Optimal Path Planning for Selective Waste Collection in Smart Cities

 ,
,  ,
,  and
and
Abstract
1. Introduction
- -
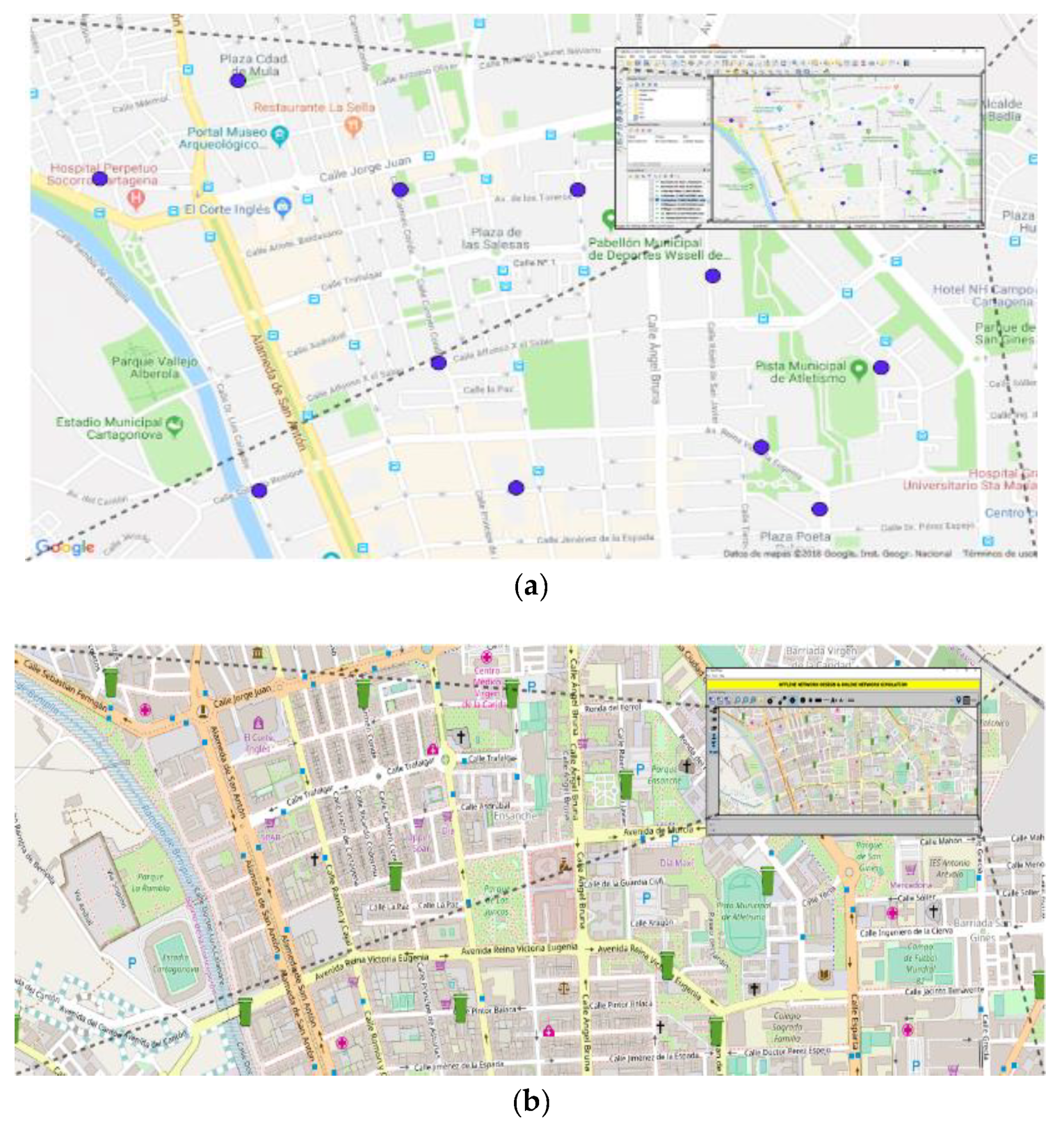
- City layout given by a Geographical Information System (GIS) database, that includes information of roads, location of containers in streets.
