A Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Mathematical Model of EIT and UT
2.1. EIT Mathematical Model
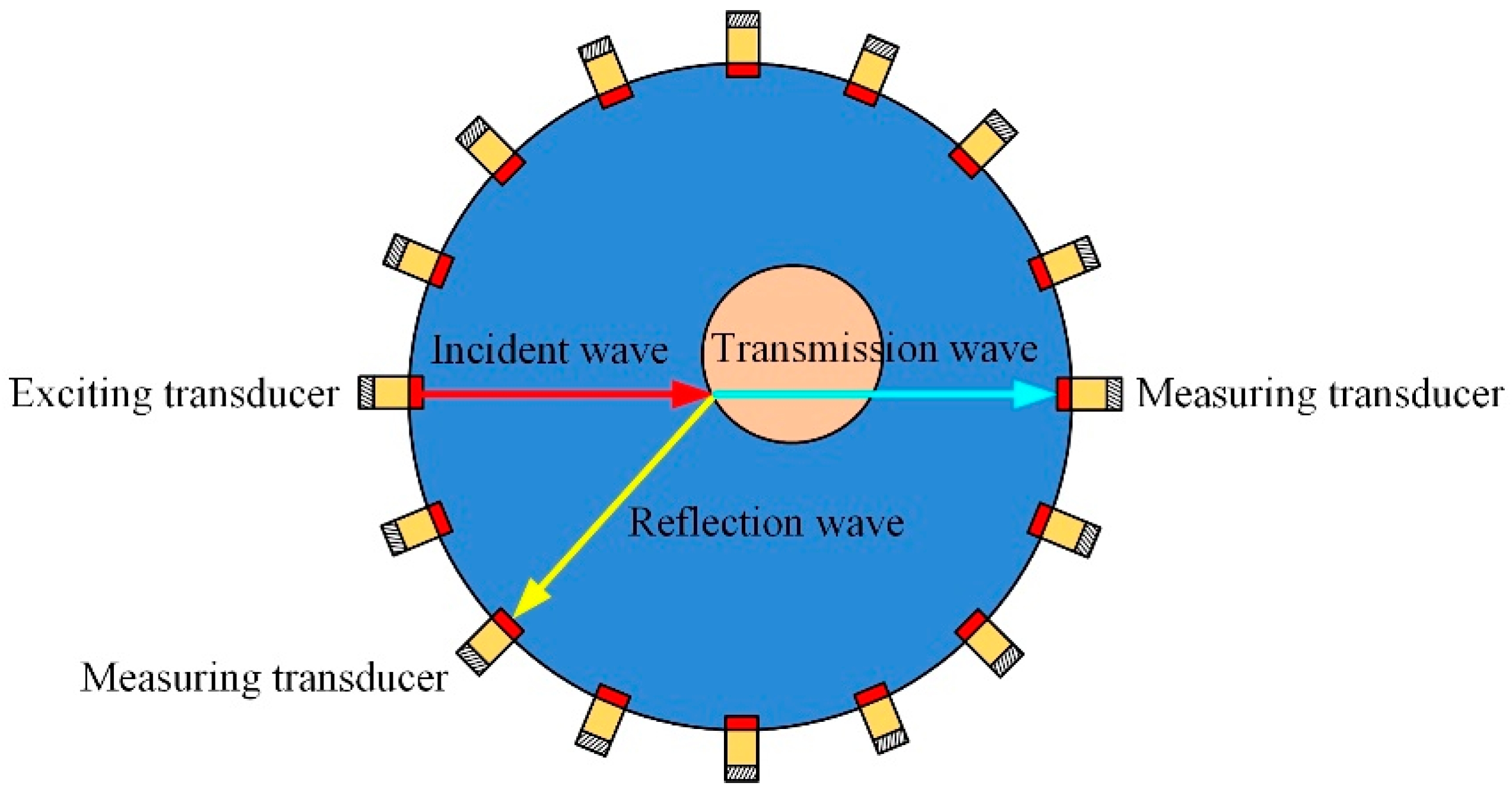
2.2. UT Mathematical Model
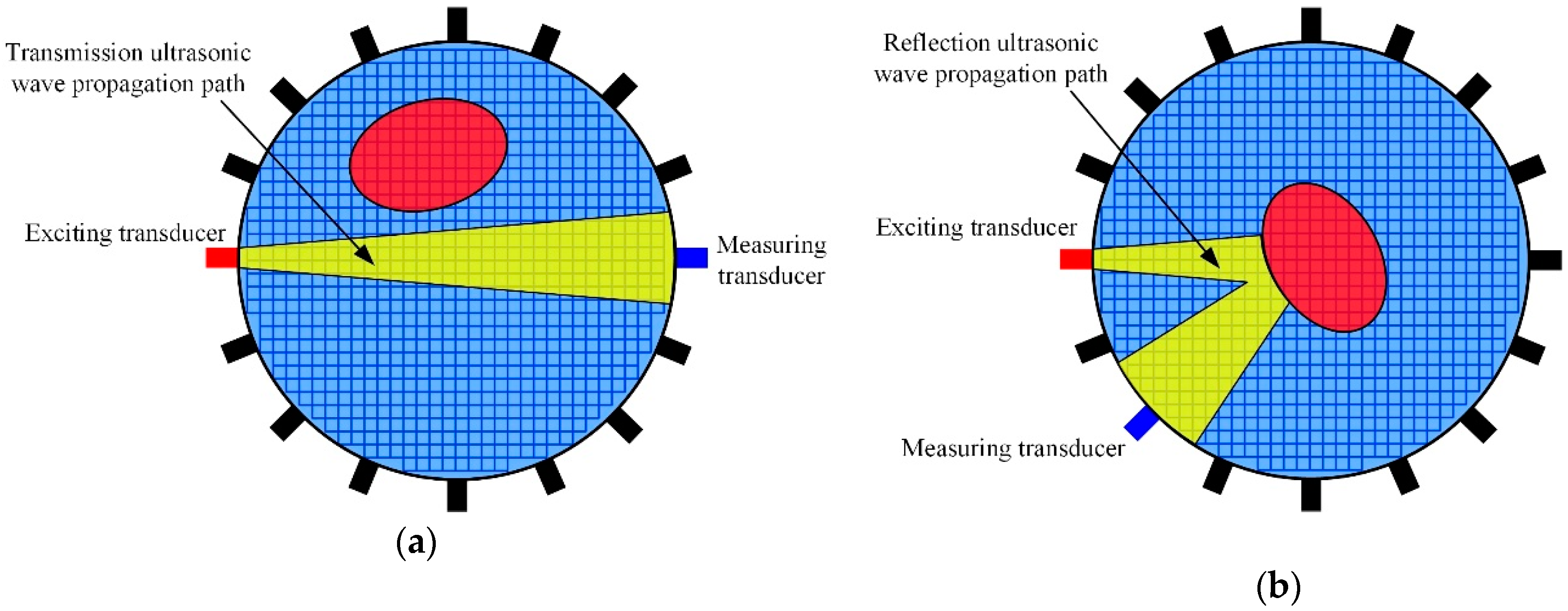
2.2.1. Transmission Mode Mathematical Model
2.2.2. Reflection Mode Mathematical Model
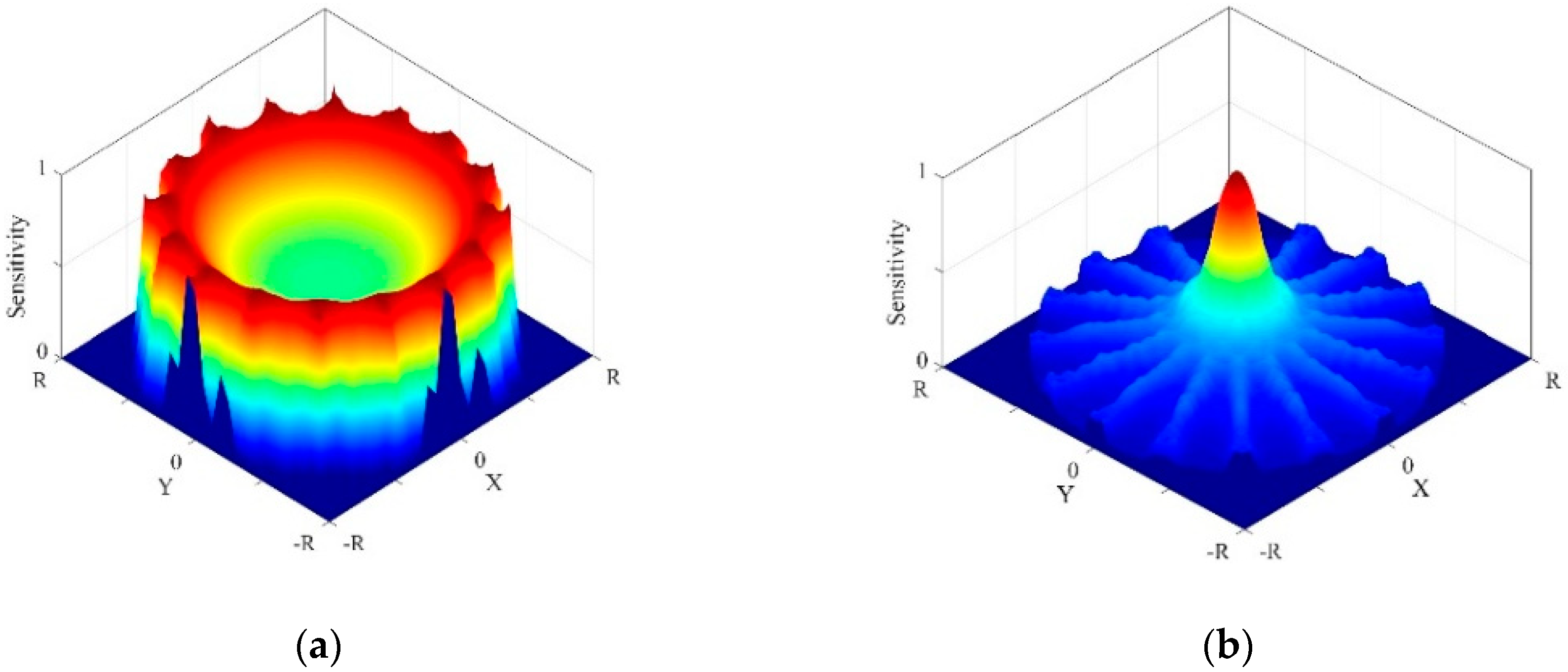
2.3. Complementarity of EIT and URT Sensitive Field
3. EIT/UT Dual-Modality Image Reconstruction
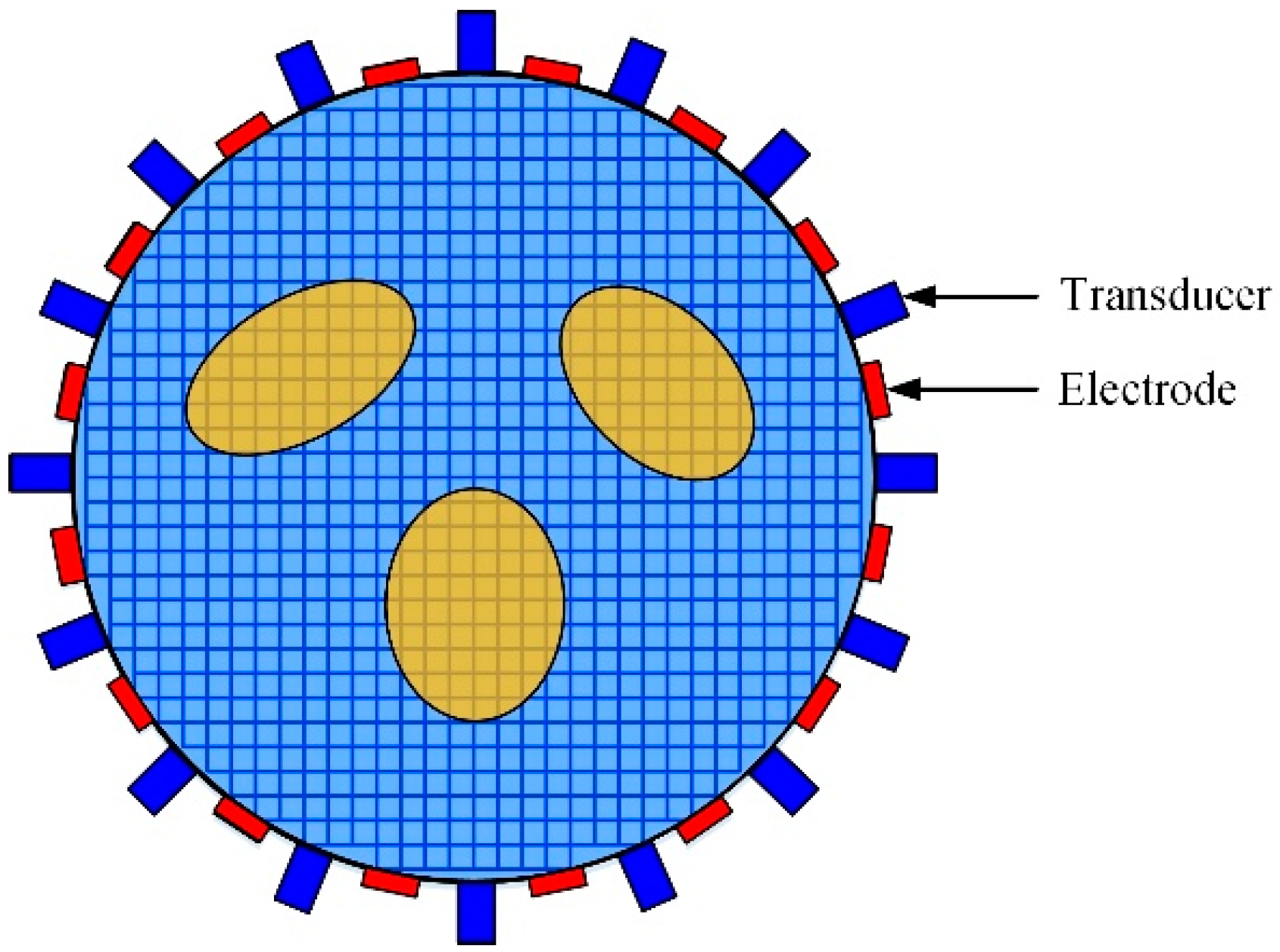
3.1. Unification of Mesh Model and Reconstruction Target
3.2. Total Variation Regularization for EIT
3.3. Constraints Information from UT Measurements
3.4. Lagrange-Newton Solution for Dual-Modality Inverse Problem
| Algorithm 1: Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction |
| Step 1: Initialization. Calculate the initial value of x using linear back-projection (LBP) algorithm [13]: , Given the value of the iteration termination parameter: , Given the value of the intermediate parameter in iteration: . Step 2: Termination Condition Judgment. Calculate by Equation (27), and judge: If , stop iteration and return the as the optimal estimation value, Otherwise, calculate and by the Equation (24). Step 3: Compute Step Length. Calculate and by Equation (27), and judge: If , go to Step 4, Otherwise, set , continue to the Step 3. Step 4: Iteration Update. Update the conductivity difference x: , Update the Lagrange multiplier λ: , Set k=k+1 and go to Step 2. |
4. Results
4.1. Numerical Results and Discussion
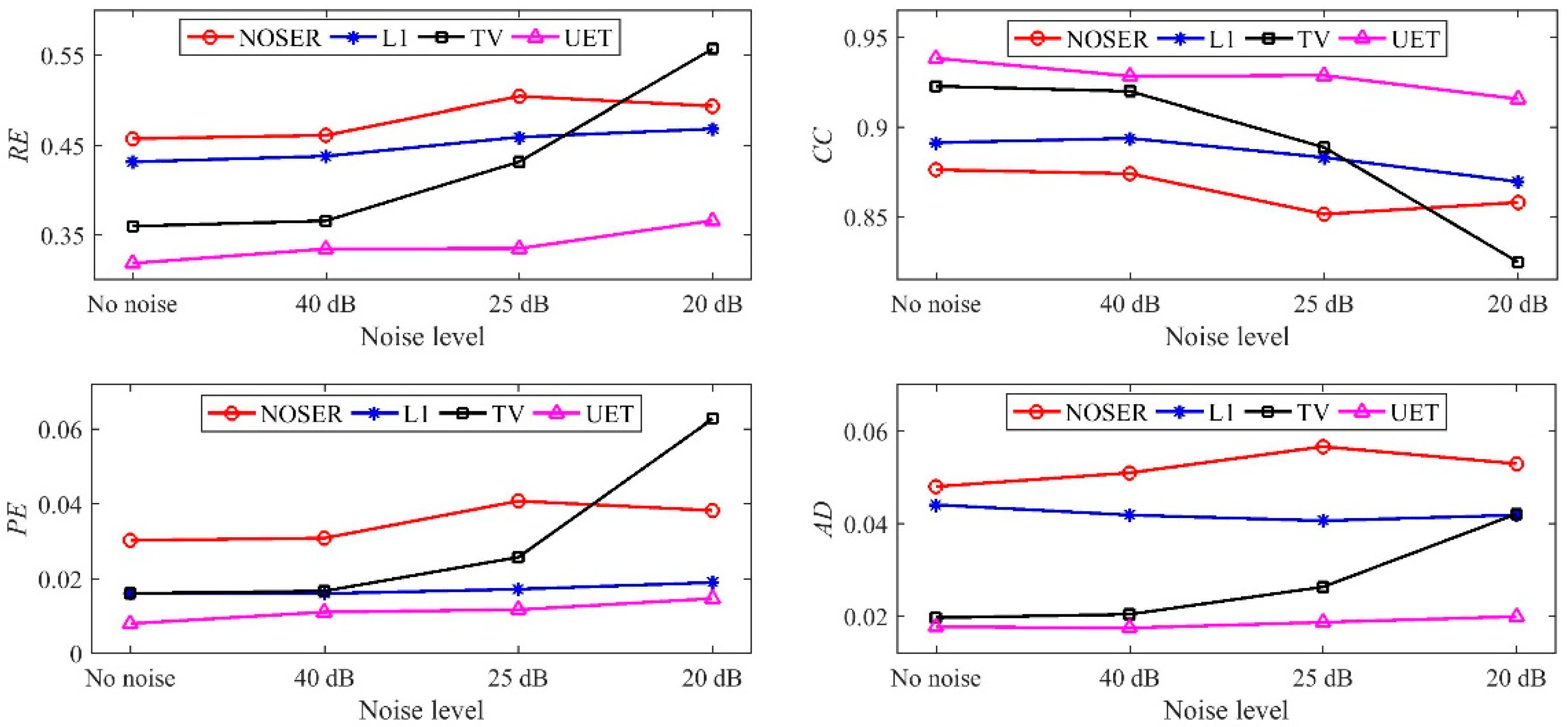
