Motion Artifact Reduction for Wrist-Worn Photoplethysmograph Sensors Based on Different Wavelengths



 ,
,
Abstract
:1. Introduction
2. Micromotion Artifacts
2.1. Photoelectric Motion Reference
2.2. Motion Artifacts Reduction Algorithms
3. Dataset and Signal Property
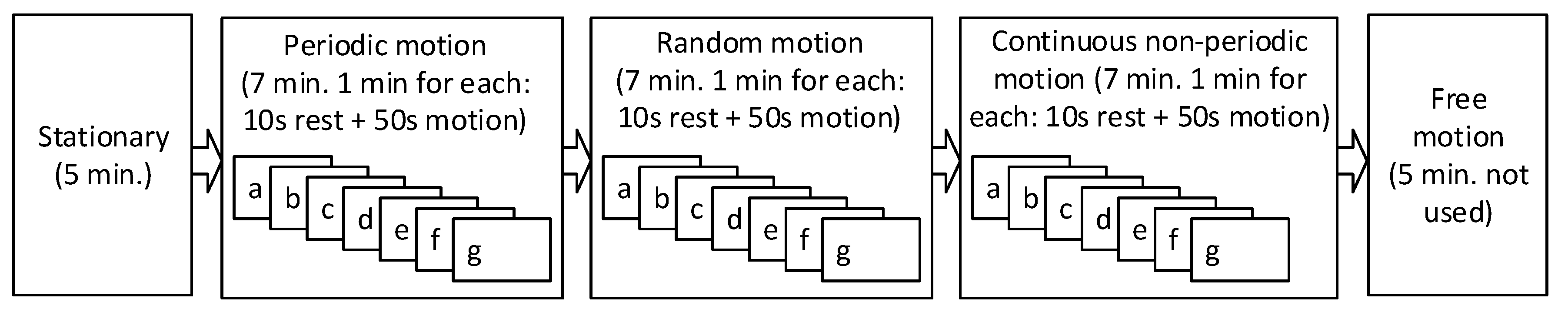
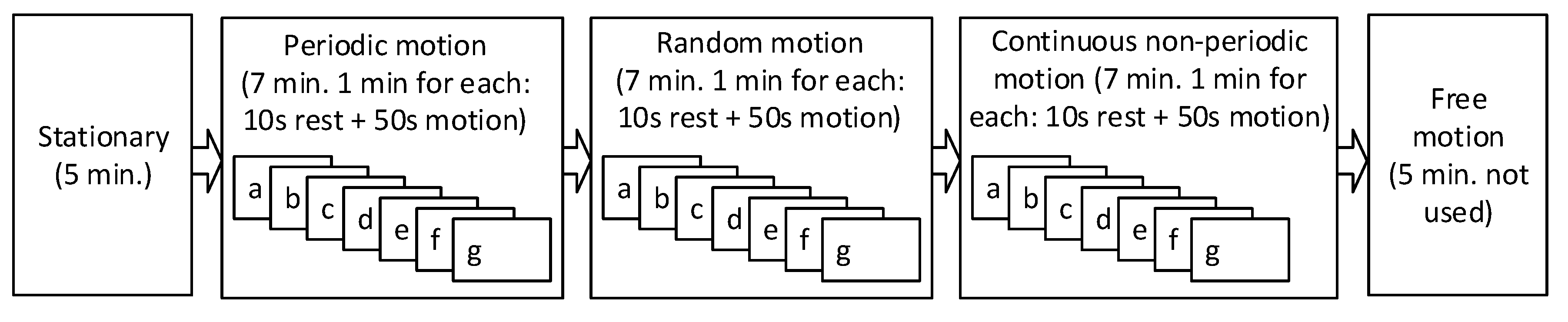
3.1. Dataset and Measurement Setup
- (a)
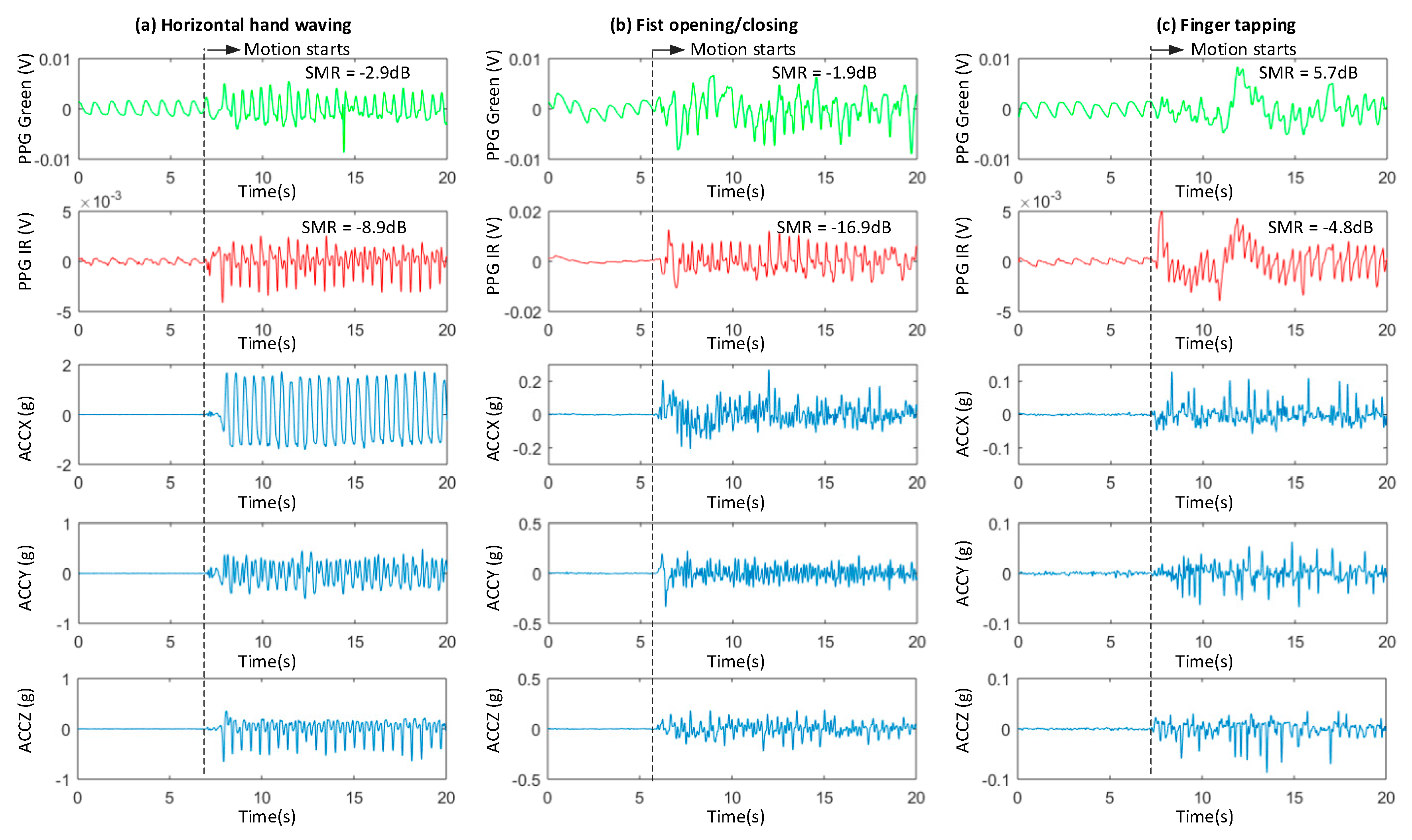
- Index finger tapping
- (b)
- Hand waving (horizontal)
- (c)
- Hand shaking (vertical)
- (d)
- Running arm swing
- (e)
- Fist opening and closing
- (f)
- Radial/ulnar deviation
- (g)
- Wrist extension/flexion
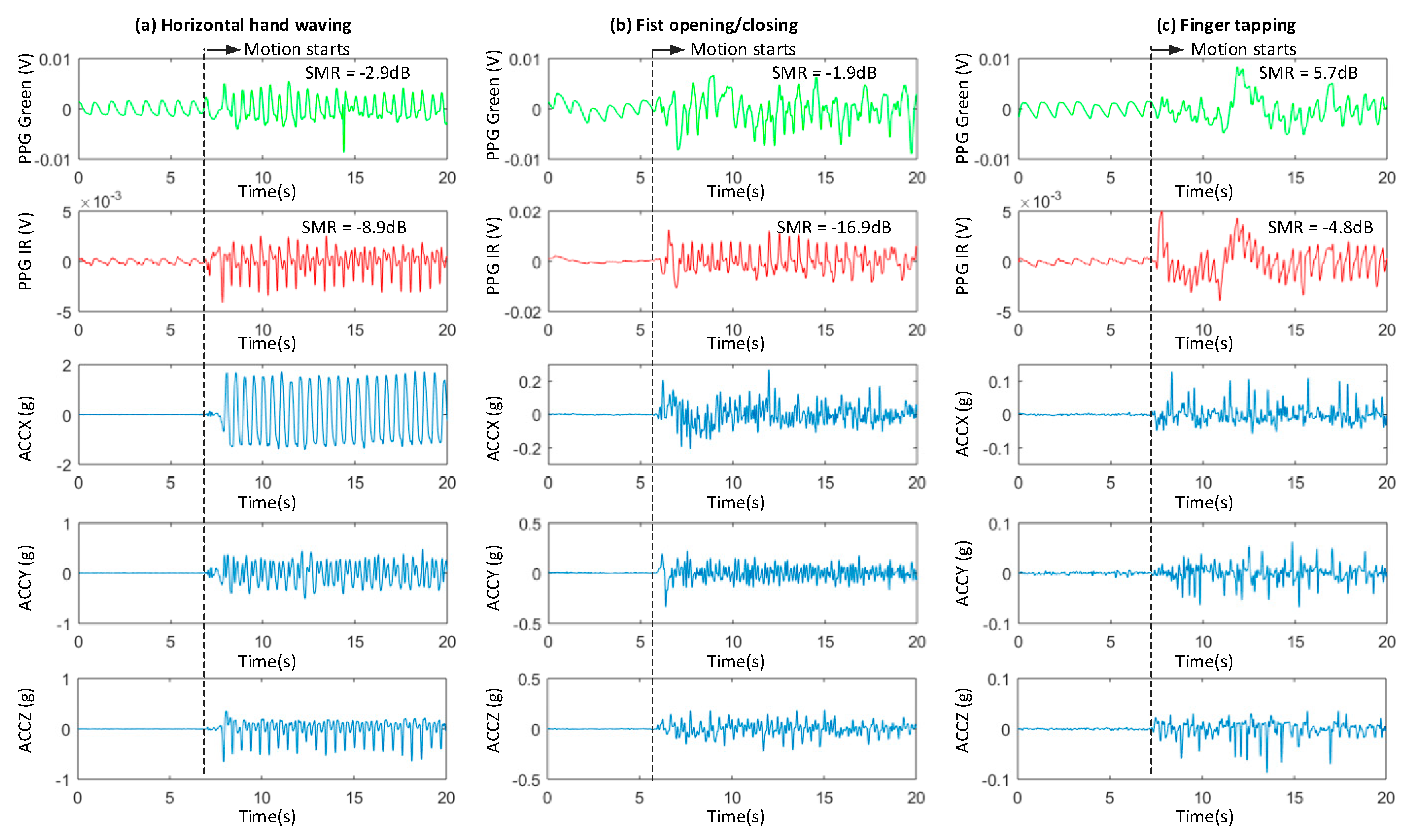
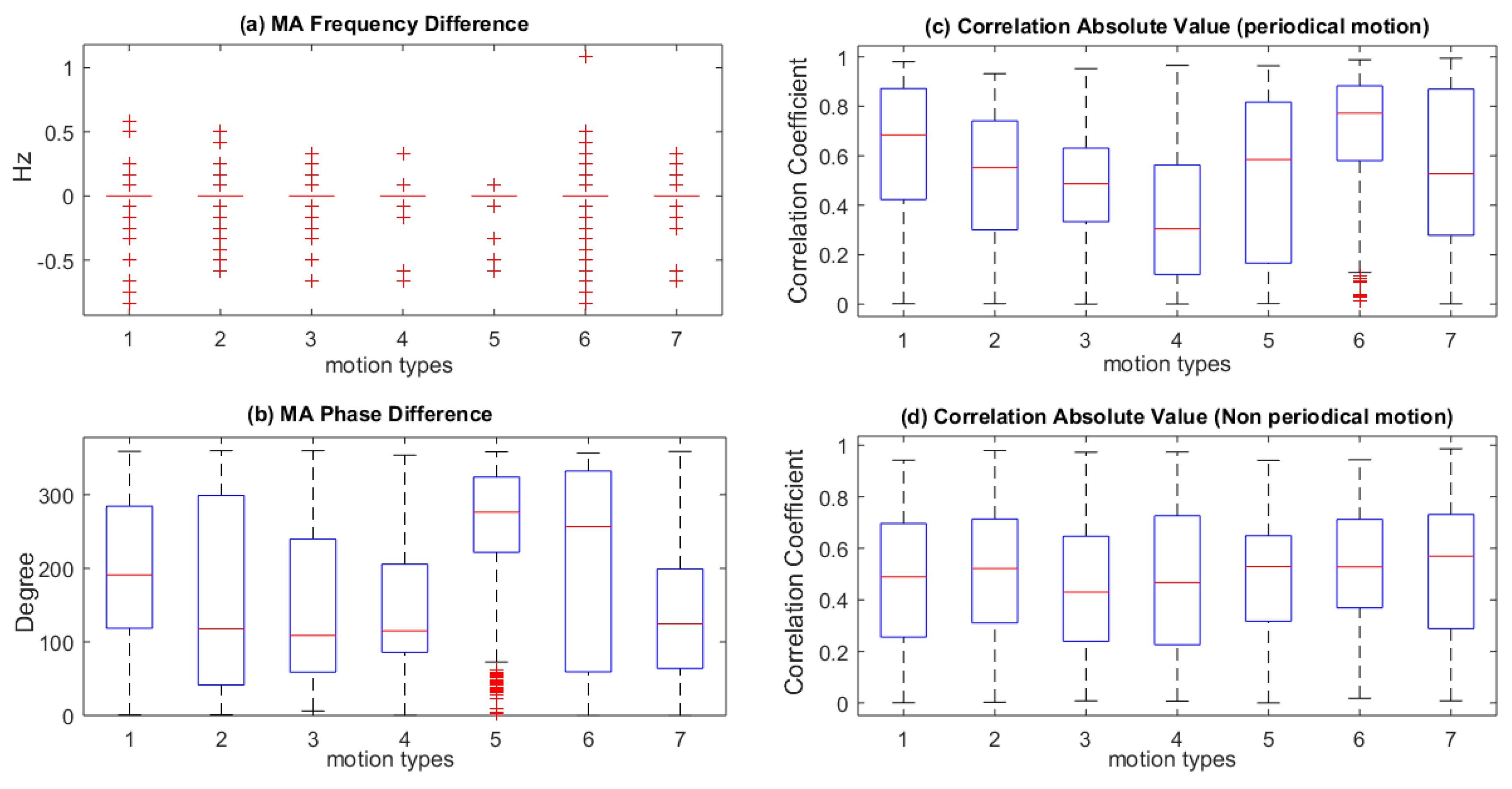
3.2. Signal Property
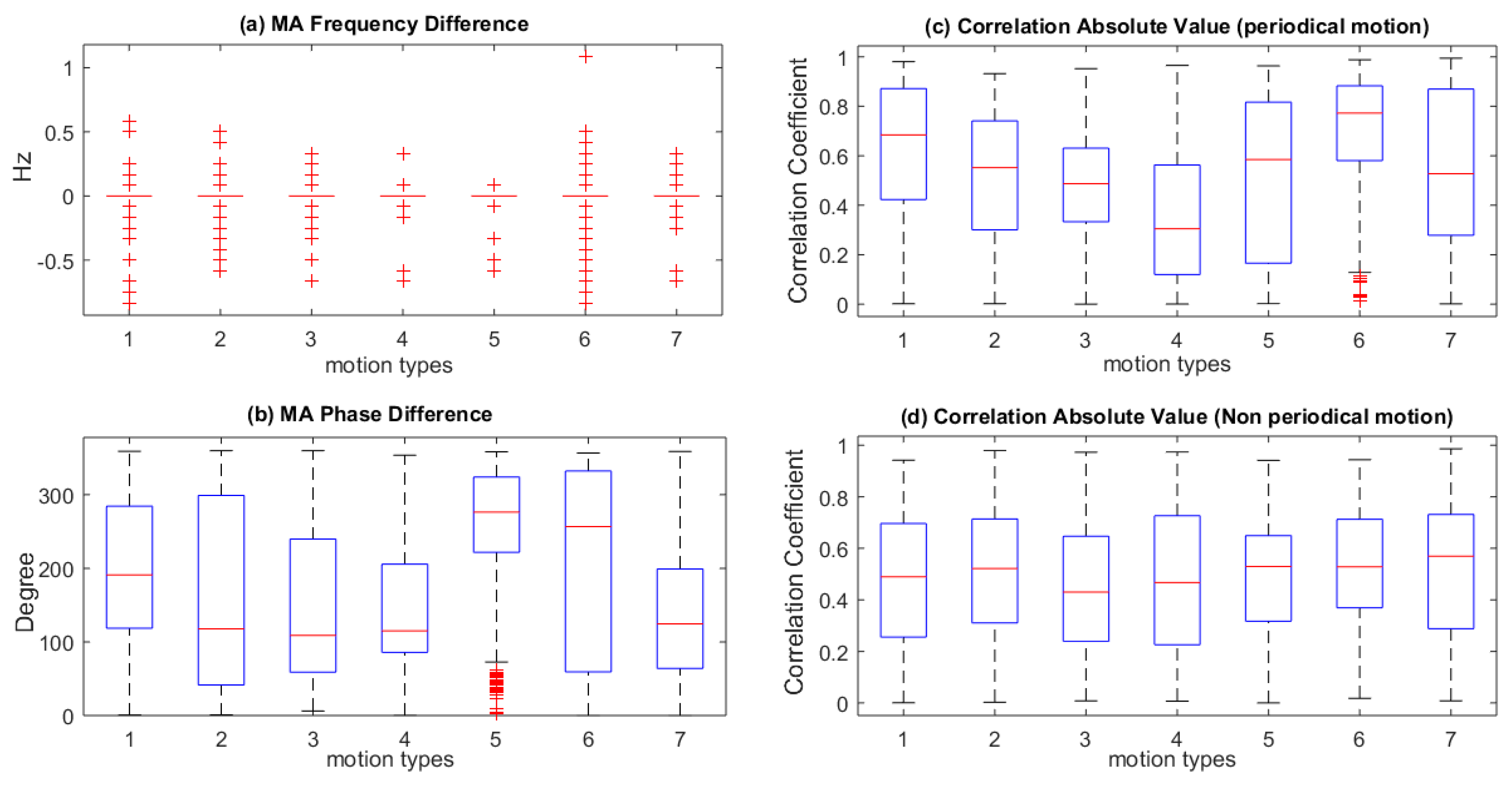
3.2.1. Correlation between MA in Green and IR PPG Signals
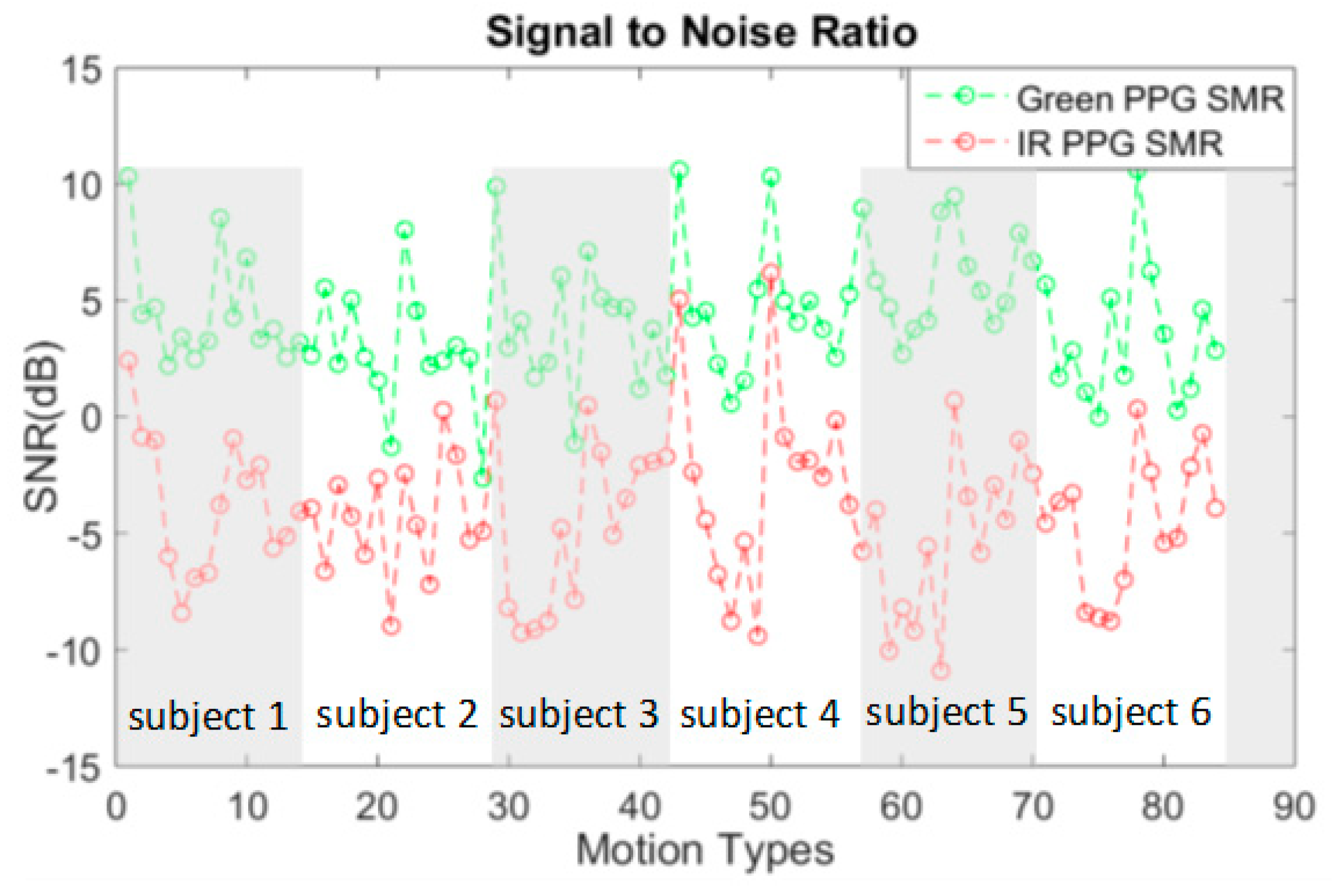
3.2.2. Clean PPG Signal to MA Ratio
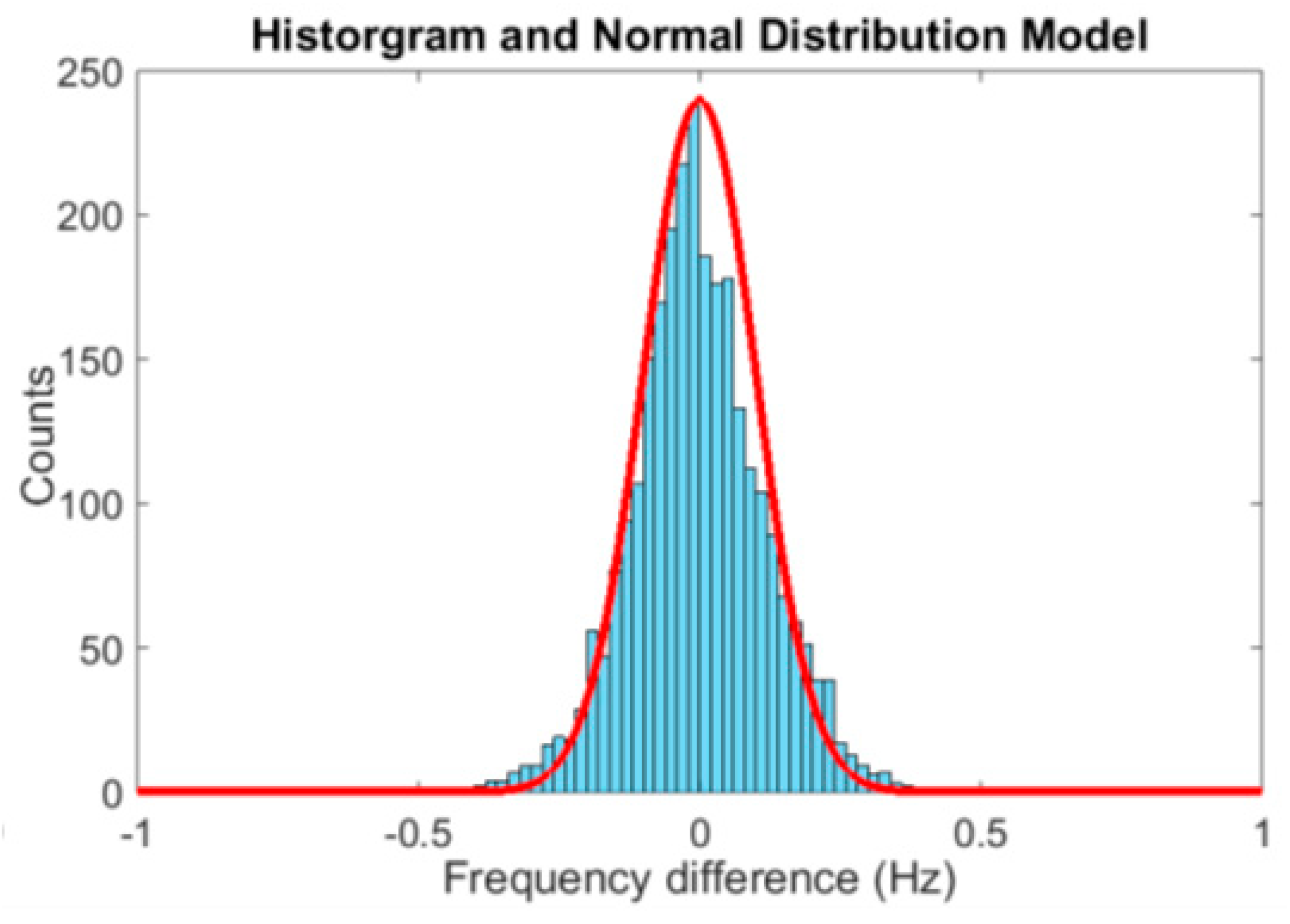
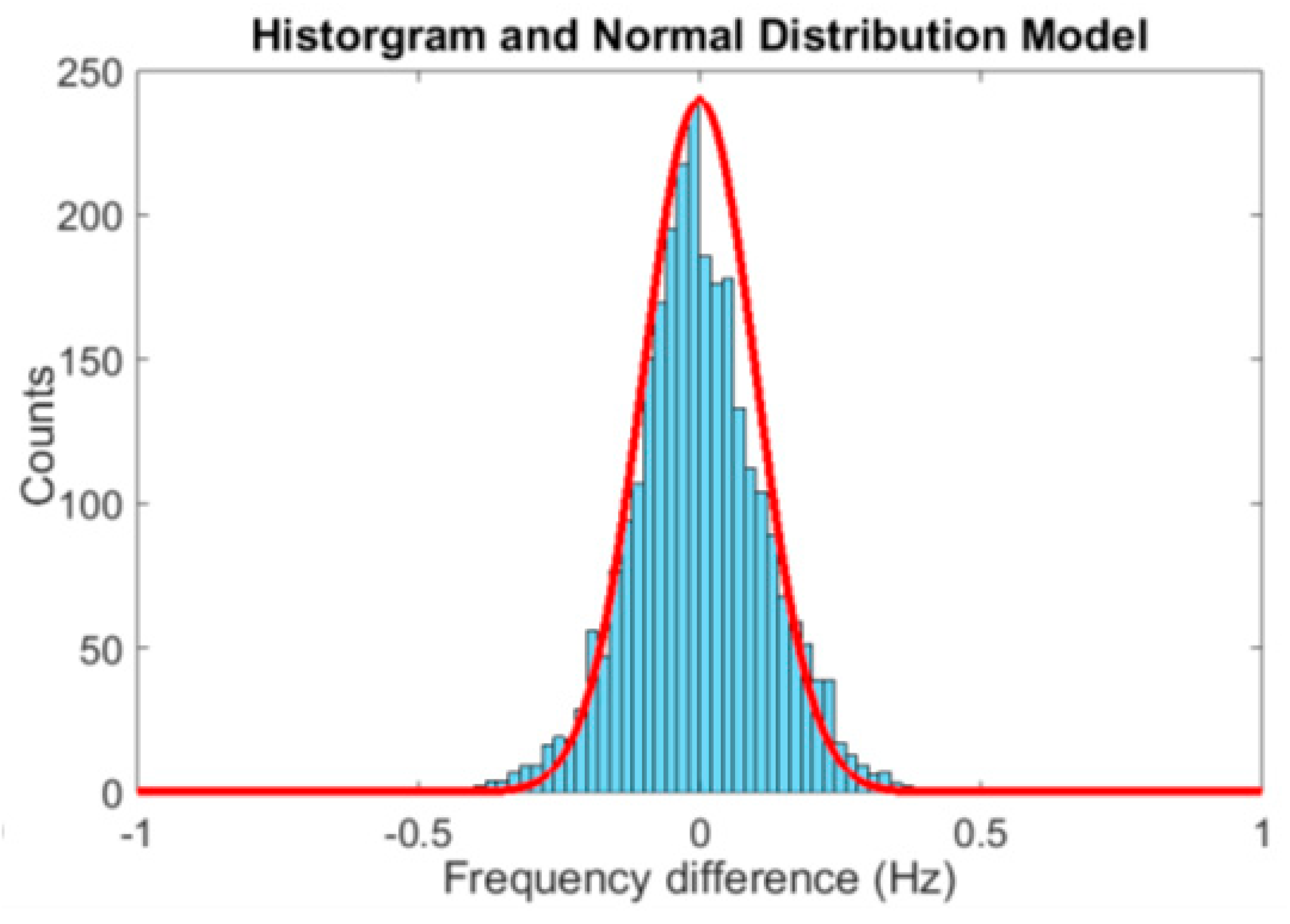
3.2.3. Heart Rate Changing Variation Distribution
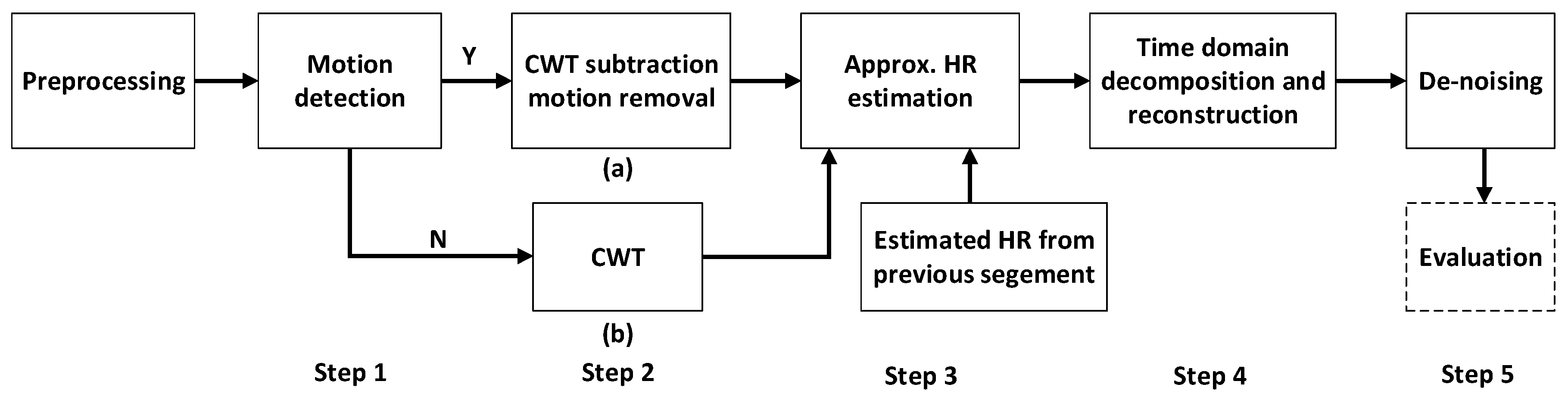
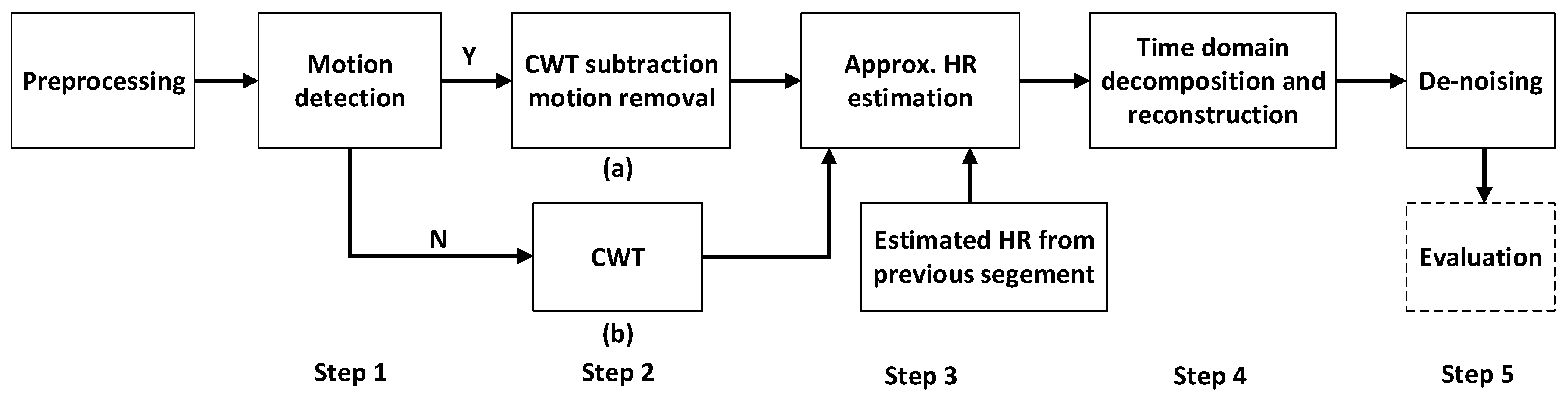
4. Proposed Algorithm Framework
4.1. Preprocessing and Motion Detection
