EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges




Abstract
1. Introduction
2. Overview of EEG-Based BCIs
3. Introduction to MI EEG-Based BCIs
3.1. Raw EEG Data
3.2. Pre-Processing
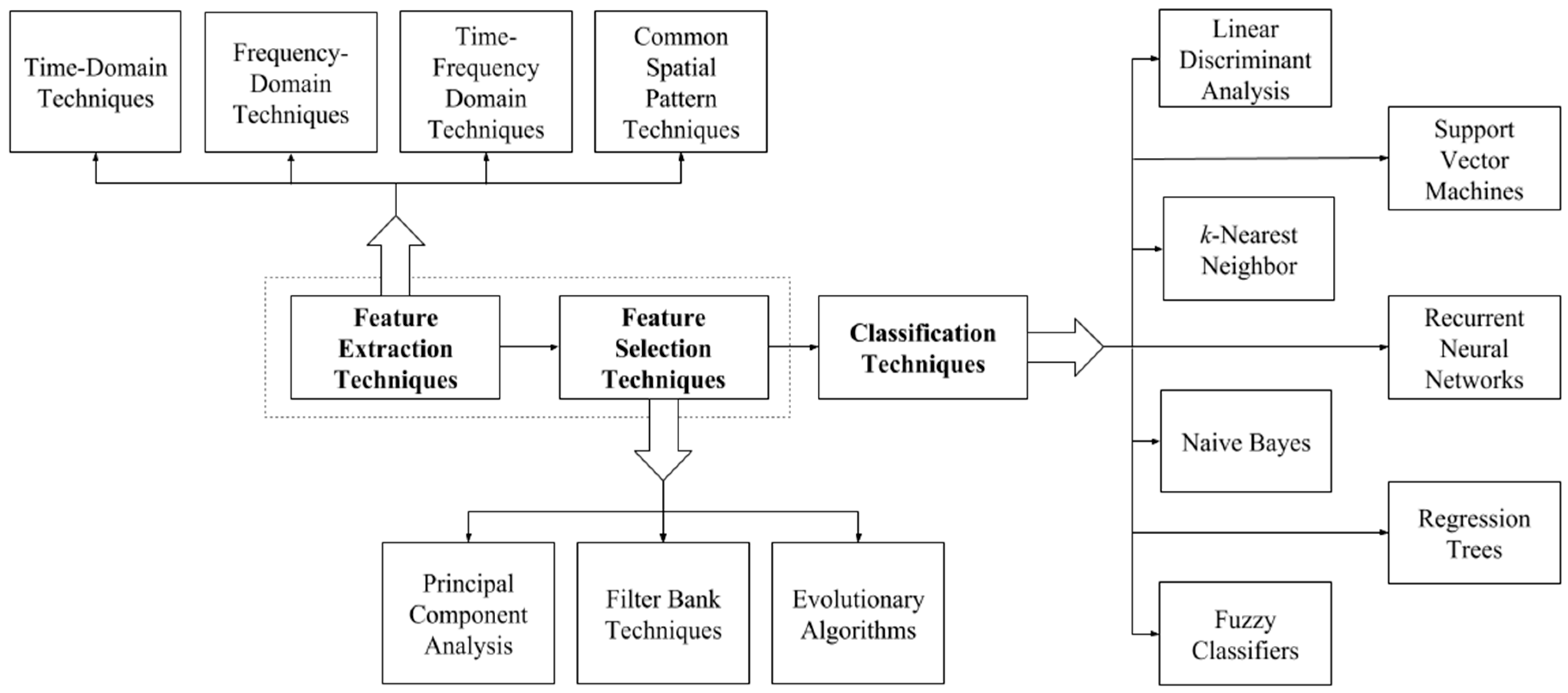
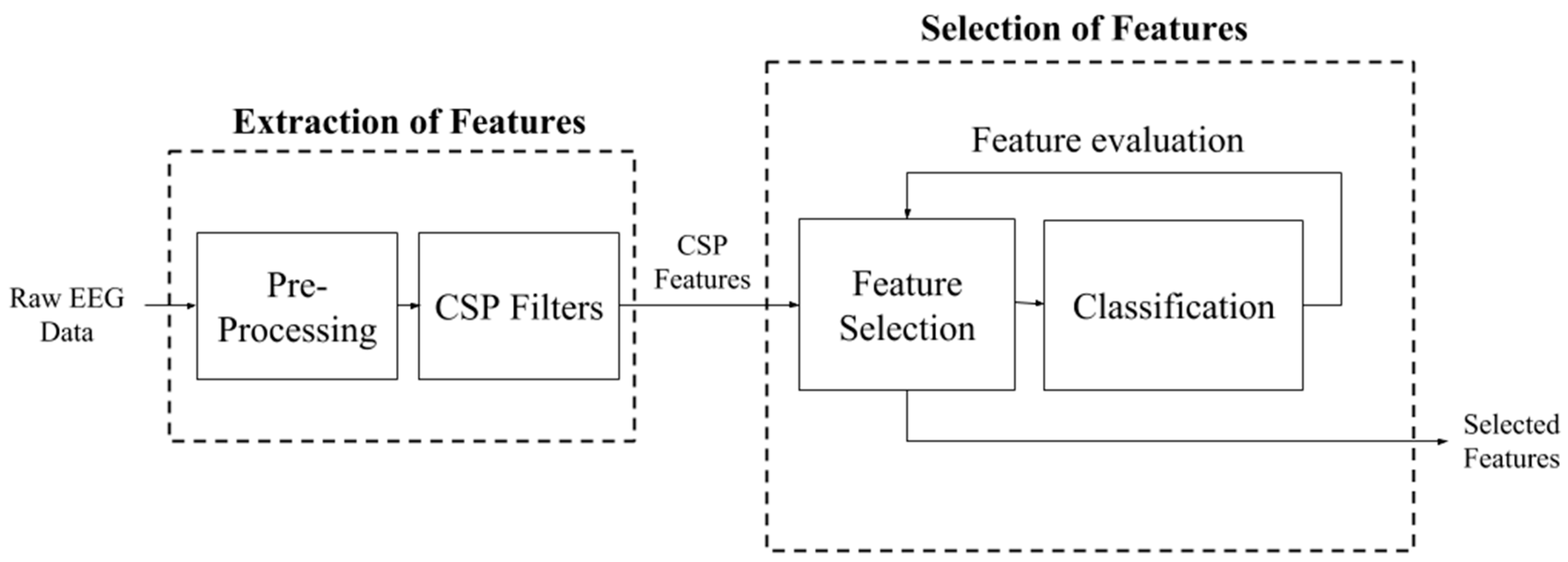
3.3. Feature Extraction, Feature Selection and Classification
3.4. Hybrid BCIs Using MI-EEG: New Horizons
4. Feature Extraction, Feature Selection and Classification in MI EEG-Based BCIs
4.1. Data and Recording Protocols
4.2. Feature Extraction
4.2.1. Time-Domain and Frequency-Domain Techniques
4.2.2. Time-Frequency Domain Techniques
4.2.3. Common Spatial Patterns
4.3. Feature Selection
4.3.1. Principal Component Analysis (PCA)
4.3.2. Filter Bank Selection
4.3.3. Evolutionary Algorithms
4.4. Classification Methods
4.5. The Deep Learning Approach
5. Case Study
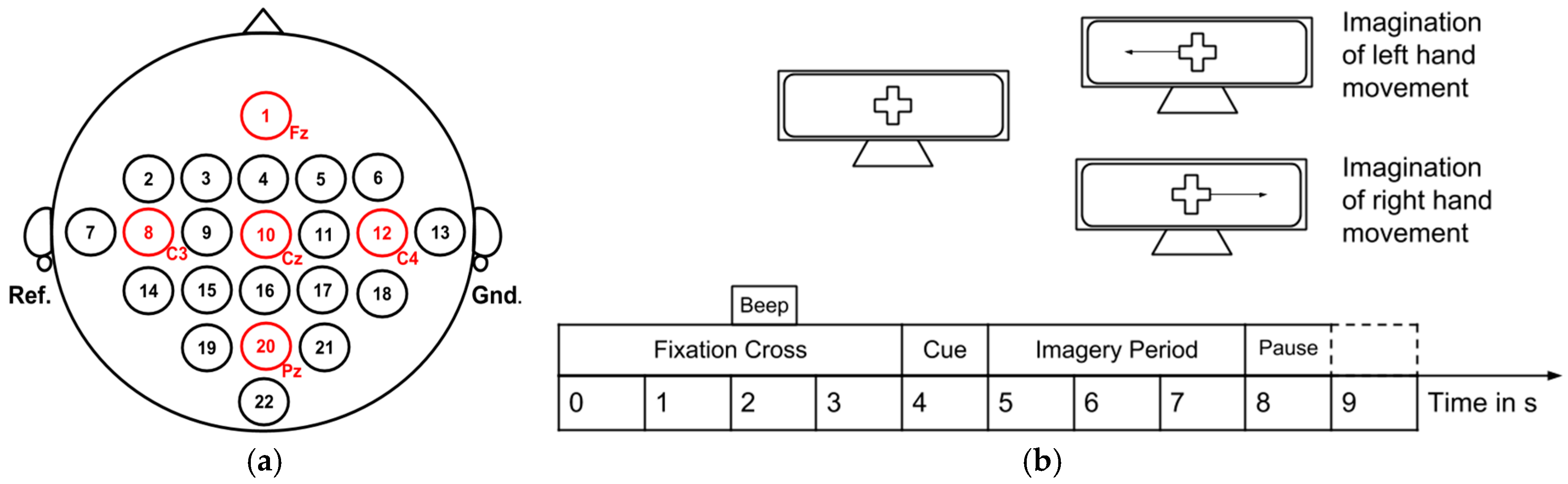
5.1. Selected Data Set
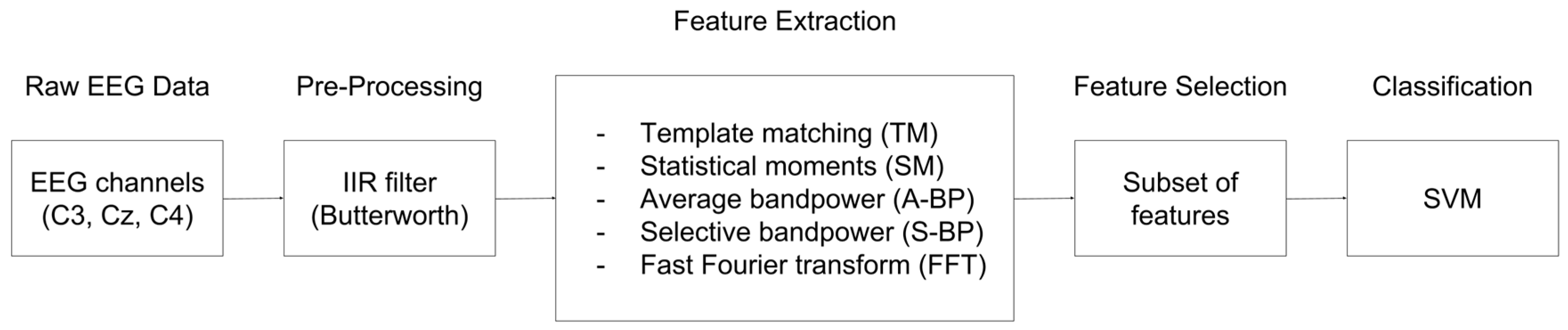
5.2. Data Processing Workflow
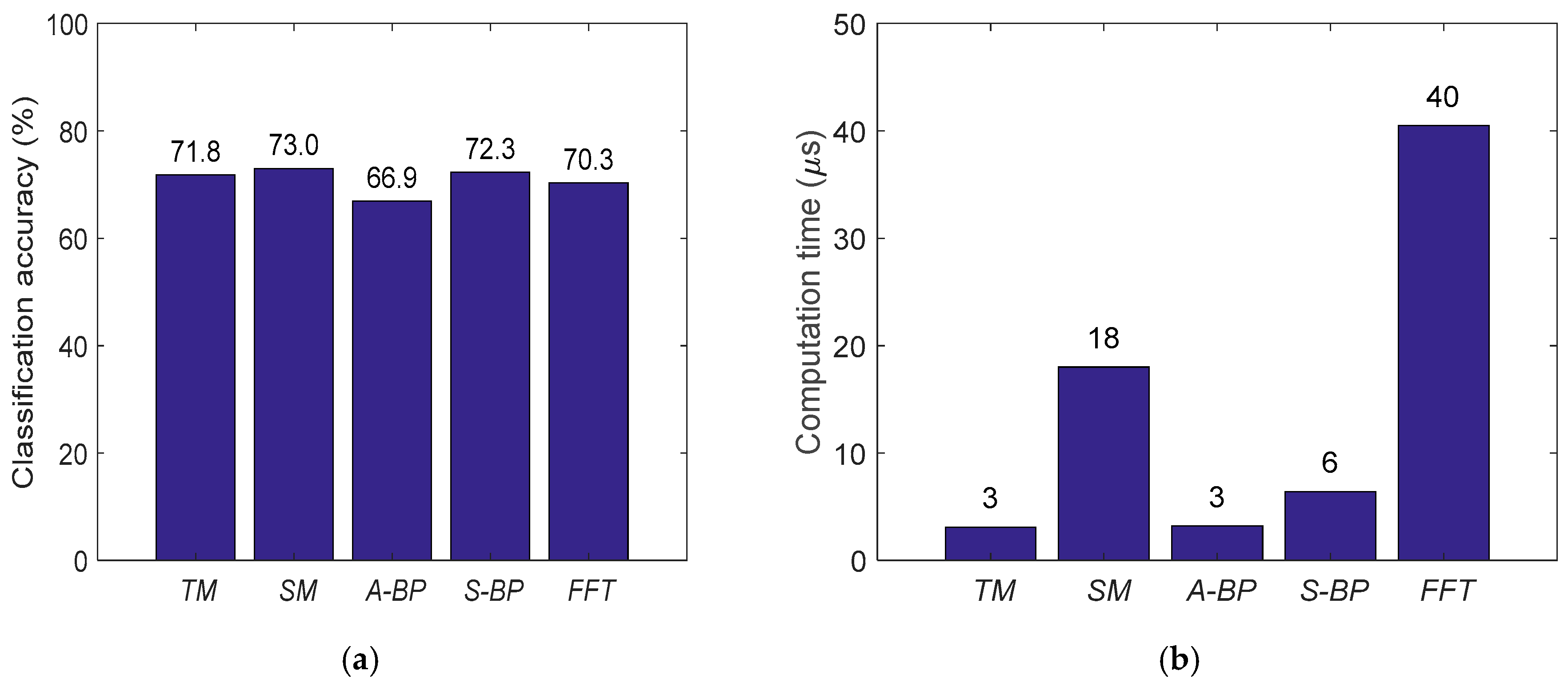
5.3. Performance Comparison
6. Applications
6.1. Biomedical Applications
6.1.1. Replacement and Restoration of CNS
6.1.2. Therapy, Rehabilitation and Assessment
6.1.3. Affective Computing for Biomedical Applications
6.2. Non-Biomedical Applications
6.2.1. Gaming
6.2.2. Industry and Transport
6.2.3. Art
7. Challenges and Future Directions
7.1. Challenges Faced in Research and Development
7.2. Challenges Impeding Commercialization
7.2.1. Technical Barriers to Commercialization
7.2.2. Adapting Lab-Based Technologies for the Wider World
7.3. A Flawed Testing Process
7.4. Issues with BCI Use
7.5. Ethical Issues
Author Contributions
Funding
Conflicts of Interest
References
- Soegaard, M.; Dam, R.F. Human Computer Interaction—Brief intro. In The Encyclopedia of Human-Computer Interaction, 2nd ed.; The Intetraction Design Foundation: Aarhus, Denmark, 2012. [Google Scholar]
- Van Steen, M.; Kristo, G. Contribution to Roadmap. 2015. Available online: https://pdfs.semanticscholar.org/5cb4/11de3db4941d5c7ecfc19de8af9243fb63d5.pdf (accessed on 28 January 2019).
