An Intelligent Failure Detection on a Wireless Sensor Network for Indoor Climate Conditions



Abstract
1. Introduction
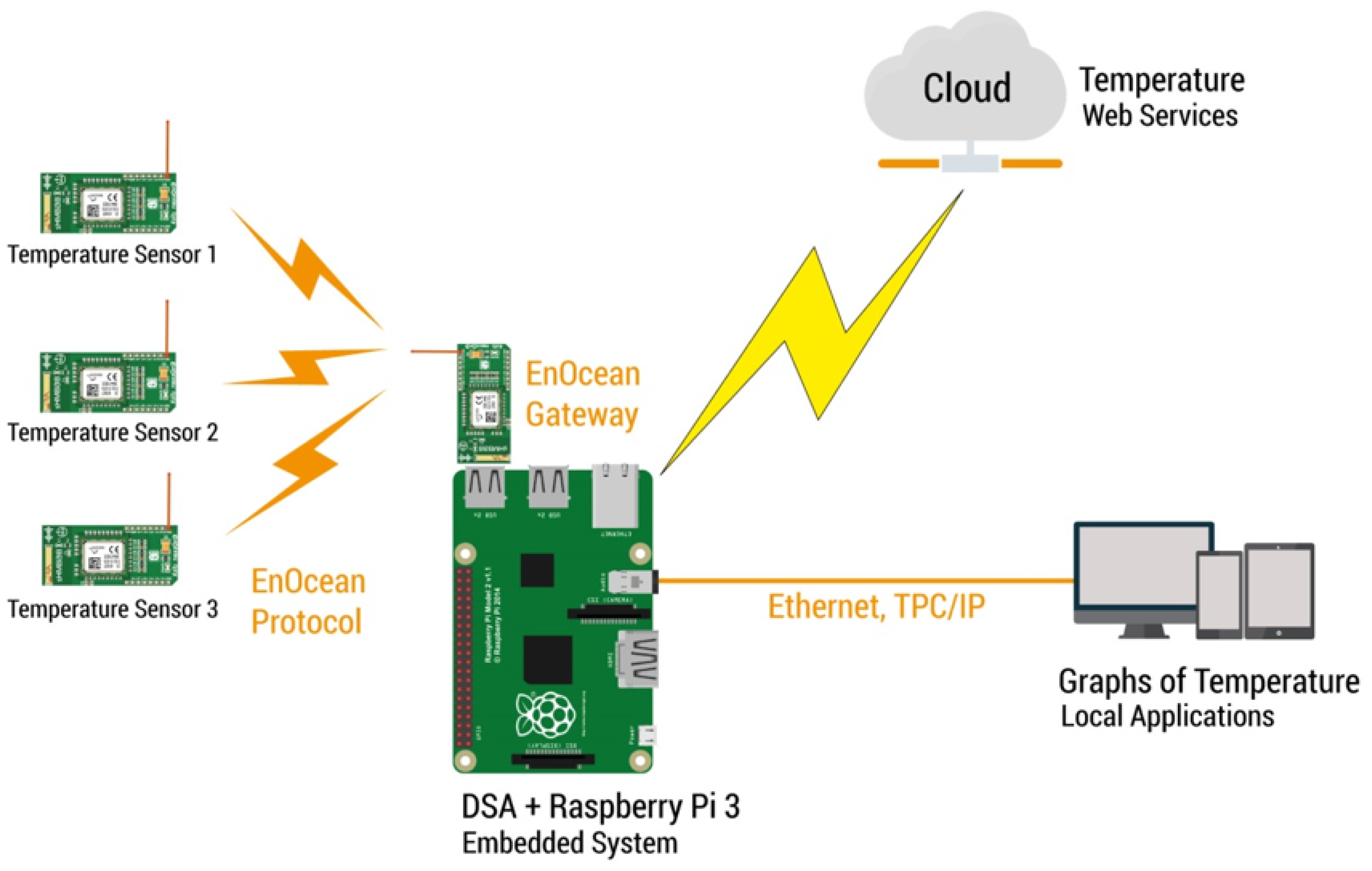
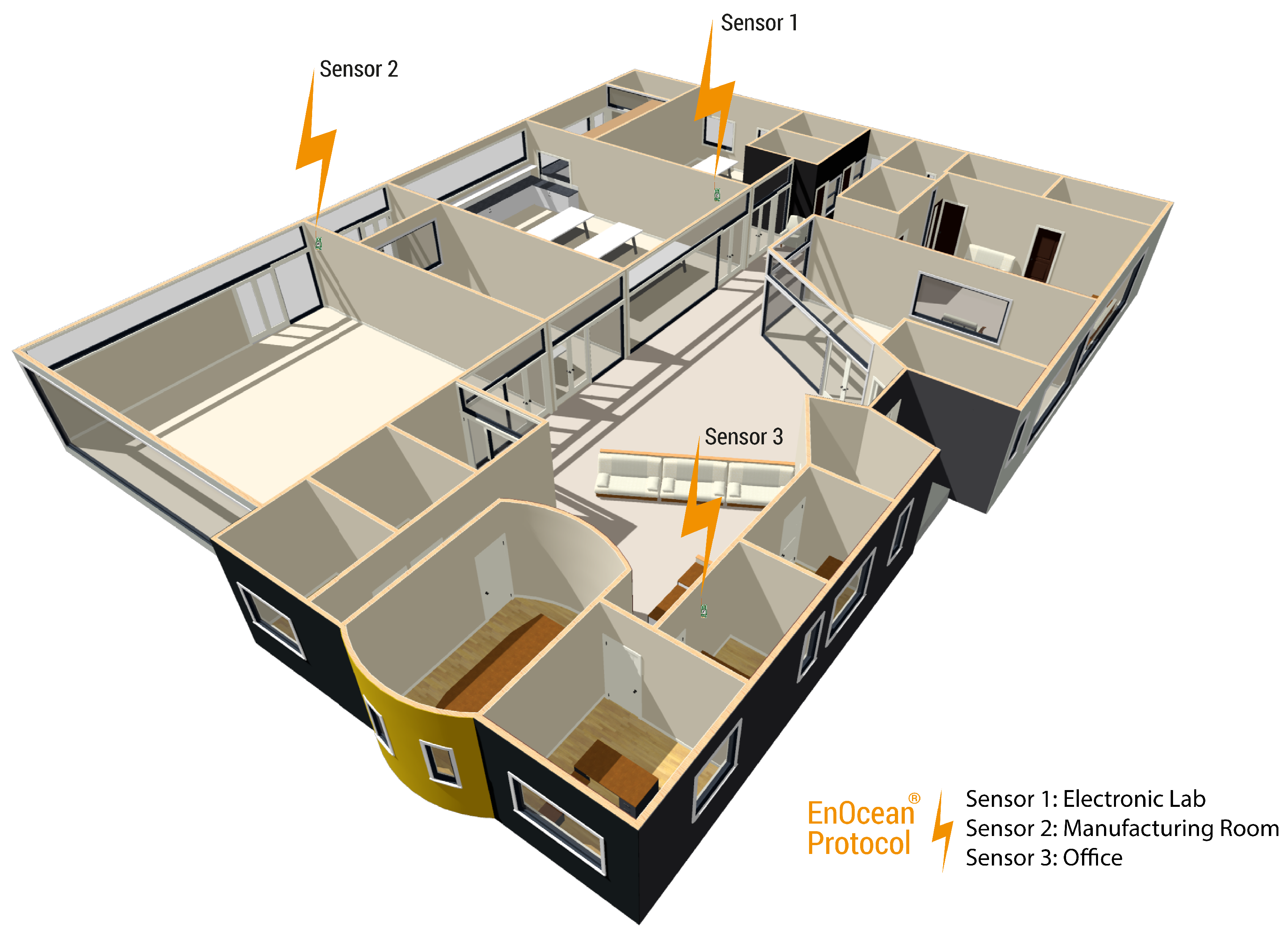
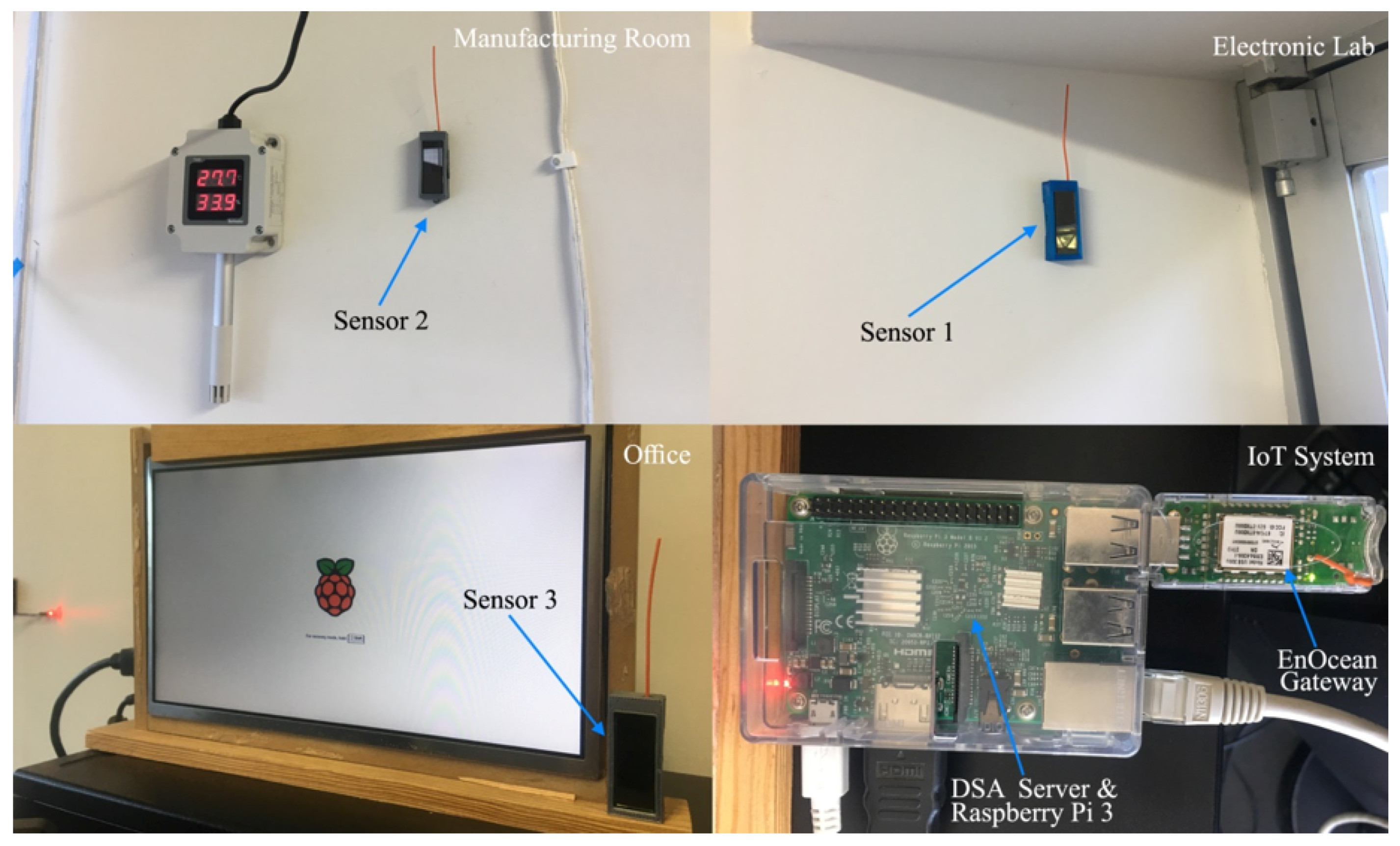
2. Prototype Development
3. Development of the Temperature Estimation and Sensor Failure Detection System
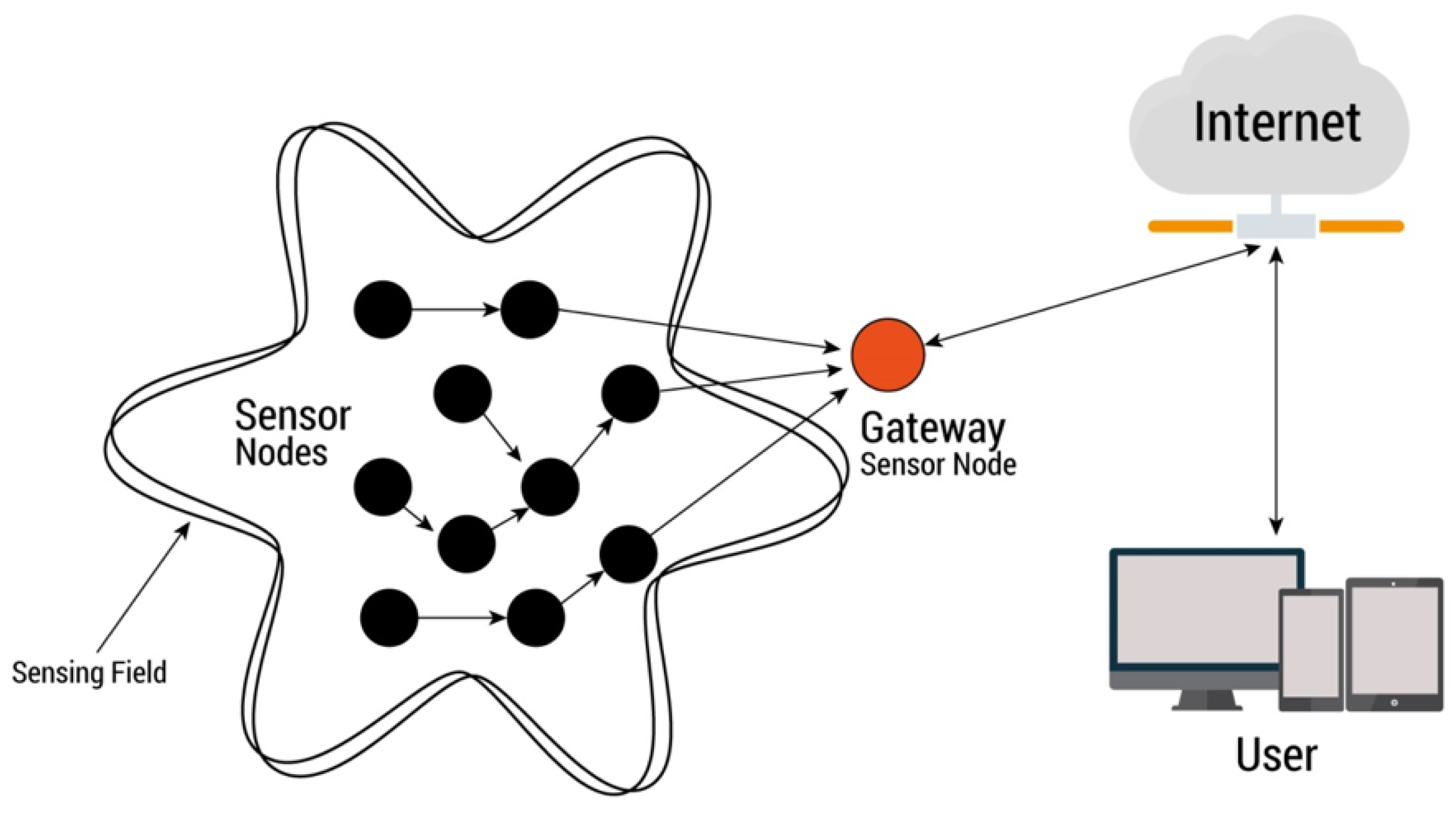
3.1. Wireless Sensor Networks
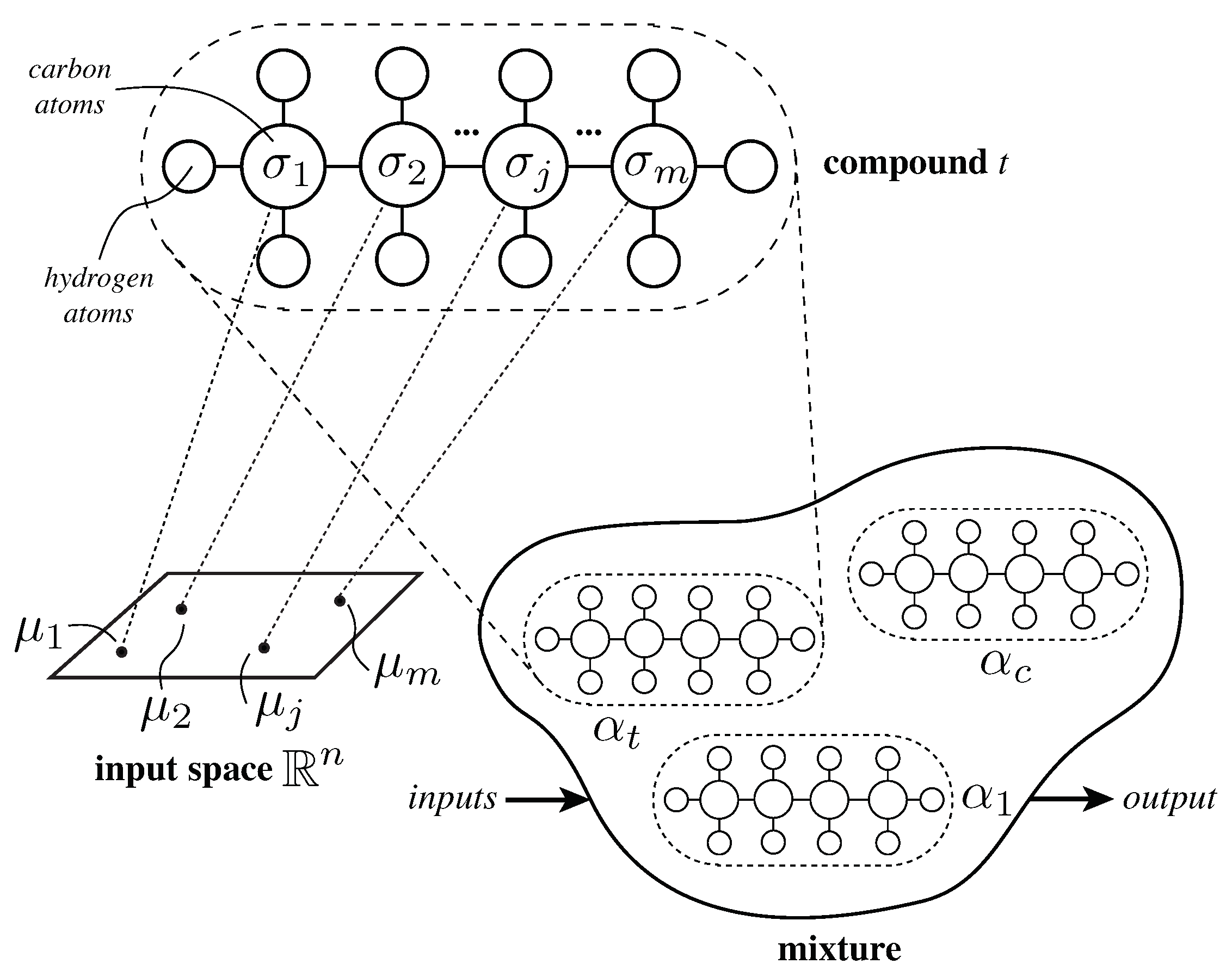
3.2. Artificial Hydrocarbon Networks
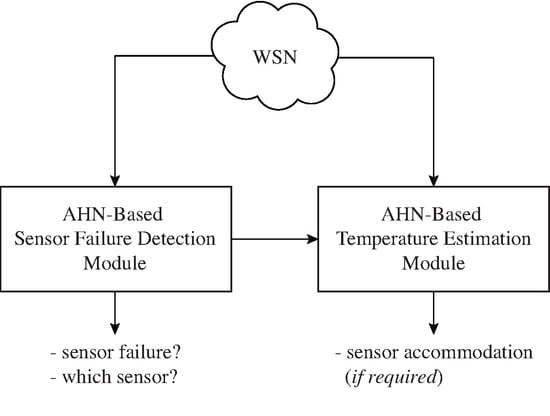
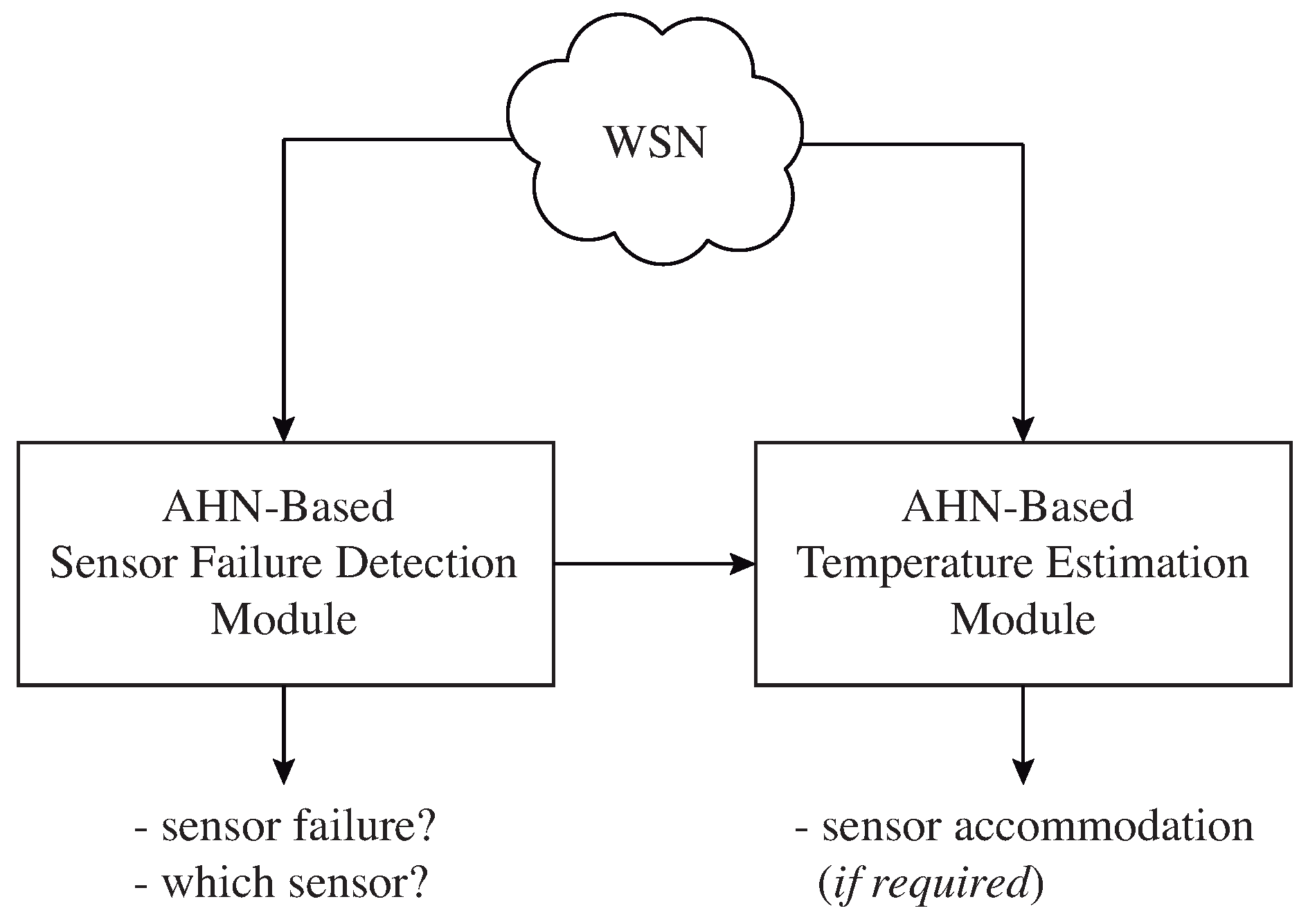
3.3. Temperature Estimation and Sensor Failure Detection Module
| Algorithm 1 Simple AHN training algorithm |
 |
3.3.1. Temperature Estimation Module
3.3.2. Failure Detection Module
3.3.3. Sensor Identification
3.3.4. SFDIA Using AHN