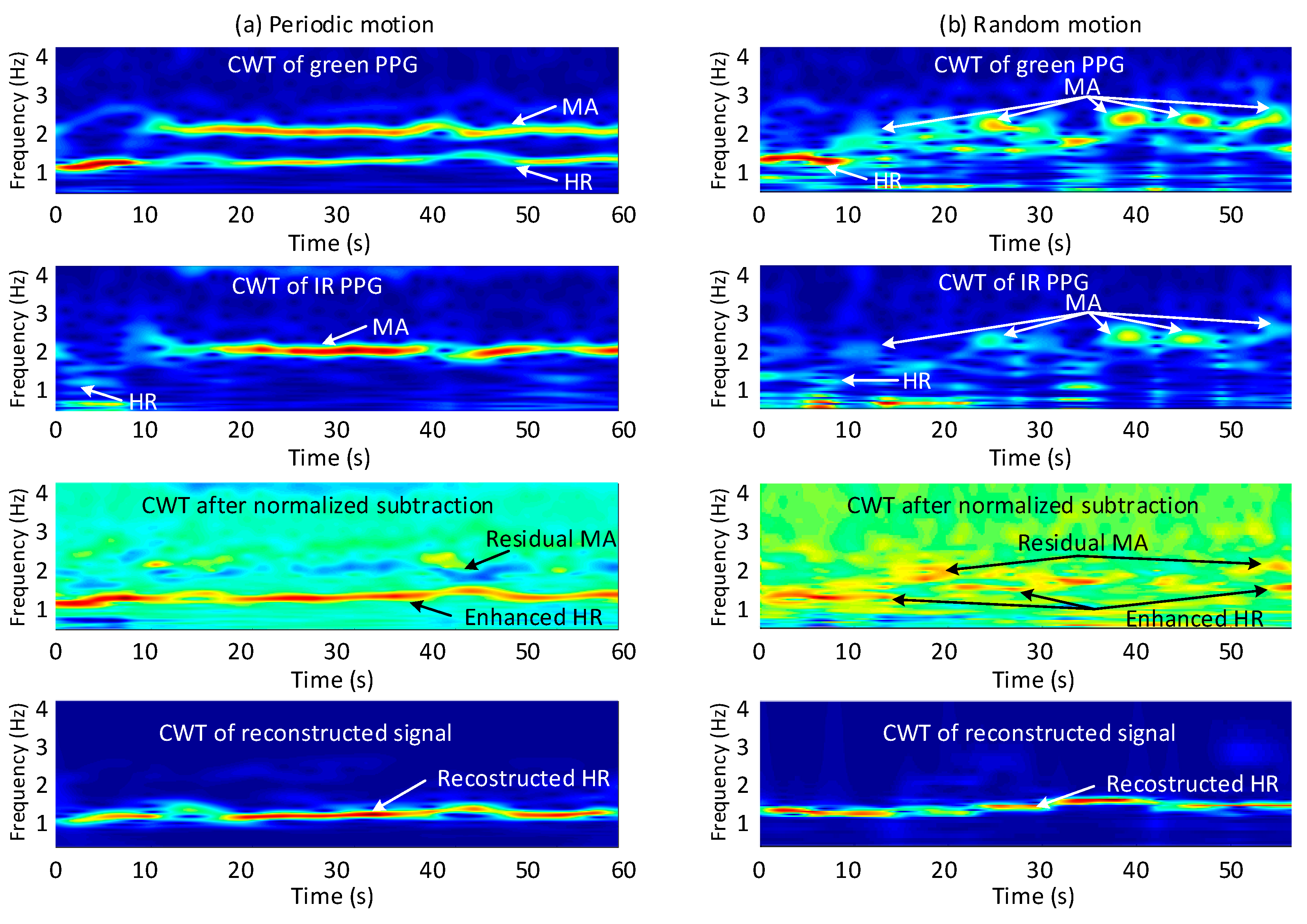
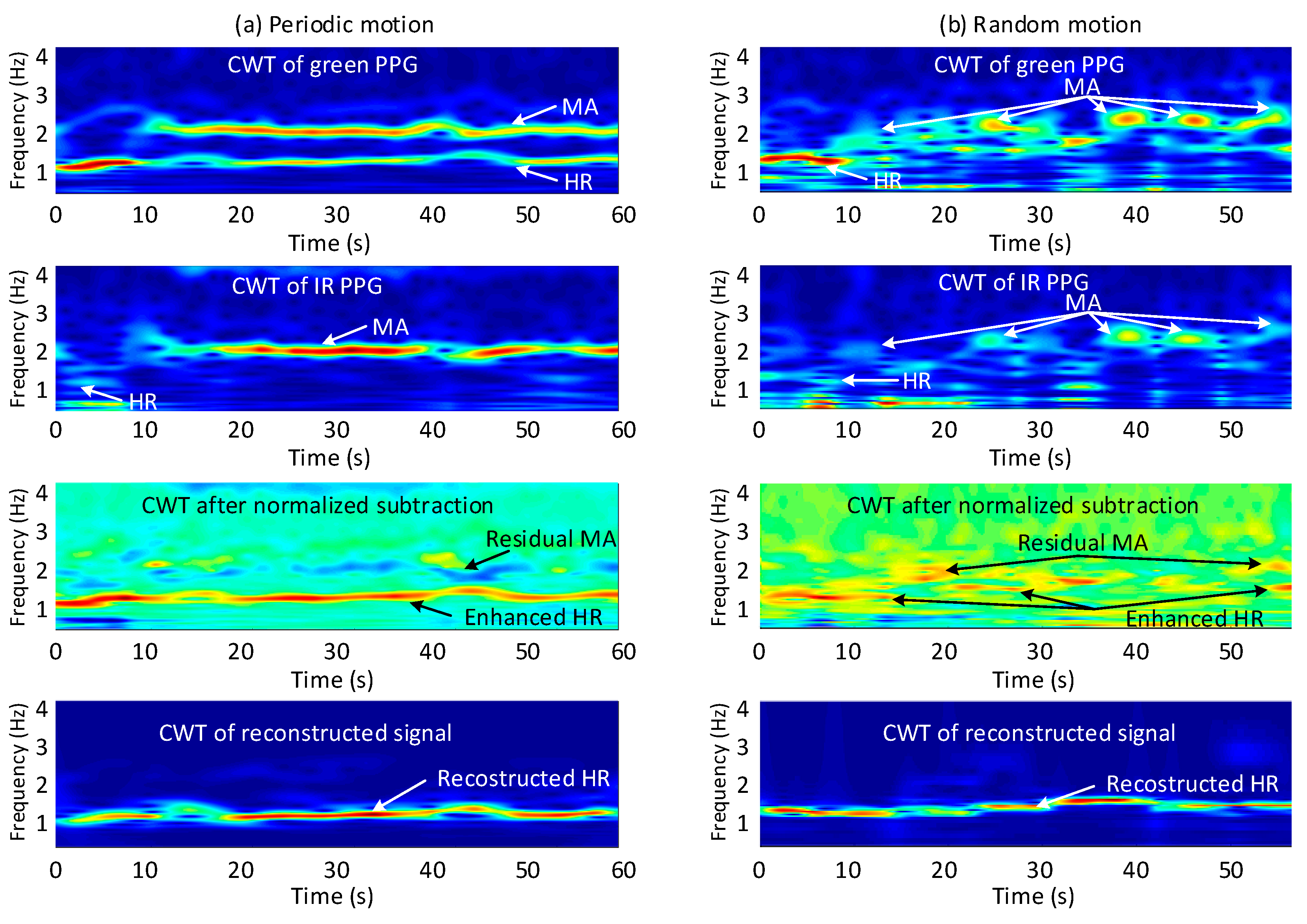
4.2. CWT-Based Motion Artifact Removal
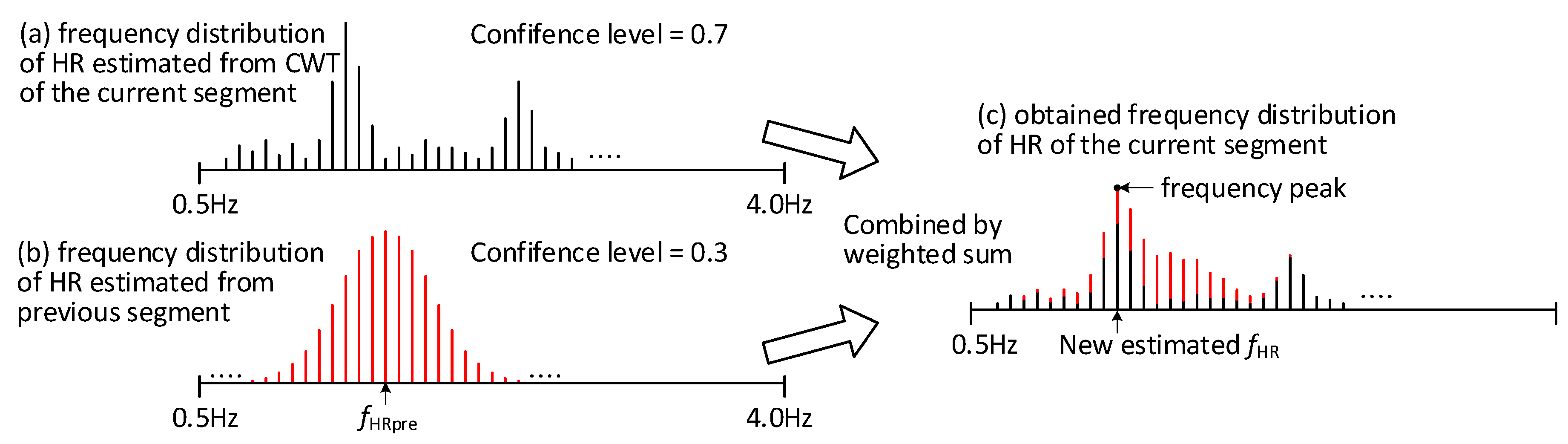
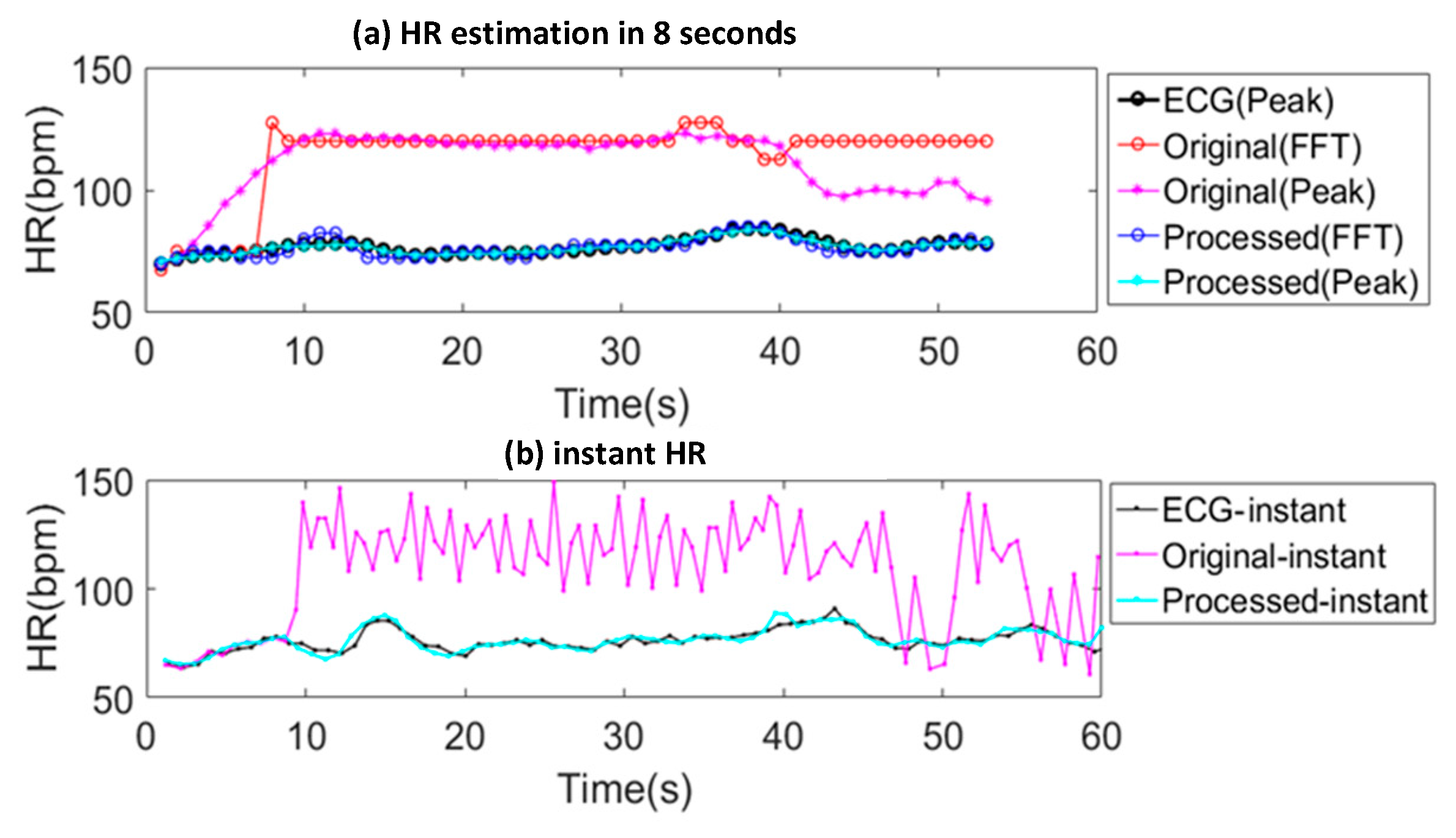
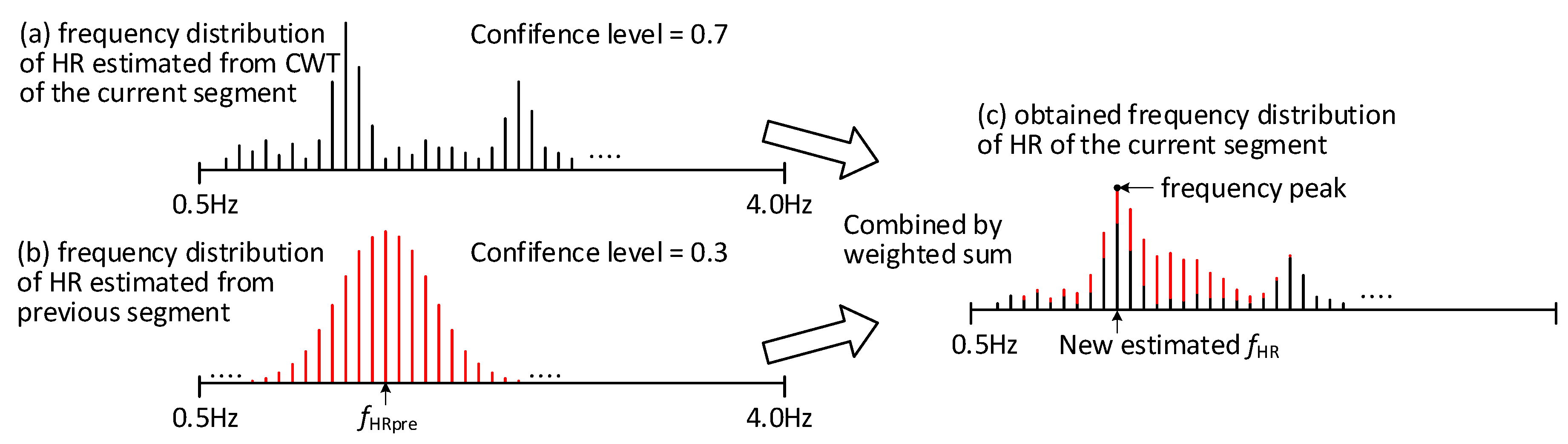
4.3. Approximate HR Estimation
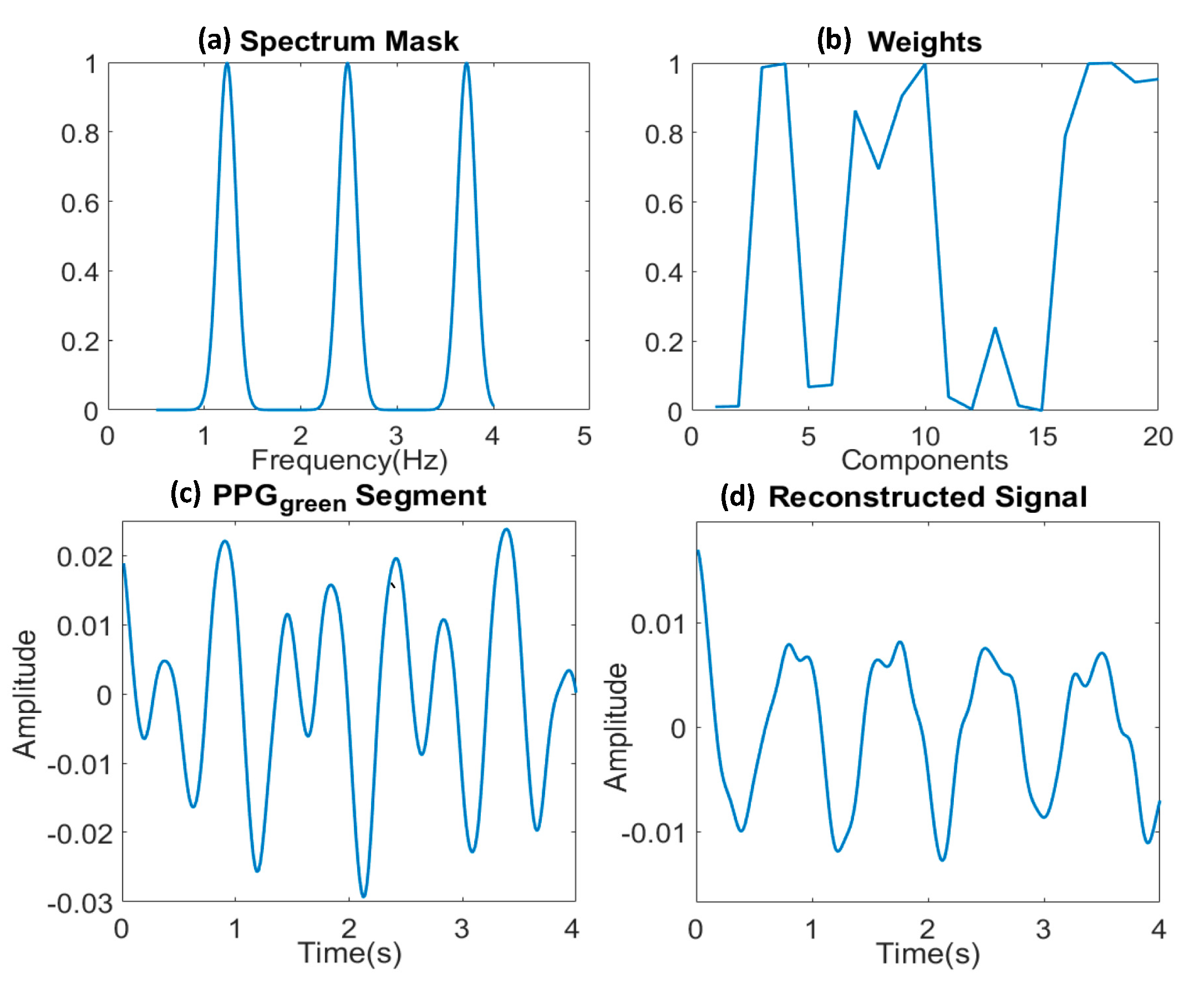
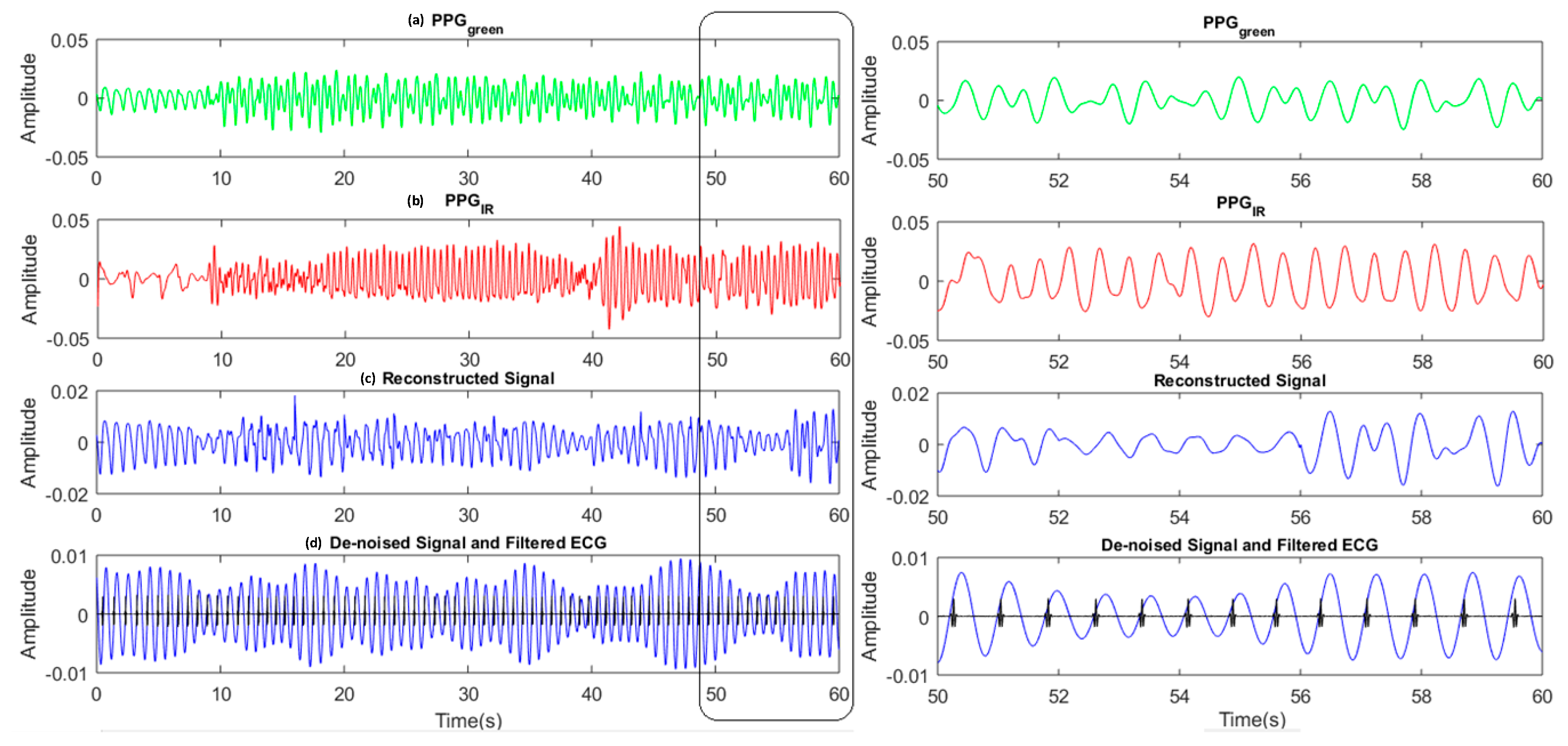
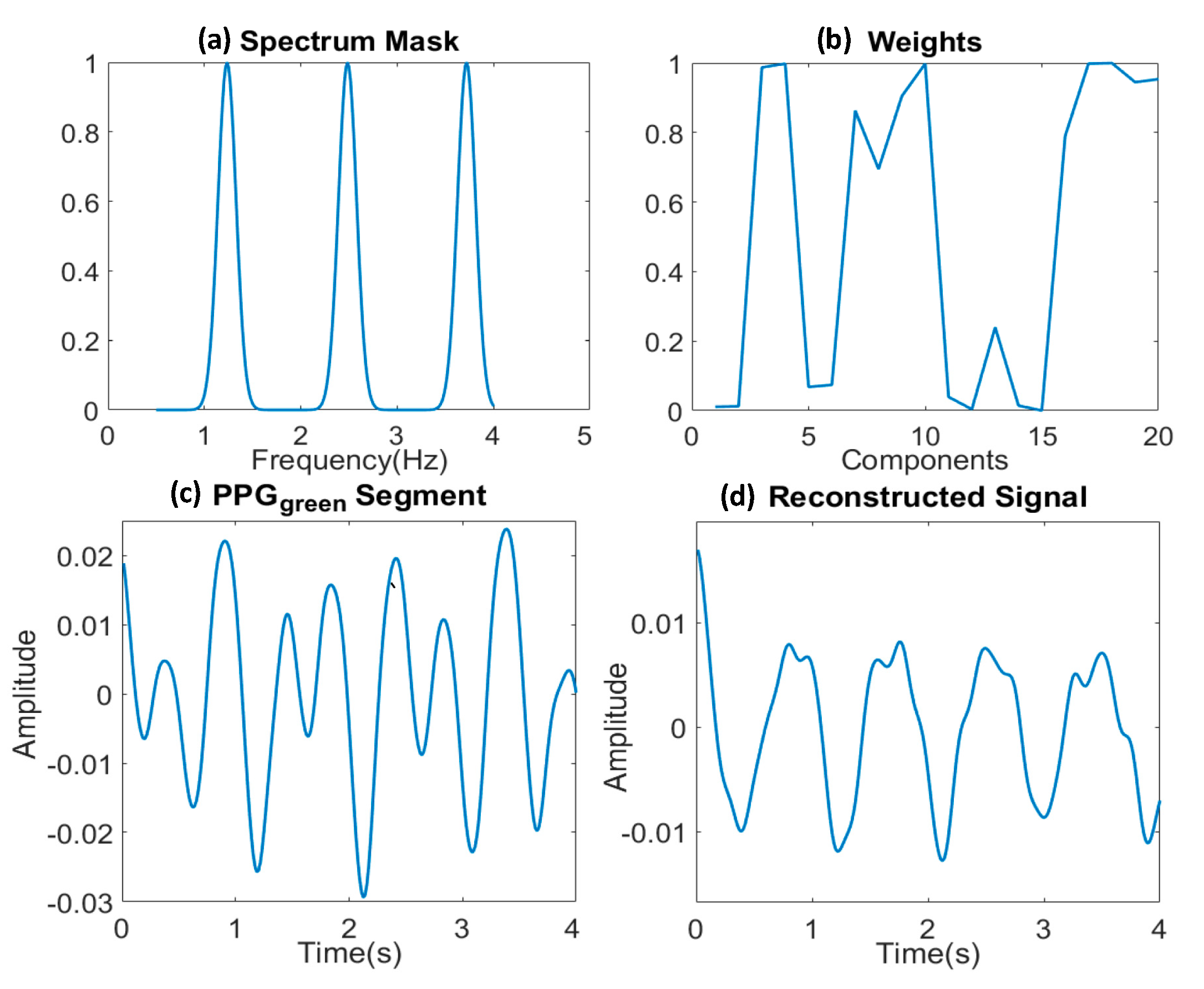
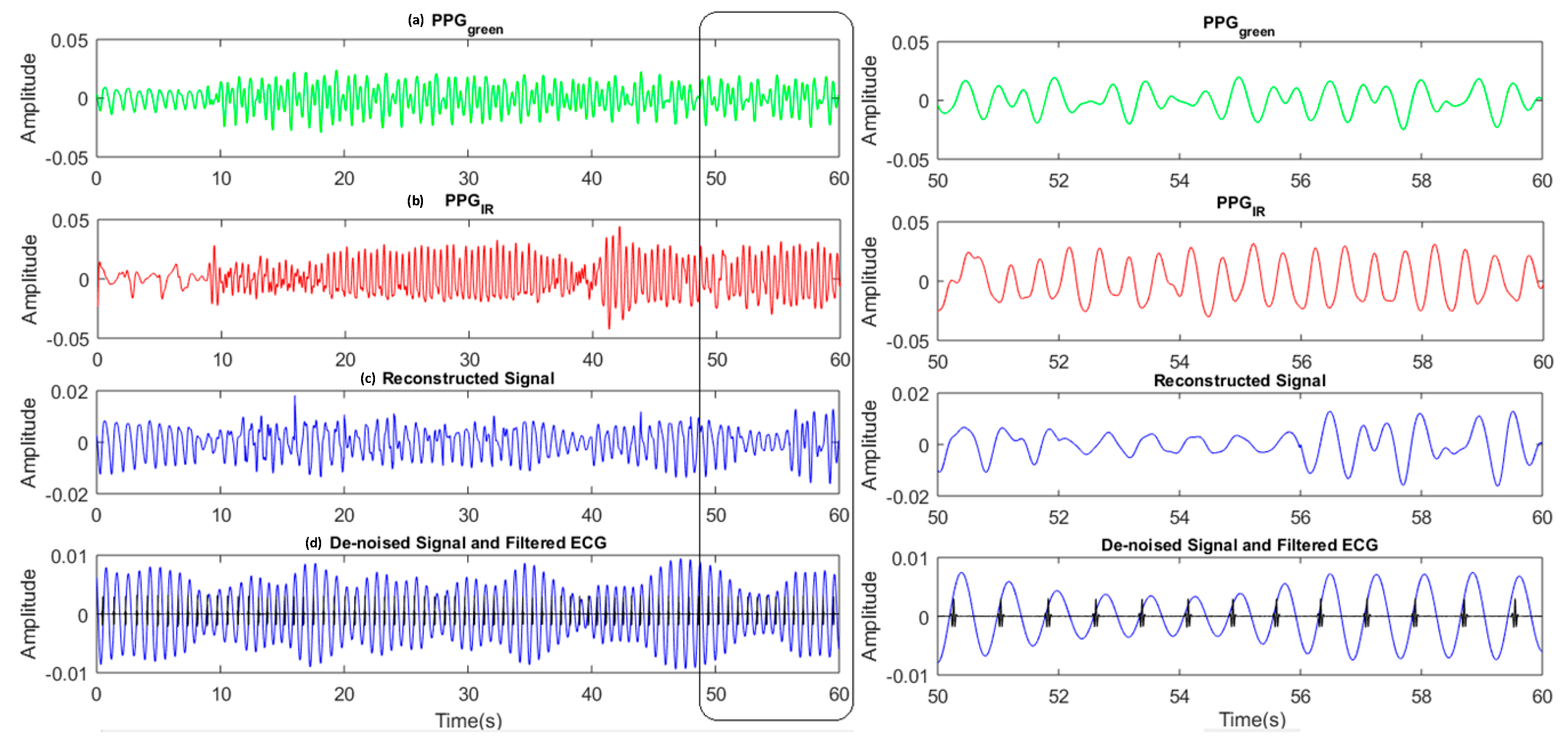
4.4. Signal Reconstruction
4.5. De-Noising
5. Results and Discussion
5.1. Evaluation and Performance Metrics
5.2. Results and Discussions
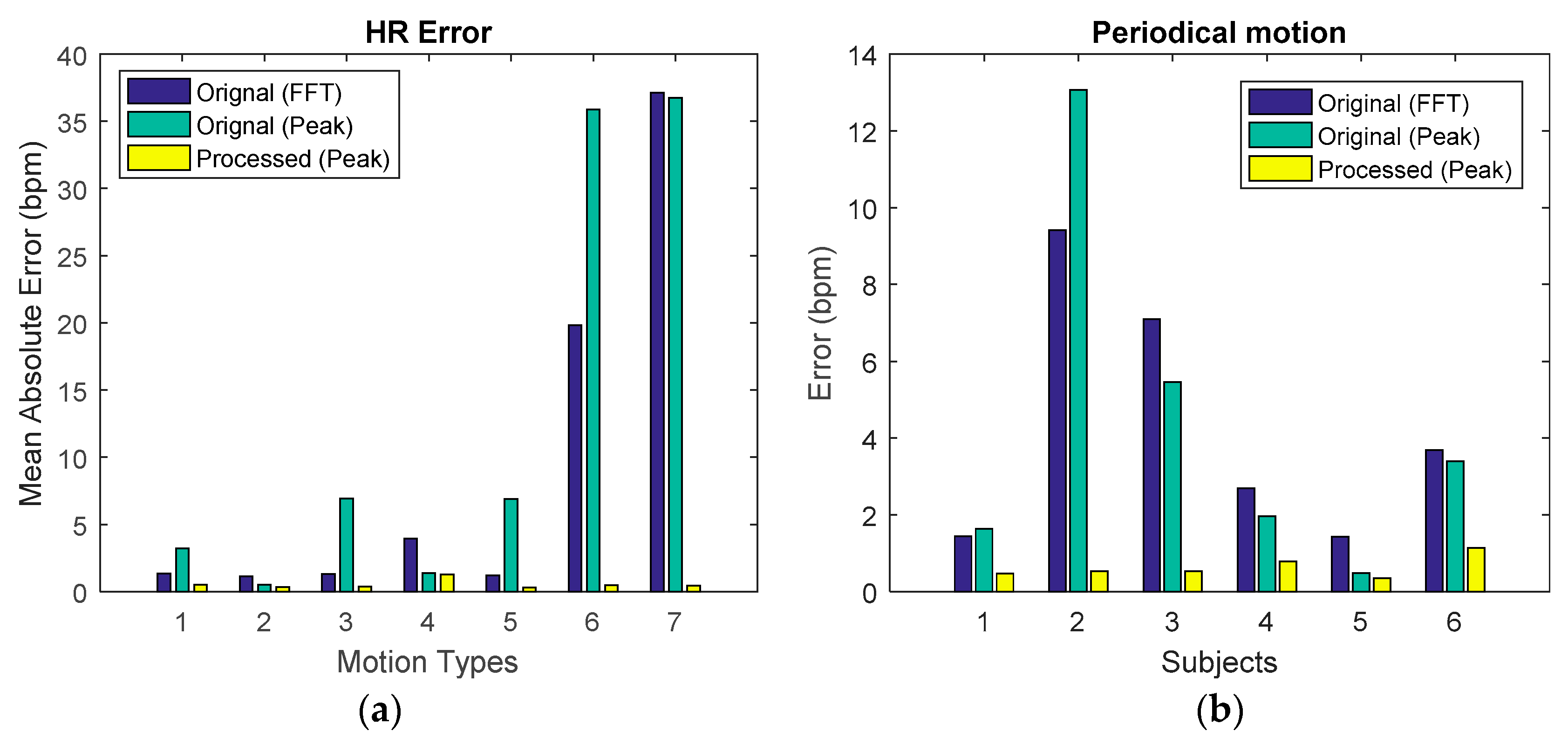
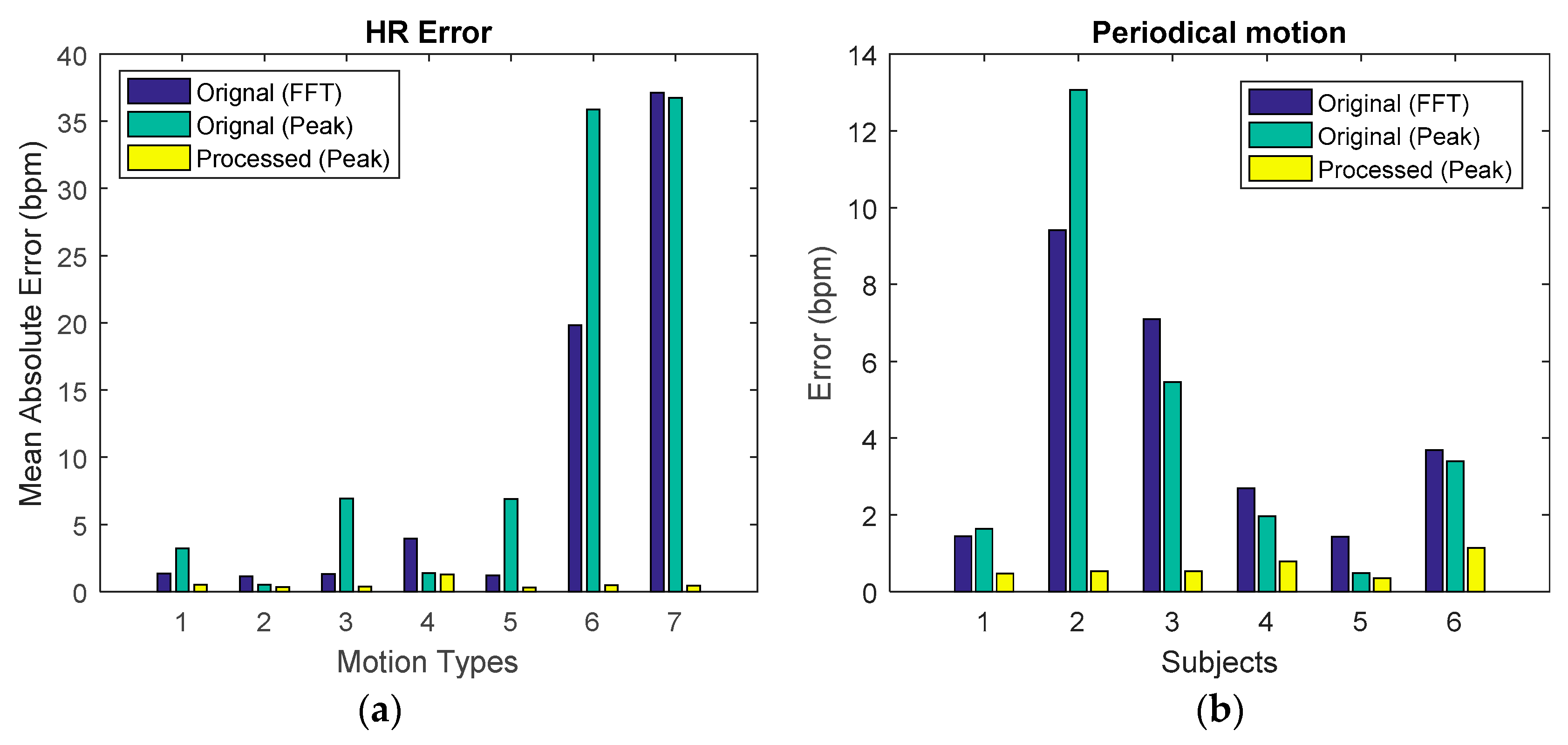
5.2.1. Periodic Motion
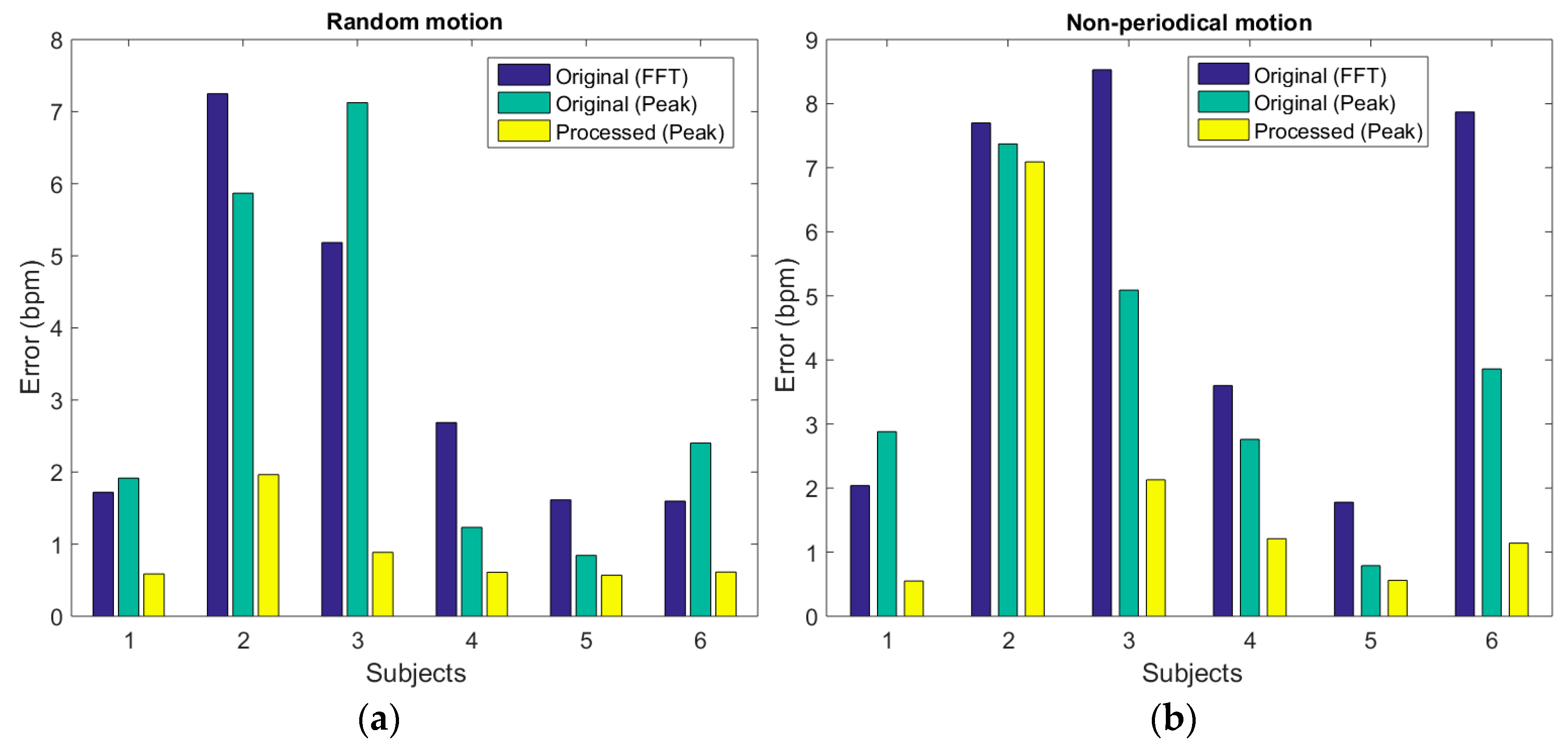
5.2.2. Random Motion
5.2.3. Continuous Non-Periodic Motion
5.3. Comparison with Other Methods and Internal Steps
6. Conclusions and Recommendations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sun, Y.; Thakor, N. Photoplethysmography revisited: from contact to noncontact, from point to imaging. IEEE Trans. Biomed. Eng. 2016, 63, 463–477. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Pi, Z.; Liu, B. TROIKA: A general framework for heart rate monitoring using wrist-type photoplethysmographic signals during intensive physical exercise. IEEE Trans. Biomed. Eng. 2015, 62, 522–531. