Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks



Abstract
1. Introduction
2. The Proposed Protocol to Relocate Hopping Sensors
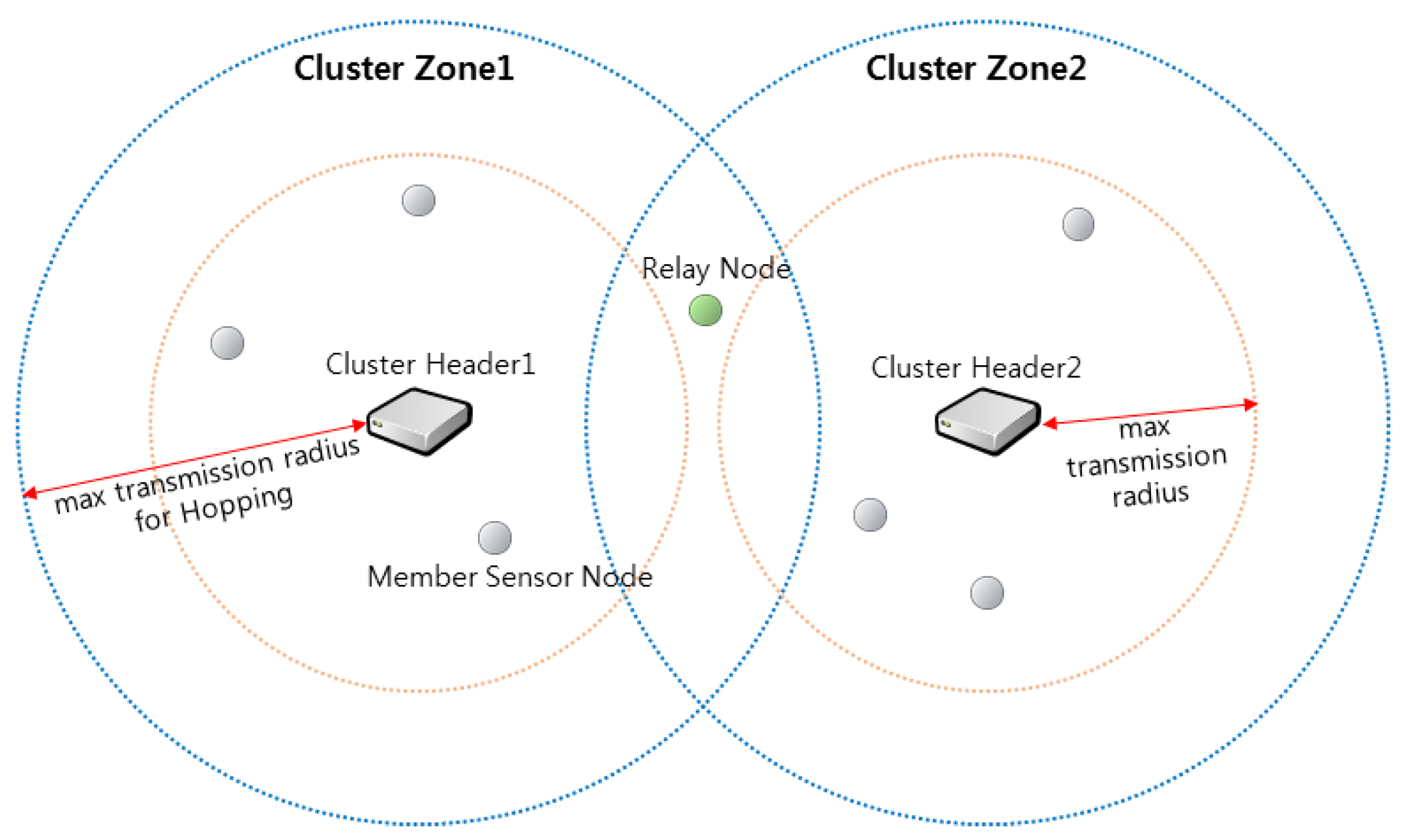
2.1. Characteristics and Assumptions of Hopping Sensors
2.2. Components and Brief Descriptions of the Proposed Protocol
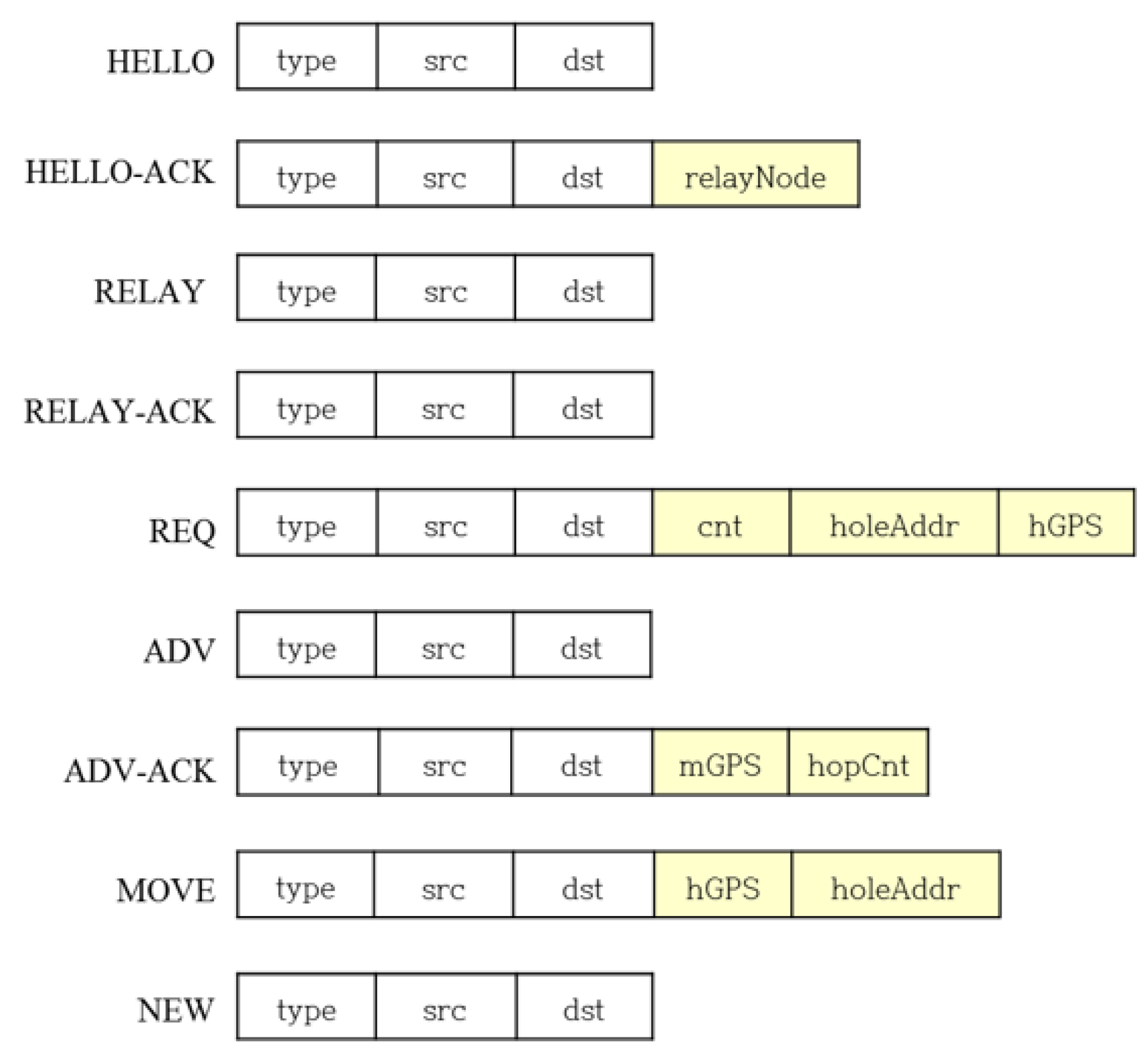
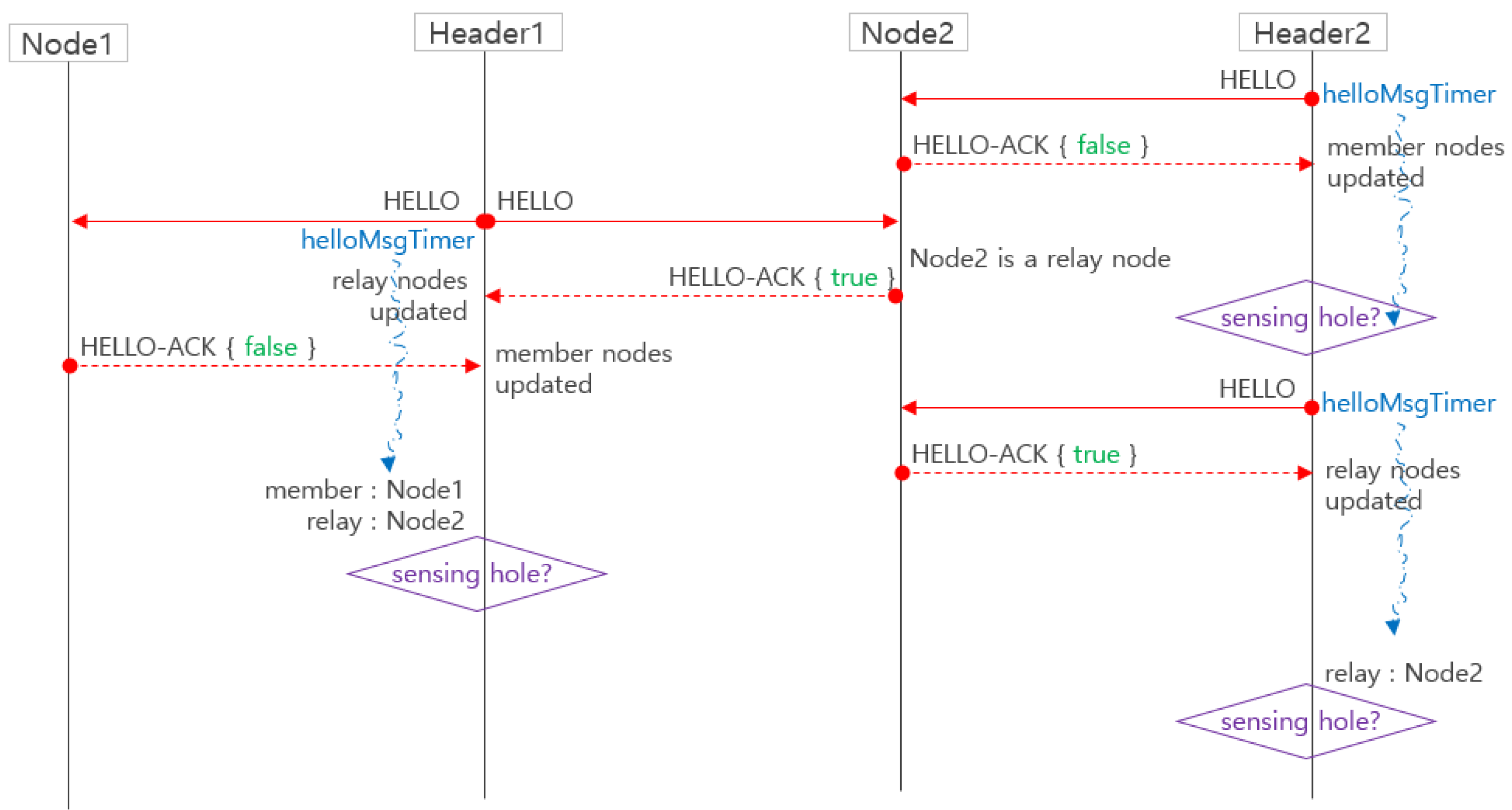
- HELLO message: The cluster header periodically (using “helloMsgTimer”) broadcasts a HELLO message to identify its member sensor nodes. The member sensor node receiving HELLO checks the address of the HELLO transmitted (src) and registers it as its own cluster header. Also, if there are more than two registered addresses, the member sensor node becomes a relay node.