- -
- Number of trucks available and their capacity.
- -
- Capacity and filling level in containers collected by smart devices (e.g., sensors with general packet radio service (GPRS) module) attached to waste containers.
- -
- Fill level threshold, which fixes the set of containers that must be emptied.
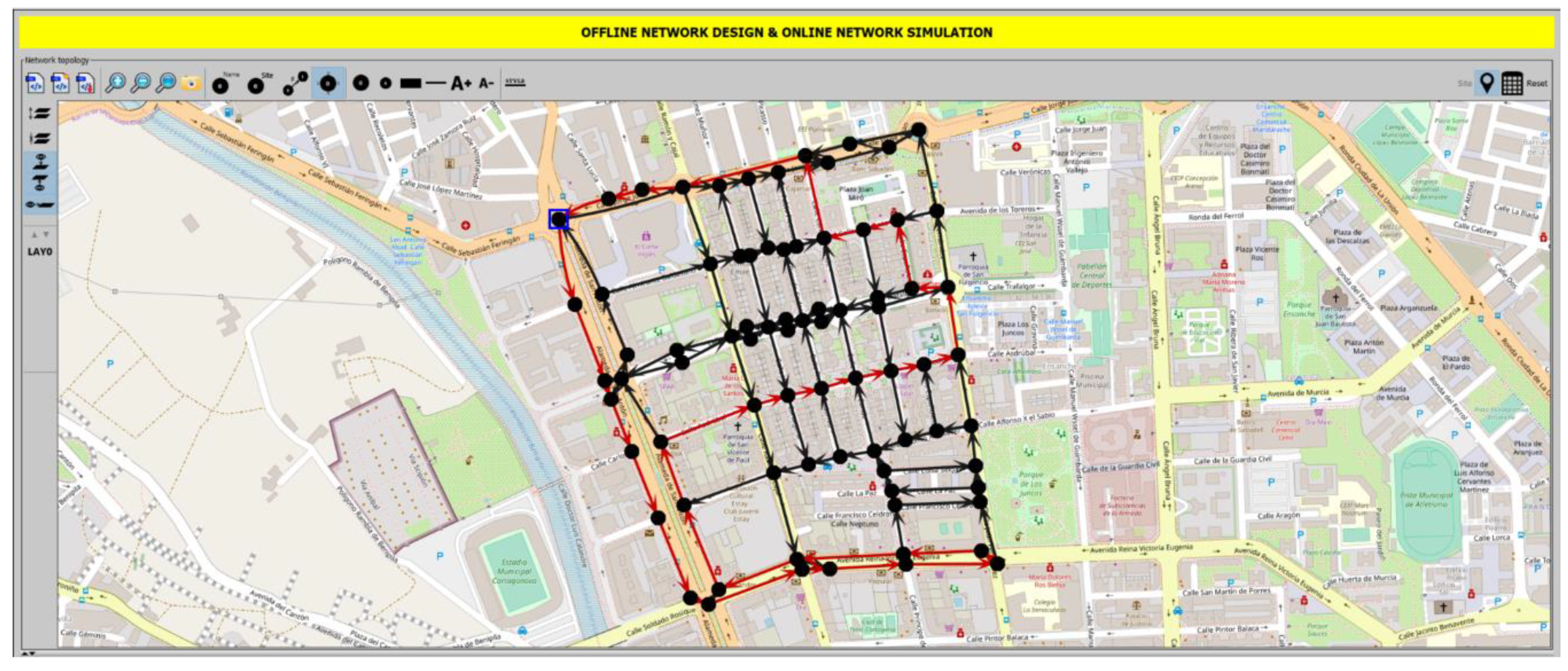
- Using the above information, the algorithm jointly calculates the optimal number of trucks to use and the path they have to follow for collecting the waste of those containers with a fill level equal or higher than the threshold, minimizing the routes (total distance in km), which are directly related to fuel consumption, amount of CO2 emissions and waste collected.
2. Related Work
- The proposal of an optimization algorithm that jointly optimizes the number of trucks to use and their routes, also permitting setting constraints on the number of times a street can be traversed, e.g., to limit the acoustic impact in the neighborhood.
