A Multi-Path Compensation Method for Ranging in Wearable Ultrasonic Sensor Networks for Human Gait Analysis


Abstract
:1. Introduction
2. Proposed Method
Doppler Compensation in the Received Signal
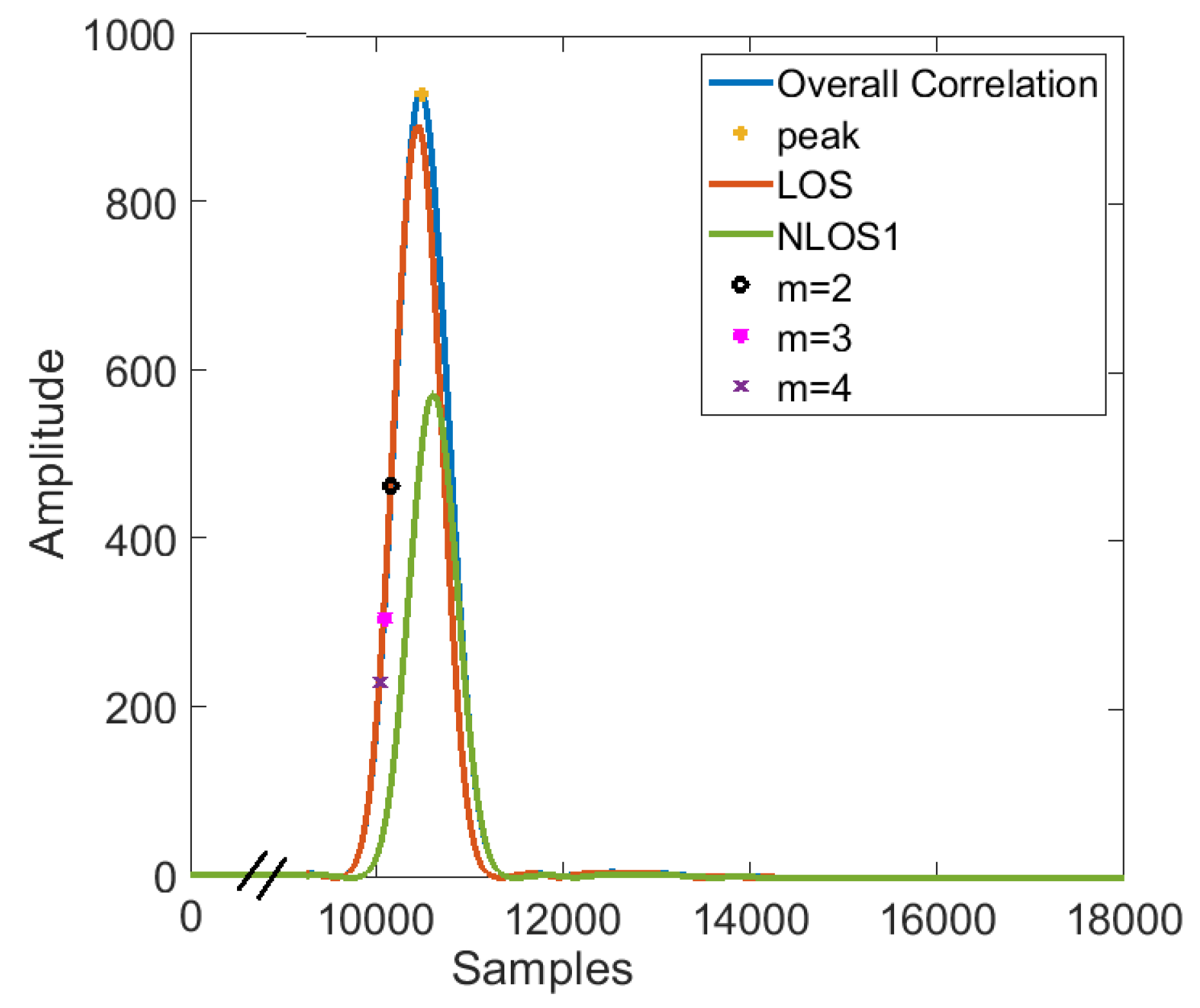
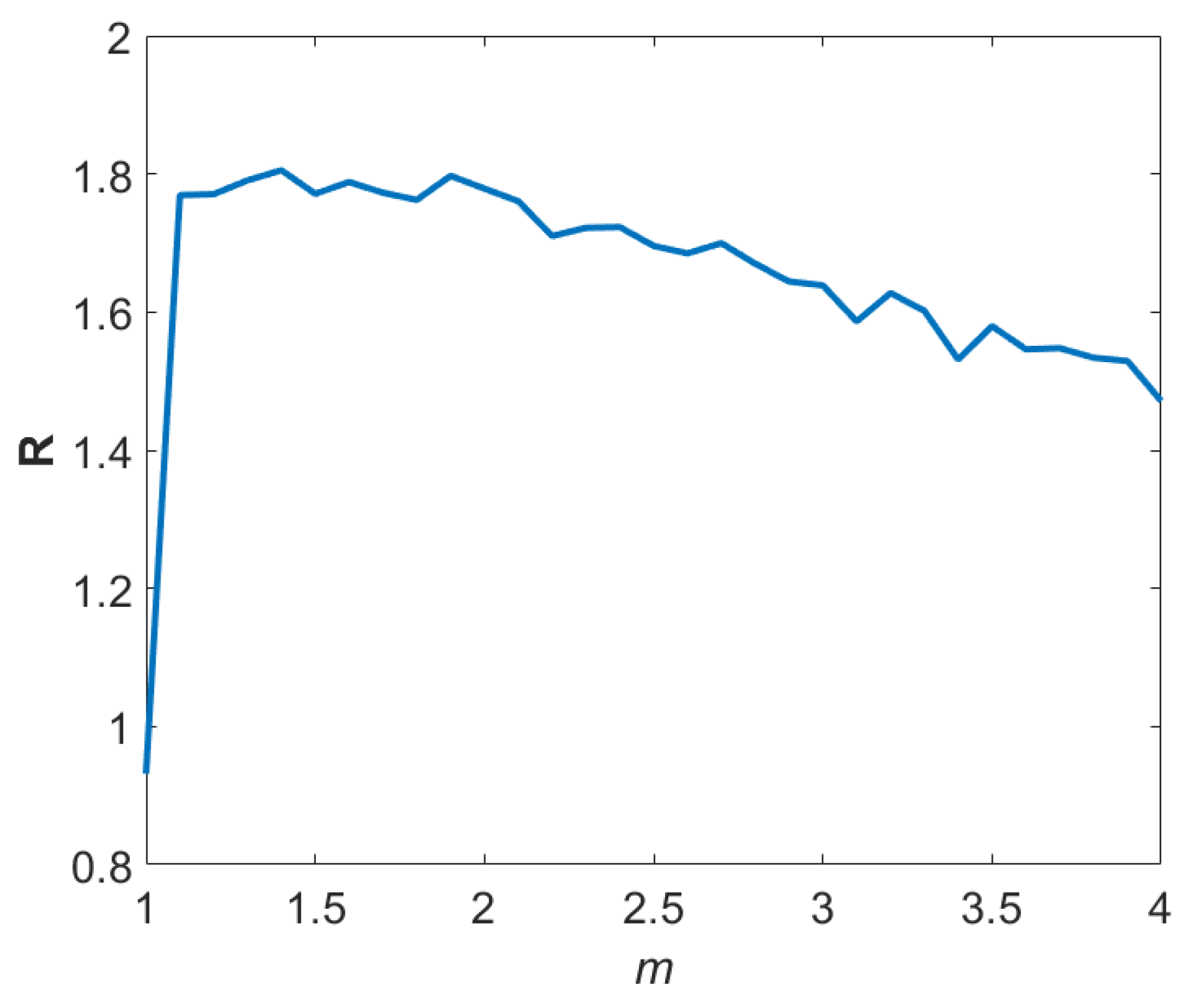
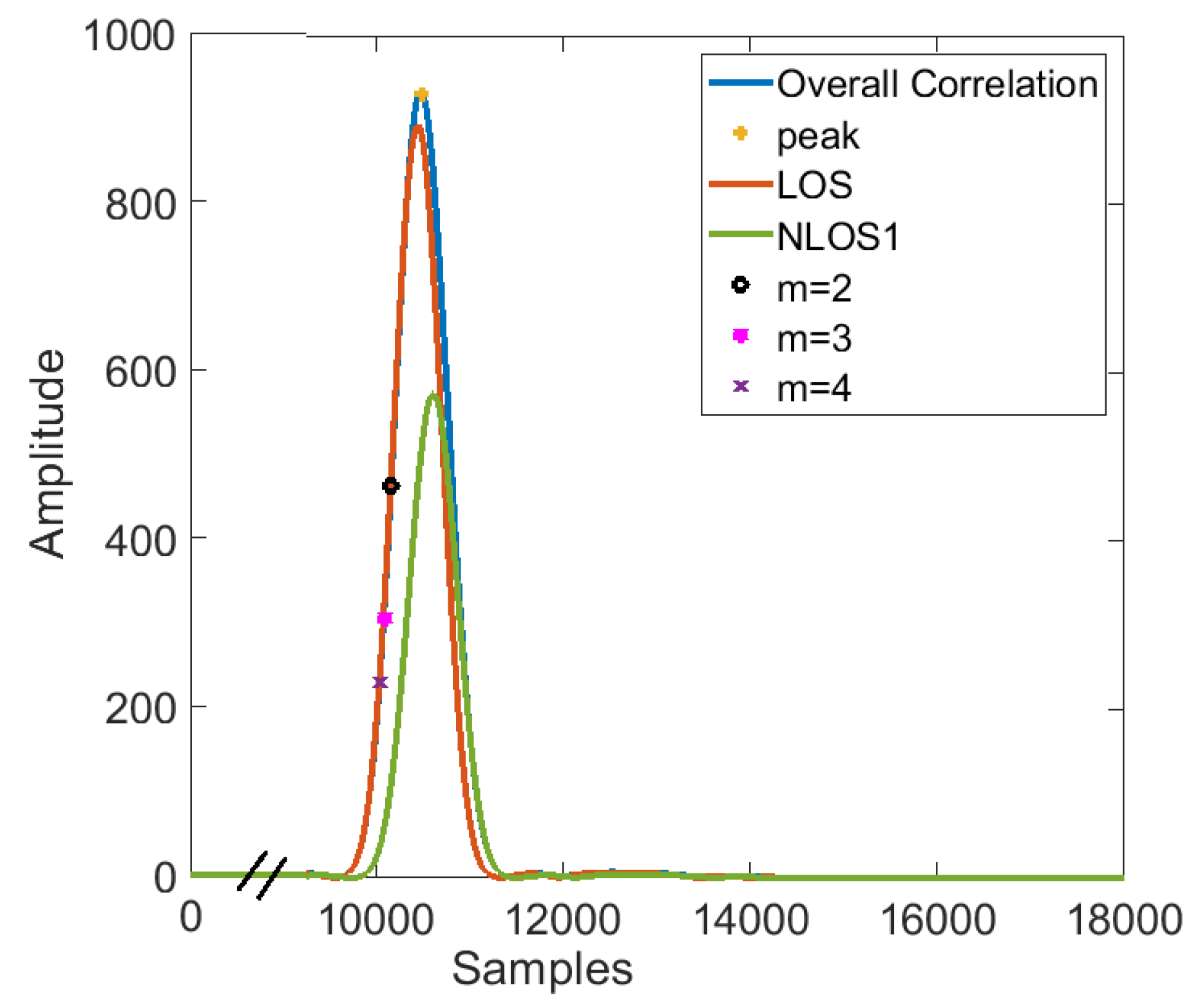
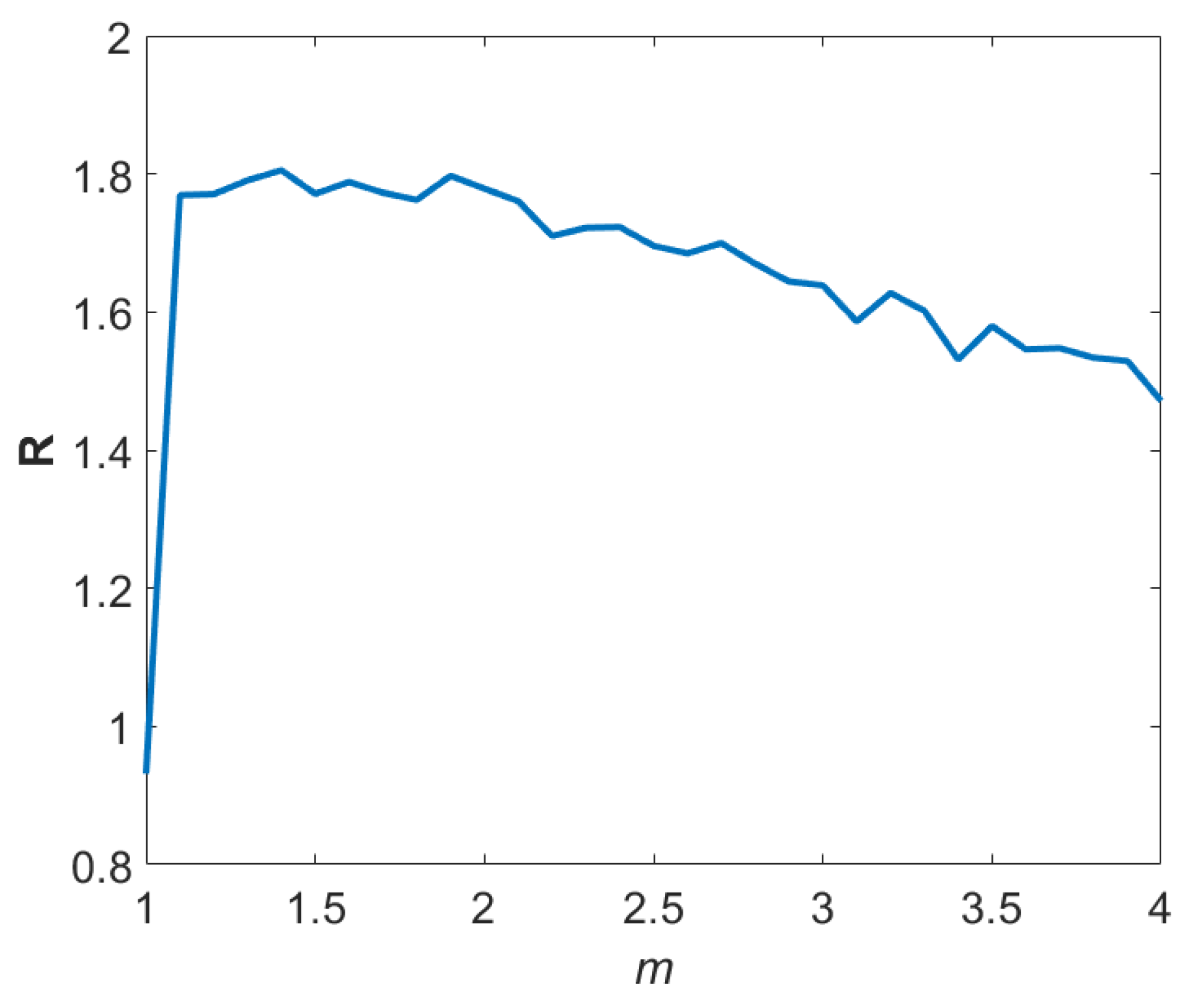
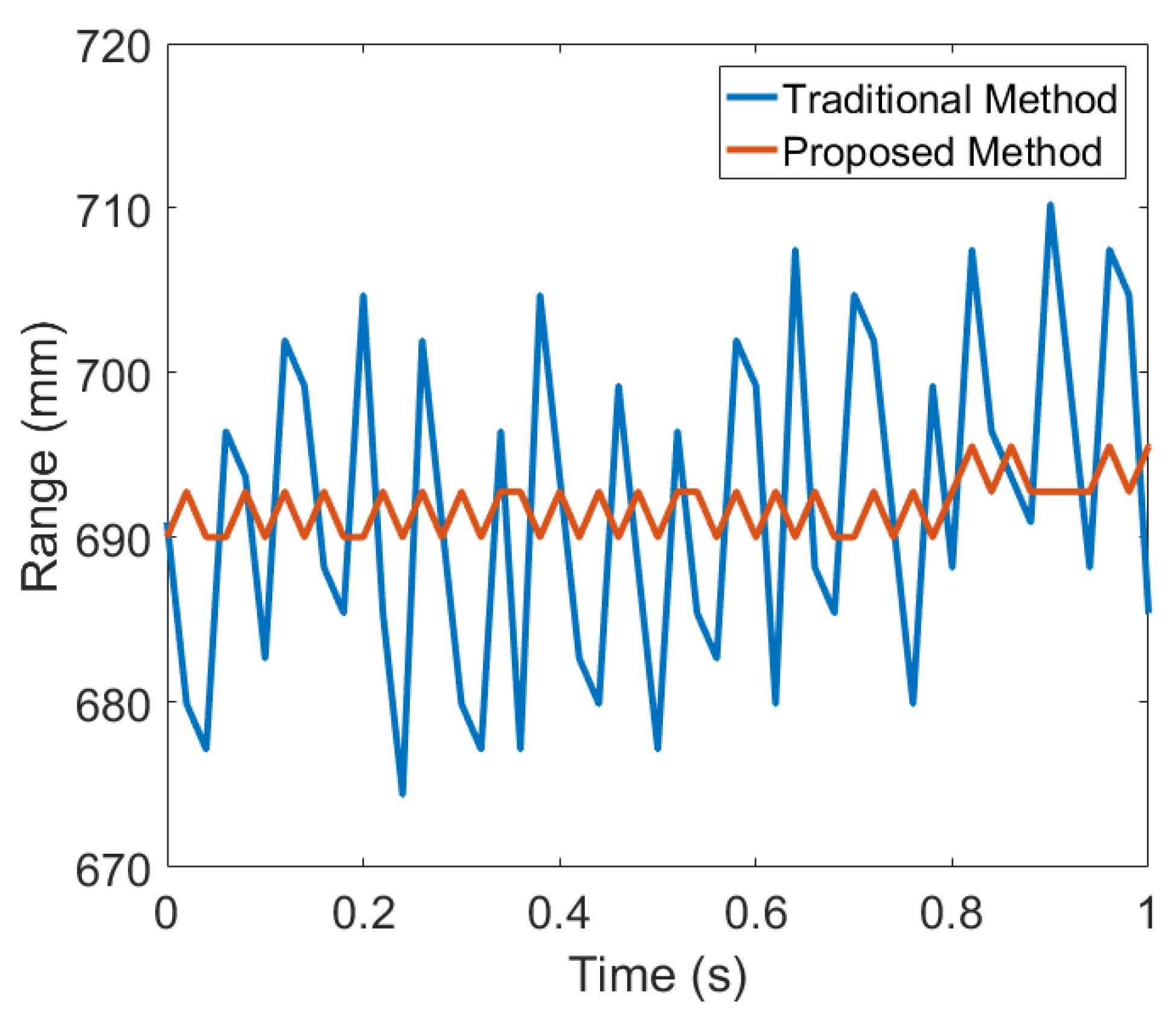
3. Simulation Results
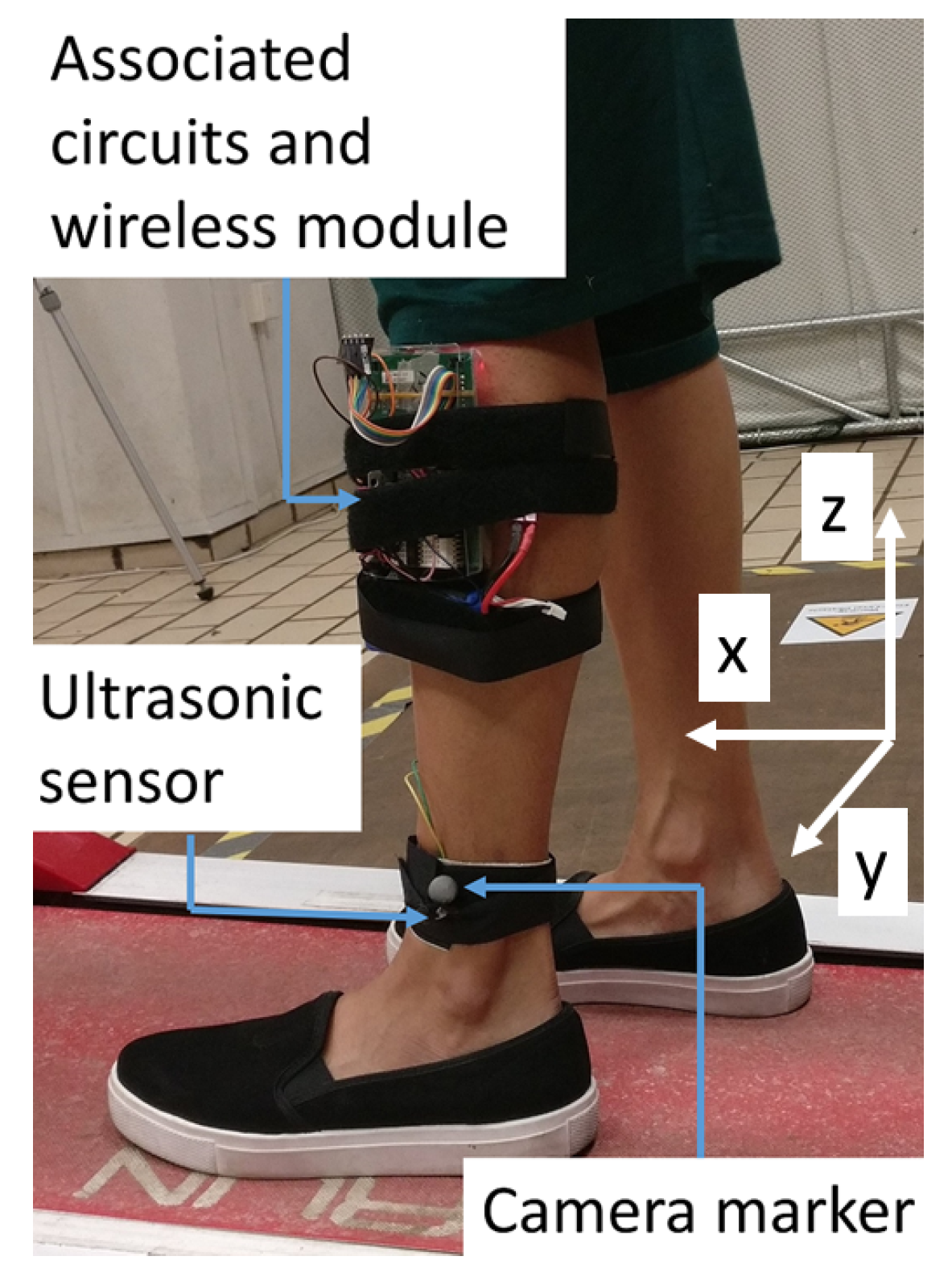
4. Materials and Methods
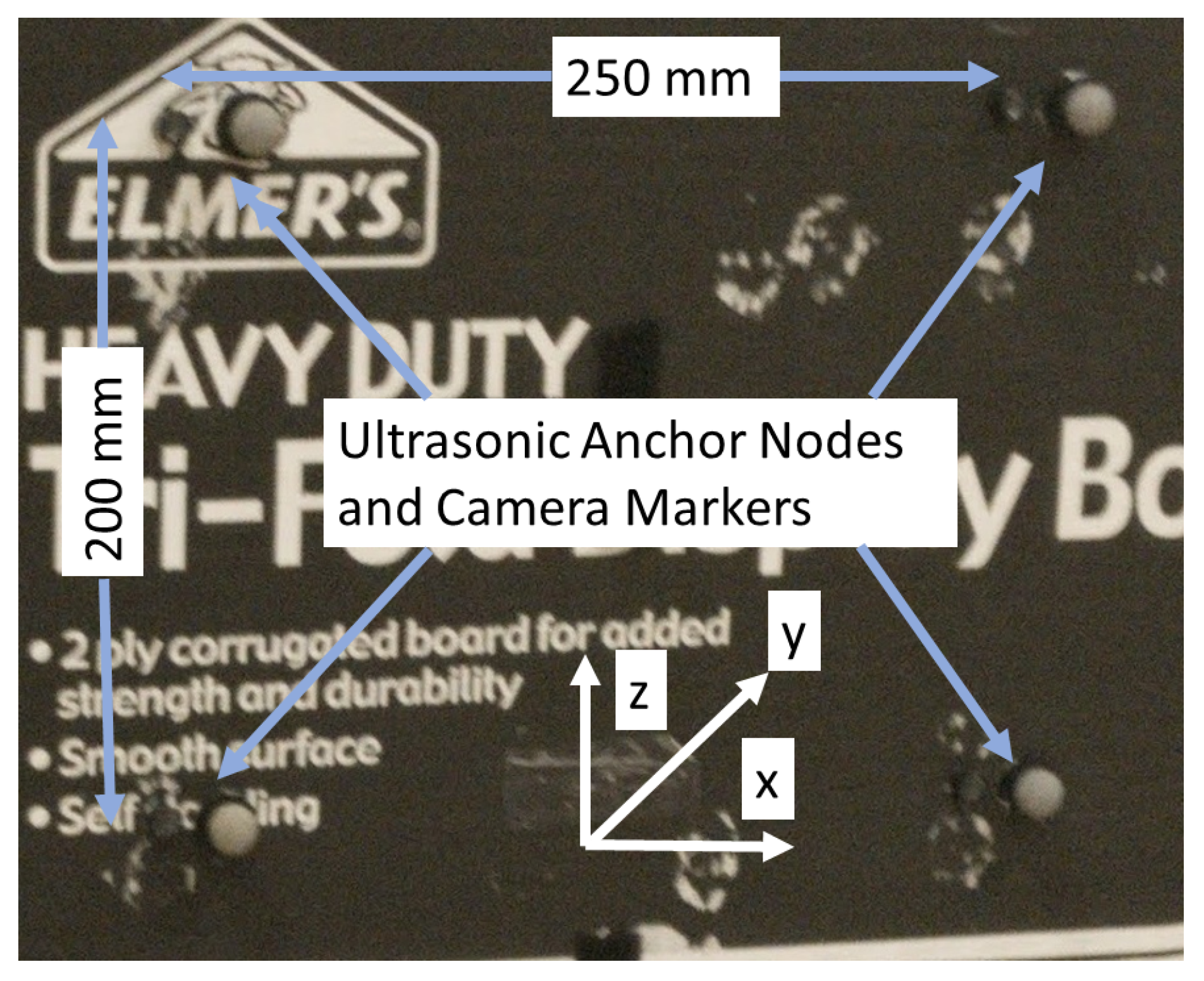
4.1. Ultrasonic Ranging Experiment
4.2. Gait Analysis System
4.3. Estimation of Gait Parameters
4.3.1. Stride Time (ST)
4.3.2. Stride Length (SL)
4.3.3. Swing Time (SW)
4.3.4. Stance Time (STT)
4.3.5. Maximum Foot Clearance (MFC)
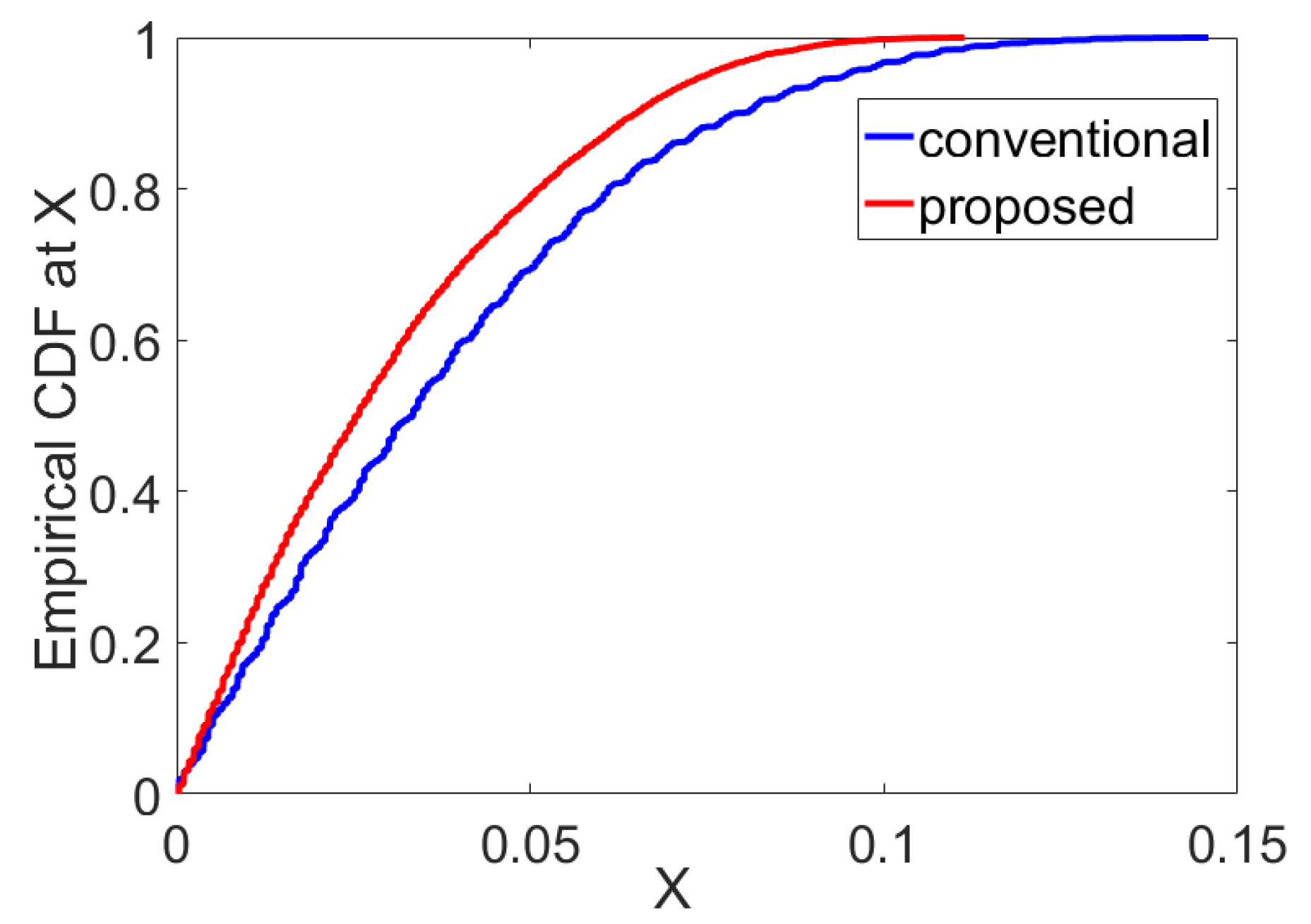
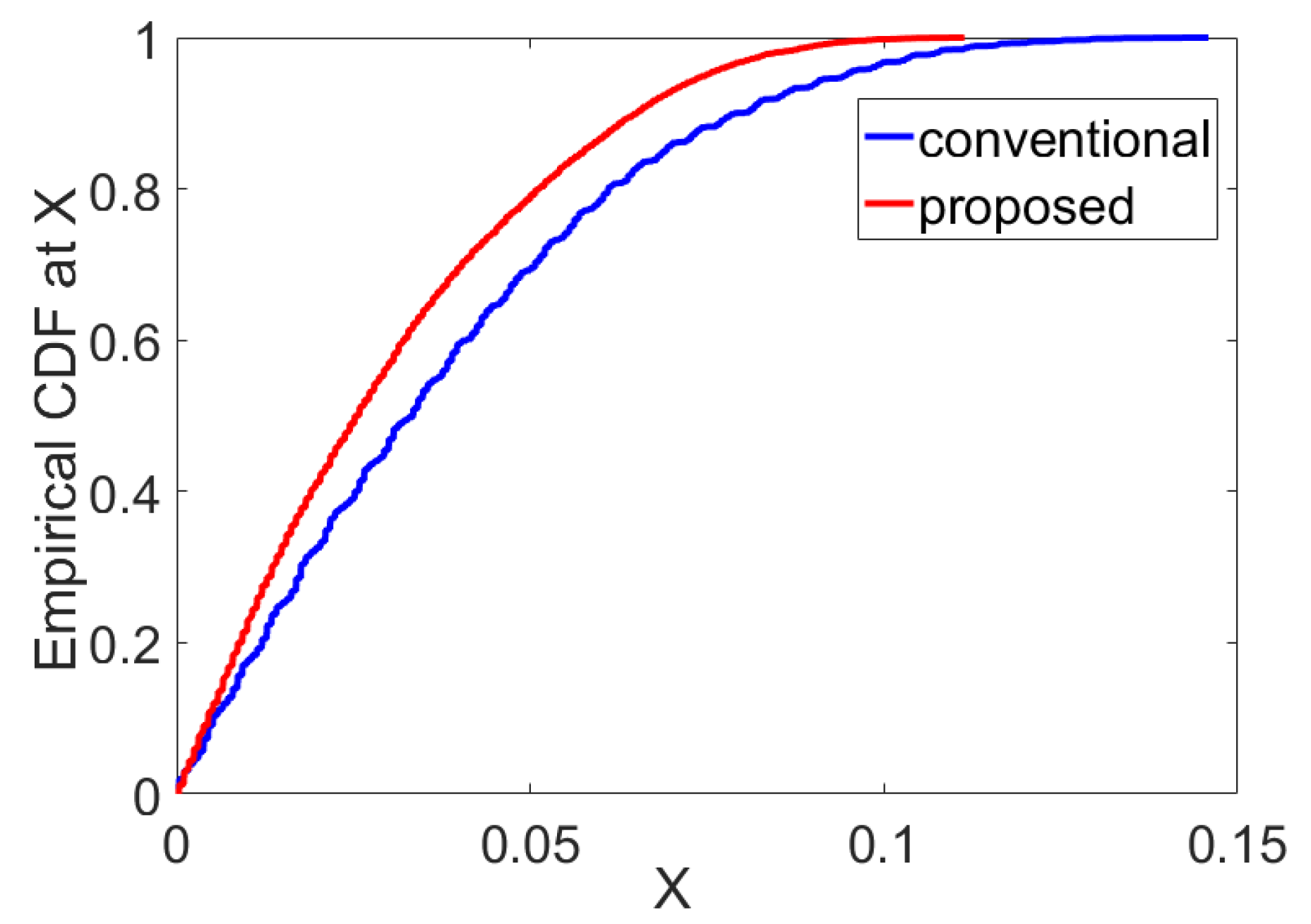
5. Results and Discussion
Comparison of Estimated Gait Parameters
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| LOS | Line of Sight |
| NLOS | Non-Line of Sight |
| RMSE | Root Mean Square Error |
| UKF | Unscented Kalman Filter |
| ToF | Time of Flight |
| UWB | Ultrawideband |
| ADC | Analog to Digital Converter |
| MUSIC | Multiple Signal Classification |
References
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S. Ambulatory measurement of three-dimensional foot displacement during treadmill walking using wearable wireless ultrasonic sensor network. IEEE J. Biomed. Health Inform. 2015, 19, 446–452. [Google Scholar] [CrossRef] [PubMed]