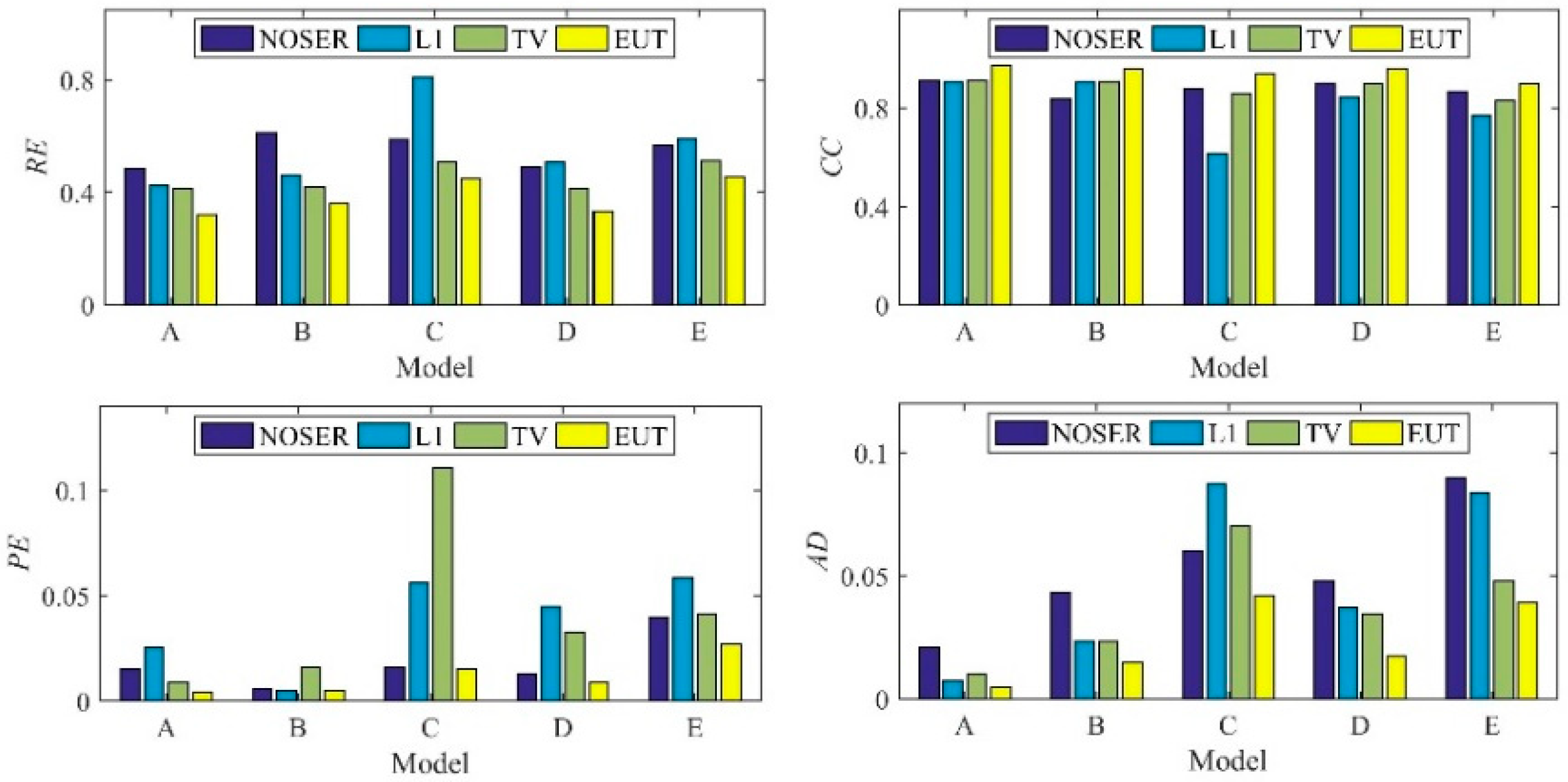
4.1.1. Quantitative Index
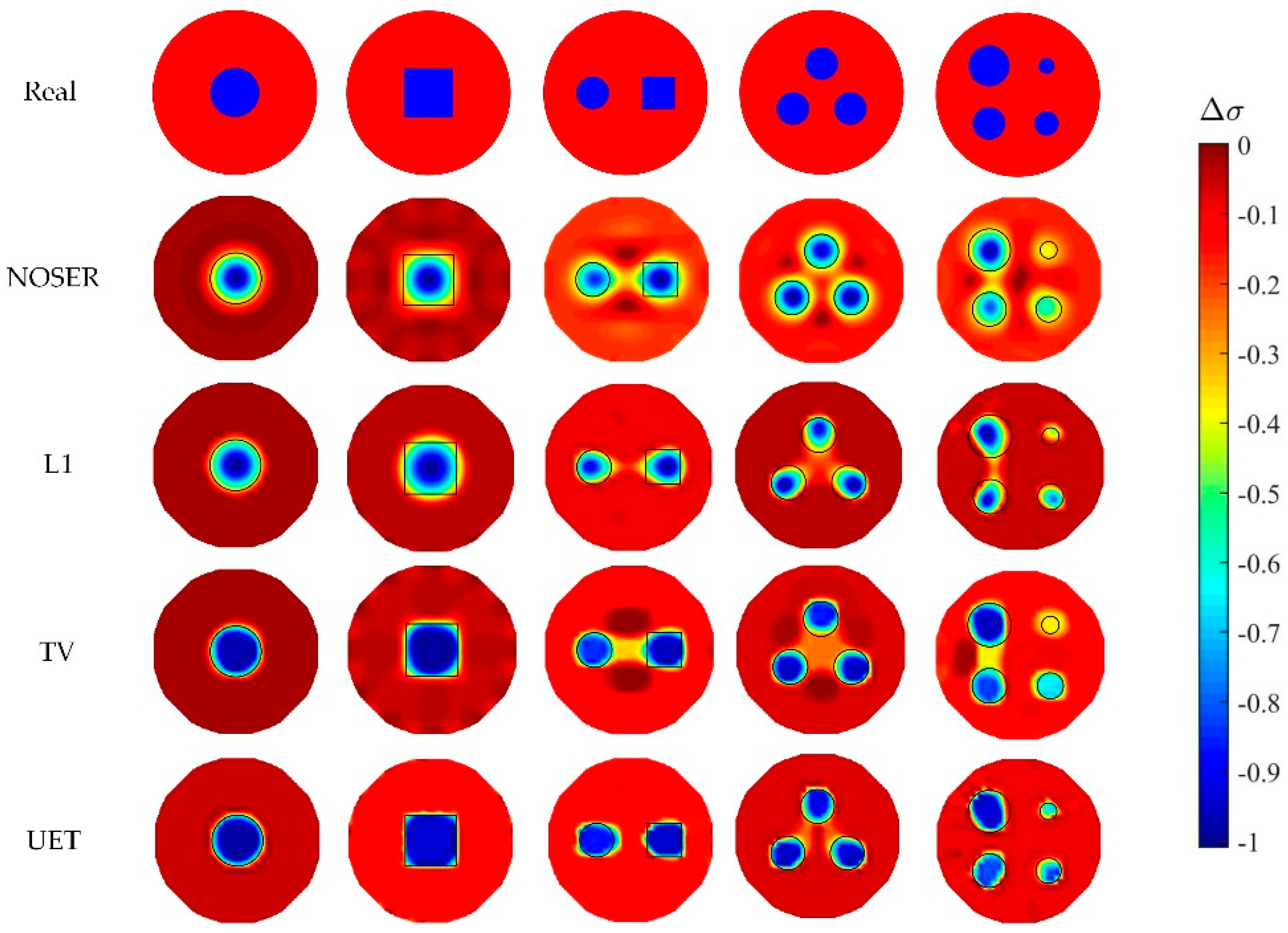
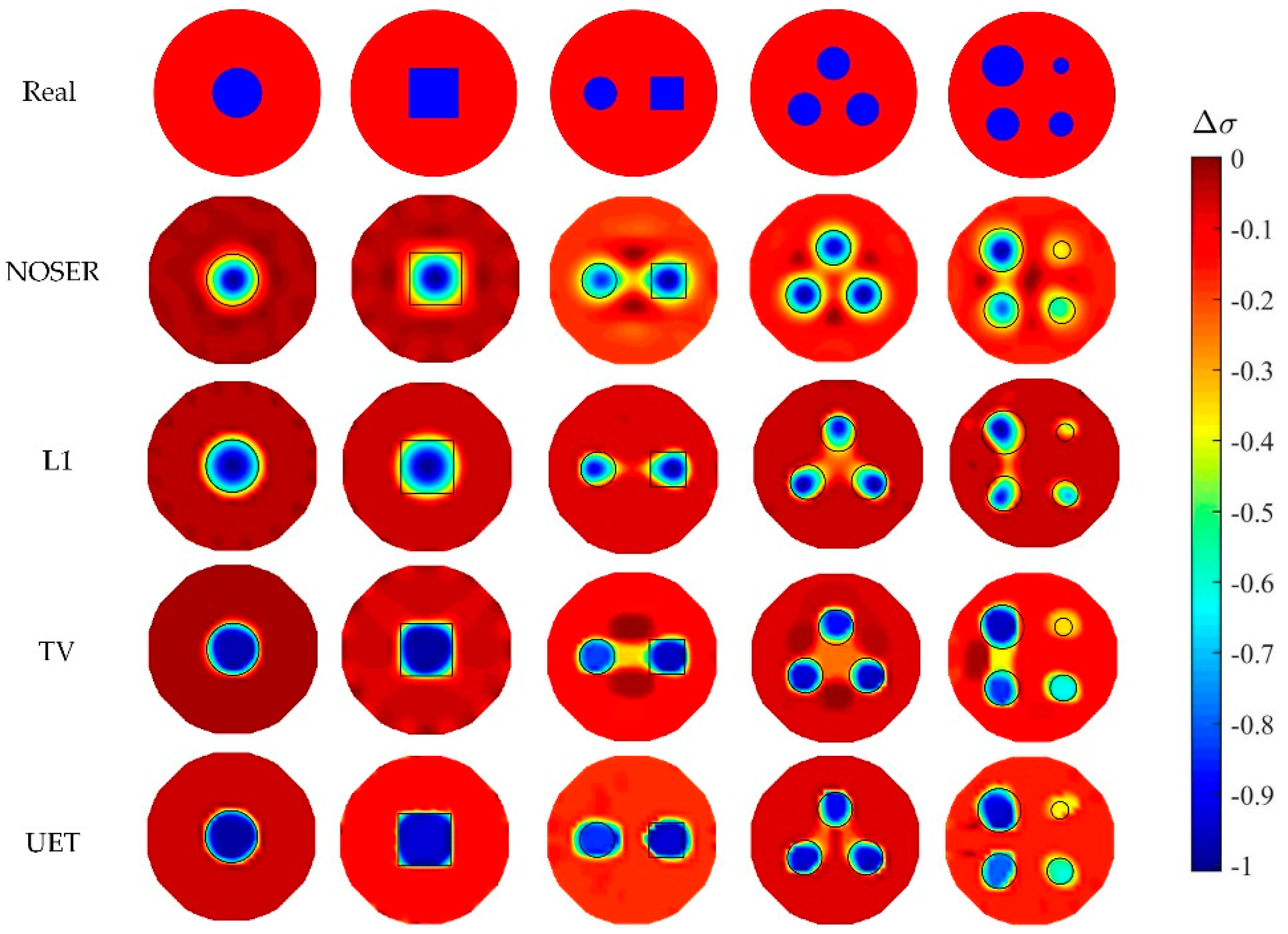
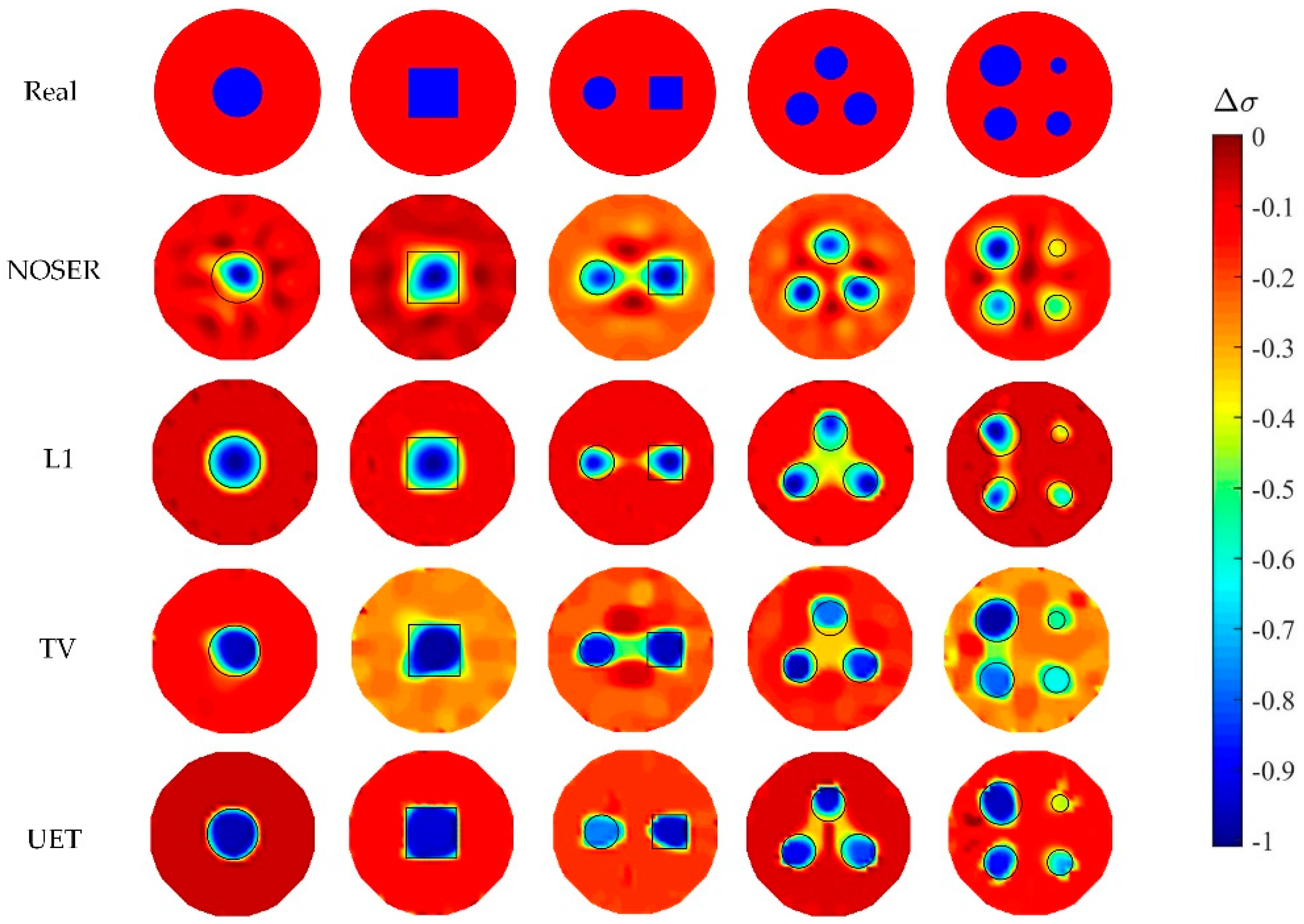
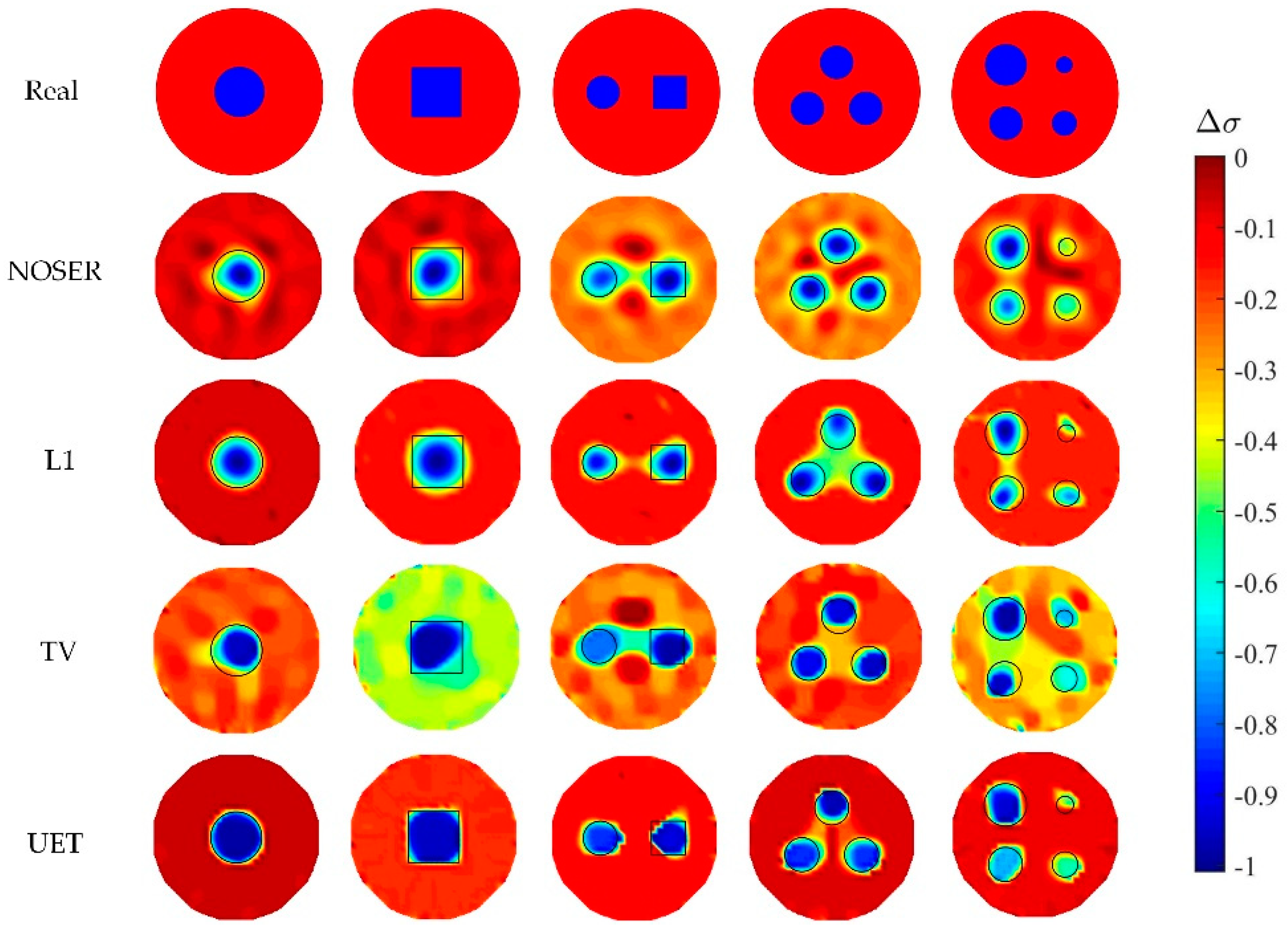
4.1.2. Image Reconstruction Results Analysis
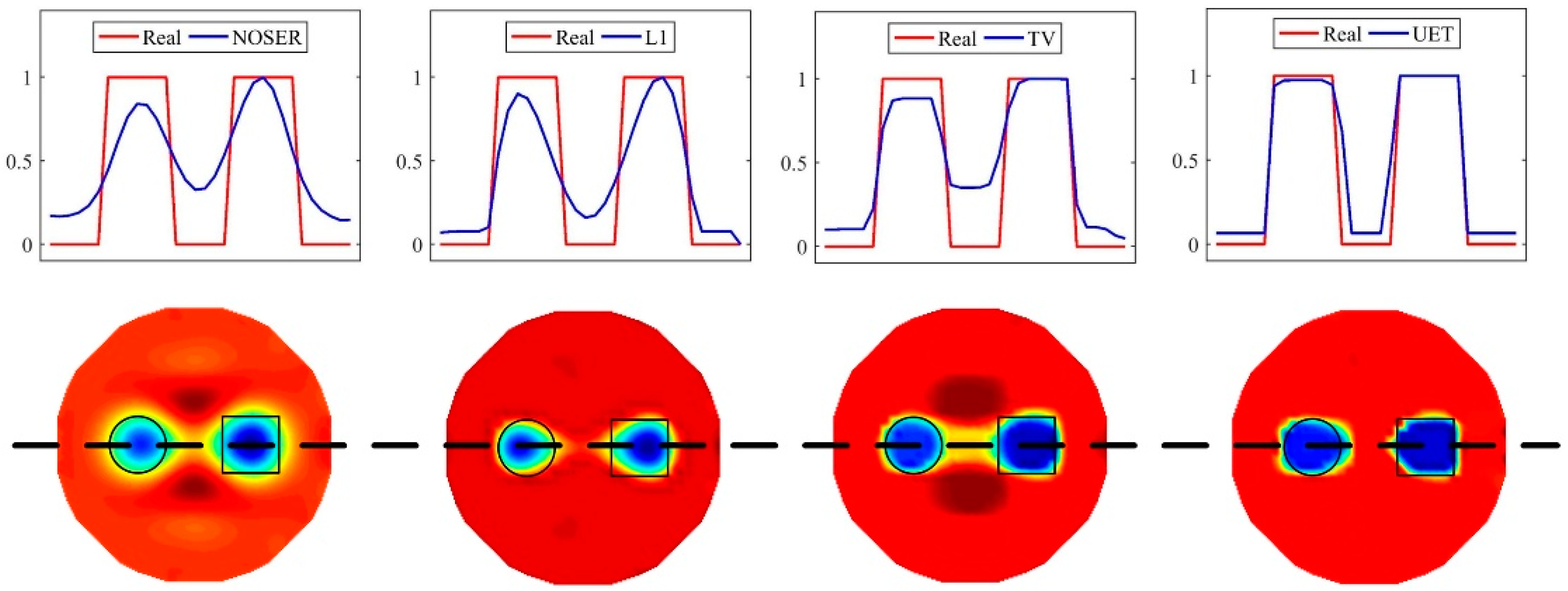
4.1.3. Comparison of Edge Reconstruction Ability
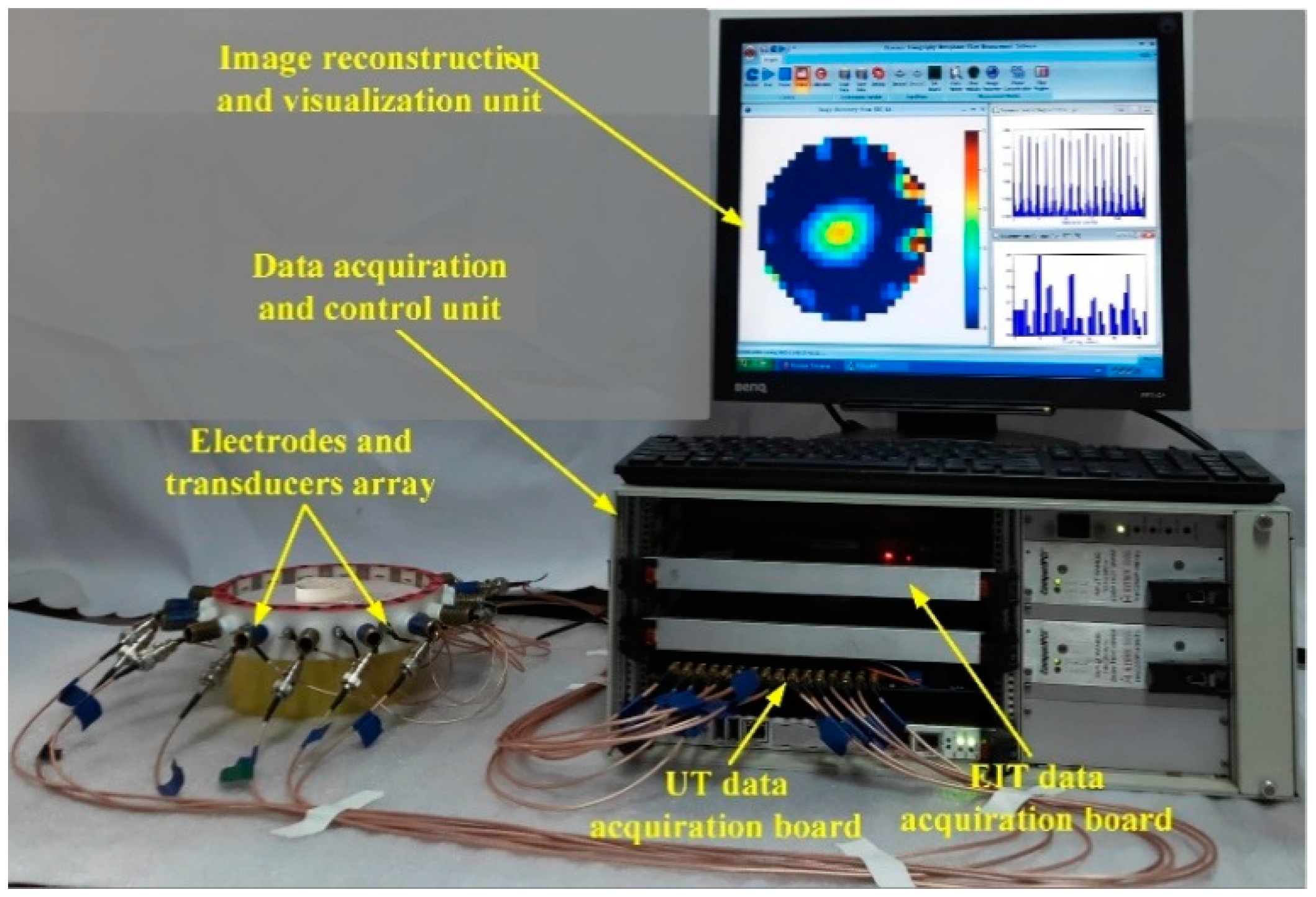
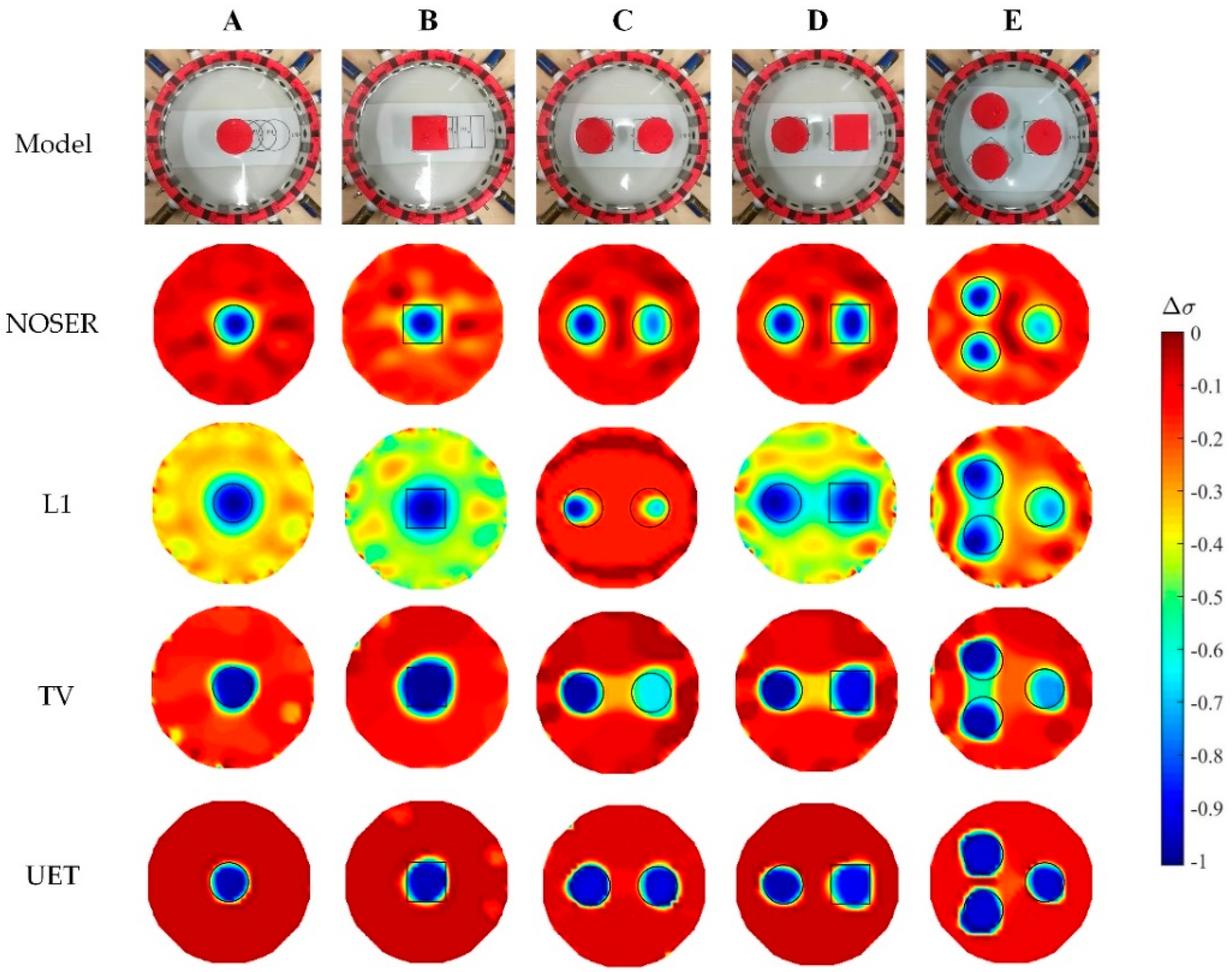
4.2. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dong, F.; Jiang, Z.X.; Qiao, X.T.; Xu, L.A. Application of electrical resistance tomography to two-phase pipe flow parameters measurement. Flow Meas. Instrum. 2003, 14, 183–192. [Google Scholar] [CrossRef]
- Yao, J.F.; Takei, M. Application of process tomography to multiphase flow measurement in industrial and biomedical fields—A review. IEEE Sens. J. 2017, 17, 8196–8205. [Google Scholar] [CrossRef]
- Liu, D.; Khambampati, A.K.; Du, J.F. A parametric level set method for electrical impedance tomography. IEEE Trans. Med. Imaging 2018, 37, 451–460. [Google Scholar] [CrossRef]
- Nissinen, A.; Kaipio, J.P.; Vauhkonen, M.; Kolehmainen, V. Contrast enhancement in EIT imaging of the brain. Physiol. Meas. 2015, 37, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Storz, H.; Storz, W.; Jacobs, F. Electrical resistivity tomography to investigate geological structures of the earth’s upper crust. Geophys. Prospect. 2000, 48, 455–471. [Google Scholar] [CrossRef]
