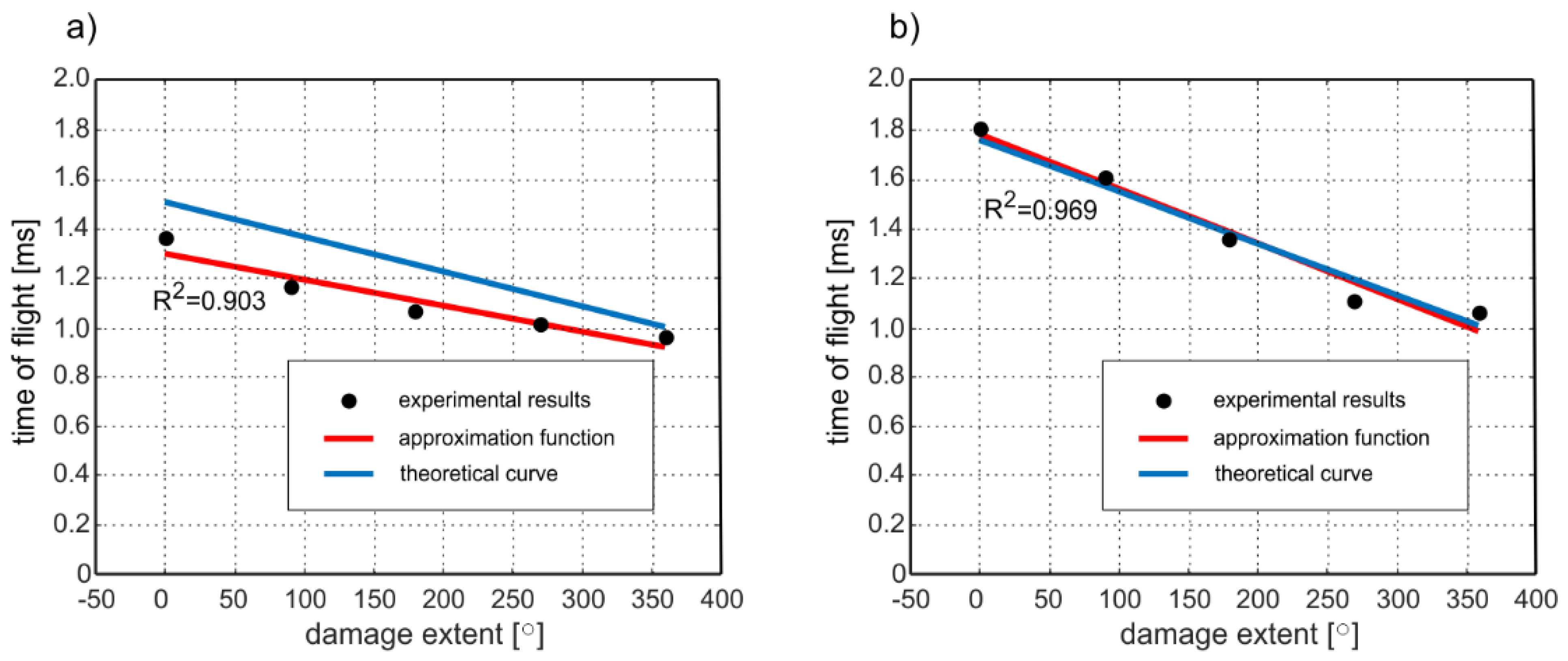
3.3. Results of Experimental Investigation
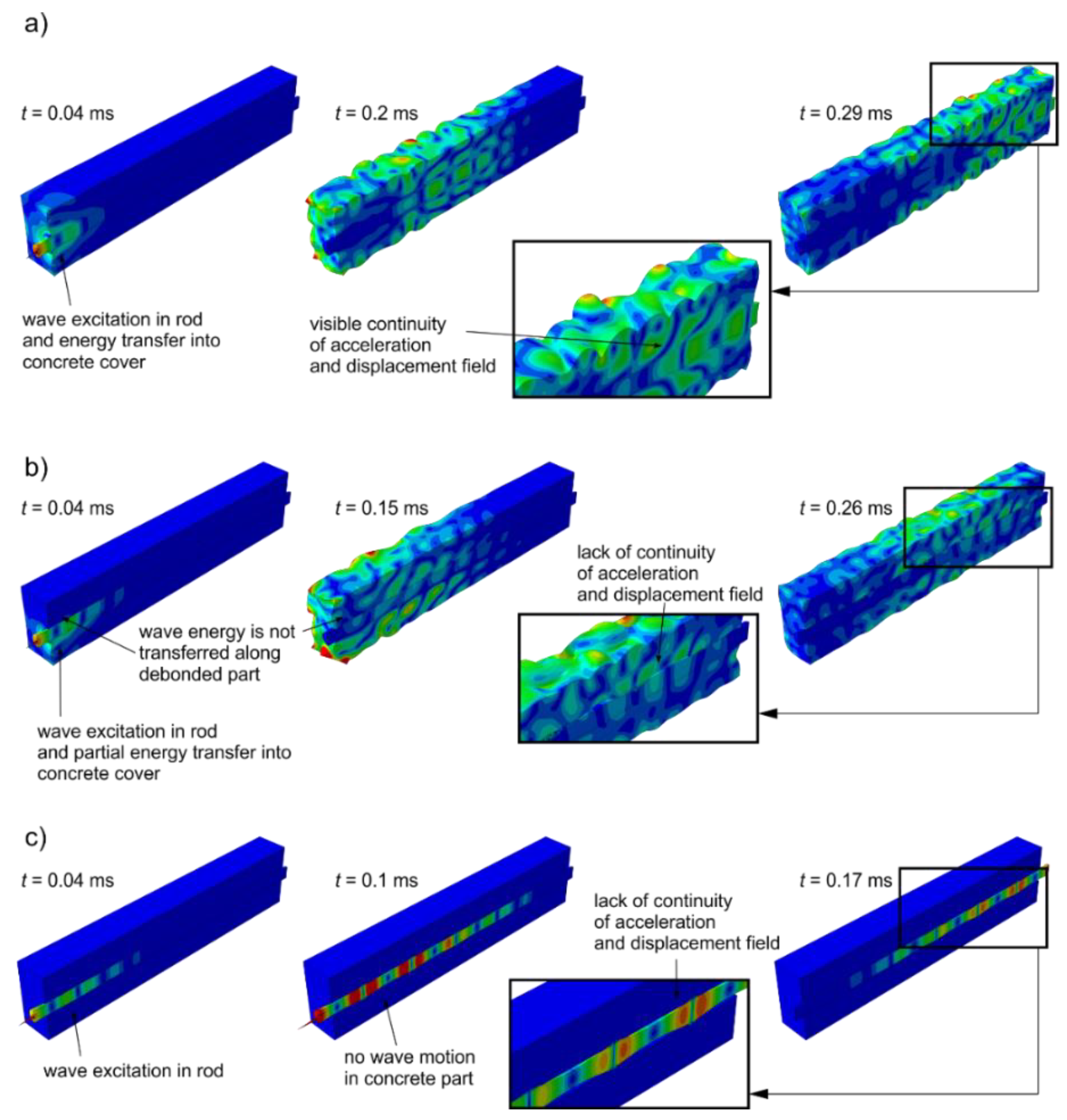
4. Numerical Analysis
5. Discussion of Aspects of Practical Application
5.1. The Algorithm of Debonding Detection
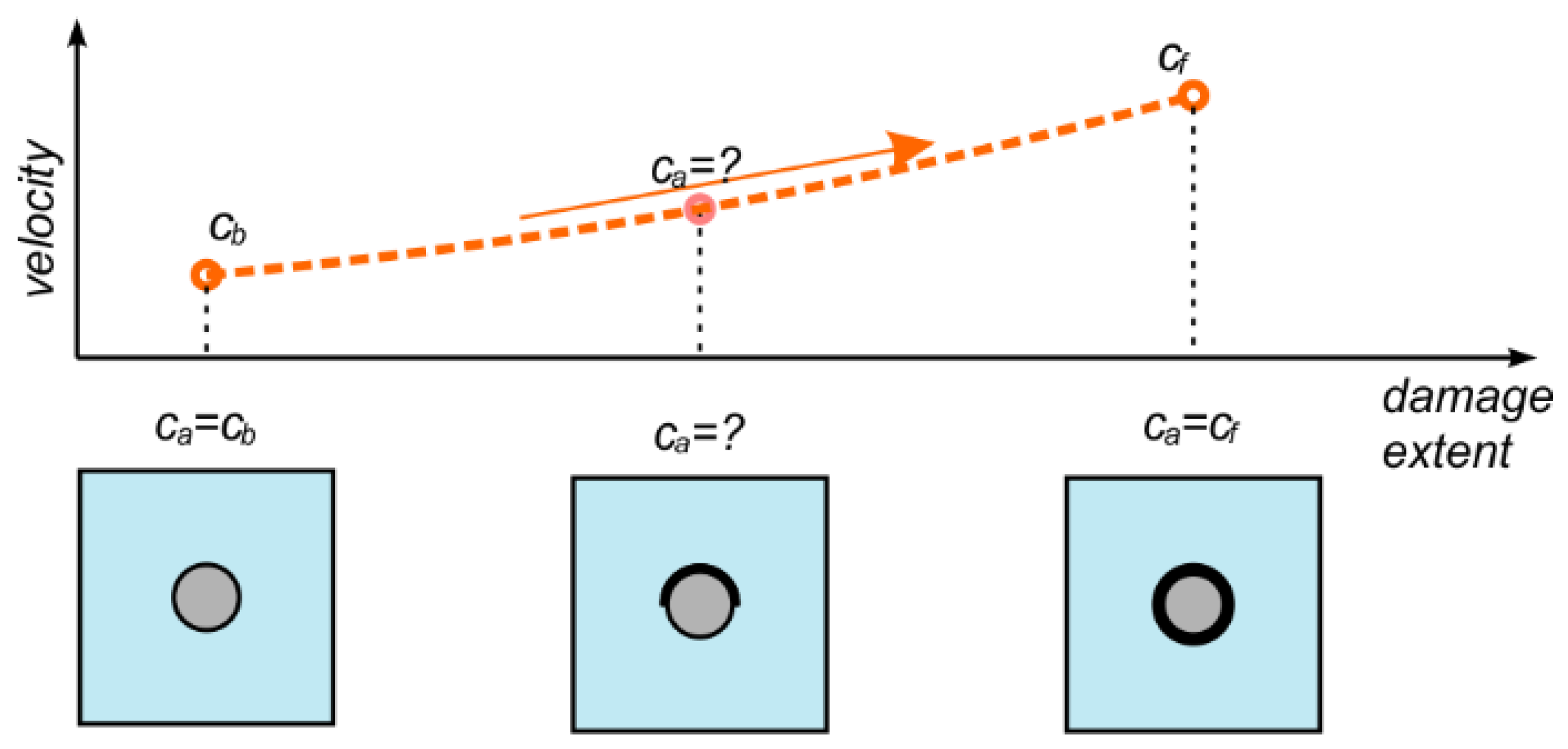
- On the basis of the cross-section geometry and material parameters of the concrete and steel, trace the dispersion curves.
- Determine the theoretical velocities of the fastest modes cf and cb for frequency, which is used in experimental tests.