- Shaban, H.A.; El-Nasr, M.A.; Buehrer, R.M. Toward a highly accurate ambulatory system for clinical gait analysis via UWB radios. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 284–291. [Google Scholar] [CrossRef]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed]
- Van den Noort, J.C.; Ferrari, A.; Cutti, A.G.; Becher, J.G.; Harlaar, J. Gait analysis in children with cerebral palsy via inertial and magnetic sensors. Med. Biol. Eng. Comput. 2013, 51, 377–386. [Google Scholar] [CrossRef] [PubMed]
- Pallejà, T.; Teixidó, M.; Tresanchez, M.; Palacín, J. Measuring gait using a ground laser range sensor. Sensors 2009, 9, 9133–9146. [Google Scholar] [CrossRef] [PubMed]
- Phan Ba, R.; Pierard, S.; Moonen, G.; Van Droogenbroeck, M.; Belachew, S. Detection and quantification of efficiency and quality of gait impairment in multiple sclerosis through foot path analysis. Mult. Scler. J. 2012, 18, 110. [Google Scholar]
- Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef]
- Ashhar, K.; Soh, C.B.; Kong, K.H. Wireless Ultrawideband Sensor Network for Gait Analysis in Rehabilitation Clinics. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 1524–1529. [Google Scholar]
- Ashhar, K.; Soh, C.B.; Kong, K.H. A wearable ultrasonic sensor network for analysis of bilateral gait symmetry. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Seogwipo, Korea, 14 September 2017; pp. 4455–4458. [Google Scholar]
