Thermal Analysis of a Magnetic Brake Using Infrared Techniques and 3D Cell Method with a New Convective Constitutive Matrix


Abstract
1. Introduction
2. The Constitutive Convective Matrix in the CM
2.1. Electromagnetic Equations in the CM
2.2. Thermal Formulation in the Time Domain in the CM
2.3. New Thermal Convective Constitutive Matrix
2.4. Boundary Conditions of the Thermal Problem
3. Infrared Temperature Measurement
3.1. Theoretical Foundations of Thermography
3.2. Infrared Sensors
3.3. Thermographic Camera
4. Results and Discussion
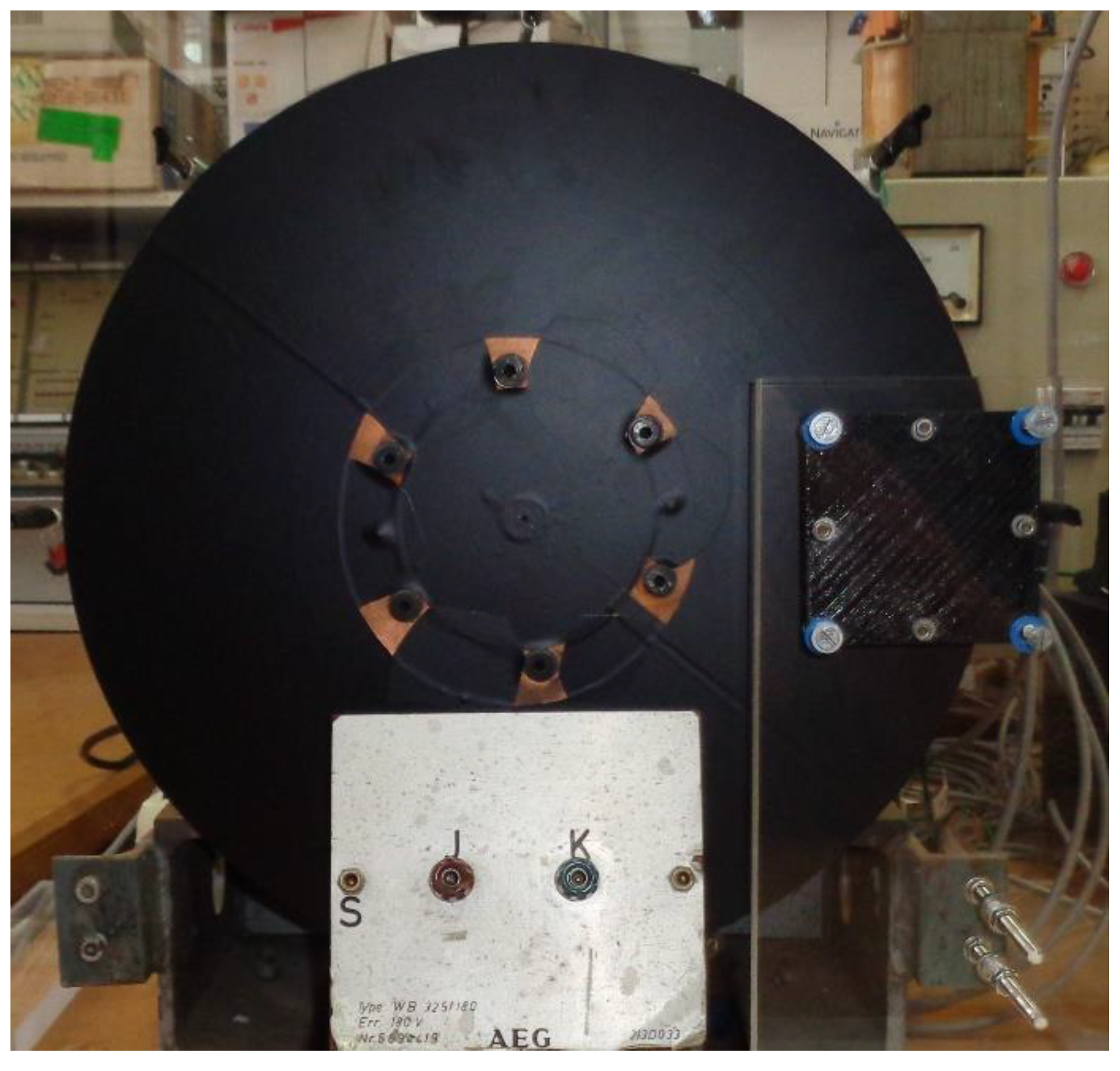
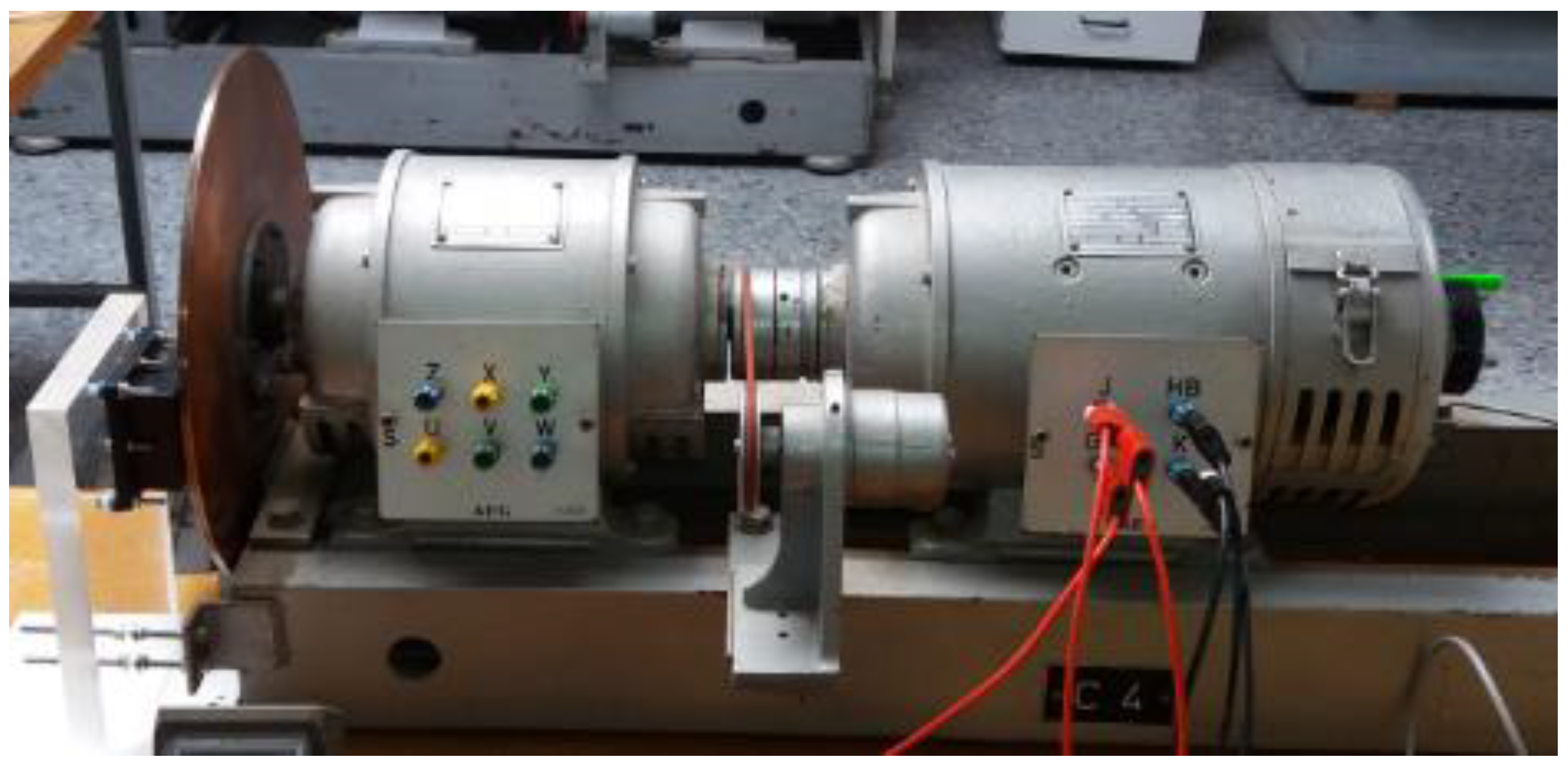
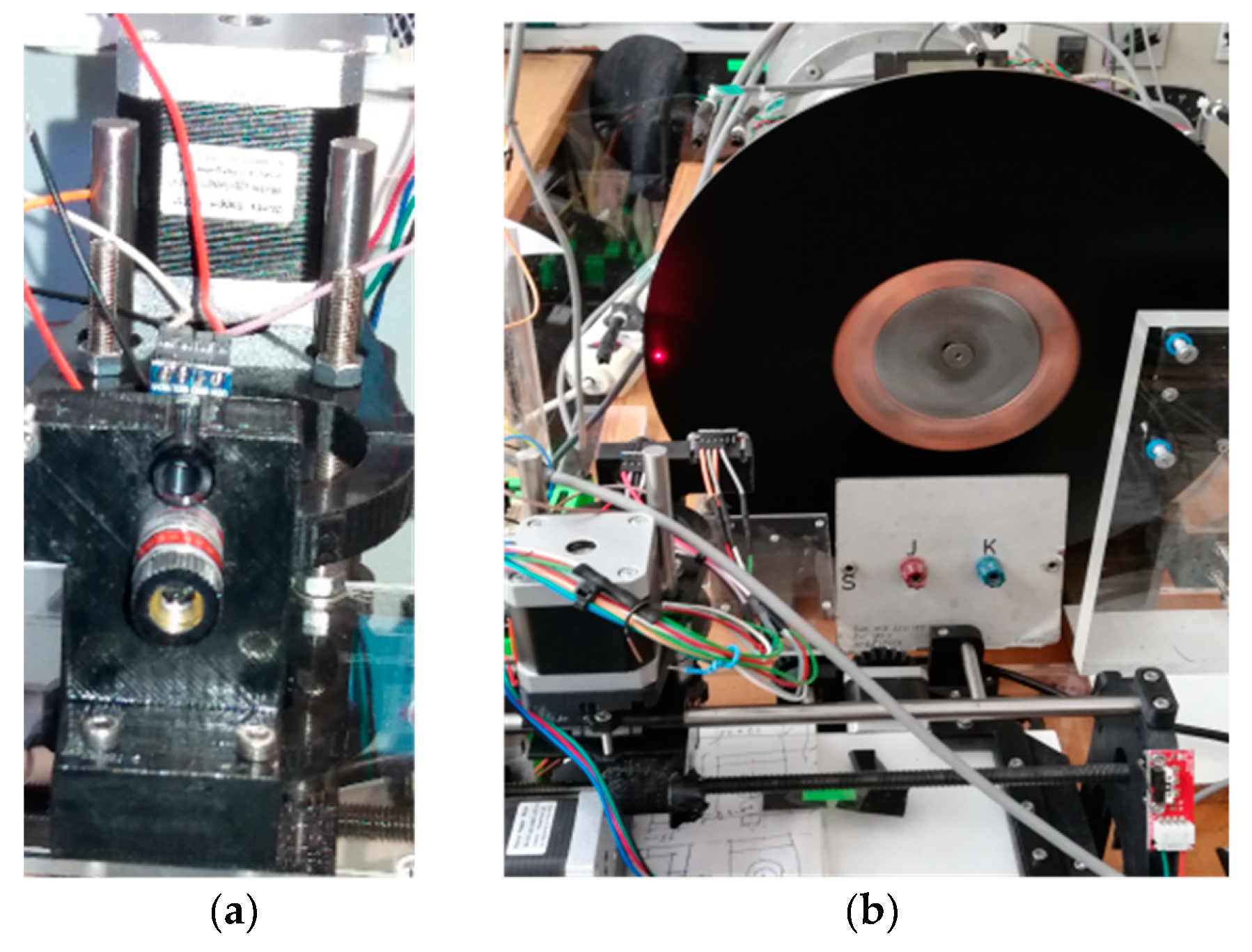
4.1. Description and Characteristics of the Magnetic Brake
4.2. Numerical Validation of the Results in the CM
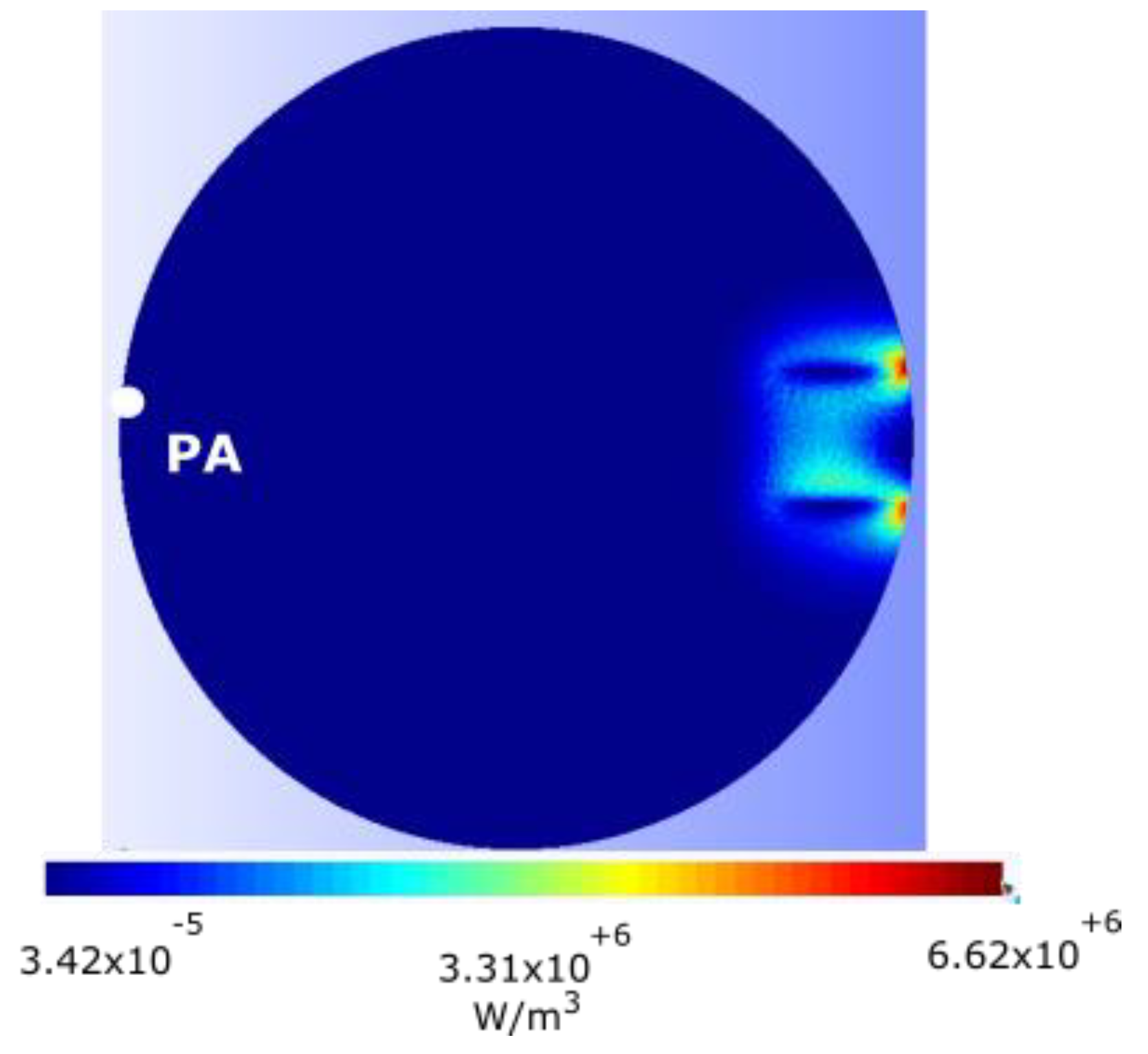
4.2.1. Heat Power Distribution
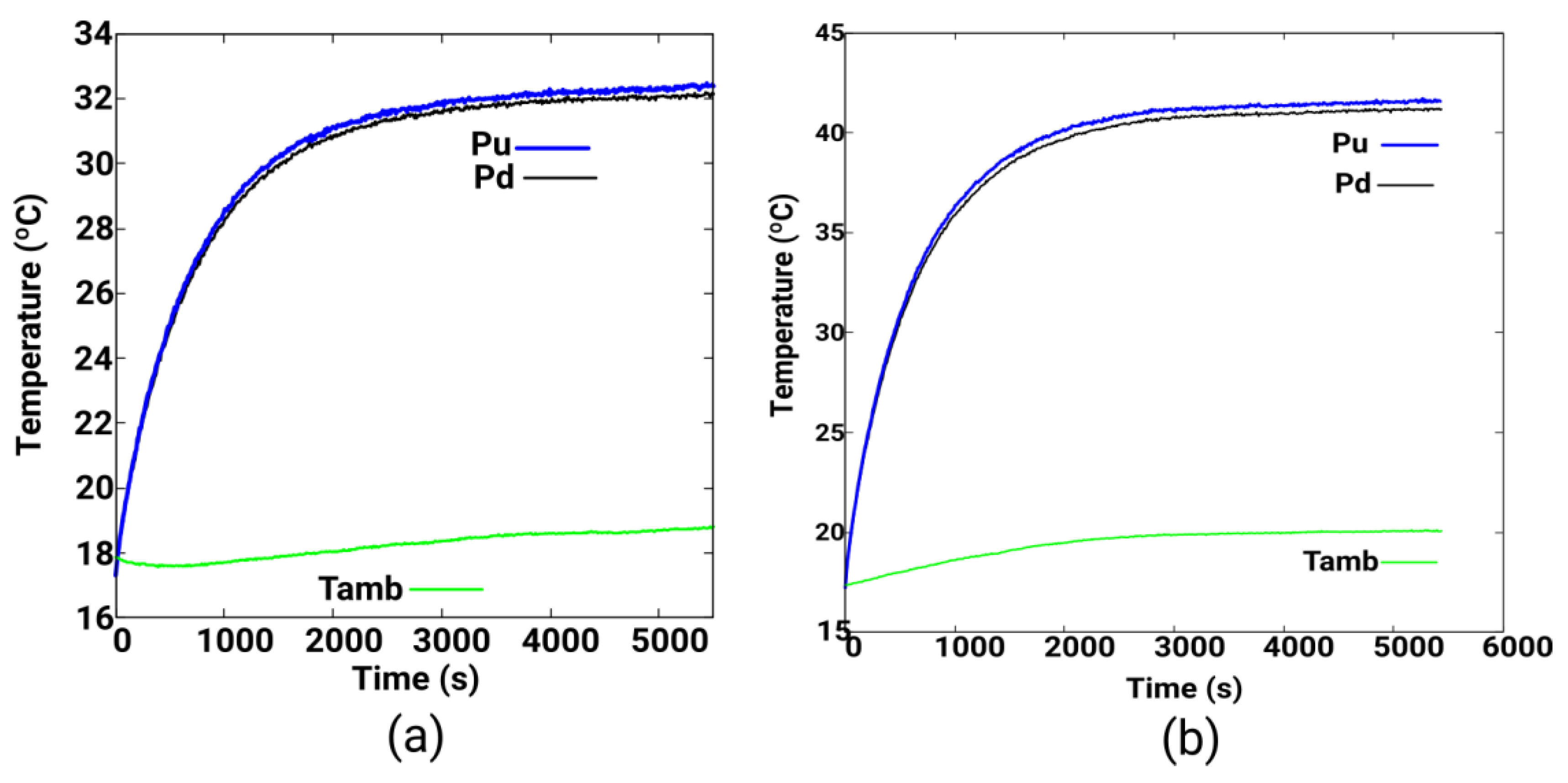
4.2.2. Analysis of the Thermal Transient Regime
4.3. Experimental Validation Using Infrared Sensors
4.3.1. Analytical Calculation of heff
4.3.2. Adjusting heff Using Infrared Technology
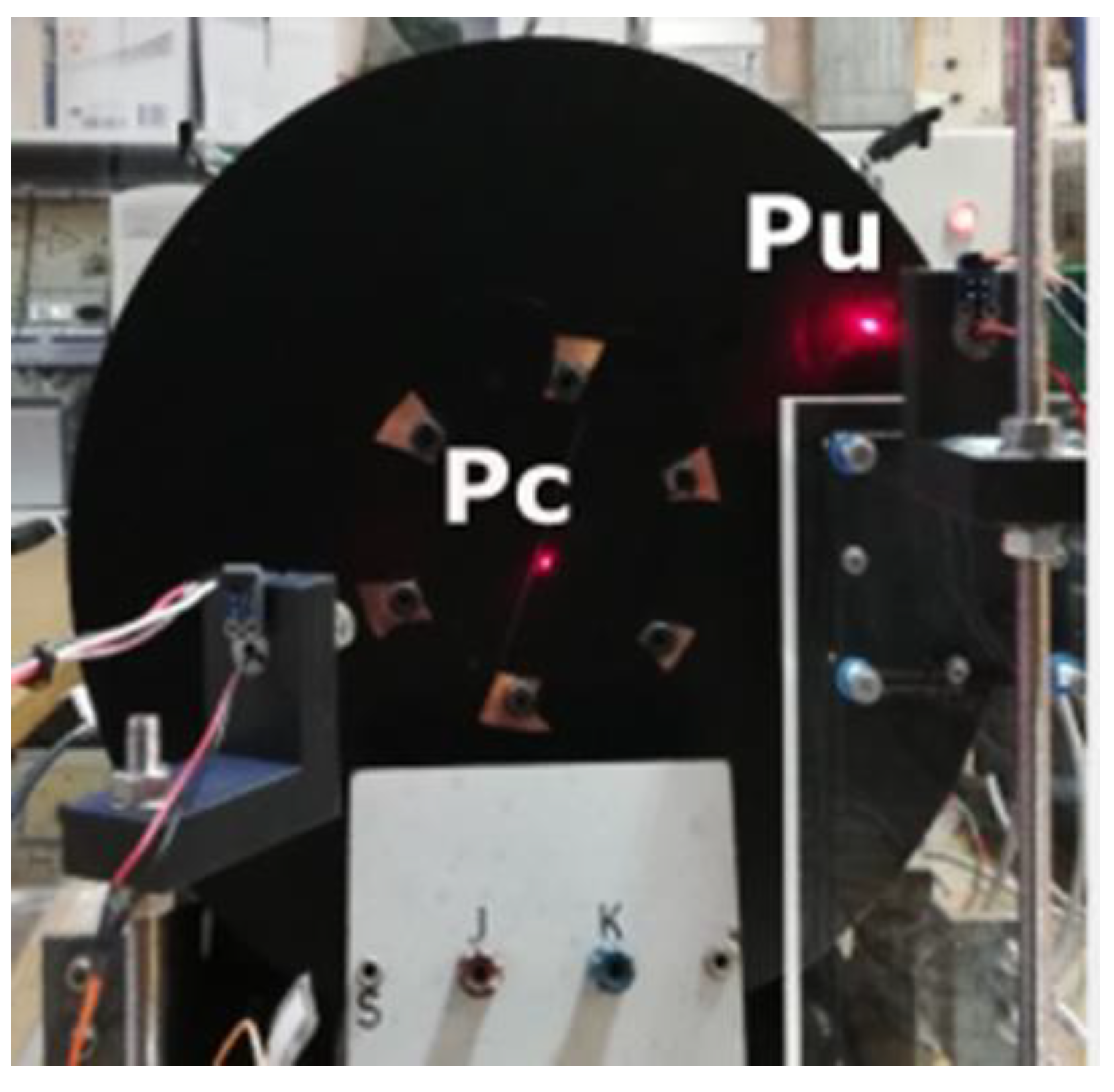
4.3.3. Gradient of the Perimeter and Radial Temperature Measured with Two Infrared Sensors
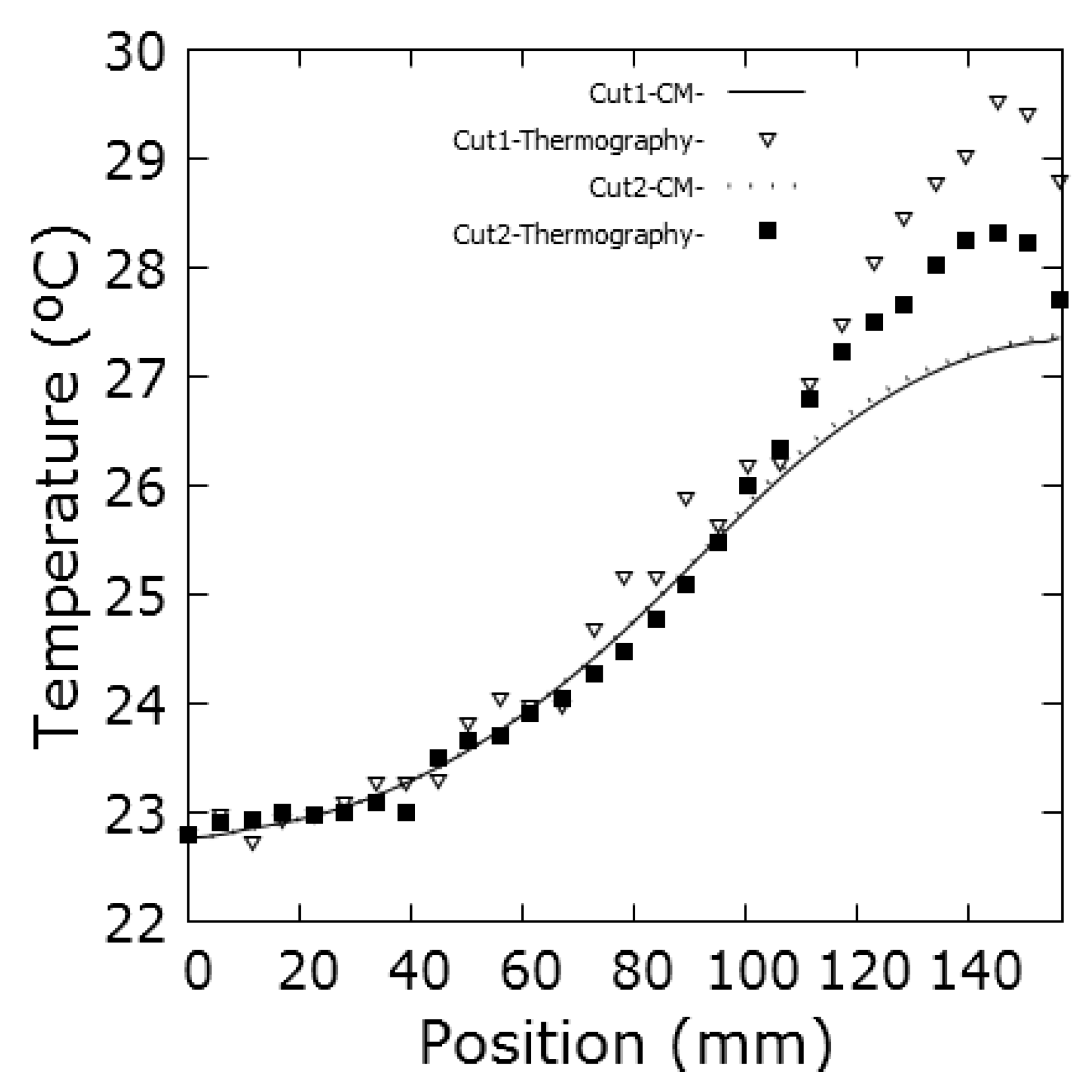
4.3.4. Temperature Distribution on the Surface of the Disk, Obtained by the Infrared Camera
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Name | Unit |
| ϕ | Electric scalar-potential | V |
| a | Magnetic scalar potential | Wb |
| σ | Electric conductivity | S/m |
