In-Depth Investigation into the Transient Humidity Response at the Body-Seat Interface on Initial Contact Using a Dual Temperature and Humidity Sensor

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
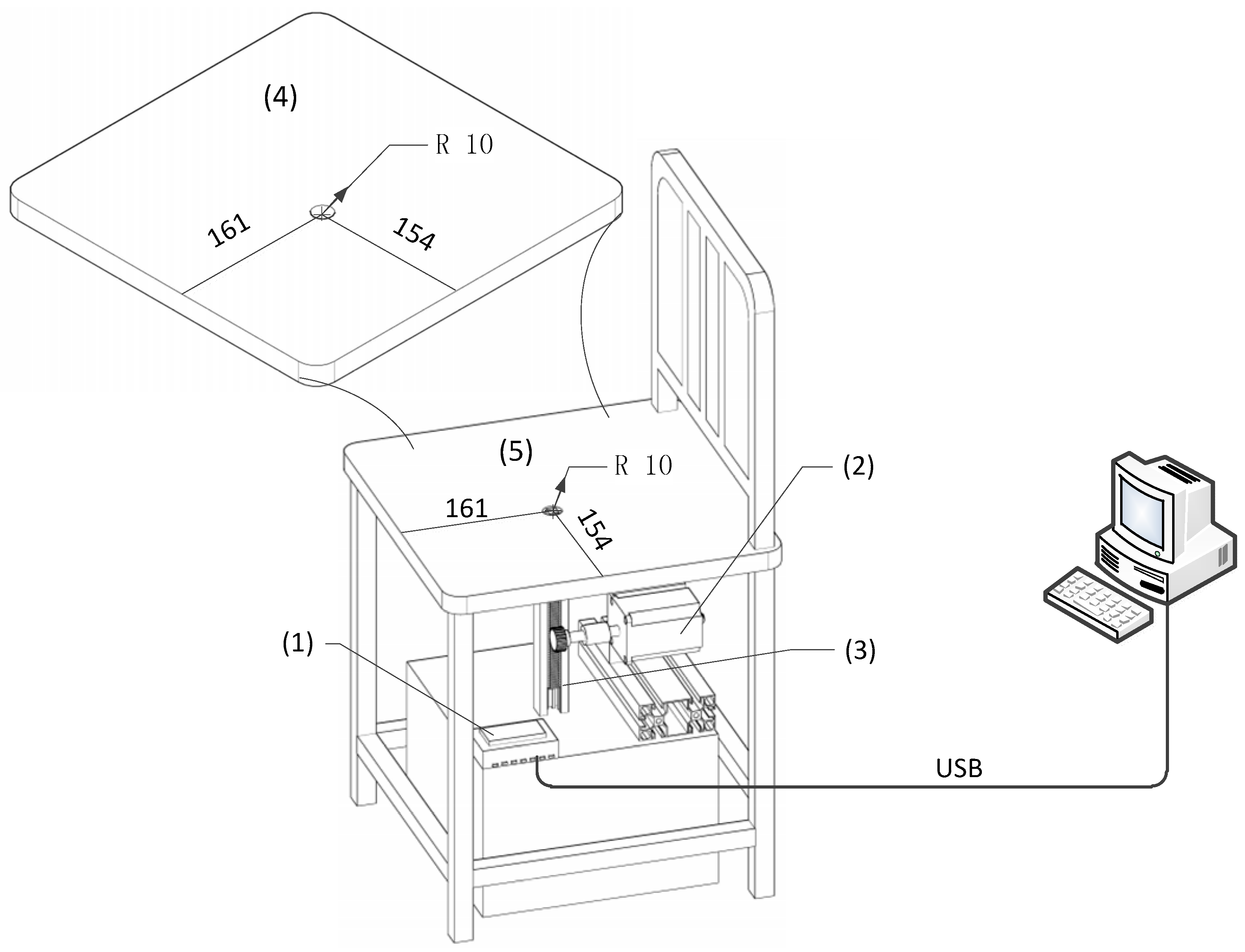
2.1. Hardware System Description
2.2. Sensor Evaluation
2.3. Consistency Test
2.4. Heating Trial
2.5. Human Trial
2.5.1. Sensor Movement