| Algorithm 2 Sensor failure, identification and accommodation strategy using AHN |
 |
4. Applicability of the Proposed SFDIA with AHN
4.1. SFDIA with AHN on Simulated WSN
4.2. SFDIA With AHN on Real WSN
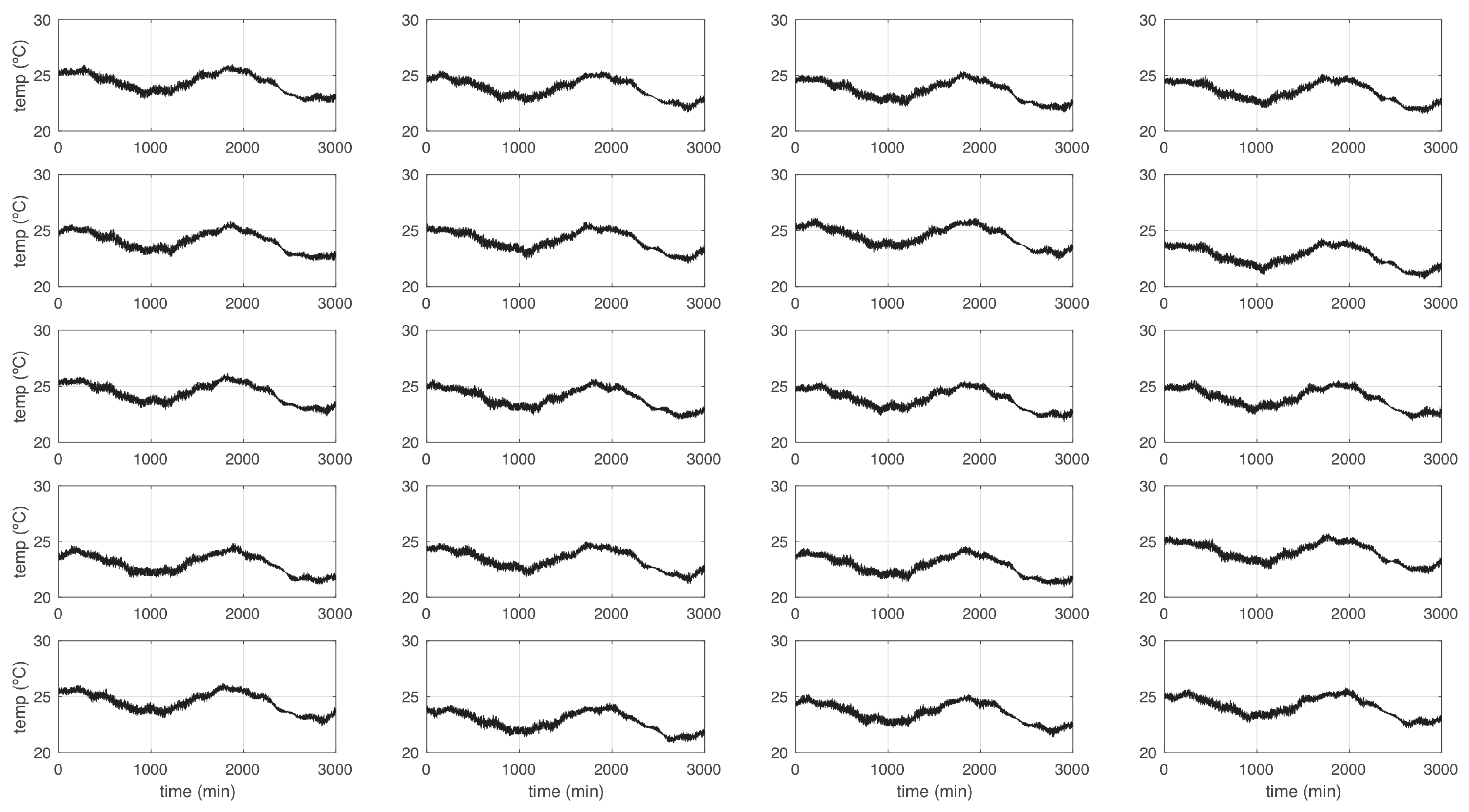
5. Experimental Results and Discussion
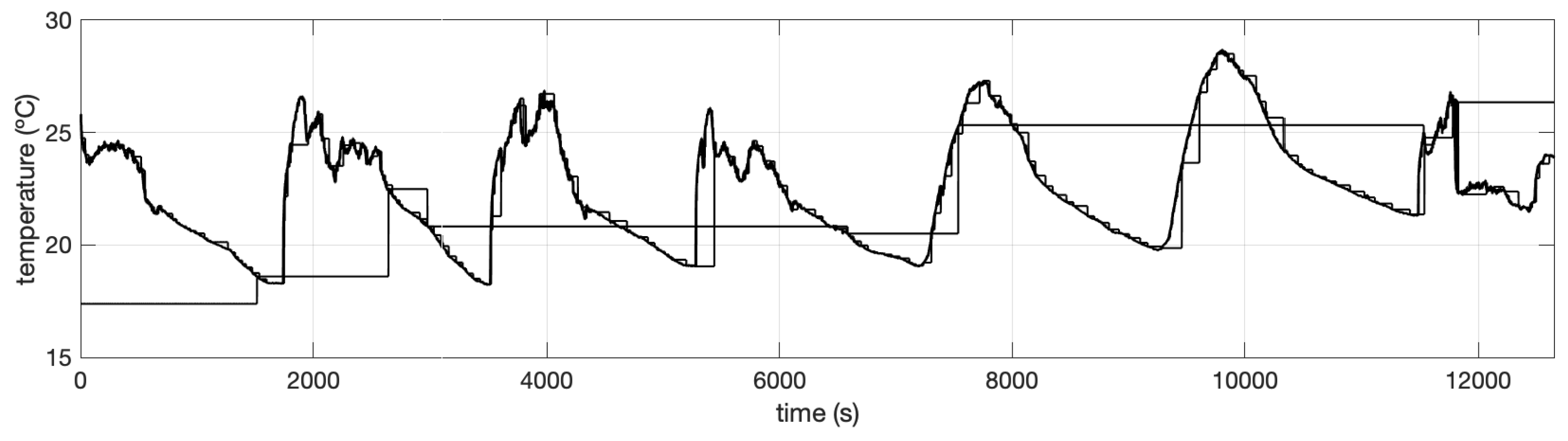
5.1. Training Phase
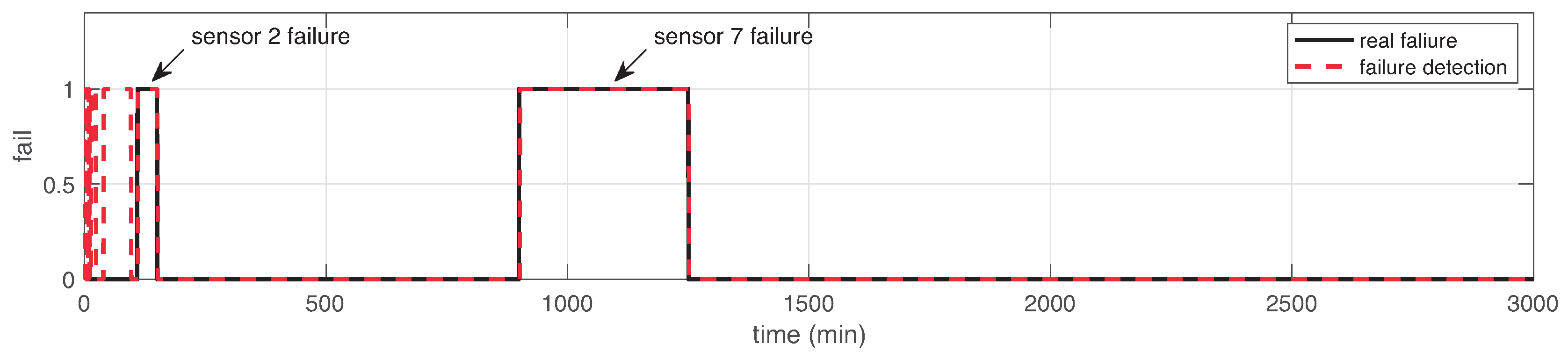
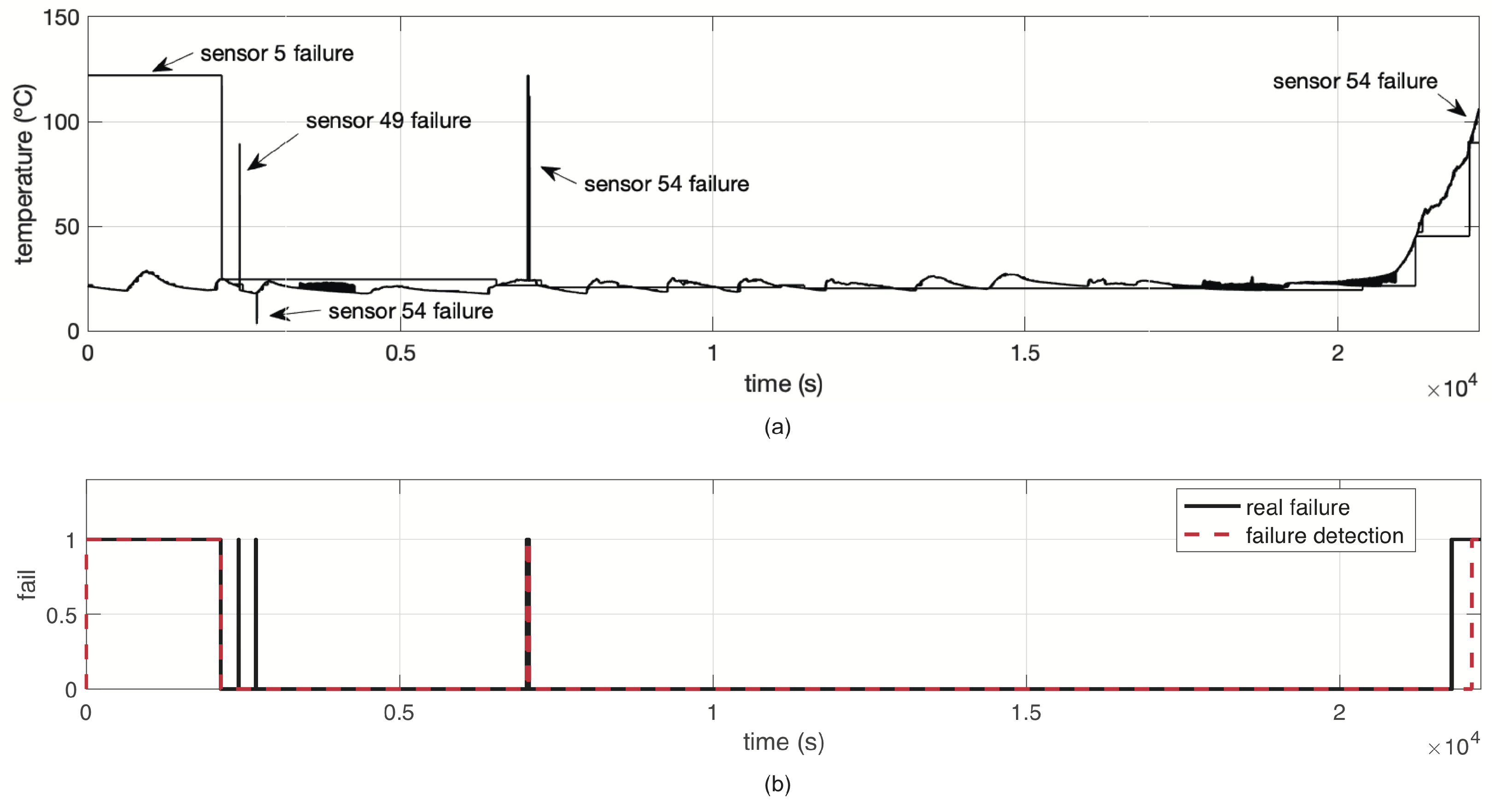
5.2. Failure Detection Phase
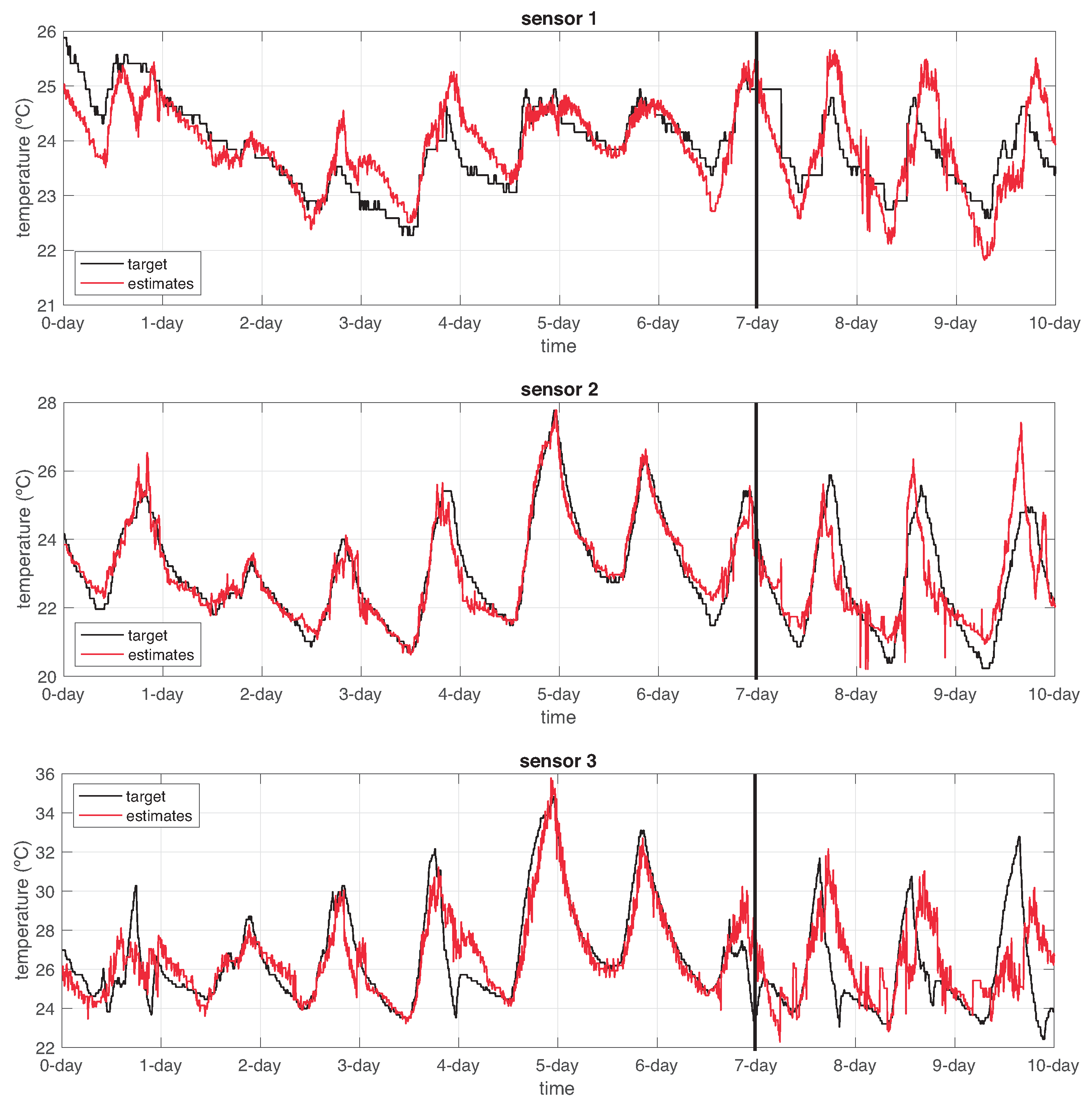
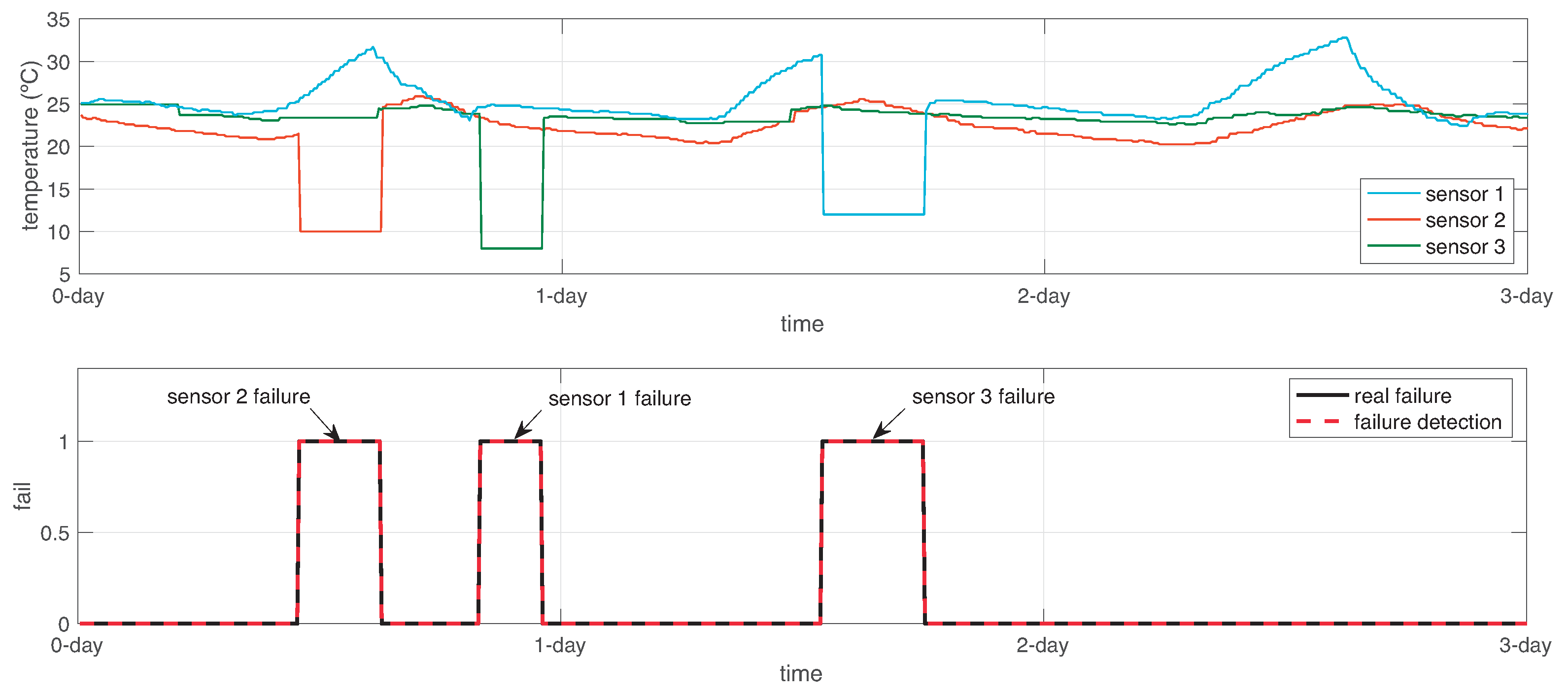
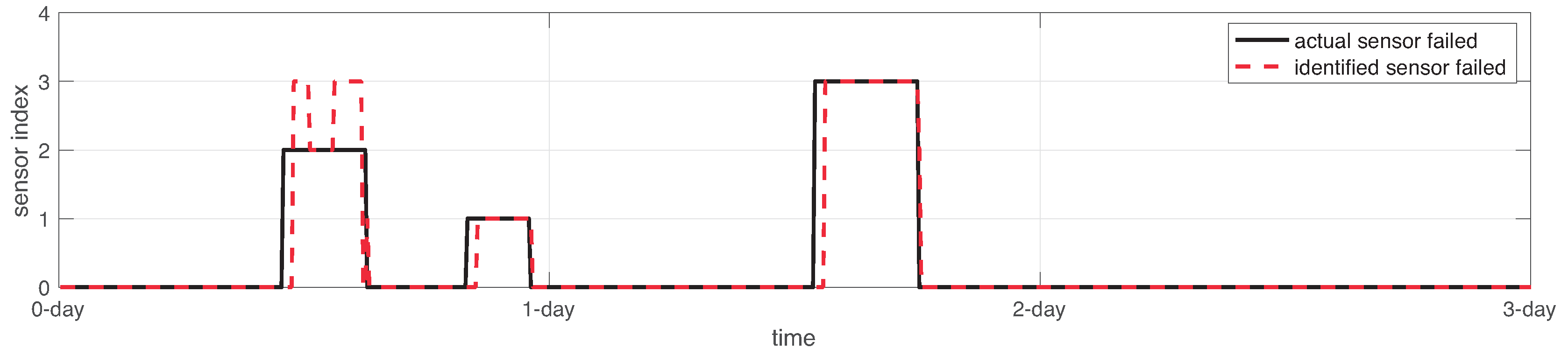
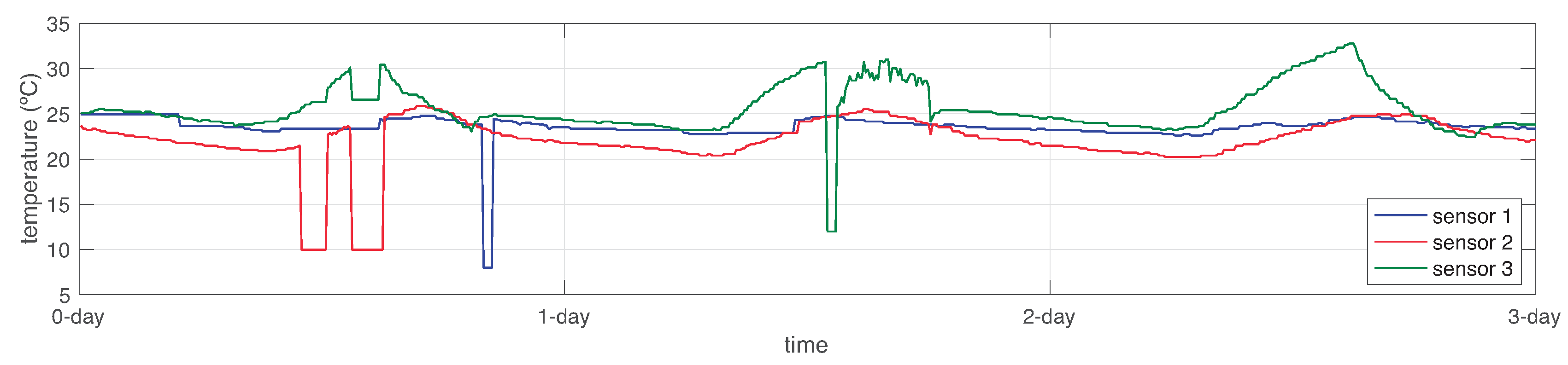
5.3. Sensor Identification and Accommodation Phases
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Denissen, J.; Butalid, L.; Penke, L.; van Aken, M. The Effects of Weather on Daily Mood: A Multilevel Approach. Emotion 2008, 8, 662–667. