Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders


Abstract
1. Introduction
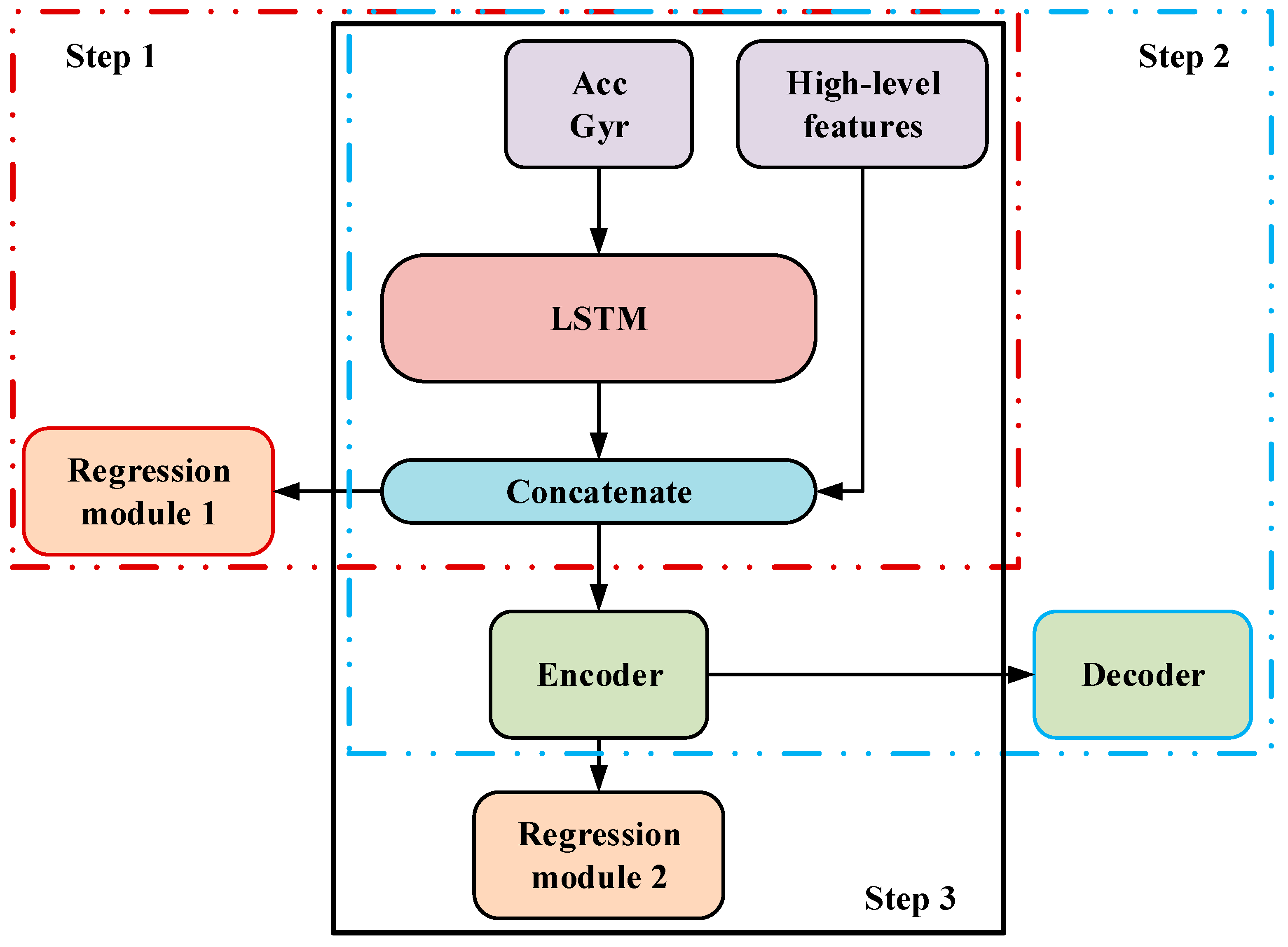
- We propose a training frame for combining LSTM and DAE to deal with sequential data to extract the temporal feature meanwhile denoise, and a stride-length estimation model based on the training frame. Since the inertial-sensor measurements are time series data, we leveraged LSTM to excavate the temporal dependencies and extract significant features vectors from noisy inertial-sensor measurements. Denoising Autoencoders were adopted to automatically sanitize the inherent noise and obtain denoised feature vectors. A regression module was employed to map the denoised feature vectors to the resulting stride length.
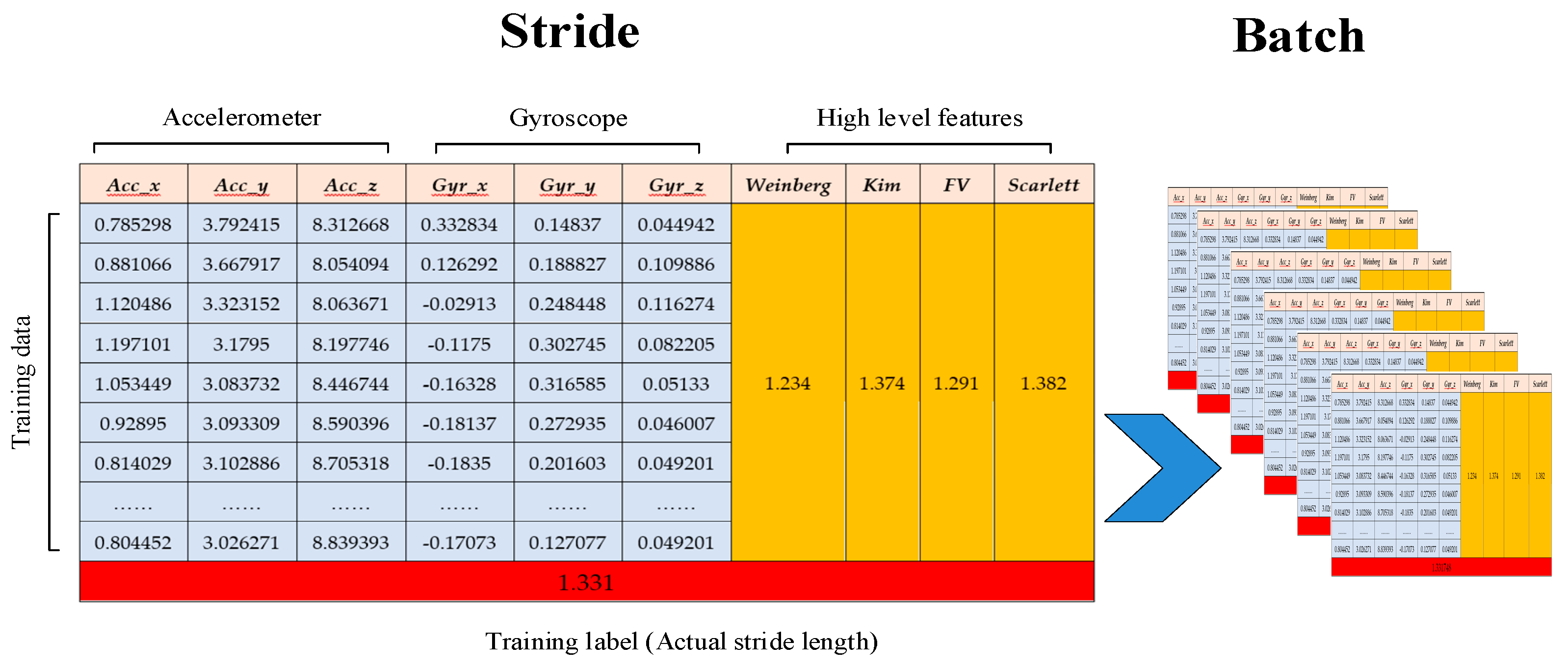
- We trained the proposed model with walking information from a smartphone, and the ground truth of stride-length from a foot-mounted IMU module, to predict an adaptive stride-length. In addition to the raw inertial-sensor data, the high-level stride-length features based on the excellent early studies are directly fed to the merge layer of networks. The proposed method is free of the zero-velocity assumption that double-integration methods need to reinitialize the integration process and eliminate accumulative errors.