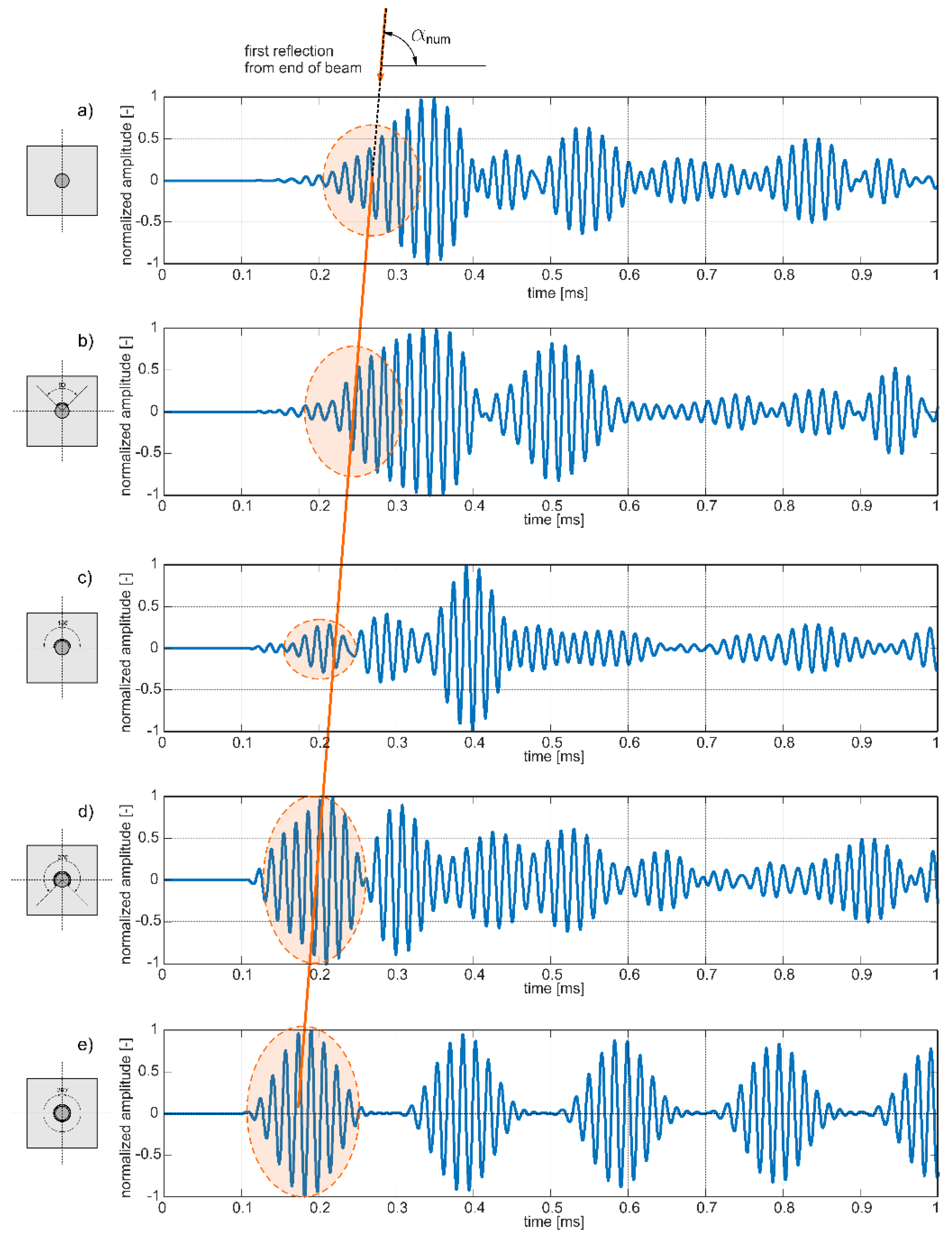
- Determine experimentally the average velocity ca of the first reflection.
- Use the Equation (16) to calculate the debonding extent.
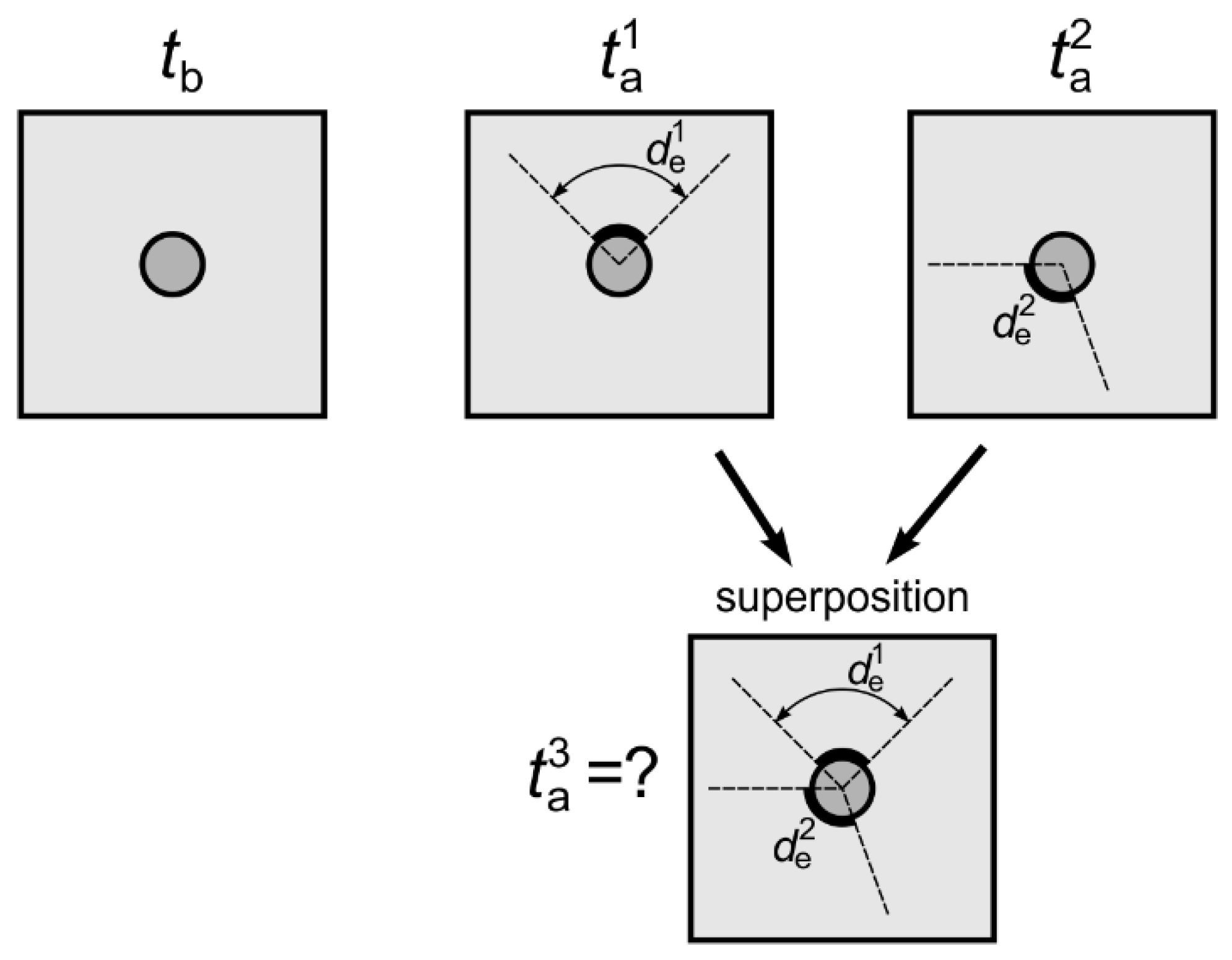
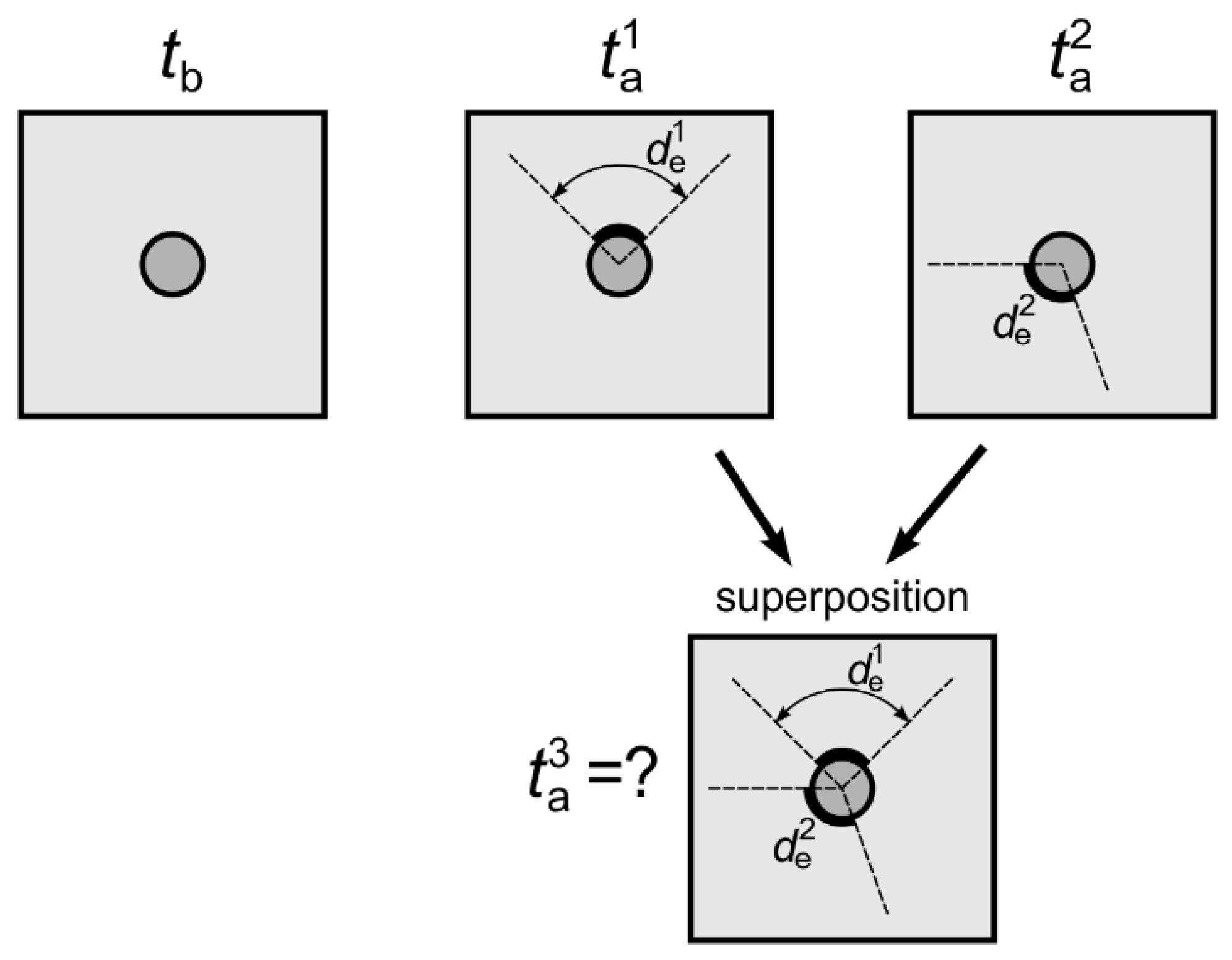
5.2. Detection of Multiple Debondings
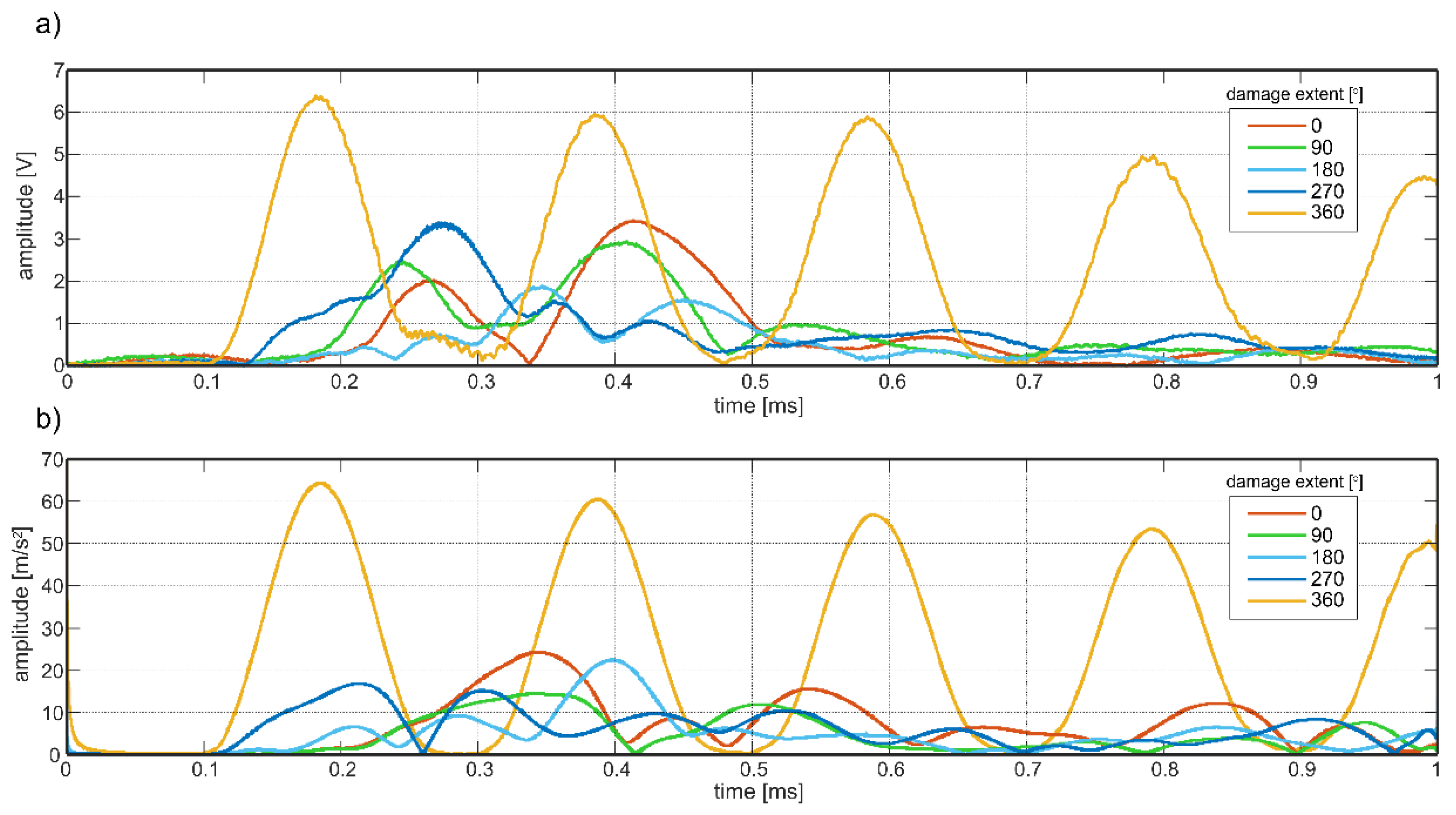
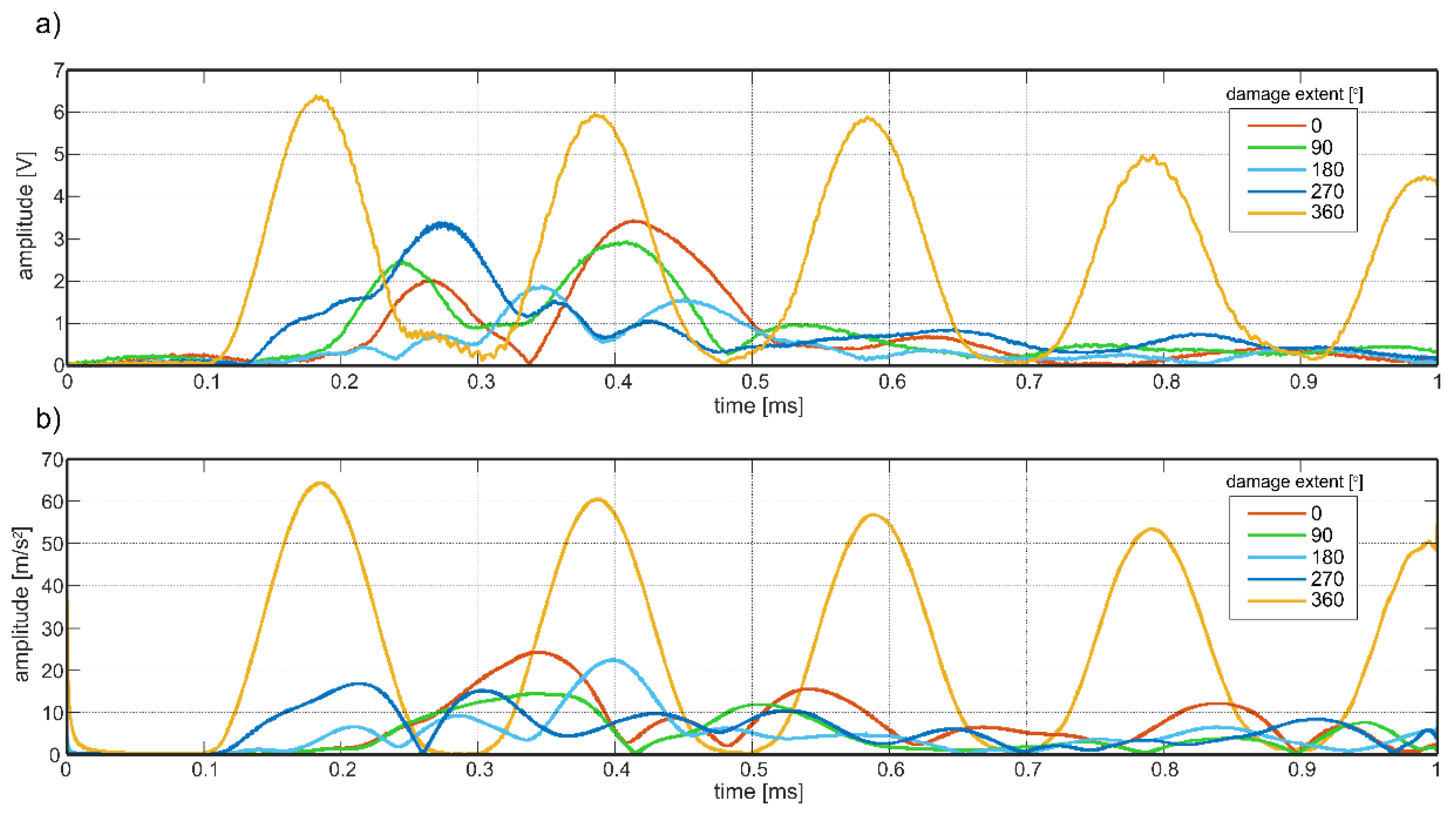
5.3. Influence of Debonding on Wave Amplitude
6. Conclusions and Future Plans
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, A.; Kim Soo, H. Active Vibration Control of a Piezo-bonded Laminated Composite in the Presence of Sensor Partial Debonding and Structural Delaminations. Sensors 2019, 19, 540. [Google Scholar] [CrossRef] [PubMed]
- Di, B.; Wang, J.; Li, H.; Zheng, J.; Zheng, Y.; Song, G. Investigation of Bonding Behavior of FRP and Steel Bars in Self-Compacting Concrete Structures Using Acoustic Emission Method. Sensors 2019, 19, 159. [Google Scholar] [CrossRef]
- Kędra, R.; Rucka, M. Diagnostics of bolted lap joint using guided wave propagation. Diagnostyka 2014, 15, 35–40. [Google Scholar]
- Żak, A.; Radzieński, M.; Krawczuk, M.; Ostachowicz, W. Damage detection strategies based on propagation of guided elastic waves. Smart Mater. Struct. 2012, 21, 035024. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors, 1st ed.; Academic Press: Cambridge, MA, USA, 2008. [Google Scholar]
- Li, H.; Zhou, Z. Detection and Characterization of Debonding Defects in Aeronautical Honeycomb Sandwich Composites Using Noncontact Air-Coupled Ultrasonic Testing Technique. Appl. Sci. 2019, 9, 283. [Google Scholar] [CrossRef]