| Mσ | Electric conductivity constitutive matrix | S |
| σt | Electric conductivity of the tetrahedron | S/m |
| Magnetic induction | Wb/m2 | |
| C, | Incidence matrix faces-edges in primal and dual mesh | - |
| Incidence matrix face-volume of dual mesh | - | |
| G | Incidence matrix edges-nodes of primal mesh | - |
| VLo | Vector of Lorentz | s−1 |
| Mν, | Magnetic Constitutive matrix | A/Wb |
| W | Angular frequency | 1/s |
| Lineal velocity | m/s | |
| Angular velocity | 1/s | |
| t | Time | s |
| Current density | A/m2 | |
| Length edge of vector | m | |
| Vt | Volume of tetrahedron | m3 |
| Barycentre velocity of the tetrahedron | m/s | |
| Unitary vectors | - | |
| surface vector of dual mesh | m2 | |
| Radial vector pointing from the centre of the disk | m | |
| Coercive magnetomotive forces of the magnet | A | |
| j | Imaginary unit | - |
| Constitutive matrix in heat transmission in transitory state | J/K | |
| T | Temperature | K |
| Heat source in dual volume | W | |
| Thermal conductivity constitutive matrix | W/K | |
| New convective constitutive matrix | W/K | |
| Convective heat power flow in dual surface | W | |
| Total heat power flow in the dual surface | W | |
| Conductive heat power flow in dual surface | W | |
| Heat density flow in dual surface | W/m2 | |
| Density | kg/m3 | |
| Heat capacity | J/kgK | |
| Barycentric coordinates | - | |
| s | Surface | m2 |
| Orthogonal unitary vector to dual surface | - | |
| Effective heat transfer coefficient | W/Km2 | |