- Baig, M.Z.; Aslam, N.; Shum, H.P.H.; Zhang, L. Differential evolution algorithm as a tool for optimal feature subset selection in motor imagery EEG. Expert Syst. Appl. 2017, 90, 184–195. [Google Scholar] [CrossRef]
- Oikonomou, V.P.; Georgiadis, K.; Liaros, G.; Nikolopoulos, S.; Kompatsiaris, I. A Comparison Study on EEG Signal Processing Techniques Using Motor Imagery EEG Data. In Proceedings of the IEEE 30th International Symposium on Computer-Based Medical Systems (CBMS), Thessaloniki, Greece, 22–24 June 2017. [Google Scholar] [CrossRef]
- Cheng, D.; Liu, Y.; Zhang, L. Exploring Motor Imagery EEG Patterns for Stroke Patients with Deep Neural Networks. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar] [CrossRef]
- Kumar, S.; Sharma, R.; Sharma, A.; Tsunoda, T. Decimation Filter with Common Spatial Pattern and Fishers Discriminant Analysis for Motor Imagery Classification. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016. [Google Scholar] [CrossRef]
- Guo, X.; Wu, X.; Gong, X.; Zhang, L. Envelope Detection Based on Online ICA Algorithm and its Application to Motor Imagery Classification. In Proceedings of the 6th International IEEE/EMBS Conference on Neural Engineering (NER), San Diego, CA, USA, 6–8 November 2013. [Google Scholar] [CrossRef]
- Nijholt, A. The Future of Brain-Computer Interfacing (Keynote Paper). In Proceedings of the 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016. [Google Scholar] [CrossRef]
- Nicolas-Alonso, L.F.; Gomez-Gil, J. Brain computer interfaces, a review. Sensors 2012, 12, 1211–1279. [Google Scholar] [CrossRef] [PubMed]
- Stawicki, P.; Gembler, F.; Rezeika, A.; Volosyak, I. A novel hybrid mental spelling application based on eye tracking and SSVEP-based BCI. Brain Sci. 2017, 7, 35. [Google Scholar] [CrossRef] [PubMed]
- Kevric, J.; Subasi, A. Comparison of signal decomposition methods in classification of EEG signals for motor-imagery BCI system. Biomed. Signal Process. Control 2017, 31, 398–406. [Google Scholar] [CrossRef]
- Caldwell, J.A.; Prazinko, B.; Caldwell, J.L. Body posture affects electroencephalographic activity and psychomotor vigilance task performance in sleep-deprived subjects. Clin. Neurophysiol. 2003, 114, 23–31. [Google Scholar] [CrossRef]
- Thibault, R.T.; Lifshitz, M.; Jones, J.M.; Raz, A. Posture alters human resting-state. Cortex 2014, 58, 199–205. [Google Scholar] [CrossRef]
- Suefusa, K.; Tanaka, T. A comparison study of visually stimulated brain-computer and eye-tracking interfaces. J. Neural Eng. 2017, 14, 036009. [Google Scholar] [CrossRef] [PubMed]
- Speier, W.; Deshpande, A.; Pouratian, N. A method for optimizing EEG electrode number and configuration for signal acquisition in P300 speller systems. Clin. Neurophysiol. 2015, 126, 1171–1177. [Google Scholar] [CrossRef] [PubMed]
- Schreuder, M.; Rost, T.; Tangermann, M. Listen, you are writing! Speeding up online spelling with a dynamic auditory BCI. Front. Neurosci. 2011, 5, 112. [Google Scholar] [CrossRef]
- Chambayil, B.; Singla, R.; Jha, R. Virtual keyboard BCI using Eye blinks in EEG. In Proceedings of the 2010 IEEE 6th International Conference on Wireless and Mobile Computing, Networking and Communications, Niagara Falls, ON, Canada, 11–13 October 2010. [Google Scholar] [CrossRef]
- Tang, Z.; Sun, S.; Zhang, S.; Chen, Y.; Li, C.; Chen, S. A brain-machine interface based on ERD/ERS for an upper-limb exoskeleton control. Sensors 2016, 16, 2050. [Google Scholar] [CrossRef]
- Gembler, F.; Stawicki, P.; Volosyak, I. Autonomous parameter adjustment for SSVEP-based BCIs with a novel BCI wizard. Front. Neurosci. 2015, 9, 474. [Google Scholar] [CrossRef] [PubMed]
- Picton, T. The P300 wave of the human event-related potential. J. Clin. Neurophysiol. 1992, 9, 456–479. [Google Scholar] [CrossRef]
- Andersson, P.; Pluim, J.P.; Siero, J.C.; Klein, S.; Viergever, M.A.; Ramsey, N.F. Real-time decoding of brain responses to visuospatial attention using 7T fMRI. PLoS ONE 2011, 6, e27638. [Google Scholar] [CrossRef] [PubMed]
- Schreuder, M.; Höhne, J.; Blankertz, B.; Haufe, S.; Dickhaus, T.; Tangermann, M. Optimizing event-related potential based brain-computer interfaces: A systematic evaluation of dynamic stopping methods. J. Neural Eng. 2013, 10, 036025. [Google Scholar] [CrossRef] [PubMed]
- Graimann, B.; Allison, B.; Pfurtscheller, G. Brain-computer interfaces: A gentle introduction. In Brain-Computer Interfaces; Springer: Berlin, Germany, 2009; pp. 1–27. [Google Scholar]
- Pfurtscheller, G.; Aranibar, A. Event-related cortical desynchronization detected by power measurements of scalp EEG. Electroencephalogr. Clin. Neurophysiol. 1977, 42, 817–826. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Brunner, C.; Schlogl, A.; da Silva, F.H.L. Mu rhythm (de)synchronization and EEG single-trial classification of different motor imagery tasks. NeuroImage 2006, 31, 153–159. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Bermúdez, G.; García-Laencina, P. Automatic and adaptive classification of electroencephalographic signals for brain computer interfaces. J. Med. Stems 2012, 36, S51–S63. [Google Scholar] [CrossRef]
- Schlögl, A.L.F.; Bischof, H.P.G. Characterization of four-class motor imagery EEG data for the BCI-competition 2005. J. Neural Eng. 2005, 2, L14. [Google Scholar] [CrossRef]
- Zhou, J.; Meng, M.; Gao, Y.; Ma, Y.; Zhang, Q. Classification of Motor Imagery EEG using Wavelet Envelope Analysis and LSTM Networks. In Proceedings of the Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018. [Google Scholar] [CrossRef]
- Hashimoto, Y.; Ushiba, J. EEG-based classification of imaginary left and right foot movements using beta rebound. Clin. Neurophysiol. Pract. 2013, 124, 2153–2160. [Google Scholar] [CrossRef]
- Grosse-Wentrup, M.S.B. A review of performance variations in SMR-based Brain-Computer interfaces (BCIs). In Brain-Computer Interface Research; Springer: Berlin, Germany, 2013; pp. 39–51. [Google Scholar]
- An, X.; Kuang, D.; Guo, X.; Zhao, Y.; He, L. A Deep Learning Method for Classification of EEG Data Based on Motor Imagery. In Proceedings of the International Conference on Intelligent Computing, Taiyuan, China, 3–6 August 2014. [Google Scholar]
- Zich, C.; Debener, S.; Kranczioch, C.; Bleichner, M.G.; Gutberlet, I.; De Vos, M. Real-time EEG feedback during simultaneous EEG–fMRI identifies the cortical signature of motor imagery. NeuroImage 2015, 114, 438–447. [Google Scholar] [CrossRef]