- Sikdar, S.; Ostachowicz, W. Ultrasonic Lamb wave-based debonding monitoring of advanced honeycomb sandwich composite structures. Strain 2019, 55, e12302. [Google Scholar] [CrossRef]
- Sohn, H.; Dutta, D.; Yang, J.Y.; HJPark DeSimo, M.; Olson, S.; Swenson, E. Delamination detection in composites through guided wave field image processing. Key Eng. Mater. 2011, 71, 1250–1256. [Google Scholar] [CrossRef]
- Li, B.; Ye, L.; Li, Z.; Ma, Z.; Kalhori, H. Quantitative identification of delamination at different interfaces using guided wave signals in composite laminates. J. Rein. Plast. Comp. 2015, 34, 1506–1525. [Google Scholar] [CrossRef]
- Shoja, S.; Berbyuk, V.; Bostrom, A. Delamination detection in composite laminates using low frequency guided waves: Numerical simulations. Compos. Struct. 2018, 203, 826–834. [Google Scholar] [CrossRef]
- Ramadas, C.; Balasubramaniam, K.; Joshi, M.; Krishnamurthy, C.V. Numerical and experimental studies on propagation of A0 mode in a composite plate containing semi-infinite delamination: Observation of turning modes. Compos. Struct. 2011, 93, 1929–1938. [Google Scholar] [CrossRef]
- Munian, R.K.; Mahapatra Roy, D.; Gopalakrishnan, S. Lamb interaction with composite delamination. Compos. Struct. 2018, 206, 484–498. [Google Scholar] [CrossRef]
- Feng, B.; Ribeiro, A.L.; Ramos, H.G. Interaction of Lamb waves with the edges of a delamination in CFRP composites and a reference-free localization method for delamination. Measurement 2018, 122, 424–431. [Google Scholar] [CrossRef]
- Feng, B.; Ribeiro, A.L.; Ramos, H.G. A new method to detect delamination in composites using chirp-excited Lamb wave and wavelet analysis. NDT E Int. 2018, 100, 64–73. [Google Scholar] [CrossRef]