- Zheng, H.; Black, N.D.; Harris, N.D. Position-sensing technologies for movement analysis in stroke rehabilitation. Med. Biol. Eng. Comput. 2005, 43, 413–420. [Google Scholar] [CrossRef]
- Raab, F.H.; Blood, E.B.; Steiner, T.O.; Jones, H.R. Magnetic position and orientation tracking system. IEEE Trans. Aerosp. Electron. Syst. 1979, 709–718. [Google Scholar] [CrossRef]
- Abadia, M.F.; Sillero-Quintana, M.; Calvo, P.A.M. Applying Topographic Techniques to Modelling the Human Shape in Motion. In Proceedings of the Second Workshop on Digital Media and its Application in Museum & Heritages (DMAMH 2007), Chongqing, China, 10–12 December 2007; pp. 169–172. [Google Scholar]
- Qi, Y.; Soh, C.B.; Gunawan, E.; Low, K.S.; Thomas, R. Assessment of foot trajectory for human gait phase detection using wireless ultrasonic sensor network. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 88–97. [Google Scholar] [CrossRef]
- Khyam, M.O.; Alam, M.J.; Lambert, A.J.; Benson, C.R.; Pickering, M.R. High precision ultrasonic positioning using a robust optimization approach. In Proceedings of the 2013 18th International Conference on Digital Signal Processing (DSP), Fira, Greece, 1–3 July 2013; pp. 1–6. [Google Scholar]
- Qi, Y. Wearable Human Motion Tracking and Analysis System Based on Wireless Sensor Network. Ph.D. Thesis, School of Electrical and Electronic Engineering, Nanyang Technological University, Hong Kong, China, 2015. [Google Scholar]
- Khyam, M.O.; Ge, S.S.; Li, X.; Pickering, M.R. Highly accurate time-of-flight measurement technique based on phase-correlation for ultrasonic ranging. IEEE Sens. J. 2017, 17, 434–443. [Google Scholar] [CrossRef]