- ·
- type: HELLO
- ·
- src: The address of the header node that sends HELLO
- ·
- dst: Broadcast address
- HELLO-ACK message: In response to HELLO, the member sensor node receiving the HELLO message transmits HELLO-ACK to its cluster header.
- ·
- type: HELLO-ACK
- ·
- src: The address of the member sensor node transmitting the HELLO-ACK
- ·
- dst: src of HELLO message received
- ·
- relayNode: Set to “true” if the sensor node transmitting the HELLO-ACK is a relay node; otherwise, set to “false”.
- helloMsgTimer: The cluster header executes the timer helloMsgTimer for a predetermined time by itself after the HELLO transmission. When the timer expires, the cluster header computes the number of its member nodes using HELLO-ACKs, and if the member nodes number is less than a certain number, it can determine that its zone could be a sensing hole. It periodically broadcasts HELLO for sensing hole identification and executes the timer helloMsgTimer again.
- RELAY message: If the member sensor node of the header is insufficient (i.e., a sensing hole), the header broadcasts a RELAY message to all its relay nodes.
- ·
- type: RELAY
- ·
- src: The address of the header that sends the RELAY message
- ·
- dst: Broadcast address
- RELAY-ACK message: The relay node sends a RELAY-ACK response message to the cluster header that sent the RELAY.
- ·
- type: RELAY-ACK
- ·
- src: The address of relay node sending RELAY-ACK
- ·
- dst: src of RELAY message received
- REQ (Request) message: The REQ is a message that the cluster header, in which the sensing hole occurs, requests a relocation of the member sensor nodes to neighboring cluster zones. The cluster header of the sensing hole transmits a REQ message to the relay node using the first received RELAY-ACK. The relay node that receives the REQ transmits the REQ to any one of the cluster headers that is not the sending address (src) of the received REQ among the cluster headers of the relay node. After a cluster header of the sensing hole transmits a REQ, if the cluster header receives a RELAY-ACK from another relay node, the newly received RELAY-ACK is ignored.
- ·
- type: REQ
- ·
- src: The address of the header of the sensing hole that transmits the REQ or the address of the relay node when forwarding REQ
- ·
- dst: src of the RELAY-ACK received or the address of the cluster header of the relay node when it forwards REQ message
- ·
- cnt: Number of member sensor nodes required in the sensing hole
- ·
- holeAddr: The address of the header where the sensing hole occurred
- ·
- hGPS: Location information of the sensing hole header
- ADV message: A cluster header neighboring a sensing hole and receiving the REQ broadcasts an ADV to its member sensor nodes.
- ·
- type: ADV
- ·
- src: The address of the cluster header that sends the ADV
- ·
- dst: Broadcast
- ADV-ACK message: The member sensor node that received the ADV sends its ADV-ACK including its position and the currently available number of hops to its cluster header. The relay node does not transmit ADV-ACK.
- ·
- type: ADV-ACK
- ·
- src: The address of the member sensor node that transmits the ADV-ACK
- ·
- dst: src of ACK message received
- ·
- mGPS: Location information of member sensor node
- ·
- hopCnt: The number of currently available hops (i.e., the residual energy which can be used for moving)
- MOVE message: The cluster header that receives the ADV-ACKs selects the movable nodes by referring to 1) currently available hops (residual energy) and 2) the geographical distance between the member sensor node and the cluster header where the sensing hole occurs. The header sends MOVE to the selected member sensor nodes. The member sensor node receiving the MOVE is relocated to the cluster zone where the sensing hole occurs.
- ·
- type: MOVE
- ·
- src: The address of the header that sends the MOVE
- ·
- dst: The address of the member sensor node selected for relocating
- ·
- hGPS: Location information of the sensing hole
- ·
- holeAddr: The address of the header where the sensing hole occurred
- NEW message: The member sensor node that moved to neighboring cluster zone sends the NEW message to a new cluster header. Upon receiving the HELLO message after a predetermined time (helloMsgTimer), the relocated member sensor node can determine whether it is a relay node by initializing its header nodes.
