A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation


Abstract
1. Introduction
2. Attitude Estimation Based on Complementary Filtering
2.1. Attitude Description
2.2. Attitude Estimation by Gyroscope
2.3. Attitude Estimation by Accelerometer/Magnetometer
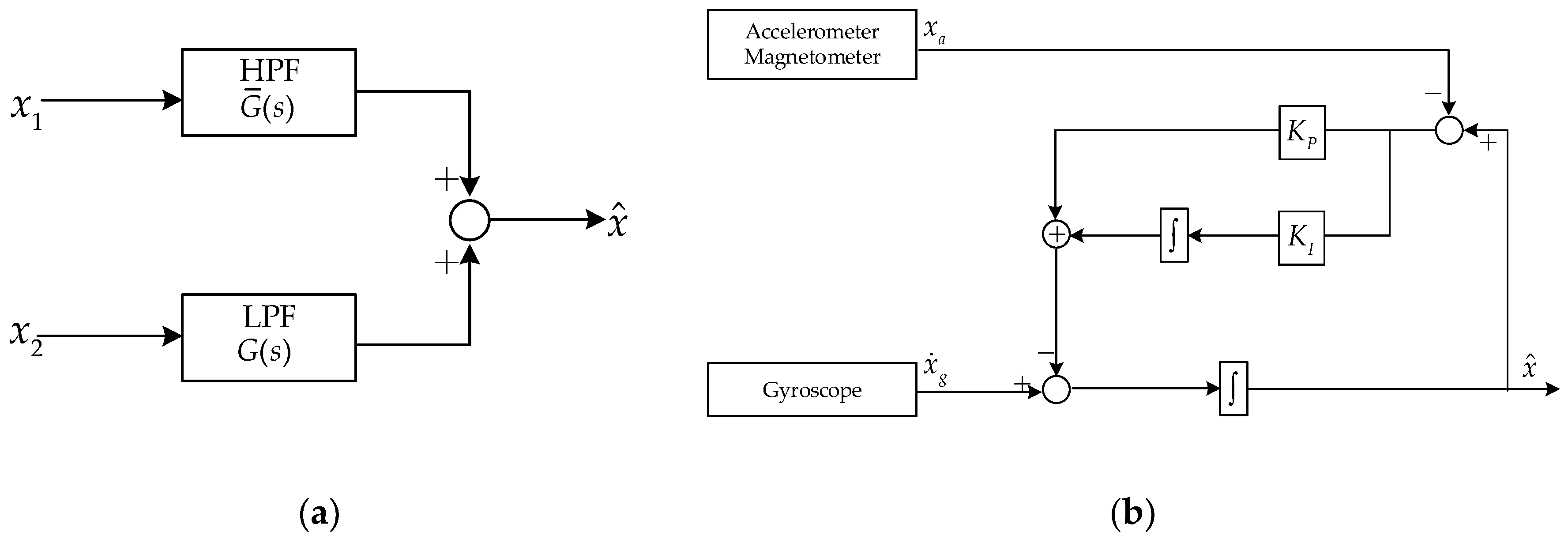
2.4. Complementary Filtering Algorithm
3. Improved Algorithm for NCF
3.1. Proposed of First-Order Differential Data Processing Algorithm for Gyroscope
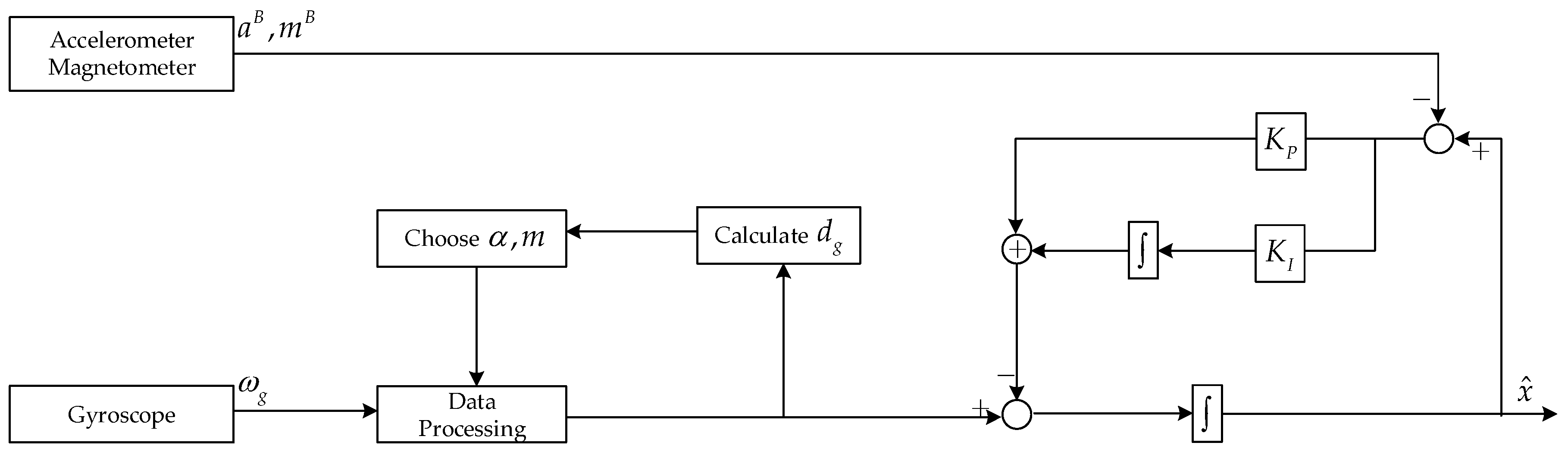
3.2. Design Adaptive Adjustment Strategy for Constants and Proposed of D-NCF
- Note the current measurements of the gyroscope, accelerometer, and magnetometer which are , , and , respectively.
- Depending on the and values calculated before, the gyroscope measurements are processed by the first-order differential data processing algorithm.
- The attitude angle is obtained by solving the dynamic differential equation according to the gyroscope measurements, and the attitude angle is obtained by using the triad algorithm according to the accelerometer and magnetometer measurements. Then, using the NCF algorithm to achieve the fusion of and , we get the comprehensive attitude angle .
