Accurate 3D Shape, Displacement and Deformation Measurement Using a Smartphone


Abstract
:1. Introduction
2. Method
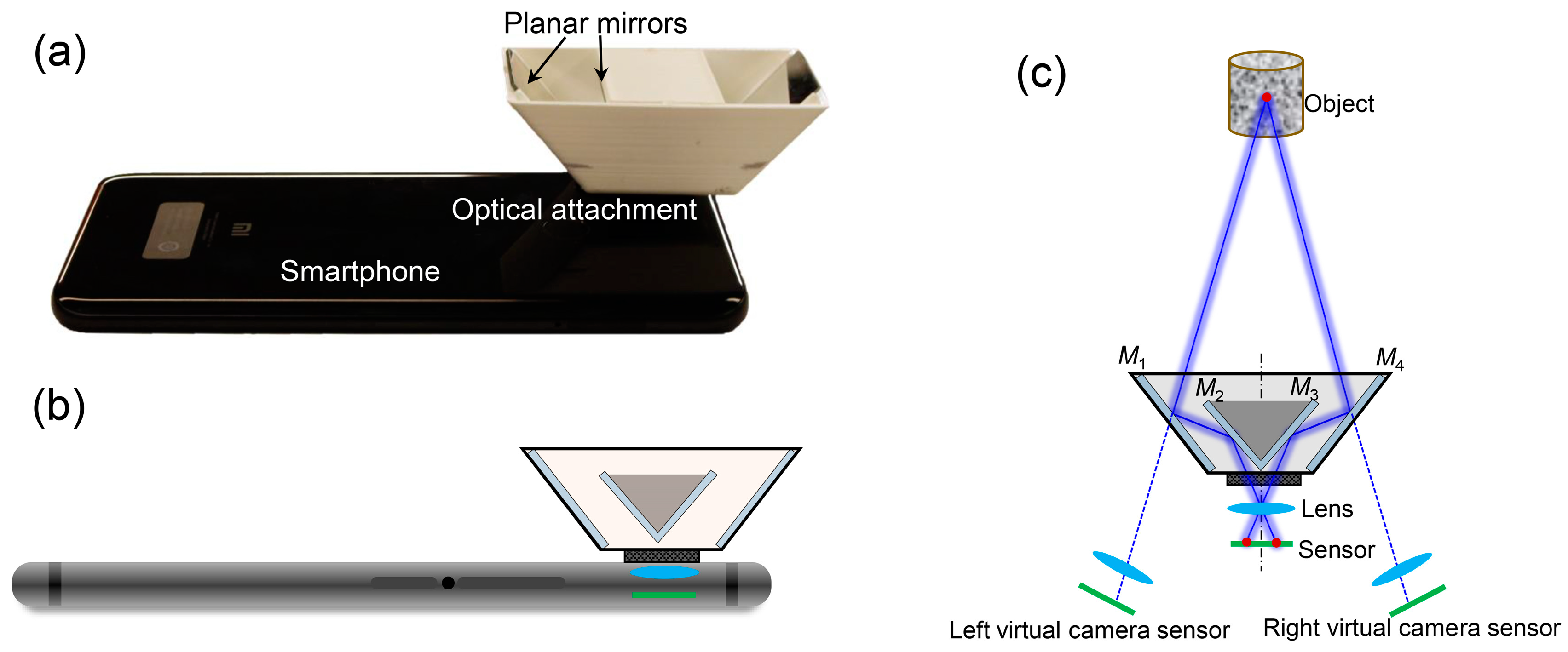
2.1. Experimental Set-Up
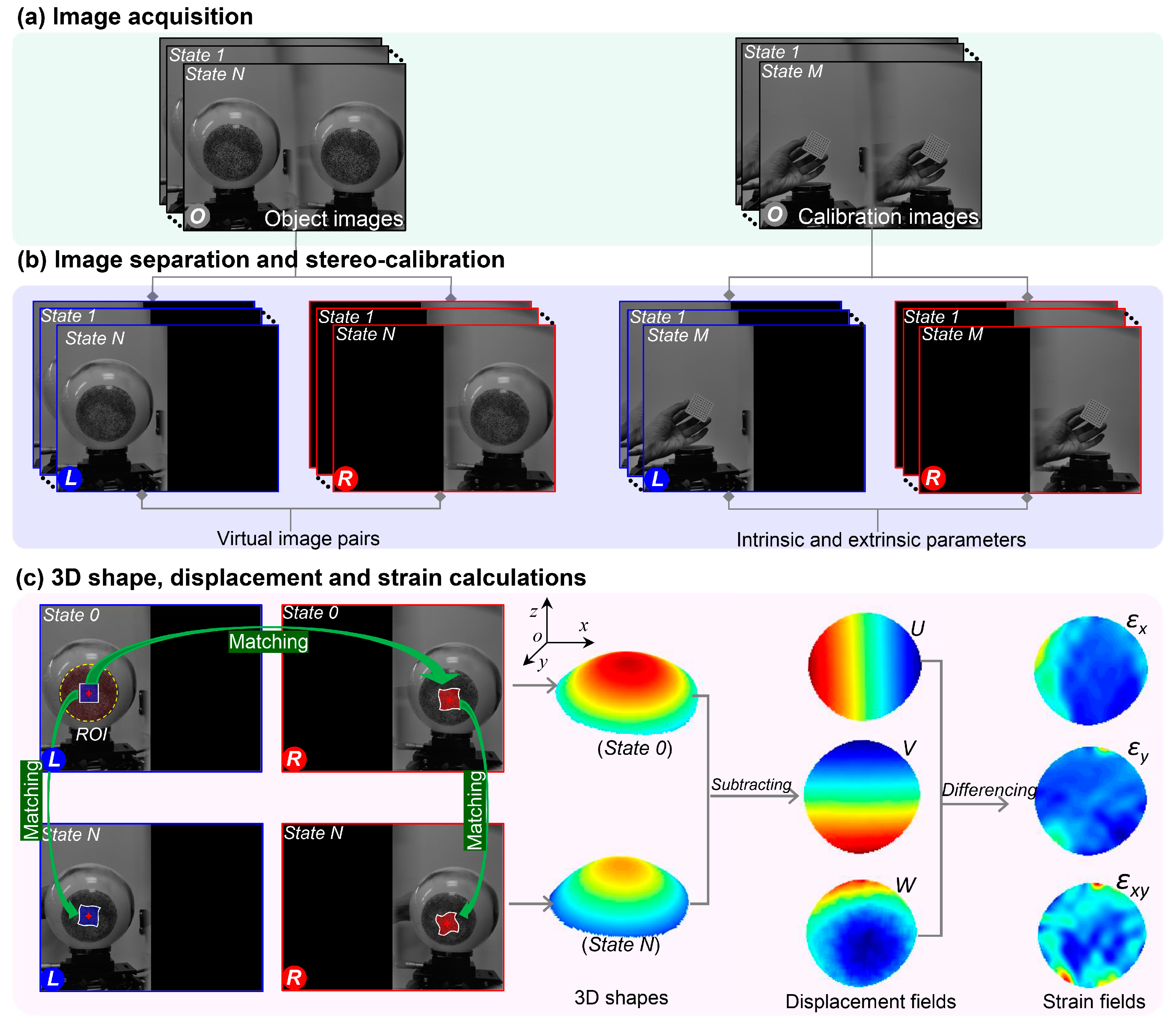
2.2. Principles: 3D Shape, Displacement and Deformation Measurement
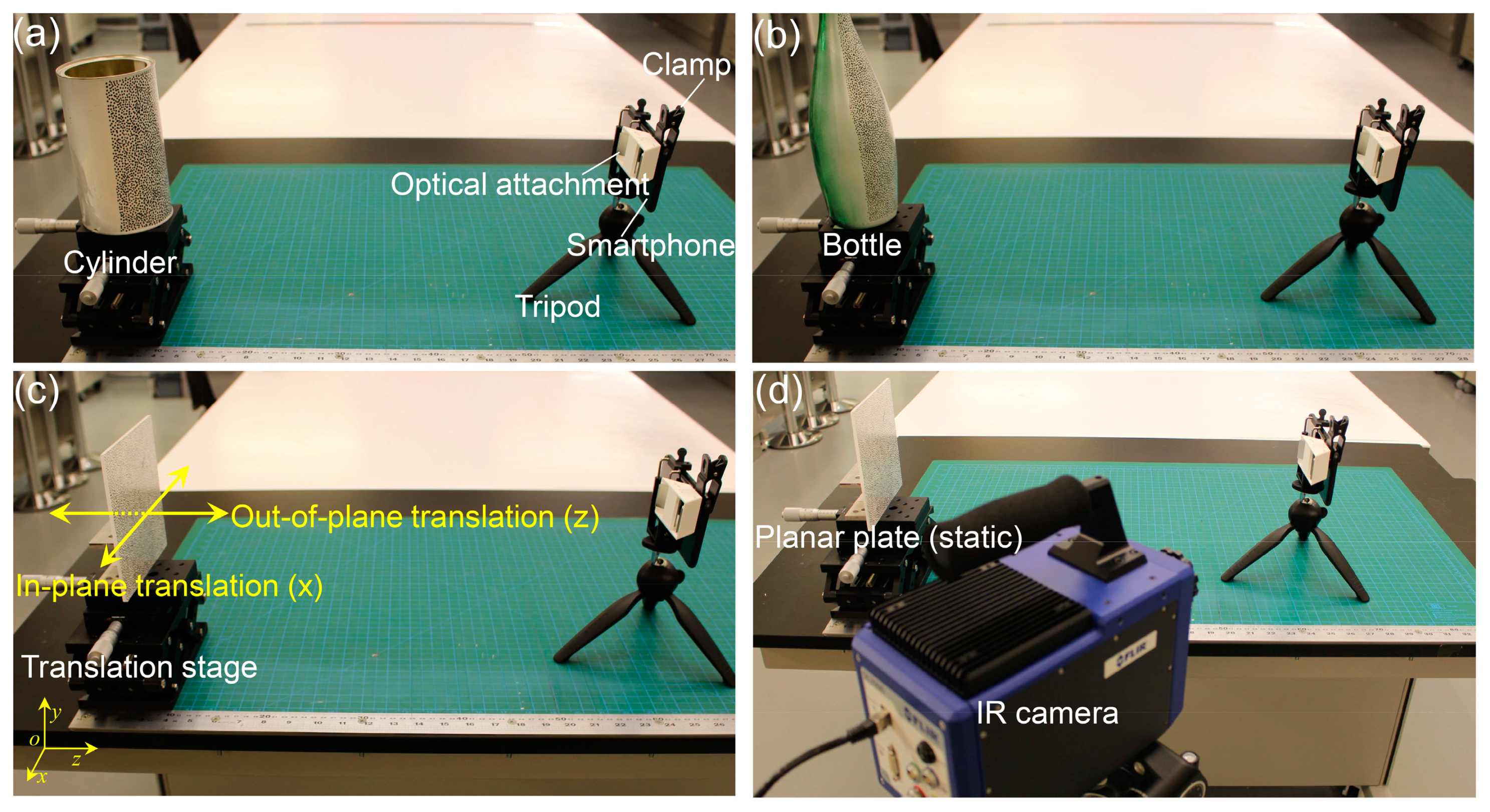
3. Experiments
4. Results
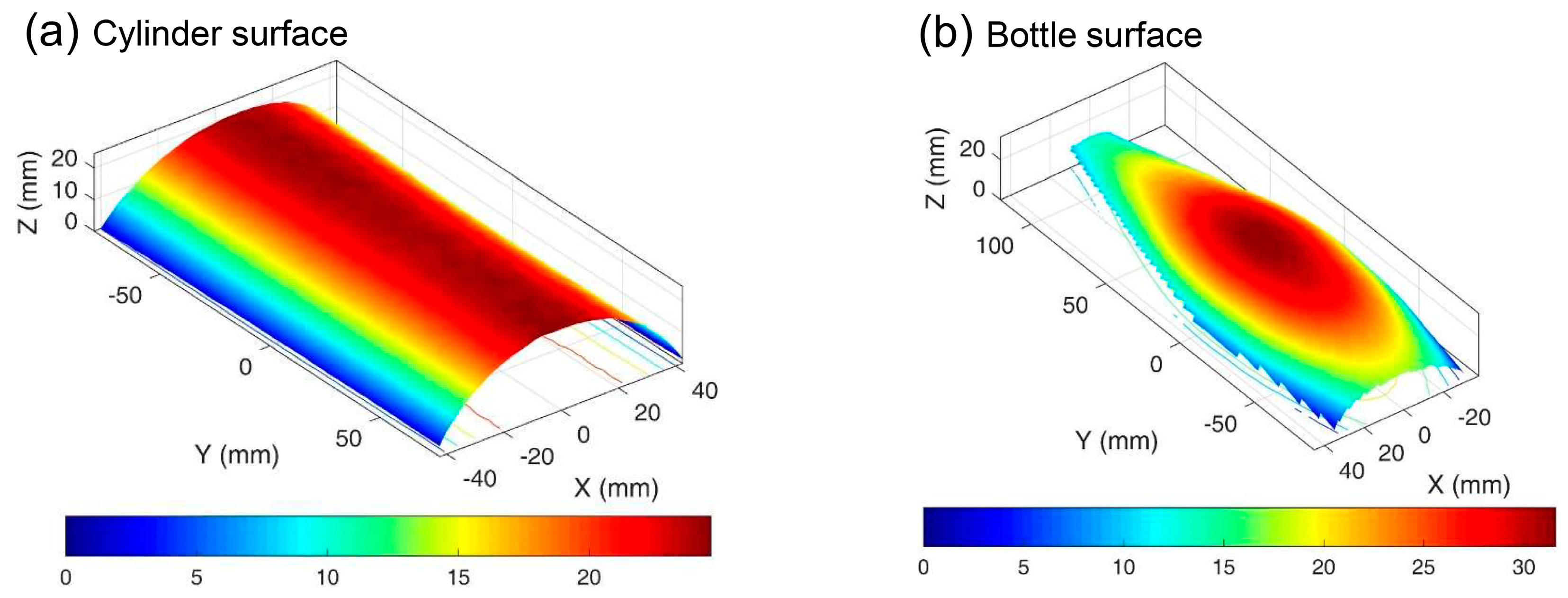
4.1. Shape Measurements of Cylinder and Curved Bottle Surfaces
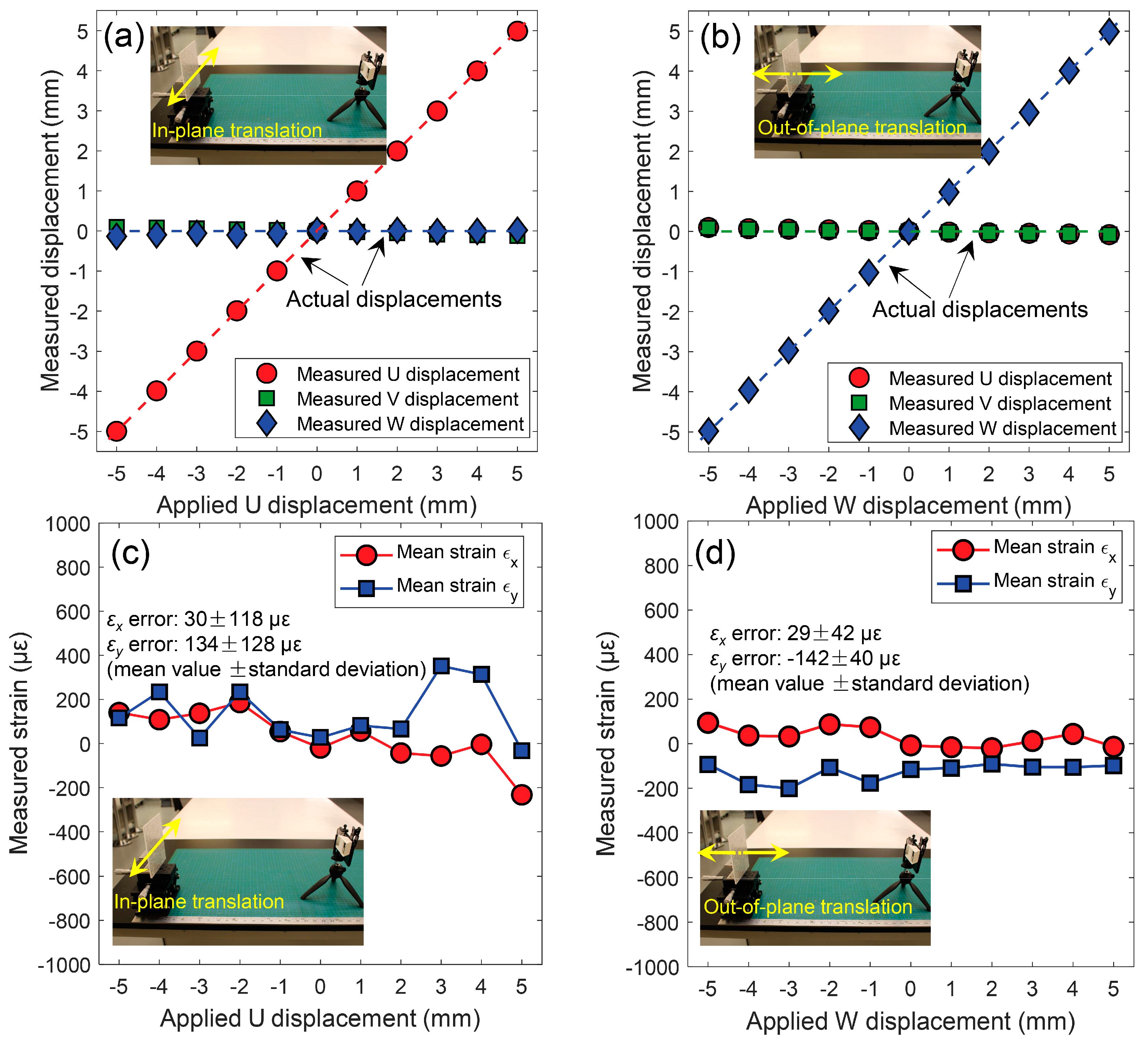
4.2. In-Plane and Out-of-Plane Displacement Measurement
4.3. Stability Analysis of the Smartphone-Based Stereo-DIC System
4.3.1. Thermal Variation and Virtual Strain Measurement
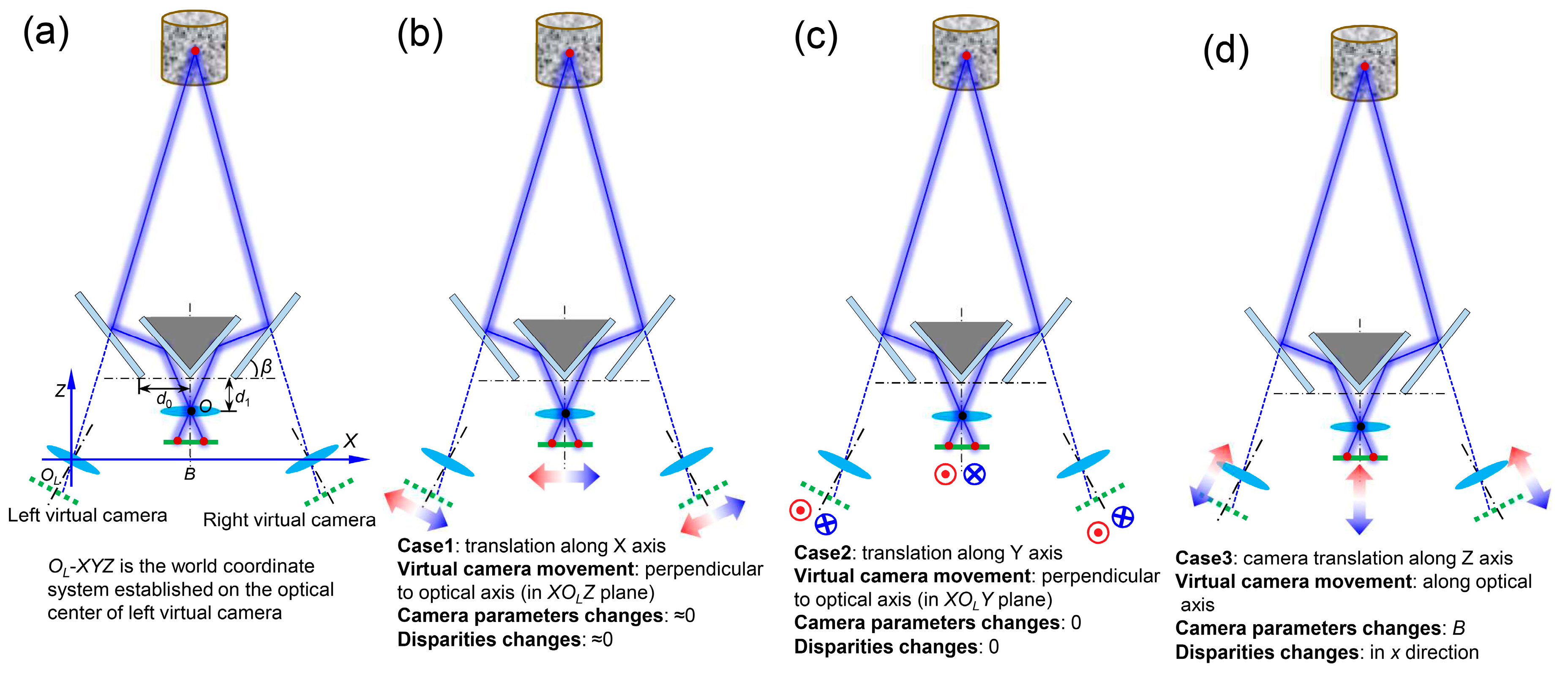
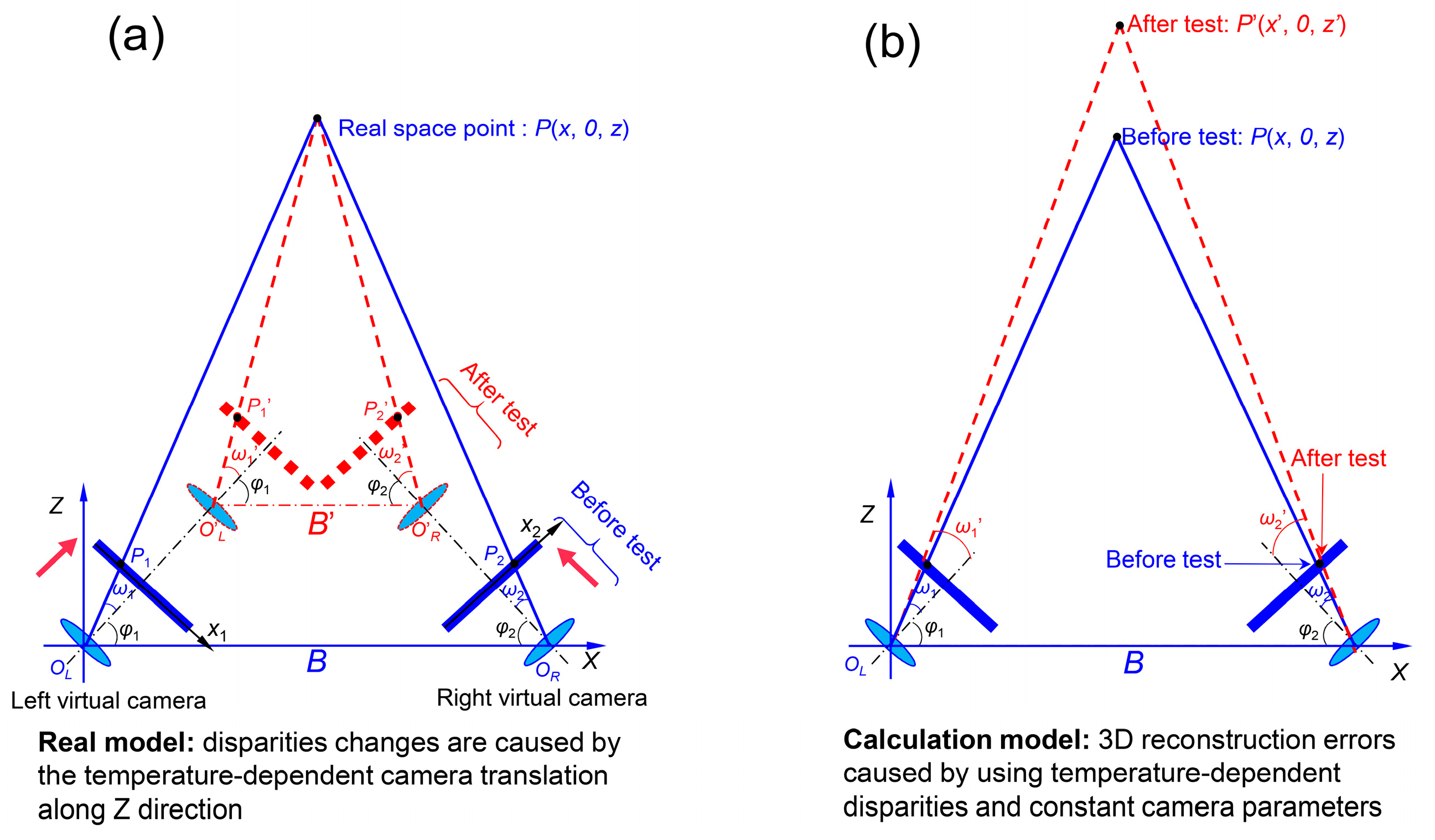
4.3.2. Modeling of Camera Self-Heating on the Single-Camera Stereo-DIC System
4.3.3. Verification of the Analysis
5. Applications of the Smartphone-Based Stereo-DIC System to 2D and 3D Deformation Measurement
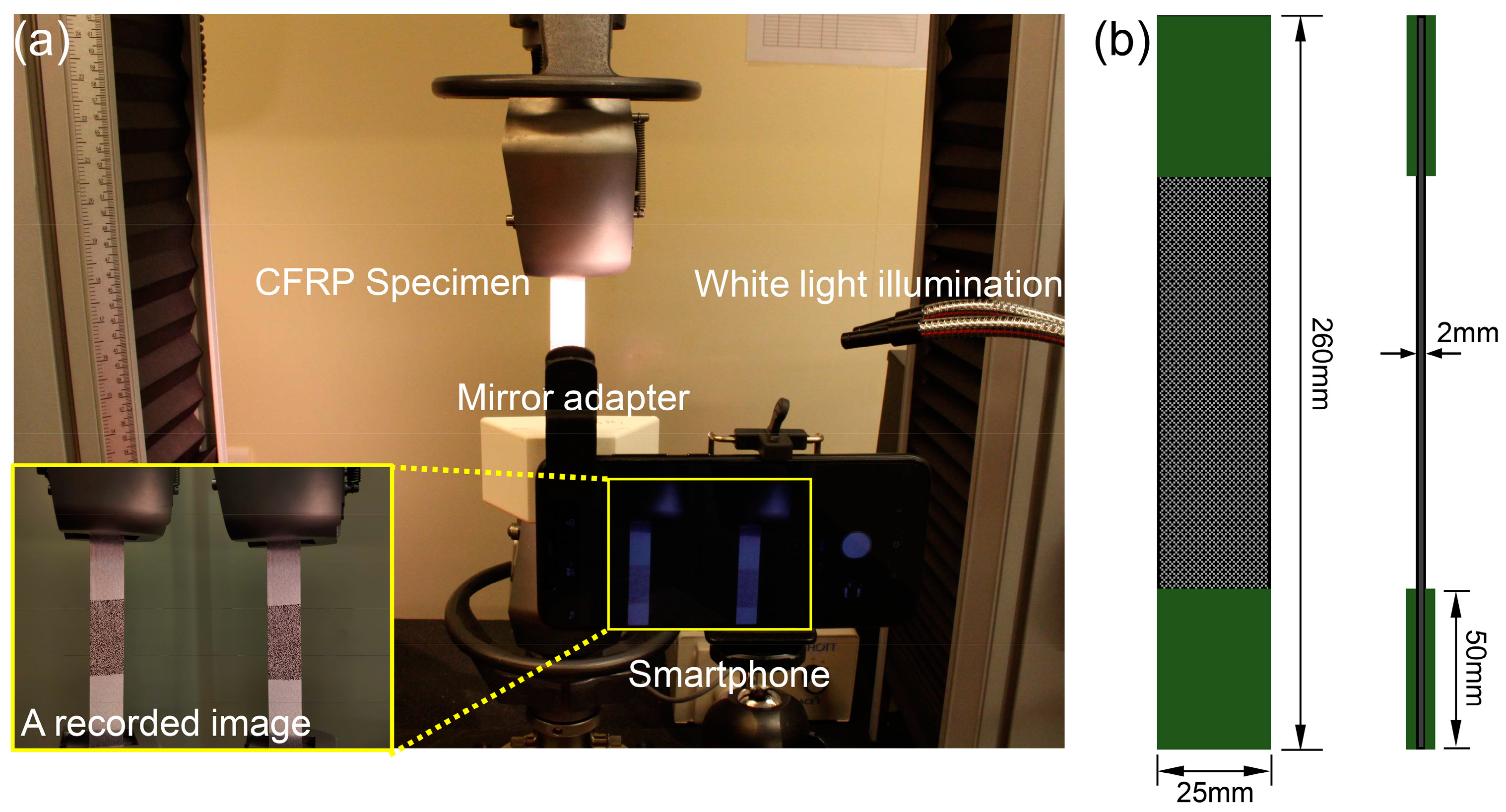
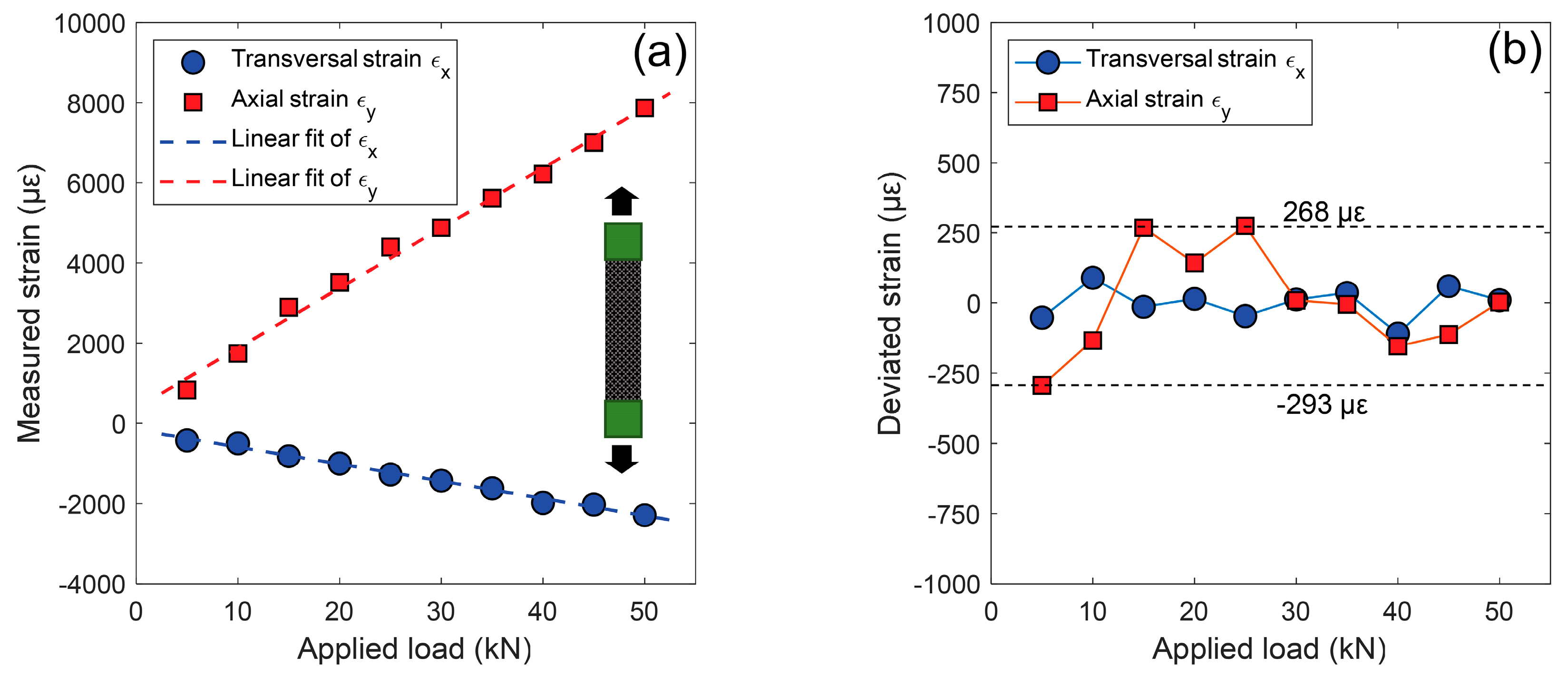
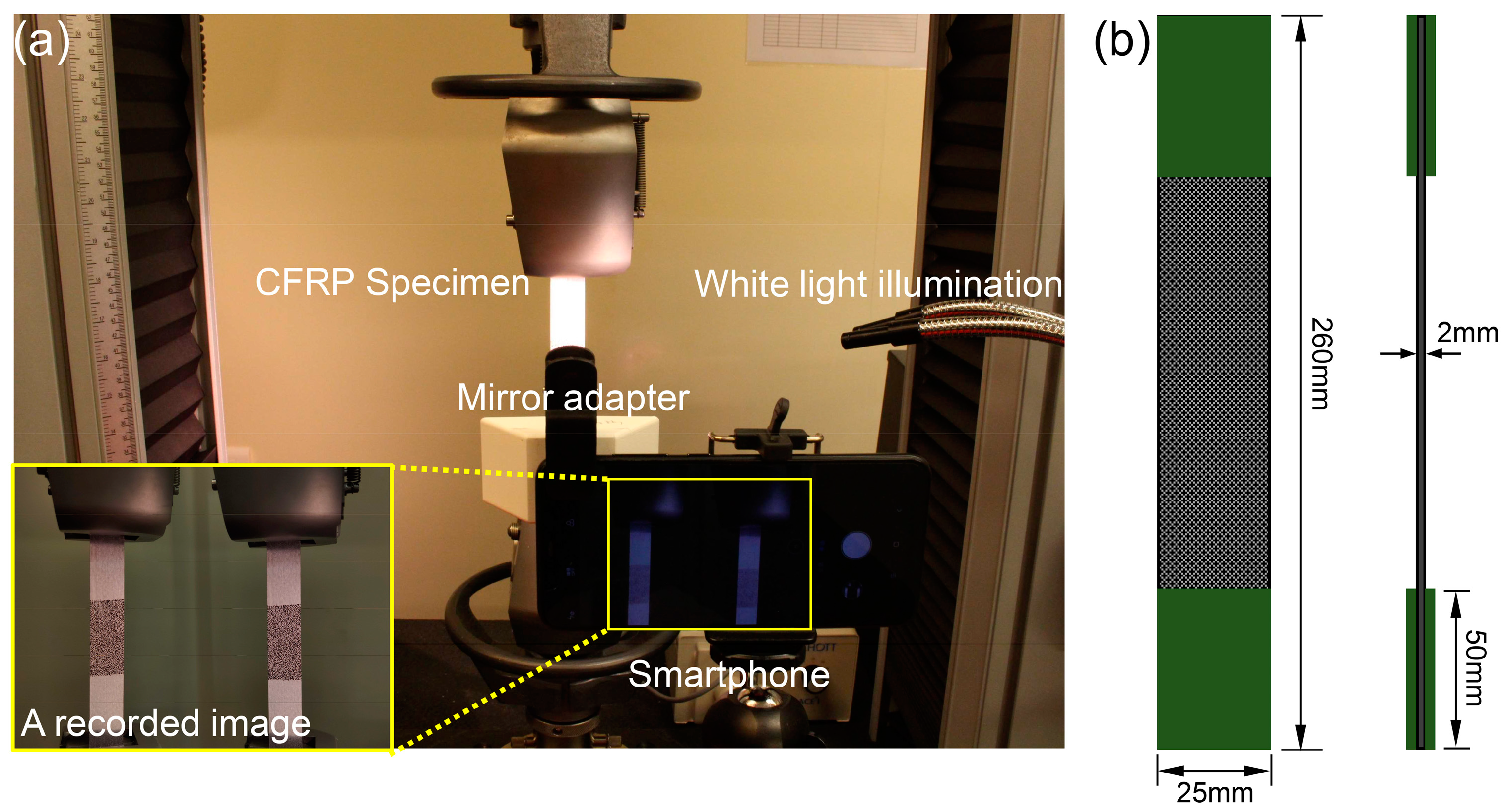
5.1. Tensile Test of CFRP Specimen
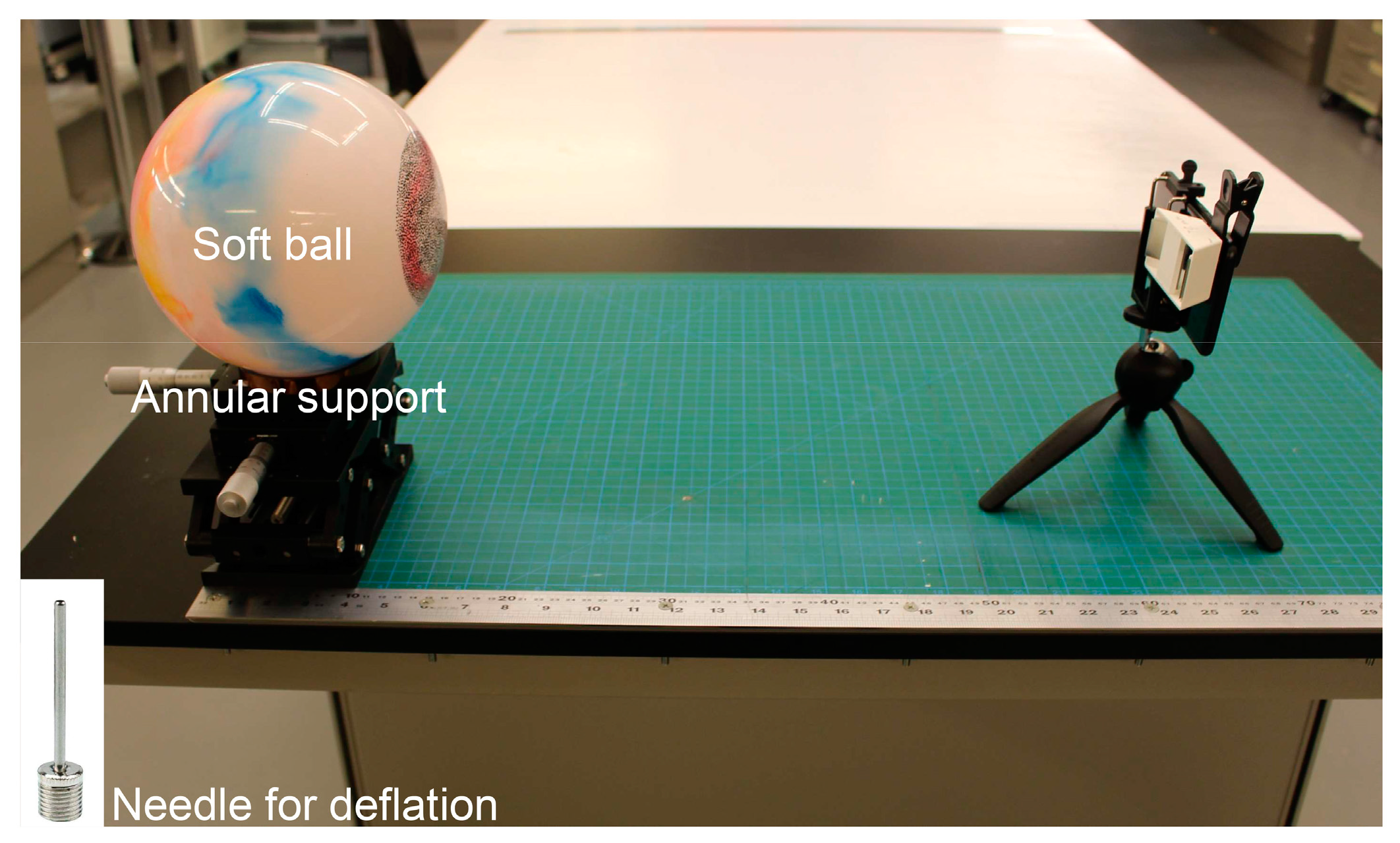
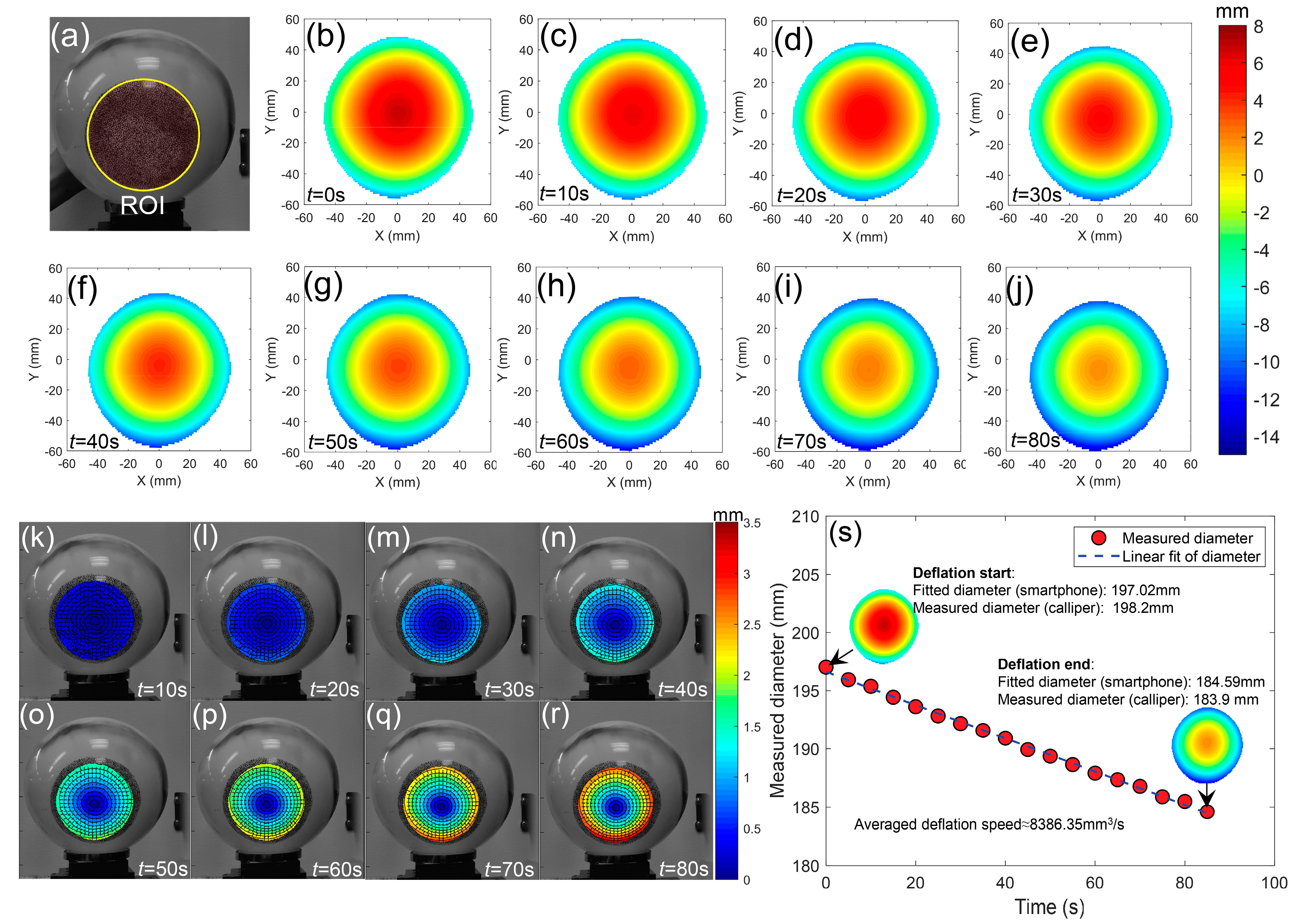
5.2. Three-Dimensional Deformation Measurement of a Deflating Ball