- Queiros, R.; Alegria, F.C.; Girao, P.S.; Serra, A.C. Cross-correlation and sine-fitting techniques for high-resolution ultrasonic ranging. IEEE Trans. Instrum. Meas. 2010, 59, 3227–3236. [Google Scholar] [CrossRef]
- Piontek, H.; Seyffer, M.; Kaiser, J. Improving the accuracy of ultrasound-based localisation systems. Pers. Ubiquitous Comput. 2007, 11, 439–449. [Google Scholar] [CrossRef]
- Khyam, M.O.; Noor-A-Rahim, M.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Salemian, S.; Keivani, H.; Mahdiyar, O. Comparison of radar pulse compression techniques. In Proceedings of the 2005 IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Beijing, China, 8–12 August 2005; Volume 2, pp. 1076–1079. [Google Scholar]
- Atkins, P.; Collins, T.; Foote, K. Transmit-signal design and processing strategies for sonar target phase measurement. IEEE J. Sel. Top. Signal Process. 2007, 1, 91–104. [Google Scholar] [CrossRef]
- Ashhar, K.; Khyam, M.; Soh, C.; Kong, K. A Doppler-Tolerant Ultrasonic Multiple Access Localization System for Human Gait Analysis. Sensors 2018, 18, 2447. [Google Scholar] [CrossRef]
- Saad, M.M.; Bleakley, C.J.; Dobson, S. Robust high-accuracy ultrasonic range measurement system. IEEE Trans. Instrum. Meas. 2011, 60, 3334–3341. [Google Scholar] [CrossRef]
- Farrokhi, H. TOA estimation using MUSIC super-resolution techniques for an indoor audible chirp ranging system. In Proceedings of the 2007 IEEE International Conference on Signal Processing and Communications, Dubai, UAE, 24–27 November 2007; pp. 987–990. [Google Scholar]
