Real-Time Classification of Multivariate Olfaction Data Using Spiking Neural Networks


Abstract
1. Introduction
2. Approach
3. Rank-Order Encoding and Classifiers—Overview
4. Implementation Methods
4.1. Input Dataset
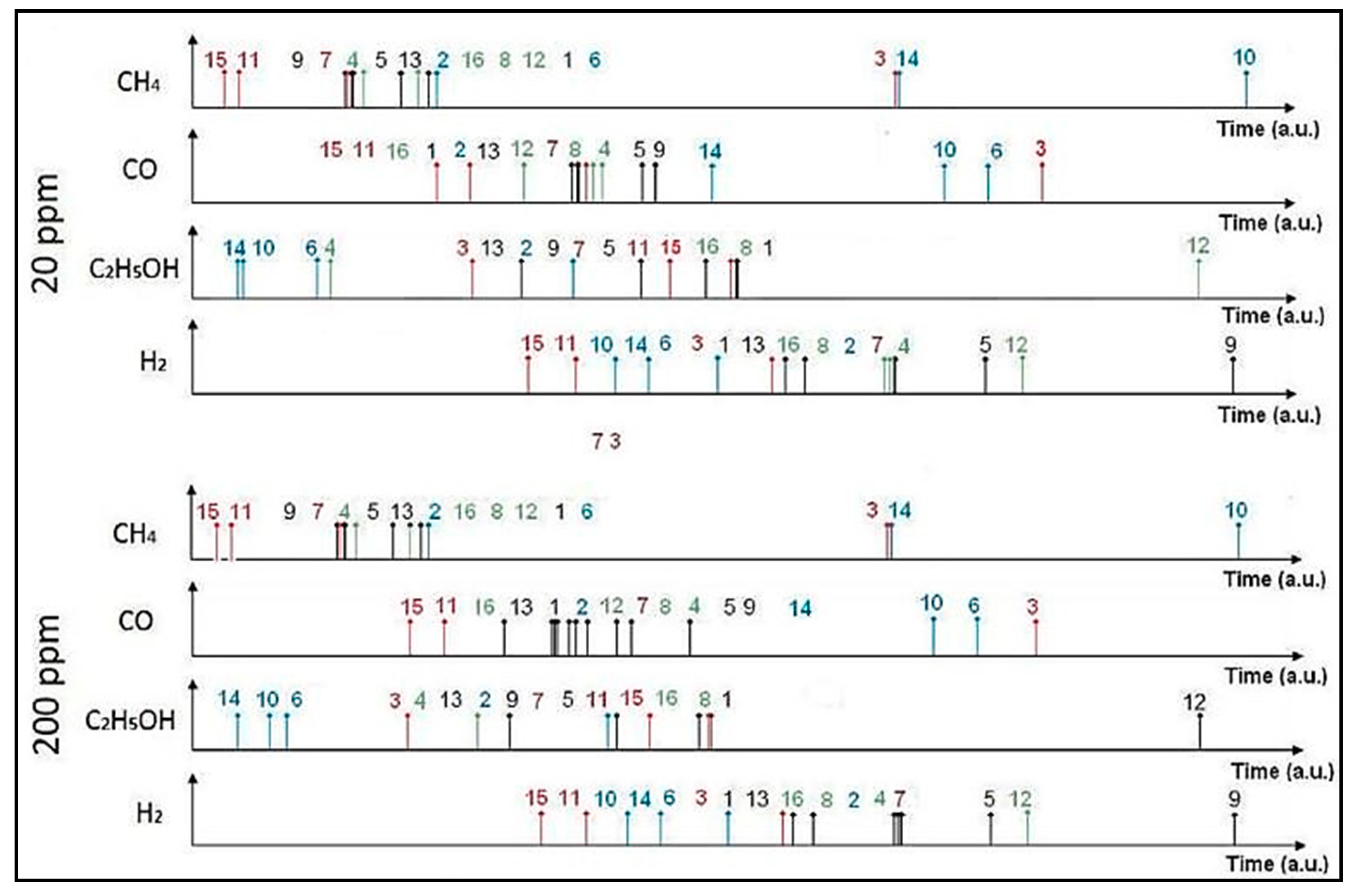
4.2. Rank-Order Encoder
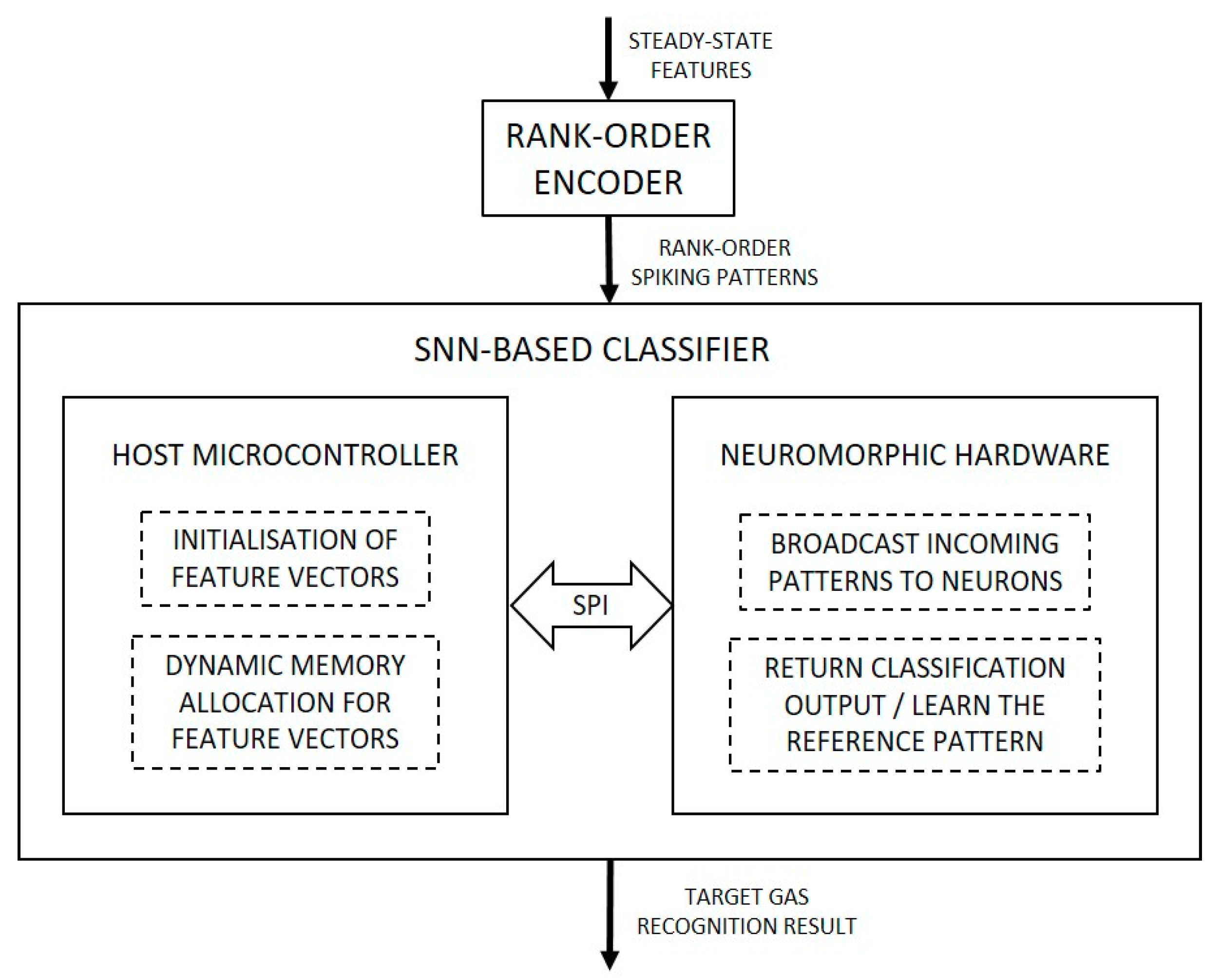
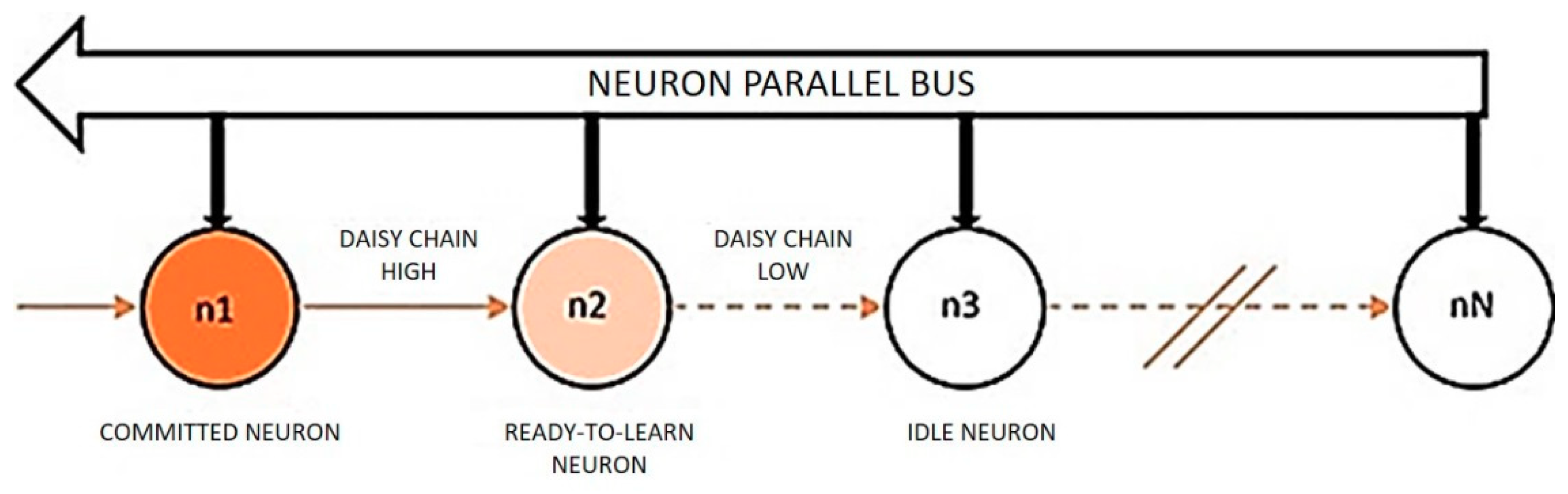
4.3. Network Layout
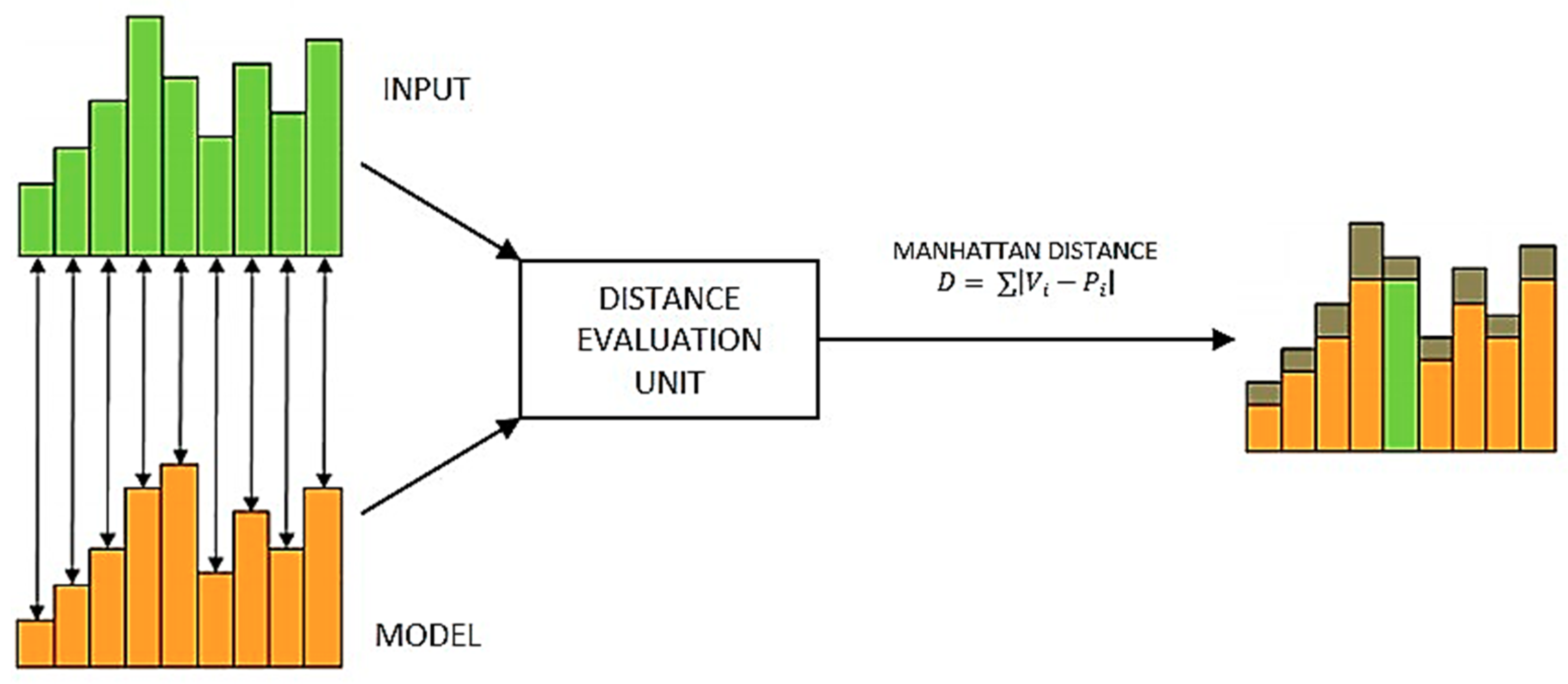
4.4. Supervised Learning
5. Results and Discussion
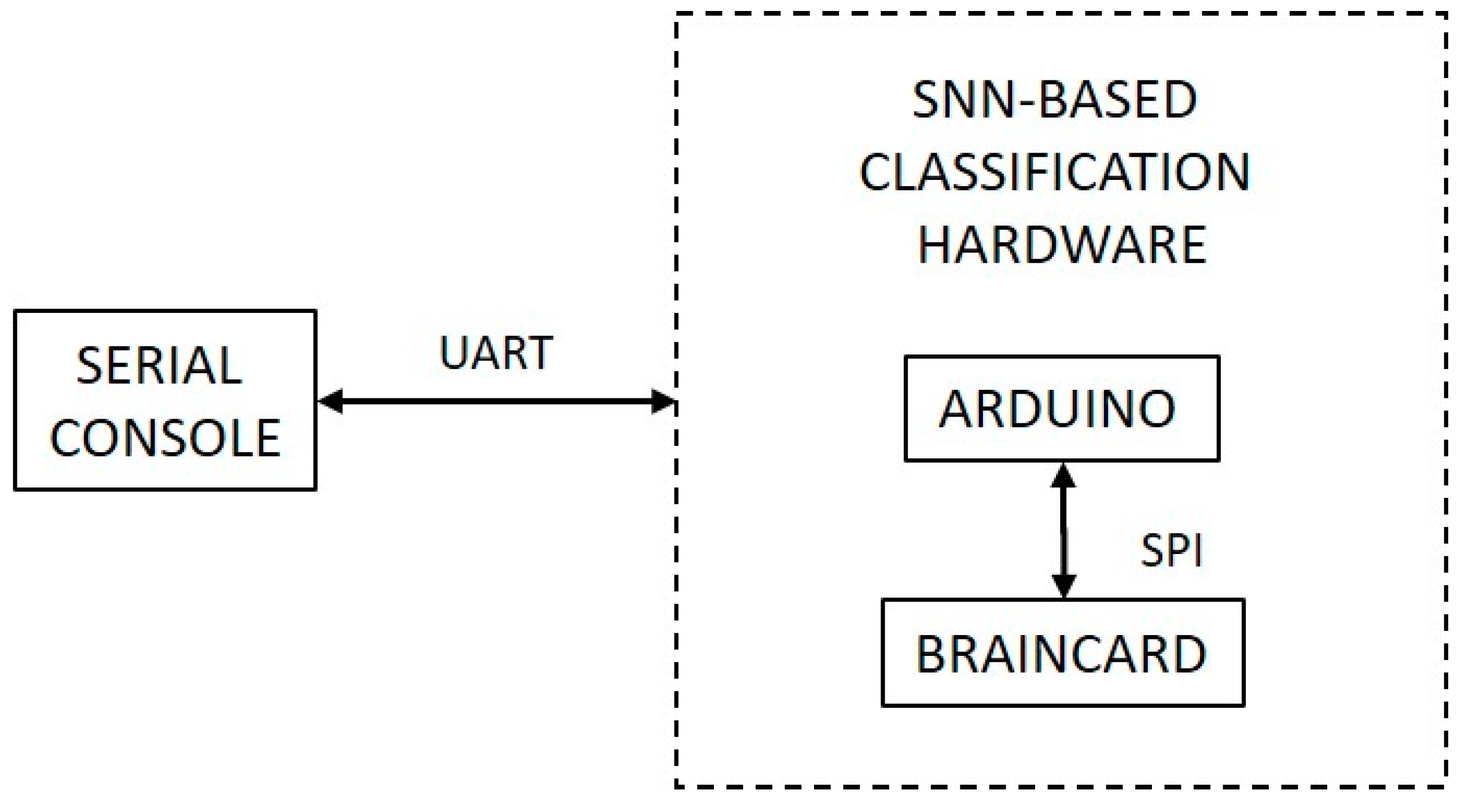
5.1. System Configuration
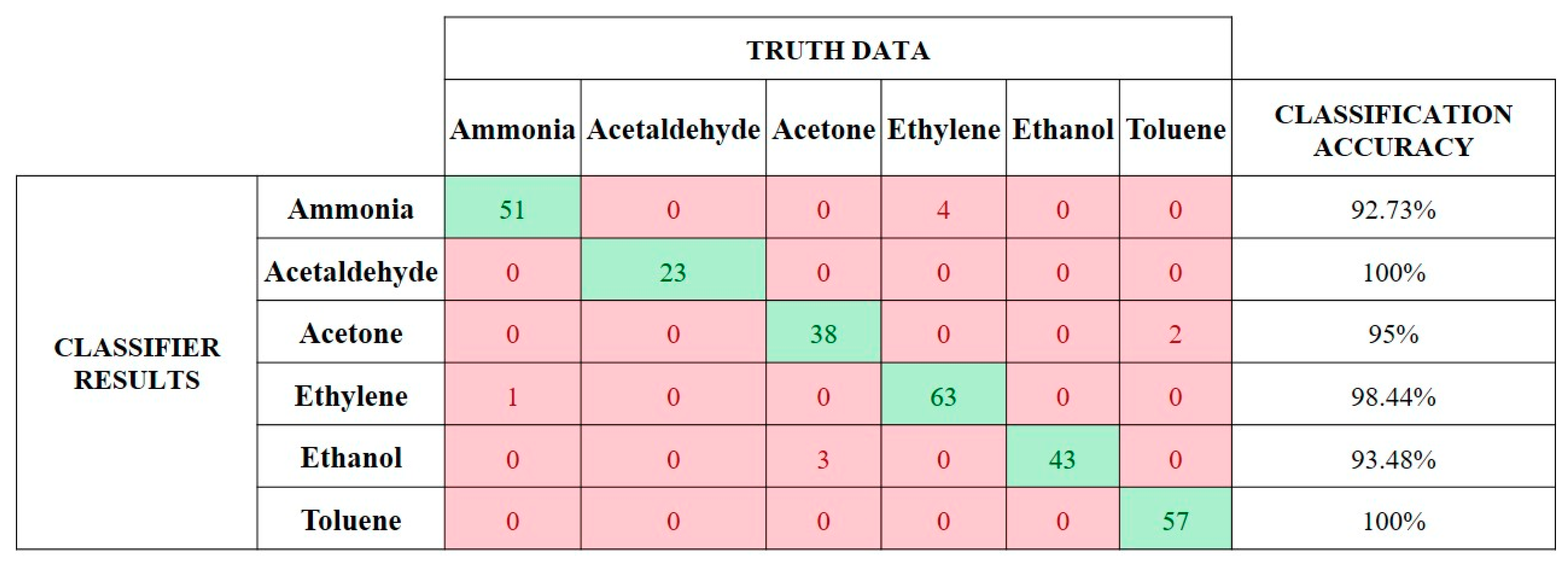
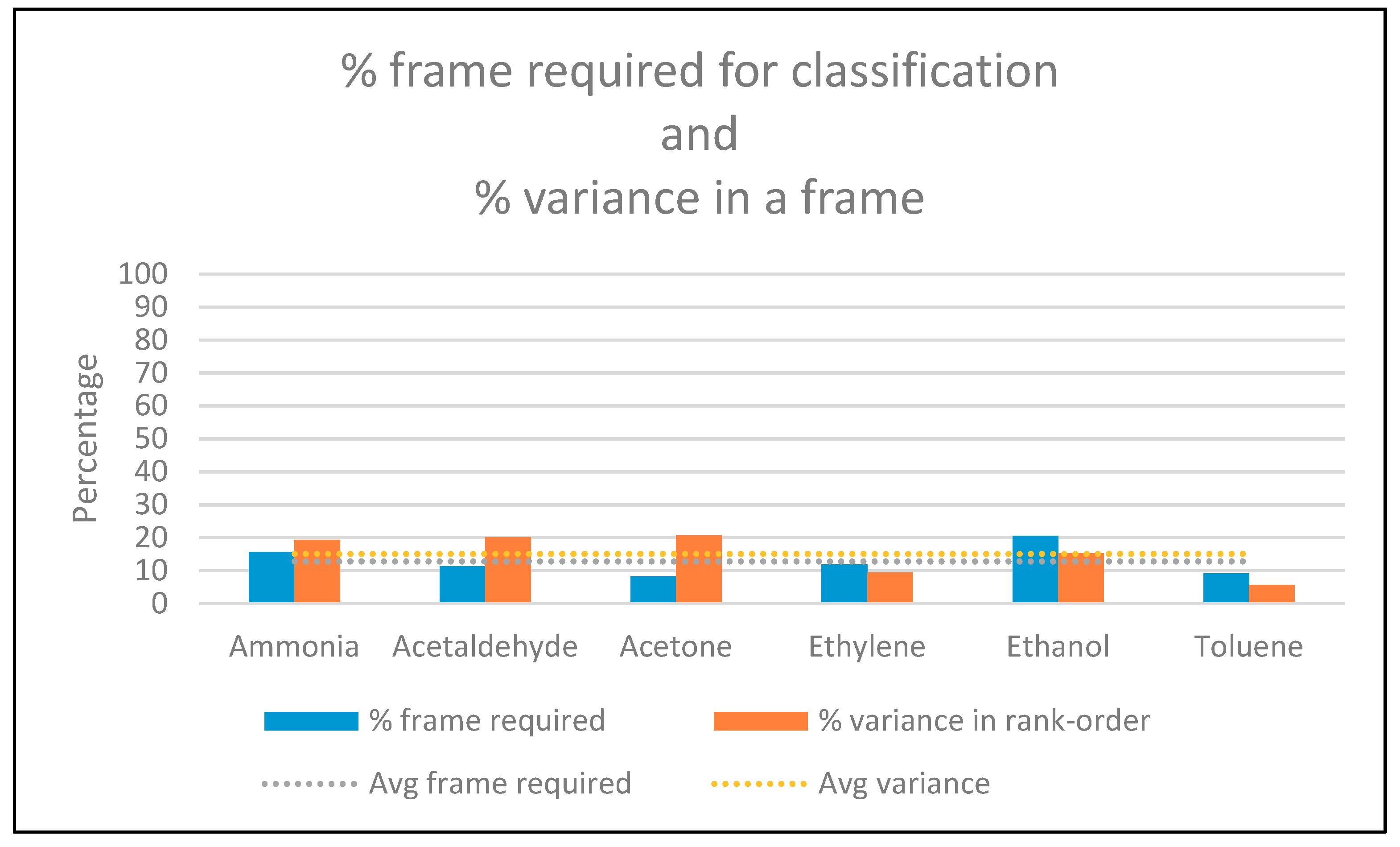
5.2. Classification Results
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gutierrez, J.; Horrillo, M.C. Advances in Artificial Olfaction: Sensors and Applications. Talanta 2014, 124, 95–105. [Google Scholar] [CrossRef] [PubMed]
- Smith, L.S. Neuromorphic Systems: Past, Present and Future. In Brain Inspired Cognitive Systems 2008; Hussain, A., Aleksander, I., Smith, L.S., Barros, A.K., Chrisley, R., Cutsuridis, V., Eds.; Springer: New York, NY, USA, 2010; pp. 167–182. [Google Scholar]