- Marchesotti, S.; Bassolino, M.; Serino, A.; Bleuler, H.; Blanke, O. Quantifying the role of motor imagery in brain-machine interfaces. Sci. Rep. 2016, 6, 24076. [Google Scholar] [CrossRef]
- Pattnaik, S.; Dash, M.; Sabut, S.K. DWT-based feature extraction and classification for motor imaginary EEG signals. In Proceedings of the International Conference on Systems in Medicine and Biology (ICSMB), Kharagpur, India, 4–7 January 2016. [Google Scholar] [CrossRef]
- Hara, Y. Brain plasticity and rehabilitation in stroke. J. Nippon Med. Sch. 2015, 82, 4–13. [Google Scholar] [CrossRef]
- Hsu, W.Y. Enhanced active segment selection for single-trial EEG classification. Clin. EEG Neurosci. 2012, 43, 87–96. [Google Scholar] [CrossRef] [PubMed]
- Patti, C.R.; Penzel, T.; Cvetkovic, D. Sleep spindle detection using multivariate Gaussian mixture models. J. Sleep Res. 2017, 27. [Google Scholar] [CrossRef]
- Lawhern, V.; Kerick, S.; Robbins, K.A. Detecting alpha spindle events in EEG time series using adaptive autoregressive models. BMC Neurosci. 2013, 14, 101. [Google Scholar] [CrossRef]
- Lee, H.; Choi, S. PCA+ HMM+ SVM for EEG Pattern Classification. In Proceedings of the Seventh International Symposium on Signal Processing and Its Applications, Paris, France, 1–4 July 2003. [Google Scholar]
- Gaspar, C.M.; Rousselet, G.A.; Pernet, C.R. Reliability of ERP and single-trial analyses. NeuroImage 2011, 58, 620–629. [Google Scholar] [CrossRef]
- Pernet, C.R.; Sajda, P.; Rousselet, G.A. Single-trial analyses: Why bother? Front. Psychol. 2011, 2, 322. [Google Scholar] [CrossRef] [PubMed]
- Lemm, S.; Blankertz, B.; Curio, G.; Muller, K. Spatio-spectral filters for improving the classification of single trial EEG. IEEE Trans. Biomed. Eng. 2005, 52, 1541–1548. [Google Scholar] [CrossRef] [PubMed]
- Sornmo, L.; Laguna, P. Bioelectrical Signal Processing in Cardiac and Neurological Applications, 1st ed.; Academic Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Kevric, J.; Subasi, A. The effect of multiscale PCA de-noising in epileptic seizure detection. J. Med. Syst. 2014, 38, 131. [Google Scholar] [CrossRef]
- Kevric, J.; Subasi, A. The impact of MSPCA signal de-Noising in real-Time wireless brain computer interface system. Southeast Eur. J. Soft Comput. 2015, 4. [Google Scholar] [CrossRef]
- Novi, Q.; Cuntai, G.; Dat, T.H.; Xue, P. Sub-Band Common Spatial Pattern (SBCSP) for Brain-Computer Interface. In Proceedings of the 3rd International IEEE/EMBS Conference on Neural Engineering, Kohala Coast, HI, USA, 2–5 May 2007. [Google Scholar] [CrossRef]
- Kumar, S.; Sharma, A.; Tatsuhiko, T. An Improved Discriminative Filter Bank Selection Approach for Motor Imagery EEG Signal Classification using Mutual Information. In Proceedings of the 16th International Conference on Bioinformatics (InCoB 2017): Bioinformatics, Shenzhen, China, 20–22 September 2017. [Google Scholar] [CrossRef]
- Ang, K.; Chin, Z.Y.; Zhang, H.; Guan, C. Filter Bank Common Spatial Pattern (FBCSP) in Brain-Computer Interface. In Proceedings of the IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–8 June 2008. [Google Scholar] [CrossRef]
- Hu, Z.; Chen, G.; Chen, C.; Xu, H.; Zhang, J. A new EEG feature selection method for self-paced brain-computer interface. In Proceedings of the 10th International Conference on Intelligent Systems Design and Applications, Cairo, Egypt, 29 November–1 December 2010. [Google Scholar]
- Zhang, Y.; Wang, Y.; Jin, J.; Wang, X. Sparse Bayesian learning for obtaining sparsity of EEG frequency bands based feature vectors in motor imagery classification. Int. J. Neural Syst. 2017, 27, 1650032. [Google Scholar] [CrossRef]
- Ilyas, M.Z.; Saad, P.; Ahmad, M.I.; Ghani, A.R.I. Classification of EEG signals for brain-computer interface applications: Performance comparison. In Proceedings of the 6th International IEEE/EMBS Conference on Neural Engineering (NER), Ayer Keroh, Malaysia, 5–6 November 2016. [Google Scholar] [CrossRef]
- Gajic, D.; Djurovic, Z.; Gennaro, S.D.; Gustafsson, F. Classification of EEG signals for detection of epileptic seizures based on wavelets and statistical pattern recognition. Biomed. Eng. 2014, 26. [Google Scholar] [CrossRef]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep learning with convolutional neural networks for EEG decoding and visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef]
- Tang, Z.; Li, C.; Sun, S. Single-trial EEG classification of motor imagery using deep convolutional neural networks. Optik 2017, 130, 11–18. [Google Scholar] [CrossRef]
- Tabar, Y.; Halici, U. A novel deep learning approach for classification of EEG motor imagery signals. J. Neural Eng. 2017, 14, 016003. [Google Scholar] [CrossRef] [PubMed]
- Bashivan, P.; Rish, I.; Yeasin, M.; Codella, N. Learning representations from EEG with deep recurrent-convolutional neural network. arXiv, 2015; arXiv:1511.06448. [Google Scholar]
- Zhang, B. Feature selection based on sensitivity using evolutionary neural network. In Proceedings of the 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010. [Google Scholar] [CrossRef]
- Yang, H.; Sakhavi, S.; Ang, K.K.; Guan, C. On the Use of Convolutional Neural Networks and Augmented CSP Features for Multi-Class Motor Imagery of EEG Signals Classification. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Allison, B.Z.; Bauernfeind, G.; Brunner, C.; Solis Escalante, T.; Scherer, R.; Zander, T.O.; Mueller-Putz, G.; Neuper, C.; Birbaumer, N. The hybrid BCI. Front. Neurosci. 2010, 4, 3. [Google Scholar] [CrossRef] [PubMed]
- Yu, T.; Xiao, J.; Wang, F.; Zhang, R.; Gu, Z.; Cichocki, A.; Li, Y. Enhanced motor imagery training using a hybrid BCI with feedback. IEEE Trans. Biomed. Eng. 2015, 62, 1706–1717. [Google Scholar] [CrossRef] [PubMed]
- Koo, B.; Lee, H.G.; Nam, Y.; Kang, H.; Koh, C.S.; Shin, H.C.; Choi, S. A hybrid NIRS-EEG system for self-paced brain computer interface with online motor imagery. J. Neurosci. Methods 2015, 244, 26–32. [Google Scholar] [CrossRef]
- Yao, L.; Meng, J.; Zhang, D.; Sheng, X.; Zhu, X. Combining motor imagery with selective sensation toward a hybrid-modality BCI. IEEE Trans. Biomed. Eng. 2014, 61, 2304–2312. [Google Scholar] [CrossRef]
- BBCI. Data Set IVa ‹Motor Imagery, Small Training Sets›. Available online: http://www.bbci.de/competition/iii/desc_IVa.html (accessed on 28 February 2019).