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. Photoplethysmography-based heart rate monitoring in physical activities via joint sparse spectrum reconstruction. IEEE Trans. Biomed. Eng. 2015, 62, 1902–1910. [Google Scholar] [CrossRef] [PubMed]
- Tautan, A.M.; Young, A.; Wentink, E.; Wieringa, F. Characterization and reduction of motion artifacts in photoplethysmographic signals from a wrist-worn device. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Casson, A.J.; Galvez, A.V.; Jarchi, D. Gyroscope vs. accelerometer measurements of motion from wrist PPG during physical exercise. ICT Express 2016, 24, 175–179. [Google Scholar] [CrossRef]
- Jarchi, D.; Casson, A.J. Description of a database containing wrist PPG signals recorded during physical exercise with both accelerometer and gyroscope measures of motion. Data 2016, 2, 1. [Google Scholar] [CrossRef]
- Lee, H.; Chung, H.; Lee, J. Motion Artifact Cancellation in Wearable Photoplethysmography Using Gyroscope. IEEE Sens. J. 2019, 19, 1166–1175. [Google Scholar] [CrossRef]
- Geun, E.; Heo, H.; Nam, K.C.; Huh, Y. Measurement site and applied pressure consideration in wrist photoplethysmography. In Proceedings of the 23rd International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC 2008), Shimonoseki, Japan, 6–9 July 2008. [Google Scholar]
- Lee, H.; Ko, H.; Jeong, C.; Lee, J. Wearable photoplethysmographic sensor based on different LED light intensities. IEEE Sens. J. 2017, 17, 587–588. [Google Scholar] [CrossRef]
- Renevey, P.; Vetter, R.; Krauss, J.; Celka, P.; Depeursinge, Y. Wrist-located pulse detection using IR signals, activity and nonlinear artifact cancellation. In Proceedings of the 23rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Istanbul, Turkey, 25–28 October 2001. [Google Scholar]
- Vizbara, V. Comparison of green, blue and infrared light in wrist and forehead photoplethysmography. In Proceedings of the 20th International Conference of Biomedical Engineering, Kaunas, Lithuania, 24–25 November 2016. [Google Scholar]
- Matsumura, K.; Rolfe, P.; Lee, J.; Yamakoshi, T. iPhone 4s photoplethysmography: Which light color yields the most accurate heart rate and normalized pulse volume using the iphysiometer application in the presence of motion artifact? PLoS ONE 2014, 9. [Google Scholar] [CrossRef] [PubMed]
