1. Introduction
Forests play a very important role in the balance of the terrestrial carbon cycle [
1,
2]. They are, in general, net carbon sinks because the absorption of atmospheric CO
2 is greater than that which is returned to the atmosphere through processes such as plant respiration and plant decomposition through bacteria, fungi and so on, thus making forest conservation of critical importance for mitigating climate change [
3]. In this way, slowing deforestation, combined with an increase in forestation and other management measures to improve forest ecosystem productivity, could conserve or sequester significant quantities of carbon [
4], thus fostering negative emissions and contributing to meet the Paris agreement aspiration of limiting global temperature rises to below 2 °C [
5]. This sequestration of atmospheric carbon by forests also becomes a major strategy for the United Nations Framework Convention on Climate Change within the context of Reducing Emissions from Deforestation and forest Degradation (REDD), which could help mitigate greenhouse gas emissions on forest-rich developing countries [
6], as is the case of Ecuador.
The economic and environmental relevance of natural and planted teak forests (
Tectona grandis Linn. F.) is widely recognized. In 2010 the global area of planted teak forests reported from 38 countries was estimated at 4.35 million ha, which 83% grew in Asia, 11% in Africa, 6% in tropical America and less than 1% in Oceania [
7], although taking into account the data missing from 22 teak growing countries, these figures could underestimate the actual planted teak forests in the world. Also according to this data, planted teak forests in Ecuador were around 45,000 ha in 2010, being this exotic species introduced more than 50 years ago in the province of Los Ríos, where it adapted and grew, becoming the main source of seeds for establishing commercial plantations [
8]. In 2013, the Ecuadorian Ministry of Agriculture, Livestock, Aquaculture and Fisheries (MAGAP) recommended the establishment of pure teak plantations in coastal and Amazonian Ecuador within a governmental program of incentives for reforestation with commercial purposes, establishing a goal of 120000 ha of new planted teak forests in five years. However, progress in the suggested goals expressed as reforested area has been modest [
8], although it is difficult to find reliable figures about the dynamic of new teak plantations due to a sub-registration and lack of updated inventories.
To help cope with the mentioned needs of efficient forests inventorying and monitoring, recent development in both active and passive remote sensing sensors has brought new types of spatial information and enhanced capacities to gain insight into emerging applications and methods especially suitable to be applied in the so-called Enhanced Forest Inventory (EFI). This approach to forest inventory makes use of advanced remote sensing technologies such as terrestrial laser scanning (TLS), airborne laser scanning (LiDAR; light detection and ranging) and digital aerial stereo-photogrammetry (DAP) based methods, in combination with ground plot data, to generate inventory attribute information [
9]. In this sense, remote sensing is revolutionizing the way in which forests studies are conducted, and recent technological advances are providing new methods to measure aboveground biomass related variables from spaceborne, airborne and terrestrial sensors. However, to make full use of these emerging technologies for implementing forests inventories and quantifying forest carbon stocks, a new generation of allometric tools, based on individual tree measures that can be collected from spaceborne and airborne sensors (e.g., tree height and crown size), are needed [
10]. In this regards, the recently emergence of computer vision based algorithms such as Structure from Motion (SfM) with Multi-View Stereo (MVS) [
11] has boosted efficiency in collecting and processing geospatial information, yielding, under certain conditions, very dense and accurate 3D point clouds of comparable quality to existing laser-based methods [
12,
13,
14]. This image-based approach [
15] has demonstrated its potential to be successfully used in forest inventories [
16,
17,
18,
19], providing meaningful benefits to retrieve forest canopy structure, including reduced occlusions, high automation, low cost, limited manual editing, and increased geometric accuracy, when coupled with very-high resolution images acquired using Unmanned Aerial Vehicle (UAV) [
20,
21,
22,
23,
24,
25,
26,
27]. These new tools cannot be viewed as a logical progression of existing plot-based measurement, but a completely new way to face forest inventories. For example, TLS should be viewed as a disruptive technology that requires a rethink of vegetation surveys and their application across a wide range of disciplines [
28].