2.5.2. Participant Movement
2.6. Statistical Analysis
3. Results
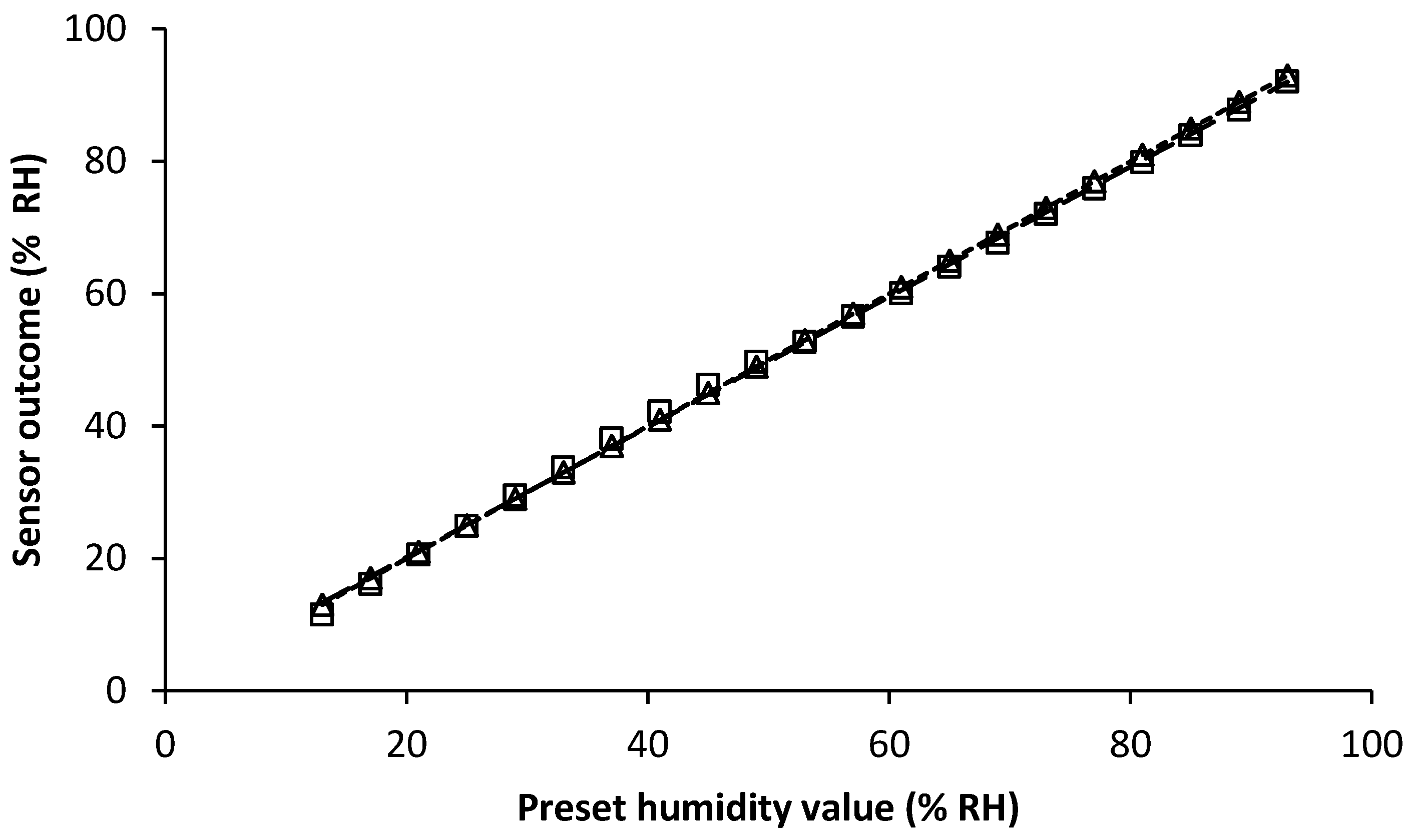
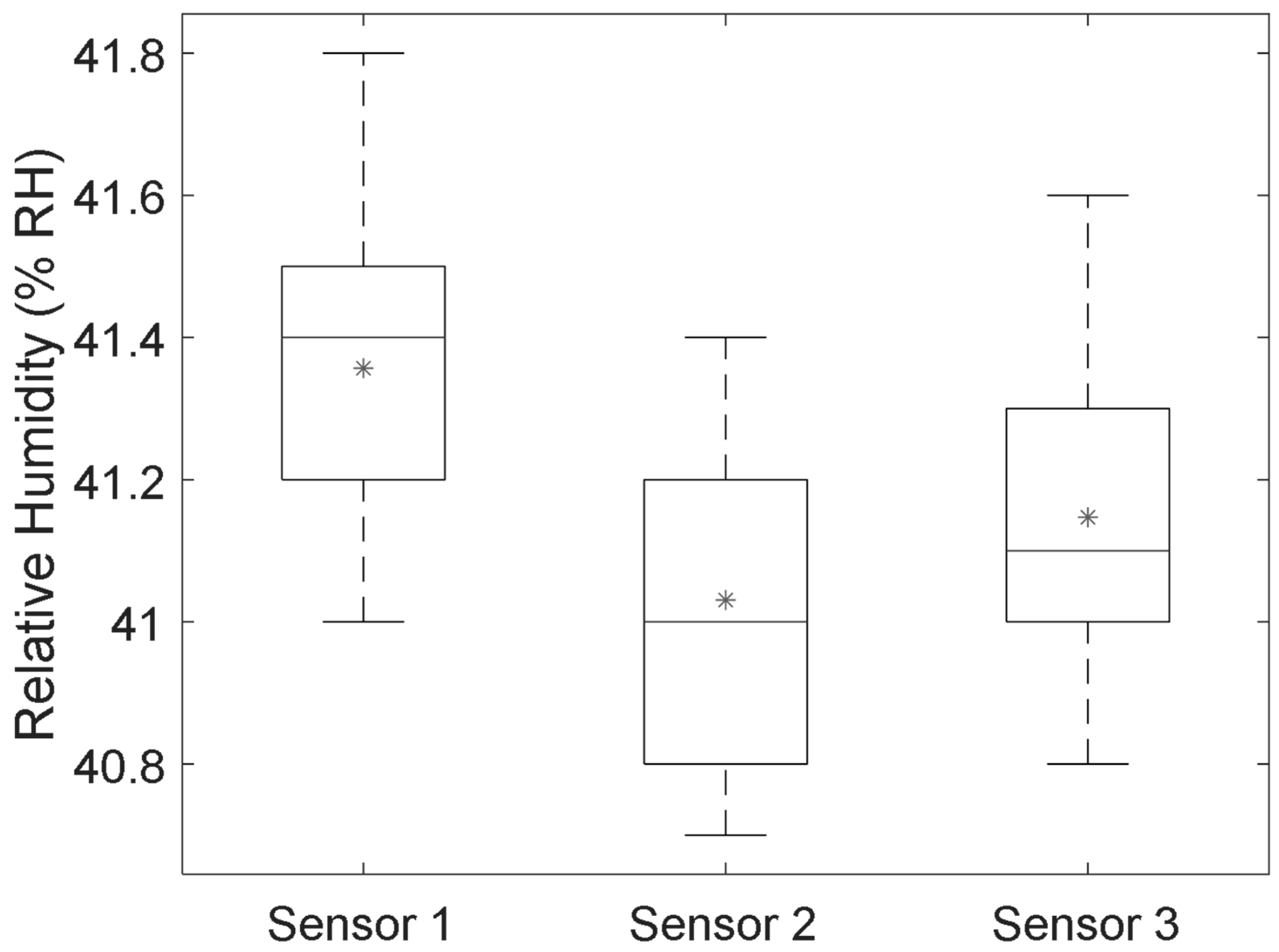
3.1. Sensor Performance
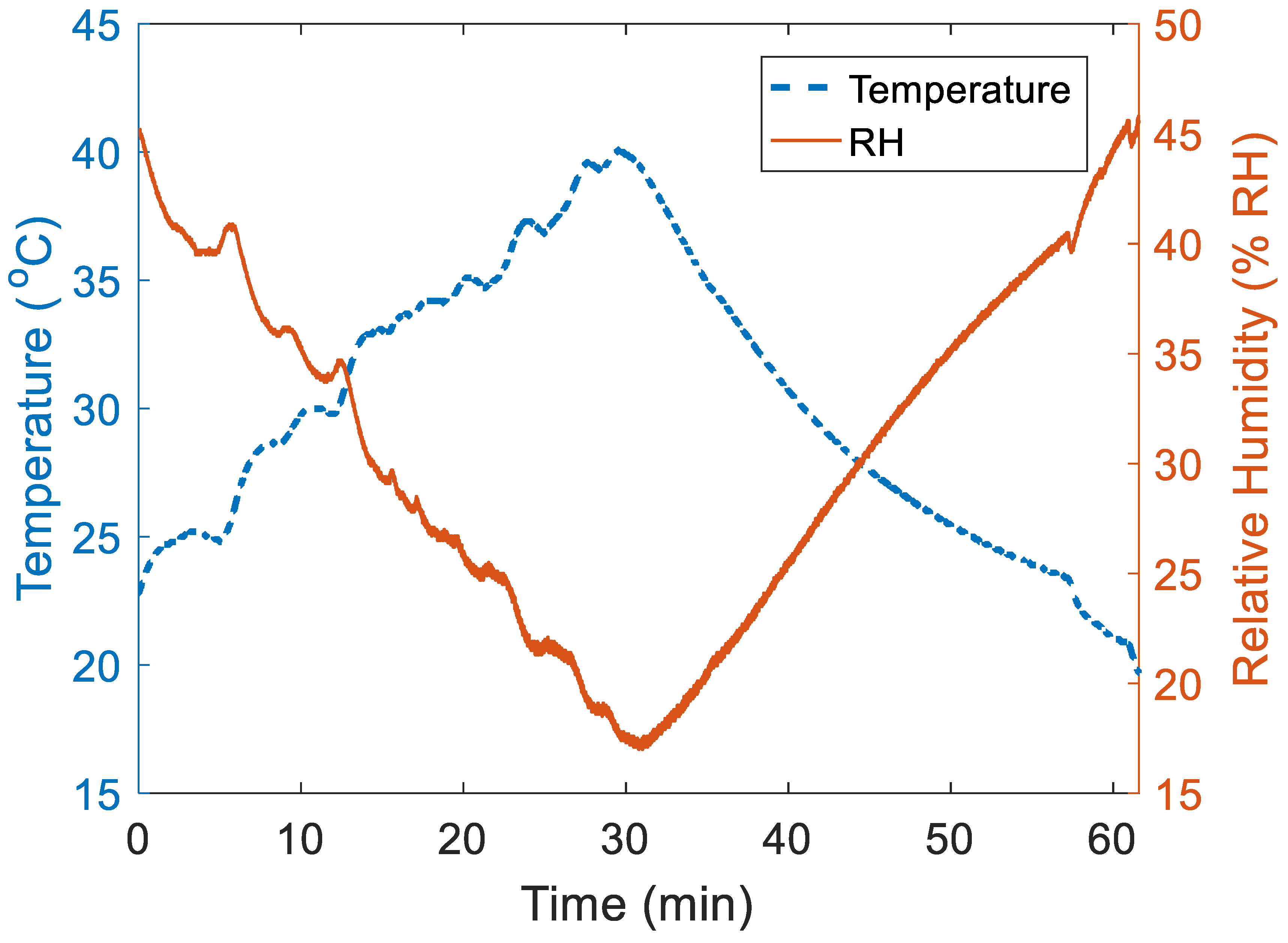
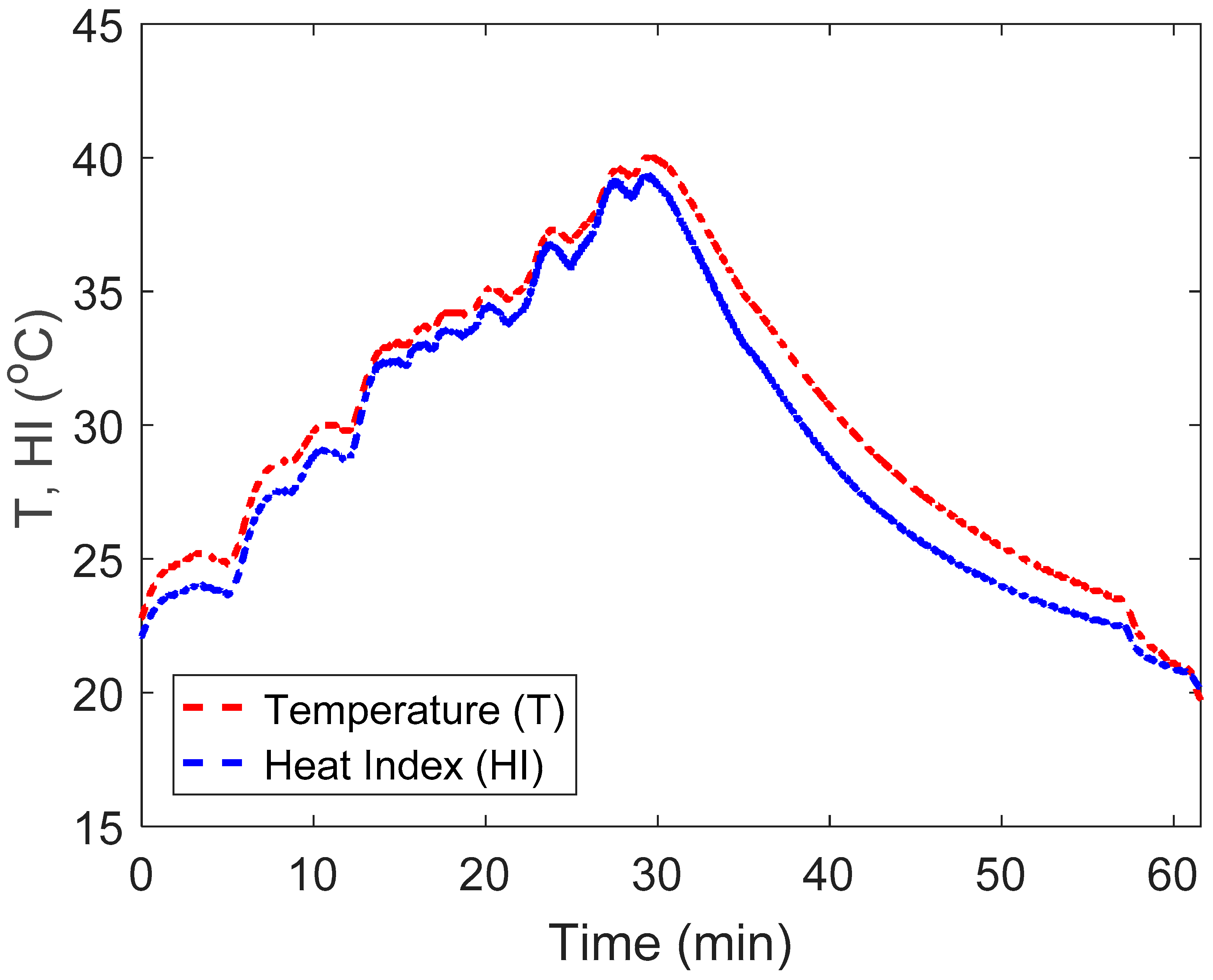
3.2. Relationship between Temperature and RH
| c1 = 0.363445176, | c2 = 0.988622465, | c3 = 4.777144035 |
| c4 = −0.114037667, | c5 = −8.50208 × 10−4, | c6 = −2.0716198 × 10−2 |
| c7 = 6.87678 × 10−4, | c8 = 2.74954 × 10−4, | c9 = 0 |
3.3. Measurement of the Body-Seat Interface RH
3.3.1. Sensor Movement
3.3.2. Participant Movement
4. Discussion
4.1. Sensor Evaluation
4.2. Transient Characteristics of RH at the Contact Surface
4.3. Limitations
- Evaluate the performance of the temperature-humidity-integrated sensor and determine the potential for (and confounding factors underpinning) the artefact based changes in RH. Our results suggest that the HTU21D could be considered a more ideal choice for simultaneously measuring the microenvironment (both temperature and RH) changes at the body-seat interface.
- Demonstrate that a rapid heating or cooling could have a strong impact on reported RH values owing to the environmental changes (such as thermal exchange) within a small area. It must be remembered that the body-seat interface RH has an association with the body temperature transmitted from user to sensors. As heat conduction through air is slow, the RH estimation at skin levels will be subject to artefact enhancement until the temperature of the sensor approximates that of the skin.
