Accurate Multiple Ocean Bottom Seismometer Positioning in Shallow Water Using GNSS/Acoustic Technique



Abstract
:1. Introduction
2. Ocean Bottom Cable Measurement System and GNSS/Acoustic Technique
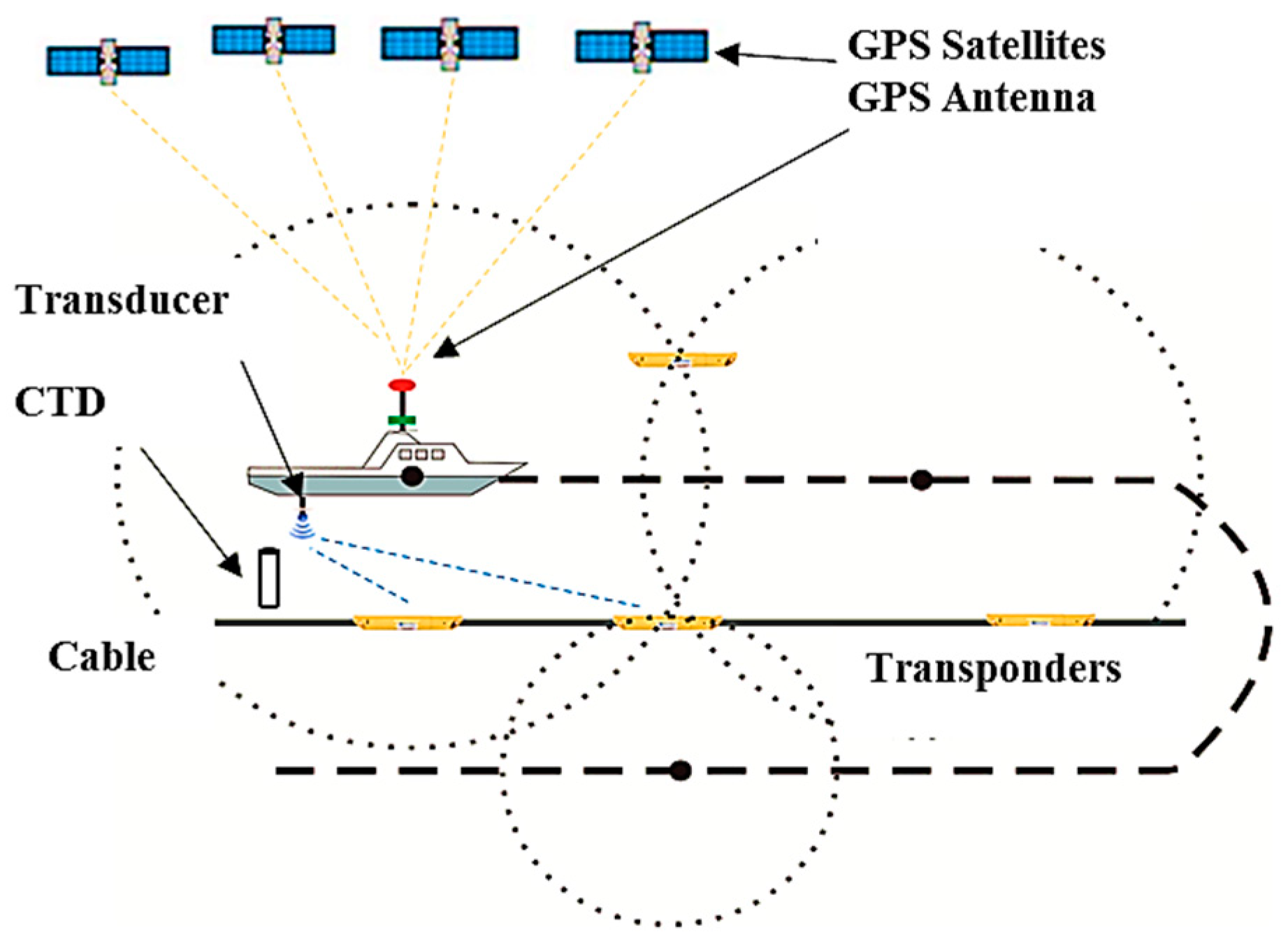
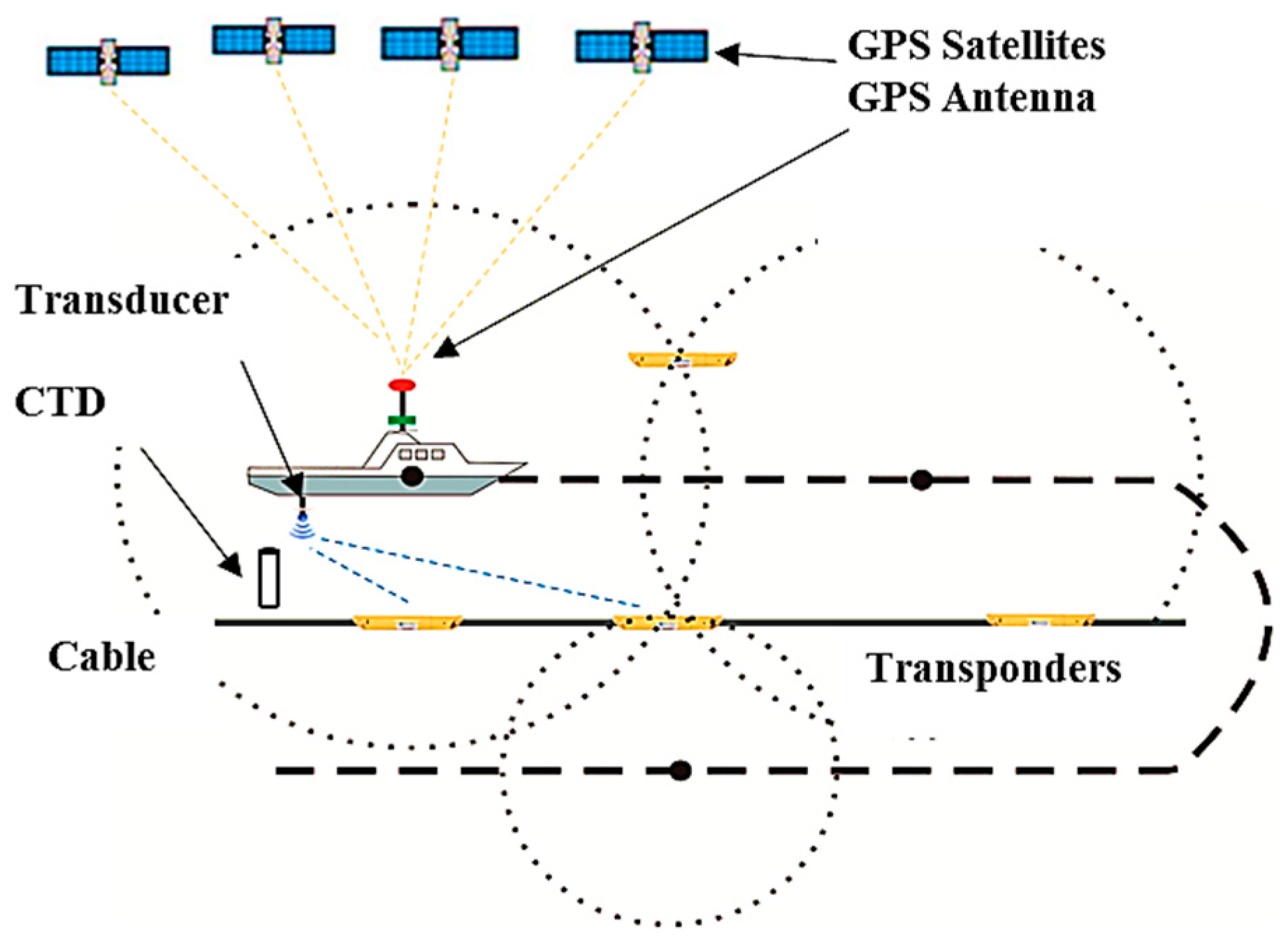
2.1. Ocean Bottom Cable Measurement System
2.2. The Positioning of the Survey Vessel
2.3. Calculation of Transponder Positions
3. New Approach to Positioning Multiple Transponders
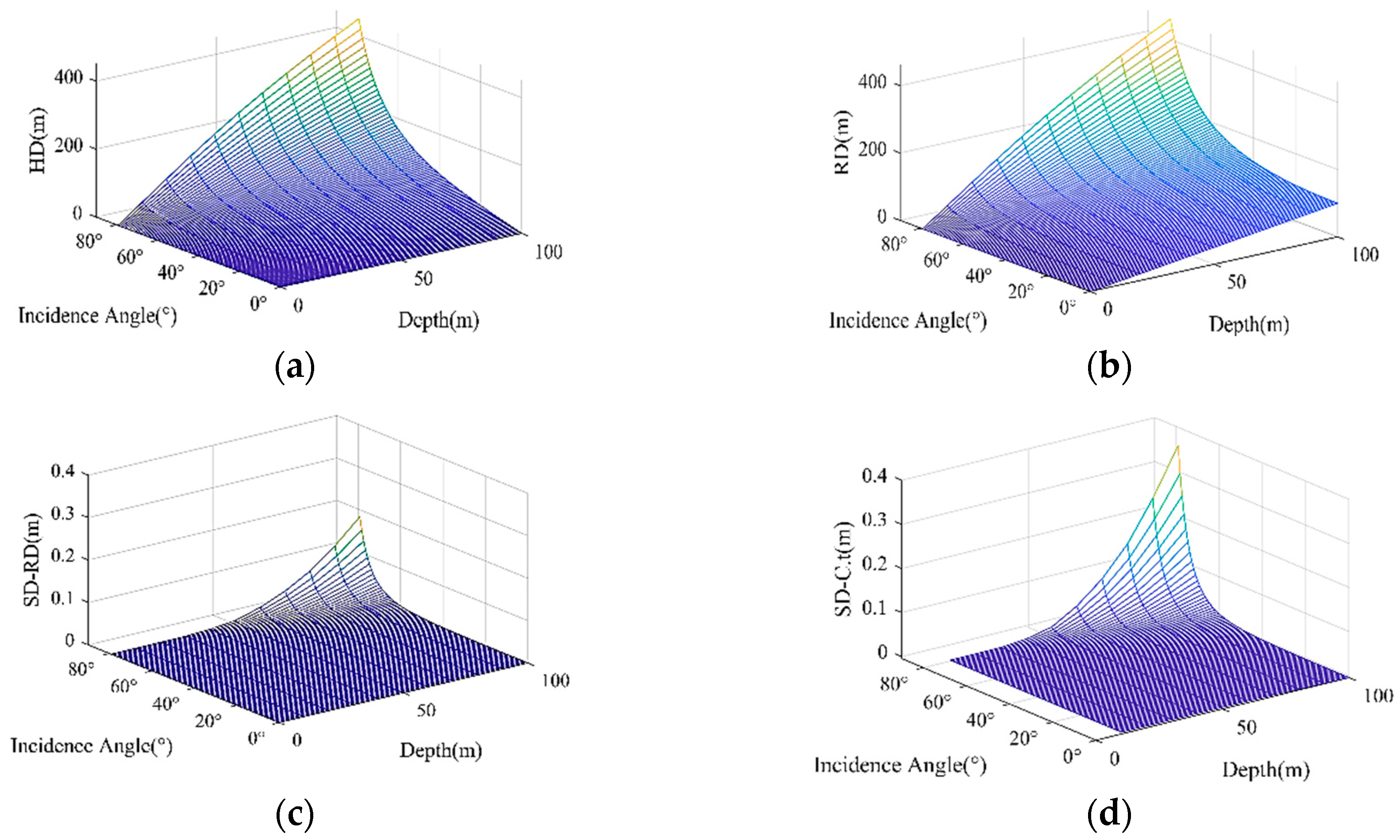
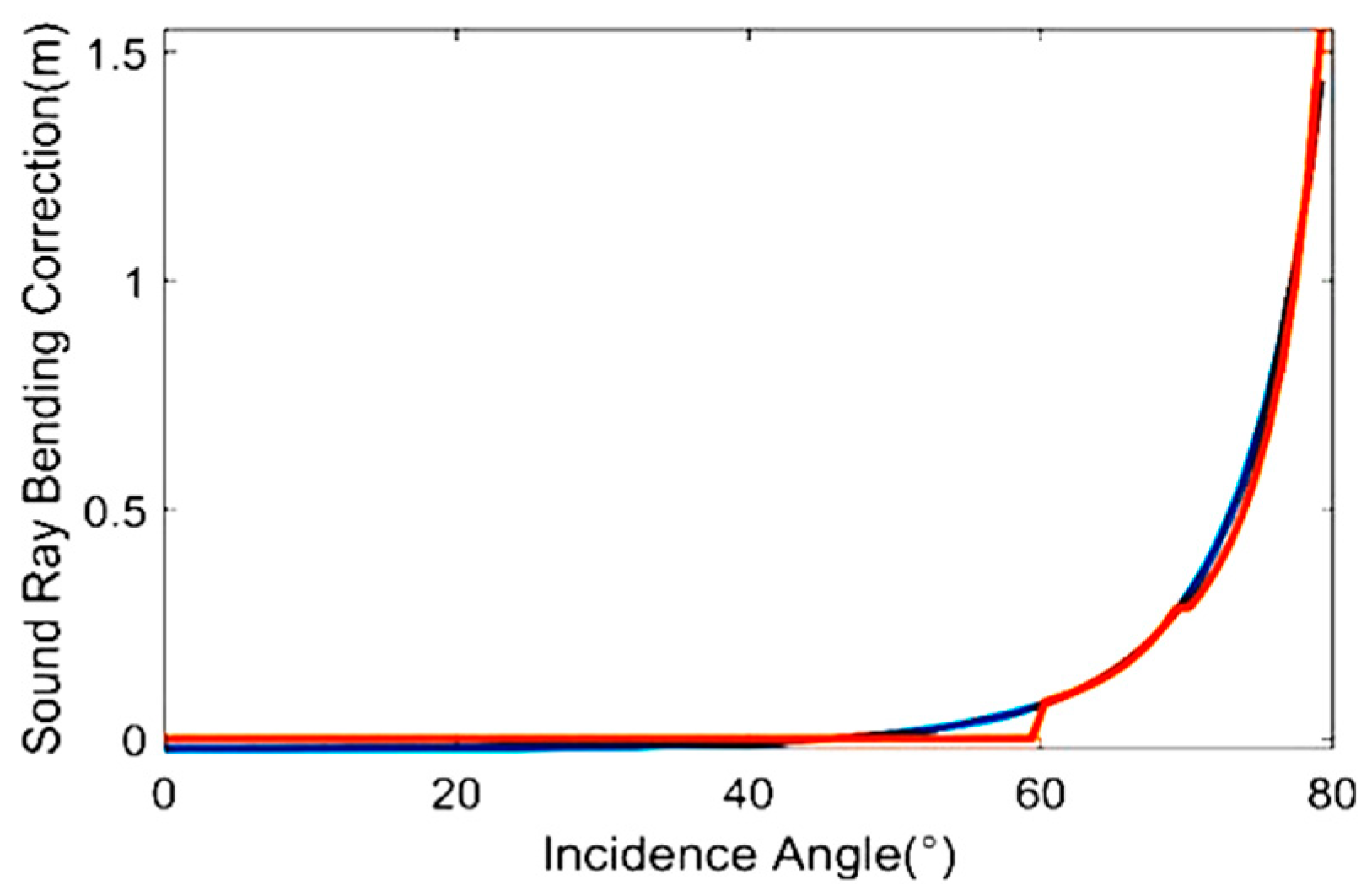
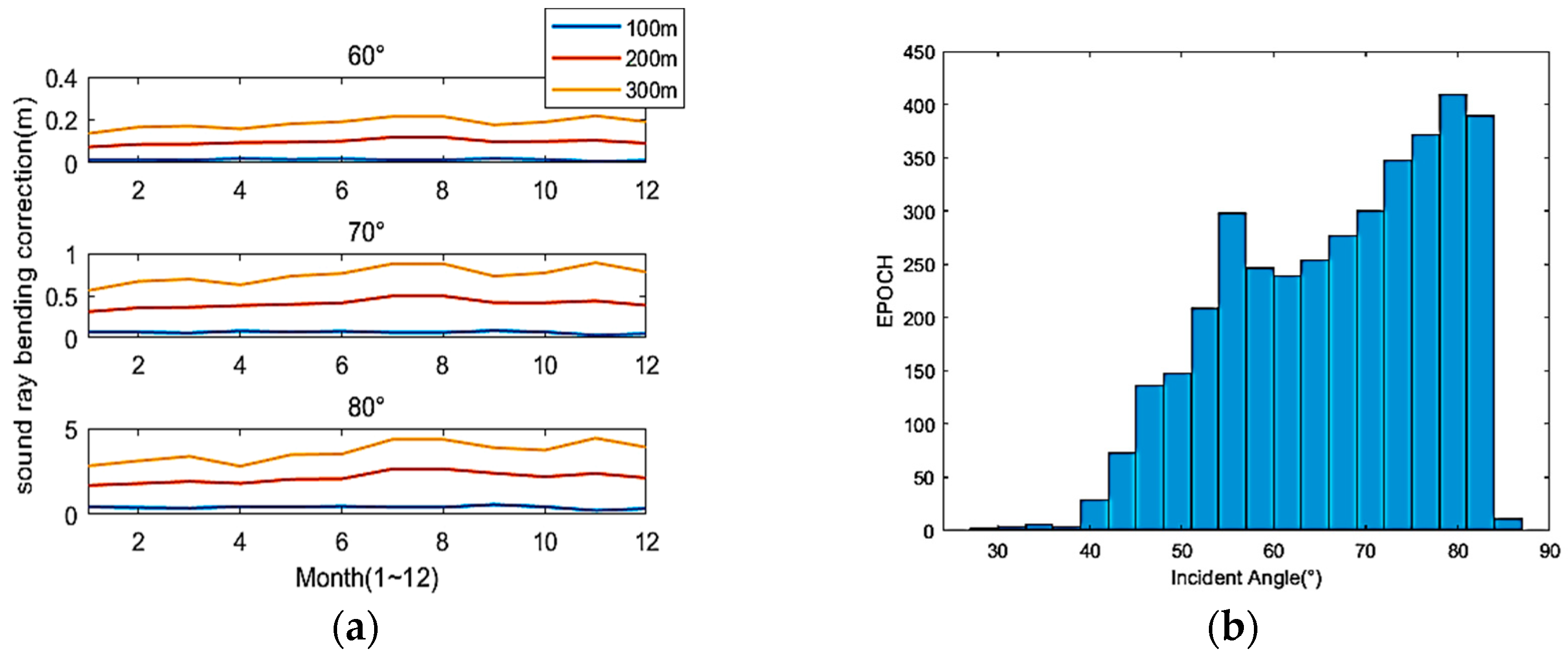
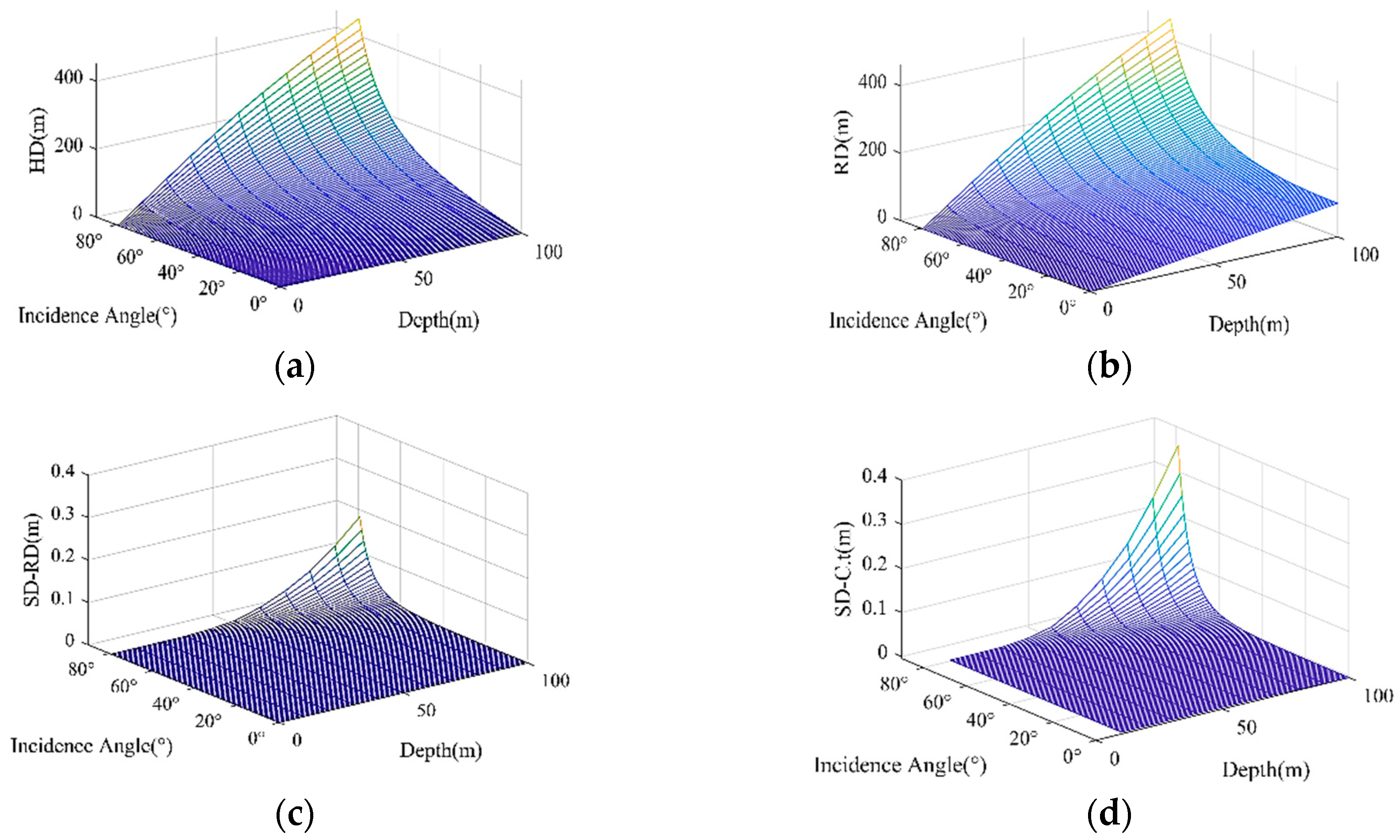
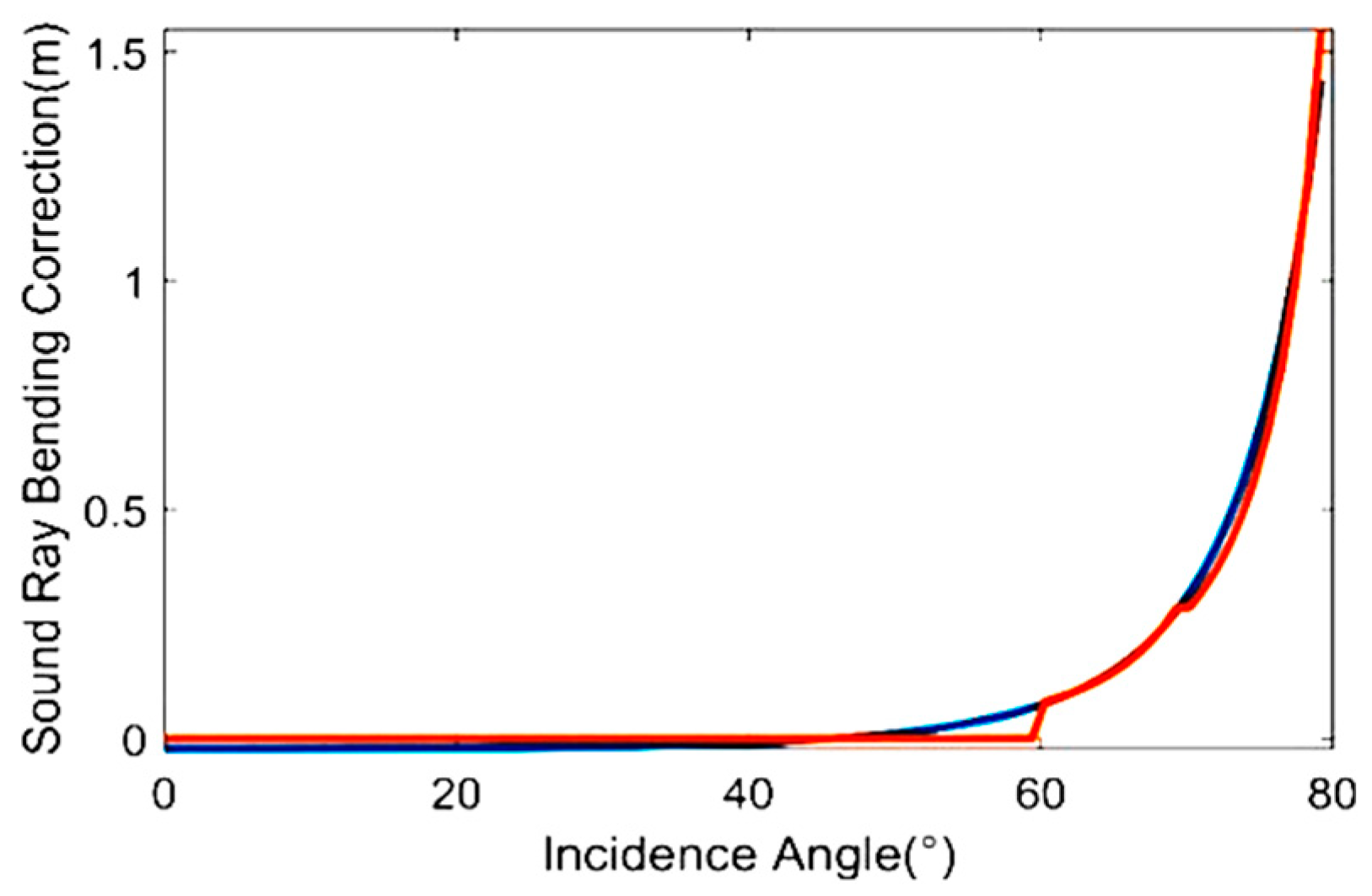
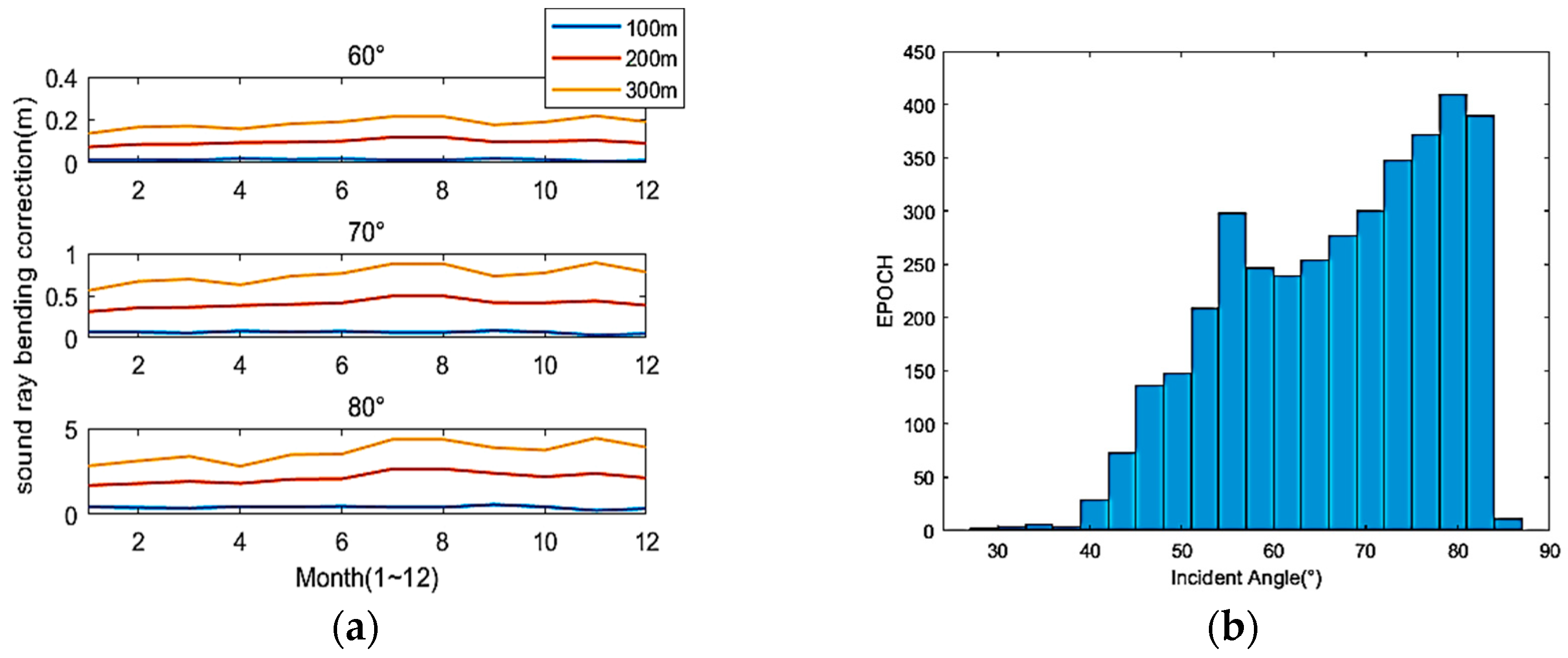
3.1. The Effect of SRB in Shallow Water
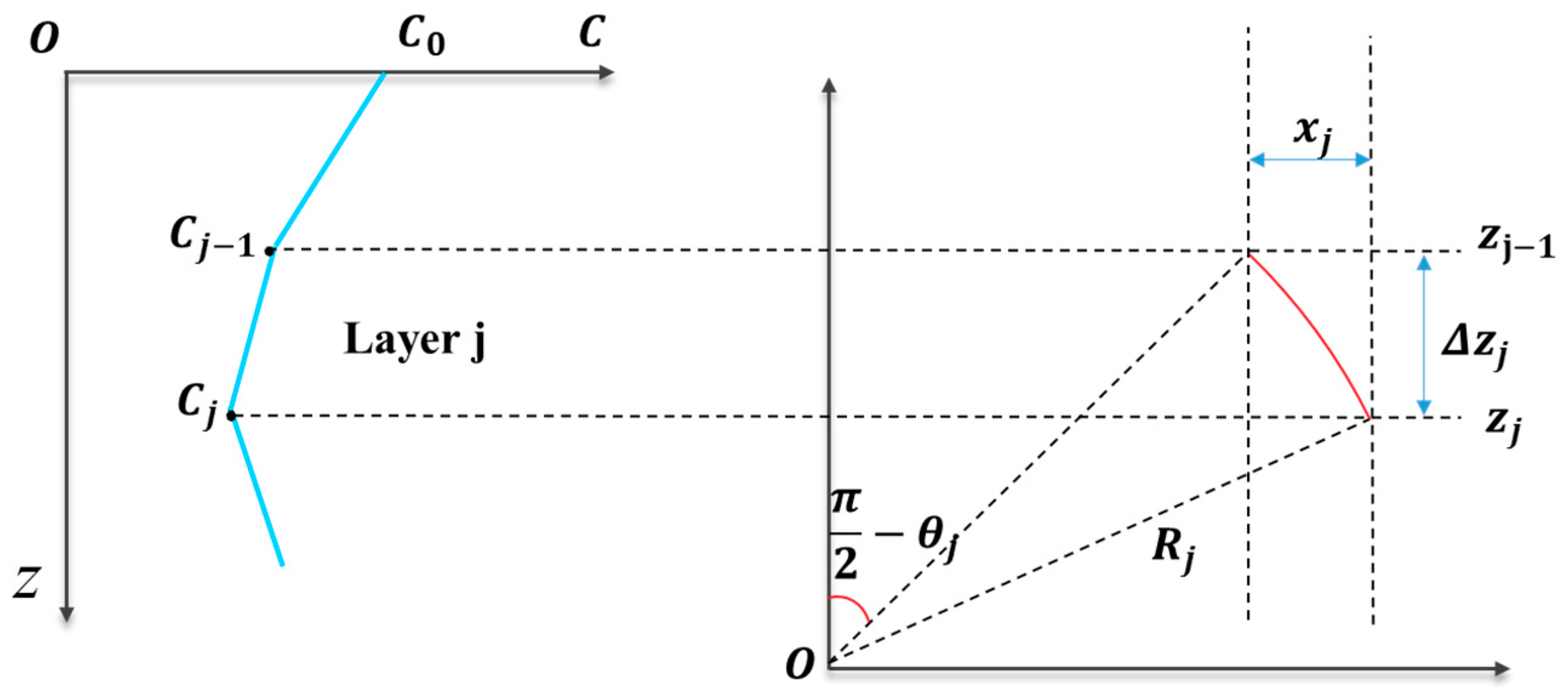
3.2. A Segmented Incidence Angle (SIA) Model
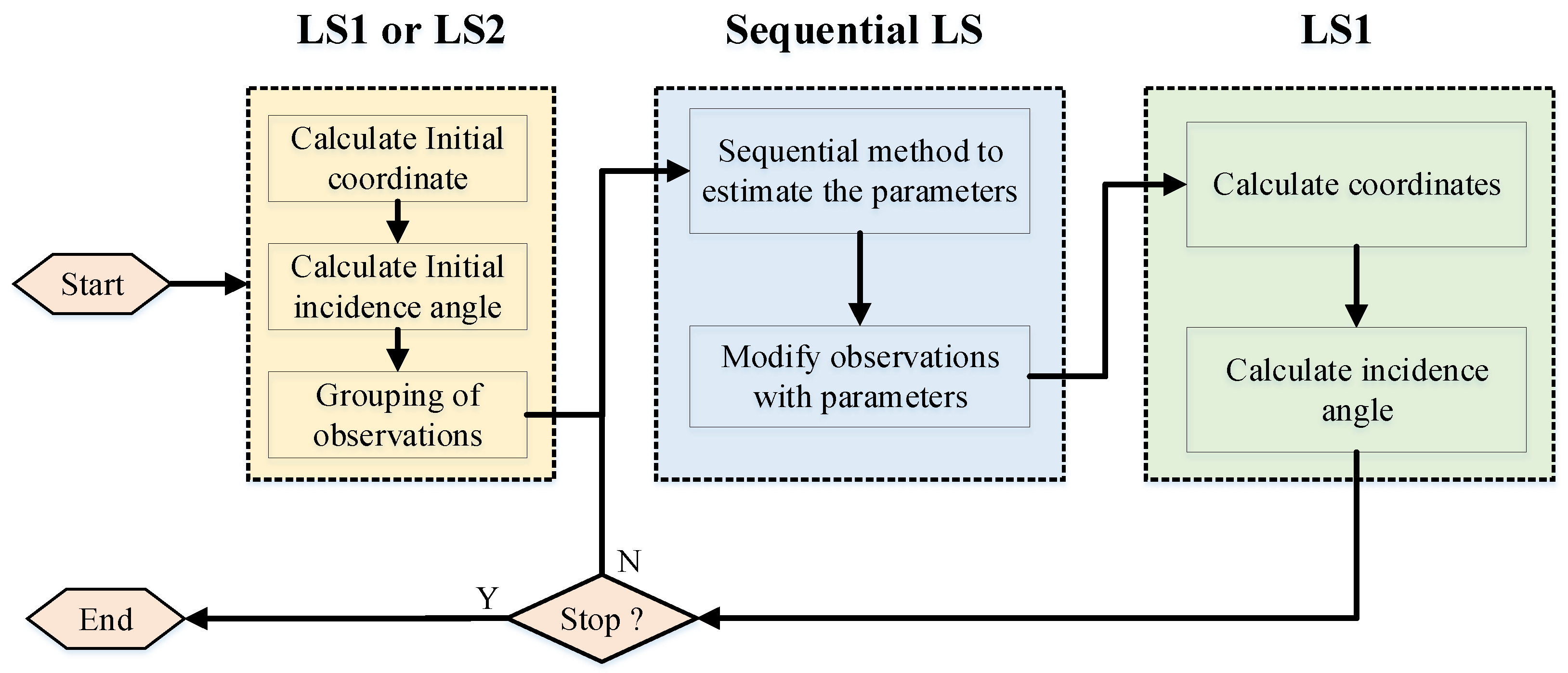
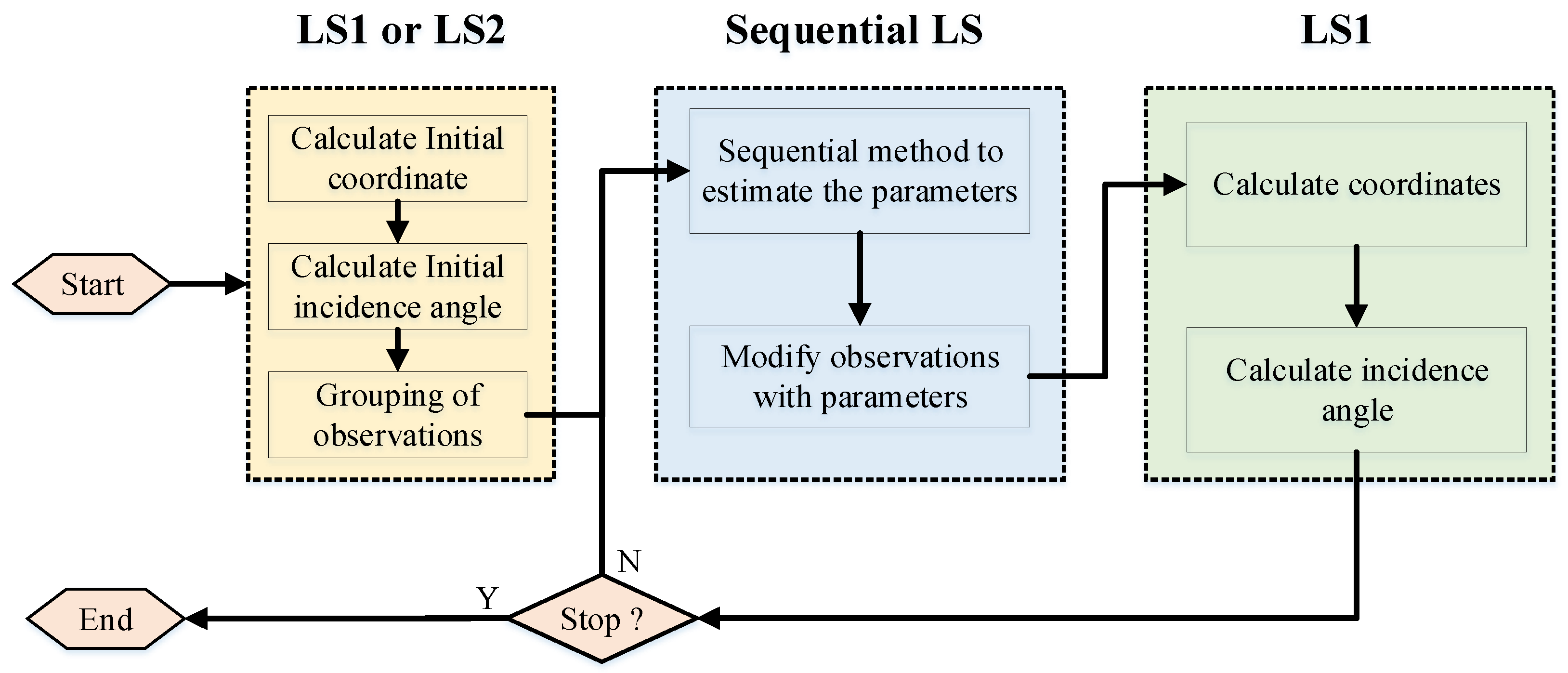
3.3. Calculation Method of Multiple Transponders with Sequential Least Square
4. Simulation and Experiment in the South China Sea
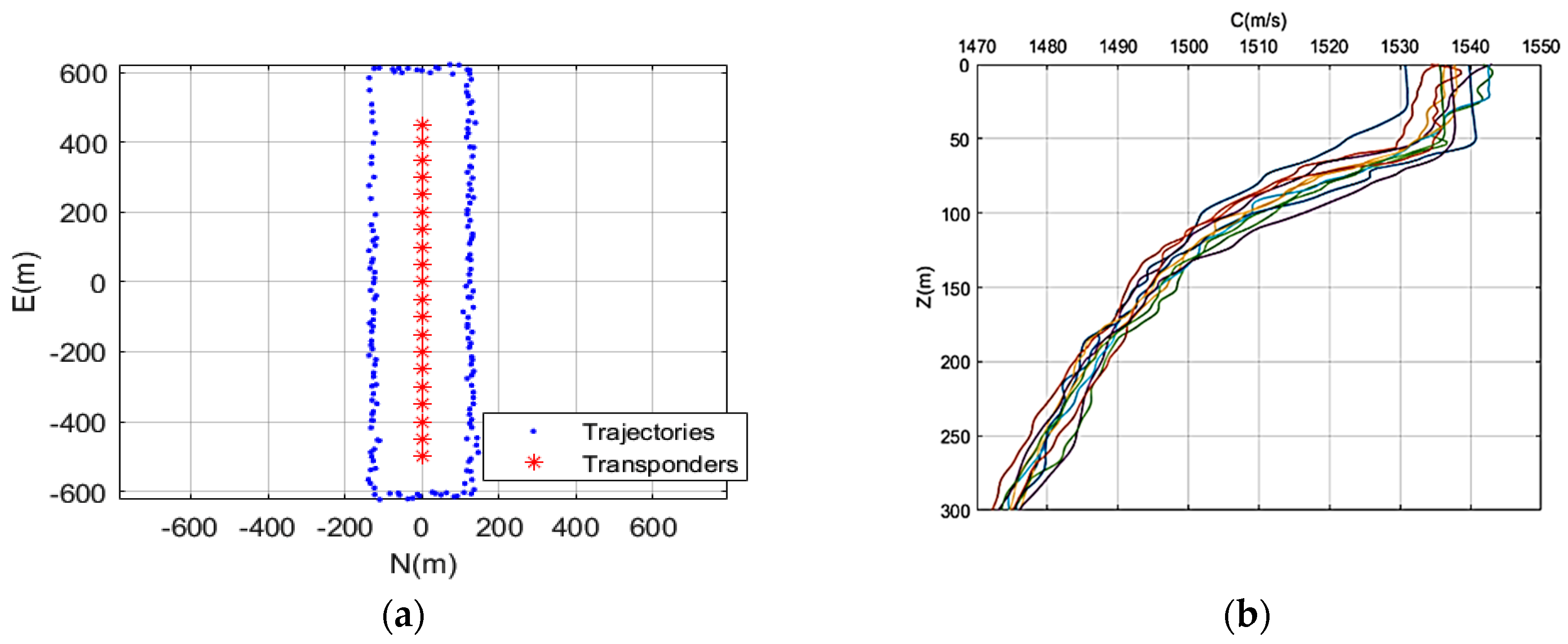
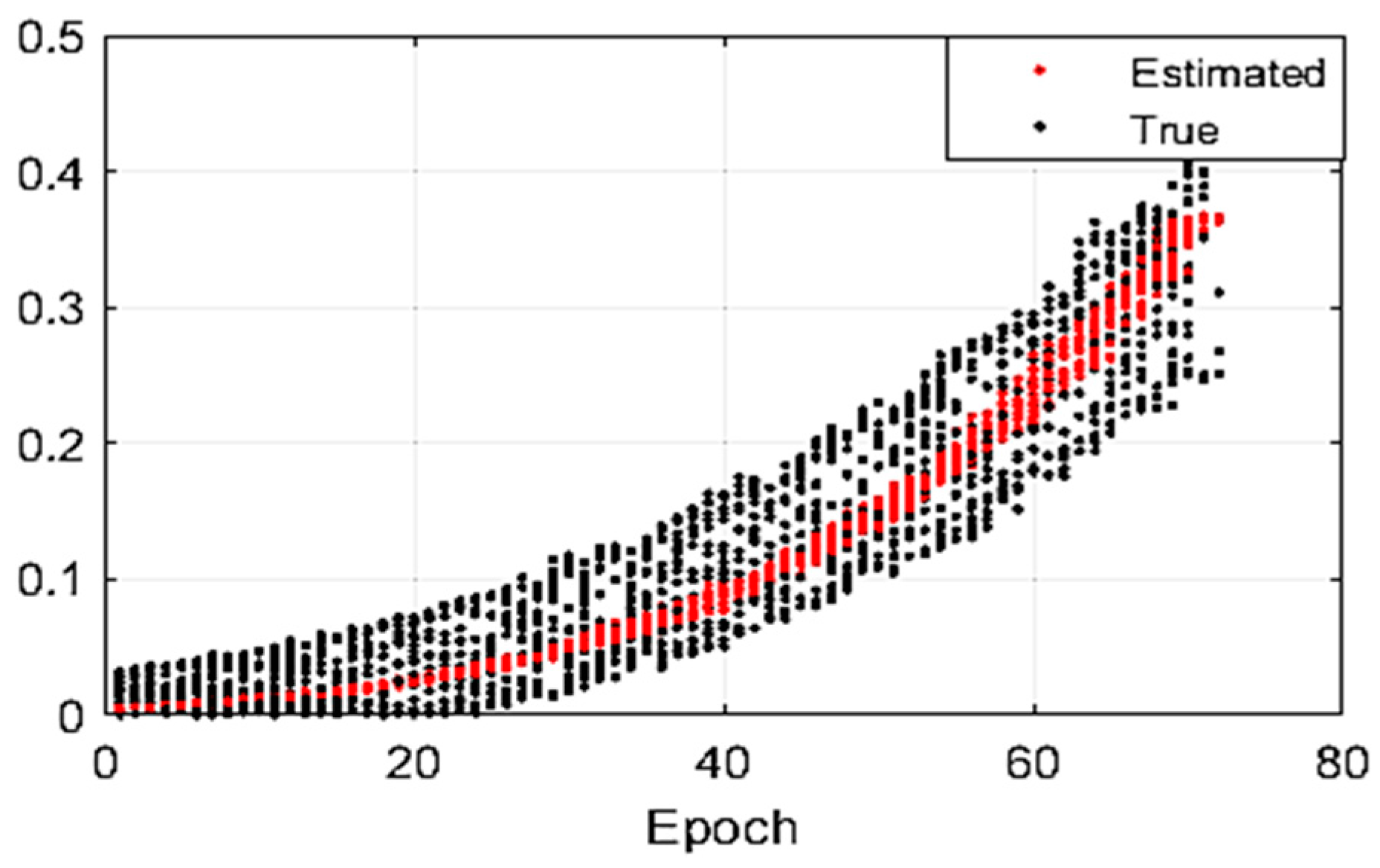
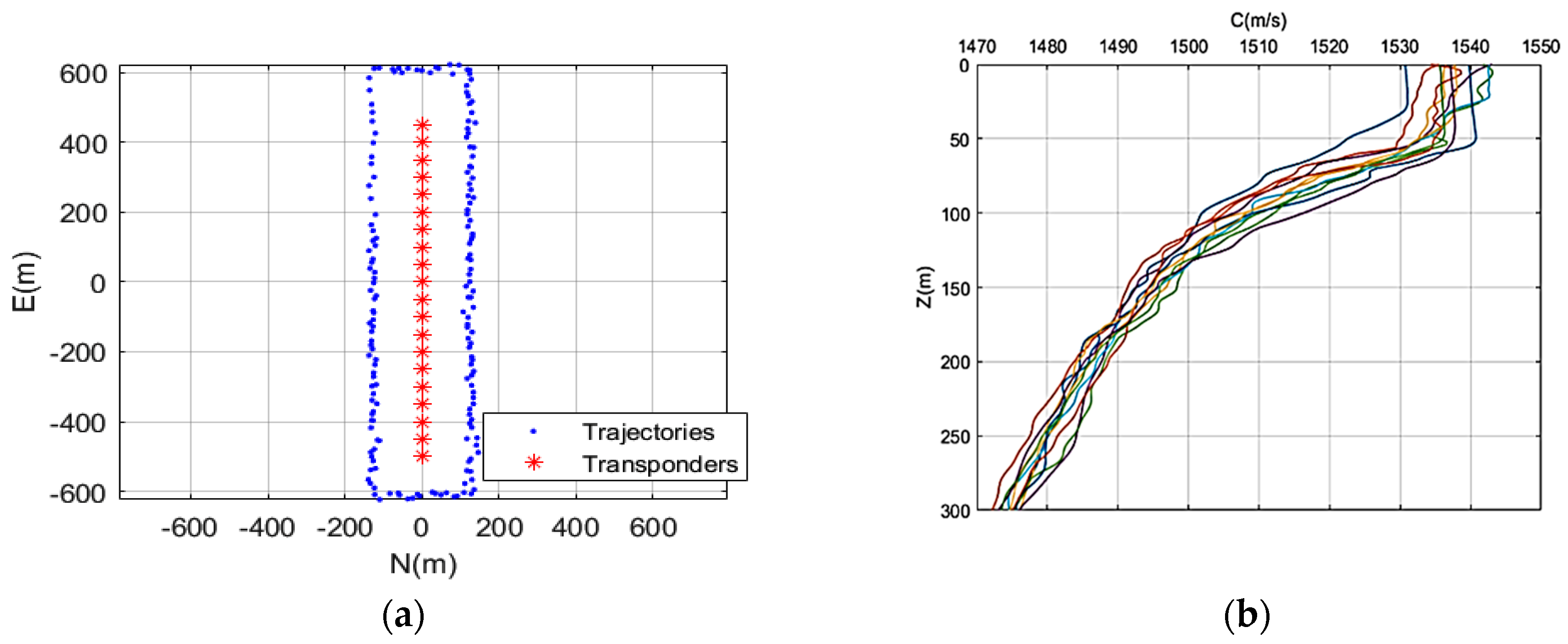
4.1. Case 1: Simulation
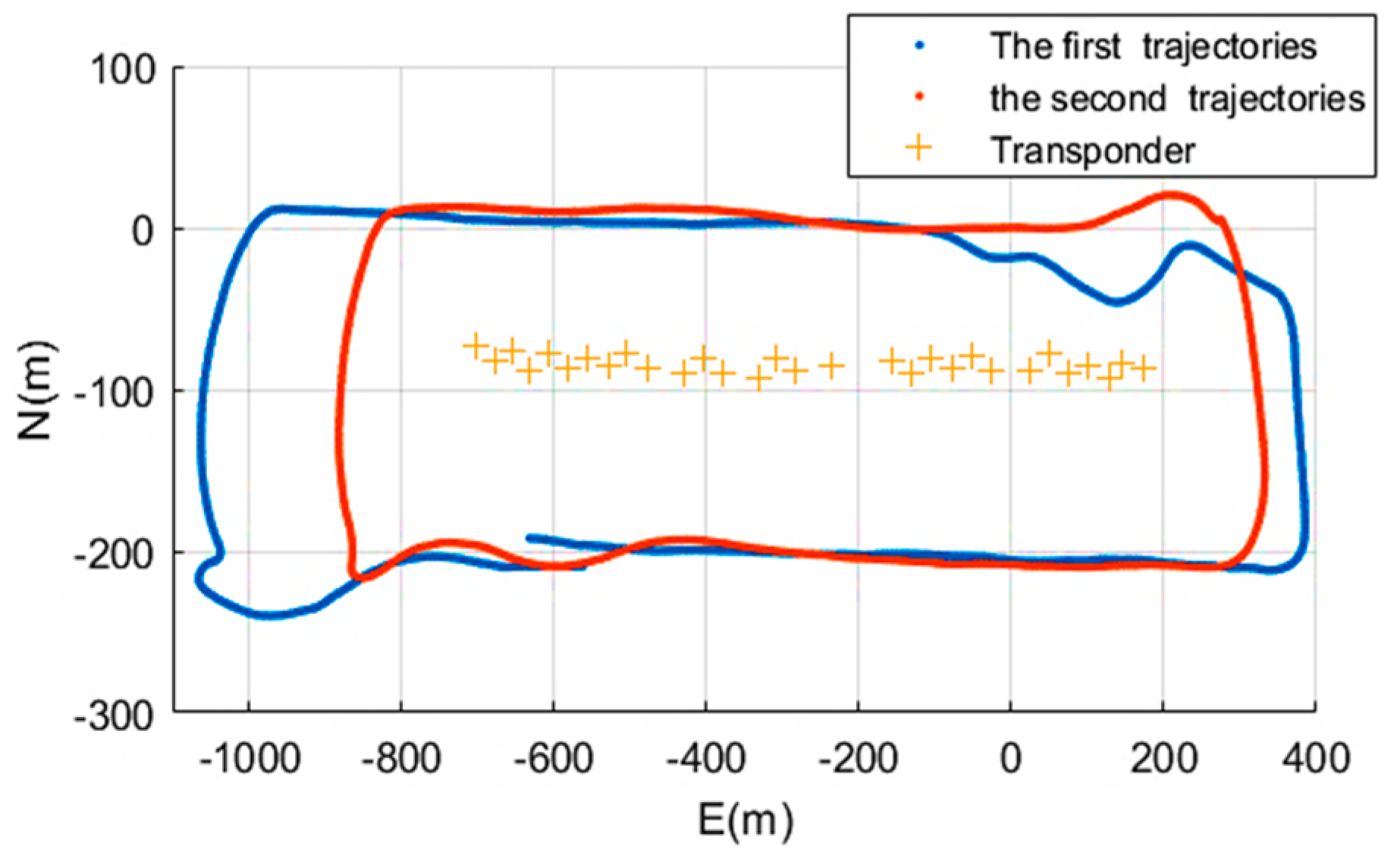