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Fan, L. Reports the current weather conditions on cell phones using web services. In Proceedings of the 9th IEEE International Conference on Cognitive Informatics, Beijing, China, 7–9 July 2010. [Google Scholar]
- Othman, M.F.; Shazali, K. Wireless sensor network applications: A study in environment monitoring system. Procedia Eng. 2012, 41, 1204–1210. [Google Scholar] [CrossRef]
- Ferdoush, S.; Li, X. Wireless sensor network system design using Raspberry Pi and Arduino for environmental monitoring applications. Procedia Comput. Sci. 2014, 34, 103–110. [Google Scholar] [CrossRef]
- Alavinia, R.; Zhu, Z.; Zhang, S. Design and Simulation of a Meteorological Data Monitoring System Based on a Wireless Sensor. Int. J. Online Eng. 2016, 12, 27. [Google Scholar] [CrossRef]
- Devaraju, J.T.; Suhas, K.R.; Mohana, H.K.; Patil, V.A. Wireless Portable Microcontroller based Weather Monitoring Station. Measurement 2015, 76, 189–200. [Google Scholar] [CrossRef]
- Xiu, D.; Sun, Q.; Ge, C.; Lao, Y.; Du, Y.; Wang, Y.; Shi, Y. Design of Mobile Meteorological Monitor Based on Wireless Sensor Network. Appl. Mech. Mater. 2013, 303–306, 938–944. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; Pellegrini, F.D.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Ray, P.P. A Survey of IoT Cloud Platforms. Future Comput. Inf. J. 2017, 1, 35–46. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Lazarescu, M.T. Design and field test of a WSN platform prototype for long-term environmental monitoring. Sensors 2015, 15, 9481–9518. [Google Scholar] [CrossRef] [PubMed]
- Bijarbooneh, F.H.; Du, W.; Ngai, E.C.H.; Fu, X.; Liu, J. Cloud-Assisted Data Fusion and Sensor Selection for Internet of Things. IEEE Internet Things J. 2016, 3, 257–268. [Google Scholar] [CrossRef]
