Quasi-Static Current Measurement with Field-Modulated Spin-Valve GMR Sensors †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods and Experiments
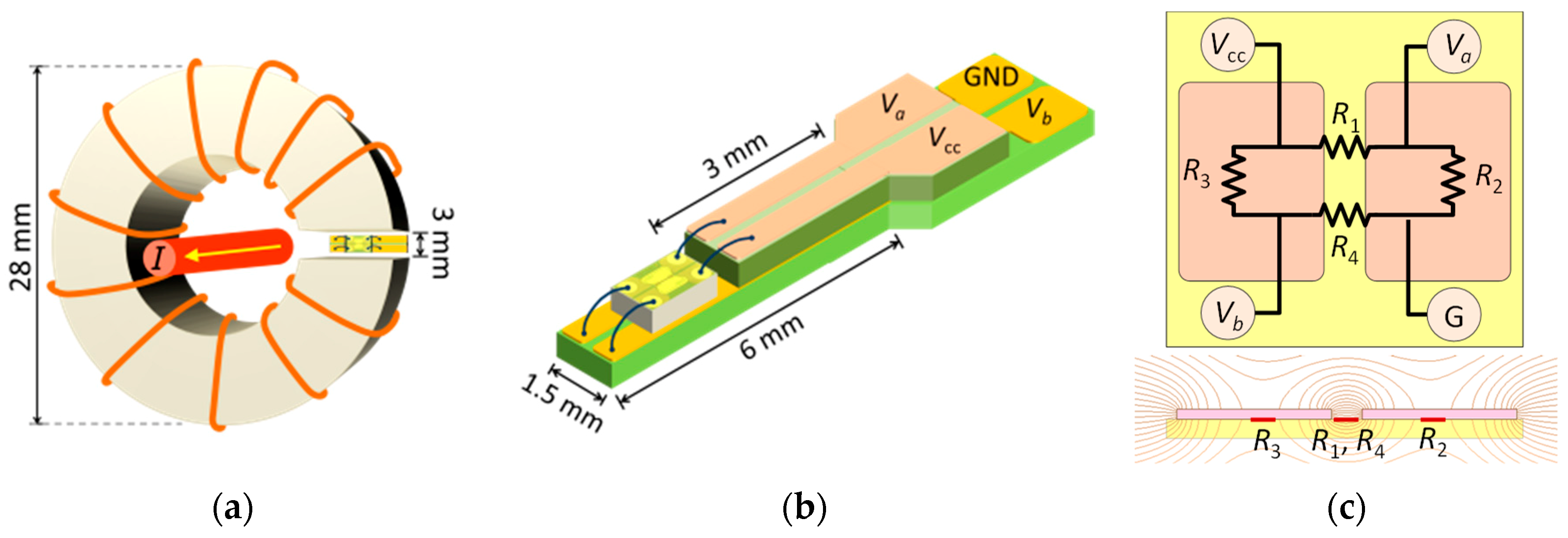
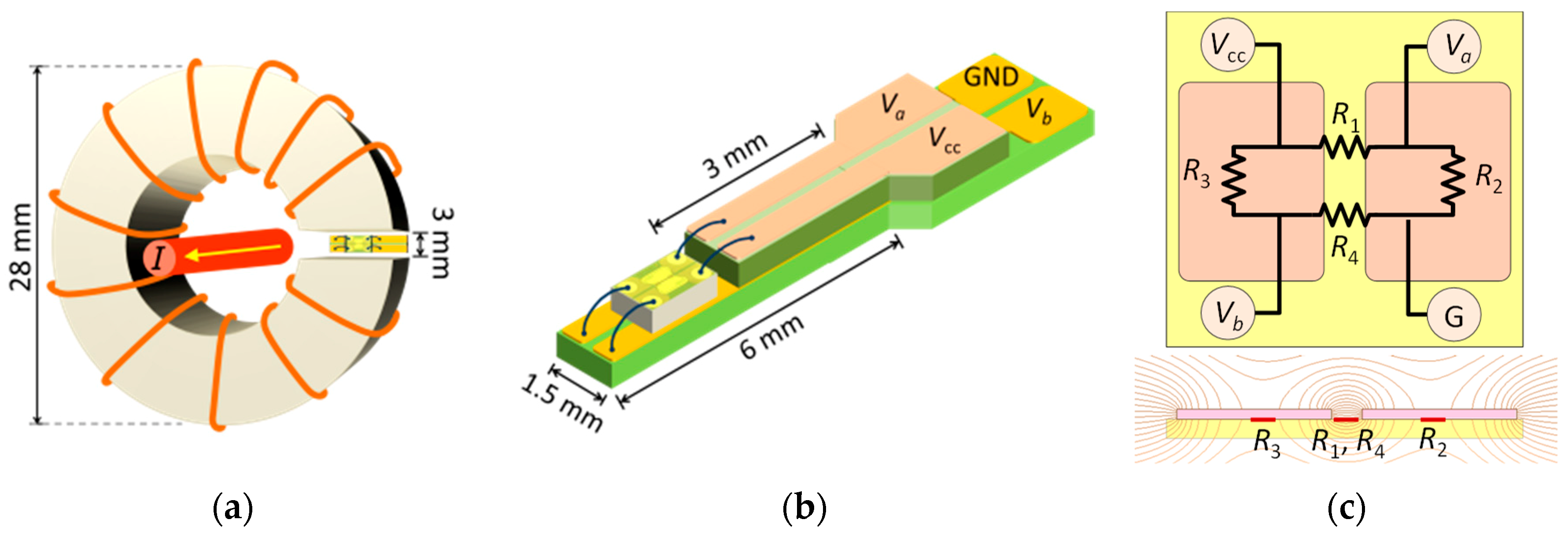
2.1. Design of the GMR-Based Device
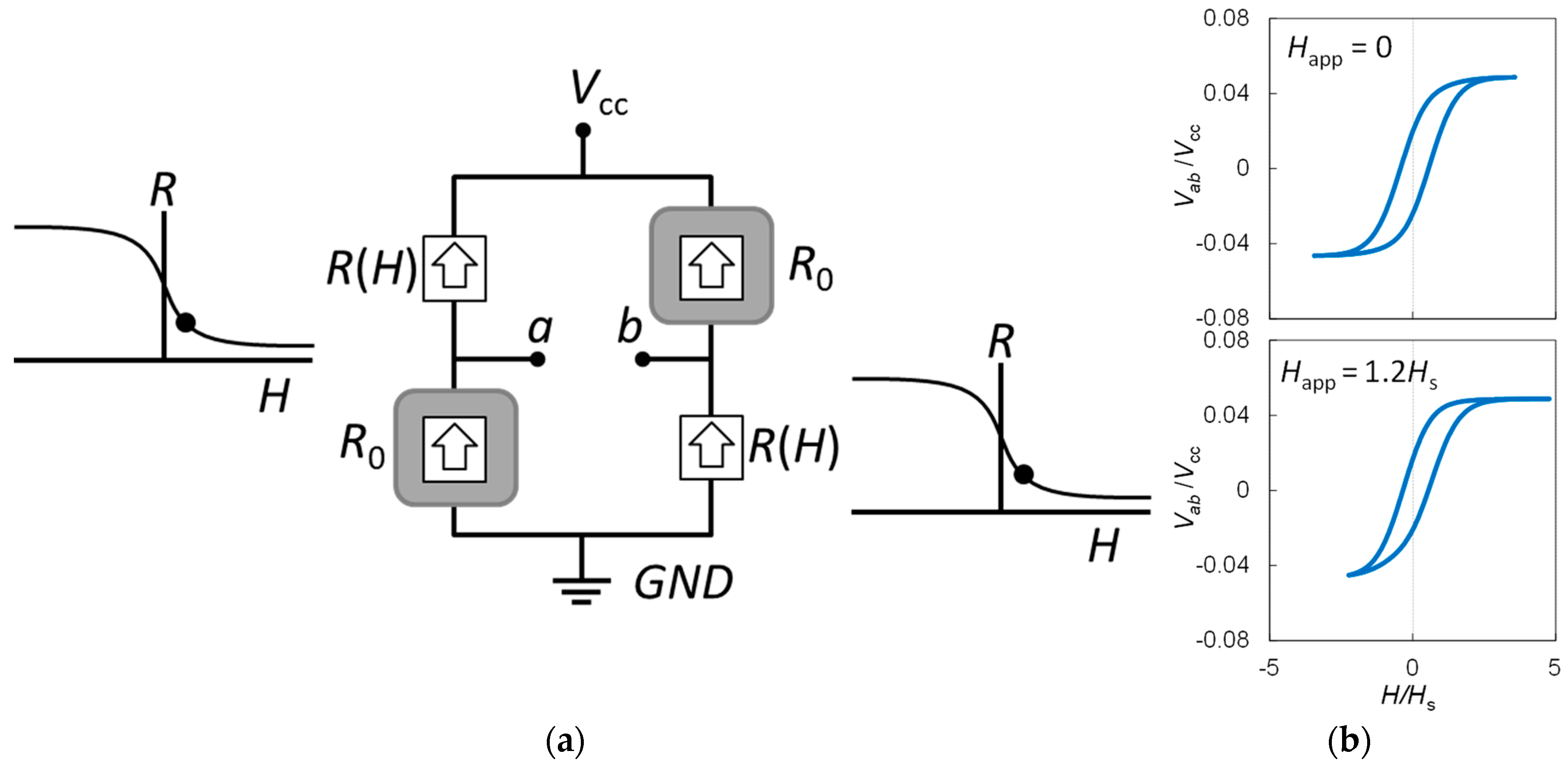
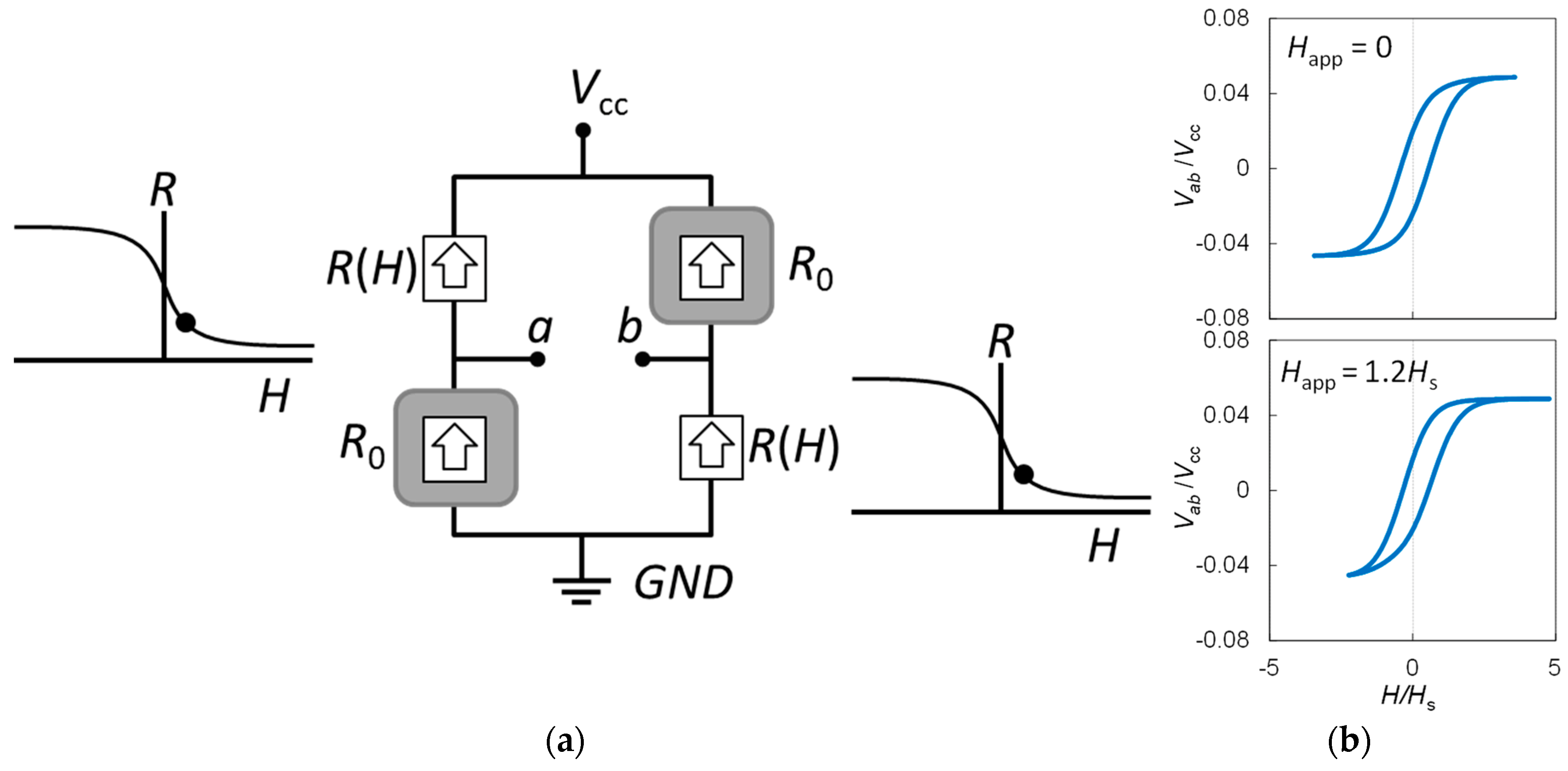
2.2. Sensing Principles
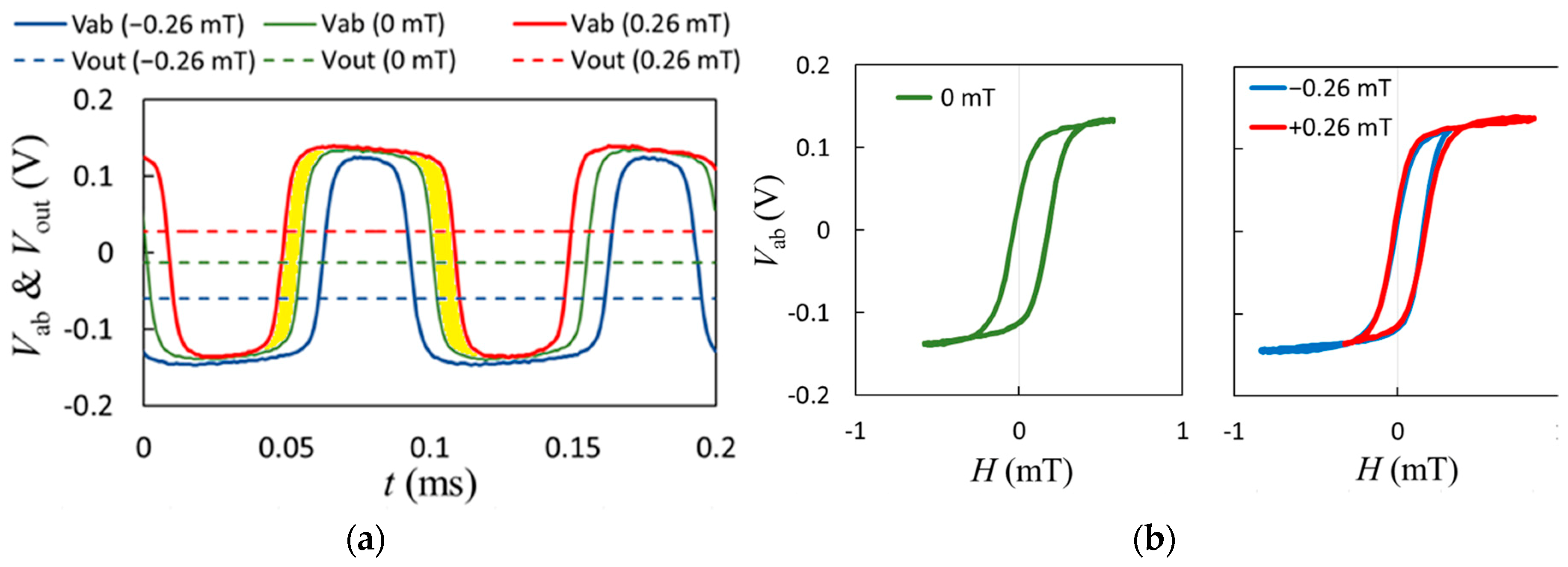
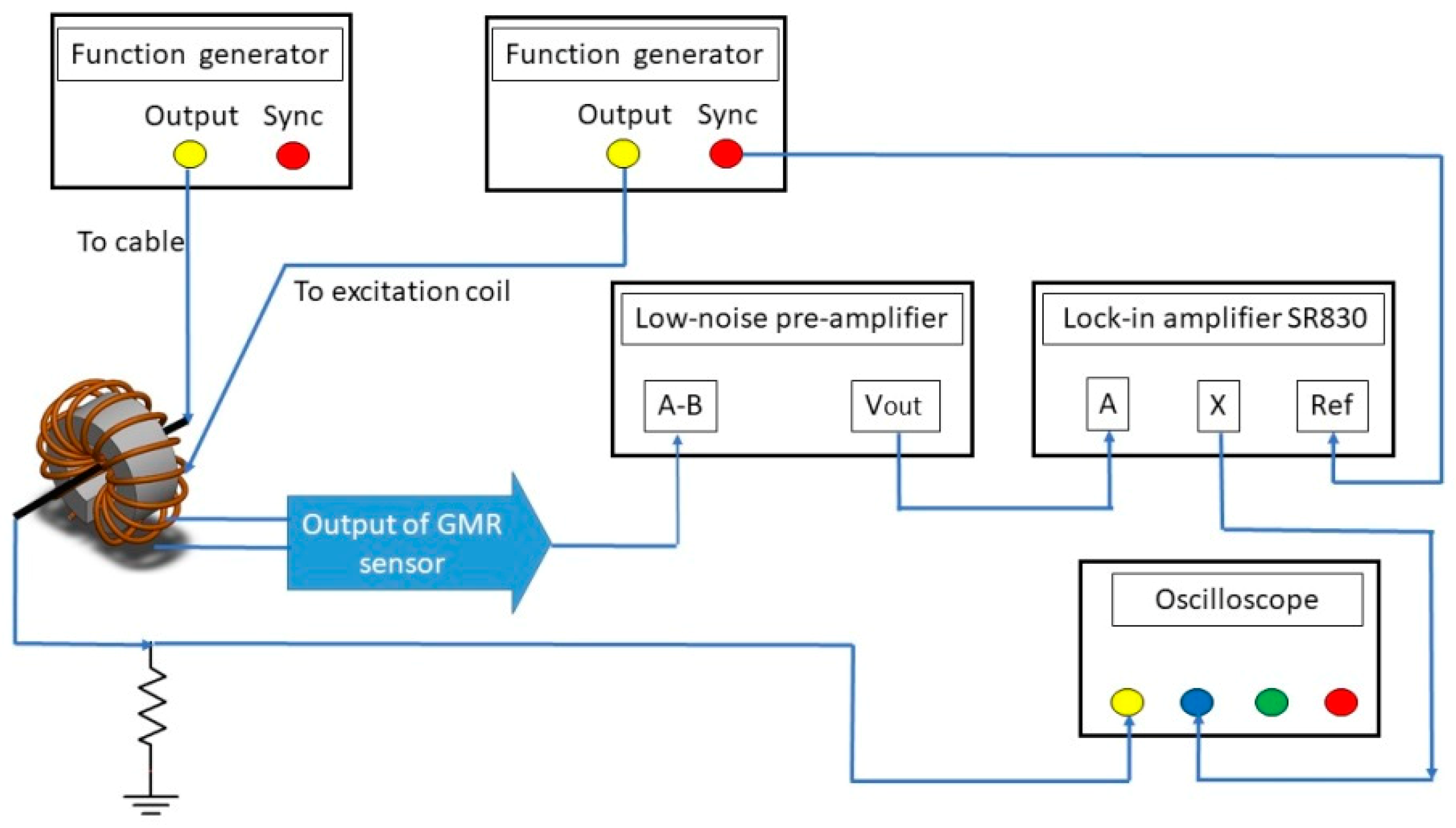
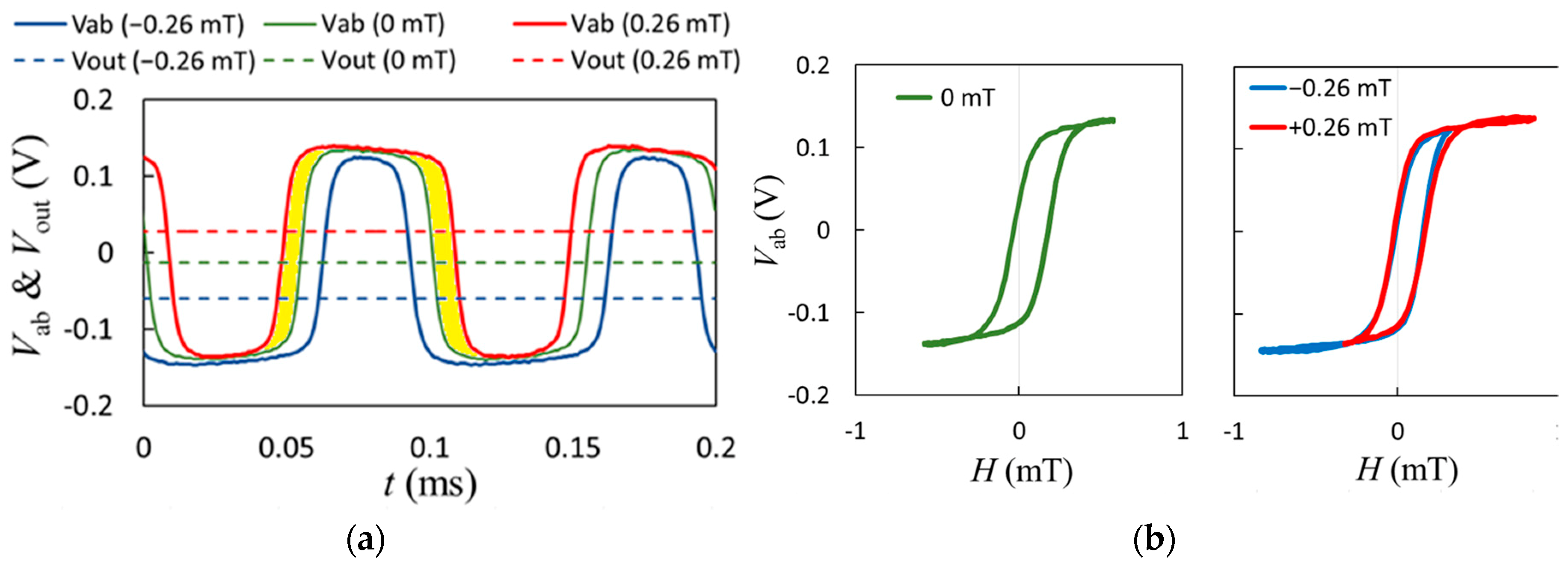
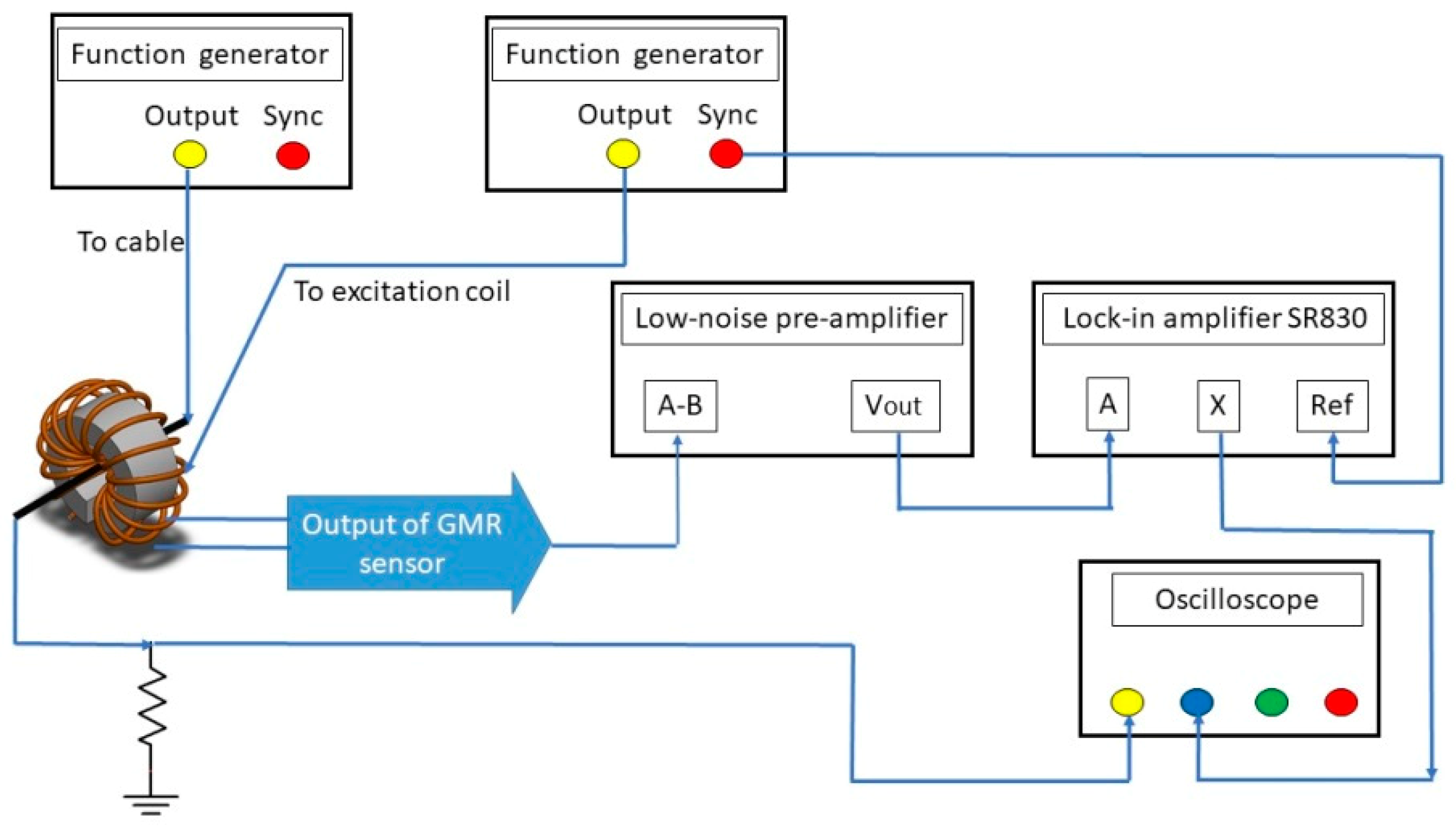
2.3. Measurement Experiment
3. Results and Discussions
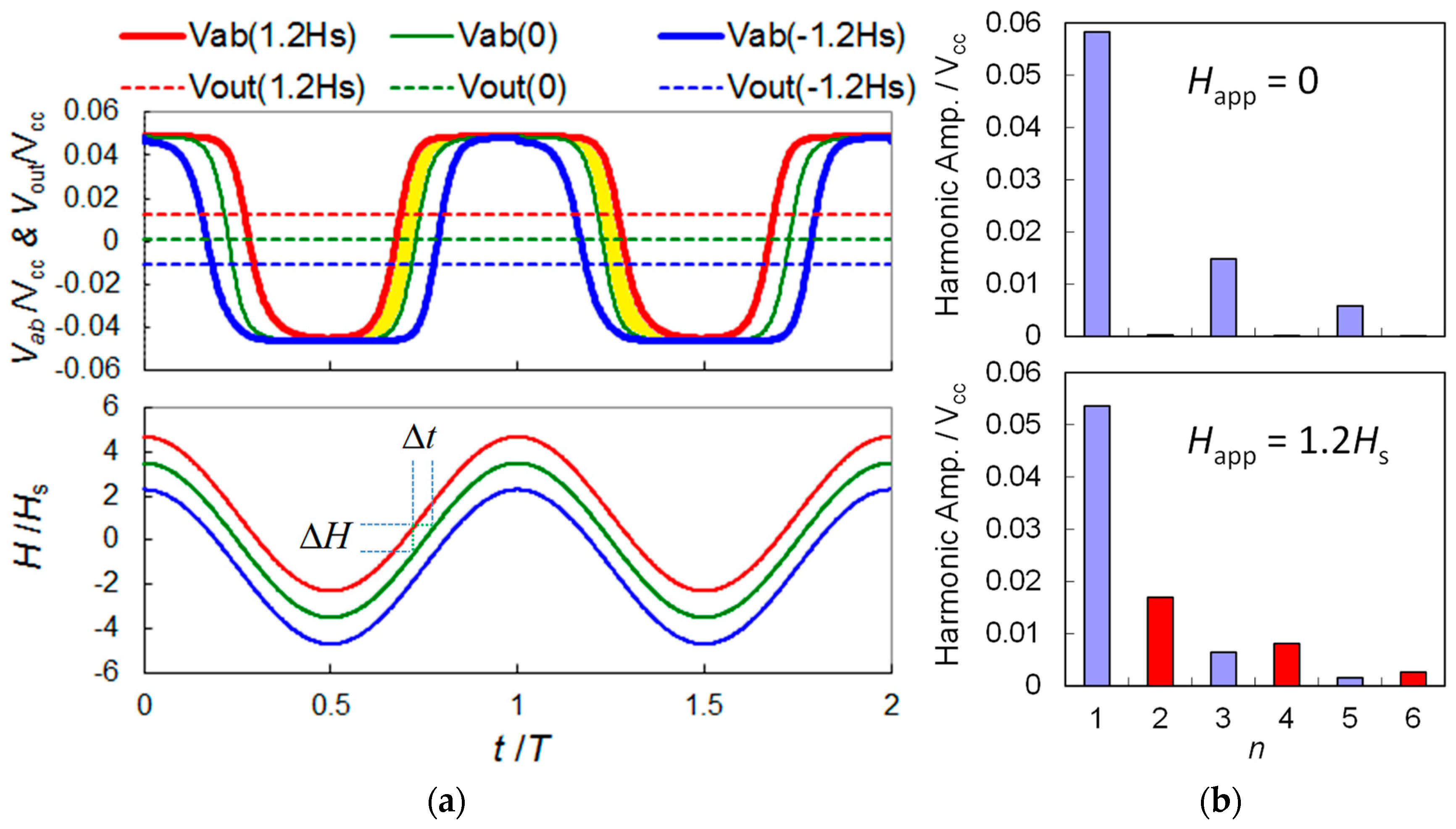