Taking into account that accurate terrain extraction under canopy cover turns out to be crucial since most of the tree parameters involved in forest biomass estimates are related to the distance from the ground (e.g., diameter at breast height (DBH) and tree height) [
29], the main objective of this work aims at developing and testing a SfM-MVS from UAV (UAV-DAP) based workflow to generate high quality Digital Terrain Models (DTMs) on teak plantations situated in the Coastal Region of Ecuador (dry tropical forest). To the best of the authors’ knowledge, this is the first study aimed at monitoring of teak plantations located in dry tropical forests from UAV images.
Considering that some previous studies have demonstrated that DTMs from UAV images under leaf-off conditions achieved similar results to those of LiDAR [
14,
18,
30], the underlying hypothesis that supports this work is based on the use of the alternating leaf-on and leaf-off phenological stages of teak trees associated with the rainy and drought seasons that characterize the climate of the dry tropical forest. In this sense, the leaf-on season would be used to obtain high quality canopy surface models (CSMs) from UAV images, while UAV images taken during the leaf-off season could potentially provide a suitable ground reference (DTM) to later build high quality canopy height models (CHMs) by subtracting the DTM from the CSM. The first-stage goal faced in this work, that is, obtaining accurate DTMs, constitutes a step forward to build the skeleton of an efficient remote sensing method to accurately estimate and update the aboveground biomass dynamic over small sample areas of the teak plantations located in the coastal region of Ecuador (i.e., at project level scale within the context of REDD).
4. Discussion
Because the spatial distribution of canopy heights is usually computed by subtracting a DTM from the elevation of the digital surface model (DSM) of the outer canopy layer, the quality of the canopy height estimates is closely correlated with DTM quality [
51]. In this way, the generation of a high quality DTM is one of the pillars of a UAV-based method for inventorying teak plantations in tropical dry forests such as those located in the coastal region of Ecuador.
However, low DTM completeness is especially common when dealing with remote sensing forestry applications, where data acquisition (e.g., laser beam penetration through canopy in LiDAR surveys) can be limited and so the ground sampling density is consequently reduced [
36]. In the main, LiDAR can penetrate the forest canopy providing scattered ground points to support DTM interpolation, while UAV-DAP is limited to the production of DSMs because imagery only provides measures for the canopy surface as visible from the air [
23,
34,
55]. In this regards, ground elevation error in LiDAR derived DTMs are usually less than 30 cm under forest covers [
56,
57], although it can vary a lot depending on both vegetation structure and density [
57]. In addition, LiDAR surveys are sometimes unaffordable in developing countries [
25], with DAP estimated to be one-third to one-half the cost of LiDAR data for inventorying the same forest area [
9].
Being aware of the limitations of UAV-DAP technology to generate high quality DTMs when the surveyed area presents dense vegetation [
23,
25], we propose in this work to place the date of UAV imagery acquisition at the end of the dry season in the coastal region of Ecuador (i.e., from November to December), that is coinciding with the leaf-off phenological stage of the teak plantations. Acquiring UAV images during leaf-off season can meaningfully diminish ground surface visual occlusions due to canopy, so improving SfM-MVS point matching process and, consequently, the accuracy of UAV-DAP derived DTM [
58]. Complementary UAV field work should be faced at the end of the rainy season (leaf-on) to obtain high quality CHMs given by the difference between CSM (leaf-on capture) and DTM (leaf-off capture). A similar strategy was successfully tested by [
18] working on temperate deciduous forest sites in Maryland (USA). In this case, understory DTMs and CHMs were generated from leaf-on and leaf-off UAV-DAP derived point clouds using procedures commonly applied to LIDAR point clouds. In the same way, Moudrý et al. [
14] reported that a proper combination of leaf-off and leaf-on UAV imagery could have the potential to replace LiDAR data, pointing to leaf-off UAV imagery as a viable alternative for building DTMs. In other very recent work, Moudrý et al. [
30] successfully identified the bare ground during the leaf-off period in a deciduous forest using images from two different fixed-wing UAV systems.