- Blankertz, B.; Müller, K.-R.; Curio, G.; Vaughan, T.M.; Schalk, G.; Wolpaw, J.R.; Schlögl, A.; Neuper, C.; Pfurtscheller, G.; Hinterberger, T.; et al. The BCI competition 2003. IEEE Trans. Biomed. Eng. 2004, 51, 1044–1051. [Google Scholar] [CrossRef]
- Yu, X.; Chum, P.; Sim, K.B. Analysis the effect of PCA for feature reduction in non-stationary EEG based motor imagery of BCI system. Optik 2014, 125, 1498–1502. [Google Scholar] [CrossRef]
- Krusienski, D.J.; McFarland, D.J.; Wolpaw, J.R. An Evaluation of Autoregressive Spectral Estimation Model Order for Brain-Computer Interface Applications. In Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C.; Guger, C.; Harkam, W.; Ramoser, H.; Schlogl, A.; Obermaier, B.; Pregenzer, M. Current trends in Graz brain-computer interface (BCI) research. IEEE Trans. Rehabil. Eng. 2000, 8, 216–219. [Google Scholar] [CrossRef]
- Schloegl, A.; Lugger, K.; Pfurtscheller, G. Using Adaptive Autoregressive Parameters for a Brain-Computer-Interface Experiment. In Proceedings of the 19th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 30 October–2 November 1997. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C.; Flotzinger, D.; Pregenzer, M. EEG-based discrimination between imagination of right and left hand movement. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 642–651. [Google Scholar] [CrossRef]
- Schlögl, A. The Electroencephalogram and the Adaptive Autoregressive Model: Theory and Applications. Ph.D. Thesis, Technischen Universität Graz, Graz, Austria, April 2000. [Google Scholar]
- Hamedi, M.; Salleh, S.H.; Noor, A.M.; Mohammad-Rezazadeh, I. Neural Network-based Three-Class Motor Imagery. In Proceedings of the 2014 IEEE Region 10 Symposium, Kuala Lumpur, Malaysia, 14–16 April 2014. [Google Scholar] [CrossRef]
- Batres-Mendoza, P.; Montoro-Sanjose, C.; Guerra-Hernandez, E.; Almanza-Ojeda, D.; Rostro-Gonzalez, H.; Romero-Troncoso, R.; Ibarra-Manzano, M. Quaternion-based signal analysis for motor imagery classification from electroencephalographic signals. Sensors 2016, 16, 336. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, A. Power Spectral Entropy Analysis of EEG Signal Based-on BCI. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013. [Google Scholar]
- Liu, A.; Chen, K.; Liu, Q.; Ai, Q.; Xie, Q.; Chen, A. Feature selection for motor imagery EEG classification based on firefly algorithm and learning automata. Sensors 2017, 17, 2576. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Li, X.; Li, H.; Shao, C.; Ying, L.; Wu, S. Feature extraction of motor imagery electroencephalography based on time-frequency-space domains. J. Biomed. Eng. 2014, 31, 955–961. [Google Scholar]
- Xu, B.G.; Song, A.G.; Fei, S.M. Feature extraction and classification of EEG in online brain-computer interface. Acta Electron. Sin. 2011, 39, 1025–1030. [Google Scholar]
- Day, T.T. Applying a locally linear embedding algorithm for feature extraction and visualization of MI-EEG. J. Sens. 2016, 2016, 7481946. [Google Scholar] [CrossRef]
- Graps, A. An introduction to wavelets. Comput. Sci. Eng. 1995, 2, 50–61. [Google Scholar] [CrossRef]
- Kutlu, Y.; Kuntalp, D. Feature extraction for ECG heartbeats using higher order statistics of WPD coefficients. Comput. Methods Programs Biomed. 2012, 105, 257–267. [Google Scholar] [CrossRef] [PubMed]
- Unser, M.; Aldroubi, A. A review of wavelets in biomedical applications. Proc. IEEE 1996, 84, 626–638. [Google Scholar] [CrossRef]
- Zazo, R.; Lozano-Diez, A.; Gonzalez-Dominguez, J.; Toledano, D.T.; Gonzalez-Rodriguez, J. Language identification in short utterances using long short-term memory (LSTM) recurrent neural networks. PLoS ONE 2016, 11, e0146917. [Google Scholar] [CrossRef] [PubMed]
- How, D.N.T.; Loo, C.K.; Sahari, K.S.M. Behavior recognition for humanoid robots using long short-term memory. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Zhai, C.; Chen, Z.; Li, J.; Xu, B. Chinese Image Text Recognition with BLSTM-CTC: A Segmentation-Free Method. In Proceedings of the 7th Chinese Conference on Pattern Recognition (CCPR), Chengdu, China, 5–7 November 2016. [Google Scholar] [CrossRef]
- Li, M.; Chen, W.; Zhang, T. Classification of epilepsy EEG signals using DWT-based envelope analysis and neural network ensemble. Biomed. Signal Process. Control 2017, 31, 357–365. [Google Scholar] [CrossRef]
- Clerico, A.; Gupta, R.; Falk, T.H. Mutual Information between Inter-Hemispheric EEG Spectro-Temporal Patterns: A New Feature for Automated Affect Recognition. In Proceedings of the 7th International IEEE/EMBS Conference on Neural Engineering (NER), Montpellier, France, 22–24 April 2015. [Google Scholar] [CrossRef]
- Yang, B.; Li, H.; Wang, Q.; Zhang, Y. Subject-based feature extraction by using fisher WPD-CSP in brain–computer interfaces. Comput. Methods Prog. Biomed. 2016, 129, 21–28. [Google Scholar] [CrossRef]
- Wei, Q.; Wei, Z. Binary particle swarm optimization for frequency band selection in motor imagery based brain-computer interfaces. Biomed. Mater. Eng. 2015, 26, S1523–S1532. [Google Scholar] [CrossRef] [PubMed]
- Higashi, H.; Tanaka, T. Simultaneous design of FIR filter banks and spatial patterns for EEG signal classification. IEEE Trans. Biomed. Eng. 2013, 60, 1100–1110. [Google Scholar] [CrossRef] [PubMed]
- Wankar, R.V.; Shah, P.; Sutar, R. Feature extraction and selection methods for motor imagery EEG signals: A review. In Proceedings of the International Conference on Intelligent Computing and Control (I2C2), Tamil Nadu, India, 23–24 June 2017. [Google Scholar] [CrossRef]
- Dornhege, G.; Blankertz, B.; Krauledat, M.L.F.; Curio, G.; Muller, K.R. Combined optimization of spatial and temporal filters for improving brain-computer interfacing. IEEE Trans. Biomed. Eng. 2006, 53, 2274–2281. [Google Scholar] [CrossRef]
- Lones, M.A. Metaheuristics in Nature-Inspired Algorithms. In Proceedings of the Genetic and Evolutionary Computation Conference’14, Vancouver, BC, Canada, 12–16 July 2014. [Google Scholar]
- Thomas, K.P.; Guam, C.; Lau, C.T.; Vinod, A.P.; Keng, K. A new discriminative common spatial pattern method for motor imagery brain computer interfaces. IEEE Trans. Biomed. Eng. 2009, 56, 2730–2733. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, G.; Jin, J.; Wang, X.; Cichocki, A. Optimizing spatial patterns with sparse filter bands for motor-imagery based brain-computer interface. J. Neurosci. Methods 2015, 255, 85–91. [Google Scholar] [CrossRef]
- Kennedy, J. Particle swarm optimization. In Encyclopedia of Machine Learning; Springer: Berlin, Germany, 2011; pp. 760–766. [Google Scholar]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential evolution algorithm with strategy adaptation for global numerical optimization. IEEE Trans. Evol. Comput. 2009, 13, 398–417. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report, Technical Report-tr06; Computer Engineering Department, Engineering Faculty, Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Herman, P.; Prasad, G.; McGinnity, T.M.; Coyle, D. Comparative analysis of spectral approaches to feature extraction for EEG-based motor imagery classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 317–326. [Google Scholar] [CrossRef] [PubMed]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; pp. 9, 21, 189, 225, 292, 336. [Google Scholar]
- Sohaib, A.; Qureshi, S.; Hagelbäck, J.; Hilbom, O.; Jerčić, P.; Schmorrow, D.; Fidopiastis, C. Evaluating Classifiers for Emotion Recognition Using EEG. In Proceedings of the Foundations of Augmented Cognition, Las Vegas, NV, USA, 21–26 July 2013. [Google Scholar]
- Lu, N.; Li, T.; Ren, X.; Miao, H. A deep learning scheme for motor imagery classification based on restricted boltzmann machines. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 566–576. [Google Scholar] [CrossRef]
- Nauck, D.; Kruse, R. Obtaining interpretable fuzzy classification rules from medical data. Artif. Intell. Med. 1999, 16, 149–169. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Y.; Ouyang, G. Adaptive neuro-fuzzy inference system for classification of background EEG signals from ESES patients and controls. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef]
- Herman, P.A.; Prasad, G.; McGinnity, T.M. Designing an interval type-2 fuzzy logic system for handling uncertainty effects in brain–computer interface classification of motor imagery induced EEG patterns. IEEE Trans. Fuzzy Syst. 2017, 25, 29–42. [Google Scholar] [CrossRef]
- Jiang, Y.; Deng, Z.; Chung, F.L.; Wang, G.; Qian, P.; Choi, K.S. Recognition of epileptic EEG signals using a novel multiview TSK fuzzy system. IEEE Trans. Fuzzy Syst. 2017, 25, 3–20. [Google Scholar] [CrossRef]
- Yoo, B.S.; Kim, J.H. Fuzzy integral-based gaze control of a robotic head for human robot interaction. IEEE Trans. Cybern. 2015, 45, 1769–1783. [Google Scholar] [CrossRef]
- Dai, M.; Zheng, D.; Na, R.; Wang, S.; Zhang, S. EEG Classification of Motor Imagery Using a Novel Deep Learning Framework. Sesnors 2019, 19, 551. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, A.; Yosinski, J.; Clune, J. Deep neural networks are easily fooled: High confidence predictions for unrecognizable images. In Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. In The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1995; Volume 3361. [Google Scholar]
- Al Rahhal, M.M.; Bazi, Y.; AlHichri, H.; Alajlan, N.; Melgani, F.; Yager, R.R. Deep learning approach for active classification of electrocardiogram signals. Inf. Sci. 2016, 345, 340–354. [Google Scholar] [CrossRef]
- Habermann, M.; Fremont, V.; Shiguemori, E.H. Feature selection for hyperspectral images using single-layer neural networks. In Proceedings of the 8th International Conference of Pattern Recognition Systems (ICPRS 2017), Madrid, Spain, 11–13 July 2017. [Google Scholar]
- Verikas, A.; Bacauskiene, M. Feature selection with neural networks. Pattern Recognit. Lett. 2002, 23, 1323–1335. [Google Scholar] [CrossRef]
- Setiono, R.; Liu, H. Neural-Network Feature Selector. IEEE Trans. Neural Netw. 1997, 8, 654–662. [Google Scholar] [CrossRef]
- Syafiandini, A.F.; Wasito, I.; Yazid, S.; Fitriawan, A.; Amien, M. Multimodal Deep Boltzmann Machines for Feature Selection on Gene Expression Data. In Proceedings of the 2016 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Malang, Indonesia, 15–16 October 2016. [Google Scholar] [CrossRef]
- Ruangkanokmas, P.; Achalakul, T.; Akkarajitsakul, K. Deep belief networks with feature selection for sentiment classification. In Proceedings of the 7th International Conference on Intelligent Systems, Modelling and Simulation (ISMS), Bangkok, Thailand, 25–27 January 2016. [Google Scholar]
- IEEE Brain (brain.ieee.org). Competitions & Challenges. Available online: https://brain.ieee.org/competitions-challenges/ (accessed on 17 January 2019).