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martinez, A.; Rayas, J.A.; Rodriguez-Vera, R.; Puga, H.J. Three-dimensional deformation measurement from the combination of in-plane and out-of-plane electronic speckle pattern interferometers. Appl. Opt. 2004, 43, 4652–4658. [Google Scholar] [CrossRef]
- Francis, D.; Tatam, R.P.; Groves, R.M. Shearography technology and applications: A review. Meas. Sci. Technol. 2010, 21, 102001. [Google Scholar] [CrossRef]
- Javidi, B.; Tajahuerce, E. Three-dimensional object recognition by use of digital holography. Opt. Lett. 2000, 25, 610–612. [Google Scholar] [CrossRef]
- Pedrini, G.; Fröning, P.; Tiziani, H.J.; Mendoza Santoyo, F. Shape measurement of microscopic structures using digital holograms. Opt. Commun. 1999, 164, 257–268. [Google Scholar] [CrossRef]
- Luo, P.F.; Chao, Y.J.; Sutton, M.A.; Peters, W.H. Accurate measurement of three-dimensional deformations in deformable and rigid bodies using computer vision. Exp. Mech. 1993, 33, 123–132. [Google Scholar] [CrossRef]
- Sutton, M.A. Three-dimensional digital image correlation to quantify deformation and crack-opening displacement in ductile aluminum under mixed-mode I/III loading. Opt. Eng. 2007, 46, 051003. [Google Scholar] [CrossRef]
- Orteu, J.J. 3-D computer vision in experimental mechanics. Opt. Lasers Eng. 2009, 47, 282–291. [Google Scholar] [CrossRef]
- Pan, B. Digital image correlation for surface deformation measurement: Historical developments, recent advances and future goals. Meas. Sci. Technol. 2018, 29, 082001. [Google Scholar] [CrossRef]