- Calculate according to , and then update , to prepare for processing the next gyroscope measurement.
4. Experimental Verification of the D-NCF Algorithm
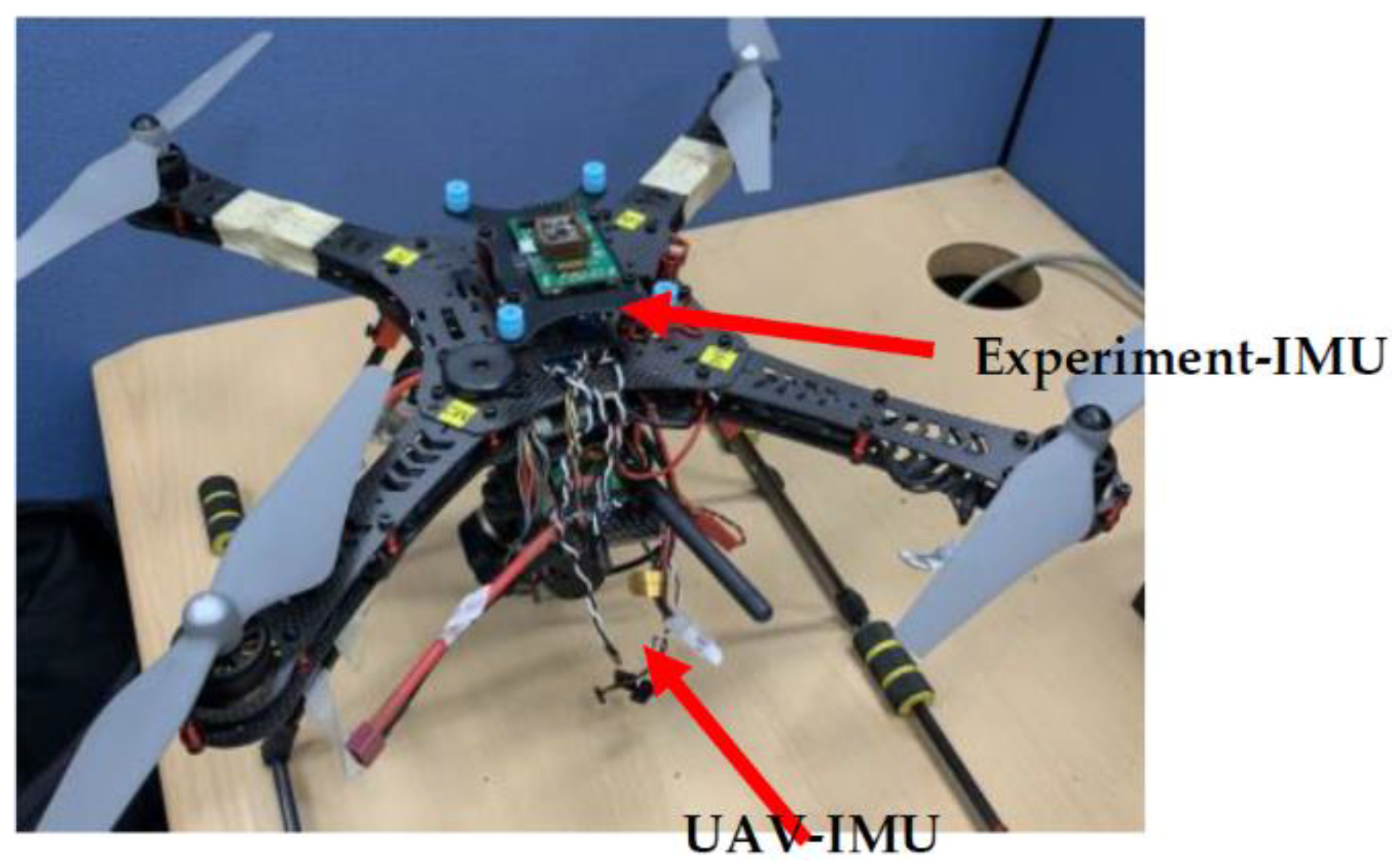
4.1. Experimental Setup
4.2. Experiment Results and Discussion
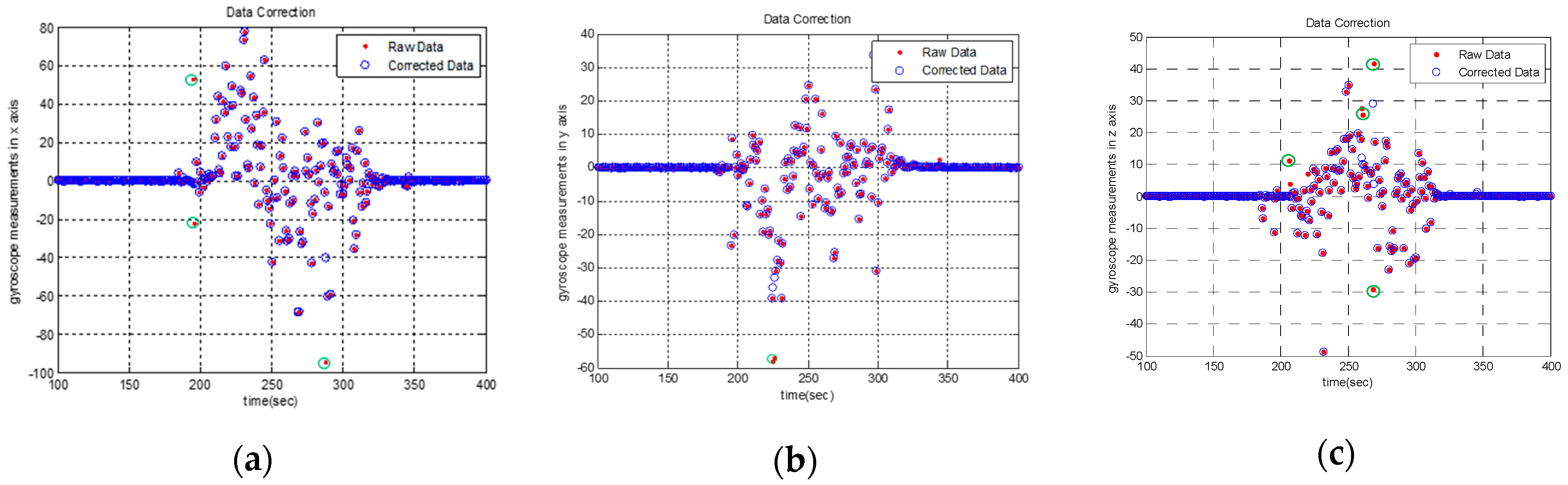
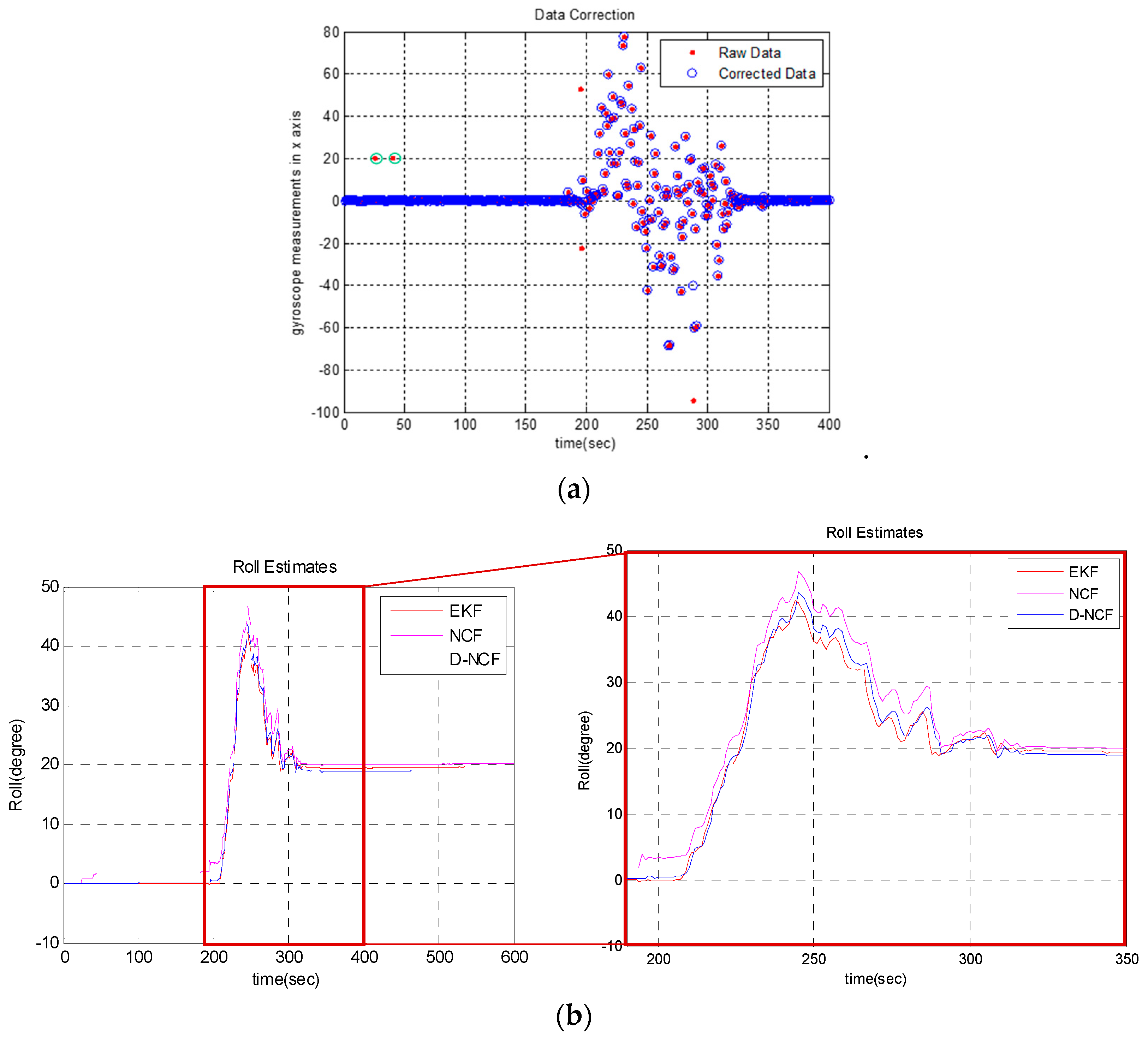
4.2.1. First-Order Differential Data Processing Algorithm for Gyroscope
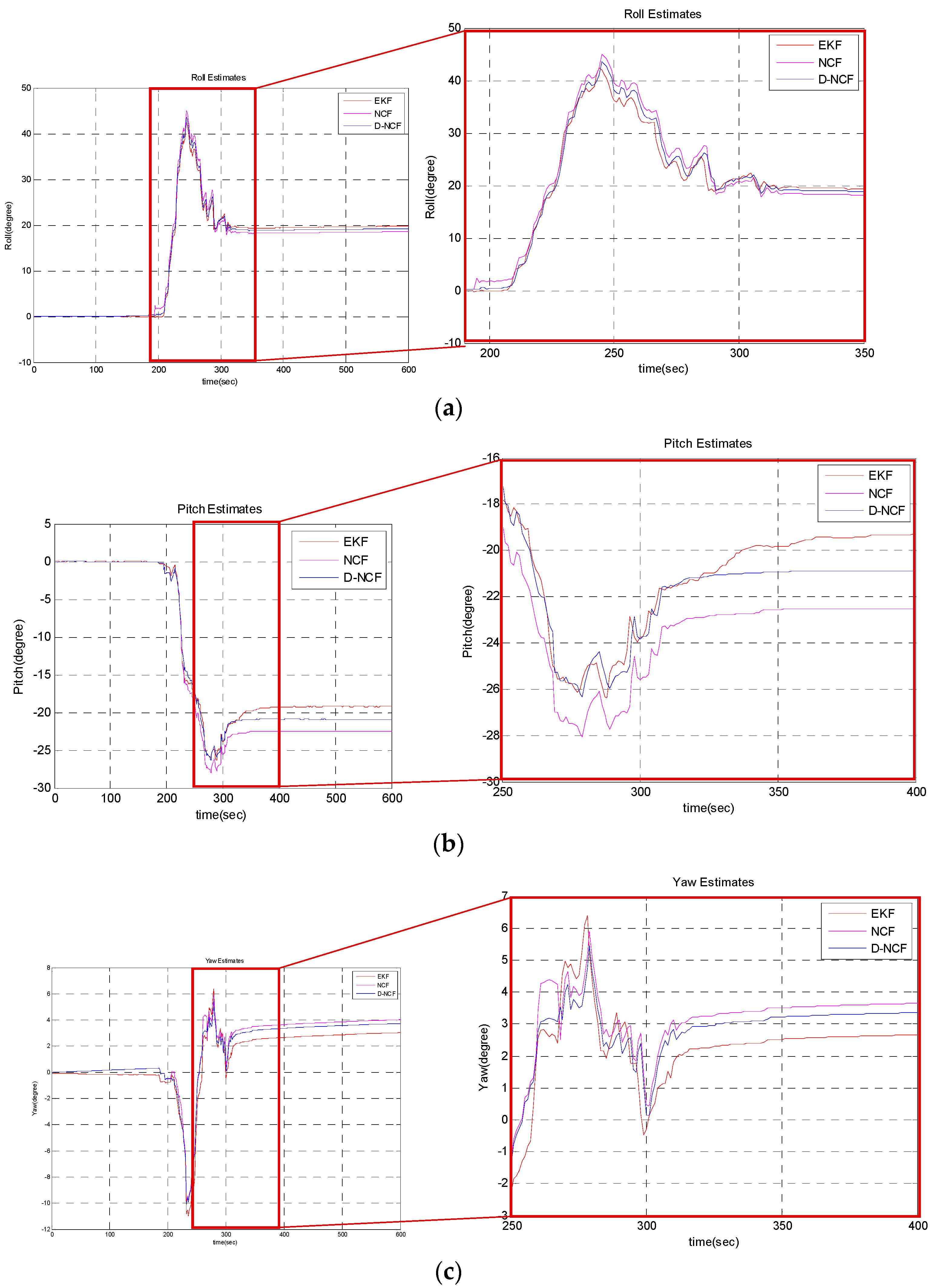
4.2.2. Attitude Estimation Accuracy of D-NCF Algorithm
X2 = attitude angle (D-NCF)-attitude angle (EKF)M
4.2.3. Robustness of D-NCF Algorithm
4.3. Discussion of Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, M.; Yang, Y.C.; Hatch, R.R.; Zhang, Y.H. Adaptive filter for a miniature MEMS based attitude and heading reference system. In Proceedings of the PLANS 2004: Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; IEEE: New York, NY, USA, 2004; pp. 193–200. [Google Scholar]
- Jiang, C.H.; Chen, S.; Chen, Y.W.; Zhang, B.Y.; Feng, Z.Y.; Zhou, H.; Bo, Y.M. A MEMS IMU De-Noising Method Using Long Short Term Memory Recurrent Neural Networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef] [PubMed]
- Mansoor, S.; Bhatti, U.I.; Bhatti, A.I.; Ali, S.M.D. Improved attitude determination by compensation of gyroscopic drift by use of accelerometers and magnetometers. Measurement 2019, 131, 582–589. [Google Scholar] [CrossRef]