- Arnin, J.; Kahani, D.; Lakany, H.; Conway, B.A. Evaluation of Different Signal Processing Methods in Time and Frequency Domain for Brain-Computer Interface Applications. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018. [Google Scholar] [CrossRef]
- BNCI Horizon 2020. Data Sets. Available online: http://bnci-horizon-2020.eu/database/data-sets (accessed on 17 January 2019).
- Leeb, R.; Lee, F.; Keinrath, C.; Scherer, R.; Bischof, H.; Pfurtscheller, G. Brain-computer communication: Motivation, aim, and impact of exploring a virtual apartment. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 473–482. [Google Scholar] [CrossRef]
- Aarabi, A.; Kazemi, K.; Grebe, R.; Moghaddam, H.A.; Wallois, F. Detection of EEG transients in neonates and older children using a system based on dynamic time-warping template matching and spatial dipole clustering. NeuroImage 2009, 48, 50–62. [Google Scholar] [CrossRef]
- Qu, H.; Gotman, J. A patient-specific algorithm for the detection of seizure onset in long-term EEG monitoring: Possible use as a warning device. IEEE Trans. Biomed. Eng. 1997, 44, 115–122. [Google Scholar] [CrossRef] [PubMed]
- Bin, G.; Gao, X.; Wang, Y.; Li, Y.; Hong, B.; Gao, S. A high-speed BCI based on code modulation VEP. J. Neural. Eng. 2011, 8. [Google Scholar] [CrossRef] [PubMed]
- Soliman, S.S.; Hsue, S.-Z. Signal classification using statistical moments. IEEE Trans. Commun. 1992, 40, 908–916. [Google Scholar] [CrossRef]
- Alam, S.M.S.; Bhuiyan, M.I.H. Detection of seizure and epilepsy using higher order statistics in the EMD domain. IEEE J. Biomed. Health Inform. 2013, 17, 312–318. [Google Scholar] [CrossRef]
- Hassan, A.R.; Haque, M.A. Epilepsy and seizure detection using Statistical Features in the Complete Ensemble Empirical Mode Decomposition Domain. In Proceedings of the TENCON 2015 IEEE Region 10 Conference, Macao, China, 1–4 November 2015. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C.; Schlogl, A.; Lugger, K. Separability of EEG signals recorded during right and left motor imagery using adaptive autoregressive parameters. IEEE Trans. Rehabil. Eng. 1998, 6, 316–325. [Google Scholar] [CrossRef]
- Klimesch, K.; Russegger, H.; Doppelmayr, M.; Pachinger, T. A method for the calculation of induced band power: Implications for the significance of brain oscillations. Electroencephalogr. Clin. Neurophysiol. 1998, 108, 123–130. [Google Scholar] [CrossRef]
- Palaniappan, R. Brain Computer Interface Design using Band Powers Extracted during Mental Tasks. In Proceedings of the 2005 2nd International IEEE EMBS Conference on Neural Engineering, Arlington, VA, USA, 16–19 March 2005. [Google Scholar] [CrossRef]
- Ko, K.-E.; Yang, H.-C.; Sim, K.-B. Emotion recognition using EEG signals with relative power values and Bayesian network. Int. J. Control Autom. Syst. 2009, 7, 865–870. [Google Scholar] [CrossRef]
- Ryu, C.S.; Park, S.H.; Kim, S.H. Method for Determining Positive and Negative Emotional States by Electroencephalogram (EEG). U.S. Patent US6,021,346A, 1 February 2000. [Google Scholar]
- Lehmann, C.; Koenig, T.; Jelic, V.; Prichep, L.; John, R.E.; Wahlund, L.O.; Dodge, Y.; Dierks, T. Application and comparison of classification algorithms for recognition of Alzheimer’s disease in electrical brain activity (EEG). J. Neurosci. Methods 2007, 161, 342–350. [Google Scholar] [CrossRef] [PubMed]
- Bright, D.; Nair, A.; Salvekar, D.; Bhisikar, S. EEG-Based Brain Controlled Prosthetic Arm. In Proceedings of the 2016 Conference on Advances in Signal Processing (CASP), Pune, India, 9–11 June 2016. [Google Scholar] [CrossRef]
- Müller-Putz, G.R.; Pfurtscheller, G. Control of an electrical prosthesis with an SSVEP-based BCI. IEEE Trans. Biomed. Eng. 2008, 55, 361–364. [Google Scholar] [CrossRef]
- Elstob, D.; Secco, E.L. A low cost EEG based BCI prosthetic using motor imagery. Int. J. Inf. Technol. Converg. Serv. 2016, 6. [Google Scholar] [CrossRef]
- Müller-Putz, G.; Ofner, P.; Schwarz, A.; Pereira, J.; Luzhnica, G.; di Sciascio, C.; Veas, E.; Stein, S.; Williamson, J.; Murray-Smith, R. Moregrasp: Restoration of Upper Limb Function in Individuals with High Spinal Cord Injury by Multimodal Neuroprostheses for Interaction in Daily Activities. In Proceedings of the 7th Graz Brain-Computer Interface Conference, Graz, Austria, 18–22 September 2017. [Google Scholar]
- Athanasiou, A.; Xygonakis, I.; Pandria, N.; Kartsidis, P.; Arfaras, G.; Kavazidi, K.R.; Foroglou, N.; Astaras, A.; Bamidis, P.D. Towards rehabilitation robotics: Off-the-shelf BCI control of anthropomorphic robotic arms. BioMed Res. Int. 2017. [Google Scholar] [CrossRef] [PubMed]
- Voznenko, T.I.; Chepin, E.V.; Urvanov, G.A. The Control System Based on Extended BCI for a Robotic Wheelchair. Procedia Comput. Sci. 2018, 123, 522–527. [Google Scholar] [CrossRef]
- Chella, A.; Pagello, E.; Menegatti, E.; Sorbello, R.; Anzalone, S.M.; Cinquegrani, F.; Tonin, L.; Piccione, F. A BCI Teleoperated Museum Robotic Guide. In Proceedings of the International Conference on Complex, Intelligent and Software Intensive Systems, Fukuoka, Japan, 16–19 March 2009. [Google Scholar] [CrossRef]
- Gomez-Rodriguez, M.; Grosse-Wentrup, M.; Hill, J.; Gharabaghi, A.; Schölkopf, B.; Peters, J. Towards Brain-Robot Interfaces in Stroke Rehabilitation. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 27 June–1 July 2011. [Google Scholar] [CrossRef]
- Abiri, R.; Zhao, X.; Heise, G.; Jiang, Y.; Abiri, F. Brain Computer Interface for Gesture Control of a Social Robot: An Offline Study. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017. [Google Scholar] [CrossRef]
- Luu, T.P.; Nakagome, S.; He, Y.; Contreras-Vidal, J.L. Real-time EEG-based brain-computer interface to a virtual avatar enhances cortical involvement in human treadmill walking. Sci. Rep. 2017, 7, 8895. [Google Scholar] [CrossRef]
- McMahon, M.; Schukat, M. A Low-Cost, Open-Source, BCI-VR Prototype for Real-Time Signal Processing of EEG to Manipulate 3D VR Objects as a Form of Neurofeedback. In Proceedings of the 29th Irish Signals and Systems Conference (ISSC), Belfast, Ireland, 21–22 June 2018. [Google Scholar]
- Perales, F.A.E. Combining EEG and serious games for attention assessment of children with cerebral palsy. In Converging Clinical and Engineering Research on Neurorehabilitation II; Springer: Cham, Switzerland, 2017; Volume 15, pp. 395–399. [Google Scholar] [CrossRef]
- Shim, M.; Hwang, H.-J.; Kim, D.-W.; Lee, S.-H.; Im, C.-H. Machine-learning-based diagnosis of schizophrenia using combined sensor-level and source-level EEG features. Schizophr. Res. 2016, 176, 314–319. [Google Scholar] [CrossRef]
- Ehrlich, S.; Guan, C.; Cheng, G. A Closed-Loop Brain-Computer Music Interface for Continuous Affective Interaction. In Proceedings of the 2017 International Conference on Orange Technologies (ICOT), Singapore, 8–10 December 2017. [Google Scholar] [CrossRef]
- Placidi, G.; Cinque, L.; Di Giamberardino, P.; Iacoviello, D.; Spezialetti, M. An Affective BCI Driven by Self-induced Emotions for People with Severe Neurological Disorders. In Proceedings of the International Conference on Image Analysis and Processing, Catania, Italy, 11–15 September 2017. [Google Scholar]
- Ortiz-Rosario, A.; Berrios-Torres, I.; Adeli, H.; Buford, J.A. Combined corticospinal and reticulospinal effects on upper limb muscles. Neurosci. Lett. 2014, 561, 30–34. [Google Scholar] [CrossRef] [PubMed]