4.2. Case 2: Experiment in the South China Sea
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benazzouz, O.; Pinheiro, L.M.; Matias, L.M.A.; Afilhado, A.; Herold, D.; Haines, S.S. Accurate ocean bottom seismometer positioning method inspired by multilateration technique. Math. Geosci. 2018, 50, 569–584. [Google Scholar] [CrossRef]
- Liqiang, H.; Wen, C. Application of first break second positioning technique in OBC. Geophys. Prospect. Petroleum 2003, 42, 501–504. [Google Scholar]
- Ni, C.Z.; Quan, H.Y. A new method for high-precision first break secondary positioning—search method. Oil Geophys. Prospect. 2008, 43, 131–136. [Google Scholar]
- Tan, H.P.; Diamant, R.; Seah, W.K.G.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Petersen, F.; Urlaub, M.; Lange, D.; Kopp, H.; Hannemann, K.; Krabbenhoeft, A.; Gross, F.; Krastel, S.; Gutscher, M.-A. Monitoring deformation offshore Mount Etna: First results from seafloor geodetic measurements. In Proceedings of the 19th EGU General Assembly, Vienna, Austria, 23–28 April 2017; p. 7476. [Google Scholar]
- Shiobara, H.; Nakanishi, A.; Shimamura, H.; Mjelde, R.; Kanazawa, T.; Berg, E.W. Precise Positioning of Ocean Bottom Seismometer by Using Acoustic Transponder and CTD. Mar. Geophys. Res. 1997, 19, 199–209. [Google Scholar] [CrossRef]