- ·
- type: NEW
- ·
- src: The address of the member sensor node sending the NEW message
- ·
- dst: The holeAddr of the MOVE message received
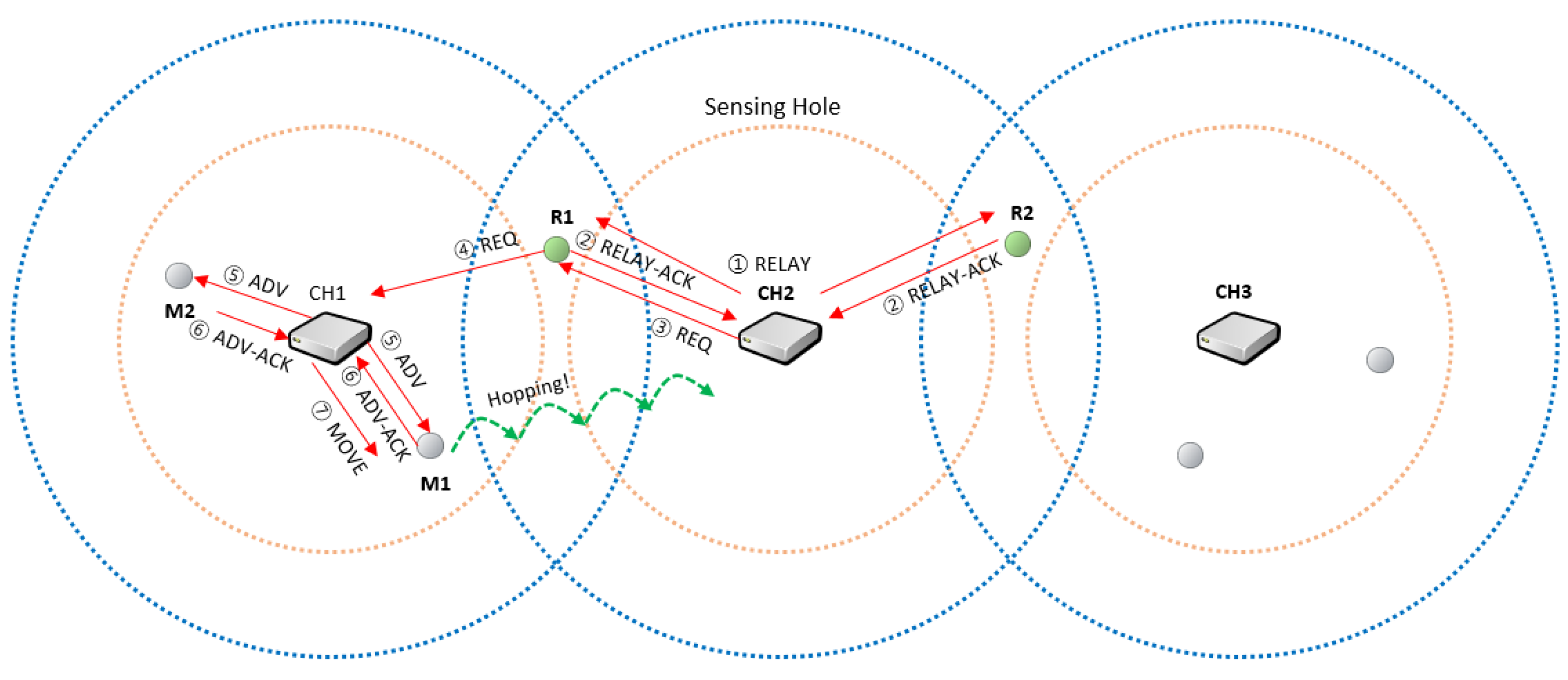
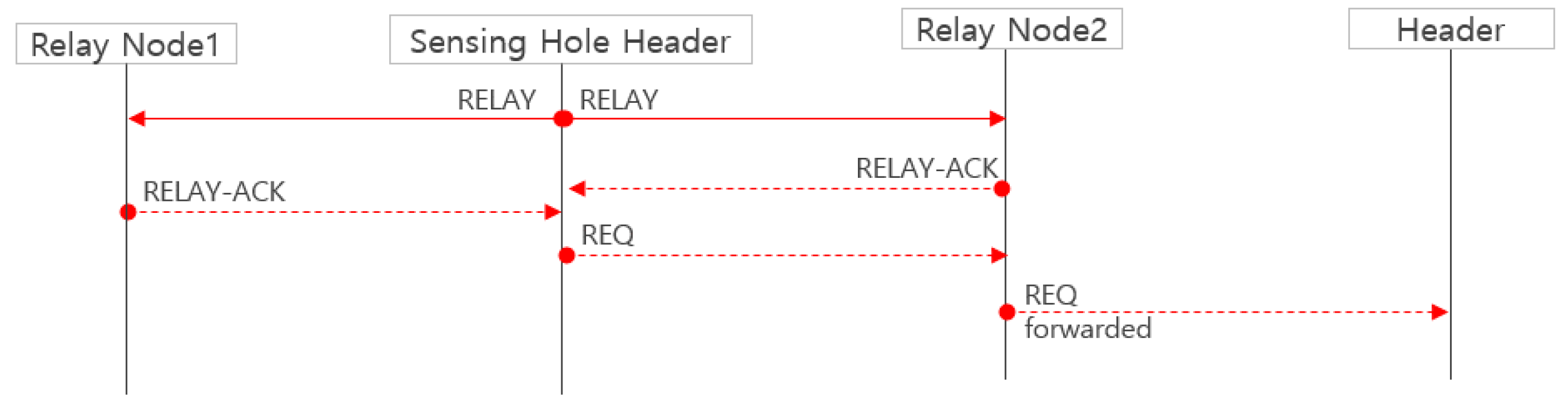
- The cluster header CH2 sends RELAY message to the relay nodes (R1, R2) to select the relay node to forward the message.