- Luo, J.; Wu, D.; Pan, C.; Zha, J. Optimal Energy Strategy for Node Selection and Data Relay in WSN-based IoT. Mob. Netw. Appl. 2015, 20, 169–180. [Google Scholar] [CrossRef]
- Guanochanga, B.; Cachipuendo, R.; Fuertes, W.; Salvador, S.; Benitez, D.; Toulkeridis, T.; Torres, J.; Villacis, C.; Tapia, F.; Meneses, F. Real-Time Air Pollution Monitoring Systems Using Wireless Sensor Networks Connected in a Cloud-Computing, Wrapped up Web Services. In Proceedings of the Future Technologies Conference (FTC), Vancouver, BC, Canada, 15–16 November 2018. [Google Scholar]
- Ram, K.S.S.; Gupta, A.N.P.S. IoT based Data Logger System for weather monitoring using Wireless sensor networks. Int. J. Eng. Trends Technol. 2016, 32, 71–75. [Google Scholar] [CrossRef]
- Shah, J.; Mishra, B. IoT enabled environmental monitoring system for smart cities. In Proceedings of the International Conference on Internet of Things and Applications (IOTA), Pune, India, 22–24 January 2016. [Google Scholar]
- Soliman, M.; Abiodun, T.; Hamouda, T.; Zhou, J.; Lung, C.H. Smart home: Integrating internet of things with web services and cloud computing. In Proceedings of the IEEE 5th International Conference on Cloud Computing Technology and Science, Bristol, UK, 2–5 December 2013. [Google Scholar]
- Ponce, H.; Gutierrez, S. An indoor predicting climate conditions approach using Internet-of-Things and artificial hydrocarbon networks. Measurement 2019, 135, 170–179. [Google Scholar] [CrossRef]
- Hussain, S.; Mokhtar, M.; Howe, J.M. Sensor failure detection, identification, and accommodation using fully connected cascade neural network. IEEE Trans. Ind. Electron. 2015, 62, 1683–1692. [Google Scholar] [CrossRef]
- Nagarajan, S.; Kayalvizhi, S.; Karthikeyan, B. Neural network based intelligent sensor fault detection in a three tanks interacting level process. In Proceedings of the International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 2429–2434. [Google Scholar]
- Singh, S.S.; Jinila, Y.B. Sensor node failure detection using check point recovery algorithm. In Proceedings of the International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 8–9 April 2016; pp. 3–6. [Google Scholar]
- Zidi, S.; Moulahi, T.; Alaya, B. Fault detection in wireless sensor networks through SVM classifier. IEEE Sens. J. 2018, 18, 340–347. [Google Scholar] [CrossRef]
- DSA Initiative. Distributed Services Architecture (DSA). Available online: http://iot-dsa.org/ (accessed on 1 October 2018).