- OSRAM Opto Semiconductors, SFH 7060 Datasheet. Available online: www.osram-os.com (accessed on 17 March 2017).
- Lee, C.M.; Zhang, Y.T. Reduction of motion artifacts from photoplethysmographic recordings using a wavelet denoising approach. In Proceedings of the IEEE EMBS Asian-Pacific Conference on Biomedical Engineering, Kyoto, Japan, 20–22 October 2003. [Google Scholar]
- Yousefi, R.; Nourani, M.; Ostadabbas, S.; Panahi, I. A Motion-Tolerant Adaptive Algorithm for Wearable Photoplethysmographic Biosensors. IEEE J. Biomed. Health Inf. 2014, 18, 670–681. [Google Scholar] [CrossRef] [PubMed]
- Fallet, S.; Vesin, J.-M. Robust heart rate estimation using wrist-type photoplethysmographic signals during physical exercise: An approach based on adaptive filtering. Physiol. Meas. 2017, 38, 155–170. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, S.S.; Hyder, R.; Hafiz, M.S.B.; Haque, M.A. Real-Time Robust Heart Rate Estimation From Wrist-Type PPG Signals Using Multiple Reference Adaptive Noise Cancellation. IEEE J. Biomed. Health Inf. 2016, 22, 450–459. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Lo, B.P.; Yang, G.