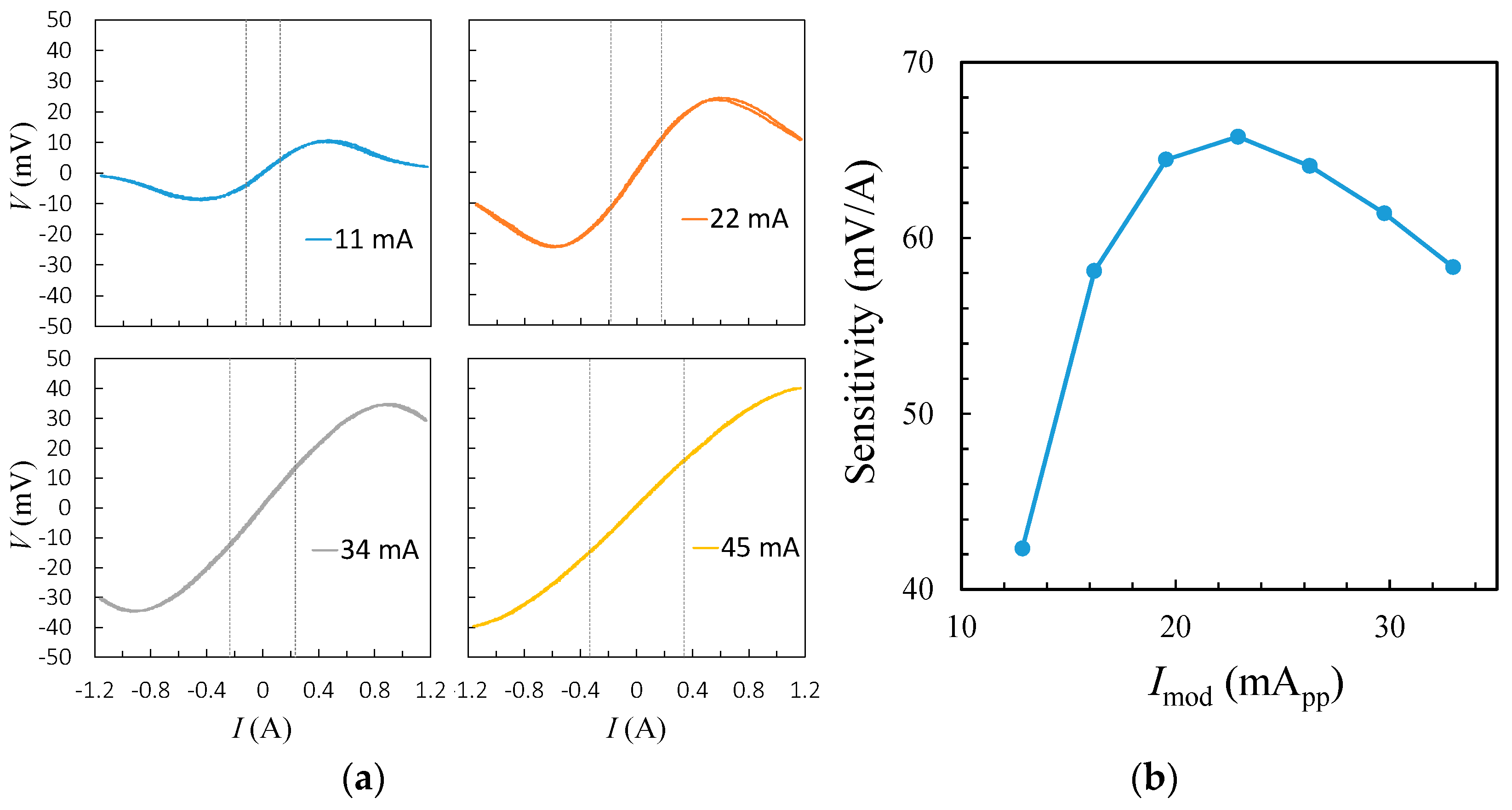
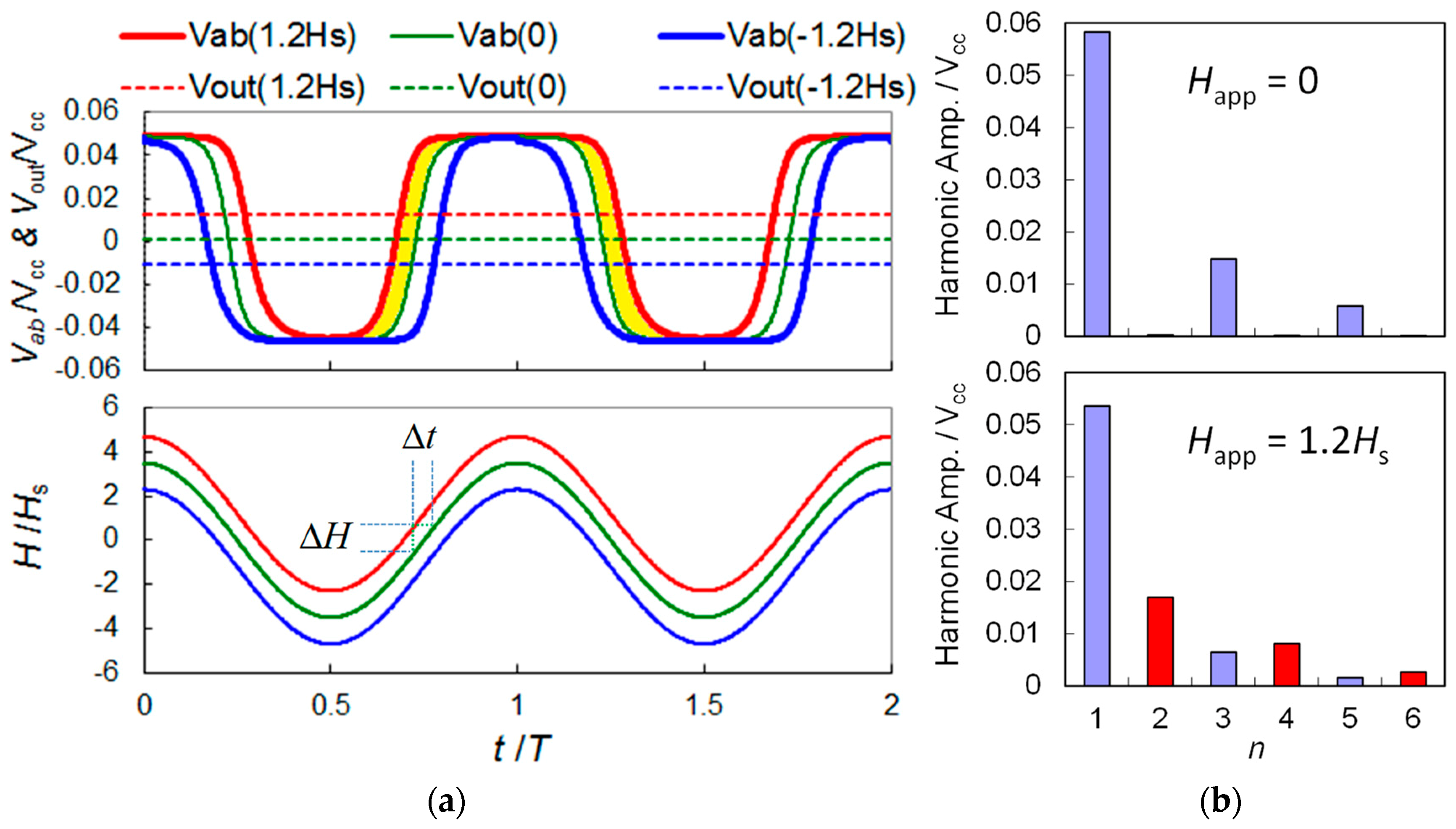
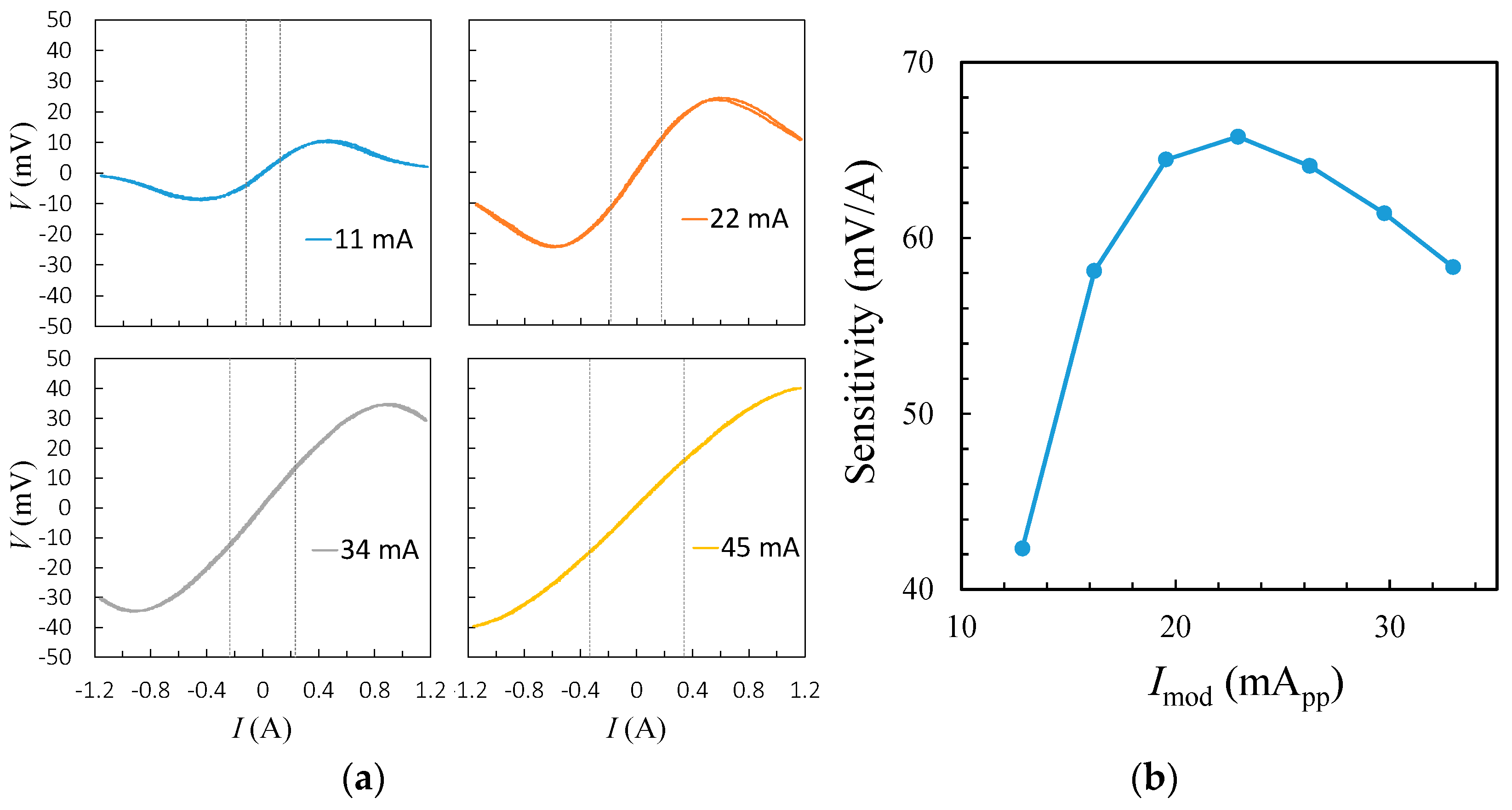
3.1. Demodulated Sensitivity
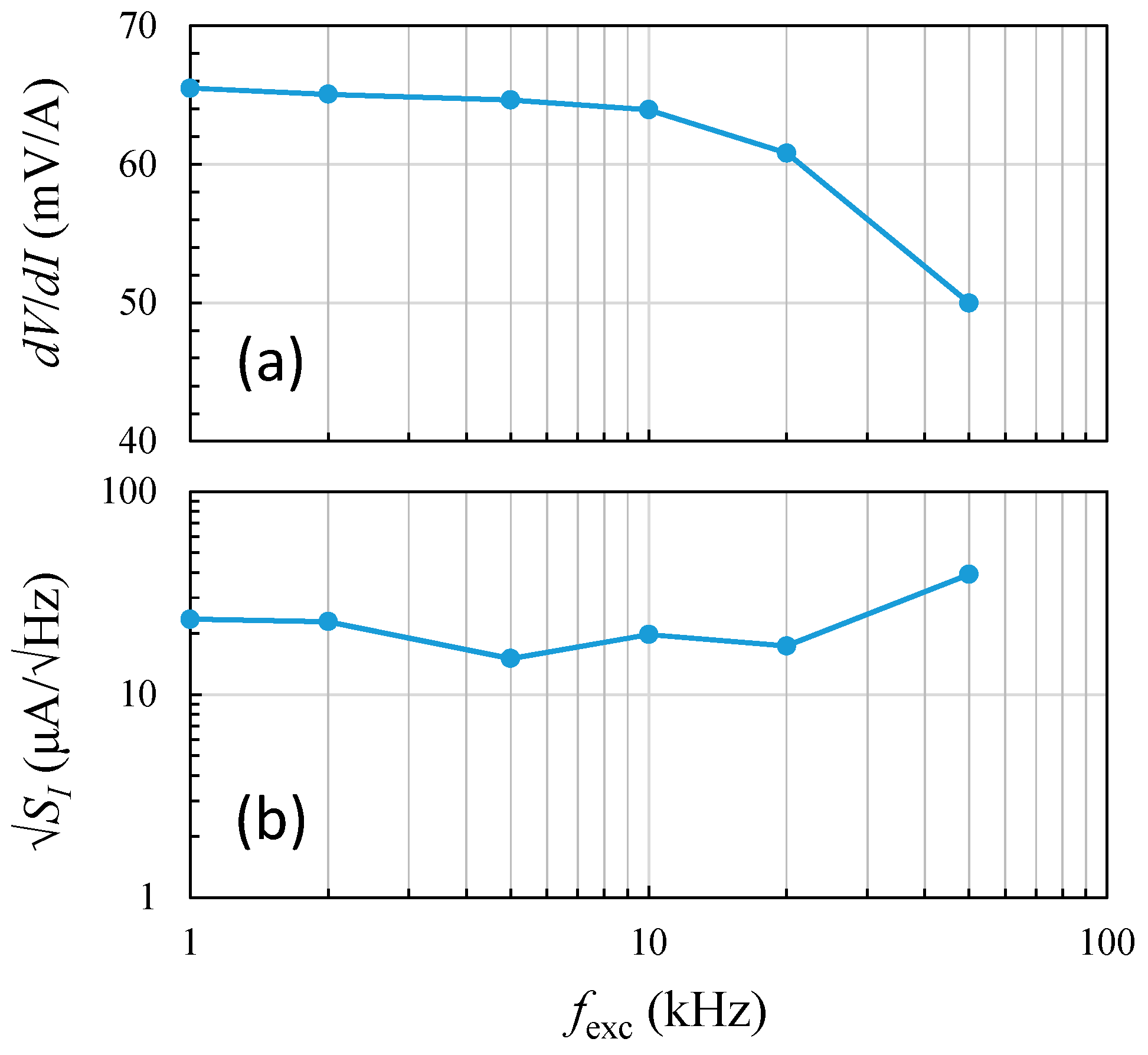
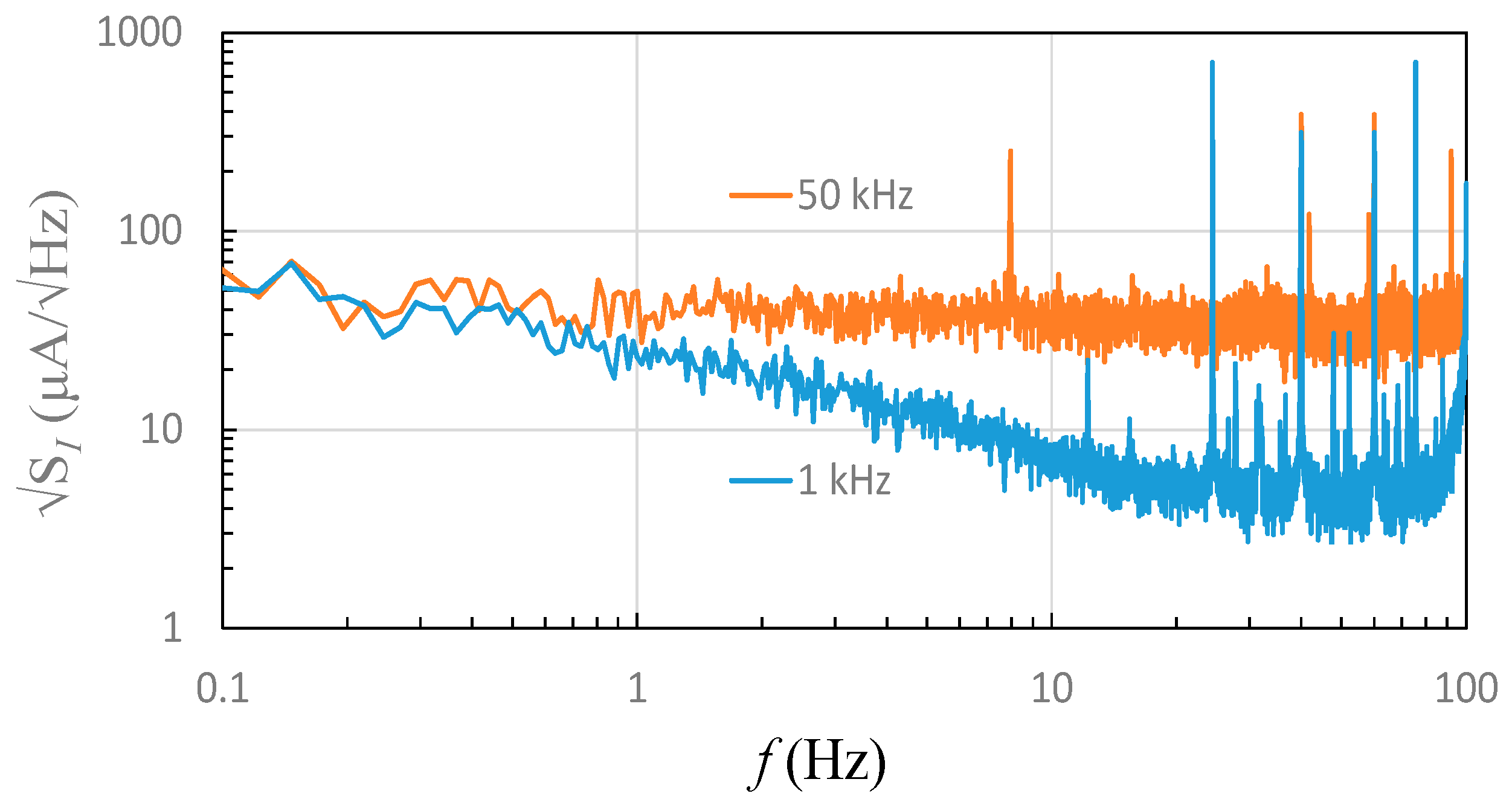
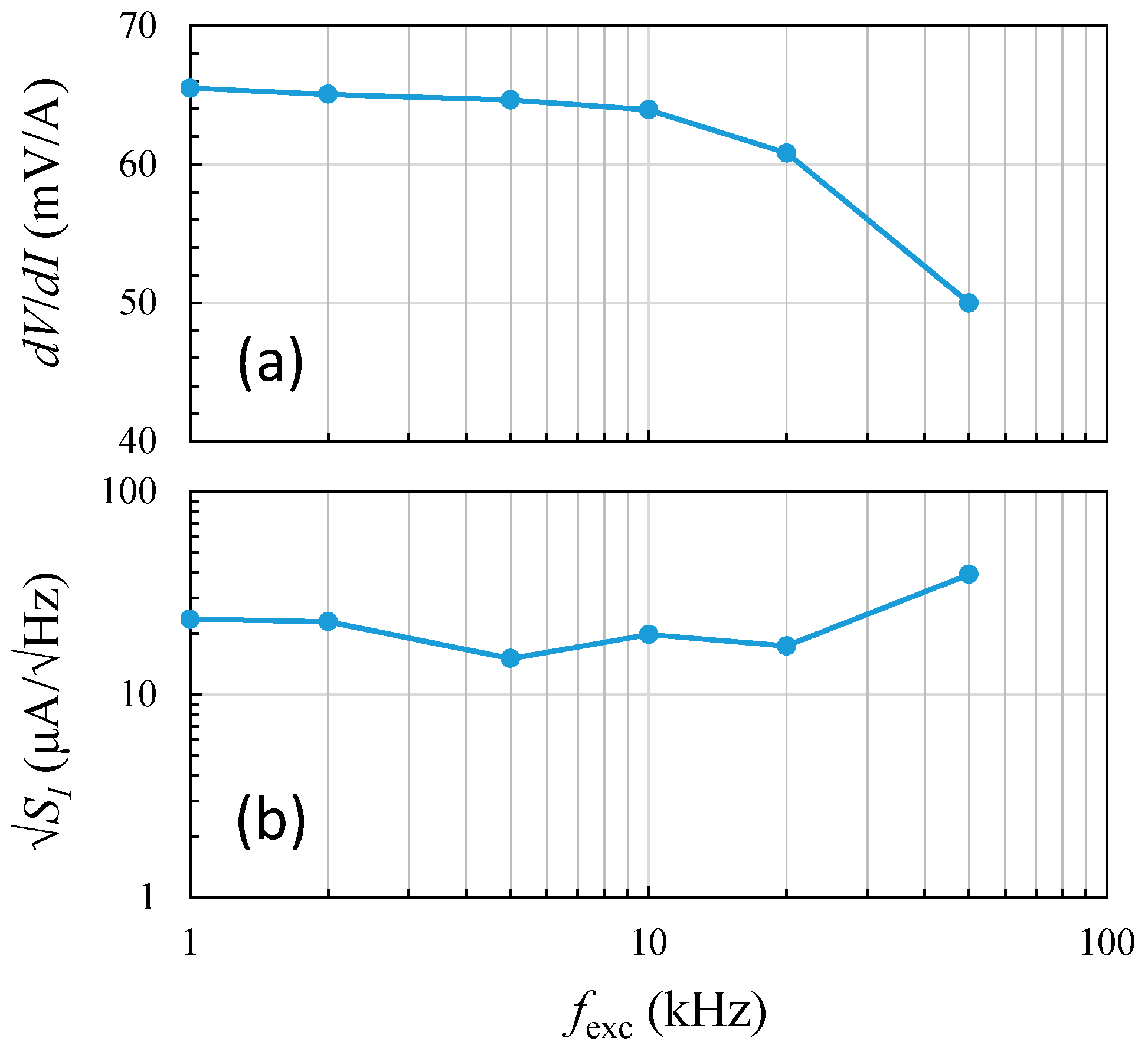
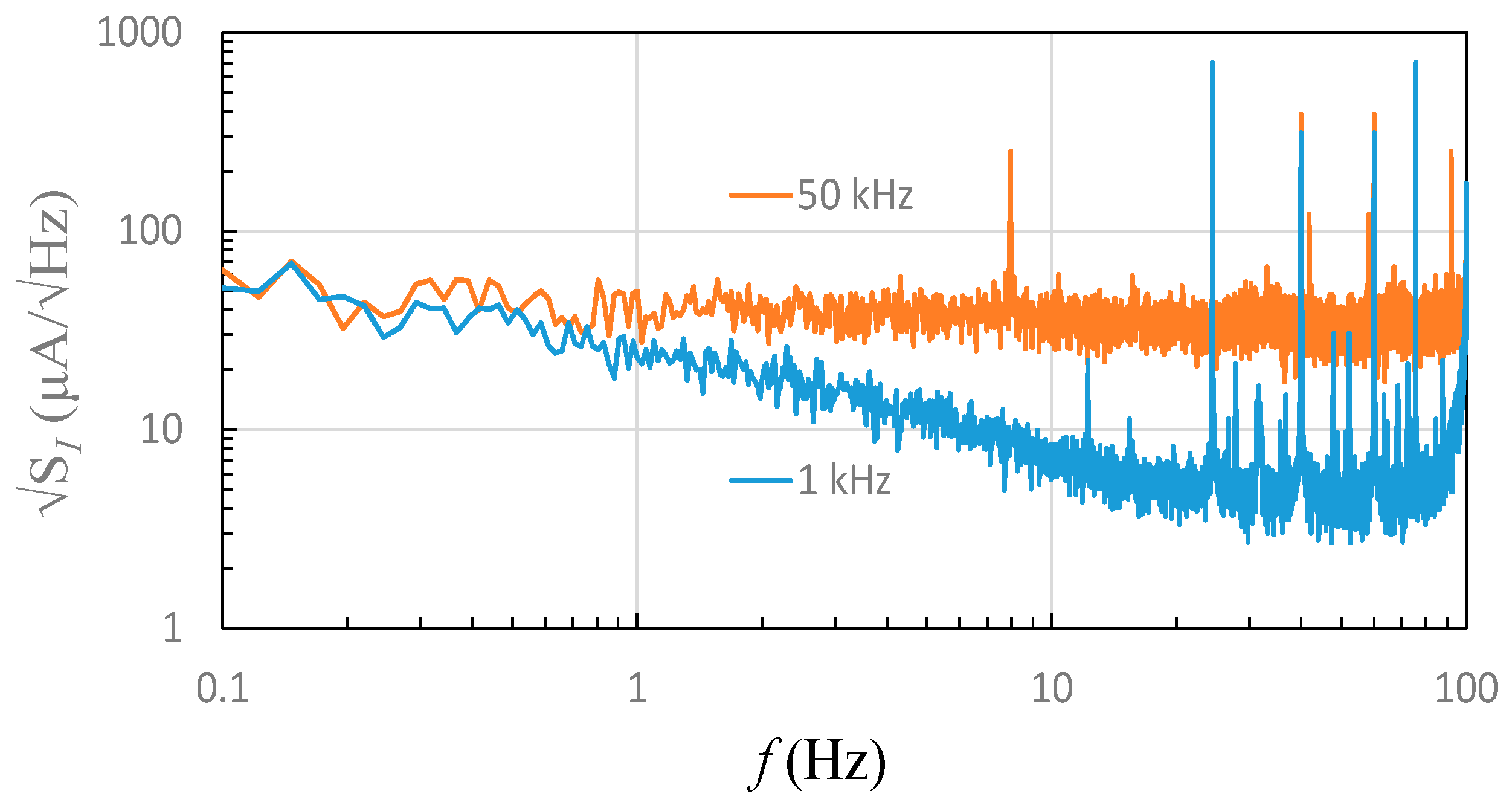
3.2. Frequency Dependence
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Borole, U.P.; Subramaniam, S.; Kulkarni, I.R.; Saravanan, P.; Barshilia, H.C.; Chowdhury, P. Highly sensitive giant magnetoresistance (GMR) based ultralow differential pressure sensor. Sens. Actuators A Phys. 2018, 280, 125–131. [Google Scholar] [CrossRef]