- Chicca, E.; Schmuker, M.; Nawrot, M. Neuromorphic Sensors, Olfaction. In Encyclopedia of Computational Neuroscience; Jaeger, D., Jung, R., Eds.; Springer: New York, NY, USA, 2013; pp. 1–7. [Google Scholar]
- Pearce, T.C. Computational Parallels between the Biological Olfactory Pathway and its Analogue ‘the Electronic Nose’: Part I. Biological Olfaction. Biosystems 1997, 41, 43–67. [Google Scholar] [CrossRef]
- Vanarse, A.; Osseiran, A.; Rassau, A. An Investigation into Spike-Based Neuromorphic Approaches for Artificial Olfactory Systems. Sensors (Basel) 2017, 17, 2591. [Google Scholar] [CrossRef]
- Del Valle, M. Bioinspired Sensor Systems. Sensors (Basel) 2011, 11, 10180–10186. [Google Scholar] [CrossRef] [PubMed]
- Vanarse, A.; Osseiran, A.; Rassau, A. A Review of Current Neuromorphic Approaches for Vision, Auditory, and Olfactory Sensors. Front. Neurosci. 2016, 10. [Google Scholar] [CrossRef] [PubMed]
- Koickal, T.J.; Hamilton, A.; Tan, S.L.; Covington, J.A.; Gardner, J.W.; Pearce, T.C. Analog Vlsi Circuit Implementation of an Adaptive Neuromorphic Olfaction Chip. IEEE Trans. Circuits Syst. I Regul. Pap. 2007, 54, 60–73. [Google Scholar] [CrossRef]
- Bernabei, M.; Persaud, K.C.; Pantalei, S.; Zampetti, E.; Beccherelli, R. Large-Scale Chemical Sensor Array Testing Biological Olfaction Concepts. IEEE Sens. J. 2012, 12, 3174–3183. [Google Scholar] [CrossRef]
- Imam, N.; Cleland, T.A.; Manohar, R.; Merolla, P.A.; Arthur, J.V.; Akopyan, F.; Modha, D.S. Implementation of Olfactory Bulb Glomerular-Layer Computations in a Digital Neurosynaptic Core. Front. Neurosci. 2012, 6. [Google Scholar] [CrossRef]
- Kasap, B.; Schmuker, M. In Improving Odor Classification through Self-Organized Lateral Inhibition in a Spiking Olfaction-Inspired Network. In Proceedings of the 2013 6th International IEEE/EMBS Conference on Neural Engineering (NER), San Diego, CA, USA, 6–8 November 2013; IEEE: Washington, DC, USA, 2013; pp. 219–222. [Google Scholar]