- Yamada, H.; Ohmiya, M.; Ogawa, Y.; Itoh, K. Superresolution techniques for time-domain measurements with a network analyzer. IEEE Trans. Antennas Propag. 1991, 39, 177–183. [Google Scholar] [CrossRef]
- Hasan, M.A.; Azimi-Sadjadi, M.R.; Dobeck, G.J. Separation of multiple time delays using new spectral estimation schemes. IEEE Trans. Signal Process. 1998, 46, 1580–1590. [Google Scholar] [CrossRef] [Green Version]
- Hua, Y.; Sarkar, T.K. On SVD for estimating generalized eigenvalues of singular matrix pencil in noise. In Proceedings of the IEEE International Sympoisum on Circuits and Systems, Singapore, 11–14 June 1991; pp. 2780–2783. [Google Scholar]
- De Angelis, A.; Moschitta, A.; Carbone, P.; Calderini, M.; Neri, S.; Borgna, R.; Peppucci, M. Design and characterization of a portable ultrasonic indoor 3-D positioning system. IEEE Trans. Instrum. Meas. 2015, 64, 2616–2625. [Google Scholar] [CrossRef]
- Marioli, D.; Narduzzi, C.; Offelli, C.; Petri, D.; Sardini, E.; Taroni, A. Digital time-of-flight measurement for ultrasonic sensors. IEEE Trans. Instrum. Meas. 1992, 41, 93–97. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y. A Study of RF-Over-Fibre Based Active RFID Indoor Location System. Ph.D. Thesis, UCL (University College London), London, UK, 2011. [Google Scholar]