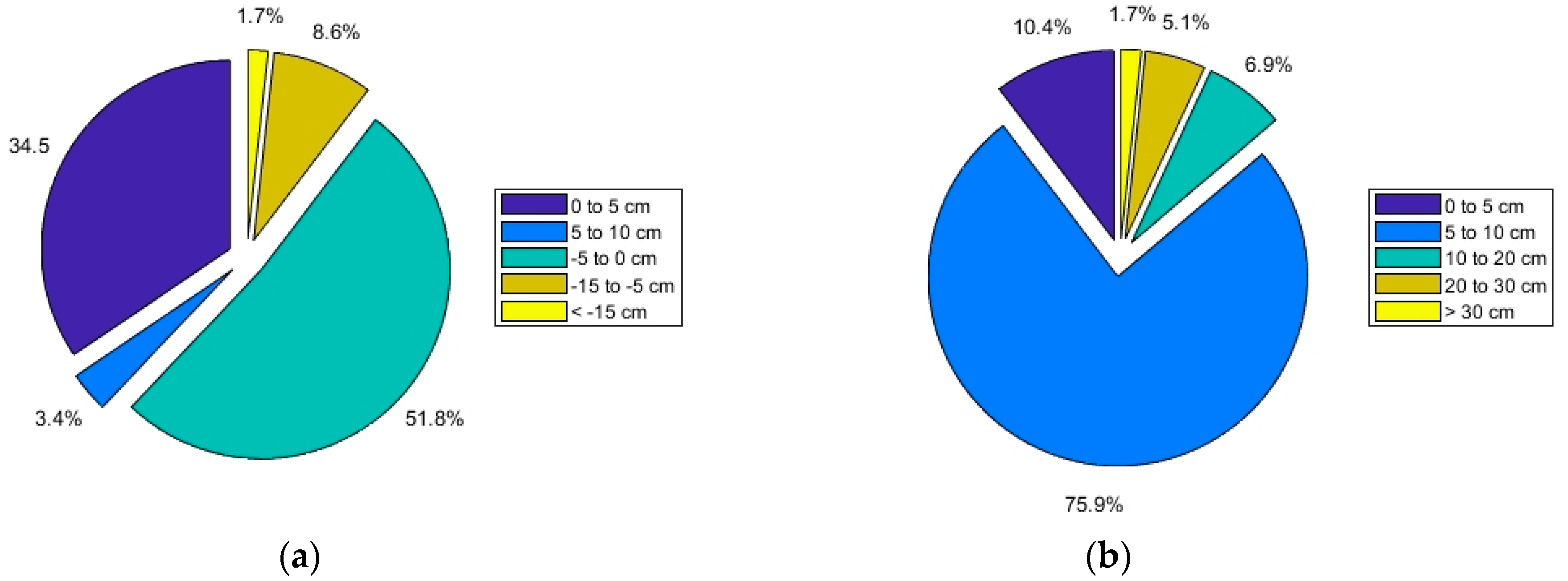
According to this strategy, the results achieved in this preliminary first stage, i.e., UAV imagery capture over teak plantations in leaf-off season, can be considered as very promising, obtaining UAV-DAP DTM average vertical error estimates (in terms of SD) of 11.9 cm, along with an average systematic error close to zero (−3.1 cm) (
Table 4). It is relevant to bear in mind that the SD of z-differences were kept below 20 cm in 93.2% of the reference plots and below 30 cm in all the plots, except in the plot number 14 located in the Allteak plantation (
Figure 6b). Note that these figures are not very far from those usually provided by the standard and existing UAV terrain mapping algorithms and software, which are able to produce very accurate and reliable DTMs (mean vertical error = −1.9 cm and RMSE = 3.5 cm) over exposed bare grounds [
59].
The results obtained in this work were more accurate than those reported by [
18,
22,
25,
60,
61], mainly because all the referred research works were undertaken over closed leaf-on canopy forest stands. For example, Jensen et al. [
22] applied UAV-SfM derived point clouds to build under vegetation DTMs in fifteen 20 × 20 m plots, reporting a mean vertical error of −0.19 m (ground reference overestimation) and a SD value of 0.66 m. Mlambo et al. [
25] found a DTM vertical error of up to 2.31 m (RMSE) working with UAV images and VisualSfM open source software over a very closed canopy forest plot (2.3 ha) that comprised dominant Sycamore (
Acer pseudoplatanus) and Scots pine (
Pinus sylvestris), while Yilmaz et al. [
61] recorded DTM vertical error of 30 cm and 28.7 cm (SD of z-differences), and 15.8 cm and −16.6 cm (mean z-differences), from using images taken by a fixed wing UAV over two test sites presenting relatively closed canopy forest stands. Finally, Ota et al. [
60] quantitatively proved that a more accurate DTM than the DTM derived from aerial photographs using the SfM approach would be needed to accurately estimate aboveground biomass in the case of closed canopy leaf-on tropical forests.