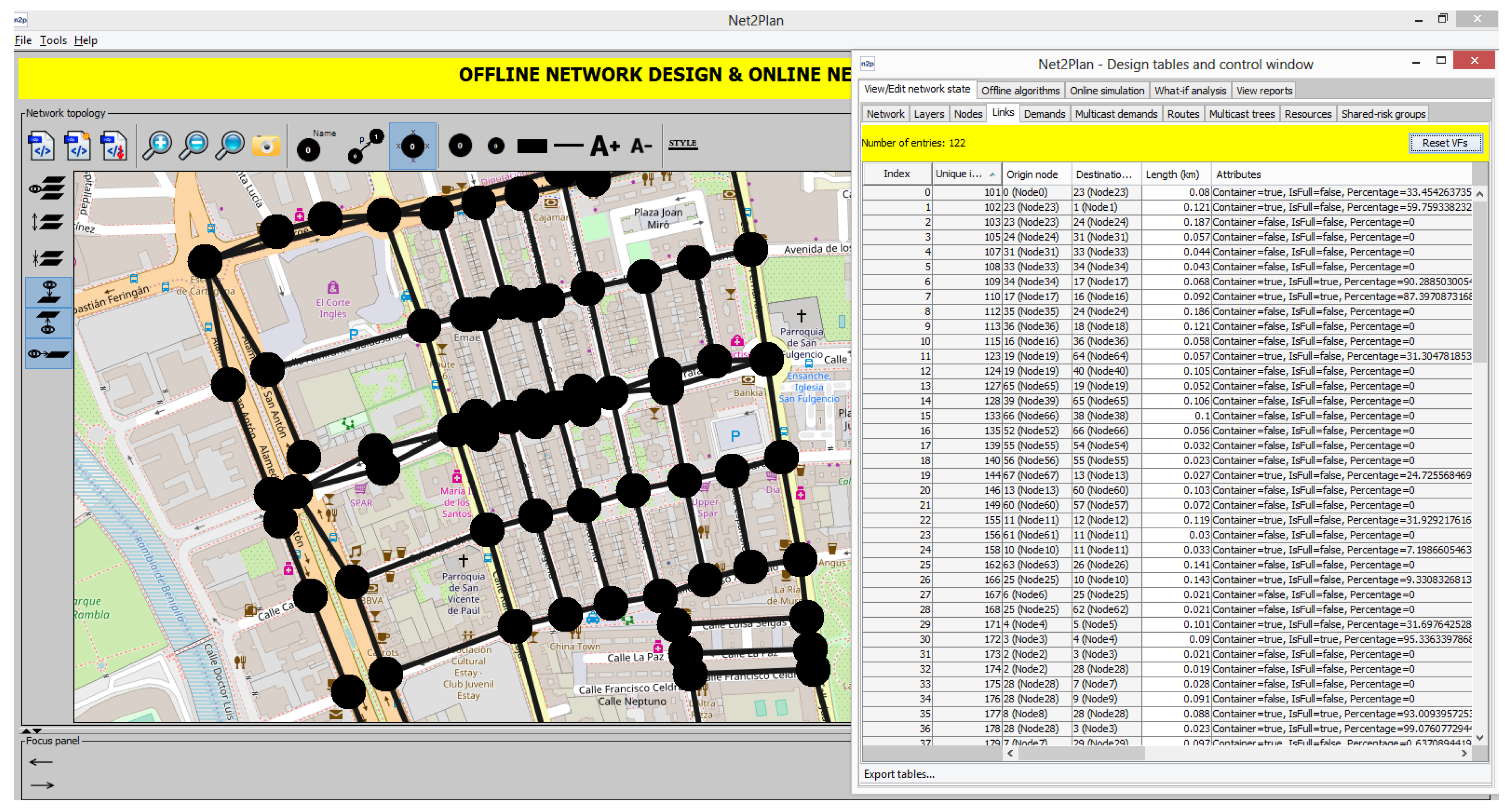
- Our algorithm integrates into the Net2Plan-GIS open-source framework. This facilitates introducing GIS information into the problem, applying the algorithm in real-life use cases. In addition, the framework automatically computes a number of economic and environmental performances like fuel consumption or CO2 emissions.