-Z. Multichannel reflective PPG earpiece sensor with passive motion cancellation. IEEE Trans. Biomed. Circuits Syst. 2007, 1, 235–241. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Chung, H.; Ko, H.; Lee, J. Wearable Multichannel Photoplethysmography Framework for Heart Rate Monitoring During Intensive Exercise. IEEE Sens. J. 2018, 18, 2983–2993. [Google Scholar] [CrossRef]
- Ye, Y.; He, W.; Cheng, Y.; Huang, W.; Zhang, Z. A Robust Random Forest-Based Approach for Heart Rate Monitoring Using Photoplethysmography Signal Contaminated by Intense Motion Artifacts. Sensors 2017, 17, 385. [Google Scholar] [CrossRef] [PubMed]
- Ram, M.R.; Madhav, K.V.; Krishna, E.H.; Komalla, N.R.; Reddy, K.A. A novel approach for motion artifact reduction in PPG signals based on AS-LMS adaptive filter. IEEE Trans. Instrum. Meas. 2012, 61, 1445–1457. [Google Scholar] [CrossRef]
- Wijshoff, R. On photoplethysmography artifact reduction and applications. PhD. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 6 September 2016. [Google Scholar]
- Salehizadeh, S.M.A. Motion and Noise Artifact Detection and Vital Signal Reconstruction in ECG/PPG based Wearable Devices. Ph.D. Thesis, University of Connecticut, Storrs, CT, USA, 16 December 2015. [Google Scholar]