- Ravi, N.; Rizzi, G.; Chang, S.E.; Cheung, P.; Utz, P.J.; Wang, S.X. Quantification of cDNA on GMR biosensor array towards point-of-care gene expression analysis. Biosens. Bioelectron. 2019, 130, 338–343. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Klein, T.; Krishna, V.D.; Su, D.; Perez, A.M.; Wang, J.P. Portable GMR handheld platform for the detection of influenza A virus. ACS Sens. 2017, 2, 1594–1601. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhang, Y.; Ma, L.; Ren, F.; Sun, Y.; Sun, X. Research about the water pollution detection technologies based on GMR sensor. AIP Conf. Proc. 2019, 2073, 020042. [Google Scholar]
- Huang, C.C.; Lin, C.L.; Kao, J.J.; Chang, J.J.; Sheu, G.J. Vehicle Parking Guidance for Wireless Charge Using GMR Sensors. IEEE Trans. Veh. Technol. 2018, 67, 6882–6894. [Google Scholar] [CrossRef]
- Jeng, J.T.; Chiang, C.Y.; Chang, C.H.; Lu, C.C. Vector magnetometer with dual-bridge GMR sensors. IEEE Trans. Magn. 2014, 50, 4000704. [Google Scholar] [CrossRef]
- Brauhn, T.J.; Sheng, M.; Dow, B.A.; Nogawa, H.; Lorenz, R.D. Module-integrated GMR-based current sensing for closed-loop control of a motor drive. IEEE Trans. Ind. Appl. 2017, 53, 222–231. [Google Scholar] [CrossRef]