- Schmuker, M.; Pfeil, T.; Nawrot, M.P. A Neuromorphic Network for Generic Multivariate Data Classification. Proc. Natl. Acad. Sci. USA 2014, 111, 2081–2086. [Google Scholar] [CrossRef] [PubMed]
- Hung Tat, C.; Kwan Ting, N.; Bermak, A.; Law, M.K.; Martinez, D. Spike Latency Coding in Biologically Inspired Microelectronic Nose. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 160–168. [Google Scholar]
- Ng, K.T.; Boussaid, F.; Bermak, A. A Cmos Single-Chip Gas Recognition Circuit for Metal Oxide Gas Sensor Arrays. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 1569–1580. [Google Scholar] [CrossRef]
- Yamani, J.A.; Boussaid, F.; Bermak, A.; Martinez, D. Glomerular Latency Coding in Artificial Olfaction. Front. Neuroeng. 2011, 4. [Google Scholar] [CrossRef] [PubMed]
- Yamani, J.H.J.A.; Boussaid, F.; Bermak, A.; Martinez, D. Bio-Inspired Gas Recognition Based on the Organization of the Olfactory Pathway. In Proceedings of the 2012 IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012; IEEE: Washington, DC, USA, 2012; pp. 1391–1394. [Google Scholar]
- Hassan, M.; Brahim Belhaouari, S.; Bermak, A. Probabilistic Rank Score Coding: A robust Rank-Order Based Classifier for Electronic Nose Applications. IEEE Sens. J. 2015, 15, 3934–3946. [Google Scholar] [CrossRef]
- Huang, P.C.; Rabaey, J.M. A Bio-Inspired Analog Gas Sensing Front End. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 2611–2623. [Google Scholar] [CrossRef]
- Far, A.B.; Flitti, F.; Guo, B.; Bermak, A. A Bio-Inspired Pattern Recognition System for Tin-Oxide Gas Sensor Applications. IEEE Sens. J. 2009, 9, 713–722. [Google Scholar] [CrossRef]
- Vergara, A.; Vembu, S.; Ayhan, T.; Ryan, M.A.; Homer, M.L.; Huerta, R. Chemical Gas Sensor Drift Compensation Using Classifier Ensembles. Sens. Actuators B Chem. 2012, 166, 320–329. [Google Scholar] [CrossRef]
- Thorpe, S.; Gautrais, J. Rank order coding. In Computational Neuroscience: Trends in Research, 1998; Bower, J.M., Ed.; Springer: Boston, MA, USA, 1998; pp. 113–118. [Google Scholar]