| Convective heat transfer coefficient | W/Km2 | |
| Convective heat density flow | W/m2 | |
| Ambient temperature | K | |
| Boundary convective heat flow | W | |
| Total emissive power | W/m2 |
References
- Shin, K.; Park, H.; Cho, H.; Choi, J. Semi-three-dimensional analytical torque calculation and experimental testing of an eddy current brake with permanent magnets. IEEE Trans. Appl. Superconduct. 2018, 28, 5203205. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, W.; Li, B.; Liu, X.; Gao, C.; Gu, Z. Investigation of electromagnetic, thermal and mechanical characteristics of a five-phase dual-rotor permanent-magnet synchronous motor. Energies 2015, 8, 9688–9718. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Q.; Liang, Q.; Ji, K.; Liu, M.Y.; Peng, T.; Li, L. Electromagnetic-thermal modeling of electromagnetic brake using finite-element analysis. Appl. Mech. Mater. 2013, 392, 290–294. [Google Scholar] [CrossRef]
- Gay, S.E.; Ehsani, M. Parametric analysis of eddy-current brake performance by 3-d finite-element analysis. IEEE Trans. Magn. 2006, 42, 319–328. [Google Scholar] [CrossRef]
- Jang, S.M.; Lee, S.-H. Comparison of three types of permanent magnet linear eddy-current brakes according to magnetization pattern. IEEE Trans. Magn. 2003, 39, 3004–3006. [Google Scholar] [CrossRef]
- Zhang, B.; Peng, T.; Chen, Q.; Cao, Q.; Ji, K.; Shuang, B.; Ye, J.J.; Li, L. 3-d nonlinear transient analysis and design of eddy current brake for high-speed trains. Int. J. Appl. Electromagn. Mech. 2012, 40, 205–214. [Google Scholar] [CrossRef]