- Each relay node sends a reply message RELAY-ACK to the cluster header CH2 to indicate that it is possible to forward the request to the other cluster headers (CH1, CH3). In Figure 2, it is assumed that the RELAY-ACK of the node R1 first arrived at CH2. Therefore, another RELAY-ACK from the R2 node is ignored.
- The cluster header CH2 receives the response message RELAY-ACK from R1 and then requests at the node R1 that one sensor node is needed. At this time, the location information of the cluster header CH2 is included in the REQ message.
- Relay node R1 forwards the REQ, including the required number of hopping sensor nodes requested by CH2, to another cluster header CH1.
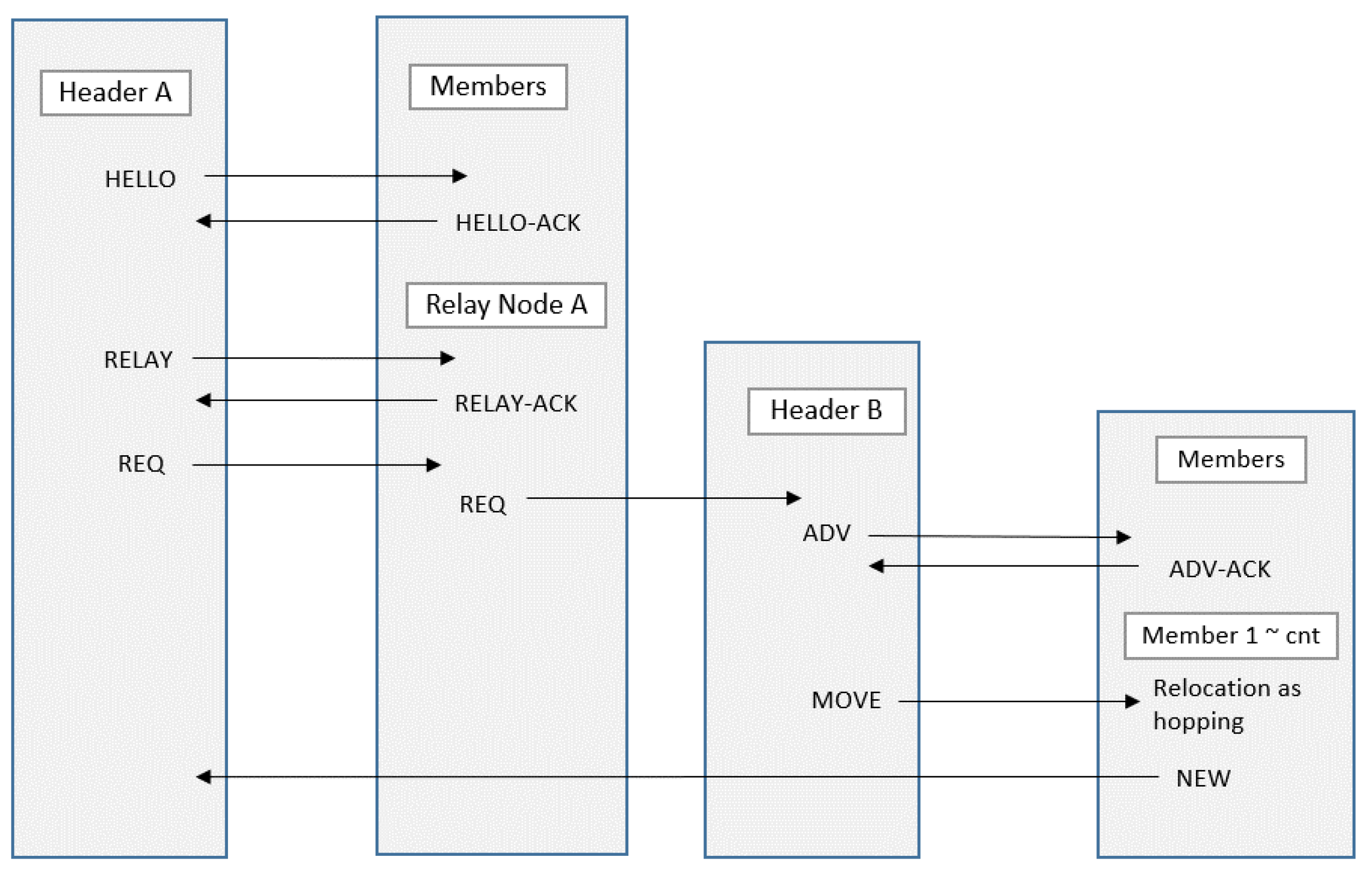
- The cluster header CH1 sends an ADV message to select the nodes to move from its zone to the neighbor cluster zone.
- Each member sensor node sends its location information and energy information, which are able to be used for moving, to its cluster header CH1.
- The header CH1 receives the response message from each member sensor node and then selects the movable member considering the position information of the cluster header CH2 and the information (location and energy) of the respective members. At this time, the energy of each member and the distance between a member and the neighboring cluster zone can be considered concurrently. Specifically, the cluster header obtains the value of the following function (1) f (node_i, w) for each member sensor node. The member having the maximum value will be selected as the node to be moved.