- Bachmann, E.R.; Yun, X.P.; Brumfield, A. Limitations of attitude estimation algorithms for inertial/Magnetic sensor modules. IEEE Robot. Autom. Mag. 2007, 14, 76–87. [Google Scholar] [CrossRef]
- Chang, L.B.; Zha, F.; Qin, F.J. Indirect Kalman Filtering Based Attitude Estimation for Low-Cost Attitude and Heading Reference Systems. IEEE-ASME Trans. Mechatron. 2017, 22, 1850–1858. [Google Scholar] [CrossRef]
- Ko, N.Y.; Youn, W.; Choi, I.H.; Song, G.; Kim, T.S. Features of Invariant Extended Kalman Filter Applied to Unmanned Aerial Vehicle Navigation. Sensors 2018, 18, 2855. [Google Scholar] [CrossRef]
- Munguia, R.; Grau, A. A Practical Method for Implementing an Attitude and Heading Reference System. Int. J. Adv. Robot. Syst. 2014, 11, 62. [Google Scholar] [CrossRef]
- Jensen, K.J. Generalized Nonlinear Complementary Attitude Filter. J. Guid. Control Dyn. 2011, 34, 1588–1593. [Google Scholar] [CrossRef]
- Stovner, B.N.; Johansen, T.A.; Fossen, T.I.; Schjolberg, I. Attitude estimation by multiplicative exogenous Kalman filter. Automatica 2018, 95, 347–355. