A Novel Traveling-Wave-Based Method Improved by Unsupervised Learning for Fault Location of Power Cables via Sheath Current Monitoring


Abstract
:1. Introduction
2. Theoretical Basis of Traveling-Wave Method
3. Typical Cable Structures and the Monitoring of the Fault Signals
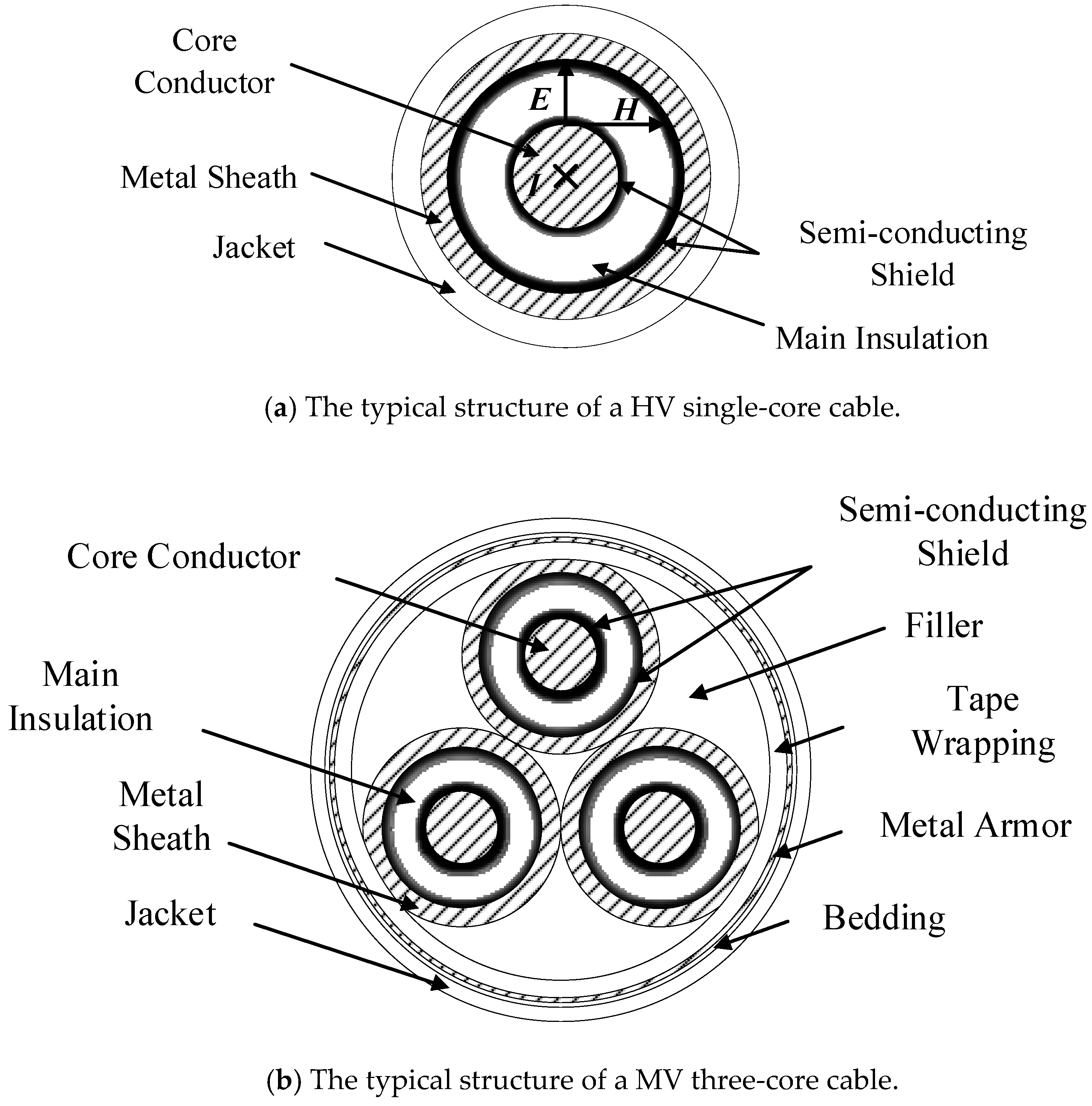
3.1. Typical Cable Structures