- Tonti, E. Finite formulation of the electromagnetic field. Prog. Electromagn. Res. 2001, 32, 1–44. [Google Scholar] [CrossRef]
- Tonti, E. A Direct Discrete Formulation of Field Laws: The Cell Method. CMES Comput. Model. Eng. Sci. 2001, 2, 237–258. [Google Scholar]
- Monzón-Verona, J.M.; Santana-Martín, F.J.; García–Alonso, S.; Montiel-Nelson, J.A. Electro-Quasistatic Analysis of an Electrostatic Induction Micromotor Using the Cell Method. Sensors 2010, 10, 9102–9117. [Google Scholar] [CrossRef] [PubMed]
- Tonti, E. Why starting from differential equations for computational physics? J. Comput. Phys. 2014, 257, 1260–1290. [Google Scholar] [CrossRef]
- Tonti, E. The Mathematical Structure of Classical and Relativistic Physics; Birkhäuser: Basel, Switzerland, 2013; p. 17. ISBN -9781461474210. [Google Scholar]
- Usamentiaga, R.; Fernando García, D. Infrared Thermography Sensor for Temperature and Speed Measurement of Moving Material. Sensors 2017, 17, 1157. [Google Scholar] [CrossRef]
- Monzón-Verona, J.M.; González-Domínguez, P.I.; García-Alonso, S. New constitutive matrix in the 3D cell method to obtain a Lorentz electric field in a magnetic brake. Sensors 2018, 18, 3185. [Google Scholar] [CrossRef]
- Specogna, R.; Trevisan, F. Discrete constitutive equations in A-χ geometric eddy-current formulation. IEEE Trans. Magn. 2005, 41, 1259–1263. [Google Scholar] [CrossRef]
- Alotto, P.; Bullo, M.; Guarnieri, M.; Moro, F. A coupled thermoelectromagnetic formulation based on the cell method. IEEE Trans. Magn. 2008, 44, 702–705. [Google Scholar] [CrossRef]