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Liu, F.; Li, J.; Wang, H.F.; Liu, C. An improved quaternion Gauss-Newton algorithm for attitude determination using magnetometer and accelerometer. Chin. J. Aeronaut. 2014, 27, 986–993. [Google Scholar] [CrossRef]
- Tian, Y.; Wei, H.X.; Tan, J.D. An Adaptive-Gain Complementary Filter for Real-Time Human Motion Tracking with MARG Sensors in Free-Living Environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 254–264. [Google Scholar] [CrossRef]
- Cao, D.; Qu, Q.A.; Li, C.T.; He, C.L. Research of Attitude Estimation of UAV Based on Information Fusion of Complementary Filter. In Proceedings of the 2009 Fourth International Conference on Computer Sciences and Convergence Information Technology, Seoul, Korea, 24–26 November 2009; IEEE: New York, NY, USA, 2009; pp. 1290–1293. [Google Scholar]
- Kottath, R.; Narkhede, P.; Kumar, V.; Karar, V.; Poddar, S. Multiple Model Adaptive Complementary Filter for Attitude Estimation. Aerosp. Sci. Technol. 2017, 69, 574–581. [Google Scholar] [CrossRef]
- Poddar, S.; Narkhede, P.; Kumar, V.; Kumar, A. PSO Aided Adaptive Complementary Filter for Attitude Estimation. J. Intell. Robot. Syst. 2017, 87, 531–534. [Google Scholar] [CrossRef]