- 8.
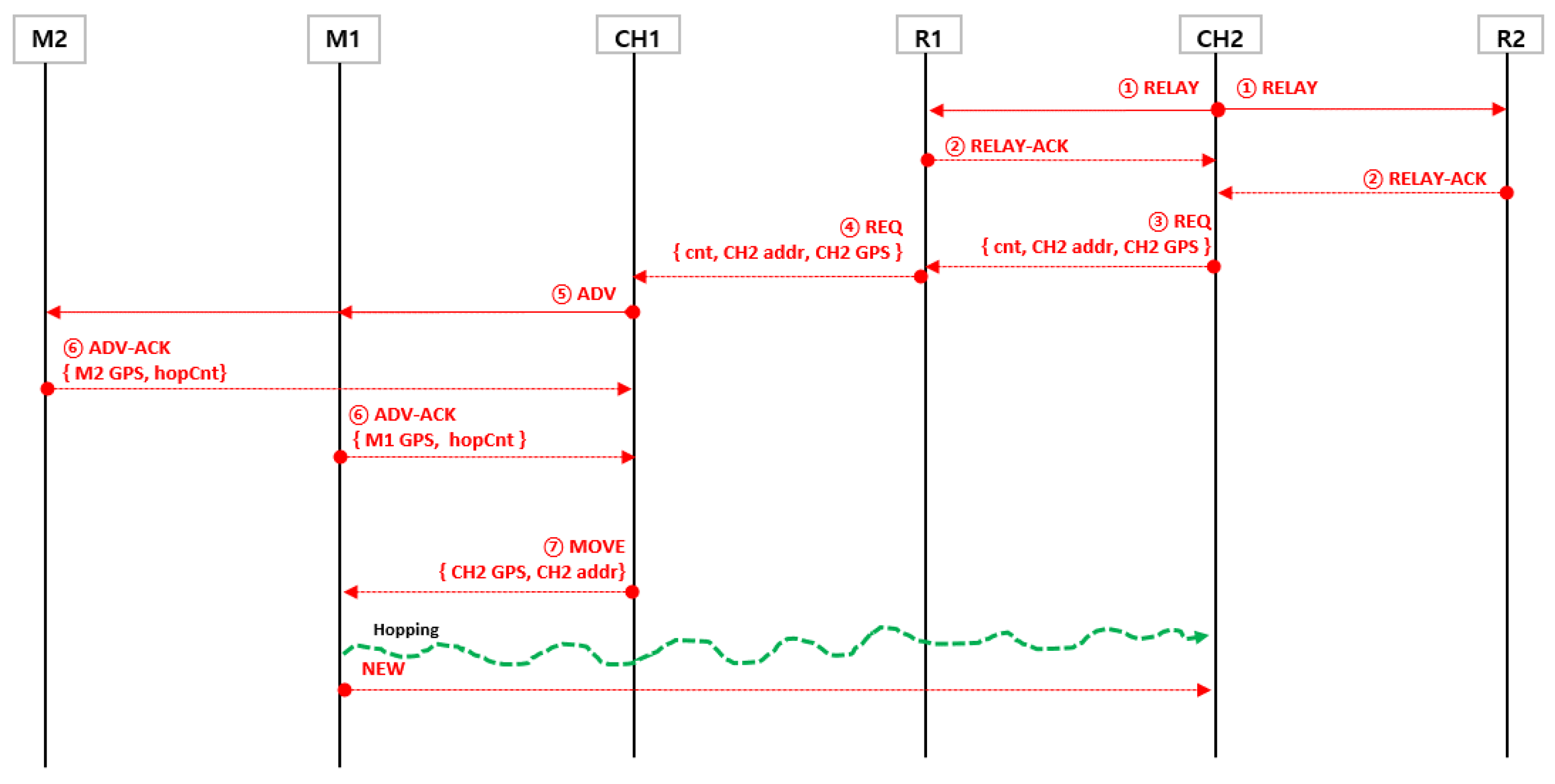
- The member sensor node M1 moves to the neighbor cluster and recovers the sensing hole. There is no need to communicate between sensor nodes while the member sensor node is moving. It only receives the relocation request from the current cluster header once and moves to the given coordinates without communication. After moving, communication with the new cluster header is resumed. Figure 5 illustrates the message flow for the example in Figure 4.