- Yelve, N.P.; Mitra, M.; Mujumdar, P.M. Detection of delamination in composite laminates using Lamb wave based nonlinear method. Compos. Struct. 2017, 159, 257–266. [Google Scholar] [CrossRef]
- Eremin, A.; Golub, M.; Glushkov, E.; Glushkova, N. Identification of delamination based on the Lamb wave scattering resonance frequencies. NDT E Int. 2019, 103, 145–153. [Google Scholar] [CrossRef]
- Na, W.-B.; Kundu, T.; Ehsani, M.R. Lamb waves for detecting delamination between steel bars and concrete. Comput.-Aided Civ. Infrastruct. Eng. 2003, 18, 58–63. [Google Scholar] [CrossRef]
- Wu, F.; Chang, F.-K. Debond detection using embedded piezoelectric elements in reinforced concrete structures—Part I: Experiment. Struct. Health Monit. 2006, 5, 5–15. [Google Scholar] [CrossRef]
- Wu, F.; Chang, F.-K. Debond detection using embedded piezoelectric elements in reinforced concrete structures—Part II: Analysis and algorithm. Struct. Health Monit. 2006, 5, 17–28. [Google Scholar] [CrossRef]
- Kim, S.D.; In, C.W.; Cronin, K.E.; Sohn, H.; Harries, K. Reference-free technique for debonding detection in CFRP-strengthened RC structures. J. Struct. Eng. 2007, 133, 1080–1091. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.; Hao, H.; Ou, J. Guided wave propagation and spectral element method for debonding damage assessment in RC structures. J. Sound Vib. 2009, 324, 751–772. [Google Scholar] [CrossRef]
- Song, G.; Gu, H.; Mo, Y.L.; Hsu, T.T.C.; Dhone, H. Concrete structural health monitoring using embedded piezoceramic transducers. Smart Mater. Struct. 2007, 16, 959–968. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, T.; Song, G.; Gu, H.C. Active interface debonding detection of a concrete-filled steel tube with piezoelectric technologies using wavelet packet analysis. Mech. Syst. Signal. Process. 2012, 36, 7–17. [Google Scholar] [CrossRef]