- Li, X.; Li, Q. External Acceleration Elimination for Complementary Attitude Filter. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; IEEE: New York, NY, USA, 2017; pp. 208–212. [Google Scholar]
- Yang, Q.Q.; Sun, L.L. A fuzzy complementary Kalman filter based on visual and IMU data for UAV landing. Optik 2018, 173, 279–291. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Khamis, H.; Ngo, P.; Lovell, N.H.; Redmond, S.J. Computationally Efficient Adaptive Error-State Kalman Filter for Attitude Estimation. IEEE Sens. J. 2018, 18, 9332–9342. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Notaro, I.; Scordamaglia, V. UAV Sensor FDI in Duplex Attitude Estimation Architectures Using a Set-Based Approach. IEEE Trans. Instrum. Meas. 2018, 67, 2465–2475. [Google Scholar] [CrossRef]
- Rudin, K.; Ducard, G.J.J.; Siegwart, R.Y. A Sensor Fault Detection for Aircraft Using a Single Kalman Filter and Hidden Markov Models. In Proceedings of the 2014 IEEE Conference on Control Applications, Juan Les Antibes, France, 8–10 October 2014; IEEE: New York, NY, USA, 2014; pp. 991–996. [Google Scholar]
- Ghasemi-Moghadam, S.; Homaeinezhad, M.R. Attitude determination by combining arrays of MEMS accelerometers, gyros, and magnetometers via quaternion-based complementary filter. Int. J. Numer. Model. 2018, 31, e2282. [Google Scholar] [CrossRef]