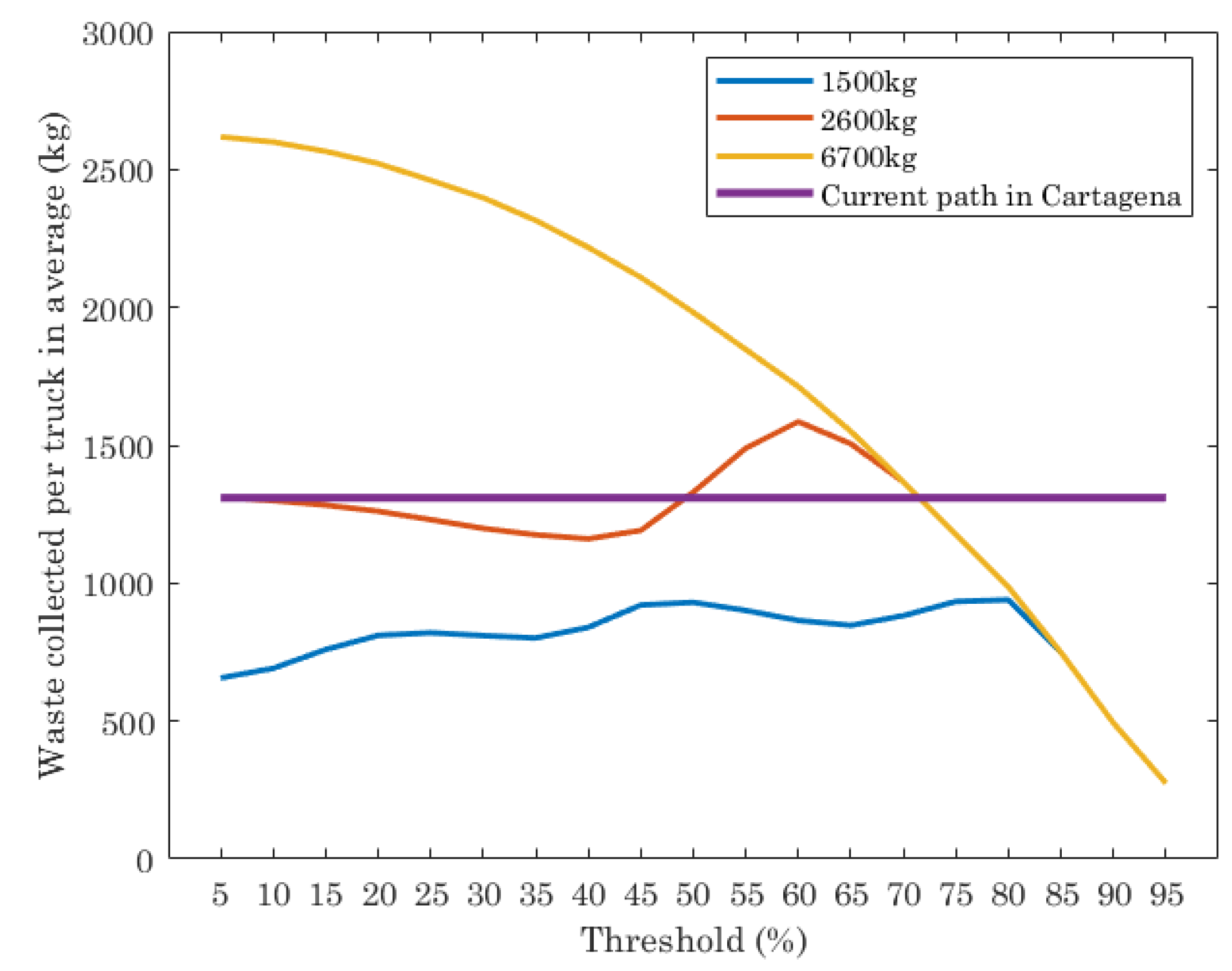
- To showcase the practical interest of our proposal, we present a realistic use case in the city of Cartagena (Spain), where we assess the benefits of using smart bins in the waste collection in a part of the city. Our algorithm is used to evaluate the effects of applying different fill level thresholds for deciding when to collect a bin and the benefits of optimizing also the number of trucks to be used.
