Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System




Abstract
1. Introduction
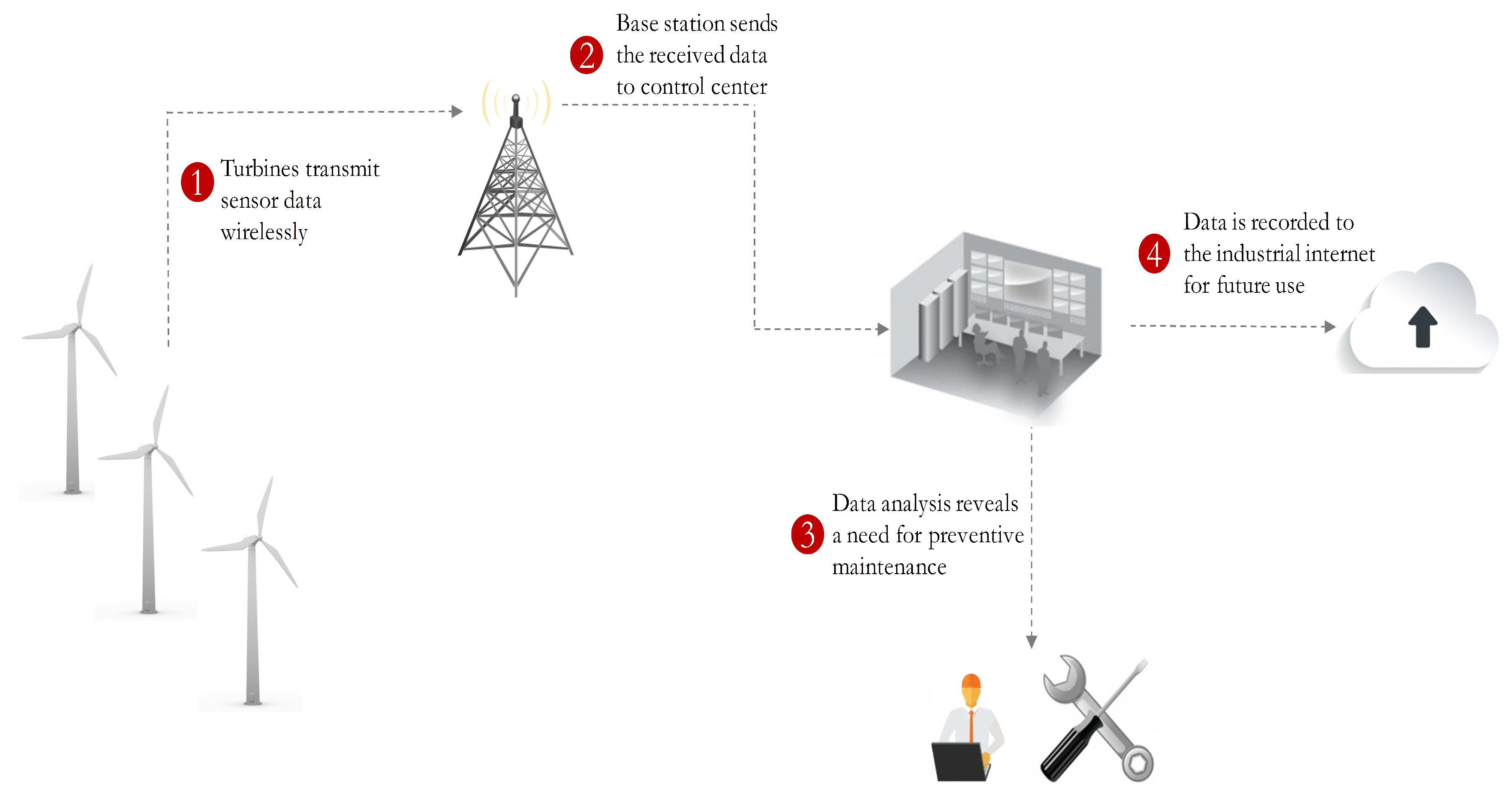
2. IoT Enabled Wind Energy Conversion System and State Space Model
3. Proposed Communication Framework
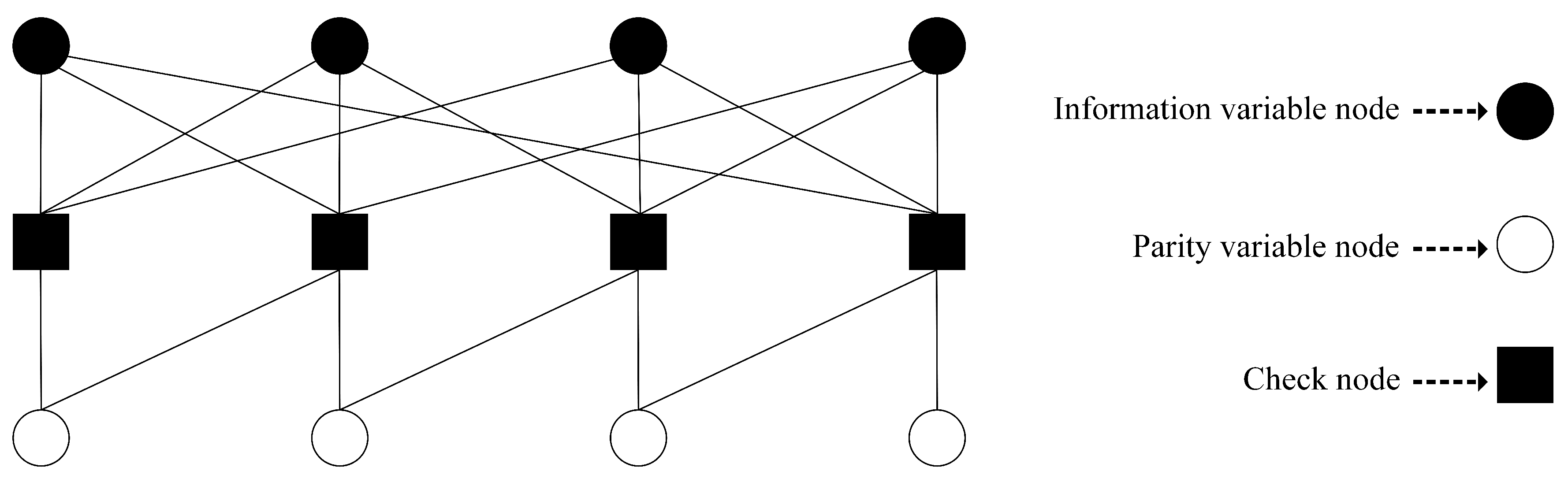
Repeat Accumulate (RA) Codes
Belief Propagation Decoding
- → set of variable nodes that have connection/edge with the check node.
- → set of check nodes that have connection/edge with the variable node.
- → LLR message sent from variable node m to check node n at iteration ℓ.
- → LLR message sent from check node n to variable node m at iteration ℓ.
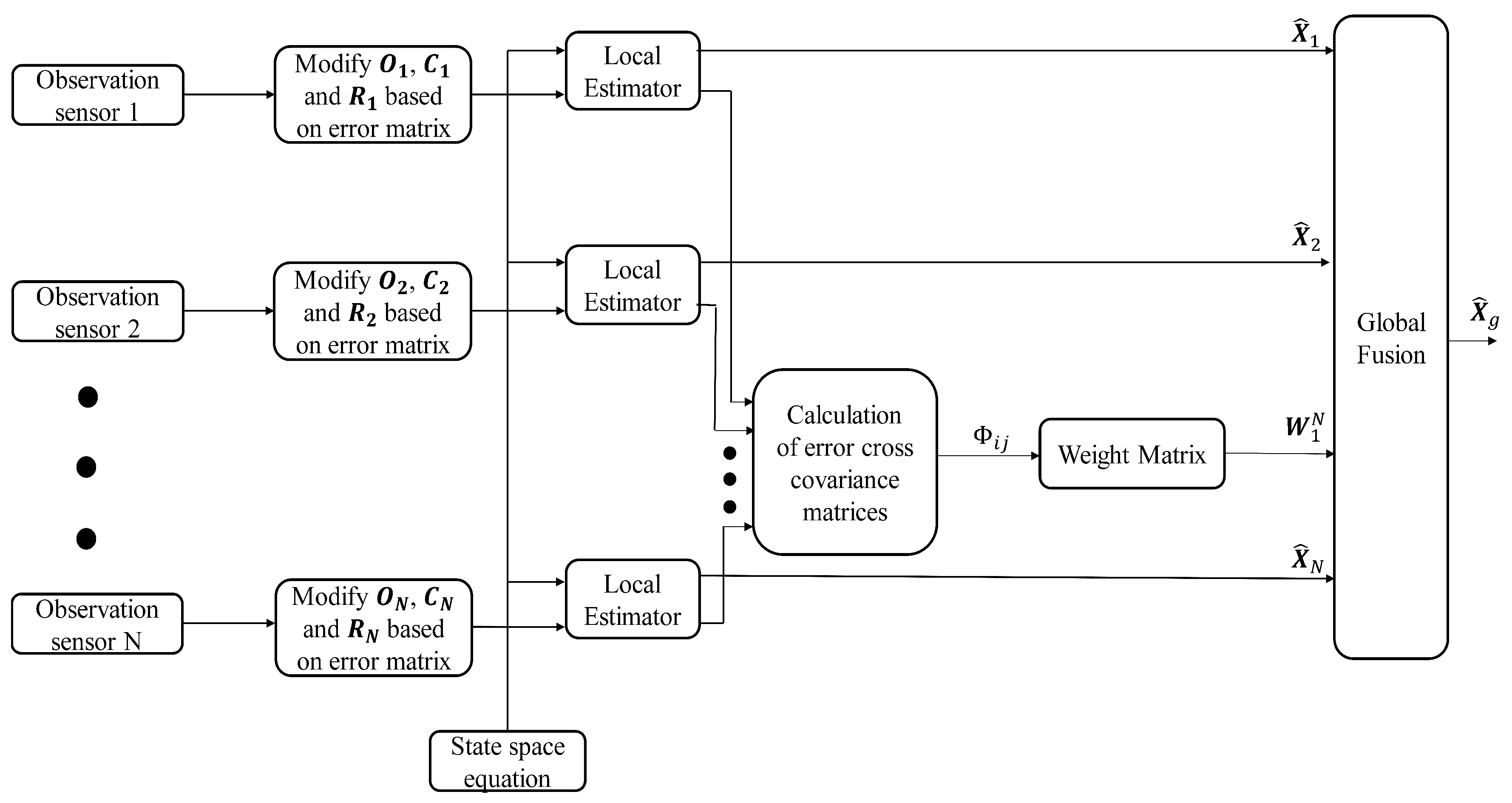
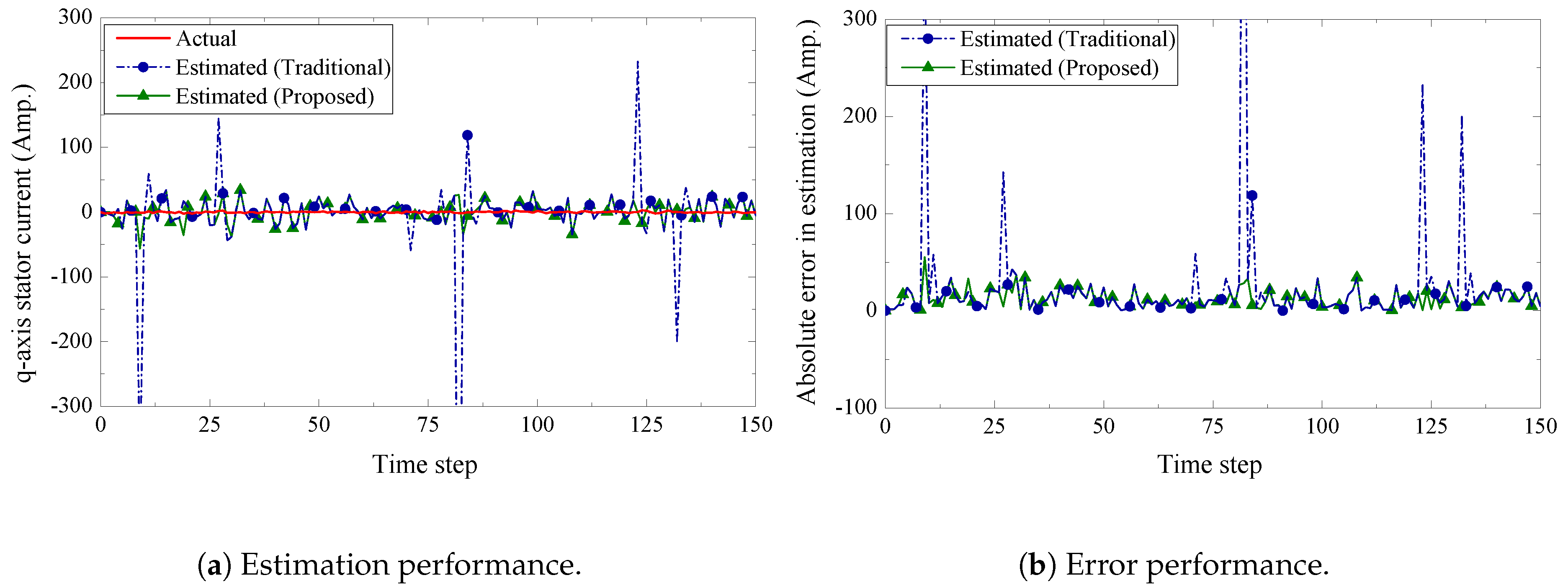
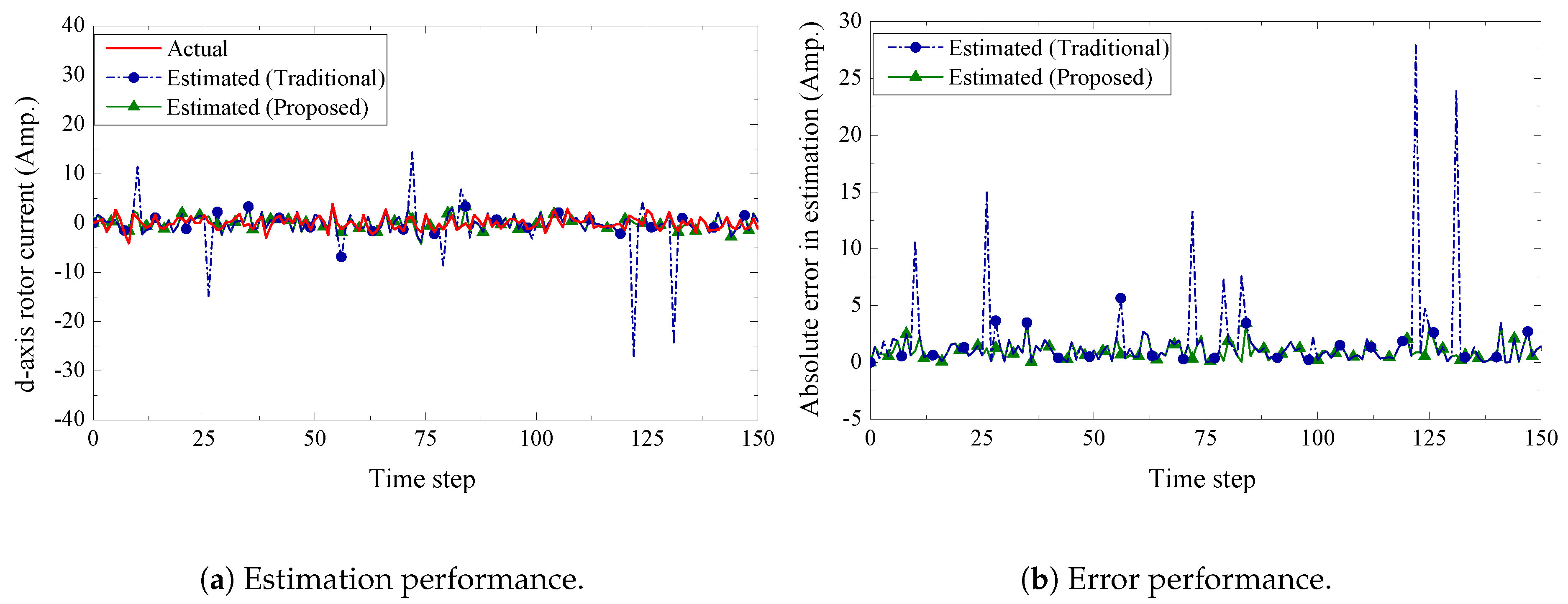
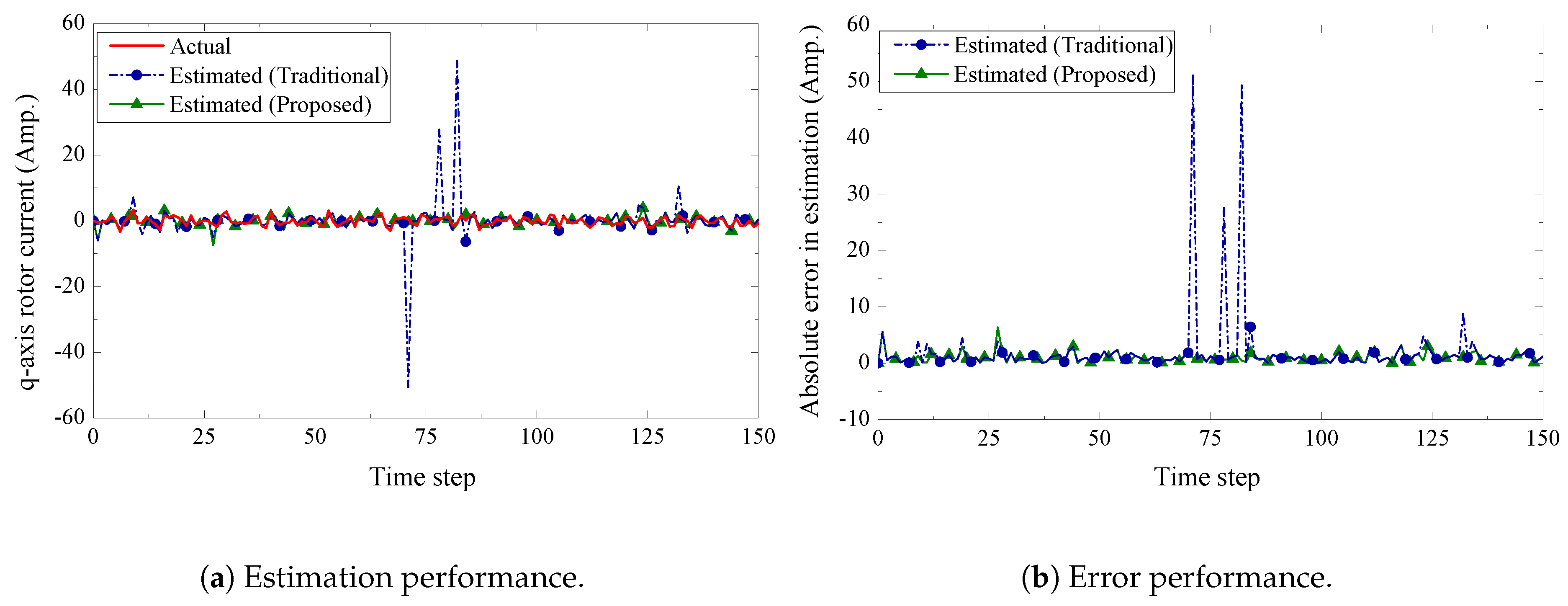
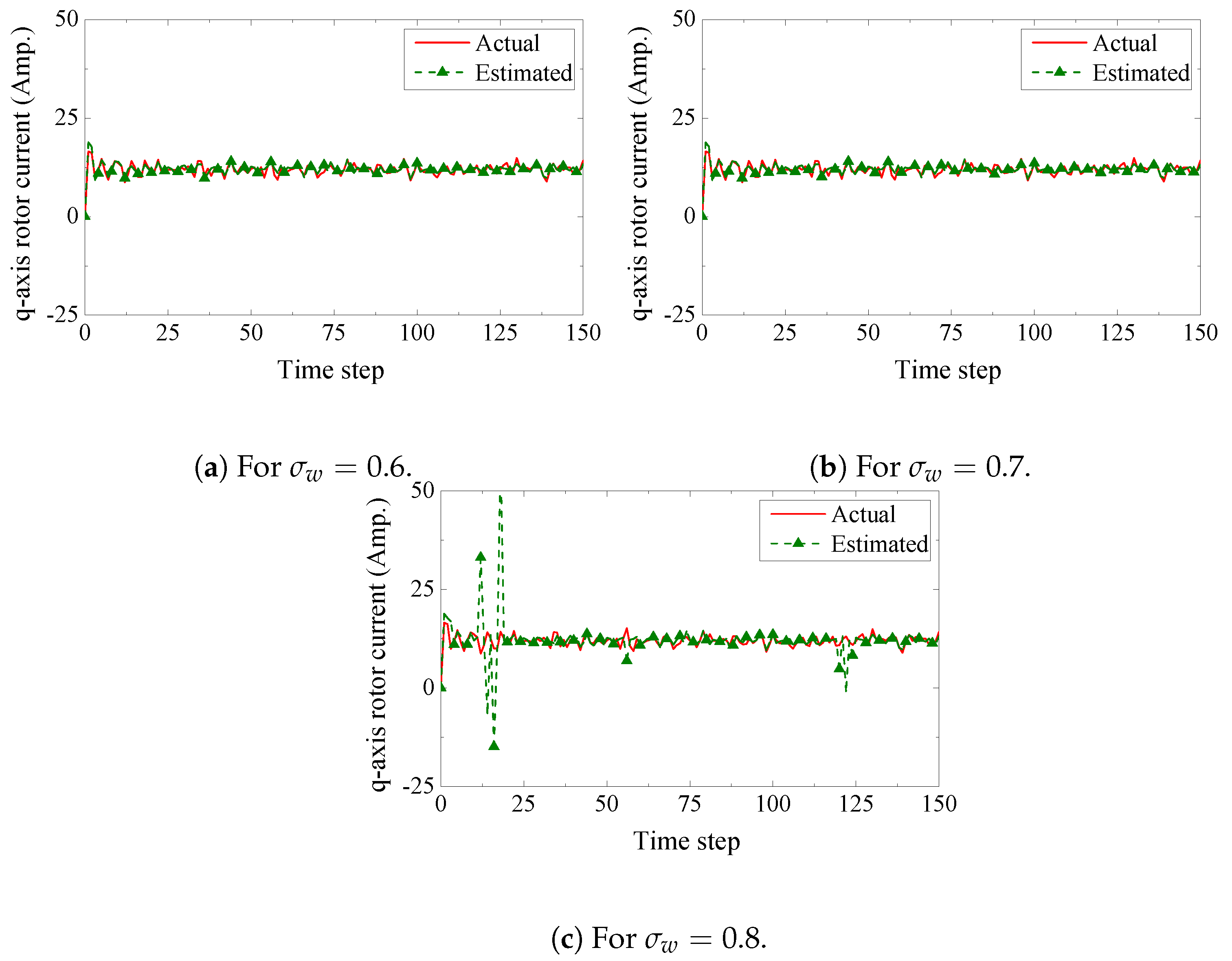