- Chen, X.C.; Cai, Y.W.; Ren, Y.; Yang, X.D.; Peng, C. Spacecraft Angular Rates and Angular Acceleration Estimation Using Single-Gimbal Magnetically Suspended Control Moment Gyros. IEEE Trans. Ind. Electron. 2019, 66, 440–450. [Google Scholar] [CrossRef]
- Yang, Q.Q.; Sun, L.L.; Yang, L.Z. A Fast Adaptive-Gain Complementary Filter Algorithm for Attitude Estimation of an Unmanned Aerial Vehicle. J. Navig. 2018, 71, 1478–1491. [Google Scholar] [CrossRef]
- Namvar, M.; Safaei, F. Adaptive Compensation of Gyro Bias in Rigid-Body Attitude Estimation Using a Single Vector Measurement. IEEE Trans. Autom. Control 2013, 58, 1816–1822. [Google Scholar] [CrossRef]
- Sabatini, R.; Cappello, F.; Ramasamy, S.; Gardi, A.; Clothier, R. An innovative navigation and guidance system for small unmanned aircraft using low-cost sensors. Aircr. Eng. Aerosp. Technol. 2015, 87, 540–545. [Google Scholar] [CrossRef]
- Yuan, X.B.; Yu, S.; Zhang, S.Z.; Wang, G.P.; Liu, S. Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef]
- Roh, M.S.; Kang, B.S. Dynamic Accuracy Improvement of a MEMS AHRS for Small UAVs. Int. J. Precis. Eng. Manuf. 2018, 19, 1457–1466. [Google Scholar] [CrossRef]