- Li, J.; Lu, Y.; Guan, R.; Qu, W. Guided waves for debonding identification on CFRP-reinforced concrete beams. Constr. Build. Mater. 2017, 131, 388–399. [Google Scholar] [CrossRef]
- Zima, B.; Rucka, M. Detection of debonding in steel bars embedded in concrete using guided wave propagation. Diagnostyka 2016, 17, 27–34. [Google Scholar]
- Zima, B.; Rucka, M. Guided ultrasonic waves for detection of debonding in bars partially embedded in grout. Constr. Build. Mater. 2018, 168, 124–142. [Google Scholar] [CrossRef]
- Zima, B.; Rucka, M. Guided wave propagation for assessment of adhesive bonding between steel and concrete. Procedia Eng. 2017, 199, 2300–2305. [Google Scholar] [CrossRef]
- Zima, B.; Kędra, R. Reference-free determination of debonding length in reinforced concrete beams using guided wave propagation. Constr. Build. Mater. 2019, 207, 291–303. [Google Scholar] [CrossRef]
- Chen, H.; Xu, B.; Zhou, T.; Mo, Y.-L. Debonding detection for rectangular CFST using surface wave measurement: test and multi-physical fields numerical simulation. Mech. Syst. Sig. Pr. 2019, 117, 238–254. [Google Scholar] [CrossRef]
- Ng, C.-T.; Mohseni, H.; Lam, H.-F. Debonding detection in CFRP-retrofitted reinforced concrete strutures using nonlinear Rayleigh wave. Mech. Syst. Sig. Pr. 2019, 125, 245–256. [Google Scholar] [CrossRef]
- Pochhammer, L. Beitrag zur Theorie der Biegung des Kreiscylinders. Journal fur die reine und angewandte. Mathematik 1876, 81, 33–61. [Google Scholar]