- Pankow, M.; Justusson, B.; Waas, A.M. Three-dimensional digital image correlation technique using single high-speed camera for measuring large out-of-plane displacements at high framing rates. Appl. Opt. 2010, 49, 3418–3427. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. Single-camera stereo-digital image correlation with a four-mirror adapter: optimized design and validation. Opt. Lasers Eng. 2016, 87, 120–128. [Google Scholar] [CrossRef]
- Shao, X.; Eisa, M.M.; Chen, Z.; Dong, S.; He, X. Self-calibration single-lens 3D video extensometer for high-accuracy and real-time strain measurement. Opt. Express 2016, 24, 30124–30138. [Google Scholar] [CrossRef]
- López-Alba, E.; Felipe-Sesé, L.; Schmeer, S.; Díaz, F.A. Optical low-cost and portable arrangement for full field 3D displacement measurement using a single camera. Meas. Sci. Technol. 2016, 27, 115901. [Google Scholar] [CrossRef]
- Genovese, K.; Casaletto, L.; Rayas, J.A.; Flores, V.; Martinez, A. Stereo-Digital Image Correlation (DIC) measurements with a single camera using a biprism. Opt. Lasers Eng. 2013, 51, 278–285. [Google Scholar] [CrossRef]
- Wu, L.F.; Zhu, J.G.; Xie, H.M.; Zhang, Q. An Accurate Method for Shape Retrieval and Displacement Measurement Using Bi-Prism-Based Single Lens 3D Digital Image Correlation. Exp. Mech. 2016, 56, 1611–1624. [Google Scholar] [CrossRef]