- Kerous, B.; Skola, F.; Liarokapis, F. EEG-based BCI and video games: A progress report. Virtual Real. 2017, 22, 119–135. [Google Scholar] [CrossRef]
- Edlinger, G.; Güger, C. Social Environments, Mixed Communication and Goal-Oriented Control Application using a Brain–Computer Interface. In Proceedings of the International Conference on Universal Access in Human-Computer Interaction, Orlando, FL, USA, 9–14 July 2011. [Google Scholar]
- Maby, E.; Perrin, M.; Bertrand, O.; Sanchez, G.; Mattout, J. BCI could make old two-player games even more fun: A proof of concept with connect four. Adv. Hum.-Comput. Interact. 2012, 2012. [Google Scholar] [CrossRef]
- Van de Laar, B.; Reuderink, B.; Bos, D.P.-O.; Heylen, D. Evaluating user experience of actual and imagined movement in BCI gaming. In Interdisciplinary Advancements in Gaming, Simulations and Virtual Environments: Emerging Trends; IGI Global: Hershey, PA, USA, 2012; pp. 266–280. [Google Scholar] [CrossRef]
- Kawala-Janik, A.; Podpora, M.; Gardecki, A.; Czuczwara, W.; Baranowski, J.; Bauer, W. Game Controller Based on Biomedical Signals. In Proceedings of the 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015. [Google Scholar] [CrossRef]
- Martišius, I.; DamaševiIius, R. A prototype SSVEP based real time BCI gaming system. Comput. Intell. Neurosci. 2016, 18. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, Y.; Xu, M.; Liu, Y.; Yin, E.; Zhou, Z. Towards a hybrid BCI gaming paradigm based on motor imagery and SSVEP. Int. J. Hum. Comput. Interact. 2018. [Google Scholar] [CrossRef]
- Stein, A.; Yotam, Y.; Puzis, R.; Shani, G. EEG-triggered dynamic difficulty adjustment for multiplayer games. Entertain Comput. 2018, 25, 14–25. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, J.; Fuhlbrigge, T. A Review of the Commercial Brain-Computer Interface Technology from Perspective of Industrial Robotics. In Proceedings of the 2010 IEEE International Conference on Automation and Logistics, Hong Kong and Macau, China, 16–20 August 2010. [Google Scholar] [CrossRef]
- Liu, Y.-T.; Wu, S.-L.; Chou, K.-P.; Lin, Y.-Y.; Lu, J.; Zhang, G.; Lin, W.-C.; Lin, C.-T. Driving Fatigue Prediction with Pre-Event Electroencephalography (EEG) via a Recurrent Fuzzy Neural Network. In Proceedings of the 2016 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver, BC, Canada, 24–29 July 2016. [Google Scholar] [CrossRef]
- Binias, B.; Myszor, D.; Cyran, K. A machine learning approach to the detection of pilot’s reaction to unexpected events based on EEG signals. Comput. Intell. Neurosci. 2018, 2018. [Google Scholar] [CrossRef]
- Wadeson, A.; Nijholt, A.; Nam, C.S. Artistic brain-computer interfaces: State-of-the-art control mechanisms. Brain Comput. Interfaces 2015, 2, 70–75. [Google Scholar] [CrossRef]
- Miranda, E.R.; Durrant, S.J.; Anders, T. Towards Brain-Computer Music Interfaces: Progress and Challenges. In Proceedings of the First International Symposium on Applied Sciences on Biomedical and Communication Technologies, Aalborg, Denmark, 25–28 October 2008. [Google Scholar] [CrossRef]
- Todd, D.; McCullagh, P.J.; Mulvenna, M.D.; Lightbody, G. Investigating the Use of Brain-Computer Interaction to Facilitate Creativity. In Proceedings of the 3rd Augmented Human International Conference, Megève, France, 8–9 March 2012. [Google Scholar] [CrossRef]
- Van De Laar, B.; Brugman, I.; Nijboer, F.; Poel, M.; Nijholt, A. BrainBrush, a Multimodal Application for Creative Expressivity. In Proceedings of the Sixth International Conference on Advances in Computer-Human Interactions (ACHI 2013), Nice, France, 24 February–1 March 2013. [Google Scholar]
- Singh, A.; Lal, S.; Guesgen, H.W. Reduce Calibration Time in Motor Imagery Using Spatially Regularized Symmetric Positives-Definite Matrices Based Classification. Sensors 2019, 19, 379. [Google Scholar] [CrossRef] [PubMed]
- Vansteensel, M.J.; Kristo, G.; Aarnoutse, E.J.; Ramsey, N.F. The brain-computer interface researcher’s questionnaire: From research to application. Brain Comput. Interfaces 2017, 4, 236–247. [Google Scholar] [CrossRef]
- Speier, W.; Fried, I.; Pouratian, N. Improved P300 speller performance using electrocorticography, spectral features, and natural language processing. Clin. Neurophysiol. 2013, 124, 1321–1328. [Google Scholar] [CrossRef]
- Tavares, N.G.; Gad, R. Steady-state eisual evoked potential-based real-time BCI for smart appliance control. In Cognitive Informatics and Soft Computing; Springer: Singapore, 2019; pp. 795–805. [Google Scholar] [CrossRef]
- Bhemjibhaih, D.P.; Sanjay, G.D.; Sreejith, V.; Prakash, B. Brain-Computer Interface Based Home Automation System for Paralysed People. In Proceedings of the 2018 IEEE Recent Advances in Intelligent Computational Systems (RAICS), Thiruvananthapuram, India, 6–8 December 2018. [Google Scholar] [CrossRef]
- Andujar, M.; Gilbert, J.E. Let’s Learn! Enhancing User’s Engagement Levels through Passive Brain-Computer Interfaces. In Proceedings of the CHI’13 Extended Abstracts on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013. [Google Scholar] [CrossRef]
- Veryzer, R.W.; de Mozota, B. The impact of user-oriented design on new product development: An examination of fundamental relationships. J. Prod. Innov. Manag. 2005, 22, 128–143. [Google Scholar] [CrossRef]
- Lazard, A.J.; Watkins, I.; Mackert, M.S.; Xie, B.; Stephens, K.K.; Shalev, H. Design simplicity influences patient portal use: The role of aesthetic evaluations for technology acceptance. JAMIA Open 2015, 23, e157–e161. [Google Scholar] [CrossRef] [PubMed]
- Mackelprang, A.W.; Habermann, M.; Swink, M. How firm innovativeness and unexpected product reliability failures affect profitability. JOM 2015, 38, 71–86. [Google Scholar] [CrossRef]
- Neumann, P.J.; Weinstein, M.C. The Diffusion of New Technology: Costs and Benefits to Health Care. In The Changing Economics of Medical Technology; National Academies Press: Washington, DC, USA, 1991. [Google Scholar]
- Mathewson, K.E.; Harrison, T.J.; Kizuk, S.A. High and dry? Comparing active dry EEG electrodes to active and passive wet electrodes. Psychophysiology 2017, 54, 74–82. [Google Scholar] [CrossRef] [PubMed]
- Kam, J.W.Y.; Griffin, S.; Shen, A.; Patel, S.; Hinrichs, H.; Deouell, L.Y.; Knight, R.T. Systematic comparison between a wireless EEG system with dry electrodes and a wired EEG system with wet electrodes. NeuroImage 2019, 184, 119–129. [Google Scholar] [CrossRef] [PubMed]
- Mihajlovic, V.; Garcia Molina, G.; Peuscher, J. To what extent can dry and water-based EEG electrodes replace conductive gel ones? A steady state visual evoked potential brain-computer interface case study. In Proceedings of the ICBE 2011: International Conference on Biomedical Engineering, Venice, Italy, 23–25 November 2011. [Google Scholar]
- Jurvsta, F.; van de Borne, P.; Migeotte, P.F.; Dumont, M.; Languart, J.P.; Deguate, J.P.; Linkowski, P. A study of the dynamic interactions between sleep EEG and heart rate variability in healthy young men. Clin. Neurophysiol. 2003, 114, 2146–2155. [Google Scholar] [CrossRef]
- Seo, S.H.; Lee, J.T. Stress and EEG. In Convergence and Hybrid Information Technologies; InTech: Vienna, Austria, 2010; pp. 420–422. [Google Scholar]
- Burlaka, S.; Gontean, A. Brain-Computer Interface Review. In Proceedings of the 12th IEEE International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 27–28 October 2016. [Google Scholar]
- BNCI Horizon 2020. Roadmap. Available online: http://bnci-horizon-2020.eu/roadmap (accessed on 21 December 2018).