- Janusz, W.; Czyba, R.; Niezabitowski, M.; Grzejszczak, T. Expansion of Attitude Determination Algorithms via Complementary Filtering. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation, Valletta, Malta, 3–6 July 2017; IEEE: New York, NY, USA, 2017; pp. 607–612. [Google Scholar]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: New York, NY, USA, 2008; pp. 340–345. [Google Scholar]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Duong, D.Q.; Sun, J.W.; Nguyen, T.P.; Luo, L. Attitude Estimation by Using MEMS IMU with Fuzzy Tuned Complementary Filter. In Proceedings of the 2016 IEEE International Conference on Electronic Information and Communication Technology (ICEICT), Harbin, China, 20–22 August 2016; IEEE: New York, NY, USA, 2016; pp. 372–378. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment-IMU | UAV-IMU | ||
|---|---|---|---|
| accelerometers | Dynamic Range | ±4 g | ±16 g |
| Digital Resolution | 0.244 mg/LSB | 0.122 mg/LSB | |
| Noise Density | 90 | 90 | |
| gyroscopes | Dynamic Range | ±500 deg/s | ±245 deg/s |
| Digital Resolution | 8.75 mdps/LSB | 4.375 mdps/LSB | |
| Noise Density | 9 | 7 | |
| magnetometers | Dynamic Range | ±12 gauss | ±8 gauss |