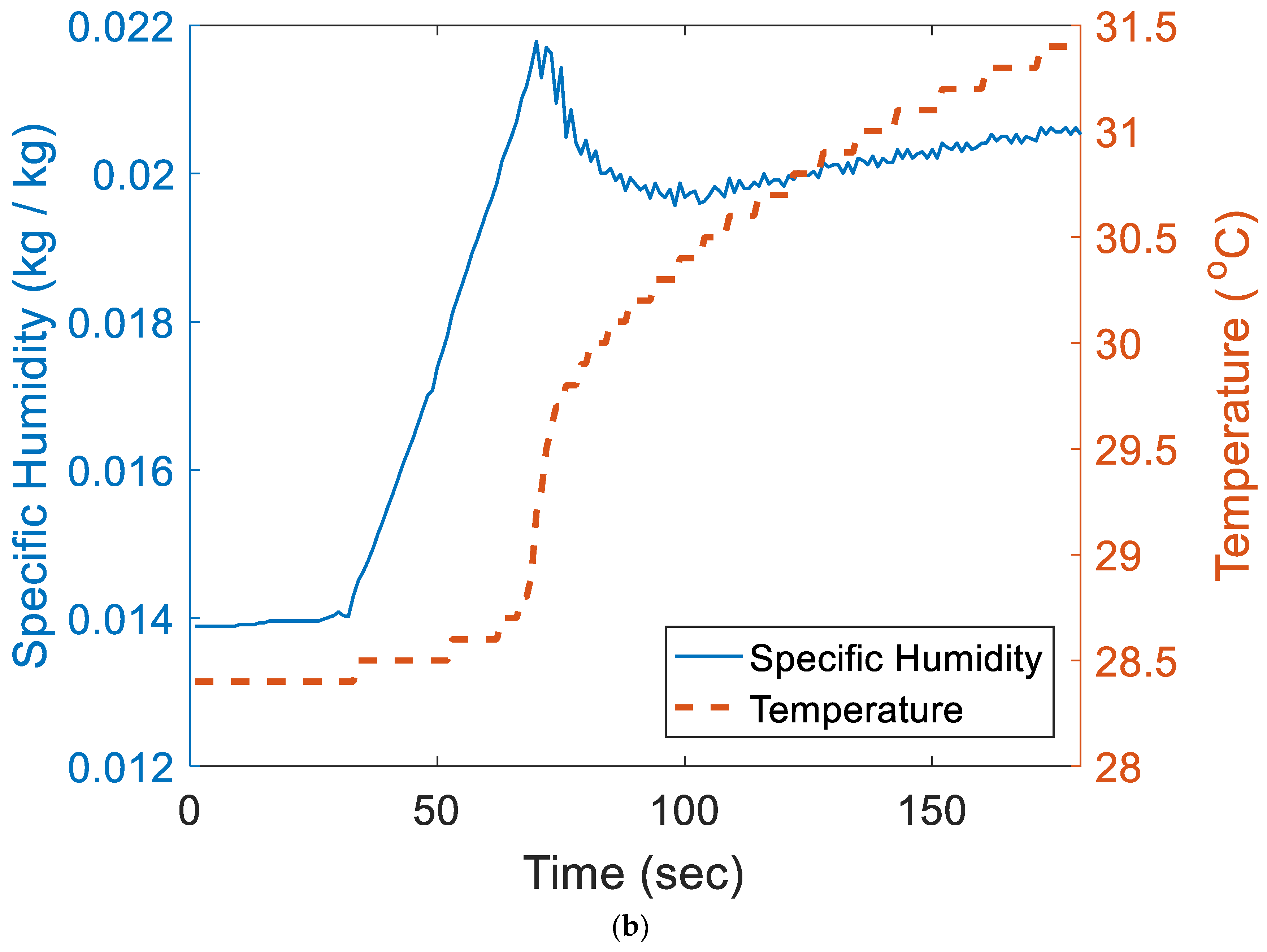
- The initial sitting contact induced RH peak could be considered an artefact resulting from the increased moisture associated with the warmer body entering the small region over a colder sensor. This finding further highlights the importance of monitoring temperature changes while investigating the RH variations at the contact surface. This monitoring is not only important for the start of sitting, but also during prolonged periods of sitting as the person starts to fidget.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Coenen, P.; Gilson, N.; Healy, G.N.; Dunstan, D.W.; Straker, L.M. A qualitative review of existing national and international occupational safety and health policies relating to occupational sedentary behavior. Appl. Ergon. 2017, 60, 320–333. [Google Scholar] [CrossRef]
- Colley, R.C.; Garriguet, D.; Janssen, I.; Craig, C.L.; Clarke, J.; Tremblay, M.S. Physical activity of Canadian adults: Accelerometer results from the 2007 to 2009 Canadian Health Measures Survey. Health Rep. 2011, 22, 7–14. [Google Scholar]
- Healy, G.N.; Matthews, C.E.; Dunstan, D.W.; Winkler, E.H.; Owen, N. Sedentary time and cardio-metabolic biomarkers in US adults: NHANES 2003–2006. Eur. Heart J. 2011, 32, 590–597. [Google Scholar] [CrossRef] [PubMed]
- Matthews, C.E.; Chen, K.Y.; Freedson, P.S.; Buchowski, M.S.; Beech, B.M. Amount of time spent in sedentary behaviors in the United States, 2003–2004. Am. J. Epidemiol. 2008, 167, 875–881. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, M.T.; Hamilton, D.G.; Zderic, T.W. Role of low energy expenditure and sitting in obesity, metabolic syndrome, type 2 diabetes, and cardiovascular disease. Diabetes 2007, 56, 2655–2667. [Google Scholar] [CrossRef] [PubMed]
- Chai, C.Y.; Sadou, O.; Worsley, P.R.; Bader, D.L. Pressure signatures can influence tissue response for individuals supported on an alternating pressure mattress. J. Tissue Viability 2017, 26, 180. [Google Scholar] [CrossRef] [PubMed]
- Redelings, M.D.; Lee, N.E.; Sorvillo, F. Pressure ulcers: More lethal than we thought? Adv. Skin Wound Care 2005, 18, 367–372. [Google Scholar] [CrossRef]
- Marchione, F.G.; Araújo, L.Q.; Araújo, L.V. Approaches that use software to support the prevention of pressure ulcer: A systematic review. Int. J. Med. Inform. 2015, 84, 725–736. [Google Scholar] [CrossRef]
- Gefen, A. How do microclimate factors affect the risk for superficial pressure ulcers: A mathematical modeling study. J. Tissue Viability 2011, 20, 81–88. [Google Scholar] [CrossRef]