- González-Domínguez, P.I.; Monzón-Verona, J.M.; Simón, L.; de Pablo, A. Thermal constitutive matrix applied to asynchronous electrical machine using the cell method. Open Phys. 2018, 16, 27–30. [Google Scholar] [CrossRef]
- Voitovich, T.V.; Vandewalle, S. Exact integration formulas for the finite volume element method on simplicial meshes. Numer. Methods Partial Differ. Equ. 2007, 23, 1059–1082. [Google Scholar] [CrossRef]
- Wichmann, E.H. Física Cuántica; Editorial Reverté: Barcelona, Spain, 1979; Chapter 1; pp. 27–30. ISBN -84-291-4024-7. [Google Scholar]
- Eisberg, R.; Resnick, R. Física Cuántica, Átomos, Moléculas, Sólidos, Núcleos y Partículas; Editorial Limusa: México, México, 1978; Chapter 1; pp. 22–44. ISBN -13: 9789681804190. [Google Scholar]
- Melexis Inspired Engineering. Available online: https://www.melexis.com/en/product/MLX90614/Digital-Plug-Play-Infrared-Thermometer-TO-Can (accessed on 13 February 2019).
- Merlin Lazer. Available online: http://www.merlinlazer.com/T425-Thermal-Imaging-Camera (accessed on 13 February 2019).
- Geuzaine, C. GetDP: A general finite-element solver for the de Rham complex. In PAMM Volume 7 Issue 1. Special Issue: Sixth International Congress on Industrial Applied Mathematics (ICIAM07) and GAMM Annual Meeting, Zürich 2007; Wiley: Berlin, Germany, 2008; Volume 7, pp. 1010603–1010604. [Google Scholar]
- Portable, Extensible Toolkit for Scientific Computation. Available online: http://www.mcs.anl.gov/petsc (accessed on 19 March 2019).