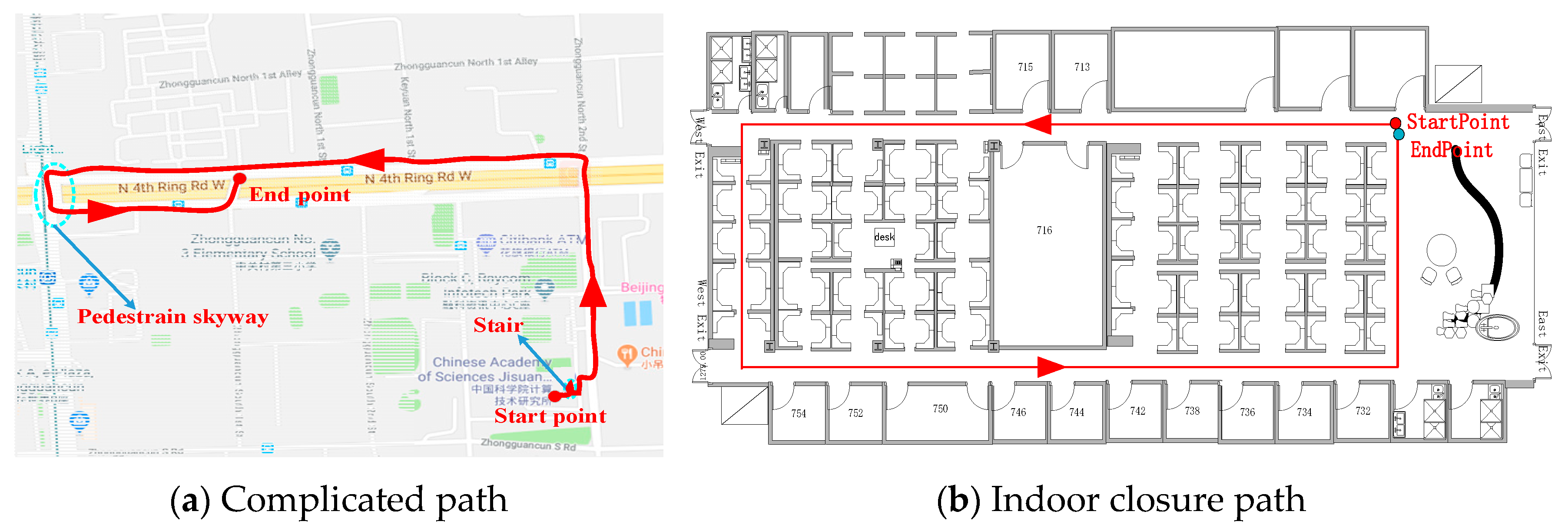
- In addition to evaluate the robustness performance of the proposed TapeLine under different operation conditions, we compared TapeLine with the existing commonly-used stride-length estimation methods in both single-stride and complex paths. Whether stride-length estimation or walking-distance estimation in complex environments with natural walking patterns, our proposed method outperformed commonly-used stride-length estimation methods and achieved a superior performance, with a stride-length error rate of 4.63% and a walking-distance error rate of 1.43%.
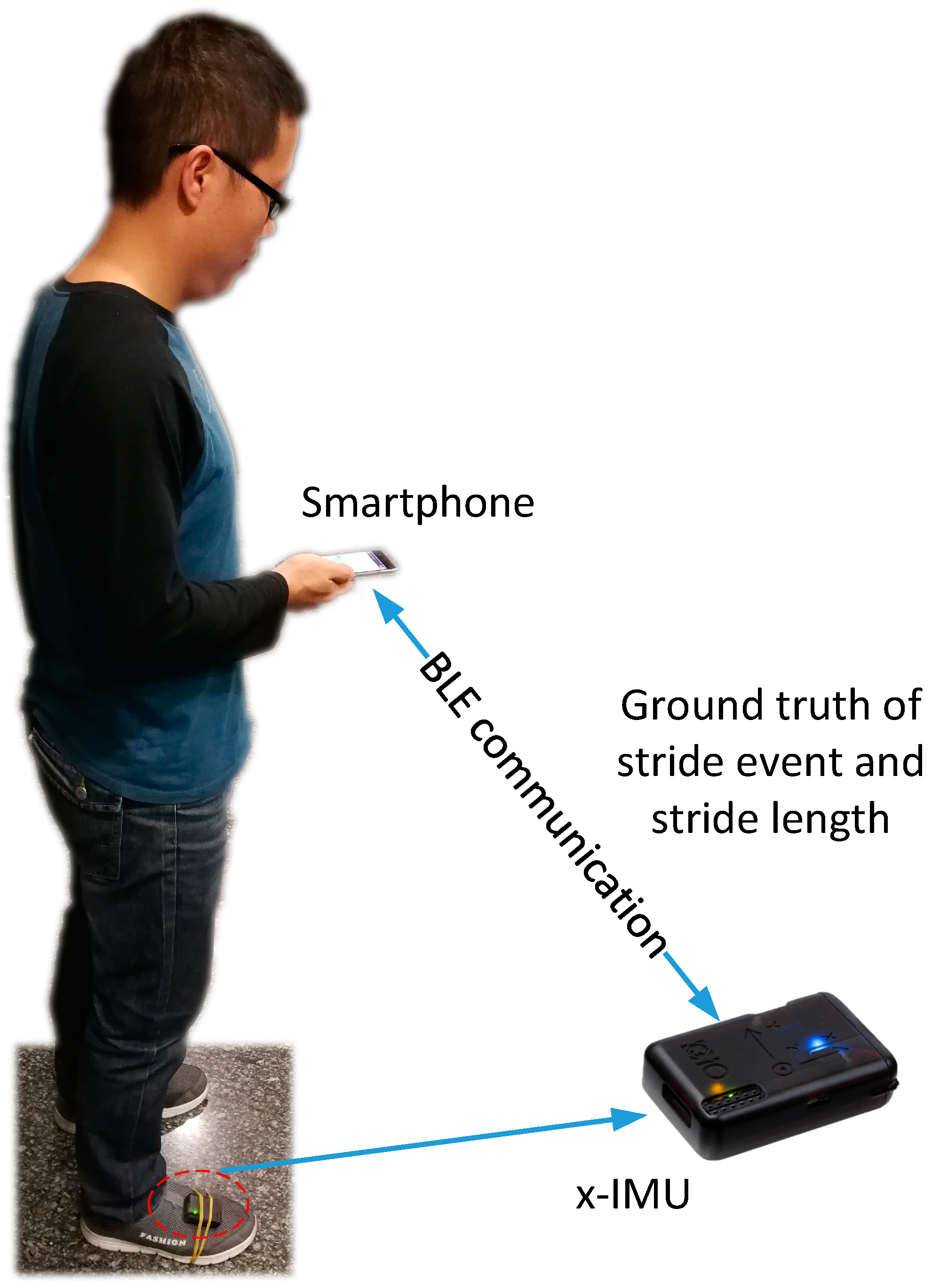
- We established a benchmark dataset with ground truth for training step counting and stride-length estimation. A foot-mounted IMU module (x-IMU [49] controls motion distance errors in 0.3% of the entire travel distance) was attached to a pedestrian’s shoes that provided precise heel strike times and actual stride-length. Training data was generated from smartphone, and the annotated data were generated by a foot-mounted IMU module. In addition to model training and performance evaluation of step counting and stride-length estimation, the dataset is applied to explore the optimal parameters.
2. Materials and Methods
2.1. System Architecture
2.2. Benchmark Dataset
2.3. Data Preprocessing and High-Level Feature Extraction
2.4. Stride-Length Estimation Model
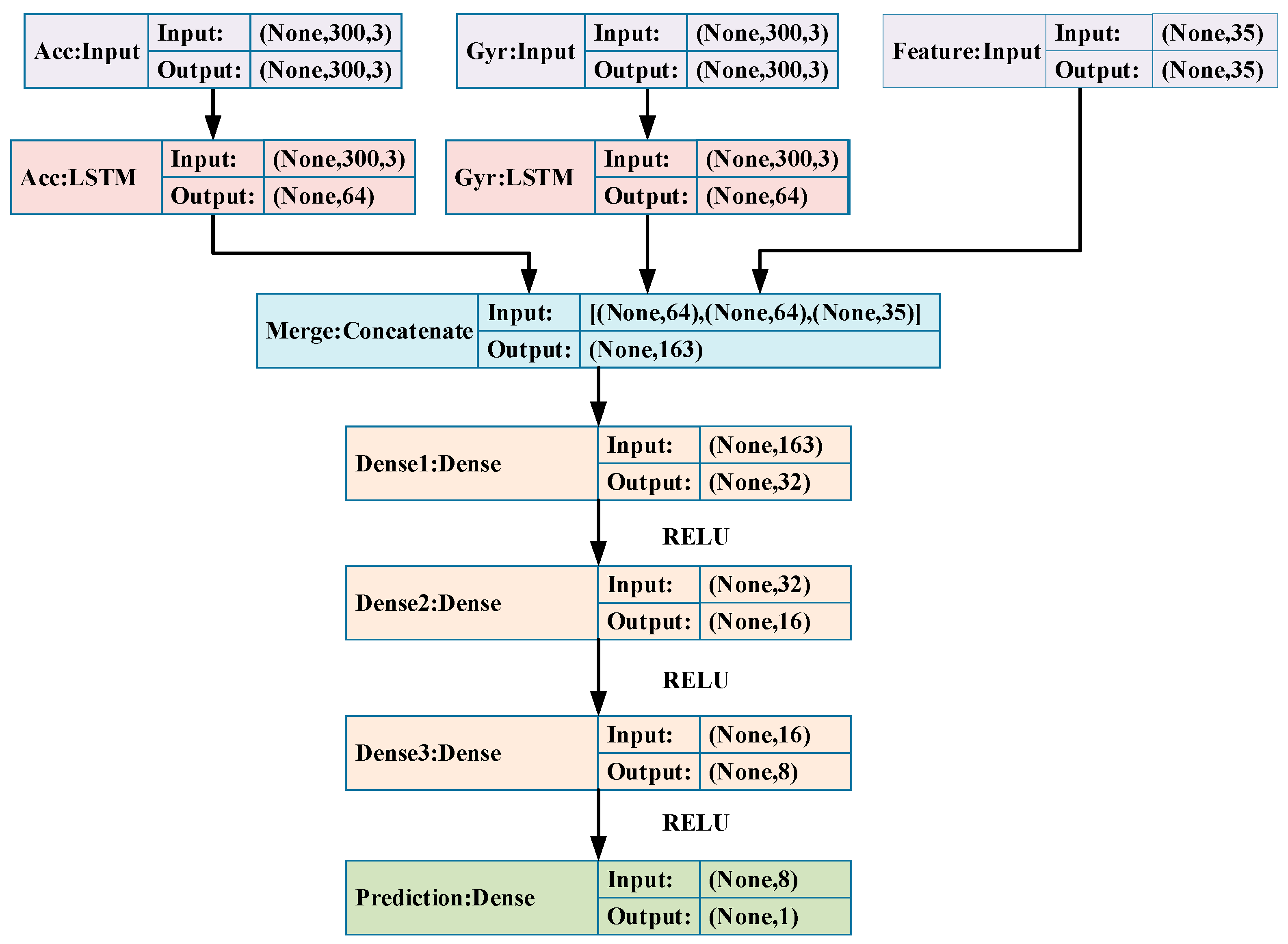
2.4.1. Temporal Feature Extraction based on Long Short-Term Memory
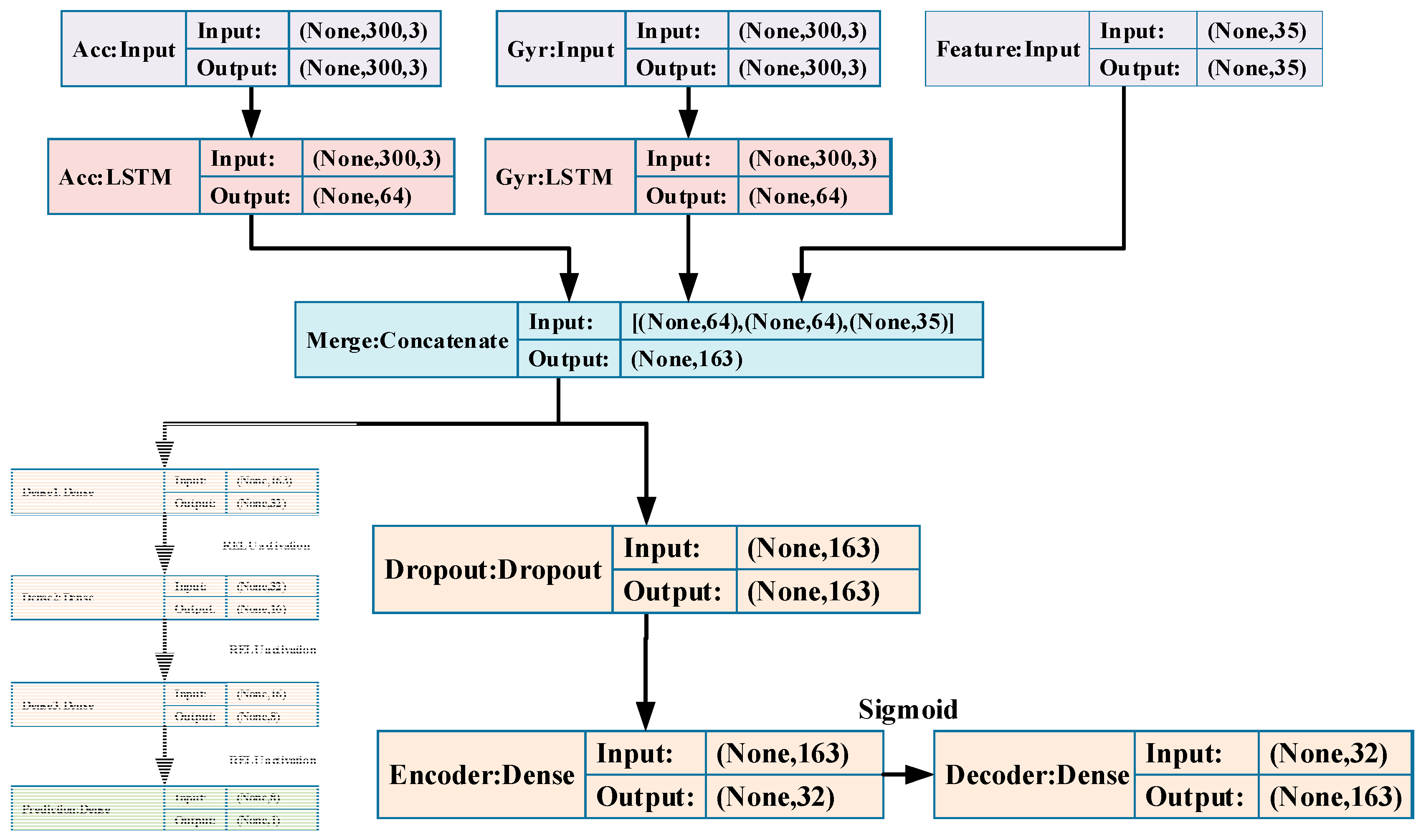
2.4.2. Noise sanitization based on Denoising Autoencoders
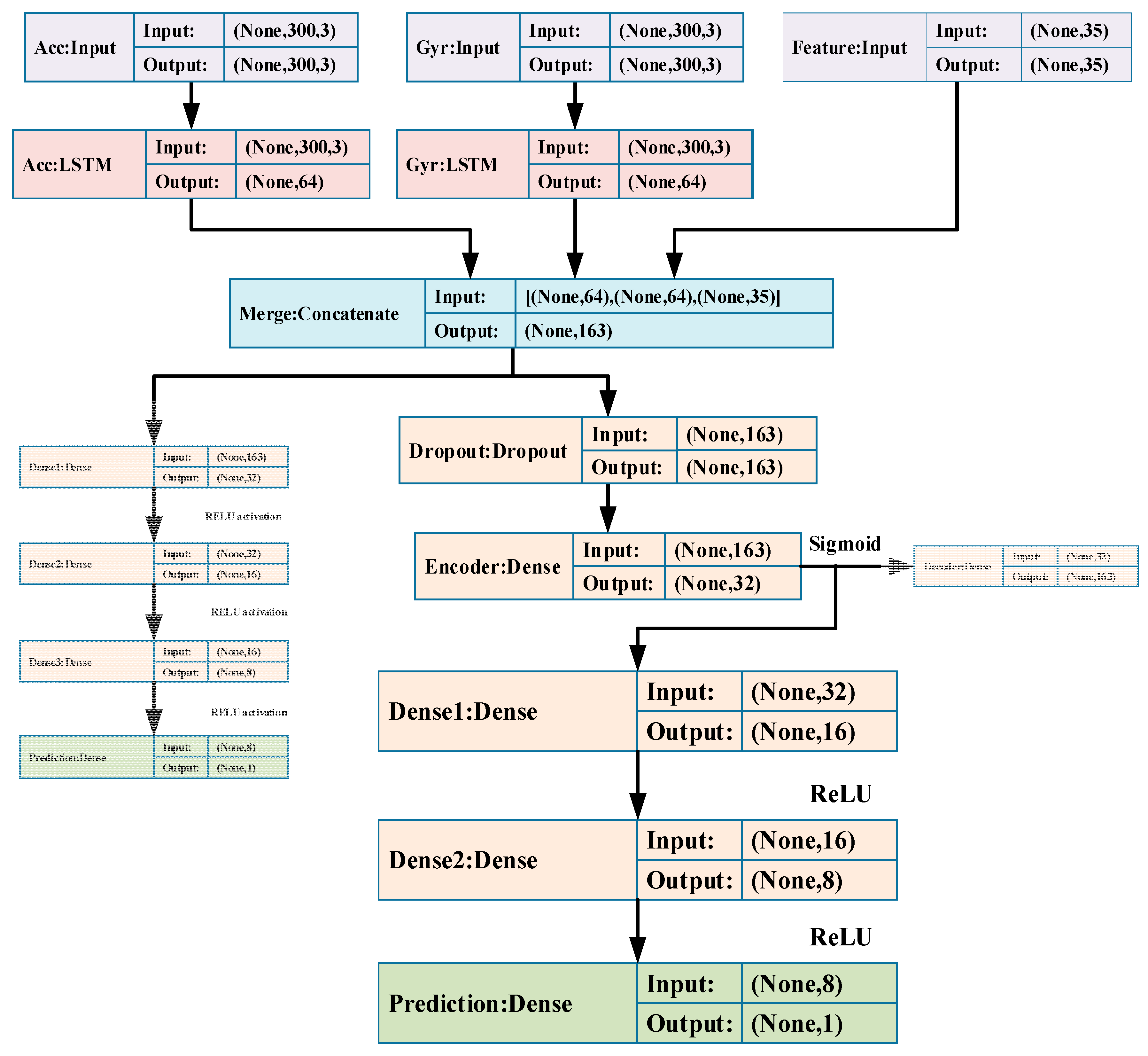
2.4.3. Stride-Length Regression
| Algorithm 1. adaptive stride-length estimation based on LSTM-DAE | |
| 1 | Input: training data with actual stride-length , test data without actual stride-length |
| 2 | Output: stride-length estimation of pedestrian |
| 3 | // Data preprocessing |
| 4 | Split the inertial sensor data according to the stride event. |
| 5 | For each stride do |
| 6 | Extract sensor data and corresponding ground truth to generate the training data and labels |
| 7 | Extract high-level feature |