- Loke, M.H.; Chambers, J.E.; Rucker, D.F.; Kuras, O.; Wilkinson, P.B. Recent developments in the direct-current geoelectrical imaging method. J. Appl. Geophys. 2013, 95, 135–156. [Google Scholar] [CrossRef]
- Tallman, T.N.; Gungor, S.; Wang, K.W.; Bakis, C.E. Damage detection and conductivity evolution in carbon nanofiber epoxy via electrical impedance tomography. Smart Mater. Struct. 2014, 23, 045034. [Google Scholar] [CrossRef]
- Tallman, T.N.; Semperlotti, F.; Wang, K.W. Enhanced delamination detection in multifunctional composites through nanofiller tailoring. J. Intell. Mater. Syst. Struct. 2015, 26, 2565–2576. [Google Scholar] [CrossRef]
- Hallaji, M.; Seppänen, A.; Pour-Ghaz, M. Electrical resistance tomography to monitor unsaturated moisture flow in cementitious materials. Cem. Concr. Res. 2015, 69, 10–18. [Google Scholar] [CrossRef]
- Hallaji, M.; Seppänen, A.; Pour-Ghaz, M. Electrical impedance tomography-based sensing skin for quantitative imaging of damage in concrete. Smart Mater. Struct. 2014, 23, 085001. [Google Scholar] [CrossRef]
- Holder, D.S. Electrical Impedance Tomography: Methods, History and Applications; Institute of Physics Publishing: London, UK, 2005. [Google Scholar]
- Murphy, E.K.; Mahara, A.; Halter, R.J. Absolute reconstructions using rotational electrical impedance tomography for breast cancer imaging. IEEE Trans. Med. Imaging 2017, 36, 892–903. [Google Scholar] [CrossRef]
- Barber, D.C.; Brown, B.H. Applied potential tomography. J. Phys E Sci. Instrum. 1984, 17, 723. [Google Scholar] [CrossRef]