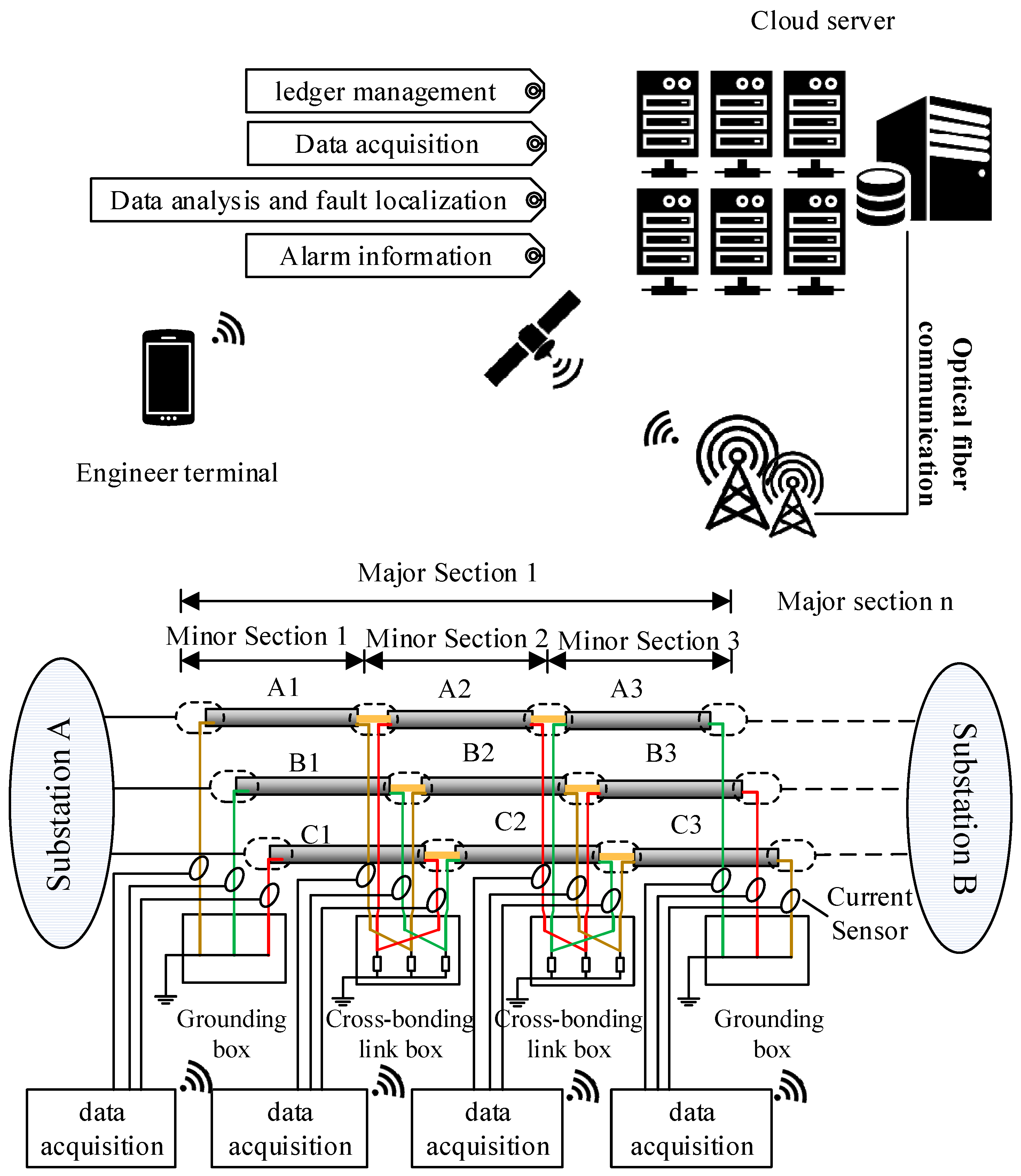
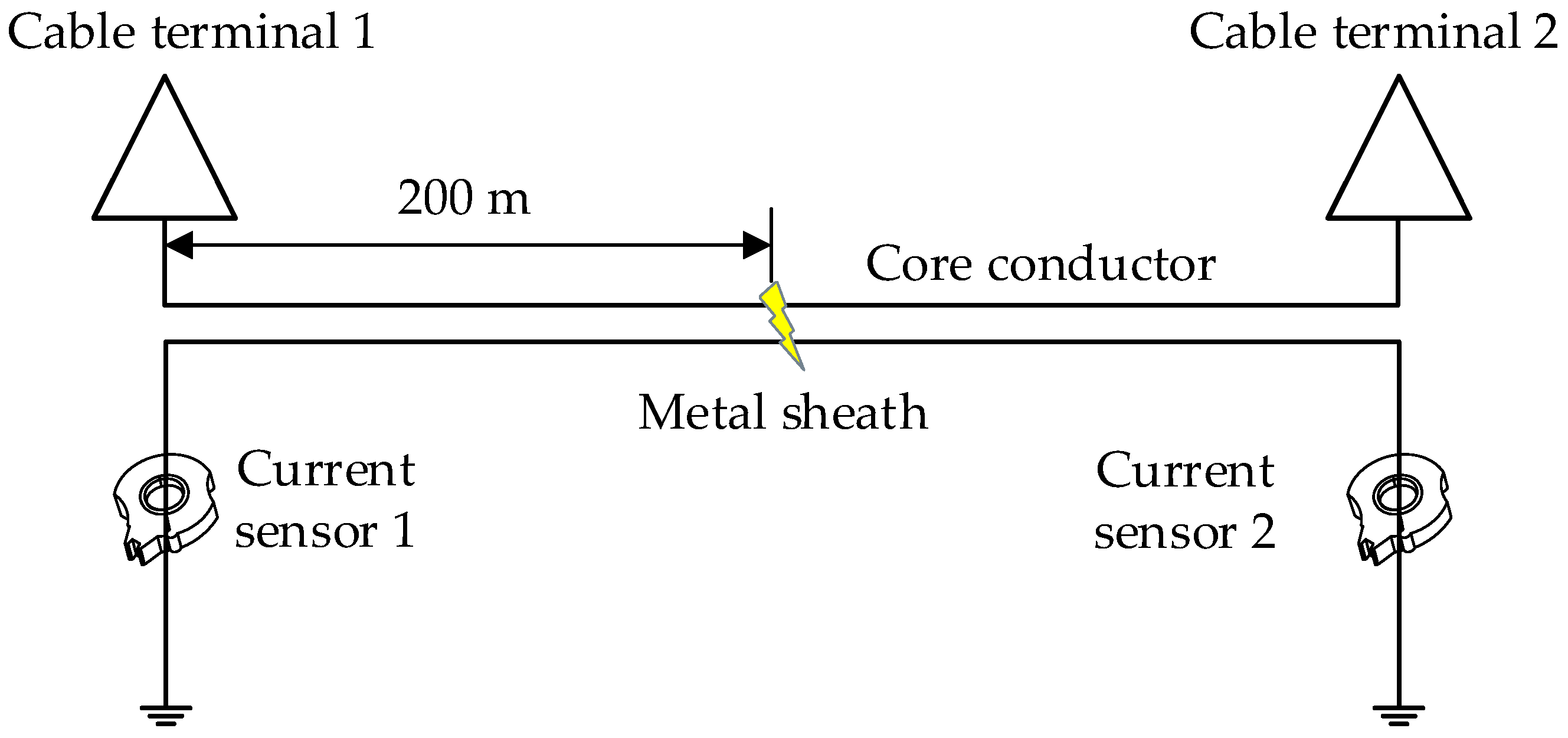
3.2. The Monitoring of the Fault Signals
4. Analysis of the Sheath Currents and the Fault Location using Unsupervised Learning
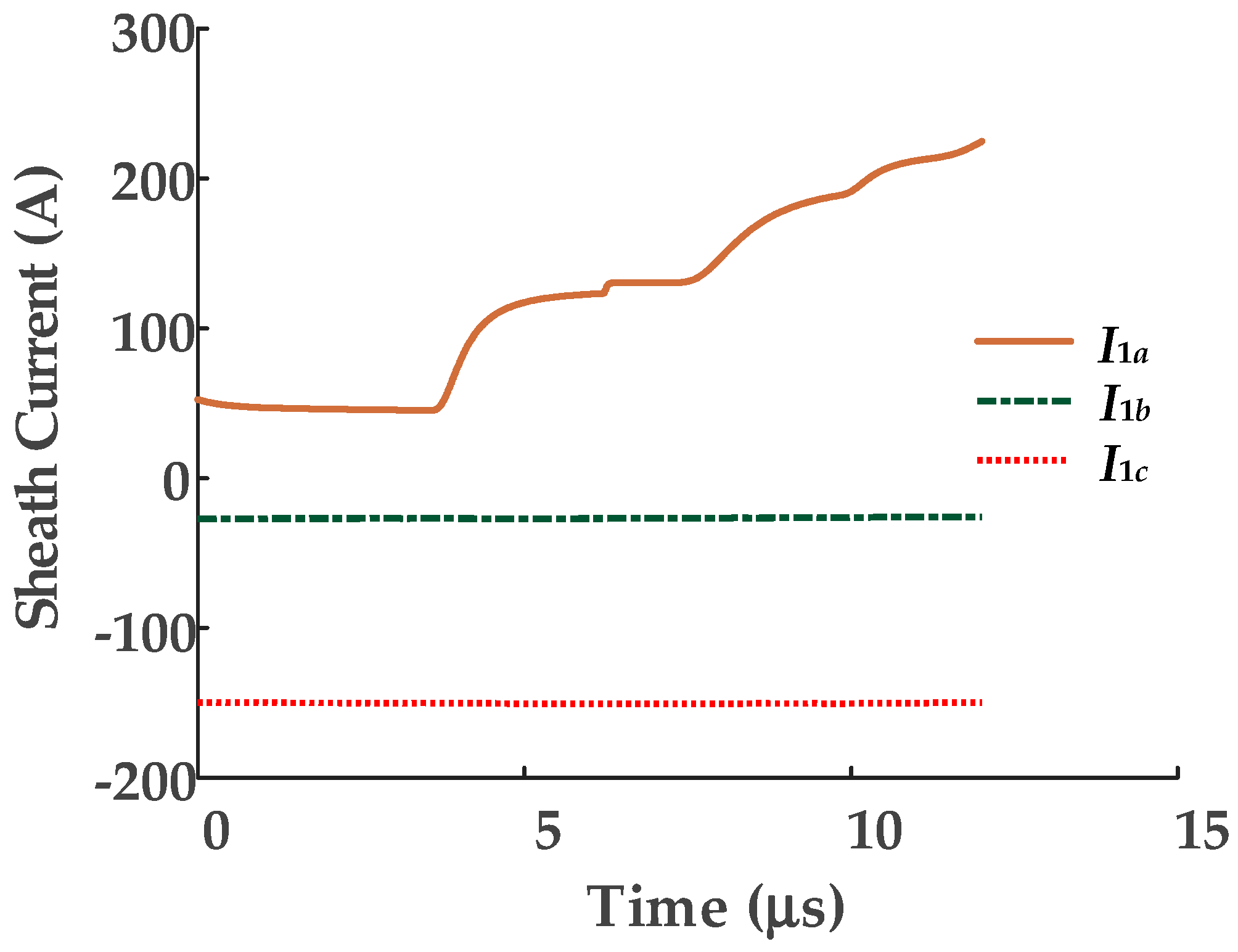
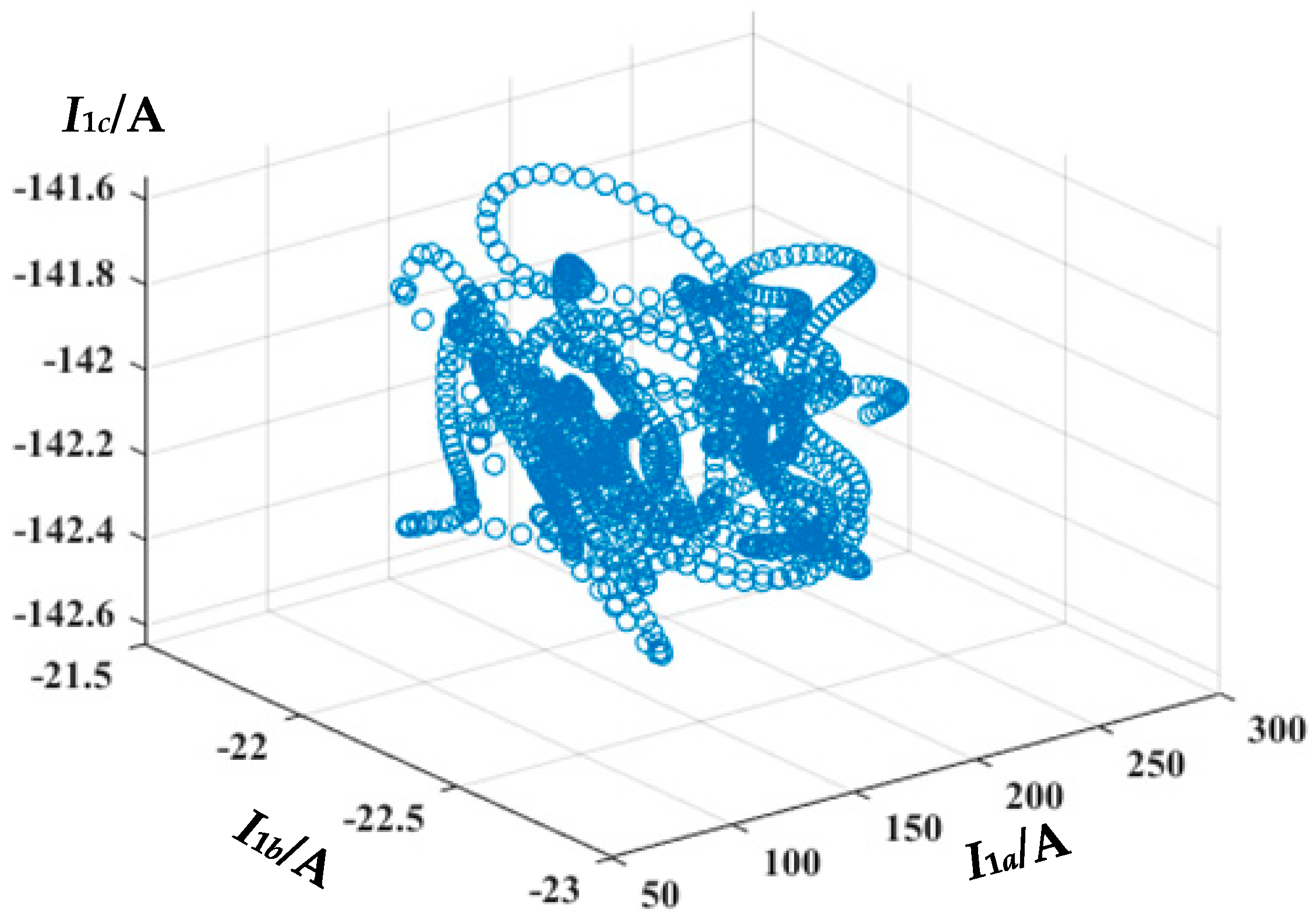
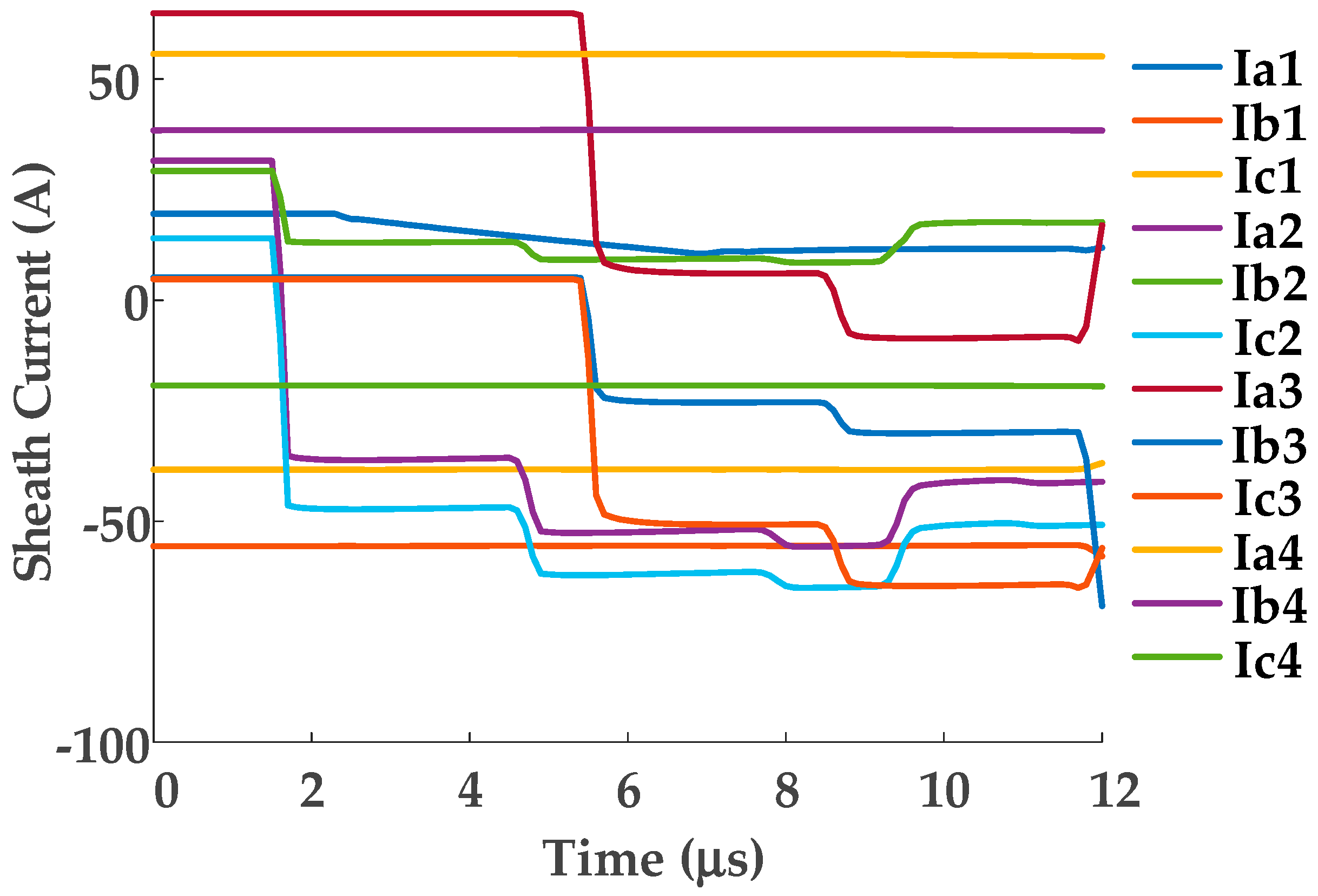