4. Proposed Sensor Fusion Technique
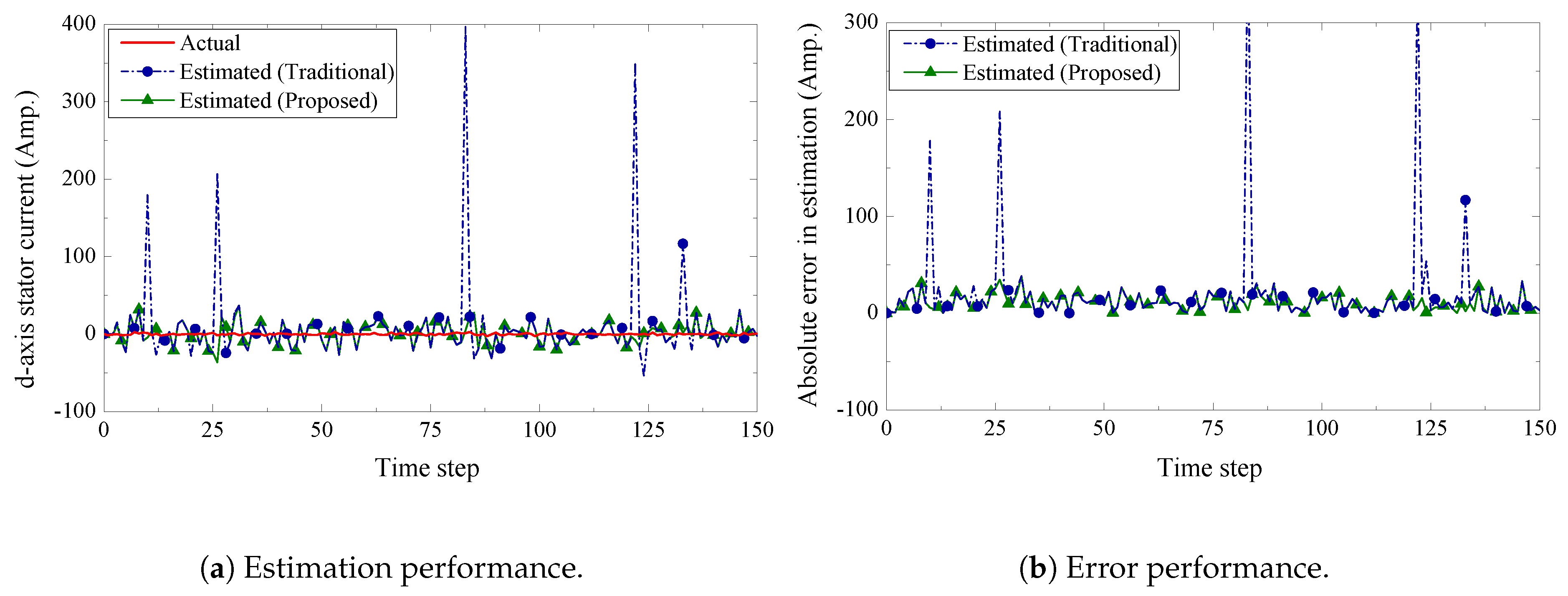
5. Performance Evaluations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moradi, H.; Vossoughi, G. Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H? and PID controllers. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Najafi Khoshrodi, M.; Jannati, M.; Sutikno, T. A Review of Wind Speed Estimation for Wind Turbine Systems Based on Kalman Filter Technique. Int. J. Electr. Comput. Eng. 2016, 6, 1406–1411. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inf. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Berg, J.C.; Miller, K. Sensor Selection for Wind Turbine State Estimation. In Proceedings of the ITEA Live-Virtual-Constructive Conference, Orlando, FL, USA, 1–4 December 2008. [Google Scholar]