- Vauhkonen, M.; Vadasz, D.; Karjalainen, P.A.; Somersalo, E.; Kaipio, J.P. Tikhonov regularization and prior information in electrical impedance tomography. IEEE Trans. Med. Imaging 1998, 17, 285–293. [Google Scholar] [CrossRef]
- Liu, D.; Kolehmainen, M.; Siltanen, S.; Laukkanen, A.M.; Seppanen, A. Estimation of conductivity changes in a region of interest with electrical impedance tomography. Inverse Probl. Imag. 20l5, 9, 211–229. [Google Scholar] [CrossRef]
- Chen, B.; Abascal, J.; Soleimani, M. Electrical resistance tomography for visualization of moving objects using a spatiotemporal total variation regularization algorithm. Sensors 2018, 18, 1704. [Google Scholar] [CrossRef]
- Liu, S.H.; Jia, J.B.; Zhang, Y.D.; Yang, Y.J. Image reconstruction in electrical impedance tomography based on structure-aware sparse bayesian learning. IEEE Trans. Med. Imaging 2018, 37, 2090–2102. [Google Scholar] [CrossRef]
- Ren, S.J.; Sun, K.; Liu, D.; Dong, F. A statistical shape constrained reconstruction framework for electrical impedance tomography. IEEE Trans. Med. Imaging 2019, in press. [Google Scholar] [CrossRef]
- Cherry, S.R. Multimodality imaging: beyond PET/CT and SPECT/CT. Semin. Nucl. Med. 2009, 39, 348–353. [Google Scholar] [CrossRef]
- Veninga, T.; Huisman, H.; Maazen, R.W.; Huizenga, H. Clinical validation of the normalized mutual information method for registration of CT and MR images in radiotherapy of brain tumours. J. Appl. Clin. Med. Phys. 2004, 5, 66–79. [Google Scholar] [CrossRef]
- Kaplan, I.; Oldenburg, N.E.; Meskell, P.; Blake, M.; Church, P.; Holupka, E.J. Real time MRI-ultrasound image guided stereotactic prostate biopsy. Magn. Reson. Imaging 2002, 20, 295–299. [Google Scholar] [CrossRef]