- Fang, S. Research on Key Technique of Navigation & Positioning in Ocean Bottom Cable Seismic Operation and System development. Ph.D. Thesis, Wuhan University, Wuhan, China, 2014. [Google Scholar]
- Shou, F.; Jian, Z.; Chang, Y.; Xue, Q.; De, W.; Hua, H. The Design and Research of OBC Seismic Integrated Navigation System. Sci. Technol. Eng. 2014, 28, 163–167. [Google Scholar]
- Gebre-Egziabher, D.; Gleason, S. GNSS Applications and Methods; Artech House: Boston, MA, USA, 2009. [Google Scholar]
- Imano, M.; Kido, M.; Ohta, Y.; Fukuda, T.; Ochi, H.; Takahashi, N.; Hino, R. Improvement in the Accuracy of Real-Time GNSS/Aoustic Measurements Using a Multi-Purpose Moored Buoy System by Removal of Acoustic Multipath. In International Symposium on Geodesy for Earthquake and Natural Hazards (GENAH); Springer: Berlin/Heidelberg, Germany, 2015; pp. 105–114. [Google Scholar]
- Etter, P.C. Underwater Acoustic Modeling and Simulation, 4th ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Xu, P.; Ando, M.; Tadokoro, K. Precise, three-dimensional seafloor geodetic deformation measurements using difference techniques. Earth Planets Space 2005, 57, 795–808. [Google Scholar] [CrossRef]