- Geuzaine, G.; Remacle, J.-F. Gmsh: A three-dimensional finite element mesh generator with built-in preand post-processing facilities. Int. J. Numer. Methods Eng 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Howey, D.A.; Holmes, A.S.; Pullen, K.R. Measurement and CFD Prediction of Heat Transfer in Air-Cooled Disc-Type Electrical Machines. IEEE Trans. Ind. Appl. 2011, 47, 1176–1723. [Google Scholar] [CrossRef]
- Harmand, S.; Pellé, J.; Poncet, S.; Shevchuk, I.V. Review of fluid flow and convective heat transfer within rotating disk cavities with impinging jet. Int. J. Therm. Sci. 2013, 67, 1–30. [Google Scholar] [CrossRef]
- Millsaps, K.; Polhausen, K. Heat transfer by laminar flow from a rotating plate. J. Aeronaut. Sci. 1952, 19, 120–126. [Google Scholar] [CrossRef]
- Goldstein, S. On the resistance to the rotation of a disc immersed in a fluid. Math. Proc. Camb. Philos. Soc. 1935, 31, 232–241. [Google Scholar] [CrossRef]
- Hartnett, J.P. Heat transfer from a non-isothermal disk rotating in still air. J. Heat Transf. 1959, 81, 672–673. [Google Scholar]
- Yunus, A.; Cimbala, J.M.; Sknarina, S.F. Mecánica de Fluidos: Fundamentos y Aplicaciones; Annex 1: Tables of air properties at 1 atm of presure; Table A-9, 1ª edición; McGraw-Hill: New York, NY, USA, 2006; ISBN 970-10-5612-4. [Google Scholar]
- Maxim Integrated. Available online: https://www.maximintegrated.com/en/products/sensors/DS18B20.html (accessed on 13 February 2019).