- Xia, S.; Gdoutou, A.; Ravichandran, G. Diffraction Assisted Image Correlation: A Novel Method for Measuring Three-Dimensional Deformation using Two-Dimensional Digital Image Correlation. Exp. Mech. 2013, 53, 755–765. [Google Scholar] [CrossRef]
- Pan, B.; Wang, Q. Single-camera microscopic stereo digital image correlation using a diffraction grating. Opt. Express 2013, 21, 25056–25068. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. Color Stereo-Digital Image Correlation Method Using a Single 3CCD Color Camera. Exp. Mech. 2017, 57, 649–657. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. Full-frame, high-speed 3D shape and deformation measurements using stereo-digital image correlation and a single color high-speed camera. Opt. Lasers Eng. 2017, 95, 17–25. [Google Scholar] [CrossRef]
- Chi, Y.; Yu, L.; Pan, B. Low-cost, portable, robust and high-resolution single-camera stereo-DIC system and its application in high-temperature deformation measurements. Opt. Lasers Eng. 2018, 104, 141–148. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, Z.; Jones, P.; Zhao, B. 3D shape, deformation, and vibration measurements using infrared Kinect sensors and digital image correlation. Appl. Opt. 2017, 56, 9030–9037. [Google Scholar] [CrossRef]
- Contreras-Naranjo, J.C.; Wei, Q.; Ozcan, A. Mobile Phone-Based Microscopy, Sensing, and Diagnostics. IEEE J. Sel. Top. Quantum Electron. 2016, 22, 1–14. [Google Scholar] [CrossRef]