| Digital Resolution | 3421 LSB/gauss | 6842 LSB/gauss | |
| Noise Density | 2 mGa | 2 mGa |
| 6 | 13 | |
| 8 | 9 |
| NCF | D-NCF | |
|---|---|---|
| Roll | 1.1653 | 0.5093 |
| Pitch | 2.9638 | 1.5542 |
| Yaw | 0.9398 | 0.6827 |
| Roll | Pitch | Yaw | |
|---|---|---|---|
| Z | 3.020 | −20.5024 | 4.6646 |
| NCF | D-NCF | |
|---|---|---|
| 1 | 0.0410 s | 0.0517 s |
| 2 | 0.0440 s | 0.0553 s |
| 3 | 0.0504 s | 0.0617 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, X.; Liu, C.; Huang, Z.; Su, S.; Guo, X.; Zuo, Z.; Qu, H. A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation. Sensors 2019, 19, 1340. https://doi.org/10.3390/s19061340
Wen X, Liu C, Huang Z, Su S, Guo X, Zuo Z, Qu H. A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation. Sensors. 2019; 19(6):1340. https://doi.org/10.3390/s19061340
Chicago/Turabian StyleWen, Xudong, Chunwu Liu, Zhiping Huang, Shaojing Su, Xiaojun Guo, Zhen Zuo, and Hao Qu. 2019. "A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation" Sensors 19, no. 6: 1340. https://doi.org/10.3390/s19061340
APA StyleWen, X., Liu, C., Huang, Z., Su, S., Guo, X., Zuo, Z., & Qu, H. (2019). A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation. Sensors, 19(6), 1340. https://doi.org/10.3390/s19061340