- Mattheis, R.; Diegel, M.; Weiss, R. Giant magnetoresistance-stack optimization for current sensor application with low hysteresis and a temperature-independent sensitivity at low current. IEEE Trans. Magn. 2016, 52, 1–6. [Google Scholar] [CrossRef]
- Nibir, S.J.; Hurwitz, E.; Karami, M.; Parkhideh, B. A technique to enhance the frequency bandwidth of contactless magnetoresistive current sensors. IEEE Trans. Ind. Electron. 2016, 63, 5682–5686. [Google Scholar] [CrossRef]
- Ouyang, Y.; He, J.; Hu, J.; Wang, S.X. A current sensor based on the giant magnetoresistance effect: Design and potential smart grid applications. Sensors 2012, 12, 15520–15541. [Google Scholar] [CrossRef] [PubMed]
- Luong, V.S.; Lu, C.C.; Yang, J.W.; Jeng, J.T. A novel CMOS transducer for giant magnetoresistance sensors. Rev. Sci. Instrum. 2017, 88, 025004. [Google Scholar] [CrossRef] [PubMed]
- García-Romeo, D.; Medrano, N.; Calvo, B.; Martínez, P.A.; Cubells-Beltrán, M.D.; Reig, C.; Cardoso, S.; Freitas, P.P. Sub-mA current measurement by means of GMR sensors and state of the art lock-in amplifiers. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3377–3381. [Google Scholar]
- Magnetoresistive Magnetic Field Sensor: GF708, Sensitec GmbH. Available online: https://www.sensitec.com/ (accessed on 8 February 2019).