- Soltani, M.N.; Knudsen, T.; Svenstrup, M.; Wisniewski, R.; Brath, P.; Ortega, R.; Johnson, K. Estimation of Rotor Effective Wind Speed: A Comparison. IEEE Trans. Control Syst. Technol. 2013, 21, 1155–1167. [Google Scholar] [CrossRef]
- Ritter, B.; Schild, A.; Feldt, M.; Konigorski, U. The design of nonlinear observers for wind turbine dynamic state and parameter estimation. J. Phys. Conf. Ser. 2016, 753, 52029. [Google Scholar] [CrossRef]
- Petar, M.; Petrovi, V.; Baotic, M. Dual Kalman Estimation of Wind Turbine States and Parameters. In Proceedings of the International Conference on Process Control, Tatranska Lomnica, Slovakia, 14–17 June 2011; pp. 85–91. [Google Scholar]
- Bourlis, D.; Bleijs, J.A.M. A wind speed estimation method using adaptive Kalman filtering for a variable speed stall regulated wind turbine. In Proceedings of the 2010 IEEE 11th International Conference on Probabilistic Methods Applied to Power Systems, Singapore, 14–17 June 2010; pp. 89–94. [Google Scholar] [CrossRef]
- Miranda-Blanco, B.N.; Díaz-Dorado, E.; Carrillo, C.; Cidrás, J. State estimation for wind farms including the wind turbine generator models. Renew. Energy 2014, 71, 453–465. [Google Scholar] [CrossRef]
- Sudev, P.; Anita, J.P.; Sudheesh, P. Nonlinear state estimation of wind turbine. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; pp. 354–358. [Google Scholar] [CrossRef]
- Yu, S.; Fernando, T.; Emami, K.; Iu, H.H.C. Dynamic State Estimation Based Control Strategy for DFIG Wind Turbine Connected to Complex Power Systems. IEEE Trans. Power Syst. 2016. [Google Scholar] [CrossRef]