- Delorme, A.; Perrinet, L.; Thorpe, S.J. Networks of Integrate-And-Fire Neurons Using Rank Order Coding b: Spike Timing Dependent Plasticity and Emergence of Orientation Selectivity. Neurocomputing 2001, 38, 539–545. [Google Scholar] [CrossRef]
- Thorpe, S.; Delorme, A.; Van Rullen, R. Spike-Based Strategies for Rapid Processing. Neural Netw. 2001, 14, 715–725. [Google Scholar] [CrossRef]
- Martinez, D.; Rochel, O.; Hugues, E. A Biomimetic Robot for Tracking Specific Odors in Turbulent Plumes. Auton. Robots 2006, 20, 185–195. [Google Scholar] [CrossRef]
- Bermak, A.; Hassan, M.; Pan, X. Artificial olfactory systems. In Handbook of Biochips: Integrated Circuits and Systems for Biology and Medicine; Sawan, M., Ed.; Springer: New York, NY, USA, 2015; pp. 1–20. [Google Scholar]
- Huang, P.-C.; Rabaey, J.M. A Neuro-Inspired Spike Pattern Classifier. IEEE J. Emerg. Sel. Top. Circuits Syst. 2018, 8, 555–565. [Google Scholar] [CrossRef]
- General Vision Inc. Braincard, Low-Power, Trainable Pattern Recognition for Iot; General Vision Inc.: Petaluma, CA, USA, 2017. [Google Scholar]