- Wei, Q.; Luo, W.; Chiang, S.; Kappel, T.; Mejia, C.; Tseng, D.; Chan, R.Y.L.; Yan, E.; Qi, H.; Shabbir, F.; et al. Imaging and sizing of single DNA molecules on a mobile phone. ACS Nano 2014, 8, 12725–12733. [Google Scholar] [CrossRef]
- Pirnstill, C.W.; Coté, G.L. Malaria Diagnosis Using a Mobile Phone Polarized Microscope. Sci. Rep. 2015, 5, 13368. [Google Scholar] [CrossRef]
- Orth, A.; Wilson, E.R.; Thompson, J.G.; Gibson, B.C. A dual-mode mobile phone microscope using the onboard camera flash and ambient light. Sci. Rep. 2018, 8, 3298. [Google Scholar] [CrossRef]
- Zhu, H.; Sencan, I.; Wong, J.; Dimitrov, S.; Tseng, D.; Nagashima, K.; Ozcan, A. Cost-effective and rapid blood analysis on a cell-phone. Lab Chip 2013, 13, 1282–1288. [Google Scholar] [CrossRef]
- Selck, D.A.; Karymov, M.A.; Sun, B.; Ismagilov, R.F. Increased robustness of single-molecule counting with microfluidics, digital isothermal amplification, and a mobile phone versus real-time kinetic measurements. Anal. Chem. 2013, 85, 11129–11136. [Google Scholar] [CrossRef]
- Ming, K.; Kim, J.; Biondi, M.J.; Syed, A.; Chen, K.; Lam, A.; Ostrowski, M.; Rebbapragada, A.; Feld, J.J.; Chan, W.C.W. Integrated quantum dot barcode smartphone optical device for wireless multiplexed diagnosis of infected patients. ACS Nano 2015, 9, 3060–3074. [Google Scholar] [CrossRef]
- Feng, S.; Caire, R.; Cortazar, B.; Turan, M.; Wong, A.; Ozcan, A. Immunochromatographic diagnostic test analysis using google glass. ACS Nano 2014, 8, 3069–3079. [Google Scholar] [CrossRef]