- Luong, V.S.; Su, Y.H.; Lu, C.C.; Jeng, J.T.; Hsu, J.H.; Liao, M.H.; Wu, J.C.; Lai, M.H.; Chang, C.R. Planarization, fabrication and characterization of three-dimensional magnetic field sensors. IEEE Trans. Nanotechnol. 2018, 17, 11–25. [Google Scholar] [CrossRef]
- Chiang, Y.S.; Trinh, X.T.; Jeng, J.T. Flat bandwidth expansion for spin-valve GMR magnetic field sensors. IEEE Trans. Magn. 2019, 54, 4001404. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeng, J.-T.; Trinh, X.-T.; Hung, C.-H.; Lu, C.-C. Quasi-Static Current Measurement with Field-Modulated Spin-Valve GMR Sensors. Sensors 2019, 19, 1882. https://doi.org/10.3390/s19081882
Jeng J-T, Trinh X-T, Hung C-H, Lu C-C. Quasi-Static Current Measurement with Field-Modulated Spin-Valve GMR Sensors. Sensors. 2019; 19(8):1882. https://doi.org/10.3390/s19081882
Chicago/Turabian StyleJeng, Jen-Tzong, Xuan-Thang Trinh, Chih-Hsien Hung, and Chih-Cheng Lu. 2019. "Quasi-Static Current Measurement with Field-Modulated Spin-Valve GMR Sensors" Sensors 19, no. 8: 1882. https://doi.org/10.3390/s19081882
APA StyleJeng, J.-T., Trinh, X.-T., Hung, C.-H., & Lu, C.-C. (2019). Quasi-Static Current Measurement with Field-Modulated Spin-Valve GMR Sensors. Sensors, 19(8), 1882. https://doi.org/10.3390/s19081882