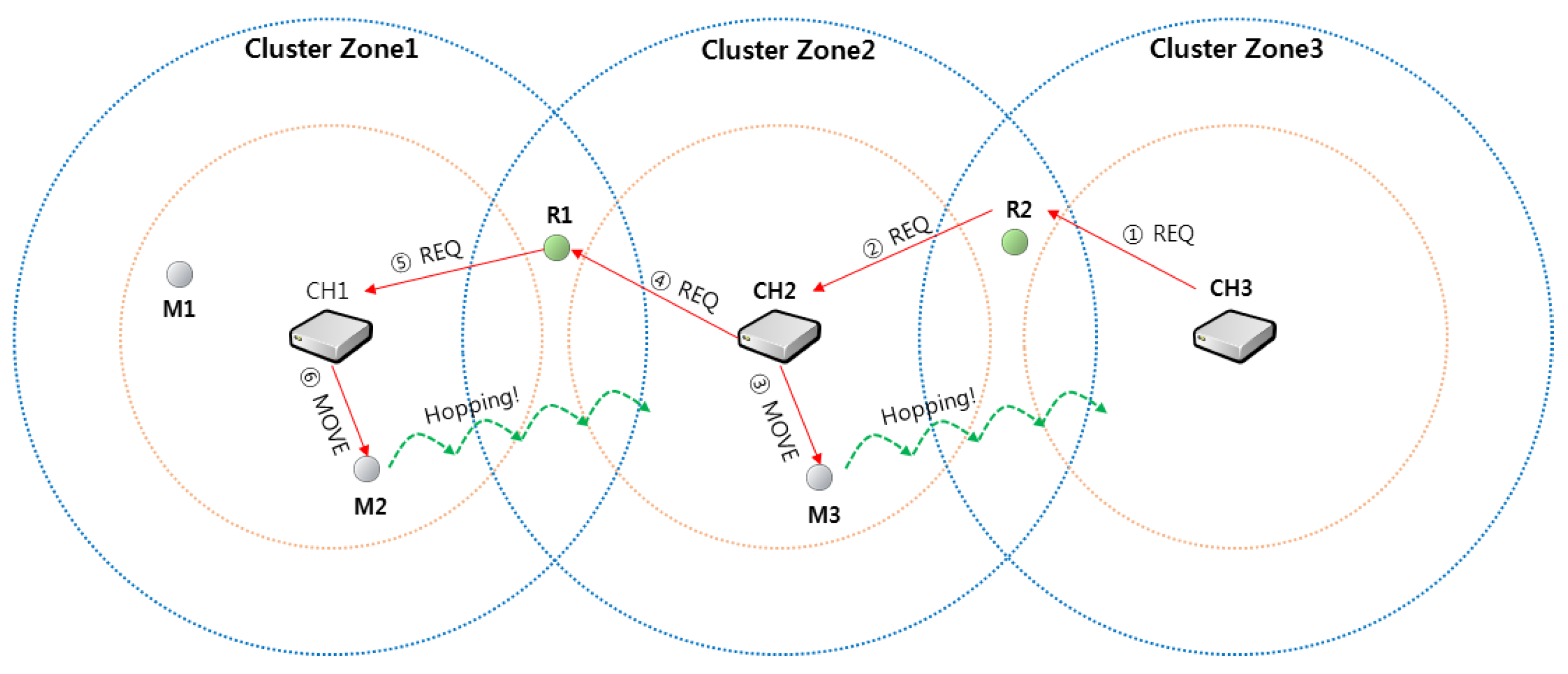
- Relay node R2 forwards the received message to the cluster header CH2 of cluster zone 2.
- Cluster header CH2 selects M3 as a movable sensor node in its own zone and sends a move command to cluster zone 3.
- The cluster header CH2 predicts that its zone may also be a sensing hole and sends a message requesting one sensor to relay node R1, sequentially.
- The relay node R1 delivers the message REQ to the cluster header CH1 like ②.
- Cluster header CH1 selects M2 among the sensor node members in its zone and commands M2 to move.
2.3. Basic Operation of Each Node-Specific Protocol for Sensing Hole Recovery
3. Simulation Results and Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, S.; Liu, M.; Dou, W.; Liu, X.; Zhou, S. Networking for Big Data: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 531–549. [Google Scholar] [CrossRef]
- Chen, M.; Mao, S.; Liu, Y. Big Data: A Survey. Mob. Netw. Appl. 2014, 19, 171–209. [Google Scholar] [CrossRef]
- Yaqoob, I.; Ahmed, E.; Hashem, I.A.T.; Ahmed, A.I.A.; Gani, A.; Imran, M.; Guizani, M. Internet of Things Architecture: Recent Advances, Taxonomy, Requirements, and Open Challenges. IEEE Wirel. Commun. 2017, 24, 10–16. [Google Scholar] [CrossRef]
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of Things for Disaster Management: State-of-the-Art and Prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef]
- Chudzikiewicz, J.; Furtak, J.; Zielinski, Z. Fault-tolerant techniques for the Internet of Military Things. In Proceedings of the IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 496–501. [Google Scholar]
- Kim, M.; Park, S.; Lee, W. A Robust Energy Saving Data Dissemination Protocol for IoT-WSNs. Ksii Trans. Internet Inf. Syst. (Tiis) 2018, 12, 5744–5764. [Google Scholar]
- Kim, M.; Jeong, E.; Bang, Y.-C.; Hwang, S.; Shin, C.; Jin, G.-J.; Kim, B. An Energy-aware Multipath Routing Algorithm in Wireless Sensor Networks. IEICE Trans. Inf. Syst. 2008, E91-D, 2419–2427. [Google Scholar] [CrossRef]
- Elappila, M.; Chinara, S.; Parhi, D.R. Survivable Path Routing in WSN for IoT applications. Pervasive Mob. Comput. 2018, 43, 49–63. [Google Scholar] [CrossRef]
- Kosar, R.; Onur, E.; Ersoy, C. Redeployment Based Sensing Hole Mitigation in Wireless Sensor Networks. In Proceedings of the IEEE 2009 Wireless Communications and Networking Conference (WCNC), Budapest, Hungary, 5–8 April 2009. [Google Scholar]
- Luo, R.C.; Huang, J.-T.; Chen, O. A Triangular Selection Path Planning Method with Dead Reckoning System for Wireless Mobile Sensor Mote. IEEE Icsmc 06 2006, 1, 162–168. [Google Scholar]
- Zhao, J.; Xu, J.; Gao, B.; Xi, N.; Cintrón, F.J.; Mutka, M.W.; Xiao, L. MSU Jumper: A Single-Motor-Actuated Miniature Steerable Jumping Robot. IEEE Trans. Robot. 2013, 29, 602–614. [Google Scholar] [CrossRef]
- Chellappan, S.; Snyder, M.E.; Thakur, M. Distributed exploratory coverage with limited mobility. Int. J. Space-Based Situated Comput. 2014, 4, 114–124. [Google Scholar] [CrossRef]
- Snyder, M.E. Foundations of Coverage Algorithms in Autonomic Mobile Sensor Networks. Ph.D. Thesis, Computer Science, Missouri University of Science and Technology, Rolla, MO, USA, 2014. [Google Scholar]
- Cen, Z.; Mutka, M.W. Relocation of Hopping Sensors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 08), Pasadena, CA, USA, 19–23 May 2008; pp. 569–574. [Google Scholar]
- Kim, M.; Mutka, M.W. Multipath-based Relocation Schemes Considering Balanced Assignment for Hopping Sensors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 09), Beijing, China, 9–15 October 2009; pp. 5095–5100. [Google Scholar]