- Yu, S.; Emami, K.; Fernando, T.; Iu, H.H.C.; Wong, K.P. State Estimation of Doubly Fed Induction Generator Wind Turbine in Complex Power Systems. IEEE Trans. Power Syst. 2016, 31, 4935–4944. [Google Scholar] [CrossRef]
- Prajapat, G.P.; Bhui, P.; Senroy, N.; Kar, I.N. Modelling and estimation of gear train backlash present in wind turbine driven DFIG system. IET Gener. Transm. Distrib. 2018, 12, 3527–3535. [Google Scholar] [CrossRef]
- Shahriari, S.A.A.; Raoofat, M.; Dehghani, M.; Mohammadi, M.; Saad, M. Dynamic state estimation of a permanent magnet synchronous generator-based wind turbine. IET Renew. Power Gener. 2016, 10, 1278–1286. [Google Scholar] [CrossRef]
- Shahinzadeh, H.; Moradi, J.; Gharehpetian, G.B.; Nafisi, H.; Abedi, M. IoT Architecture for Smart Grids. In Proceedings of the 2019 IEEE International Conference on Protection and Automation of Power System (IPAPS), Tehran, Iran, 8–9 January 2019; pp. 22–30. [Google Scholar] [CrossRef]
- Sun, S.L.; Deng, Z.L. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Deng, Z.L.; Gao, Y.; Mao, L.; Li, Y.; Hao, G. New approach to information fusion steady-state Kalman filtering. Automatica 2005, 41, 1695–1707. [Google Scholar] [CrossRef]
- Chen, B.; Hu, G.; Ho, D.W.C.; Zhang, W.A.; Yu, L. Distributed Robust Fusion Estimation with Application to State Monitoring Systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2994–3005. [Google Scholar] [CrossRef]
- Tian, T.; Sun, S.; Li, N. Multi-sensor information fusion estimators for stochastic uncertain systems with correlated noises. Inf. Fusion 2016, 27, 126–137. [Google Scholar] [CrossRef]
- Chen, B.; Hu, G.; Ho, D.W.; Yu, L. A New Approach to Linear/Nonlinear Distributed Fusion Estimation Problem. IEEE Trans. Autom. Control 2019, 64, 1301–1308. [Google Scholar] [CrossRef]
- Chen, B.; Ho, D.W.C.; Zhang, W.A.; Yu, L. Networked Fusion Estimation With Bounded Noises. IEEE Trans. Autom. Control 2017, 62, 5415–5421. [Google Scholar] [CrossRef]
- Ma, J.; Sun, S. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts. Signal Process. 2017, 130, 268–278. [Google Scholar] [CrossRef]
- Froese, M. Talking with Turbines through the Internet of Things. 2016. Available online: https://www.windpowerengineering.com/wind-farm-networks/talking-turbines-internet-things/ (accessed on 27 March 2019).
- Masoud Barakati, S. Modeling and Controller Design of a Wind Energy Conversion System Including a Matrix Converter. 2008, p. 264. Available online: http://hdl.handle.net/10012/3786 (accessed on 27 March 2019).