4.1. The Construction of the Sheath Current Matrix
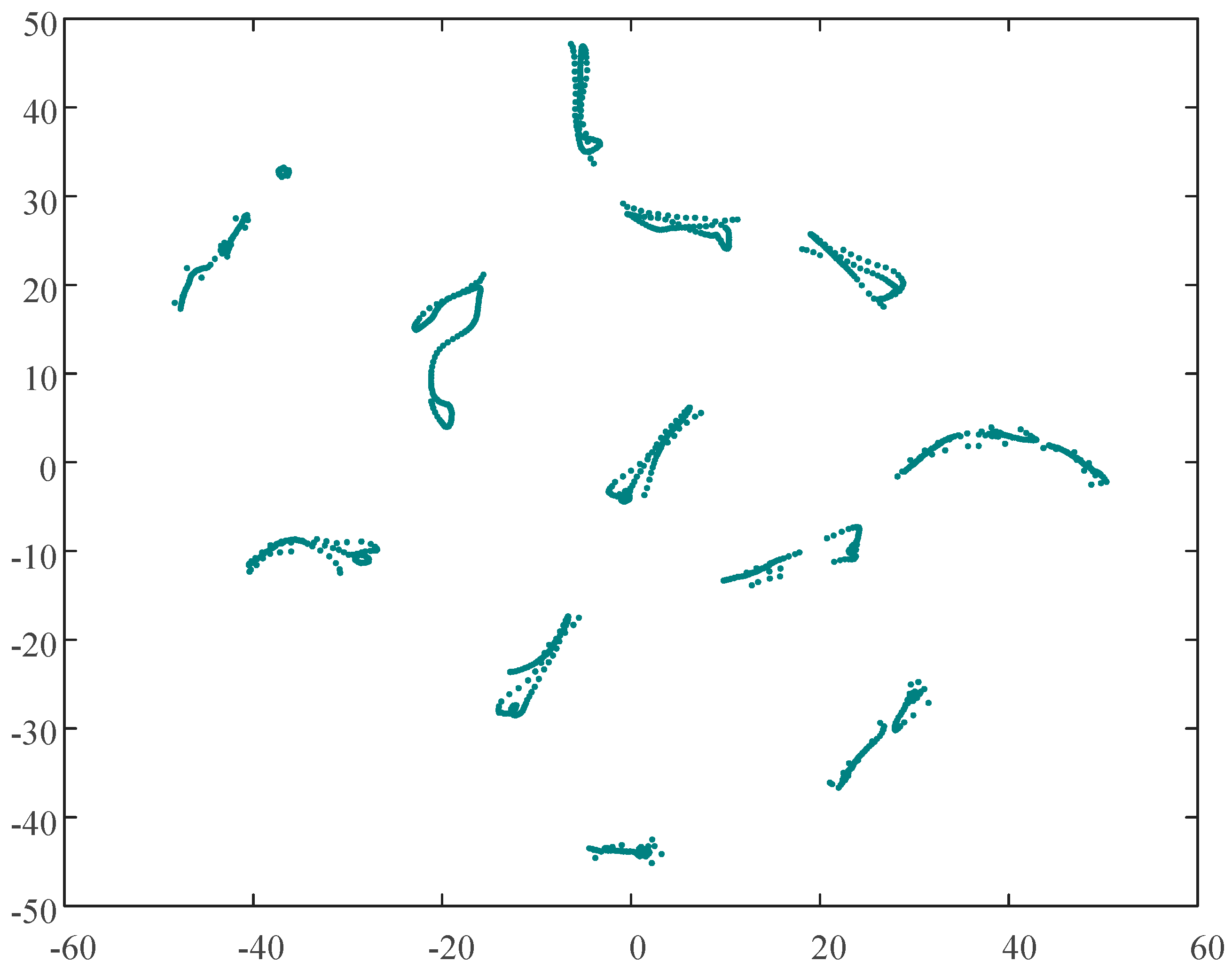
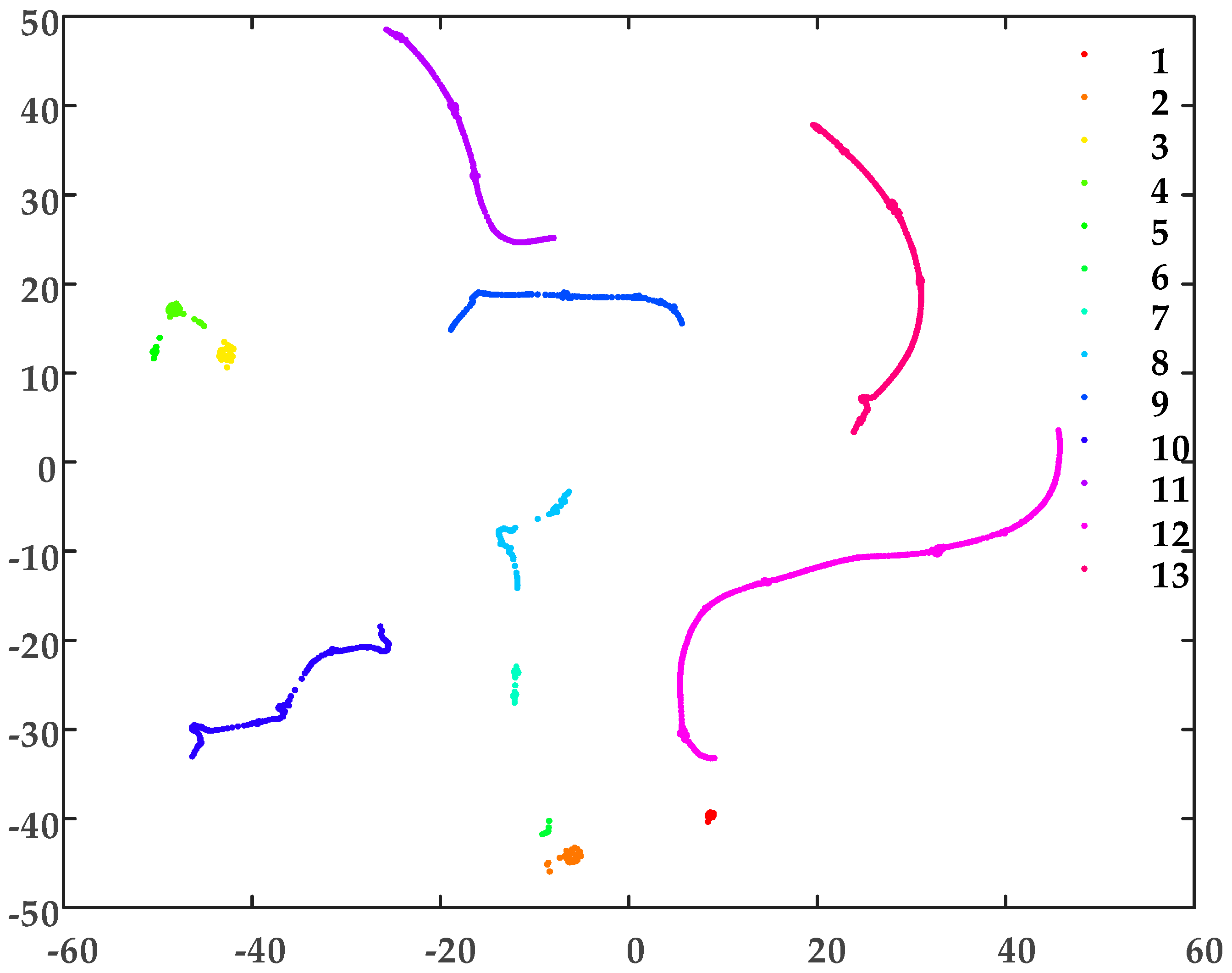
4.2. Dimensionality Reduction by t-SNE
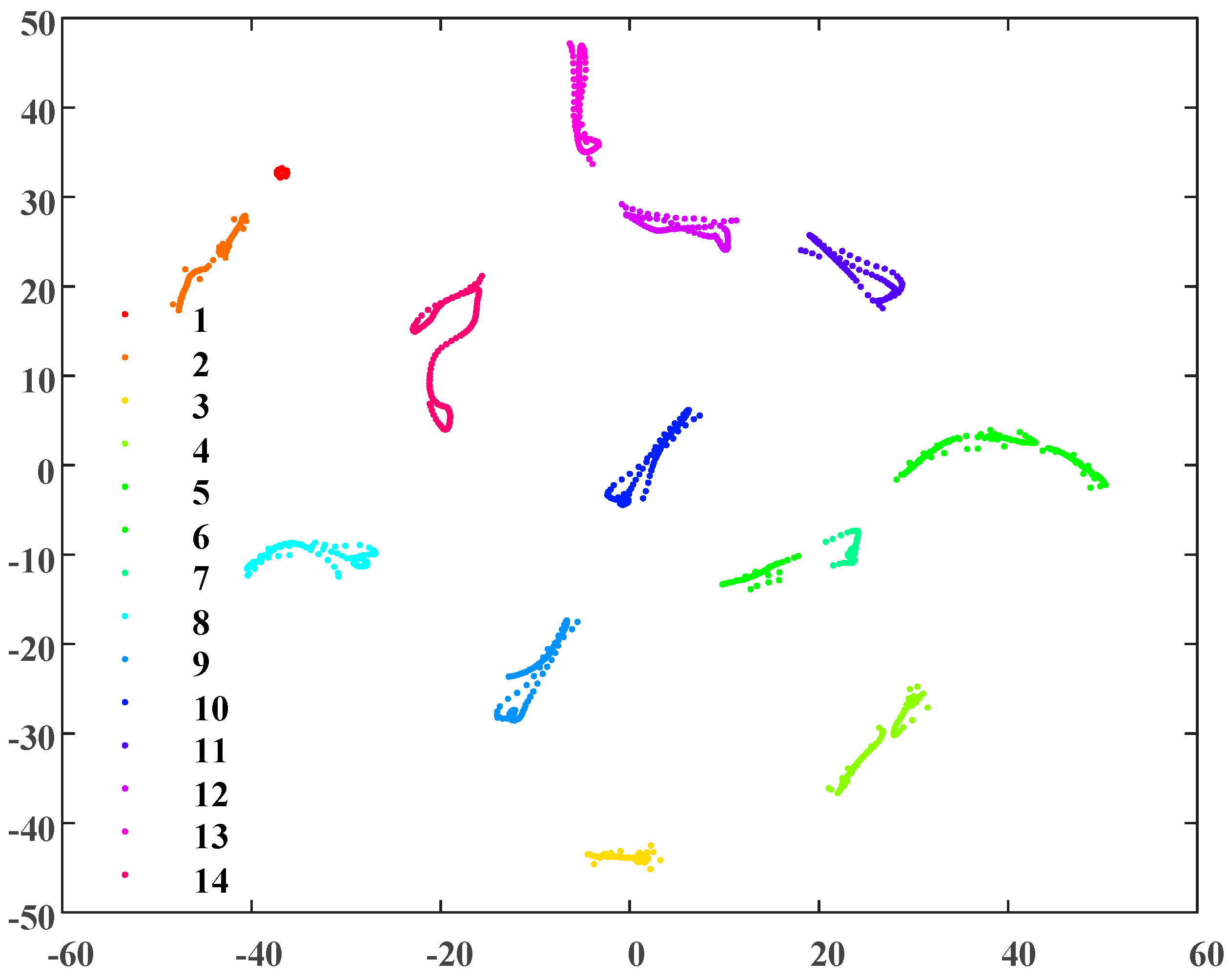
4.3. DBSCAN Clustering
- Find a data point p that has not been visited in the dataset D, mark p as visited, then search the neighbors of p within a radius of Eps, set the neighbor data as Ne. If the data number of Ne is less than MinPts, mark all the data of Ne as noise. Otherwise, mark all the data of Ne as a new cluster C (C = {C1, C2, …, Ck}).
- Expand clusters Ne and C: Find a data point q that has not been visited in the dataset Ne, mark q as visited, then search the neighbors of q within a radius of Eps, set the neighbor data as NE. If the data number of Ne is more than MinPts, combine Ne and NE, denoted as Ne. If q is not member of any clusters, add q to C.
- Repeat step (2) until Ne is empty.
- Repeat steps (1)–(3) until every point in D has been visited and been marked as a member of a cluster or as noise.
