Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems

 , , , and
, , , and
Abstract
1. Introduction
- To what extent do the different configurations bias measurements?
- How does incoming solar radiation and the angle relative to the oncoming wind affect observations?
- Do the benefits to data quality (if any) using a fan offset the reduced flight time from additional weight and power consumption?
2. Materials and Methods
2.1. CopterSonde
2.2. Sensor Placement
2.3. Field Experiments
2.4. Analysis Techniques
3. Results
3.1. Differences between Shield and Scoop
3.2. Effects from Solar Radiation
3.3. Effects from Wind Direction
4. Discussion
5. Conclusions
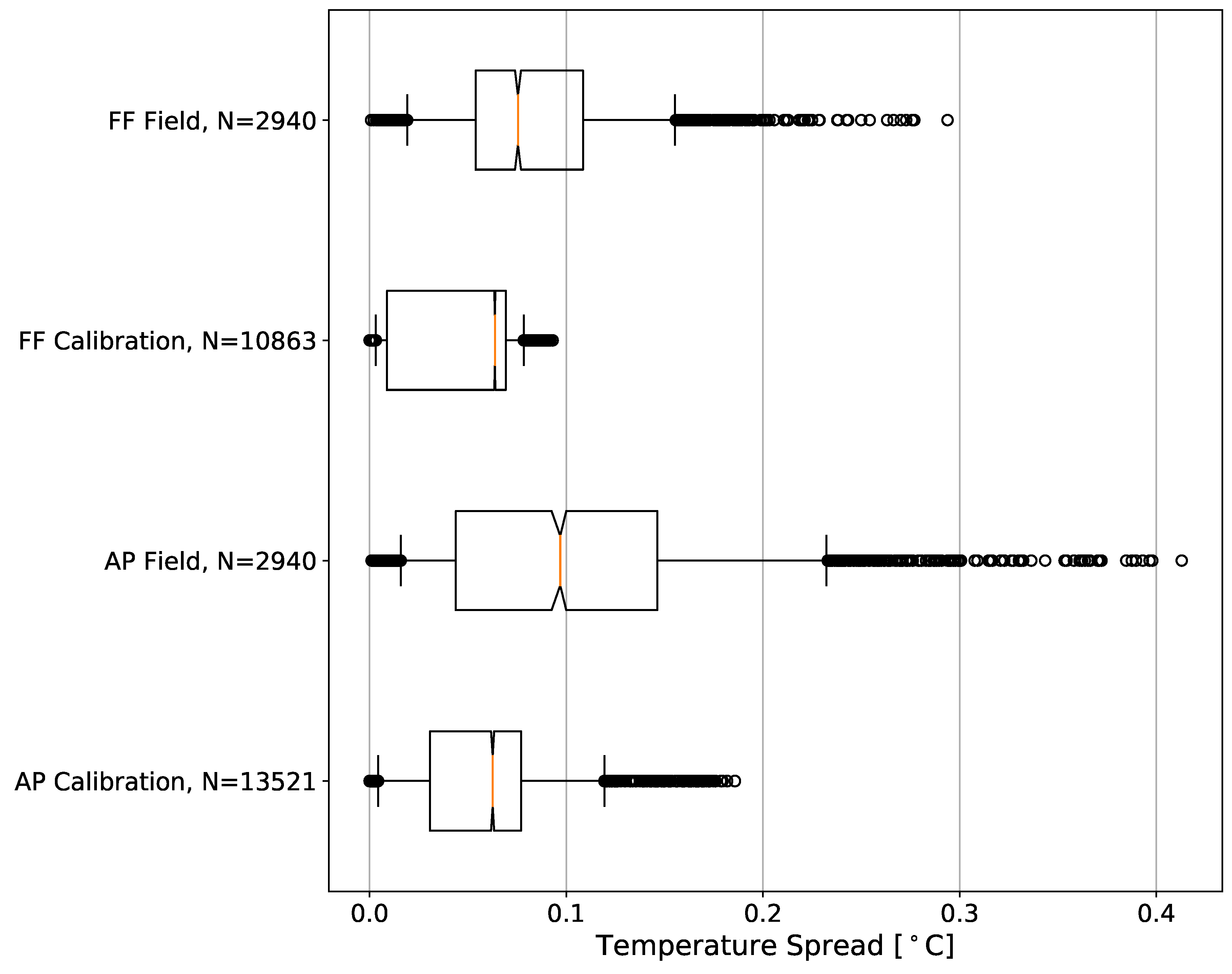
- In general, the atmospheric measurements obtained from thermistors in the FF configuration exhibit higher precision and accuracy than those in the AP. These differences are statistically significant, although the overall variances from both configurations are still relatively small from a data quality standpoint.