- Kido, M.; Osada, Y.; Fujimoto, H. Temporal variation of sound speed in ocean: a comparison between GNSS/acoustic and in situ measurements. Earth Planets Space 2008, 60, 229–234. [Google Scholar] [CrossRef]
- Yamada, T.; Ando, M.; Tadokoro, K.; Sato, K.; Okuda, T.; Oike, K. Error evaluation in acoustic positioning of a single transponder for seafloor crustal deformation measurements. Earth Planets Space 2002, 54, 871–881. [Google Scholar] [CrossRef]
- Fujita, M.; Ishikawa, T.; Mochizuki, M.; Sato, M.; Toyama, S.-I.; Katayama, M.; Kawai, K.; Matsumoto, Y.; Yabuki, T.; Asada, A.; et al. GNSS/Acoustic seafloor geodetic observation: method of data analysis and its application. Earth Planets Space 2006, 58, 265–275. [Google Scholar] [CrossRef]
- Kido, M. Detecting horizontal gradient of sound speed in ocean. Earth Planets Space 2007, 59, e33–e36. [Google Scholar] [CrossRef]
- Yang, F.; Lu, X.; Li, J.; Han, L.; Zheng, Z. Precise Positioning of Underwater Static Objects without Sound Speed Profile. Mar. Geod. 2011, 34, 138–151. [Google Scholar] [CrossRef]
- Gaillard, F.; Terre, T.; Guillot, A. Monitoring moored instrument motion by optimal estimation. Ocean. Eng. 2006, 33, 1–22. [Google Scholar]