3. Optimal Path Planning Algorithm for Waste Collection
- -
- E is the set of roads in the city (or area under study). Each road in the street is denoted as a one-way link e E. The length (in km) of each link is denoted as .
- -
- N is the set of intersections among roads. Each intersection is denoted as a node n N. n N, there is a set of incoming links δ−(n) and outgoing links δ+(n).
- -
- The location (streets, roads) of those containers with a fill level equal or higher than a threshold is managed as a subset of E, denoted as E’. Without loss of generality, each link is assumed to have at most one container. Modeling multiple containers is possible by transforming the link into a concatenation of as many links as containers.
- -
- T: maximum number of trucks to use, t {1, 2, …, T}.
- -
- B: maximum length in km that a truck is allowed to traverse.
- -
- S: cost of using a truck in the route understood as the cost of truck maintenance and driver salary.
- -
- M: cost per km travelled by a truck.
- -
- Z: collection threshold.
- -
- : percentage of waste per container (filling percentage).
- -
- container capacity.
- -
- : maximum number of truck passes allowed in road e.
- -
- : truck capacity.
- -
- nsN: origin node of trucks’ routes.
- -
- nfN: destination node of trucks’ routes.
4. Case Study: Optimal Waste Collection in Cartagena City
4.1. Net2Plan Tool and Net2Plan-Geographical Information Systems (GIS) Extension
4.2. Area under Study: Downtown Cartagena
4.3. Truck Model for Waste Collection
4.4. Smart Waste Container
5. Formulation Parameters
6. Results
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sánchez, L.; Elicegui, I.; Cuesta, J.; Muñoz, L.; Lanza, J. Integration of utilities infrastructures in a future internet enabled smart city framework. Sensors 2013, 13, 14438–14465. [Google Scholar] [CrossRef] [PubMed]
- Mahapatra, C.; Moharana, A.K.; Leung, V.C.M. Energy management in smart cities based on internet of things: Peak demand reduction and energy savings. Sensors 2017, 17, 2812. [Google Scholar] [CrossRef] [PubMed]
- Pasolini, G.; Buratti, C.; Feltrin, L.; Zabini, F.; De Castro, C.; Verdone, R.; Andrisano, O. Smart city pilot projects using LoRa and IEEE802.15.4 technologies. Sensors 2018, 18, 1118. [Google Scholar] [CrossRef] [PubMed]
- Anagnostopoulos, T.; Zaslavsky, A.; Kolomvatsos, K.; Medvedev, A.; Amirian, P.; Morley, J.; Hadjieftymiades, S. Challenges and opportunities of waste management in IoT-enabled smart cities: A survey. IEEE Trans. Sustain. Comput. 2017, 2, 275–289. [Google Scholar] [CrossRef]
- Zsigraiova, Z.; Semiao, V.; Beijoco, F. Operation costs and pollutant emissions reduction by definition of new collection scheduling and optimization of MSW collection routes using GIS. The case study of Barreiro, Portugal. Waste Manag. 2013, 33, 793–806. [Google Scholar] [CrossRef] [PubMed]
- Reddy, P.S.N.; Naik, R.N.; Kumar, A.A.; Kishor, S.N. Wireless dust bin monitoring and alert system using Arduino. In Proceedings of the Second International Conference on Electrical, Computer and Communication Technologies (ICECCT), Tamil Nadu, India, 22–24 February 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Muyunda, N.; Ibrahim, M. Arduino-based smart garbage monitoring system: Analysis requirement and implementation. In Proceedings of the International Conference on Computer and Drone Applications (IConDA), Kuching, Malaysia, 9–11 November 2017; pp. 28–32. [Google Scholar] [CrossRef]
- Tiwari, C.; Nagarathna, K. Waste management using solar smart bin. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Tamilnadu, India, 1–2 August 2017; pp. 1123–1126. [Google Scholar] [CrossRef]
- Lozano, Á.; Caridad, J.; De Paz, J.F.; Villarrubia González, G.; Bajo, J. Smart waste collection system with low consumption LoRaWAN nodes and route optimization. Sensors 2018, 18, 1465. [Google Scholar] [CrossRef] [PubMed]
- Cerchecci, M.; Luti, F.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A low power IoT sensor node architecture for waste management within smart cities context. Sensors 2018, 18, 1282. [Google Scholar] [CrossRef] [PubMed]
- Pavon-Marino, P.; Izquierdo-Zaragoza, J.-L. Net2Plan: An open source network planning tool for bridging the gap between academia and industry. IEEE Netw. 2015, 29, 90–96. [Google Scholar] [CrossRef]
- Net2Plan. The Open-Source Network Planner. Available online: http://www.net2plan.com (accessed on 26 April 2019).