| 8 | Infinity-pad or intercept the sensor samples of per stride to a fixed length |
| 9 | Construct Stride data as shown in Figure 5 |
| 10 | End for |
| 11 | // Model training |
| 12 | build and train the pure LSTM model |
| 13 | build the DAE model and initialize the weights of LSTM layers by the pure LSTM model, set the LSTM layers to be untrainable and train DAE model |
| 14 | build the final regression model and initialize the weights of layers before Decoder, set all layers to be trainable and train to fine-tune |
| 15 | //Testing |
| 16 | Leverage trained model to predict stride-length of pedestrian |
2.5. Parameter Set and Network Performance
2.6. Walking-Distance Estimation
2.7. Evaluation Metrics
3. Experimentation and Evaluation
3.1. Experimental Setup
3.2. Experiment Results of Stride-Length Estimation
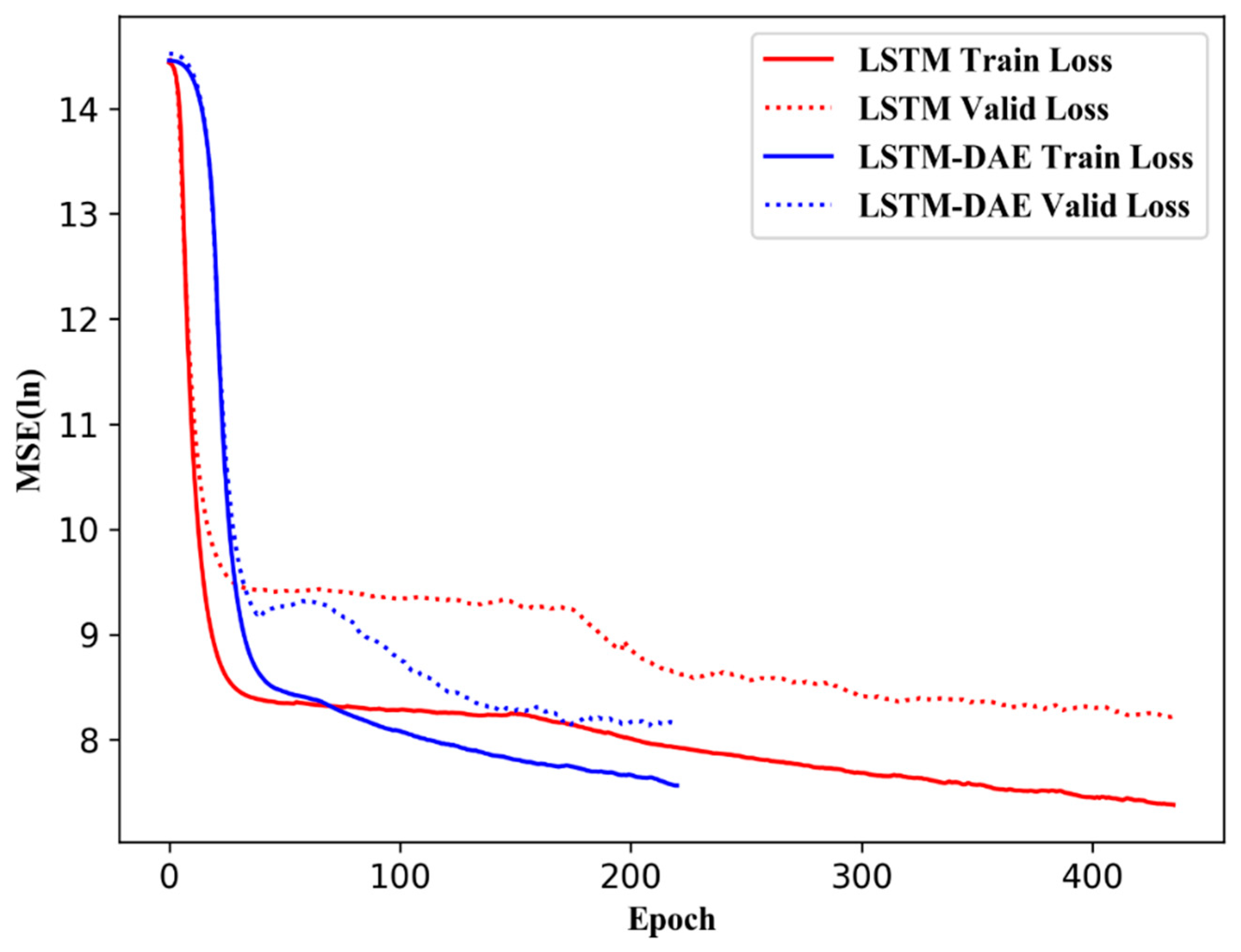
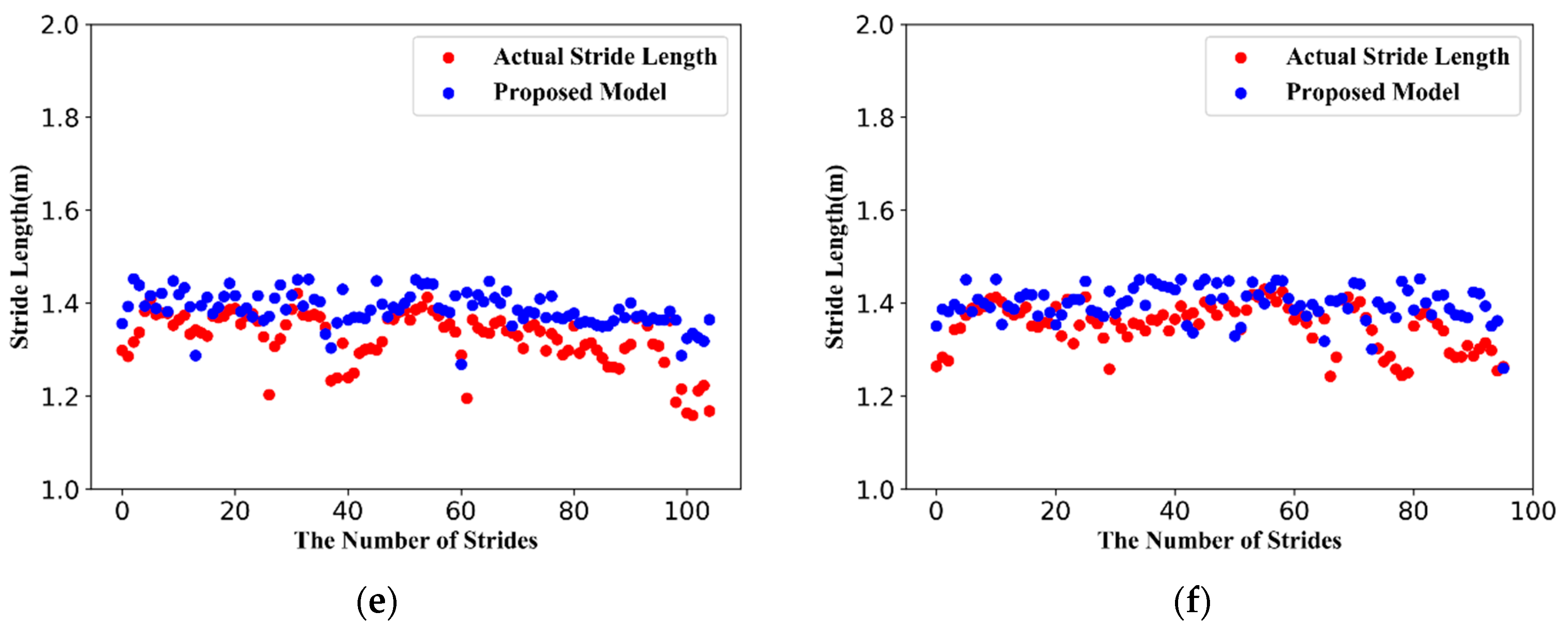
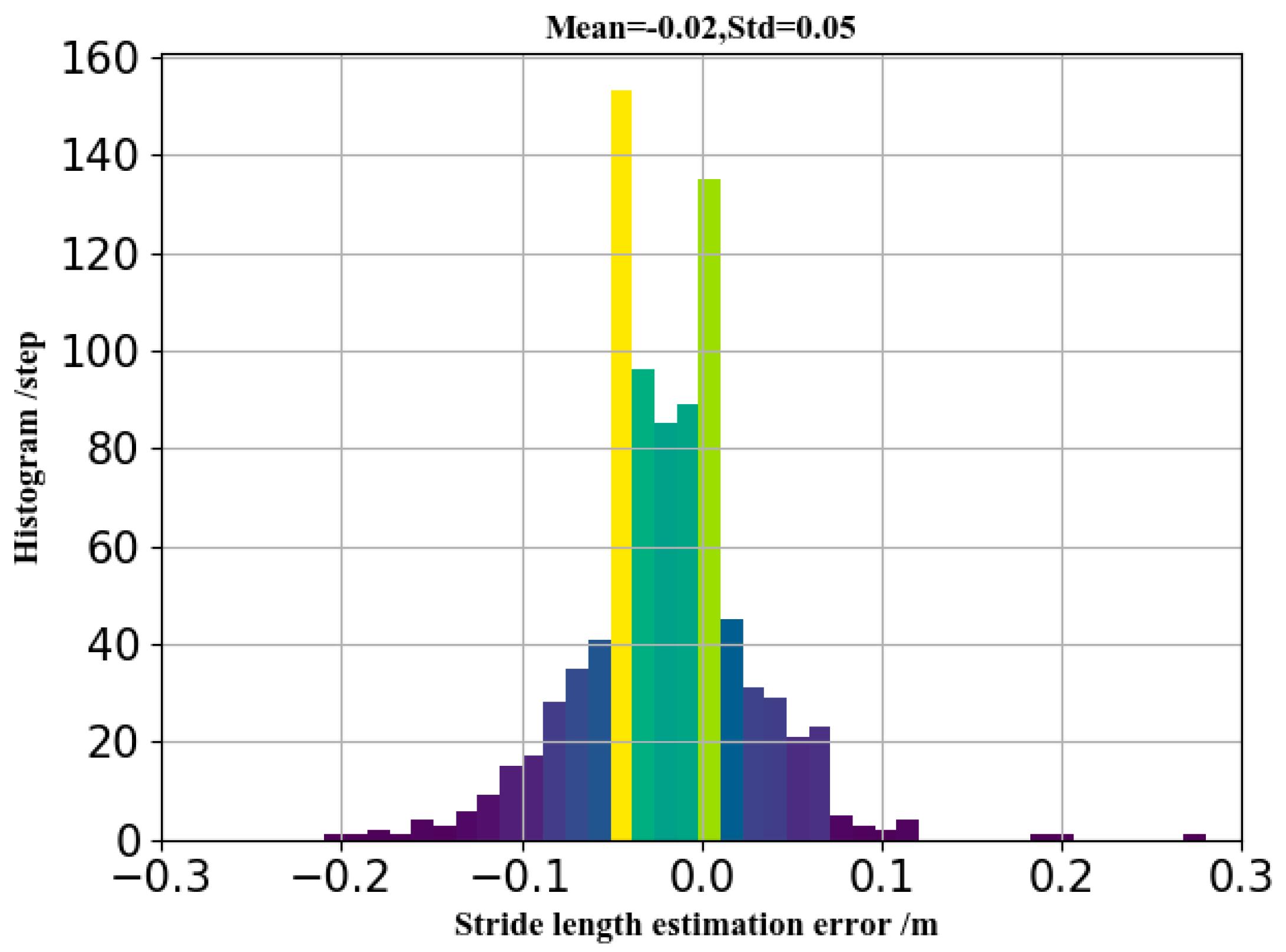
3.2.1. Comparison of Stride-Length Estimation using LSTM and LSTM-DAE
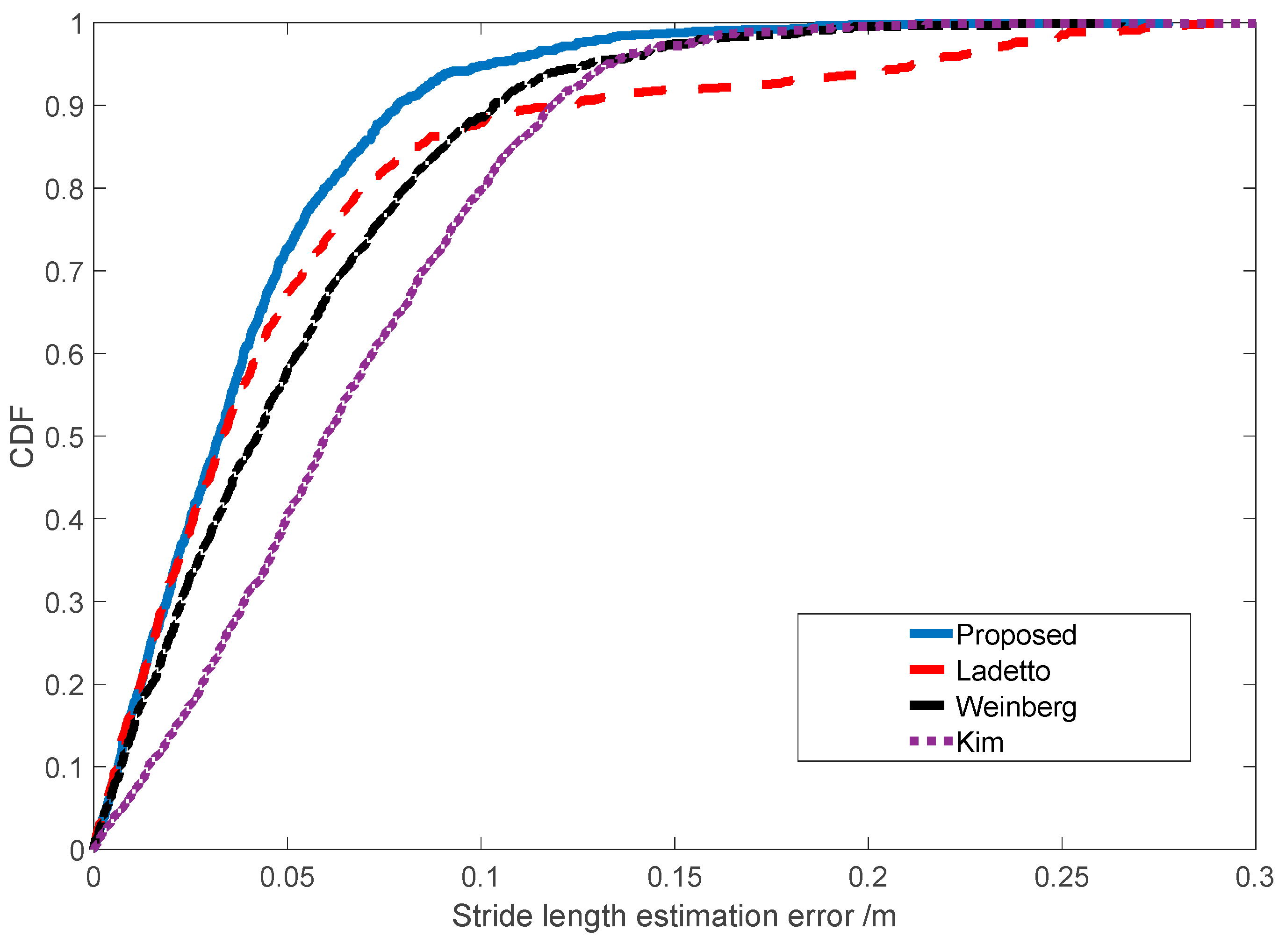
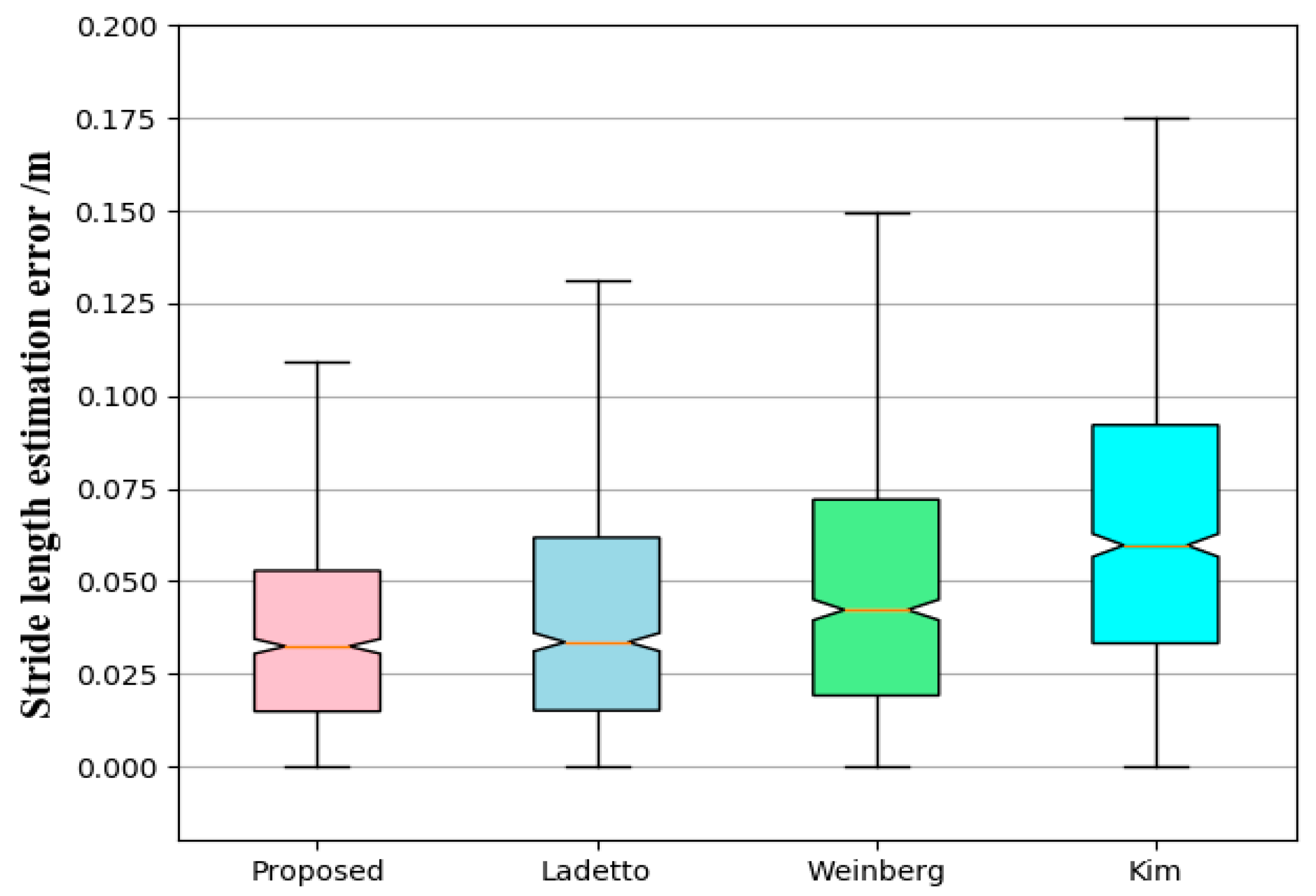
3.2.2. Comparison with Other Methods
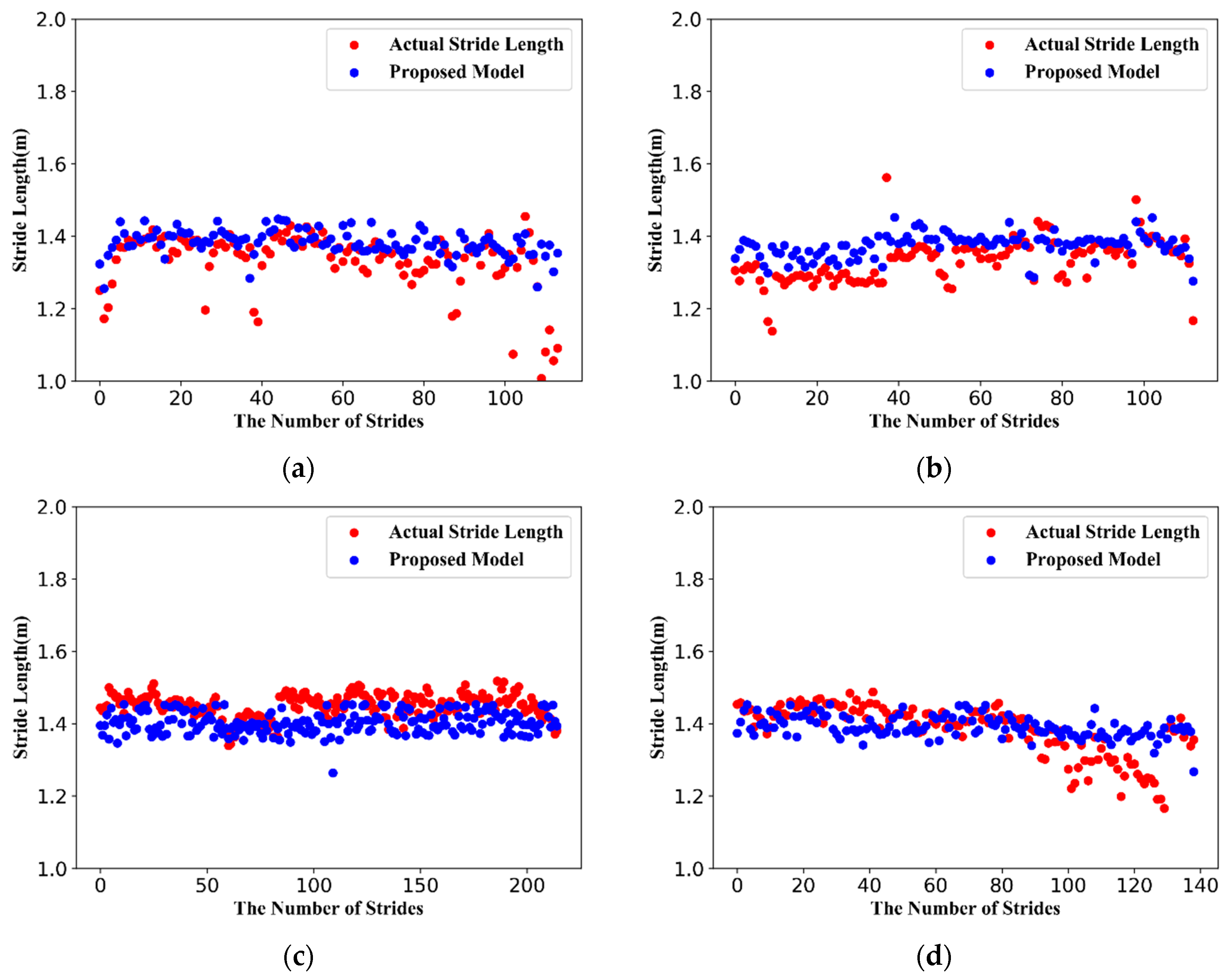
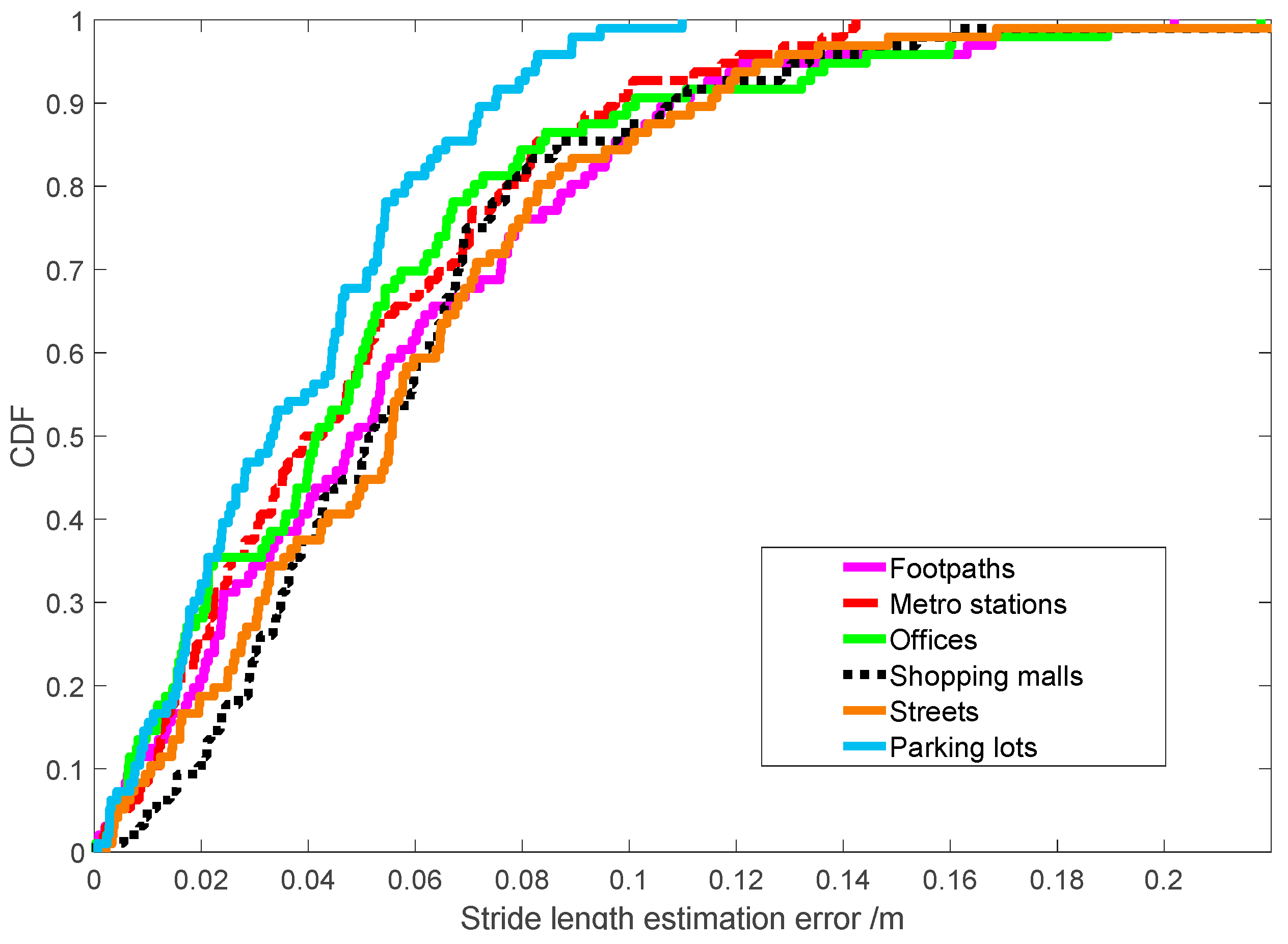
3.2.3. Robustness among Typical Scenarios
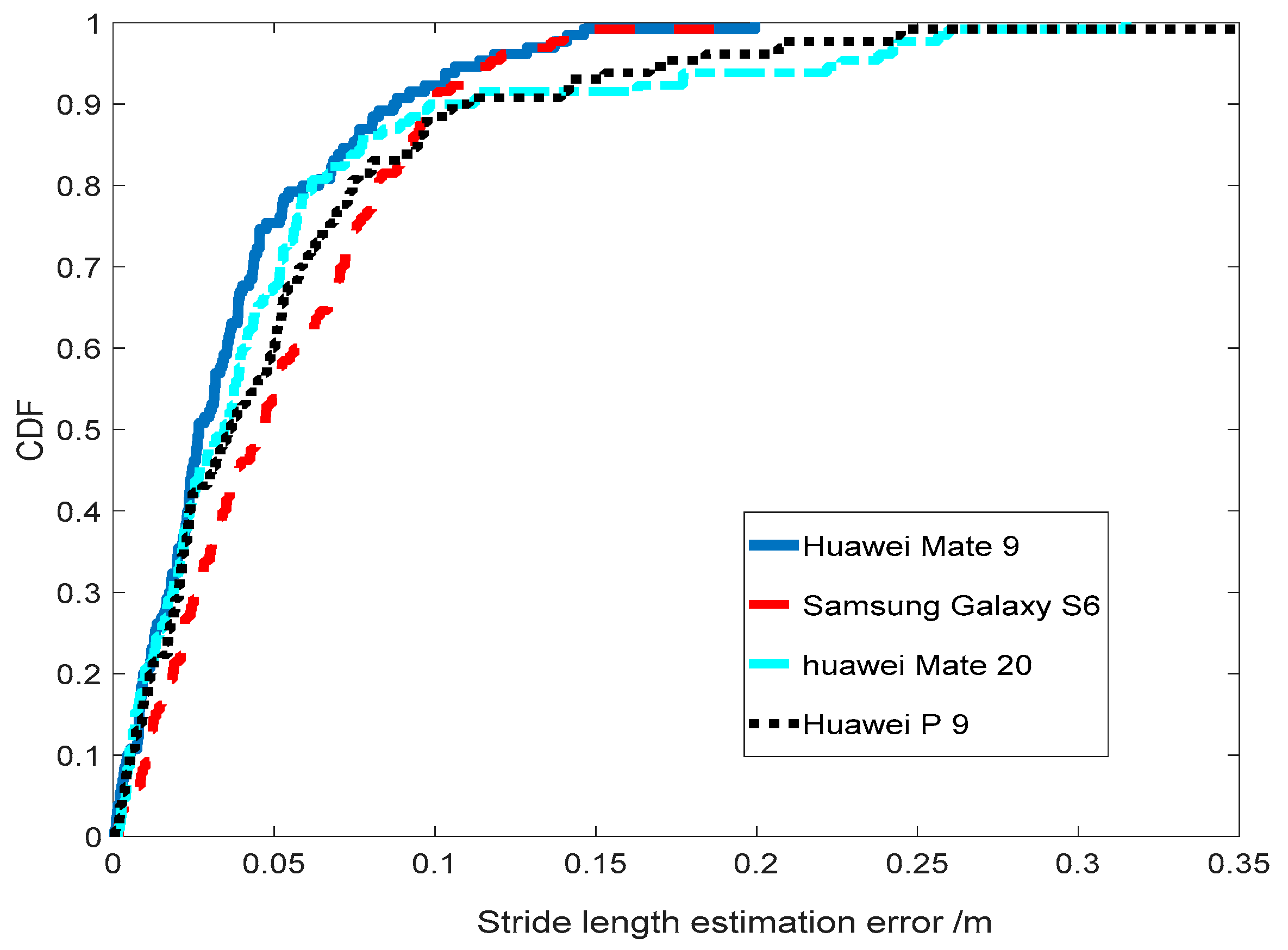
3.2.4. Robustness among Heterogeneous Devices
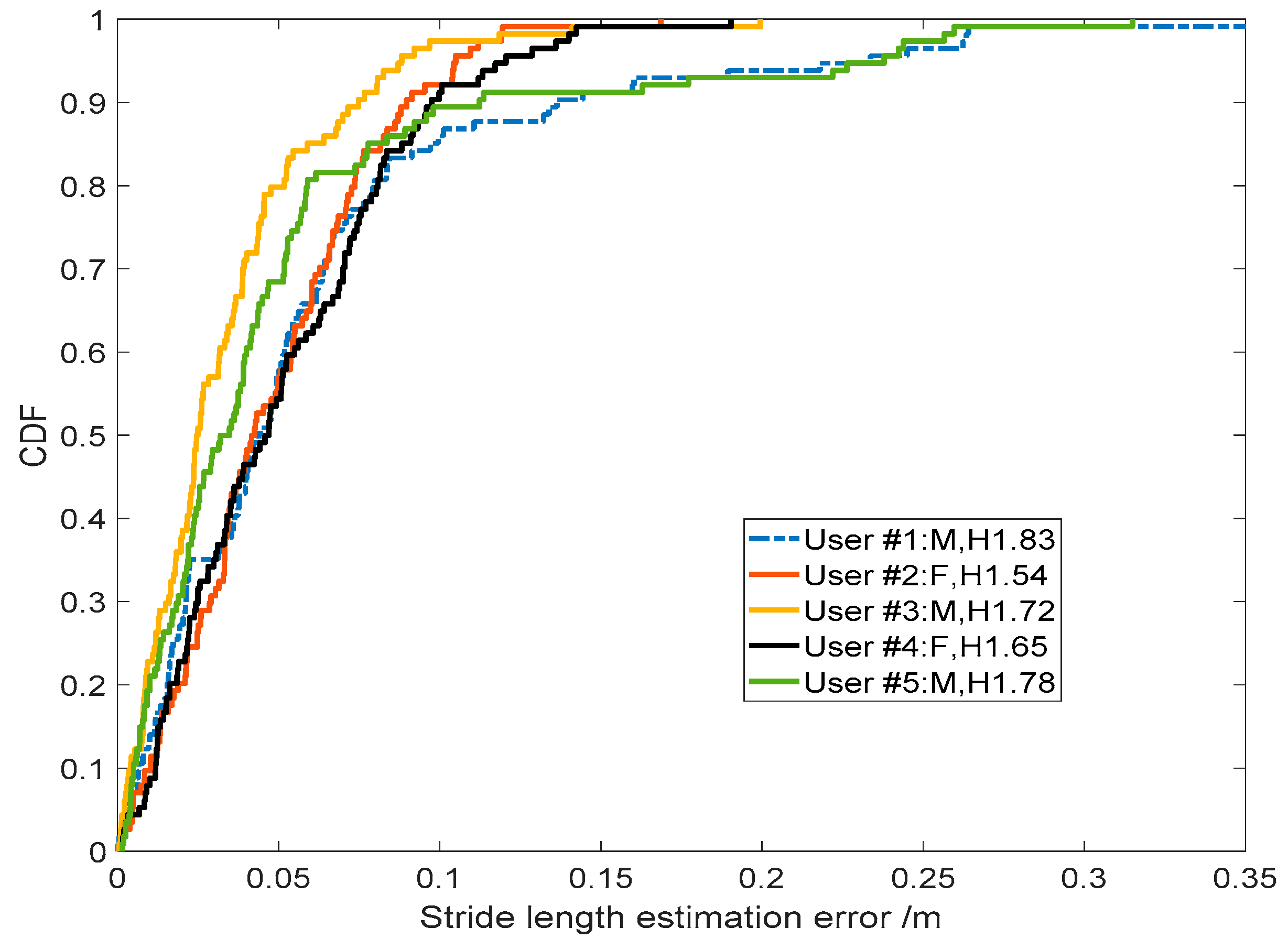
3.2.5. Robustness among Different Pedestrians
3.3. Walking-Distance Estimation in Complex Paths
3.4. Time Complexity Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic WiFi Sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Indoor Location Market Worth 40.99 Billion USD by 2022. Available online: https://www.marketsand markets.com/PressReleases/indoor-location.asp (accessed on 1 December 2018).
- Jimenez Ruiz, A.R.; Seco Granja, F.; Prieto Honorato, J.C.; Guevara Rosas, J.I. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. Markov Localization for Mobile Robots in Dynamic Environments. J. Artif. Intell. Res. 1999, 11, 391–427. [Google Scholar] [CrossRef]
- Liu, H.-H.; Liu, C. Implementation of Wi-Fi Signal Sampling on an Android Smartphone for Indoor Positioning Systems. Sensors 2017, 18, 3. [Google Scholar] [CrossRef] [PubMed]