- Chen, H.H.; Wang, C.C. Optimal localization of a seafloor transponder in shallow water using acoustic ranging and GNSS observations. Ocean Eng. 2007, 34, 2385–2399. [Google Scholar] [CrossRef]
- Zhao, J.; Zou, Y.; Zhang, H.; Wu, Y.; Fang, S. A new method for absolute datum transfer in seafloor control network measurement. J. Mar. Sci. Technol. 2016, 21, 216–226. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, Z.; He, K.; Ding, N. Investigation on underwater positioning stochastic model based on acoustic ray incidence angle. Appl. Ocean Res. 2018, 77, 69–77. [Google Scholar] [CrossRef]
- Geng, X. Precise Multibeam Acoustic Bathymetry. Mar. Geod. 1999, 22, 157–167. [Google Scholar]
- Ballu, V.; Bouin, M.N.; Calmant, S.; Folcher, E.; Bore, J.-M.; Ammann, J.; Pot, O.; Diament, M.; Pelletier, B. Absolute seafloor vertical positioning using combined pressure gauge and kinematic GNSS data. J. Geod. 2010, 84. [Google Scholar] [CrossRef]
- Chen, H.H. Travel-time approximation of acoustic ranging in GNSS/Acoustic seafloor geodesy. Ocean Eng. 2014, 84, 133–144. [Google Scholar] [CrossRef]
- Peng, D.; Xiong, Y.; Wang, X. Application of Veripos satellite difference GNSS technique in marine exploration. Equip. Geophys. Prospect. 2017, 27, 238–240, 243. [Google Scholar]