- Steiner, G. Sequential fusion of ultrasound and electrical capacitance tomography. Int. J. Inf. Syst. Sci. 2006, 2, 484–497. [Google Scholar]
- Zhang, R.H.; Wang, Q.; Wang, H.X.; Zhang, M.; Li, H.L. Data fusion in dual-mode tomography for imaging oil–gas two-phase flow. Flow Meas. Instrum. 2014, 37, 1–11. [Google Scholar] [CrossRef]
- Johansen, G.A.; Abro, E. A new CdZnTe detector system for low-energy gamma-ray measurement. Sens. Actuators A Phys. 1996, 54, 493–498. [Google Scholar] [CrossRef]
- Liu, S.; Liu, S.; Ren, T. Acoustic tomography reconstruction method for the temperature distribution measurement. IEEE Trans. Instrum. Meas. 2017, 66, 1936–1945. [Google Scholar] [CrossRef]
- Duric, N.; Boyd, N.; Littrup, P.; Sak, M.; Myc, L.; Li, C.; West, E.; Minkin, S.; Martin, L.; Yaffe, M.; et al. Breast density measurements with ultrasound tomography: A comparison with film and digital mammography. Med. Phys. 2013, 40, 013501. [Google Scholar] [CrossRef]
- Langener, S.; Vogt, M.; Ermert, H.; Musch, T. A real-time ultrasound process tomography system using a reflection-mode reconstruction technique. Flow Meas. Instrum. 2017, 53, 107–115. [Google Scholar] [CrossRef]
- Liang, G.H.; Ren, S.J.; Dong, F. An inclusion boundary reconstruction method using electrical impedance and ultrasound reflection dual-modality tomography. In Proceedings of the 9th World Congress on Industrial Process Tomography (WCIPT), Bath, UK, 2–6 September 2018. [Google Scholar]