- Solar radiation can bias sensors appreciably when not properly shielded, with MDs greater than 0.20 C. The orientation of the rwUAS with respect to the ambient wind can also bias measurements when non-environmental heat sources (e.g., motor heat, frictional heating on the propeller, and heat on the main body when exposed to direct sunlight) propagate towards the downstream temperature sensors.
- Overall, the FF configuration is less susceptible to environmental influences than the AP configuration, which has been demonstrated both statistically and on a case-by-case basis. The impact on flight time from the added weight and power consumption of a ducted fan has proven to be less significant than expected with the current operational version of the CopterSonde, which has only been limited in maximum altitude by visual line-of-sight restrictions. When the resources allow, the authors recommend implementing the ducted fan setup for collecting thermodynamic observations with an rwUAS. Otherwise, it is imperative to be cognizant of the potential biases introduced when aspirating sensors with propeller wash.
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| UAS | Unmanned Aircraft System |
| RPAS | Remotely Piloted Aircraft System |
| rwUAS | Rotary-Wing Unmanned Aircraft System |
| fwUAS | Fixed-Wing Unmanned Aircraft System |
| CBL | Convective Boundary Layer |
| AP | Arm Propeller sensor configuration |
| FF | Front Fan sensor configuration |
| KAEFS | Kessler Atmospheric and Ecological Field Station |
| MD | Mean of absolute Differences |
| CFD | Computational Fluid Dynamics |
| CAD | Computer-Aided Design |
References
- National Research Council. Earth Science and Applications from Space: National Imperatives for the Next Decade and Beyond; National Academies Press: Washington, DC, USA, 2007; p. 456. [Google Scholar]
- National Research Council. Observing Weather and Climate From the Ground Up: A Nationwide Network of Networks; National Academies Press: Washington, DC, USA, 2009. [Google Scholar]
- Reuder, J.; Brisset, P.; Jonassen, M.; Müller, M.; Mayer, S. The Small Unmanned Meteorological Observer SUMO: A new tool for atmospheric boundary layer research. Meteorol. Z. 2009, 18, 141–147. [Google Scholar] [CrossRef]
- Houston, A.L.; Argrow, B.; Elston, J.; Lahowetz, J.; Frew, E.W.; Kennedy, P.C. The Collaborative Colorado–Nebraska Unmanned Aircraft System Experiment. Bull. Am. Meteorol. Soc. 2012, 93, 39–54. [Google Scholar] [CrossRef]
- Mayer, S.; Sandvik, A.; Jonassen, M.O.; Reuder, J. Atmospheric profiling with the UAS SUMO: A new perspective for the evaluation of fine-scale atmospheric models. Meteorol. Atmos. Phys. 2012, 116, 15–26. [Google Scholar] [CrossRef]
- Lothon, M.; Lohou, F.; Pino, D.; Couvreux, F.; Pardyjak, E.; Reuder, J.; Vilà-Guerau De Arellano, J.; Durand, P.; Hartogensis, O.; Legain, D.; et al. The BLLAST field experiment: Boundary-layer late afternoon and sunset turbulence. Atmos. Chem. Phys. 2014, 14, 10931–10960. [Google Scholar] [CrossRef]
- Wildmann, N.; Hofsäß, M.; Weimer, F.; Joos, A.; Bange, J. MASC-a small remotely piloted aircraft (RPA) for wind energy research. Adv. Sci. Res. 2014, 11, 55. [Google Scholar] [CrossRef]
- Båserud, L.; Reuder, J.; Jonassen, M.O.; Kral, S.T.; Paskyabi, M.B.; Lothon, M. Proof of concept for turbulence measurements with the RPAS SUMO during the BLLAST campaign. Atmos. Meas. Tech. 2016, 9, 4901. [Google Scholar] [CrossRef]
- de Boer, G.; Palo, S.; Argrow, B.; LoDolce, G.; Mack, J.; Gao, R.S.; Telg, H.; Trussel, C.; Fromm, J.; Long, C.N.; et al. The Pilatus unmanned aircraft system for lower atmospheric research. Atmos. Meas. Tech. 2016, 9, 1845–1857. [Google Scholar] [CrossRef]
- Bailey, S.C.C.; Witte, B.M.; Schlagenhauf, C.; Greene, B.R.; Chilson, P.B. Measurement of High Reynolds Number Turbulence in the Atmospheric Boundary Layer Using Unmanned Aerial Vehicles. In Proceedings of the Tenth International Symposium on Turbulence and Shear Flow Phenomena, Chicago, IL, USA, 6–9 July 2017; Volume 10. [Google Scholar]