- Tiemann, J.; Pillmann, J.; Wietfeld, C. Ultra-Wideband Antenna-Induced Error Prediction Using Deep Learning on Channel Response Data. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Yohan, A.; Lo, N.-W.; Winata, D. An Indoor Positioning-Based Mobile Payment System Using Bluetooth Low Energy Technology. Sensors 2018, 18, 974. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Zhao, F.; Shao, W. An indoor self-localization algorithm using the calibration of the online magnetic fingerprints and indoor landmarks. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Shao, W.; Zhao, F.; Wang, C.; Luo, H.; Muhammad Zahid, T.; Wang, Q.; Li, D. Location Fingerprint Extraction for Magnetic Field Magnitude Based Indoor Positioning. J. Sens. 2016, 2016, 1–16. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A Reliability-Augmented Particle Filter for Magnetic Fingerprinting Based Indoor Localization on Smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Men, A.; Zhao, F.; Huang, Y. An Infrastructure-Free Indoor Localization Algorithm for Smartphones. Sensors 2018, 18, 3317. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Men, A.; Zhao, F.; Gao, X.; Wei, J.; Zhang, Y.; Huang, Y. Light positioning: A high-accuracy visible light indoor positioning system based on attitude identification and propagation model. Int. J. Distrib. Sens. Networks 2018, 14, 155014771875826. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, X.; Li, Q.; Fang, Z. A Visual-Based Approach for Indoor Radio Map Construction Using Smartphones. Sensors 2017, 17, 1790. [Google Scholar] [CrossRef] [PubMed]
- Kuang, J.; Niu, X.; Chen, X. Robust Pedestrian Dead Reckoning Based on MEMS-IMU for Smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef] [PubMed]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Rajagopal, S. Personal Dead Reckoning System with Shoe Mounted Inertial Sensors. Master’s Thesis, Royal Institute of Technology, Stockholm, Sweden, 2008. [Google Scholar]