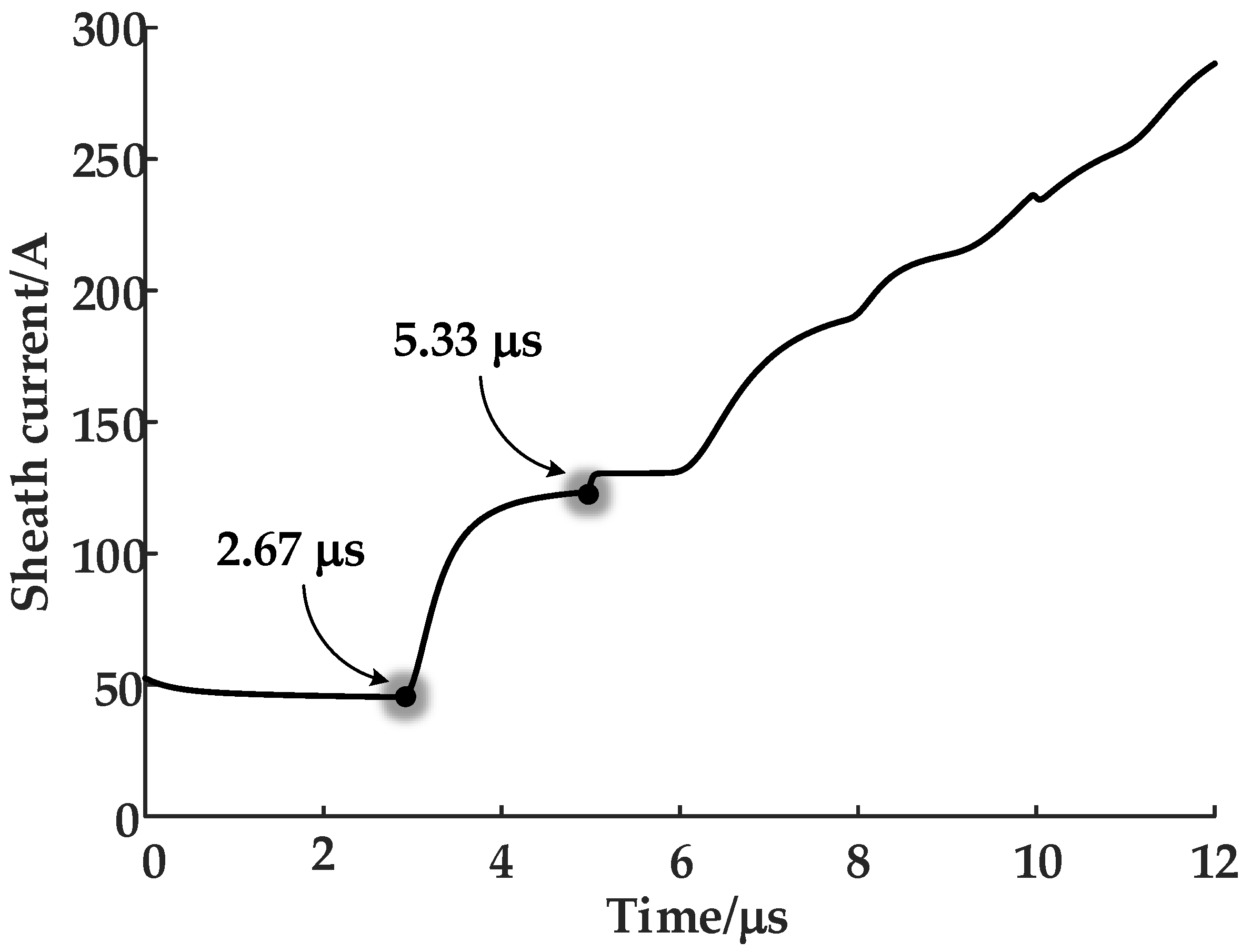
4.4. The Identification of the Arrival Time
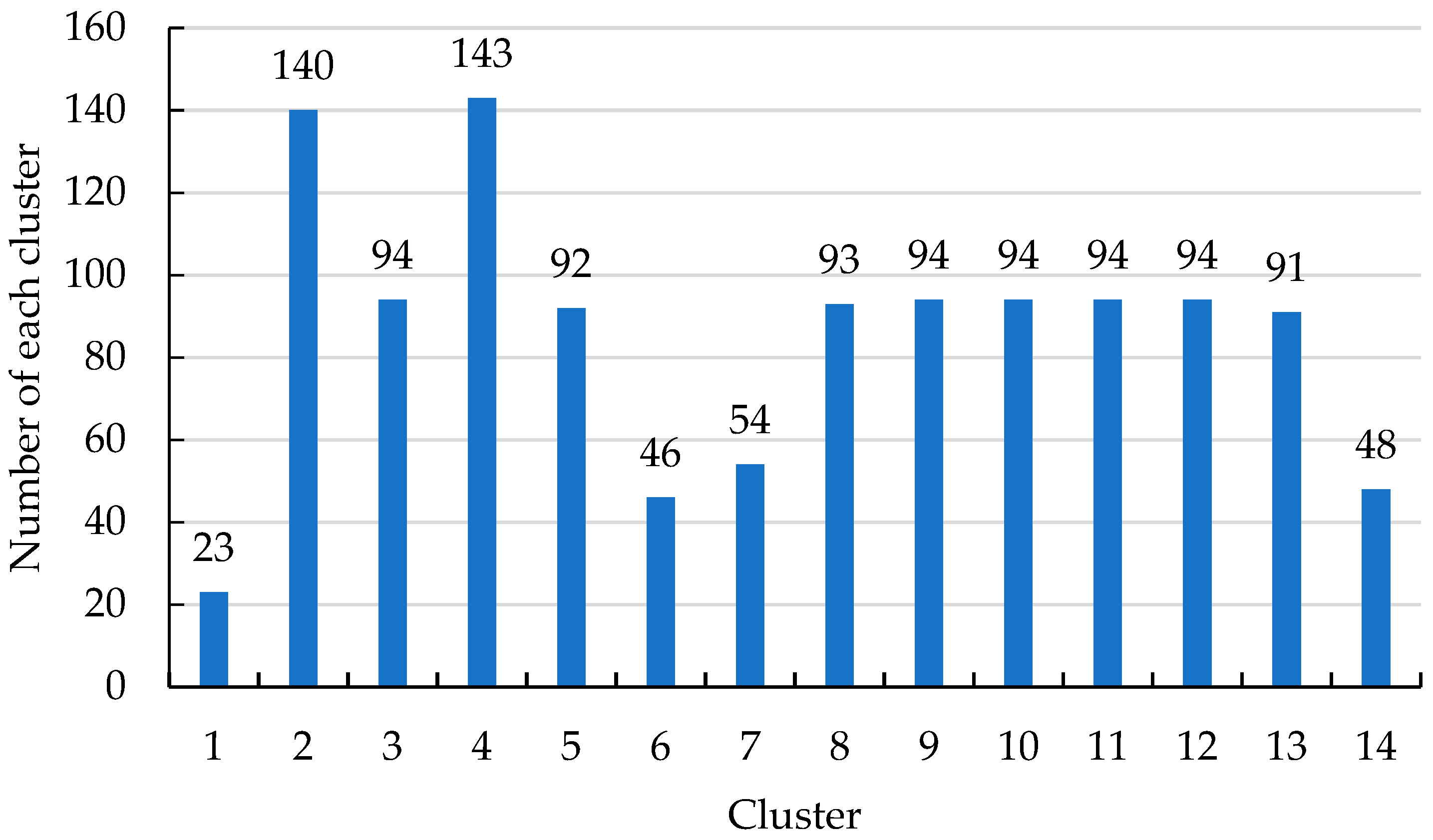
- Identify each sample of the cluster(s) with the lowest number of samples (cluster 1 and cluster 6 in this case).
- Match the samples with the original sheath current samples of the faulty cable and retrieve the data for each sample.
- Find the maximum slope points of each cluster based on the original sheath current sample data.
- Output the corresponding time of the selected cluster data.