- Virolainen, T.; Eskelinen, J.; Hæggström, E. Frequency domain low time-bandwidth product chirp synthesis for pulse compression side lobe reduction. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009; pp. 1526–1528. [Google Scholar] [CrossRef]
- Misaridis, T.; Jensen, J.A. Use of modulated excitation signals in medical ultrasound. Part I: Basic concepts and expected benefits. IEEE Transa. Ultrasonics Ferroelectr. Freq. Control 2005, 52, 177–191. [Google Scholar] [CrossRef]
- Gan, T.; Hutchins, D.; Billson, D.; Schindel, D. The use of broadband acoustic transducers and pulse-compression techniques for air-coupled ultrasonic imaging. Ultrasonics 2001, 39, 181–194. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal processing, sensor fusion, and target recognition VI. International Society for Optics and Photonics, Orlando, FL, USA, 28 July 1997; Volume 3068, pp. 182–194. [Google Scholar]
- Särkkä, S. Unscented Rauch–Tung–Striebel Smoother. IEEE Trans. Autom. Control 2008, 53, 845–849. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, L. Sensor localization under limited measurement capabilities. IEEE Netw. 2007, 21, 16–23. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Window | m | (mm) | (mm) | (mm) | (mm) | N(I) | N(D) | R |
|---|---|---|---|---|---|---|---|---|
| Rectangular | 2 | 14.8 | 8.4 | 55.8 | 35.9 | 6897 | 3046 | 1.76 |
| 3 | 16.8 | 10.1 | 63.4 | 44.1 | 6826 | 3117 | 1.66 | |
| 4 | 18.2 | 12.4 | 68.3 | 55.2 | 6614 | 3336 | 1.47 | |
| Hann | 2 | 21.6 | 10.9 | 104.8 | 116.5 | 7129 | 2826 | 1.98 |