- Zampella, F.; Khider, M.; Robertson, P.; Jimenez, A. Unscented Kalman filter and Magnetic Angular Rate Update (MARU) for an improved Pedestrian Dead-Reckoning. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 129–139. [Google Scholar]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted Pedestrian Navigation based on Particle Filter with an Adaptive Weight Updating Strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Del Din, S.; Hickey, A.; Ladha, C.; Stuart, S.; Bourke, A.K.; Esser, P.; Rochester, L.; Godfrey, A. Instrumented gait assessment with a single wearable: An introductory tutorial. F1000Research 2016, 5, 2323. [Google Scholar] [CrossRef]
- Yadav, N.; Bleakley, C. Accurate Orientation Estimation Using AHRS under Conditions of Magnetic Distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Lovell, N.H.; Redmond, S.J. Quaternion-Based Complementary Filter for Attitude Determination of a Smartphone. IEEE Sens. J. 2016, 16, 6008–6017. [Google Scholar] [CrossRef]
- Qian, J.; Ma, J.; Ying, R.; Liu, P.; Pei, L. An improved indoor localization method using smartphone inertial sensors. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Goyal, P.; Ribeiro, V.J.; Saran, H.; Kumar, A. Strap-down Pedestrian Dead-Reckoning system. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012. [Google Scholar]
- Shao, W.; Luo, H.; Zhao, F.; Wang, C.; Crivello, A.; Tunio, M.Z. DePedo: Anti Periodic Negative-Step Movement Pedometer with Deep Convolutional Neural Networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Beauchet, O.; Allali, G.; Sekhon, H.; Verghese, J.; Guilain, S.; Steinmetz, J.-P.; Kressig, R.W.; Barden, J.M.; Szturm, T.; Launay, C.P.; et al. Guidelines for Assessment of Gait and Reference Values for Spatiotemporal Gait Parameters in Older Adults: The Biomathics and Canadian Gait Consortiums Initiative. Front. Hum. Neurosci. 2017, 11, 353. [Google Scholar] [CrossRef] [PubMed]
- Edel, M.; Koppe, E. An advanced method for pedestrian dead reckoning using BLSTM-RNNs. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–6. [Google Scholar]
- Diez, L.E.; Bahillo, A.; Otegui, J.; Otim, T. Step Length Estimation Methods Based on Inertial Sensors: A Review. IEEE Sens. J. 2018, 18, 6908–6926. [Google Scholar] [CrossRef]
- Kourogi, M.; Kurata, T. A wearable augmented reality system with personal positioning based on walking locomotion analysis. In Proceedings of the Second IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR ’03), Tokyo, Japan, 7–10 October 2003; IEEE Computer Society: Washington, DC, USA, 2003; pp. 342–343. [Google Scholar]