- Aguirre-Pablo, A.A.; Alarfaj, M.K.; Li, E.Q.; Hernández-Sánchez, J.F.; Thoroddsen, S.T. Tomographic Particle Image Velocimetry using Smartphones and Colored Shadows. Sci. Rep. 2017, 7, 3714. [Google Scholar] [CrossRef]
- Kim, S.; Kim, K.C.; Yeom, E. Microfluidic method for measuring viscosity using images from smartphone. Opt. Lasers Eng. 2018, 104, 237–243. [Google Scholar] [CrossRef]
- Wang, N.; Ri, K.; Liu, H.; Zhao, X. Structural displacement monitoring using smartphone camera and digital image correlation. IEEE Sens. J. 2018, 21600, 1. [Google Scholar] [CrossRef]
- Orak, M.S.; Nasrollahi, A.; Ozturk, T.; Mas, D.; Ferrer, B.; Rizzo, P. Non-contact smartphone-based monitoring of thermally stressed structures. Sensors (Switzerland) 2018, 18, 1250. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. In-plane displacement and strain measurements using a camera phone and digital image correlation. Opt. Eng. 2014, 53, 054107. [Google Scholar] [CrossRef]
- Sutton, M.A.; Orteu, J.J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications; Springer Science & Business Media: Berlin, Germany, 2009. [Google Scholar]
- Blaber, J.; Adair, B.; Antoniou, A. Ncorr: Open-Source 2D Digital Image Correlation Matlab Software. Exp. Mech. 2015, 55, 1105–1122. [Google Scholar] [CrossRef]
- DZ Turner, Digital Image Correlation Engine (DICe). Available online: https://github.com/dicengine/dice (accessed on 10 November 2018).