- Yahoo. Yahoo Weather API. Available online: https://developer.yahoo.com/weather/ (accessed on 1 October 2018).
- EnOcean Alliance Inc. EnOcean Alliance. Available online: https://www.enocean-alliance.org/ (accessed on 1 October 2018).
- Ploennigs, J.; Ryssel, U.; Kabitzsch, K. Performance analysis of the EnOcean wireless sensor network protocol. In Proceedings of the IEEE 15th Conference on Emerging Technologies & Factory Automation, (ETFA 2010), Bilbao, Spain, 13–16 September 2010. [Google Scholar]
- Lopez-Iturri, P.; Celaya-Echarri, M.; Azpilicueta, L.; Aguirre, E.; Astrain, J.; Villadangos, J.; Falcone, F. Integration of Autonomous Wireless Sensor Networks in Academic School Gardens. Sensors 2018, 18, 3621. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, S.; Song, H.; Lee, H.S. Wireless sensor network design for tactical military applications: Remote large-scale environments. In Proceedings of the MILCOM 2009—2009 IEEE Military Communications Conference, Boston, MA, USA, 18–21 October 2009. [Google Scholar]
- Mahamuni, C.V. A military surveillance system based on wireless sensor networks with extended coverage life. In Proceedings of the Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016. [Google Scholar]
- Madhu, A.; Sreekumar, A. Wireless Sensor Network Security in Military Application Using Unmanned Vehicle. Available online: https://pdfs.semanticscholar.org/e0aa/0e813ccb502c37f03a7b91b477e35336c63d.pdf (accessed on 5 February 2019).
- Lazarescu, M.T. Design of a WSN platform for long-term environmental monitoring for IoT applications. IEEE J. Emerg. Sel. Top. Circuits Syst. 2013, 3, 45–54. [Google Scholar] [CrossRef]
- Cao-hoang, T.; Duy, C.N. Environment monitoring system for agricultural application based on wireless sensor network. In Proceedings of the Seventh International Conference on Information Science and Technology, Da Nang, Vietnam, 16–19 April 2017. [Google Scholar]
- Haque, S.A.; Rahman, M.; Aziz, S.M. Sensor anomaly detection in wireless sensor networks for healthcare. Sensors 2015, 15, 8764–8786. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Liu, T.; Li, G.; Li, T.; Inoue, Y. Wearable sensor systems for infants. Sensors 2015, 15, 3721–3749. [Google Scholar] [CrossRef] [PubMed]
- Magana-Espinoza, P.; Aquino-Santos, R.; Cardenas-Benitez, N.; Aguilar-Velasco, J.; Buenrostro-Segura, C.; Edwards-Block, A.; Medina-Cass, A. Wisph: A wireless sensor network-based home care monitoring system. Sensors 2014, 14, 7096–7119. [Google Scholar] [CrossRef] [PubMed]
- Erol-Kantarci, M.; Mouftah, H.T. Wireless sensor networks for cost-efficient residential energy management in the smart grid. IEEE Trans. Smart Grid 2011, 2, 314–325. [Google Scholar] [CrossRef]
- Li, M.; Lin, H.J. Design and implementation of smart home control systems based on wireless sensor networks and power line communications. IEEE Trans. Ind. Electron. 2015, 62, 4430–4442. [Google Scholar] [CrossRef]
- Suryadevara, N.K.; Mukhopadhyay, S.C. Wireless sensor network based home monitoring system for wellness determination of elderly. IEEE Sens. J. 2012, 12, 1965–1972. [Google Scholar] [CrossRef]
- Ponce, H.; Ponce, P.; Molina, A. Artificial Organic Networks: Artificial Intelligence Based on Carbon Networks; Studies in Computational Intelligence; Springer: New York, NY, USA, 2014. [Google Scholar]
- Ponce, H.; Martínez-Villasenor, L.; Miralles-Pechuán, L. A Novel Wearable Sensor-Based Human Activity Recognition Approach Using Artificial Hydrocarbon Networks. Sensors 2016, 16, 1033. [Google Scholar] [CrossRef] [PubMed]
- Ponce, H.; Ponce, P.; Molina, A. The development of an artificial organic networks toolkit for LabVIEW. J. Comput. Chem. 2015, 36, 478–492. [Google Scholar] [CrossRef]
- Ponce, H.; Ponce, P.; Molina, A. Adaptive noise filtering based on artificial hydrocarbon networks: An application to audio signals. Expert Syst. Appl. 2014, 41, 6512–6523. [Google Scholar] [CrossRef]
- Ponce, H.; Miralles-Pechuán, L.; Martínez-Villasenor, L. A Flexible Approach For Human Activity Recognition Using Artificial Hydrocarbon Networks. Sensors 2016, 16, 1715. [Google Scholar] [CrossRef]
- Ponce, H.; Martínez-Villasenor, L. Interpretability of Artificial Hydrocarbon Networks for Breast Cancer Classification. In Proceedings of the 30th International Joint Conference on Neural Networks, Anchorage, AK, USA, 14–19 May 2017. [Google Scholar]
- Ponce, H.; Ponce, P. Artificial Organic Networks. In Proceedings of the Electronics, Robotics and Automotive Mechanics Conference (CERMA), Cuernavaca, Morelos, Mexico, 15–18 November 2011. [Google Scholar] [CrossRef]
- Bodik, P.; Hong, W.; Guestrin, C.; Madden, S.; Paskin, M.; Thibaux, R. Intel Lab Data. Available online: http://db.csail.mit.edu/labdata/labdata.html (accessed on 25 January 2019).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Accuracy (%) |
|---|---|
| 20 | 92.13 |
| 50 | 88.09 |
| 100 | 88.03 |
| Temperature Sensor Model | RMSE (C) in Training | RMSE (C) in Testing |
|---|---|---|
| 0.4482 | 0.6986 | |
| 0.4042 | 0.9739 | |
| 1.1986 | 2.7036 |
| Dynamic Function Model | RMSE (C) in Training | RMSE (C) in Testing |
|---|---|---|
| (0.0196,0.0579,0.0403) | (0.0307,0.0838,0.1042) | |
| (0.0087,0.0583,0.0404) | (0.0187,0.0824,0.1045) | |
| (0.0097,0.0213,0.0352) | (0.0161,0.0225,0.0846) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutiérrez, S.; Ponce, H. An Intelligent Failure Detection on a Wireless Sensor Network for Indoor Climate Conditions. Sensors 2019, 19, 854. https://doi.org/10.3390/s19040854
Gutiérrez S, Ponce H. An Intelligent Failure Detection on a Wireless Sensor Network for Indoor Climate Conditions. Sensors. 2019; 19(4):854. https://doi.org/10.3390/s19040854
Chicago/Turabian StyleGutiérrez, Sebastián, and Hiram Ponce. 2019. "An Intelligent Failure Detection on a Wireless Sensor Network for Indoor Climate Conditions" Sensors 19, no. 4: 854. https://doi.org/10.3390/s19040854
APA StyleGutiérrez, S., & Ponce, H. (2019). An Intelligent Failure Detection on a Wireless Sensor Network for Indoor Climate Conditions. Sensors, 19(4), 854. https://doi.org/10.3390/s19040854