- Kang, J.; Lee, J.; Eom, D.-S. Smartphone-Based Traveled Distance Estimation Using Individual Walking Patterns for Indoor Localization. Sensors 2018, 18, 3149. [Google Scholar] [CrossRef] [PubMed]
- Combettes, C.; Renaudin, V. Comparison of misalignment estimation techniques between handheld device and walking directions. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–8. [Google Scholar]
- Ho, N.-H.; Truong, P.; Jeong, G.-M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors 2016, 16, 1423. [Google Scholar] [CrossRef]
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Gutierrez Boronat, J. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Ladetto, Q. On foot navigation: Continuous step calibration using both complementary recursive prediction and adaptive Kalman filtering. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation, Salt Lake City, UT, USA, 19–22 September 2000; Volume 2000, pp. 1735–1740. [Google Scholar]
- Huang, B.; Qi, G.; Yang, X.; Zhao, L.; Zou, H. Exploiting cyclic features of walking for pedestrian dead reckoning with unconstrained smartphones. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; ACM Press: New York, NY, USA, 2016; pp. 374–385. [Google Scholar]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications. Available online: http://www.bdtic.com/DownLoad/ADI/AN-602.pdf (accessed on 17 February 2019).
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A Step, Stride and Heading Determination for the Pedestrian Navigation System. J. Glob. Position. Syst. 2004, 3, 273–279. [Google Scholar] [CrossRef]
- Miyazaki, S. Long-term unrestrained measurement of stride length and walking velocity utilizing a piezoelectric gyroscope. IEEE Trans. Biomed. Eng. 1997, 44, 753–759. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Groves, P.D. Context Determination for Adaptive Navigation using Multiple Sensors on a Smartphone. In Proceedings of the 29th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 12–16. [Google Scholar]