On the other hand, Moudrý et al. [
30] reported vertical root mean square error (RMSE) values ranging between 0.11 and 0.19 m from understory UAV-DAP DTMs generated in a deciduous forest under leaf-off conditions, while Moudrý et al. [
14] also found that the vertical accuracy of image-based DTMs declined in the following order: Forest under leaf-off conditions (RMSE 0.15 m), steppes (RMSE 0.21 m), and aquatic vegetation (RMSE 0.36 m). Aguilar et al. [
27] obtained low vertical error (SD = 7.4 cm), although showing higher bias (mean z-differences = −10.4 cm), by applying a workflow similar to the one used in this work over a 50 × 50 m plot located in a typical Mediterranean forest composed of an upper layer of Aleppo pine (
Pinus halepensis Mill.) and understory vegetation mainly formed of little holm oak trees (
Quercus ilex L.) and different species of shrubs. The total canopy cover was estimated at about 54.5% in this case. Similarly, Wallace et al. [
23] found that both UAV-DAP SfM and LiDAR provided a good representation of the terrain (mean z-differences = −9 cm) working over a 30 × 50 m plot located in a dry sclerophyll eucalyptus forest with spatially varying canopy cover, although the authors also underlined that the terrain was not adequately sampled in the SfM point cloud within under canopy areas. In fact, this is one of the key factors that explains the remarkable results attained in our study. As can be made out in
Figure 8, the UAV-DAP SfM technique was able to correctly model the under-canopy terrain in the case of leaf-off teak plantations with VC < 60%. VC values higher than 60% at the plot level were associated with less accurate UAV-DAP DTM, as revealed in the ANOVA test shown in
Table 5,
Table 6 and
Table 7. Similar results are reported by [
25], where SfM from UAVs proved to perform poorly in closed canopies, though providing suitable results in areas with sparse canopy cover (<50%).
The second key factor that can help explain the accurate DTMs obtained in this work would be the high accuracy photogrammetric bundle adjustment achieved when computing the internal and external camera orientation parameters. The rigorous field topography campaign conducted to georeference the five GCPs within each reference plot and the good performance of the SfM-MVS algorithm over the teak plantations in leaf-off conditions, resulted in an average point cloud planimetric and vertical error of 1.6 cm (maximum value of 6.4 cm) and 1.2 cm (maximum value of 5.5 cm), respectively (object space error). Regarding image space error, an average re-projection error of 0.48 pixels (maximum value of 0.91 pixels) was achieved. In any case, there is a growing need to explore the impacts of different image acquisition and processing parameters on DAP SfM derived outputs such as flying height, software package choice and parameter settings [
60,
62,
63].
The last key factor that supports the accurate results reached in this work would be the good performance of both the ground points filtering algorithm (including outlier removal) and the interpolation method applied to generate the final DTM. Even though the point cloud filtering results could have been better if the three TIN iterative approach parameters had been properly tuned for optimum performance in each reference plot, we preferred to keep them constant and adopt conservative values in order to speed up the process and ensure a low number of false positives (type I error). Furthermore, the TIN iterative approach has demonstrated to be one of the most robust point cloud filtering algorithms [
64]. The automatic outlier removal applied just before building the DTM also helped to ensure the reliability of the points labeled as ground.