- Chree, C. The equations of an isotropic elastic solid in polar and cylindrical coordinates, their solutions and applications. Trans. Cambridge Philos. Soc. 1889, 14, 250–369. [Google Scholar]
- Pao, Y.H.; Mindlin, R.D. Dispersion of flexural waves in an elastic, circular cylinder. J. Appl. Mech. 1960, 27, 513–520. [Google Scholar] [CrossRef]
- Seco, F.; Jimenez, A.R. Modelling the Generation and Propagation of Ultrasonic Signals in Cylindrical Waveguides. In Ultrasonic Waves; Auteliano Antunes dos Santos Júnior, IntechOpen: London, UK, 2012; pp. 1–28. [Google Scholar]
- Treyssède, F. Numerical investigation of elastic modes of propagation in helical waveguides. J. Acoust. Soc. Am. 2007, 121, 3398–3408. [Google Scholar] [CrossRef]
- Søe-Knudsen, A.; Sorokin, S. On accuracy of the wave finite element predictions of wavenumbers and power flow: A benchmark problem. J. Sound Vib. 2011, 330, 2694–2700. [Google Scholar]
- Liu, Y.J.; Han, Q.; Li, C.L.; Huang, H.W. Numerical investigation of dispersion relations for helical waveguides using the scaled boundary finite element method. J. Sound Vib. 2014, 333, 1991–2002. [Google Scholar] [CrossRef]
- Bocchini, P.; Marzani, A.; Viola, E. Graphical User Interface for Guided Acoustic Waves. J. Comput. Civil. Eng. 2011, 25, 202–210. [Google Scholar] [CrossRef]
- Armenákas, A.E. Propagation of harmonic waves in composite circular-cylindrical rods. J. Acoust. Soc. Am. 1970, 47, 822–837. [Google Scholar] [CrossRef]
- Potamianos, A.; Maragos, P. A comparison of the energy operator and the Hilbert transform approach to the signal and speech deconvolution. Signal. Process. 1994, 37, 95–120. [Google Scholar] [CrossRef]