- Irzmanska, E.; Lipp, B.; Kujawa, J.; Irzmanski, R. Textiles preventing skin damage. Fibres Text. East. Eur. 2010, 18, 84–90. [Google Scholar]
- Irzmanska, E.; Charlusz, M.; Kujawa, J.; Kowalski, J.; Pawlicki, L.; Irzmanski, R. Using impedance plethysmography to evaluate antidecubital underlay systems for chronically immobilized patients. Adv. Clin. Exp. Med. 2010, 19, 637–651. [Google Scholar]
- Magalhaes, M.G.; Gragnani, A.; Veiga, D.F.; Blanes, L.; Galhardo, V.C.; Kallas, H.; Juliano, Y.; Ferreira, L.M. Risk Factors for pressure ulcers in hospitalized elderly without significant cognitive impairment. Wounds-Compend. Clin. Res. Pract. 2007, 19, 20. [Google Scholar]
- Freeto, T.; Cypress, A.; Amalraj, S.; Yusufishaq, M.S.; Bogie, K.M. Development of a sitting microenvironment simulator for wheelchair cushion assessment. J. Tissue Viability 2016, 25, 175–179. [Google Scholar] [CrossRef]
- Zitek, P.; Vyhlidal, T.; Simeunovic, G.; Novakova, L.; Cizek, J. Novel personalized and humidified air supply for airliner passengers. Build. Environ. 2010, 45, 2345–2353. [Google Scholar] [CrossRef]
- Conceicao, E.E.; Lucio, M.R.; Rosa, S.P.; Custodio, A.V.; Andrade, R.L.; Meira, M.A. Evaluation of comfort level in desks equipped with two personalized ventilation systems in slightly warm environments. Build. Environ. 2010, 45, 601–609. [Google Scholar] [CrossRef]
- Ferguson, M.; Hirose, H.; Nicholson, G.; Call, E. Thermodynamic rigid cushion loading indenter: A buttock-shaped temperature and humidity measurement system for cushioning surfaces under anatomical compression conditions. J. Rehabil. Res. Dev. 2009, 46, 945–956. [Google Scholar] [CrossRef]
- Diesing, P.; Hochmann, D.; Boenick, U.; Kraft, M. A novel method for patient-oriented assignment of wheelchair cushions based on standardized laboratory testing procedures. Biomed. Eng. 2005, 50, 188–194. [Google Scholar] [CrossRef]
- McCarthy, P.W.; Liu, Z.F.; Heusch, A.I.; Cascioli, V. Assessment of humidity and temperature sensors and their application to seating. J. Med. Eng. Technol. 2009, 33, 449–453. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.F.; Cheng, H.F.; Luo, Z.M.; Cascioli, V.; Heusch, A.I.; Nair, N.R.; McCarthy, P.W. Performance assessment of a humidity measurement system and its use to evaluate moisture characteristics of wheelchair cushions at the user–seat interface. Sensors 2017, 17, 775. [Google Scholar] [CrossRef]
- Liu, Z.F.; Chang, L.; Luo, Z.M.; Cascioli, V.; Heusch, A.I.; McCarthy, P.W. Design and development of a thermal imaging system based on a temperature sensor array for temperature measurements of enclosed surfaces and its use at the body-seat interface. Measurement 2017, 104, 123–131. [Google Scholar] [CrossRef]