- Cartwright, D.S. Multibeam Bathymetric Surveys in the Fraser River Delta, Managing Severe Acoustic Refraction Issues; Department of Geodesy and Geomatics Engineering, University of New Brunswick: Saint John, NB, Canada, 2003. [Google Scholar]
- Kammerer, E. New Method for the Removal of Refraction Artifacts in Multibeam Echosounder Systems. Ph.D. Thesis, University of New Brunswick, Saint John, NB, Canada, 2000. [Google Scholar]
- Liang, M. Post Processing Technology of Underwater Acoustic Accurate Position. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2008. [Google Scholar]
- Wang, Z.; Li, S.; Nie, Z.; Wang, Y.; Wu, S. A large incidence angle ray-tracing method for underwater acoustic positioning. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 1404–1408. [Google Scholar]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: a method for fast GNSS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Liu, H. Research on Key Algorithms for Fast Positioning of Multimode GNSS in Ultra-Short Baseline Network. Bachelor’s Thesis, China University of Petroleum (East China), Qingdao, China, 2017. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | LS1 | LS2 | LS3 | SLS | |
|---|---|---|---|---|---|
| 100 m | Epoch | 1865 | 791 | 791 | 1865 |
| Horizontal | 0.06 | 0.09 | 0.09 | 0.06 | |
| Vertical | 0.10 | 0.04 | 0.09 | 0.03 | |
| 200 m | Epoch | 3024 | 1676 | 1676 | 3024 |
| Horizontal | 0.10 | 0.06 | 0.06 | 0.05 | |
| Vertical | 0.48 | 0.04 | 0.12 | 0.03 | |
| 300 m | Epoch | 3200 | 2402 | 2402 | 3200 |
| Horizontal | 0.57 | 0.05 | 0.05 | 0.050 | |
| Vertical | 0.51 | 0.05 | 0.26 | 0.028 | |
| Method | LS1 | LS2 | LS3 | SLS | |
|---|---|---|---|---|---|
| 100 m | Epoch | 925 | 381 | 381 | 925 |
| Horizontal | 0.13 | 0.16 | 0.16 | 0.09 | |
| Vertical | 0.13 | 0.09 | 0.16 | 0.08 | |
| 200 m | Epoch | 1297 | 612 | 612 | 1297 |
| Horizontal | 0.15 | 0.15 | 0.10 | 0.06 | |
| Vertical | 0.50 | 0.12 | 0.12 | 0.04 | |
| 300 m | Epoch | 1536 | 777 | 777 | 1536 |
| Horizontal | 0.15 | 0.09 | 0.09 | 0.08 | |
| Vertical | 0.89 | 0.16 | 0.23 | 0.03 | |
| Method | LS1 | LS2 | LS3 | SLS | |
|---|---|---|---|---|---|
| 100 m | Good | 0.41 | 0.43 | 0.64 | 0.43 |
| Bad | 0.69 | 0.82 | 1.14 | 0.75 | |
| 200 m | Good | 0.34 | 0.37 | 0.47 | 0.35 |
| Bad | 0.53 | 0.61 | 0.78 | 0.57 | |
| 300 m | Good | 0.30 | 0.33 | 0.45 | 0.32 |
| Bad | 0.45 | 0.51 | 0.64 | 0.48 | |
| Method | LS1 | LS2 | LS3 | SLS |
|---|---|---|---|---|
| Horizontal | 0.66 | 0.97 | 0.56 | 0.54 |
| Vertical | 0.83 | 1.09 | 0.84 | 0.77 |