- Xu, B.; Yu, L.; Giurgiutiu, V. Advanced methods for time-of-flight estimation with application to Lamb wave structural health monitoring. In Proceedings of the 7th International Workshop on Structural Health Monitoring, Palo, Alto, CA, USA, 9–11 September 2009. [Google Scholar]
- Zima, B.; Kędra, R. Numerical investigation of the core eccentricity effect on wave propagation in embedded waveguide. Diagnostyka 2019, 20, 11–18. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
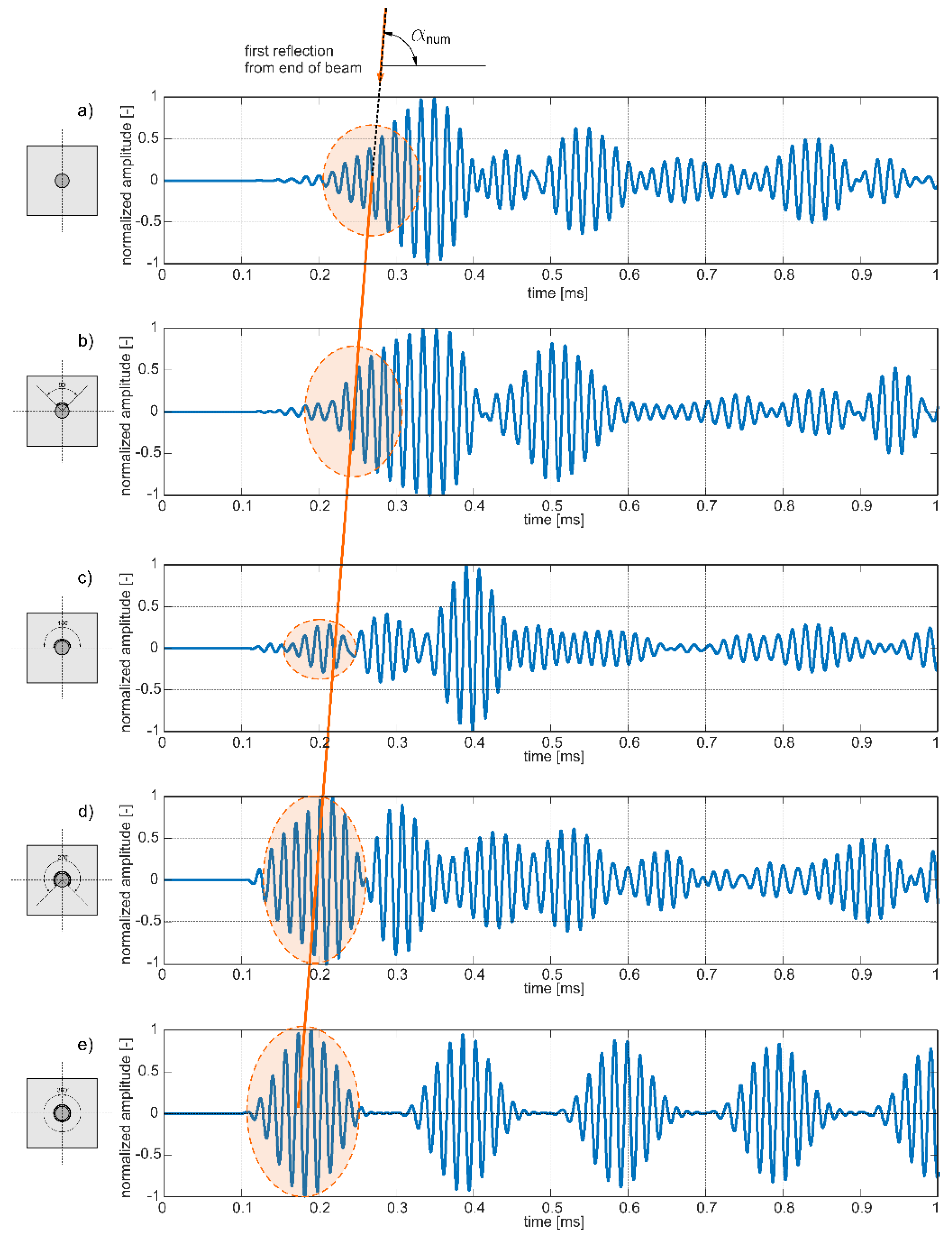
| Debonding Extent [°] | Registration at the End of the Beam [ms] | Wave Velocity [m/s] | Absolute Error [%] | ||
|---|---|---|---|---|---|
| Time Od Flight of the First Peak | ToF (ta) Reduced by a Half of Input Packet | Calculated on the Basis of ToF (ta) | Calculated on the Basis of Equation (7) | ||
| 0 | 0.260 | 0.177 | 2694.3 | 2760.3 | 2.4 |
| 90 | 0.240 | 0.157 | 3038.3 | 3098.3 | 1.9 |
| 180 | 0.216 | 0.133 | 3587.9 | 3530.5 | 1.6 |
| 270 | 0.195 | 0.112 | 4262.7 | 4102.9 | 3.9 |
| 360 | 0.182 | 0.099 | 4824.3 | 4896.8 | 1.5 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zima, B. Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures. Sensors 2019, 19, 2199. https://doi.org/10.3390/s19092199
Zima B. Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures. Sensors. 2019; 19(9):2199. https://doi.org/10.3390/s19092199
Chicago/Turabian StyleZima, Beata. 2019. "Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures" Sensors 19, no. 9: 2199. https://doi.org/10.3390/s19092199
APA StyleZima, B. (2019). Guided Wave Propagation in Detection of Partial Circumferential Debonding in Concrete Structures. Sensors, 19(9), 2199. https://doi.org/10.3390/s19092199