| 3 | 24.6 | 12.2 | 119.3 | 253.7 | 7135 | 2825 | 2.01 | |
| 4 | 26.5 | 14.2 | 118.6 | 446 | 7125 | 2842 | 1.87 | |
| Hamming | 2 | 22.2 | 10 | 97.9 | 69.6 | 7365 | 2603 | 2.22 |
| 3 | 25.9 | 11.3 | 120 | 129.6 | 7300 | 2660 | 2.29 | |
| 4 | 27.7 | 12.4 | 117.9 | 253.8 | 7310 | 2654 | 2.24 |
| Method | High Multi-Path (mm) | Low Multipath (mm) | ||||
|---|---|---|---|---|---|---|
| Proposed | 26.63 | 2.66 | 2.61 | 7.70 | 2.27 | 2.26 |
| Classical | 44.10 | 10.34 | 10.41 | 22.24 | 10.68 | 10.32 |
| Method | Proposed Method (mm) | Classical Method (mm) | ||||
|---|---|---|---|---|---|---|
| Coordinate | x | y | z | x | y | z |
| Mean Error | −0.94 | −0.05 | 0.61 | −0.97 | 0.24 | 0.19 |
| STD Error | 15.92 | 8.09 | 12.71 | 18.96 | 9.68 | 18.04 |
| RMSE | 16.04 | 8.14 | 12.92 | 19.32 | 9.79 | 18.40 |
| Subject | 1 | 2 | 3 | 4 | 5 | ||
|---|---|---|---|---|---|---|---|
| Stride Length (mm) | Camera | Mean | 995.74 | 898.76 | 1003.62 | 1204.28 | 932.1 |
| STD | 68.95 | 93.12 | 135.36 | 160.69 | 125.93 | ||
| Ultrasound | Mean | 1083.44 | 969.01 | 1069.37 | 1303.94 | 1016.46 | |
| STD | 71.67 | 107.43 | 144.05 | 173.94 | 143.88 | ||
| RMSE | 88.68 | 75.83 | 69.99 | 102.47 | 91.13 | ||
| Stance Time (ms) | Camera | Mean | 802.08 | 648.93 | 720.27 | 835.92 | 645.72 |
| STD | 35.34 | 59.98 | 77.79 | 44.83 | 35.44 | ||
| Ultrasound | Mean | 798.12 | 642.95 | 714.64 | 833.9 | 631.98 | |
| STD | 36.52 | 63.97 | 84.06 | 40.27 | 38.86 | ||
| RMSE | 16.4 | 15.79 | 15.19 | 10.61 | 19.33 | ||