As previously explained, it is usually necessary to densify the initial UAV-DAP point cloud when the surveyed area presents dense vegetation. The new ground points must be interpolated to infill the gaps and construct accurate DTMs. Interpolation methods used for infilling gaps may produce a non-negligible error usually named gridding error [
65], which is due to the propagation of the sample data error (point cloud error in this case) towards interpolated points. In this sense, gridding error depends on sample data error, initial sample point density, terrain complexity and interpolation method [
66,
67]. In this work, the terrain complexity has been estimated using the average slope of the plot as a terrain descriptor, not resulting in a plot feature significantly correlated with the vertical DTM error, as can be seen in the ANOVA tests that are shown in
Table 5,
Table 6 and
Table 7. Note that a well-known characteristic of observed elevation error for terrain mapping is the relationship with terrain slope, especially in the case of DTM generation by means of laser scanning, where planimetric error may be relatively high and also may be directly translated to vertical error on sloping surfaces [
36,
68]. However, the planimetric error of the UAV-DAP point clouds computed in this work took a value of 1.6 cm on average, much lower than the nominal planimetric error of LiDAR derived point clouds. Moreover, the terrain average slope turns out to be not suitable to explain full terrain complexity in some occasions [
69].
In
Figure 9 are depicted the UAV-DAP points labelled as ground (in red) overlaid onto the GMRF interpolated DTM in the case of the reference plot number 13 (Allteak) in which the estimated VC reached a large value of 83.96%. In this respect, it can be highlighted the abundance of ground gaps to be interpolated in order to obtain a continuous surface for modelling the terrain topography under forest canopy. Despite this fact, the GMRF interpolation algorithm was able to properly fill the ground blanks yet producing a smooth and apparently truthful DTM. Furthermore, GMRF does not require to specify the local support or kernel (searching radius or maximum number of neighbors intervening in the interpolation of each grid point), which can be qualified as very advantageous, above all when dealing with low density ground points areas such as forest environments [
39].
5. Conclusions
In order to obtain high quality DTMs as ancillary data to support efficient teak plantations inventories in the tropical dry forest located in the coastal region of Ecuador, and considering that most of the teak plantations are managed under rainfed conditions, the results obtained in this work have confirmed the initial hypothesis pointing to the convenience of carrying out the UAV imagery acquisition at the end of the dry season (i.e., from November to December) when teak trees are practically leafless. This strategy has proven to be suitable to increase the exposed bare ground by avoiding ground surface visual occlusions from a top view (UAV-DAP) due to presence of dense canopy, thus improving SfM-MVS point matching at ground level and, consequently, the accuracy of the UAV-DAP derived DTM. Complementary UAV field work should be faced at the end of the rainy season (leaf-on phenological stage), i.e., from approximately April to May in the climate conditions or our study site, to obtain high quality CHMs given by the difference between CSM (leaf-on capture) and DTM (leaf-off capture).
The mentioned strategy resulted in UAV-DAP derived DTMs presenting low bias or systematic error, with an average plot-level value of −3.1 cm for the mean vertical error calculated on the 58 reference plots that took part in this study. It means that the UAV-DAP DTM tended to slightly overestimates the reference ground elevation, although is quite remarkable that up to 86.3% of the reference plots presented DTM mean vertical error lower than 5 cm in terms of absolute values.
Regarding vertical random error, the average SD value the UAV-DAP derived DTMs was greater than the mean vertical error, taking an average value of 11.9 cm. Here it is worth noting than up to 93.2% of the reference plots showed SD values below 20 cm, which can be considered as a reasonable vertical error threshold as compared to the accuracy provided by LiDAR based methods.
Both basal area and estimated vegetation coverage, two plot-level features closely related to forest stand volume and structure that may affect the visibility of bare earth from a top view (UAV-DAP), presented a statistically significant (p < 0.05) relationship with the tested plot-level DTM vertical error statistics such as mean, SD and L90. In fact, the higher the basal area or the estimated vegetation coverage, the higher the vertical error in the DTM derived from UAV-DAP. This relationship was particularly meaningful from threshold values above 15 m2/ha and 60% in the cases of basal area and estimated vegetation coverage, respectively.
The high quality UAV-DAP derived DTMs obtained in this work, together with the corresponding UAV-DAP derived CSMs that will be generated in leaf-on conditions and the allometric equations which are being developed in the context of the research project that finances this study, constitute the basis of an efficient remote sensing based method to carry out an upscaling process headed up to estimate aboveground biomass over the teak plantations located in the coastal region of Ecuador. This method could potentially be applied, after proper calibration and validation, to other teak plantations located in seasonally dry tropical forests to assist in the REDD monitoring and sustainable management.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}