- Solav, D.; Moerman, K.M.; Jaeger, A.M.; Genovese, K.; Herr, H.M. MultiDIC: An open-source toolbox for multi-view 3D digital image correlation. IEEE Access 2018. [Google Scholar] [CrossRef]
- Pan, B.; Shi, W.; Lubineau, G. Effect of camera temperature variations on stereo-digital image correlation measurements. Appl. Opt. 2015, 54, 10089–10095. [Google Scholar] [CrossRef]
- Handel, H. Analyzing the influences of camera warm-up effects on image acquisition. In Asian Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Podbreznik, P.; Potočnik, B. Assessing the influence of temperature variations on the geometrical properties of a low-cost calibrated camera system by using computer vision procedures. Mach. Vis. Appl. 2012, 23, 953–966. [Google Scholar] [CrossRef]
- Ma, Q.; Ma, S. Experimental investigation of the systematic error on photomechanic methods induced by camera self-heating. Opt. Express 2013, 21, 7686–7698. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. Structure parameter analysis and uncertainty evaluation for single-camera stereo-digital image correlation with a four-mirror adapter. Appl. Opt. 2016, 55, 6936–6946. [Google Scholar] [CrossRef]
- Pan, B. Thermal error analysis and compensation for digital image/volume correlation. Opt. Lasers Eng. 2018, 101, 1–15. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intrinsic Parameters | Extrinsic Parameters | |||