- Vömel, H.; Argrow, B.M.; Axisa, D.; Chilson, P.; Ellis, S.; Fladeland, M.; Frew, E.W.; Jacob, J.; Lord, M.; Moore, J.; et al. The NCAR / EOL Community Workshop on Unmanned Aircraft Systems for Atmospheric Research. UCAR/NCAR Earth Obs. Lab. 2018. [Google Scholar] [CrossRef]
- Koch, S.E.; Fengler, M.; Chilson, P.B.; Elmore, K.L.; Argrow, B.; David, L.; Andra, J.; Lindley, T. Unmanned Aircraft Sampling of the Pre-Convective Boundary Layer. J. Atmos. Ocean. Technol. 2018. Accepted. [Google Scholar] [CrossRef]
- Jacob, J.; Chilson, P.; Houston, A.; Smith, S. Considerations for atmospheric measurements with small unmanned Aircraft systems. Atmosphere 2018, 9, 252. [Google Scholar] [CrossRef]
- Saïd, F.; Corsmeier, U.; Kalthoff, N.; Kottmeier, C.; Lothon, M.; Wieser, A.; Hofherr, T.; Perros, P. ESCOMPTE experiment: Intercomparison of four aircraft dynamical, thermodynamical, radiation and chemical measurements. Atmos. Res. 2005, 74, 217–252. [Google Scholar] [CrossRef]
- Gioli, B.; Miglietta, F.; Vaccari, F.P.; Zaldei, A.; De Martino, B. The Sky Arrow ERA, an innovative airborne platform to monitor mass, momentum and energy exchange of ecosystems. Ann. Geophys.-Italy 2006, 49. [Google Scholar] [CrossRef]
- van den Kroonenberg, A.C.; Martin, S.; Beyrich, F.; Bange, J. Spatially-averaged temperature structure parameter over a heterogeneous surface measured by an unmanned aerial vehicle. Bound.-Lay. Meteorol. 2012, 142, 55–77. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. A New Technique to Estimate Sensible Heat Fluxes around Micrometeorological Towers Using Small Unmanned Aircraft Systems. J. Atmos. Ocean. Technol. 2017, 34, 2103–2112. [Google Scholar] [CrossRef]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkermann, W.; Schäfer, K.; Emeis, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef]
- Greene, B.R. Boundary Layer Profiling Using Rotary-Wing Unmanned Aircraft Systems: Filling the Atmospheric Data Gap. Master’s Thesis, The University of Oklahoma, Norman, OK, USA, 2018. [Google Scholar]
- Kral, S.T.; Reuder, J.; Vihma, T.; Suomi, I.; O’Connor, E.; Kouznetsov, R.; Wrenger, B.; Rautenberg, A.; Urbancic, G.; Jonassen, M.O.; et al. Innovative Strategies for Observations in the Arctic Atmospheric Boundary Layer (ISOBAR)—The Hailuoto 2017 Campaign. Atmosphere 2018, 9. [Google Scholar] [CrossRef]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. On the Use of Rotary-Wing Aircraft to Sample Near-Surface Thermodynamic Fields: Results from Recent Field Campaigns. Sensors 2018, 19. [Google Scholar] [CrossRef] [PubMed]
- Neumann, P.P.; Bartholmai, M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sens. Actuat. A-Phys. 2015, 235, 300–310. [Google Scholar] [CrossRef]
- Tanner, B.D.; Swiatek, E.; Maughan, C. Field comparisons of naturally ventilated and aspirated radiation shields for weather station air temperature measurements. In Proceedings of the Conference on Agricultural and Forest Meteorology, Atlanta, GA, USA, 28 January–2 February 1996; Volume 22, pp. 227–230. [Google Scholar]
- Richardson, S.J.; Brock, F.V.; Semmer, S.R.; Jirak, C. Minimizing errors associated with multiplate radiation shields. J. Atmos. Ocean. Technol. 1999, 16, 1862–1872. [Google Scholar] [CrossRef]
- Hubbard, K.; Lin, X.; Baker, C.; Sun, B. Air temperature comparison between the MMTS and the USCRN temperature systems. J. Atmos. Ocean. Technol. 2004, 21, 1590–1597. [Google Scholar] [CrossRef]
- Brock, F.V.; Crawford, K.C.; Elliott, R.L.; Cuperus, G.W.; Stadler, S.J.; Johnson, H.L.; Eilts, M.D. The Oklahoma Mesonet: A technical overview. J. Atmos. Ocean. Technol. 1995, 12, 5–19. [Google Scholar] [CrossRef]
- McPherson, R.A.; Fiebrich, C.A.; Crawford, K.C.; Kilby, J.R.; Grimsley, D.L.; Martinez, J.E.; Basara, J.B.; Illston, B.G.; Morris, D.A.; Kloesel, K.A.; et al. Statewide monitoring of the mesoscale environment: A technical update on the Oklahoma Mesonet. J. Atmos. Ocean. Technol. 2007, 24, 301–321. [Google Scholar] [CrossRef]
- Fiebrich, C.A.; Crawford, K.C. Automation: A Step toward Improving the Quality of Daily Temperature Data Produced by Climate Observing Networks. J. Atmos. Ocean. Technol. 2009, 26, 1246–1260. [Google Scholar] [CrossRef]