- Barakati, S.; Kazerani, M.; Aplevich, J. Maximum Power Tracking Control for a Wind Turbine System Including a Matrix Converter. IEEE Trans. Energy Convers. 2009, 24, 705–713. [Google Scholar] [CrossRef]
- Ugalde-Loo, C.E.; Ekanayake, J.B.; Jenkins, N. State-Space Modeling of Wind Turbine Generators for Power System Studies. IEEE Trans. Ind. Appl. 2013, 49, 223–232. [Google Scholar] [CrossRef]
- Ugalde-Loo, C.E.; Ekanayake, J.B. State-space modelling of variable-speed wind turbines: A systematic approach. In Proceedings of the IEEE International Conference on Sustainable Energy Technologies (ICSET), Paris, France, 6–9 December 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Khyam, M.O.; Ali, G.G.M.N.; Liu, Z.; Pesch, D.; Chong, P.H.J. Reliable State Estimation of an Unmanned Aerial Vehicle Over a Distributed Wireless IoT Network. IEEE Trans. Reliab. 2019, 1–9. [Google Scholar] [CrossRef]
- Chung, S.-Y.; Forney, G.; Richardson, T.; Urbanke, R. On the design of low-density parity-check codes within 0.0045 dB of the Shannon limit. IEEE Commun. Lett. 2001, 5, 58–60. [Google Scholar] [CrossRef]
- Ten Brink, S.; Kramer, G.; Ashikhmin, A. Design of Low-Density Parity-Check Codes for Modulation and Detection. IEEE Trans. Commun. 2004, 52, 670–678. [Google Scholar] [CrossRef]
- Ten Brink, S.; Kramer, G. Design of repeat-accumulate codes for iterative detection and decoding. IEEE Trans. Signal Process. 2003, 51, 2764–2772. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Zhang, N.; Wang, S. Performance estimation of finite-length repeat–accumulate codes. IET Commun. 2015, 9, 1902–1905. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Khyam, M.O.; Guan, Y.L.; Ali, G.G.N.; Nguyen, K.D.; Lechner, G. Delay-Universal Channel Coding with Feedback. IEEE Access 2018. [Google Scholar] [CrossRef]
- Chung, S.Y.; Richardson, T.J.; Urbanke, R.L.; Chung, S.Y.; Richardson, T.J.; Urbanke, R.L. Analysis of sum-product decoding of low-density parity-check codes using a {Gaussian} approximation. IEEE Trans. Inform. Theory 2001, 47, 657–670. [Google Scholar] [CrossRef]
- Johnson, S.J. Iterative Error Correction: Turbo, Low-Density Parity-Check and Repeat-Accumulate Codes; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Faragher, R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes]. IEEE Signal Process. Mag. 2012, 29, 128–132. [Google Scholar] [CrossRef]
- Sun, S.l. Multi-sensor optimal information fusion Kalman filters with applications. Aerosp. Sci. Technol. 2004, 8, 57–62. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Works | Type of Wind Turbine | Filter Type | Sensor Fusion | Impact of Wireless Channel | Error Correction Technique |
|---|---|---|---|---|---|
| Berg et al. [6] | Generic | Linear Kalman | No | No | No |
| Ritter et al. [8] | Generic | Linear Kalman | No | No | No |
| Petar et al. [9] | Generic | Extended Kalman | No | No | No |
| Bourlis et al. [10] | Generic | Adaptive Kalman | No | No | No |
| Blanco et al. [11] | Generic | Extended Kalman | No | No | No |
| Sudev et al. [12] | Generic | Particle filter | No | No | No |
| Yu et al. [13] | DFIG | Unscented Kalman | No | No | No |
| Yu et al. [14] | DFIG | Unscented Kalman | No | No | No |
| Prajapat et al. [15] | DFIG | Unscented Kalman | No | No | No |
| Shahriari et al. [16] | PMSG | Extended Kalman | No | No | No |
| This work | Generic | Linear Kalman | Yes | Yes | Yes |
| Parameter | Value |
|---|---|
| Base frequency | 10 Hz |
| Stator frequency | 15 Hz |
| Rotor frequency | 15 Hz |
| Resistance of stator | 0.004 Ω |
| Resistance of rotor | 0.005 Ω |
| Reactance of stator | 0.09 Ω |
| Reactance of rotor | 0.08 Ω |
| Magnetizing reactance | 3.95 Ω |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noor-A-Rahim, M.; Khyam, M.O.; Li, X.; Pesch, D. Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors 2019, 19, 1566. https://doi.org/10.3390/s19071566
Noor-A-Rahim M, Khyam MO, Li X, Pesch D. Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors. 2019; 19(7):1566. https://doi.org/10.3390/s19071566
Chicago/Turabian StyleNoor-A-Rahim, Md., M. O. Khyam, Xinde Li, and Dirk Pesch. 2019. "Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System" Sensors 19, no. 7: 1566. https://doi.org/10.3390/s19071566
APA StyleNoor-A-Rahim, M., Khyam, M. O., Li, X., & Pesch, D. (2019). Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors, 19(7), 1566. https://doi.org/10.3390/s19071566