- Schindelin, J.; Arganda-Carreras, I.; Frise, E.; Kaynig, V.; Longair, M.; Pietzsch, T.; Preibisch, S.; Rueden, C.; Saalfeld, S.; Schmid, B.; et al. Fiji: An open-source platform for biological-image analysisl. Nat. Methods 2012, 9, 676–682. [Google Scholar]
- Martínez Rodríguez, E. Errores frecuentes en la interpretación del coeficiente de determinación lineal. Anuario Jurídico y Económico Escurialense 2005, XXXVIII, 317–331. [Google Scholar]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef]
- Sanabria, J.; García, J.; Lhomme, J.P. Calibración y Validación de Modelos de Pronóstico de Heladas en el Valle del Mantaro; ECIPERU: Lima, Peru, 2006; ISSN 1813-0194. p. 18. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison | C1 | C2 | C3 | C4 | C5 | C6 | References |
|---|---|---|---|---|---|---|---|
| R2 [0, +1] Optimum: +1 | 1.0000 | 0.9999 | 1.0000 | 0.9999 | 0.9848 | 0.9733 | [33] |
| RMSPE [−1, +1] Optimum: 0 | 0.0459 | 0.0146 | 0.0029 | 0.0024 | 0.0183 | 0.0365 | [34] |
| MAEP [−1, +1] Optimum: 0 | 0.0342 | 0.0119 | 0.0024 | 0.0020 | 0.0125 | 0.0238 | [34] |
| PBIAS [−1, +1] Optimum: 0 | 0.0330 | 0.0111 | 0.0022 | 0.0020 | 0.0085 | −0.0234 | [35] |
| C1: | Comparison of the global heat power in the disk as a function of wr, for d = 3, using the CM and the FEM. See Figure 9. |
| C2: | Comparison of the global heat power in the disk as a function of wr, for d = 5 mm, using the CM and the FEM. See Figure 9. |
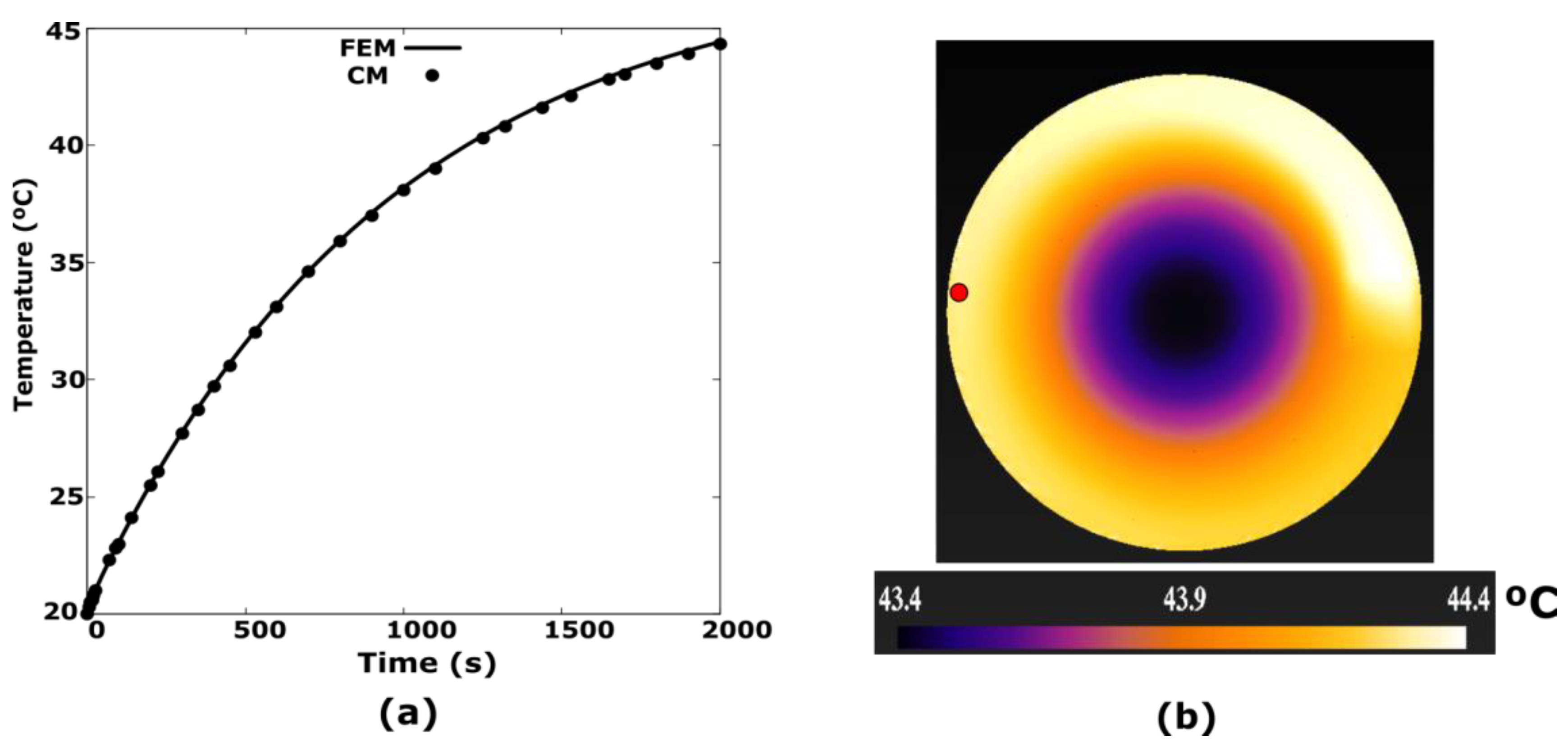
| C3: | Transient temperature regime at the red point, using CM and FEM with a uniform heat power density. See Figure 10a. |