| Incidence Angle/° | 60 | 65 | 68 | 70 | 75 | 80 | |
|---|---|---|---|---|---|---|---|
| Method | |||||||
| LS2(m) | 0.77 | 0.66 | 0.60 | 0.52 | 0.53 | 0.52 | |
| LS3(m) | 2.48 | 1.24 | 1.11 | 0.80 | 0.65 | 0.64 | |
| Method | LS1 | LS2 | LS3 | SLS |
|---|---|---|---|---|
| Horizontal | 0.52 | 0.51 | 0.56 | 0.30 |
| Vertical | 0.36 | 0.42 | 0.96 | 0.25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wang, Z.; Zhao, S.; He, K. Accurate Multiple Ocean Bottom Seismometer Positioning in Shallow Water Using GNSS/Acoustic Technique. Sensors 2019, 19, 1406. https://doi.org/10.3390/s19061406
Liu H, Wang Z, Zhao S, He K. Accurate Multiple Ocean Bottom Seismometer Positioning in Shallow Water Using GNSS/Acoustic Technique. Sensors. 2019; 19(6):1406. https://doi.org/10.3390/s19061406
Chicago/Turabian StyleLiu, Huimin, Zhenjie Wang, Shuang Zhao, and Kaifei He. 2019. "Accurate Multiple Ocean Bottom Seismometer Positioning in Shallow Water Using GNSS/Acoustic Technique" Sensors 19, no. 6: 1406. https://doi.org/10.3390/s19061406
APA StyleLiu, H., Wang, Z., Zhao, S., & He, K. (2019). Accurate Multiple Ocean Bottom Seismometer Positioning in Shallow Water Using GNSS/Acoustic Technique. Sensors, 19(6), 1406. https://doi.org/10.3390/s19061406