- Java Optimization Modeler. Available online: http://www.net2plan.com/jom/ (accessed on 26 April 2019).
- Romero-Gázquez, J.L.; Bueno-Delgado, M.V.; Moreno-Muro, F.J.; Pavon-Marino, P. Net2Plan-GIS: An open-source Net2Plan extension integrating GIS data for 5G network planning. In Proceedings of the 20th International Conference on Transparent Optical Networks, Bucharest, Romania, 1–5 July 2018. [Google Scholar]
- Net2Plan WasteCollection Github repository. Available online: https://github.com/girtel/Net2Plan-GisLibrary/blob/WasteCollection/src/main/java/com/net2plan/gis/algorithms/ (accessed on 26 April 2019).
- Net2Plan Github repository. Available online: https://github.com/girtel/Net2Plan (accessed on 26 April 2019).
- Net2Plan GisLibrary Github repository. Available online: https://github.com/girtel/Net2Plan-GisLibrary (accessed on 26 April 2019).
- Dantzig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Kulcar, T. Optimizing solid waste collection in Brussels. Eur. J. Oper. Res. 1996, 94, 71–77. [Google Scholar] [CrossRef]
- Agha, S.R. Optimizing routing of municipal solid waste collection vehicles in Deir el-Balah–Gaza strip. IUG J. Nat. Stud. 2006, 14, 75–89, ISSN 1726-6807. [Google Scholar]
- Faccio, M.; Persona, A.; Zanin, G. Waste collection multi objective model with real time traceability data. Waste Manag. 2011, 31, 2391–2405. [Google Scholar] [CrossRef] [PubMed]
- Islam, R.; Rahman, M.S. An ant colony optimization algorithm for waste collection vehicle routing with time window, driver rest period and multiple disposal facilities. In Proceedings of the IEEE/OSA/IAPR International Conference on Informatics, Electronics and Vision, Dhaka, Bangladesh, 18–19 May 2012; pp. 774–779. [Google Scholar]
- Karadimas, N.V.; Papatzelou, K.; Loumos, V.G. Genetic Algorithms for Municipal Solid Waste Collection and Routing Optimization. In Artificial Intelligence and Innovations 2007: From Theory to Applications; AIAI 2007. IFIP International Federation for Information Processing, Springer: Boston, MA, USA; Volume 247.