- Martinelli, A.; Gao, H.; Groves, P.D.; Morosi, S. Probabilistic Context-Aware Step Length Estimation for Pedestrian Dead Reckoning. IEEE Sens. J. 2018, 18, 1600–1611. [Google Scholar] [CrossRef]
- Munoz Diaz, E. Inertial Pocket Navigation System: Unaided 3D Positioning. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed]
- Diaz, E.M.; Gonzalez, A.L.M. Step detector and step length estimator for an inertial pocket navigation system. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, South Korea, 27–30 October 2014; pp. 105–110. [Google Scholar] [CrossRef]
- Zihajehzadeh, S.; Park, E.J. Experimental evaluation of regression model-based walking speed estimation using lower body-mounted IMU. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS), Orlando, FL, USA, 16–20 August 2016; pp. 243–246. [Google Scholar]
- Zihajehzadeh, S.; Park, E.J. Regression model-based walking speed estimation using wrist-worn inertial sensor. PLoS ONE 2016, 11, e0165211. [Google Scholar] [CrossRef] [PubMed]
- Hannink, J.; Kautz, T.; Pasluosta, C.F.; Barth, J.; Sch, S. Mobile Stride Length Estimation with Deep Convolutional Neural Networks. IEEE J. Biomed. Health Inform. 2018, 22, 354–362. [Google Scholar] [CrossRef] [PubMed]
- Cho, S.Y.; Park, C.G. MEMS Based Pedestrian Navigation System. J. Navig. 2005, 59, 135. [Google Scholar] [CrossRef]
- Alvarez, J.; Álvarez, D.; López, A. Accelerometry-Based Distance Estimation for Ambulatory Human Motion Analysis. Sensors 2018, 18, 4441. [Google Scholar] [CrossRef] [PubMed]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- x-IMU Sensor Board. Available online: http://x-io.co.uk/x-imu/ (accessed on 17 February 2019).
- Hayashitani, M.; Kasahara, T.; Ishii, D.; Arakawa, Y.; Okamoto, S.; Yamanaka, N.; Takezawa, N.; Nashimoto, K. 10ns High-speed PLZT optical content distribution system having slot-switch and GMPLS controller. IEICE Electron. Express 2008, 5, 181–186. [Google Scholar] [CrossRef]
- Tieleman, T.; Hinton, G.E.; Srivastava, N.; Swersky, K. Lecture 6.5-rmsprop: Divide the gradient by a running average of its recent magnitude. COURSERA Neural Networks Mach. Learn. 2012, 4, 26–31. [Google Scholar]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | LSTM | DAE | Final Model |
|---|---|---|---|