5. The Application of the Unsupervised Learning Method with Typical Cable Structures
5.1. Application to a Cross-Bonded HV Cable Circuit
5.2. Application to a MV Cable Circuit
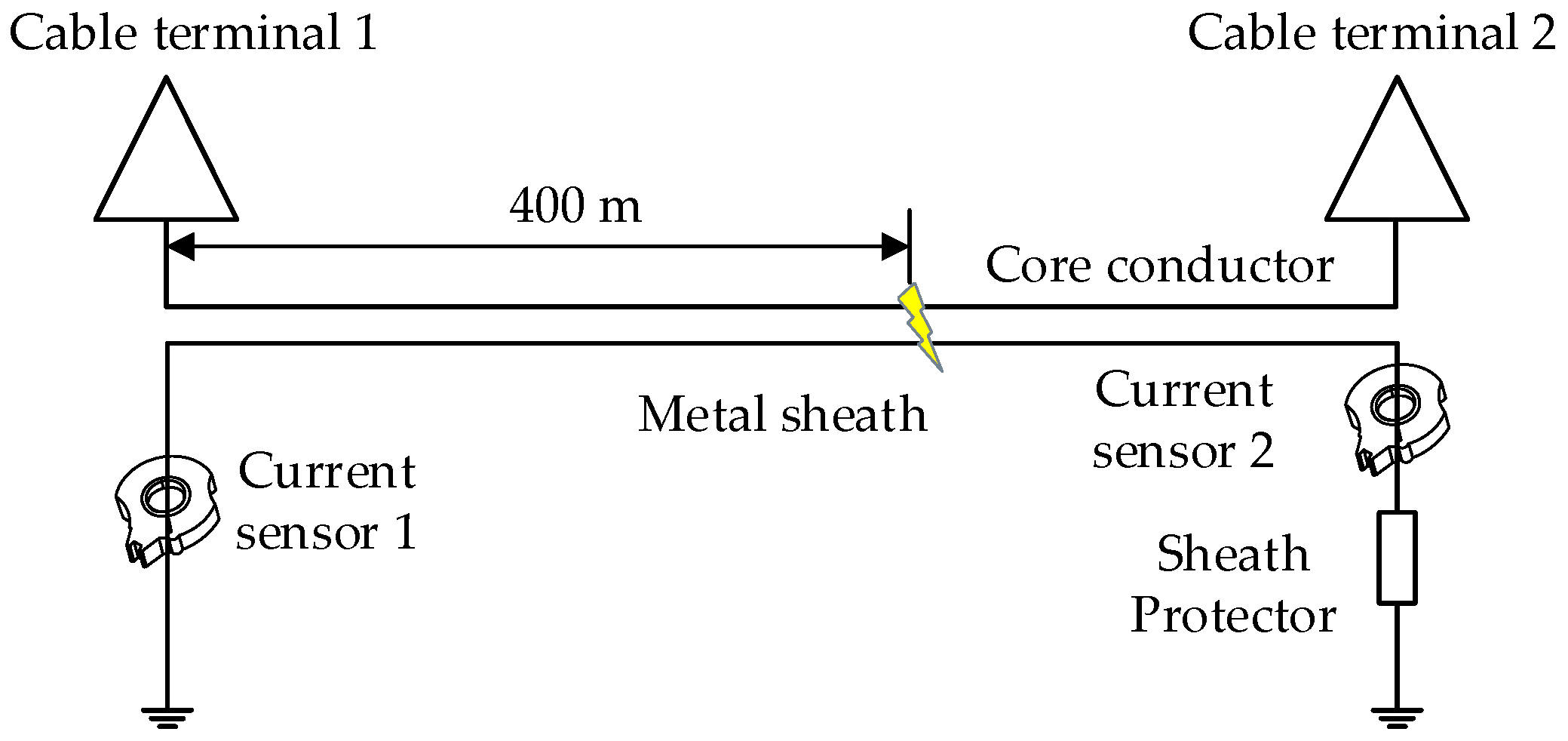
5.3. A Fault Location Test on a MV Cable Circuit
6. The Comparison of Several Popular Algorithms for the Arrival Time Identification
- The threshold method [19,20]: Searches for the first crest of the traveling signal with a set threshold and uses the difference of the trigger time detected by the threshold on the rising edge (or falling edge) of the first crest as the time difference of the two signals. Clearly, this method is susceptible to noise, and a single threshold cannot be determined for all cases. An improvement to this would have the threshold being set by assessment of the first traveling wave crest, with the threshold value being used for subsequent data capture.
- The wavelet-based multi-scale time-frequency analysis method [21,22,23]: The arrival time is identified by the maximum position of the wave crest signal. This method is mainly used for overhead lines, as they have a simpler structure and the method is very susceptible to errors in the accuracy of the line parameters. Ideally, line parameters should be accurate for location of the fault.
- The cumulative energy method [26,27]: The cumulative energy of the signal is determined by the sum of the squares of each sample, with or without a correction term of negative slope. The arrival time of the wave is determined by the absolute minimum of the cumulative energy. Again, the problem of this method still lies in the noise, especially for the slope of the noise wave.
- The method presented in this paper: t-SNE+DBSCAN. The superiority of the method of this paper mainly lies in the processing of multiple signals. However, as this method uses highly nonlinear algorithms, the calculation time is longer.
7. Discussions and Conclusions
7.1. Discussions
7.2. Conclusions
- (1)
- The arrival times of traveling waves can be identified accurately by the proposed method.
- (2)
- The application of the algorithm helped to improve the accuracy of the traveling-wave-based fault location method.
- (3)
- The proposed method can be applied to both HV cables and MV cables (the sheath current monitoring positions are different).
- (4)
- The superiority of the proposed method mainly lies in the processing of multiple signals, especially when there is time deviation of a few signals.
- (5)
- Five popular algorithms for determining wave arrival times were compared. Results indicate that, although the arrival time can be identified accurately by all the five algorithms under ideal conditions, the performance of the proposed method is better than the other four algorithms when white noise is present in the waveforms.
- (6)
- The performance of the proposed method is better than the other four algorithms when there is a random time deviation within the recorded data.
Author Contributions
Funding
Conflicts of Interest
References
- Penaloza, A.K.A.; Ferreira, G.D. Faulted branch location in distribution networks based on the analysis of high- frequency transients. IEEE Lat. Am. Trans. 2018, 16, 2207–2212. [Google Scholar] [CrossRef]
- Bawart, M.; Marzinotto, M.; Mazzanti, G. Diagnosis and location of faults in submarine power cables. IEEE Electr. Insul. Mag. 2016, 32, 24–37. [Google Scholar] [CrossRef]
- Zhang, L. Existence, uniqueness and exponential stability of traveling wave solutions of some integral differential equations arising from neuronal networks. J. Differ. Equ. 2017, 197, 162–196. [Google Scholar] [CrossRef]
- Hamidi, R.J.; Livani, H. Traveling-wave-based fault-location algorithm for hybrid multiterminal circuits. IEEE Tran. Power Deliv. 2017, 32, 135–144. [Google Scholar] [CrossRef]
- Wang, K.; Sun, D.; Zhang, J.; Xu, Y.; Luo, K.; Zhang, N.; Zou, J.; Qiu, L. An acoustically matched traveling-wave thermoacoustic generator achieving 750 W electric power. Energy 2016, 103, 313–321. [Google Scholar] [CrossRef]
- Novosel, D.; Hart, D.G.; Udren, E.; Garitty, J. Unsynchronized two-terminal fault location estimation. IEEE Trans. Power Deliv. 1996, 11, 130–138. [Google Scholar] [CrossRef]
- Li, M.; Zhou, C.; Zhou, W.; Wang, C.; Yao, L.; Su, M.; Huang, X. A novel fault location method for a cross-bonded HV cable system based on sheath current monitoring. Sensors 2018, 18, 3356. [Google Scholar] [CrossRef]
- Dashti, R.; Salehizadeh, S.; Shaker, H.; Tahavori, M. Fault Location in Double Circuit Medium Power Distribution Networks Using an Impedance-Based Method. Appl. Sci. 2018, 8, 1034. [Google Scholar] [CrossRef]
- Lopes, F.V. Settings-free traveling-wave-based earth fault location using unsynchronized two-terminal data. IEEE Trans. Power Del. 2016, 31, 2296–2298. [Google Scholar] [CrossRef]
- Lopes, F.V.; Dantas, K.M.; Silva, K.M.; Costa, F.B.; Lopes, F.; Dantas, K.; Silva, K. Accurate two-terminal transmission line fault location using traveling waves. IEEE Trans. Power Deliv. 2018, 33, 873–880. [Google Scholar] [CrossRef]
- Lei, B.; Xu, G.; Feng, M.; Zou, Y.; Heijden, F.; Ridder, D.; Tax, D. Unsupervised Learning. In Classification, Parameter Estimation and State Estimation, 2nd ed.; JohnWiley & Sons, Ltd.: West Sussex, UK, 2017; pp. 303–348. [Google Scholar]
- Mei, S.; Yang, H.; Yin, Z. An unsupervised-learning-based approach for automated defect inspection on textured surfaces. IEEE Trans. Instrum. Meas. 2018, 67, 1266–1277. [Google Scholar] [CrossRef]
- Trogh, J.; Joseph, W.; Martens, L.; Plets, D. An unsupervised learning technique to optimize radio maps for indoor localization. Sensors 2019, 19, 752. [Google Scholar] [CrossRef]
- Nielsen, A.; Hopkins, A.; Mabuchi, H. Quantum filter reduction for measurement-feedback control via unsupervised manifold learning. New J. Phys. 2009, 11, 105043. [Google Scholar] [CrossRef]
- Saha, M.M.; Izykowski, J.; Rosolowski, E. Fault Location on Power Networks; Springer: London, UK, 2010. [Google Scholar] [CrossRef]
- Chen, X.; Xu, Y.; Cao, X.; Dodd, S.J.; Dissado, L.A. Effect of tree channel conductivity on electrical tree shape and breakdown in XLPE cable insulation samples. IEEE Trans. Dielectr. Electr. Insul. 2011, 18, 847–860. [Google Scholar] [CrossRef]
- Maaten, L.v.d.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. Available online: http://www.jmlr.org/papers/volume9/vandermaaten08a/vandermaaten08a.pdf (accessed on 11 November 2018).