- Nash, J.; Oakley, T.; Vömel, H.; Wei, L. WMO Intercomparison of High Quality Radiosonde Systems, Yangjiang, China, 12 July–3 August 2010; IOM Report 107; World Meteorological Organization: Geneva, Switzerland, 2011; p. 248. [Google Scholar]
- Jensen, M.P.; Holdridge, D.J.; Survo, P.; Lehtinen, R.; Baxter, S.; Toto, T.; Johnson, K.L. Comparison of Vaisala radiosondes RS41 and RS92 at the ARM Southern Great Plains site. Atmos. Meas. Tech. 2016, 9, 3115–3129. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef]
- Fan, L.; Chen, G.; Yu, F.; Liu, Y.; Li, L. A Correction Method for UAV Helicopter Airborne Temperature and Humidity Sensor. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Jung, M.K.; Kwon, O.J. Numerical study of aerodynamic performance of a multirotor unmanned-aerial-vehicle configuration. J. Aircr. 2014, 52, 839–846. [Google Scholar] [CrossRef]
- Houston, A.L.; Keeler, J.M. The Impact of Sensor Response and Airspeed on the Representation of the Convective Boundary Layer and Airmass Boundaries by Small Unmanned Aircraft Systems. J. Atmos. Ocean. Technol. 2018, 35, 1687–1699. [Google Scholar] [CrossRef]
- Hardesty, R.M.; Hoff, R.M. Thermodynamic Profiling Technologies Workshop Report to the National Science Foundation and the National Weather Service; Technical Report NCAR/TN-488+STR; National Center for Atmospheric Research: Boulder, CO, USA, 2012. [Google Scholar]
- Kaimal, J.C.; Wyngaard, J.C.; Haugen, D.A.; Coté, O.R.; Izumi, Y.; Caughey, S.J.; Readings, C.J. Turbulence Structure in the Convective Boundary Layer. J. Atmos. Sci. 1976, 33, 2152–2169. [Google Scholar] [CrossRef]
- Stull, R. An Introduction to Boundary Layer Meteorology, 9th ed.; Springer Nature: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Li, B.; Avissar, R. The Impact of Spatial Variability of Land-Surface Characteristics on Land-Surface Heat Fluxes. J. Clim. 1994, 7, 527–537. [Google Scholar] [CrossRef]
- Wilks, D. Statistical Methods in the Atmospheric Sciences, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2011; Volume 100. [Google Scholar]
- Waugh, S.; Fredrickson, S. An improved aspirated temperature system for mobile meteorological observations, especially in severe weather. In Proceedings of the 25th Conference on Severe Local Storms, Denver, CO, USA, 11–14 October 2010. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Sensor Model | Location and Aspiration | Solar Protection |
|---|---|---|---|
| Front Fan | iMet-XF | Ducted Fan | Plastic L-duct |
| (FF) | PT 100 | Ducted Fan | |
| Left Arm Propeller | iMet-XF | Left Front Arm | Cylindrical Plastic Shield |
| (LAP) | PT 100 | Propeller Wash | |
| Right Arm Propeller | iMet-XF | Right Front Arm | Cylindrical Plastic Shield |
| (RAP) | PT 100 | Propeller Wash | |
| Mesonet | RM Young 41342 | Mesonet Tower at 9 m | 10-plate Radiation Shield |
| (Meso9m) | Platinum RTD | Ambient Wind |
| Flight # | Wind Estimator | Heading | Orientation | Sky Cover |
|---|---|---|---|---|
| 1 | On | S | Into wind | Sunny then mostly cloudy |
| 2 | Off | E | Away from sun | Mostly cloudy then sunny |
| 3 | On | S | Into wind | Mostly sunny |
| 4 | Off | E | Away from sun | Mostly cloudy |
| 5 | On | S | Into wind | Clear |
| 6 | Off | W | Into sun | Clear |
| 7 | Off | W | Into sun | Clear |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors 2019, 19, 1470. https://doi.org/10.3390/s19061470
Greene BR, Segales AR, Bell TM, Pillar-Little EA, Chilson PB. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors. 2019; 19(6):1470. https://doi.org/10.3390/s19061470
Chicago/Turabian StyleGreene, Brian R., Antonio R. Segales, Tyler M. Bell, Elizabeth A. Pillar-Little, and Phillip B. Chilson. 2019. "Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems" Sensors 19, no. 6: 1470. https://doi.org/10.3390/s19061470
APA StyleGreene, B. R., Segales, A. R., Bell, T. M., Pillar-Little, E. A., & Chilson, P. B. (2019). Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors, 19(6), 1470. https://doi.org/10.3390/s19061470