| Batch size | 128 | 128 | 128 |
| Hidden layers | 32-16-8-1 | 32-163 | 32-16-8-1 |
| Activation | ReLU | Sigmoid/Linear | ReLU |
| Optimizer | RMSprop [51] | RMSprop | RMSprop |
| Learning rate | 0.001 | 0.001 | 0.001 |
| Epochs | 500 | 50 | 500 |
| Early stopping | 50 | / | 50 |
| Loss function | MSE | MSE | MSE |
| Attributes | LSTM | LSTM-DAE | ||
|---|---|---|---|---|
| Error | Error Rate 1 | Error | Error Rate | |
| Mean | 0.051 | 3.75% | 0.043 | 3.16% |
| Std | 0.037 | - | 0.036 | - |
| 25% | 0.025 | 1.83% | 0.017 | 1.25% |
| 50% | 0.045 | 3.31% | 0.036 | 2.64% |
| 75% | 0.068 | 5.00% | 0.059 | 4.34% |
| min | 4.38 × 10−4 | 0 | 5.67 × 10−5 | 0 |
| max | 0.340 | 25.00% | 0.239 | 17.57% |
| Path | Attributes | Real | Proposed | Ladetto | Weinberg | Kim |
|---|---|---|---|---|---|---|
| a | Total distance (m) | 1267.82 | 1249.67 | 1238.20 | 1223.40 | 1219.74 |
| Error (m) | - | 18.15 | 29.62 | 45.42 | 48.08 | |
| Error rate 2 | - | 1.43% | 2.34% | 3.50% | 3.80% | |
| b | Total distance (m) | 94.43 | 93.01 | 91.75 | 97.57 | 97.69 |
| Error (m) | - | 1.42 | 2.68 | 3.14 | 3.26 | |
| Error rate | - | 1.50% | 2.83% | 3.32% | 3.45% |
| Models | Training Dataset Size | Test Dataset Size | Trainable Parameters | Training Time | Test Time |
|---|---|---|---|---|---|
| LSTM | 6571 strides | 888 strides | 40737 | 2 h 11 min 34 s | 2.158 s |
| LSTM-DAE | 92101 (40737 + 10627 + 40737) | 3 h 01 min 26 s | 2.369 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Ye, L.; Luo, H.; Men, A.; Zhao, F.; Huang, Y. Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders. Sensors 2019, 19, 840. https://doi.org/10.3390/s19040840
Wang Q, Ye L, Luo H, Men A, Zhao F, Huang Y. Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders. Sensors. 2019; 19(4):840. https://doi.org/10.3390/s19040840
Chicago/Turabian StyleWang, Qu, Langlang Ye, Haiyong Luo, Aidong Men, Fang Zhao, and Yan Huang. 2019. "Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders" Sensors 19, no. 4: 840. https://doi.org/10.3390/s19040840
APA StyleWang, Q., Ye, L., Luo, H., Men, A., Zhao, F., & Huang, Y. (2019). Pedestrian Stride-Length Estimation Based on LSTM and Denoising Autoencoders. Sensors, 19(4), 840. https://doi.org/10.3390/s19040840