- Kim, M.; Mutka, M.W. On Relocation of Hopping Sensors for Balanced Migration Distribution of Sensors. LNCS 2009, 5593, 361–371. [Google Scholar]
- Kim, M.; Mutka, M.W.; Choo, H. On Relocation of Hopping Sensors for Rugged Terrains. In Proceedings of the IEEE International Conference on Computational Sciences and Its Applications (ICCSA 10), Fukuoka, Japan, 23–26 March 2010; pp. 203–210. [Google Scholar]
- Cintron, F.; Pongaliur, K.; Mutka, M.W.; Xiao, L.; Zhao, J.; Xi, N. Leveraging height in a jumping sensor network to extend network coverage. IEEE Trans. Wirel. Commun. 2012, 11, 1840–1849. [Google Scholar] [CrossRef]
- Cintron, F. Network Issues for 3D Wireless Sensors Networks. Ph.D. Thesis, Computer Science, Michigan State University, East Lansing, MI, USA, 2013. [Google Scholar]
- Kim, M.; Kim, T.; Shon, M.; Kim, M.; Choo, H. Design of a Transmission Process for Hopping Sensors to Enhance Coverage. In Proceedings of the International Conference Wireless Networks (ICWN 10) in WORLDCOMP 2010, Las Vegas, NV, USA, 22–25 July 2010; Volume 2, pp. 377–382. [Google Scholar]
- Rostami, A.S.; Badkoobe, M.; Mohanna, F.; Keshavarz, H.; Hosseinabadi, A.A.R.; Sangaiah, A.K. Survey on clustering in heterogeneous and homogeneous wireless sensor networks. J. Supercomput. 2018, 74, 277–323. [Google Scholar] [CrossRef]
- Sabor, N.; Sasaki, S.; Abo-Zahhad, M.; Ahmed, S.M. A Comprehensive Survey on Hierarchical-Based Routing Protocols for Mobile Wireless Sensor Networks: Review, Taxonomy, and Future Directions. HindawiWirel. Commun. Mob. Comput. 2017, 2017, 2818542. [Google Scholar] [CrossRef]
- Seo, J.; Kim, M.; Hur, I.; Choi, W.; Choo, H. DRDT: Distributed and Reliable Data Transmission with Cooperative Nodes for Lossy Wireless Sensor Networks. Sensors 2010, 10, 2793–2811. [Google Scholar] [CrossRef] [PubMed]
- Cintron, F.; Pongaliur, K.; Mutka, M.W.; Xiao, L. Energy Balancing Hopping Sensor Network Model to Maximize Coverage. In Proceedings of the IEEE 2009 18th International Conference on Computer Communications and Networks (ICCCN), San Francisco, CA, USA, 3–6 August 2009. [Google Scholar]
- Kim, M.; Mutka, M.W. Recycled ID Assignment for Relocation of Hopping Sensors. In Proceedings of the IEEE World of Wireless, Mobile and Multimedia Networks (WoWMoM 11), Lucca, Italy, 20–24 June 2011; pp. 1–3. [Google Scholar]
- OMNeT Web Site. Available online: https://www.omnetpp.org (accessed on 10 February 2019).
- Zarrad, A.; Alsmadi, I. Evaluating network test scenarios for network simulators systems. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Area | 250 m × 150 m |
|---|---|
| Number of total member sensor nodes scattered | 285 |
| Number of cluster headers | 15 |
| Number of minimum members in each cluster zone | 5 |
| Maximum communication radius by jumping | 29 m |
| Maximum distance moved by one hopping | 1 m |
| Hopping capability per a sensor initially | 290 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.; Park, S.; Lee, W. Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks. Sensors 2019, 19, 1567. https://doi.org/10.3390/s19071567
Kim M, Park S, Lee W. Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks. Sensors. 2019; 19(7):1567. https://doi.org/10.3390/s19071567
Chicago/Turabian StyleKim, Moonseong, Sooyeon Park, and Woochan Lee. 2019. "Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks" Sensors 19, no. 7: 1567. https://doi.org/10.3390/s19071567
APA StyleKim, M., Park, S., & Lee, W. (2019). Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks. Sensors, 19(7), 1567. https://doi.org/10.3390/s19071567