- Liang, G.H.; Ren, S.J.; Dong, F. Ultrasound guided electrical impedance tomography for 2D free-interface reconstruction. Meas. Sci. Technol. 2017, 28, 074003. [Google Scholar] [CrossRef]
- Steiner, G.; Soleimani, M.; Watzenig, D. A bio-electromechanical imaging technique with combined electrical impedance and ultrasound tomography. Physiol. Meas. 2008, 29, 63–75. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Halter, R.; Borsic, A.; Manwaring, P.; Hartov, A.; Paulsen, K. Sensitivity study of an ultrasound coupled transrectal electrical Impedance Tomography system for prostate imaging. Physiol. Meas. 2010, 31, 17–29. [Google Scholar] [CrossRef] [PubMed]
- Teniou, S.; Meribout, M. A multimodal image reconstruction method using ultrasonic waves and electrical resistance tomography. IEEE Trans. Image Process. 2015, 24, 3512–3521. [Google Scholar] [CrossRef] [PubMed]
- Pusppanathan, J.; Rahim, R.A.; Phang, F.A.; Mohamad, E.J.; Seong, C.K. Single-plane dual-modality tomography for multiphase flow imaging by integrating electrical capacitance and ultrasonic sensors. IEEE Sens. J. 2017, 17, 6368–6377. [Google Scholar] [CrossRef]
- Liang, G.H.; Ren, S.J.; Dong, F. An augmented Lagrangian trust region method for inclusion boundary reconstruction using ultrasound/electrical dual-modality tomography. Meas. Sci. Technol. 2018, 29, 074008. [Google Scholar] [CrossRef]