- Generral Vision Inc. Neuromem Technology Reference Guide; Generral Vision Inc.: Petaluma, CA, USA, 2018. [Google Scholar]
- Wasilewski, T.; Gebicki, J.; Kamysz, W. Bioelectronic Nose: Current Status and Perspectives. Biosens. Bioelectron. 2017, 87, 480–494. [Google Scholar] [CrossRef] [PubMed]
- Climent, E.; Pelegri-Sebastia, J.; Sogorb, T.; Talens, J.B.; Chilo, J. Development of the Moosy4 Enose Iot for Sulphur-Based Voc Water Pollution Detection. Sensors (Basel) 2017, 17, 1917. [Google Scholar] [CrossRef]
- Cole, M.; Covington, J.A.; Gardner, J.W. Combined Electronic Nose and Tongue for a Flavour Sensing System. Sens. Actuators B Chem. 2011, 156, 832–839. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analytes | Concentrations (ppmv) | Samples |
|---|---|---|
| Ammonia | 50, 75, 100, 125, 150, 175, 200, 225, 250, 275 | 55 |
| Acetaldehyde | 50, 75, 100, 125, 150, 175, 200, 225, 250, 275, 300 | 23 |
| Acetone | 150, 200, 250, 300, 350, 400, 450, 500 | 40 |
| Ethylene | 50, 75, 100, 125, 150, 175, 200, 225, 250, 275 | 64 |
| Ethanol | 50, 75, 100, 125, 150, 175, 200, 225, 250, 275, 300 | 46 |
| Toluene | 20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75 | 57 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vanarse, A.; Osseiran, A.; Rassau, A. Real-Time Classification of Multivariate Olfaction Data Using Spiking Neural Networks. Sensors 2019, 19, 1841. https://doi.org/10.3390/s19081841
Vanarse A, Osseiran A, Rassau A. Real-Time Classification of Multivariate Olfaction Data Using Spiking Neural Networks. Sensors. 2019; 19(8):1841. https://doi.org/10.3390/s19081841
Chicago/Turabian StyleVanarse, Anup, Adam Osseiran, and Alexander Rassau. 2019. "Real-Time Classification of Multivariate Olfaction Data Using Spiking Neural Networks" Sensors 19, no. 8: 1841. https://doi.org/10.3390/s19081841
APA StyleVanarse, A., Osseiran, A., & Rassau, A. (2019). Real-Time Classification of Multivariate Olfaction Data Using Spiking Neural Networks. Sensors, 19(8), 1841. https://doi.org/10.3390/s19081841