| C4: | Verification of the simulation of the transient regime at point P2 versus the experimental data. See Figure 15. |
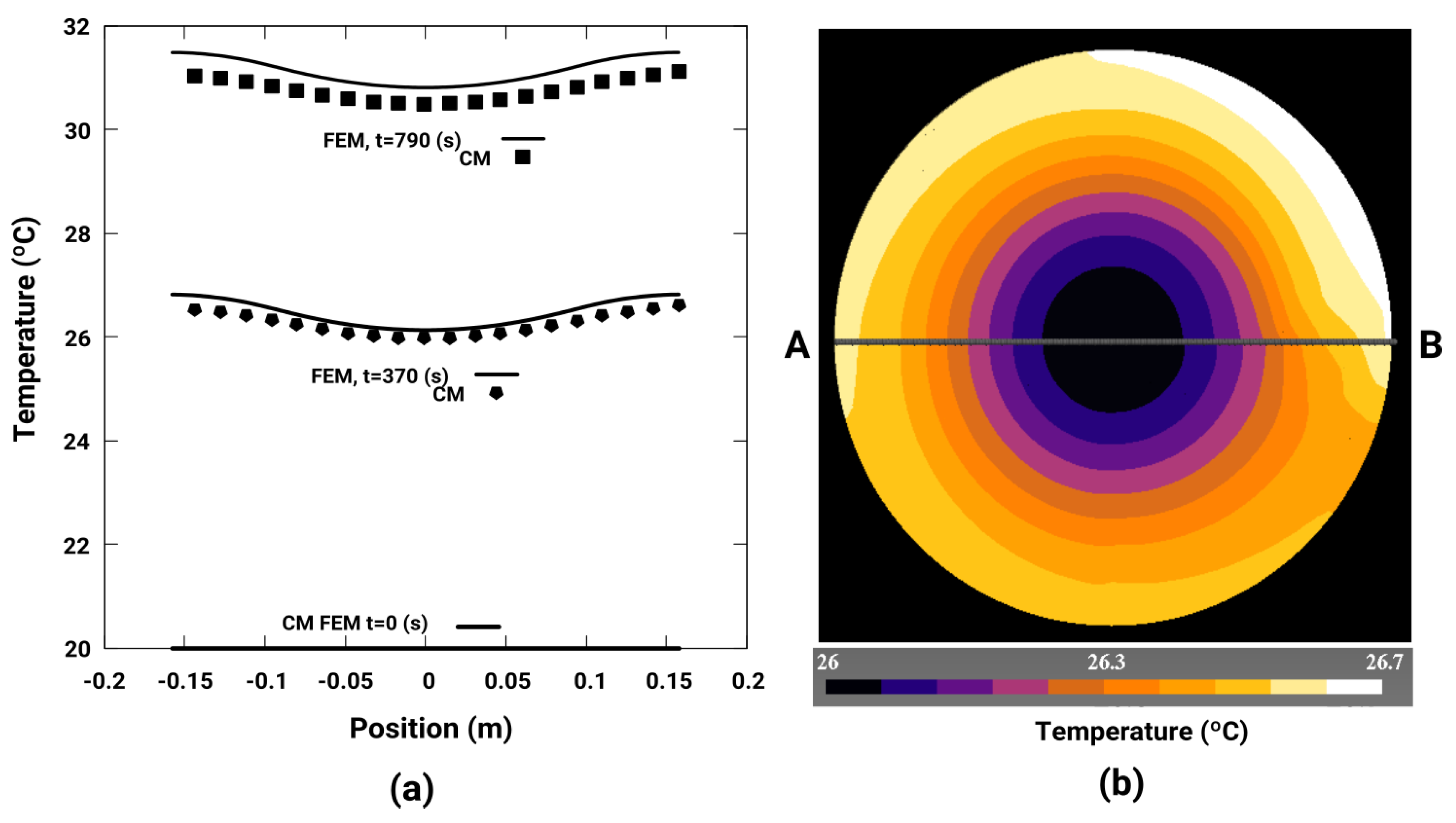
| C5: | Temperatures obtained by CM in the parametric section Cut1. See Figure 26. |
| C6: | Temperatures obtained by CM in the parametric sections Cut2. See Figure 26. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monzón-Verona, J.M.; González-Domínguez, P.I.; García-Alonso, S.; Santana-Martín, F.J.; Cárdenes-Martín, J.F. Thermal Analysis of a Magnetic Brake Using Infrared Techniques and 3D Cell Method with a New Convective Constitutive Matrix. Sensors 2019, 19, 2028. https://doi.org/10.3390/s19092028
Monzón-Verona JM, González-Domínguez PI, García-Alonso S, Santana-Martín FJ, Cárdenes-Martín JF. Thermal Analysis of a Magnetic Brake Using Infrared Techniques and 3D Cell Method with a New Convective Constitutive Matrix. Sensors. 2019; 19(9):2028. https://doi.org/10.3390/s19092028
Chicago/Turabian StyleMonzón-Verona, José Miguel, Pablo Ignacio González-Domínguez, Santiago García-Alonso, Francisco Jorge Santana-Martín, and Juan Francisco Cárdenes-Martín. 2019. "Thermal Analysis of a Magnetic Brake Using Infrared Techniques and 3D Cell Method with a New Convective Constitutive Matrix" Sensors 19, no. 9: 2028. https://doi.org/10.3390/s19092028
APA StyleMonzón-Verona, J. M., González-Domínguez, P. I., García-Alonso, S., Santana-Martín, F. J., & Cárdenes-Martín, J. F. (2019). Thermal Analysis of a Magnetic Brake Using Infrared Techniques and 3D Cell Method with a New Convective Constitutive Matrix. Sensors, 19(9), 2028. https://doi.org/10.3390/s19092028