- Hassan, H.; Semperlotti, F.; Wang, K.W.; Tallman, T.N. Enhanced imaging of piezoresistive nanocomposites through the incorporation of nonlocal conductivity changes in electrical impedance tomography. J. Intell. Mater. Syst. Struct. 2018, 29, 1850–1861. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Wang, K.W.; Semperlotti, F. An application of impediography to the high sensitivity and high resolution identification of structural damage. Smart Mater. Struct. 2015, 24, 065044. [Google Scholar] [CrossRef]
- Ammari, H.; Bonnetier, E.; Capdeboscq, Y.; Tanter, M.; Fink, M. Electrical impedance tomography by elastic deformation. SIAM J. Appl. Math. 2008, 68, 1557–1573. [Google Scholar] [CrossRef]
- Somersalo, E.; Cheney, M.; Isaacson, D. Existence and uniqueness for electrode models for electric current computed tomography. SIAM J. Appl. Math. 1992, 52, 1023–1040. [Google Scholar] [CrossRef]
- Geselowitz, D. An application of electrocardiographic lead theory to impedance plethysmography. IEEE Trans. Biomed. Eng. 1971, 18, 38–41. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.J.; Soleimani, M.; Dong, F. Inclusion boundary reconstruction and sensitivity analysis in electrical impedance tomography. Inverse Probl. Sci. Eng. 2018, 26, 1037–1061. [Google Scholar] [CrossRef]
- Ren, S.J.; Wang, Y.; Liang, G.H.; Dong, F. A robust inclusion boundary reconstructor for electrical impedance tomography with geometric constraints. IEEE Trans. Instrum. Meas. 2019, 68, 762–773. [Google Scholar] [CrossRef]
- Li, N.; Cao, M.C.; Xu, K.; Jia, J.B.; Du, H.B. Ultrasonic transmission tomography sensor design for bubble identification in gas-liquid bubble column reactors. Sensors 2018, 18, 4256. [Google Scholar] [CrossRef] [PubMed]