- Son, L.H. Optimizing municipal solid waste collection using chaotic particle swarm optimization in GIS based environments: A case study at Danang City, Vietnam. Exp. Syst. Appl. 2014, 41, 8062–8074. [Google Scholar] [CrossRef]
- Gómez, J.R.; Pacheco, J.; Gonzalo-Orden, H. A tabu search method for a bi-objective urban waste collection problem. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 36–53. [Google Scholar] [CrossRef]
- Bing, X.; Bloemhof, J.M.; Ramos, T.R.P.; Barbosa-Povoa, A.P.; Wong, C.Y.; van der Vorst, J.G. Research challenges in municipal solid waste logistics management. Waste Manag. 2016, 48, 584–592. [Google Scholar] [CrossRef] [PubMed]
- Akhtar, M.; Hannan, M.A.; Begum, R.A.; Basri, H.; Scavino, E. Backtracking search algorithm in CVRP models for efficient solid waste collection and route optimization. Waste Manag. 2017, 61, 117–128. [Google Scholar] [CrossRef] [PubMed]
- Hannan, M.A.; Akhtar, M.; Begum, R.A.; Basri, H.; Hussain, A.; Scavino, E. Capacitated vehicle-routing problem model for scheduled solid waste collection and route optimization using PSO algorithm. Waste Manag. 2018, 71, 31–41. [Google Scholar] [CrossRef] [PubMed]
- Pavón-Mariño, P. Optimization of Computer Networks: Modeling and Algorithms: A Hands-on Approach; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Jiménez-Gómez, P.; Bueno-Delgado, M.V.; Pavón-Mariño, P. Net2Plan-UTN: An educational tool for modeling and planning urban transportation networks. In Proceedings of the 8th Annual International Conference on Education and New Learning Technologies, Barcelona, Spain, 4–6 July 2016. [Google Scholar]
- QGIS. Open Source GIS Tool. Available online: https://www.qgis.org (accessed on 26 April 2019).
- IVECO-. Available online: http://www.iveco.org/download/IVECO/IVECO%20EURO%202-3/STRALIS/STRALIS_AS/ad260s31yps.pdf (accessed on 26 April 2019).
- Alproshop. Plastic Waste Container. Available online: https://alproshop.com/metalico-2600-de-gran-capacidad/ (accessed on 26 April 2019).
- Smart Device 32U4 WITH MODULE7 GPRS/GSM/GPS. Available online: https://www.elecrow.com/wiki/index.php?title=32u4_with_A7_GPRS/GSM (accessed on 26 April 2019).
- Lin, T.P. Carbon dioxide emissions from transport in Taiwan’s national parks. Tour. Manag. 2010, 31, 285–290. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Algorithm | Goal | Smart Bins | GIS | Street (≥1) | #Trucks as Output |
|---|---|---|---|---|---|---|
| [9] | Different heuristics and local search method | Minimize Distance | x | X | ||
| [20] | MILP | Minimize Distance | x | x | x | X |
| [21] | Heuristic: Nearest Neighborhood | Minimize Distance | x | |||
| [22] | Meta-heuristic: AnColony Optimization | Minimize Distance | x | x | x | |
| [23] | Meta-heurtic: Genetic algorithm | Minimize Distance | x | x | X | |
| [24] | Meta-heuristic: Chaotic Particle Swarm Optimization | Maximize total waste collected | x | x | ||
| [25] | Meta-heuristic: Tabu search | Minimize transport cost + maximize service quality | x | x | x | X |
| [27] | Meta-heuristic: Backtracking Search Algorithm | Minimize Distance | √ | x | x | |
| [28] | Meta-heuristic: Particle Swarm Optimization | Minimize Distanc | x | x | ||
| *** | ILP | Minimize Distance + Truck/s cost |
| Type | CO | HC | NOx | PM |
|---|---|---|---|---|
| Euro VI | 1.5 | 0.13 | 0.4 | 0.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bueno-Delgado, M.-V.; Romero-Gázquez, J.-L.; Jiménez, P.; Pavón-Mariño, P. Optimal Path Planning for Selective Waste Collection in Smart Cities. Sensors 2019, 19, 1973. https://doi.org/10.3390/s19091973
Bueno-Delgado M-V, Romero-Gázquez J-L, Jiménez P, Pavón-Mariño P. Optimal Path Planning for Selective Waste Collection in Smart Cities. Sensors. 2019; 19(9):1973. https://doi.org/10.3390/s19091973
Chicago/Turabian StyleBueno-Delgado, María-Victoria, José-Luis Romero-Gázquez, Pilar Jiménez, and Pablo Pavón-Mariño. 2019. "Optimal Path Planning for Selective Waste Collection in Smart Cities" Sensors 19, no. 9: 1973. https://doi.org/10.3390/s19091973
APA StyleBueno-Delgado, M.-V., Romero-Gázquez, J.-L., Jiménez, P., & Pavón-Mariño, P. (2019). Optimal Path Planning for Selective Waste Collection in Smart Cities. Sensors, 19(9), 1973. https://doi.org/10.3390/s19091973