- Lee, B.; Liu, C.Y.; Apuzzo, M.L.J. A primer on brain-machine interfaces, concepts, and technology: A key element in the future of functional neurorestoration. World Neurosurg. 2013, 79, 457–471. [Google Scholar] [CrossRef] [PubMed]
- Chao, Z.C.; Nagsaka, Y.; Fuji, N. Long-term asynchronous decoding of arm motion. Front. Neuroeng. 2010, 3. [Google Scholar] [CrossRef]
- Scherer, R.; Faller, J.; Friedrich, E.V.C.; Opisso, E.; Costa, U.; Kübler, A.; Müller-Putz, G.R. Individually adapted imagery improves brain-computer interface performance in end-users with disability. PLoS ONE 2015, 10, e0123727. [Google Scholar] [CrossRef]
- Ang, K.K.; Guan, C.; Chua, K.S.G.; Ang, B.T.; Kuah, C.; Wang, C.; Phua, K.S.; Chin, Z.Y.; Zhang, H. Clinical study of neurorehabilitation in stroke using EEG-based motor imagery brain-computer interface with robotic feedback. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010. [Google Scholar] [CrossRef]
- Ang, K.K.; Chua, K.S.G.; Phua, K.S.; Wang, C.; Chin, Z.Y.; Kuah, C.W.K.; Low, G.C. A randomized controlled trial of EEG-based motor imagery brain-computer interface robotic rehabilitation for stroke. Clin. EEG Neurosci. 2015, 46, 310–320. [Google Scholar] [CrossRef] [PubMed]
- Shahid, S.; Sinha, R.K.; Prasad, G. Mu and beta rhythm modulations in motor imagery related post-stroke EEG: A study under BCI framework for post-stroke rehabilitation. BMC Neurosci. 2010, 11, P127. [Google Scholar] [CrossRef]
- Geronimo, A.; Simmons, S.S. Performance predictors of brain–computer interfaces in patients with amyotrophic lateral sclerosis. J. Neural Eng. 2016, 13, 026002. [Google Scholar] [CrossRef]
- Meng, J.; Mundahl, J.H.; Streitz, T.D.; Maile, K.; Gulachek, N.S.; He, J.; He, B. Effects of soft drinks on resting state EEG and brain-computer interface performance. IEEE Access 2017, 5. [Google Scholar] [CrossRef] [PubMed]
- Vidaurre, C.; Blankertz, B. Towards a cure for BCI illiteracy. Brain Topogr. 2010, 23, 194–198. [Google Scholar] [CrossRef] [PubMed]
- Mariushi, M. Brains activation during manipulation of the myoelectric prosthetic hand: A functional magnetic reonance imaging study. Neurolmage 2004, 21, 1604–1611. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Class | Example/Application | Display & Function | No of Subjects | Mean Accuracy | ITR 1 |
|---|---|---|---|---|---|---|
| Evoked | VEP | SSVEP/Speller [10] | Look at one of 30 flickering target stimuli associated with desired character | 32 | 90.81% | 35.78 bpm |
| ERP | P300/Speller [15] | Focus on the desired letter until it next flashes | 15 | 69.28% | 20.91 bpm | |
| Auditory/Speller [16] | Spatial auditory cues were used to aid the use of an on-screen speller | 21 | 86.1% | 5.26 bpm/0.94 char/min | ||
| Spontaneous | N/A | Blinks/Virtual keyboard [17] | Choose from 29 characters using eye blinks to navigate/select | 14 | N/A | 1 char/min |
| Motor imagery (MI)/Exoskeleton control [18] | Control an exoskeleton of the upper limbs using right and left hand MI | 4 | 84.29% | N/A |
| Paper | Feature Extraction Method 1 | Feature Selection Method 2 | Classification Method 3 | Classification Accuracy 7 |
|---|---|---|---|---|
| Rodríguez-Bermúdez & García-Laencina, 2012 [26] | AAR modelling, PSD | LARS/LOO-Press Criterion | LDA with regularization | 62.2% (AAR), 69.4% (PSD) |
| Kevric & Subasi, 2017 [11] | Empirical mode decomposition, DWT, WPD 4 | Kaiser criterion | k-NN | 92.8% (WPD) 6 |
| Zhou et al., 2018 [28] | Envelope analysis with DWT & Hilbert transform | None | RNN LSTM classifier | 91.43% |
| Kumar et al., 2017 [47] | CSP & CSSP 5 | None, FBCSP, DFBCSP, SFBCSP, SBLFB, DFBCSP-MI 4 | SVM | Classification accuracy was not quoted. |
| Yu et al., 2014 [65] | CSP | PCA | SVM | 76.34% |
| Baig et al., 2017 [3] | CSP | PSO, simulated annealing, ABC optimization, ACO, DE 4 | LDA, SVM, k-NN, naive Bayes, regression trees 4 | 90.4% (PSO), 87.44% (simulated annealing), 94.48% (ABC optimization), 84.54% (ACO), 95% DE 8 |
| Method | Type | Mean Classification Accuracy 1 | Comments |
|---|---|---|---|
| Principal component analysis (PCA) [65] | Statistical | 76.34% | Assumes components with the highest variance have the most information. |
| Filter Bank Selection [47] | Various | N/A 2 | Used only for frequency band selection with CSP [47] |
| Particle-Swarm Optimization (PSO) [3] | Metaheuristic | 90.4% | Strong Directional search and population-based search with exploration and exploitation [91]. |
| Simulated Annealing [3] | Probabilistic | 87.44% | Aims to find the global maximum through a random search. [3] |
| Artificial Bee-Colony (ABC) Optimization [3] | Metaheuristic | 94.48% | Searches regions of the solution space in turn in order to find the fittest individual in each region. [91] |
| Ant Colony Optimization (ACO) [3] | Metaheuristic | 84.54% | Uses common concepts of directional and population-based search but introduces search space marking. [91] |
| Differential Evolution (DE) [3] | Metaheuristic | 95% | Similar to GAs, with a strong capability of convergence. [3] |
| Firefly Algorithm [74] | Metaheuristic | 70.2% | Can get stuck in local minima, [74] introduced a learning algorithm to prevent this. |
| Genetic Algorithm (GA) [74] | Metaheuristic | 59.85% | Slower than a PSO approach [49], [49] found that PSO was more accurate. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padfield, N.; Zabalza, J.; Zhao, H.; Masero, V.; Ren, J. EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges. Sensors 2019, 19, 1423. https://doi.org/10.3390/s19061423
Padfield N, Zabalza J, Zhao H, Masero V, Ren J. EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges. Sensors. 2019; 19(6):1423. https://doi.org/10.3390/s19061423
Chicago/Turabian StylePadfield, Natasha, Jaime Zabalza, Huimin Zhao, Valentin Masero, and Jinchang Ren. 2019. "EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges" Sensors 19, no. 6: 1423. https://doi.org/10.3390/s19061423
APA StylePadfield, N., Zabalza, J., Zhao, H., Masero, V., & Ren, J. (2019). EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges. Sensors, 19(6), 1423. https://doi.org/10.3390/s19061423