- Temko, A. Estimation of heart rate from photoplethysmography during physical exercise using wiener filtering and the phase vocoder. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Naraharisetti, K.V.P.; Bawa, M.; Tahernezhadi, M. Comparison of different signal processing methods for reducing artifacts from photoplethysmograph signal. In Proceedings of the IEEE international conference on electro/information technology, Mankato, MN, USA, 15–17 May 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method type | Motion Detection | Method Name | Periodic | Random | Cont. Non-Periodic | |
|---|---|---|---|---|---|---|
| Preprocessing | No | FFT | 4.3 ± 3.3 | 3.3 ± 2.4 | 5.3 ± 3.1 | |
| Peak detection | 4.3 ± 4.6 | 3.0 ± 2.3 | 3.8 ± 2.3 | |||
| Existing motion artifacts removal methods | Motion reference | No | AdfMAR | 4.5 ± 2.6 | 3.7 ± 1.7 | 3.2 ± 1.4 |
| TraMAR | 3.8 ± 3.4 | - | - | |||
| Yes | CAdfMAR | 2.8 ± 2.5 | 2.8 ± 2.2 | 3.0 ± 1.5 | ||
| CTraMAR | 3.4 ± 3.5 | - | - | |||
| Multichannel PPG | N.A. | IdsSE | 4.7 ± 1.9 | 4.1 ± 0.8 | 4.6 ± 2.1 | |
| Proposed framework | With bandpass filter | Yes | BpfSE | 0.9 ± 0.3 | 1.4 ± 1.0 | 2.8 ± 3.0 |