|---|---|---|---|---|
| Left camera | cx (pixel) | 1034.76 | α (deg) | −1.305 |
| cy (pixel) | 764.58 | β (deg) | 27.878 | |
| fx (pixel) | 2642.17 | γ (deg) | −0.092 | |
| fy (pixel) | 2647.80 | tx (mm) | −47.169 | |
| k1 | 0.119 | ty (mm) | 0.039 | |
| Right camera | cx (pixel) | 1024.21 | tz (mm) | 12.219 |
| cy (pixel) | 746.63 | Baseline (mm) | 48.73 | |
| fx (pixel) | 2658.91 | |||
| fy (pixel) | 2661.20 | |||
| k1 | 0.142 | |||
| Test No. | Elasticity Modulus (GPa) | Poisson’s Ratio |
|---|---|---|
| Test 1 | 132.80 | 0.274 |
| Test 2 | 135.95 | 0.320 |
| Test 3 | 132.04 | 0.286 |
| Mean vale | 133.59 | 0.293 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Tao, R.; Lubineau, G. Accurate 3D Shape, Displacement and Deformation Measurement Using a Smartphone. Sensors 2019, 19, 719. https://doi.org/10.3390/s19030719
Yu L, Tao R, Lubineau G. Accurate 3D Shape, Displacement and Deformation Measurement Using a Smartphone. Sensors. 2019; 19(3):719. https://doi.org/10.3390/s19030719
Chicago/Turabian StyleYu, Liping, Ran Tao, and Gilles Lubineau. 2019. "Accurate 3D Shape, Displacement and Deformation Measurement Using a Smartphone" Sensors 19, no. 3: 719. https://doi.org/10.3390/s19030719
APA StyleYu, L., Tao, R., & Lubineau, G. (2019). Accurate 3D Shape, Displacement and Deformation Measurement Using a Smartphone. Sensors, 19(3), 719. https://doi.org/10.3390/s19030719