- Zemp, R.; Taylor, W.R.; Lorenzetti, S. Seat pan and backrest pressure distribution while sitting in office chairs. Appl. Ergon. 2016, 53, 1–9. [Google Scholar] [CrossRef]
- Meilinger, T.; Garsoffky, B.; Schwan, S. A catch-up illusion arising from a distance-dependent perception bias in judging relative movement. Sci. Rep. 2017, 7, 17037. [Google Scholar] [CrossRef] [PubMed]
- Morrison, S.; Sosnoff, J.J.; Heffernan, K.S.; Jae, S.Y.; Bo, F. Aging, hypertension and physiological tremor: The contribution of the cardioballistic impulse to tremorgenesis in older adults. J. Neurol. Sci. 2013, 326, 68–74. [Google Scholar] [CrossRef] [PubMed]
- Anderson, G.B.; Bell, M.L.; Peng, R.D. Methods to Calculate the Heat Index as an Exposure Metric in Environmental Health Research. Environ. Health Perspect. 2013, 121, 1111–1119. [Google Scholar] [CrossRef] [PubMed]
- Alduchov, O.A.; Eskridge, R.E. Improved Magnus’ form approximation of saturation vapor pressure. J. Appl. Meteorol. 1996, 35, 601–609. [Google Scholar] [CrossRef]
- Stancic, M.; Kasikovic, N.; Grujic, D.; Novakovic, D.; Milosevic, R.; Ruzicic, B.; Gersak, J. Mathematical models for water vapour resistance prediction of printed garments. Color Technol. 2018, 134, 82–88. [Google Scholar] [CrossRef]
- Li, F.Z.; Li, Y. Effect of clothing material on thermal responses of the human body. Model. Simul. Mater. Sci. Eng. 2005, 13, 809–827. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Li, J.; Liu, M.; Cascioli, V.; McCarthy, P.W. In-Depth Investigation into the Transient Humidity Response at the Body-Seat Interface on Initial Contact Using a Dual Temperature and Humidity Sensor. Sensors 2019, 19, 1471. https://doi.org/10.3390/s19061471
Liu Z, Li J, Liu M, Cascioli V, McCarthy PW. In-Depth Investigation into the Transient Humidity Response at the Body-Seat Interface on Initial Contact Using a Dual Temperature and Humidity Sensor. Sensors. 2019; 19(6):1471. https://doi.org/10.3390/s19061471
Chicago/Turabian StyleLiu, Zhuofu, Jianwei Li, Meimei Liu, Vincenzo Cascioli, and Peter W McCarthy. 2019. "In-Depth Investigation into the Transient Humidity Response at the Body-Seat Interface on Initial Contact Using a Dual Temperature and Humidity Sensor" Sensors 19, no. 6: 1471. https://doi.org/10.3390/s19061471
APA StyleLiu, Z., Li, J., Liu, M., Cascioli, V., & McCarthy, P. W. (2019). In-Depth Investigation into the Transient Humidity Response at the Body-Seat Interface on Initial Contact Using a Dual Temperature and Humidity Sensor. Sensors, 19(6), 1471. https://doi.org/10.3390/s19061471