| Original | Yes | Proposed | 0.6 ± 0.3 | 0.9 ± 0.6 | 2.1 ± 2.5 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Song, S.; Vullings, R.; Biswas, D.; Simões-Capela, N.; van Helleputte, N.; van Hoof, C.; Groenendaal, W. Motion Artifact Reduction for Wrist-Worn Photoplethysmograph Sensors Based on Different Wavelengths. Sensors 2019, 19, 673. https://doi.org/10.3390/s19030673
Zhang Y, Song S, Vullings R, Biswas D, Simões-Capela N, van Helleputte N, van Hoof C, Groenendaal W. Motion Artifact Reduction for Wrist-Worn Photoplethysmograph Sensors Based on Different Wavelengths. Sensors. 2019; 19(3):673. https://doi.org/10.3390/s19030673
Chicago/Turabian StyleZhang, Yifan, Shuang Song, Rik Vullings, Dwaipayan Biswas, Neide Simões-Capela, Nick van Helleputte, Chris van Hoof, and Willemijn Groenendaal. 2019. "Motion Artifact Reduction for Wrist-Worn Photoplethysmograph Sensors Based on Different Wavelengths" Sensors 19, no. 3: 673. https://doi.org/10.3390/s19030673
APA StyleZhang, Y., Song, S., Vullings, R., Biswas, D., Simões-Capela, N., van Helleputte, N., van Hoof, C., & Groenendaal, W. (2019). Motion Artifact Reduction for Wrist-Worn Photoplethysmograph Sensors Based on Different Wavelengths. Sensors, 19(3), 673. https://doi.org/10.3390/s19030673