- Brandstatter, B. Jacobian calculation for electrical impedance tomography based on the reciprocity principle. IEEE Trans. Magn. 2003, 39, 1309–1312. [Google Scholar] [CrossRef]
- Rahiman, M.H.F.; Rahim, R.A.; Rahim, H.A.; Zakaria, Z.; Pusppanathan, J. A study on forward and inverse problems for an ultrasonic tomography. J. Teknol. 2014, 70, 113–117. [Google Scholar] [CrossRef]
- Song, X.Z.; Xu, Y.B.; Dong, F. A spatially adaptive total variation regularization method for electrical resistance tomography. Meas. Sci. Technol. 2015, 26, 125401. [Google Scholar] [CrossRef]
- Dong, F.; Xu, C.; Zhang, Z.Q.; Ren, S.J. Design of parallel electrical resistance tomography system for measuring multiphase flow. Chin. J. Chem. Eng. 2012, 20, 368–379. [Google Scholar] [CrossRef]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, G.; Ren, S.; Zhao, S.; Dong, F. A Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction. Sensors 2019, 19, 1966. https://doi.org/10.3390/s19091966
Liang G, Ren S, Zhao S, Dong F. A Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction. Sensors. 2019; 19(9):1966. https://doi.org/10.3390/s19091966
Chicago/Turabian StyleLiang, Guanghui, Shangjie Ren, Shu Zhao, and Feng Dong. 2019. "A Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction" Sensors 19, no. 9: 1966. https://doi.org/10.3390/s19091966
APA StyleLiang, G., Ren, S., Zhao, S., & Dong, F. (2019). A Lagrange-Newton Method for EIT/UT Dual-Modality Image Reconstruction. Sensors, 19(9), 1966. https://doi.org/10.3390/s19091966