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd ACM SIGKDD, Portland, Oregon, 4–8 August 1996; pp. 226–231. [Google Scholar]
- Marzinotto, M.; Mazzanti, G. The feasibility of cable sheath fault detection by monitoring sheath-to-ground currents at the ends of cross-bonding sections. IEEE Trans. Ind. Appl. 2015, 51, 5376–5384. [Google Scholar] [CrossRef]
- Yang, Y.; Hepburn, D.M.; Zhou, C.; Jiang, W.; Yang, B.; Zhou, W. On-line Monitoring and Trending Analysis of Dielectric Losses in Cross-bonded High Voltage Cable Systems. In Proceedings of the 9th International Conference on Insulated Power Cables, Paris, France, 21−25 June 2015. [Google Scholar]
- Adly, A.R.; El Sehiemy, R.A.; Abdelaziz, A.Y.; Ayad, N.M.A. Critical aspects on wavelet transforms based fault identification procedures in HV transmission line. IET Gener. Transm. Distri. 2015, 10, 508–517. [Google Scholar] [CrossRef]
- Cui, H.; Qiao, Y.; Yin, Y.; Hong, M. An investigation of rolling bearing early diagnosis based on high-frequency characteristics and self-adaptive wavelet de-noising. Neurocomputing 2016, 216, 649–656. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Yang, S.; Hu, Y.; Cao, W. Wavelet packet decomposition-based fault diagnosis scheme for srm drives with a single current sensor. IEEE Trans. Energy Convers. 2016, 31, 303–313. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal. Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Sinaga, H.H.; Phung, B.T.; Blackburn, T.R. Partial discharge localization in transformers using uhf detection method. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 1891–1900. [Google Scholar] [CrossRef]
- Judd, M.; Yang, L.; Hunter, I. Partial discharge monitoring of power transformers using UHF sensors. Part I: Sensors and signal interpretation. IEEE Electr. Insul. Mag. 2005, 21, 5–14. [Google Scholar] [CrossRef]
- Robles, G.; Fresno, J.M.; Martínez-Tarifa, J.M.; Passaro, V.M. Separation of radio-frequency sources and localization of partial discharges in noisy environments. Sensors 2015, 15, 9882–9898. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Outer Radius/mm | |
|---|---|---|
| 1 | Core conductor (Copper) | 17.0 |
| 2 | Inner semi-conductor (Nylon belt) | 18.4 |
| 3 | Main insulation (Ultra-clean XLPE) | 34.4 |
| 4 | Outer semi-conductor (Super-smooth semi-conductive shielding material) | 35.4 |
| 5 | Water-blocking layer (Semi-conductor) | 39.4 |
| 6 | Metal sheath (aluminum) | 43.9 |
| 7 | Jacket (PVC) | 48.6 |
| Structure | Outer Radius/mm | |
|---|---|---|
| 1 | Core conductor (Copper) | 10.30 |
| 2 | Main insulation (including inner and outer semi-conductor) | 16.60 |
| 3 | Metal sheath (Copper tape) | 16.75 |
| 4 | Filler and tape wrapping (semi-conductor) | 36.50 |
| 5 | Metal armor (Steel) | 38.50 |
| 6 | Bedding (Water-blocking PVC) | 40.10 |
| 7 | Jacket (Fire-resistant PVC) | 44.90 |
| TDI* | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| Method | ||||||||
| A | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| B | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| C | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| D | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| E | 2.03 μs | 1.35 μs | 0.68 μs | 0 μs | −0.68 μs | −1.35 μs | −2.03 μs | |
| SNR* | 50 dB | 40 dB | 30 dB | 20 dB | 10 dB | 0 dB | |
| Method | |||||||
| A | −0.68 μs | −0.59 μs | −0.76 μs | −0.54 μs | −0.47 μs | −0.25 μs | |
| B | −0.68 μs | −0.68 μs | −0.63 μs | −0.59 μs | −0.73 μs | −0.37 μs | |
| C | −0.68 μs | −0.68 μs | −0.66 μs | −0.75 μs | −0.75 μs | −0.35 μs | |
| D | −0.68 μs | −0.68 μs | −0.68 μs | −0.67 μs | −0.55 μs | −0.42 μs | |
| E | −0.68 μs | −0.68 μs | −0.68 μs | −0.68 μs | −0.67 μs | −0.53 μs | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Liu, J.; Zhu, T.; Zhou, W.; Zhou, C. A Novel Traveling-Wave-Based Method Improved by Unsupervised Learning for Fault Location of Power Cables via Sheath Current Monitoring. Sensors 2019, 19, 2083. https://doi.org/10.3390/s19092083
Li M, Liu J, Zhu T, Zhou W, Zhou C. A Novel Traveling-Wave-Based Method Improved by Unsupervised Learning for Fault Location of Power Cables via Sheath Current Monitoring. Sensors. 2019; 19(9):2083. https://doi.org/10.3390/s19092083
Chicago/Turabian StyleLi, Mingzhen, Jianming Liu, Tao Zhu, Wenjun Zhou, and Chengke Zhou. 2019. "A Novel Traveling-Wave-Based Method Improved by Unsupervised Learning for Fault Location of Power Cables via Sheath Current Monitoring" Sensors 19, no. 9: 2083. https://doi.org/10.3390/s19092083
APA StyleLi, M., Liu, J., Zhu, T., Zhou, W., & Zhou, C. (2019). A Novel Traveling-Wave-Based Method Improved by Unsupervised Learning for Fault Location of Power Cables via Sheath Current Monitoring. Sensors, 19(9), 2083. https://doi.org/10.3390/s19092083