| Swing Time (ms) | Camera | Mean | 521.46 | 402.78 | 459.91 | 483.33 | 431.76 |
| STD | 13.19 | 21.57 | 25.29 | 26.82 | 19.03 | ||
| Ultrasound | Mean | 525 | 408.76 | 465.76 | 484.48 | 445.04 | |
| STD | 16.77 | 23.49 | 25.74 | 32.02 | 19.88 | ||
| RMSE | 15.65 | 15.45 | 16.78 | 12.95 | 17.27 | ||
| Max. Foot Clearance (mm) | Camera | Mean | 140.24 | 107.49 | 125.63 | 130.61 | 146.2 |
| STD | 6.05 | 10.87 | 10.82 | 9.89 | 14.11 | ||
| Ultrasound | Mean | 143.55 | 103.56 | 121.11 | 143.56 | 135.36 | |
| STD | 9.42 | 13.7 | 15.29 | 13.67 | 16.94 | ||
| RMSE | 9.12 | 10.42 | 11.58 | 16.47 | 15.19 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ashhar, K.; Khyam, M.O.; Soh, C.B. A Multi-Path Compensation Method for Ranging in Wearable Ultrasonic Sensor Networks for Human Gait Analysis. Sensors 2019, 19, 1350. https://doi.org/10.3390/s19061350
Ashhar K, Khyam MO, Soh CB. A Multi-Path Compensation Method for Ranging in Wearable Ultrasonic Sensor Networks for Human Gait Analysis. Sensors. 2019; 19(6):1350. https://doi.org/10.3390/s19061350
Chicago/Turabian StyleAshhar, Karalikkadan, Mohammad Omar Khyam, and Cheong Boon Soh. 2019. "A Multi-Path Compensation Method for Ranging in Wearable Ultrasonic Sensor Networks for Human Gait Analysis" Sensors 19, no. 6: 1350. https://doi.org/10.3390/s19061350
APA StyleAshhar, K., Khyam, M. O., & Soh, C. B. (2019). A Multi-Path Compensation Method for Ranging in Wearable Ultrasonic Sensor Networks for Human Gait Analysis. Sensors, 19(6), 1350. https://doi.org/10.3390/s19061350