Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers

 ,
,  ,
, 
Abstract
1. Introduction
- 1.
- 2.
- Metal walls: through-metal-wall data transmission is crucial for conveying information from within the interior of hermetical containers [32,33,34,35,36]. Stress wave communication is also one of the main techniques being investigated to achieve through-metal-wall data transmission [37,38]. Researchers modulated stress waves with different schemes, such as differential binary phase shift keying (DBPSK) and pulse amplitude modulation (PAM), to achieve through-metal-wall data transmission under different configurations [39,40].
- 3.
- Pipeline structures: stress wave communication is applied on pipeline structures to achieve data transmission along the pipeline. For example, in a well drilling string, it is critical to obtain the measurements from the bottom of borehole in order to navigate the drilling path. However, as traditional wired communication suffers from practical difficulties such as cable installation and infrastructure adjustment when drilling string sections are added or removed, wireless communication is widely utilized in logging while drilling (LWD) [41]. In the development of stress wave-based LWD wireless communication, the drilling string, which consists of metal pipes and joints, is considered as a conduit for the propagation of information-carrying stress wave [2,42,43,44,45,46]. Compared to the conventional mud pulse telemetry in LWD, stress wave data transmission is less susceptible to the properties of the fluids in the borehole. Meanwhile, stress wave communication is more suitable for underbalanced drilling (UBD) than in mud pulse telemetry or in electromagnetic telemetry [43]. The successful implementation of orthogonal frequency multiplexing (OFDM) based acoustic borehole communication demonstrated the feasibility of stress wave communication through pipeline structures [47,48]. Additionally, other than stress wave-based damage detection and structural health monitoring (SHM) on pipelines [49,50,51], Jin et al. applied stress waves as carriers to transmit information along a steel pipe. Their method was based on time-reversal pulse position modulation (TR-PPM) scheme [52,53]. Furthermore, Trane et al. developed a method for PPM-based communication; however, this method should be applied for communication based on the special multi-wire cables [54,55,56]. Chakraborty et al. proposed an approach to data transmission along a cylindrical pipe [57]. In their work, a simple modulation scheme chirp-on-off keying (Chirp-OOK) is applied, where the bit ‘1’ is represented by a chirp signal with selected frequencies and the bit ‘0’ is represented by a null signal [57,58]. With the implementation of a low-power hardware system, data transmission was successfully achieved. However, due to the effect of channel frequency selectivity [58], the available frequencies for chirp-signals in Chirp-OOK varies with the channels. Additionally, Moll et al. investigated the potential of phase-modulated signals conveying information in a planar waveguide with dispersion compensation based on the guided-wave modes group velocity [59]. A field experiment conducted on a buried water-filled pipe also verified the feasibility of data transmission through an actual pipe [60]. According to the characteristics of a stress wave propagating along a cylindrical pipe, the signal attenuation can undergo steep change with a slight frequency deviation. Thus, PPM is an appropriate modulation scheme for stress wave communication along pipeline structures, since there is no need to consider the available and suitable signal frequency ranges and the waveform refocusing method is verified to be useful to combat the dispersion.
- 1.
- To realize stress wave communication, the system integrates PPM modulation circuit and an amplifier to a stress wave generator that can produce high-voltage, modulated, information-containing waveforms.
- 2.
- To eliminate the need of an installing device, a new piezoceramic transducer can transmit stress waves through a simple contact with a pipe surface.
- 3.
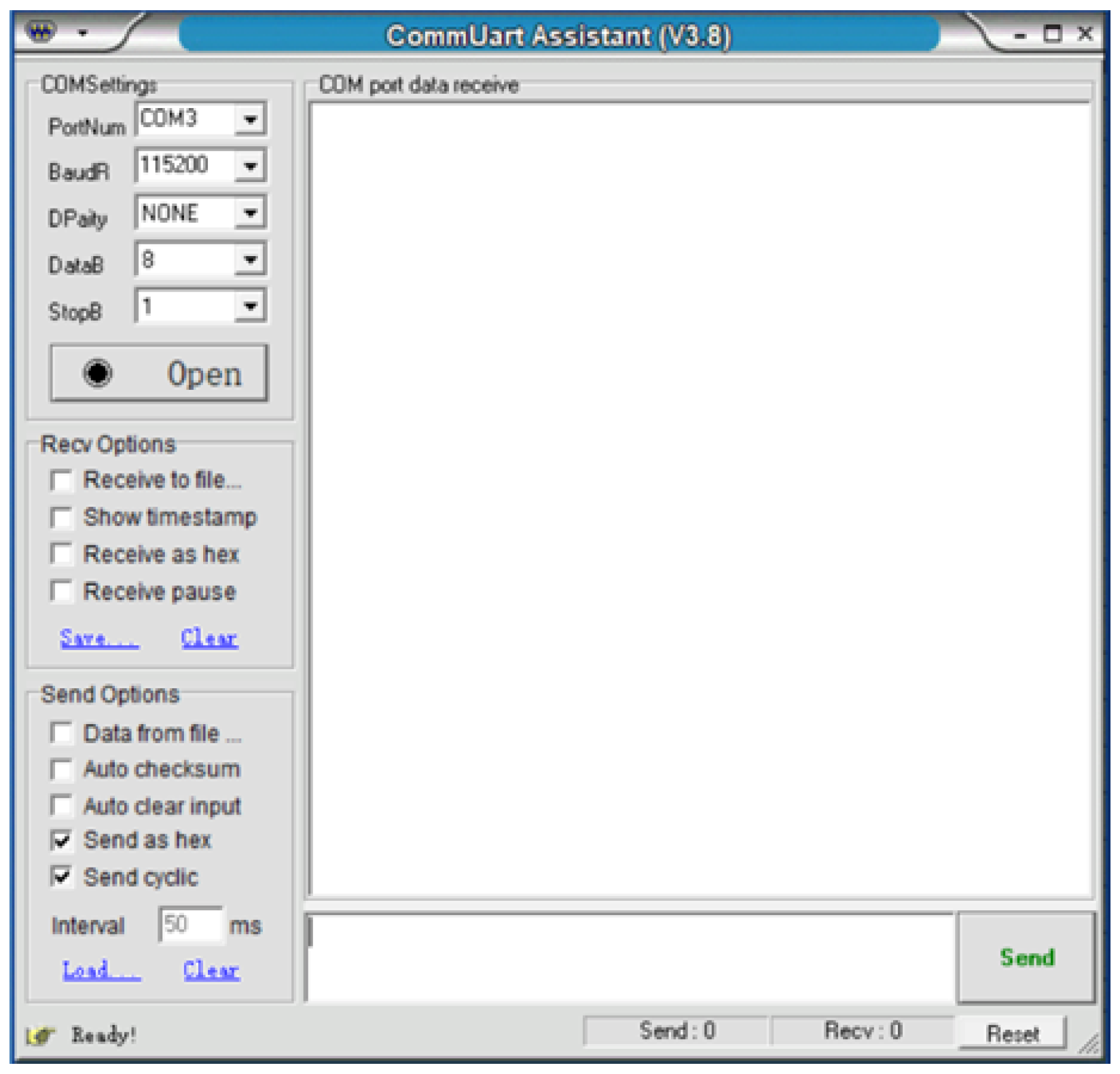
- For the convenience of the end users, an easy-to-use user interface has been designed and implemented. End users can control the data to be transmitted through this easy-to-use interface.
2. Principle of Stress Wave-Based Pulse Position Modulation (PPM) Communication
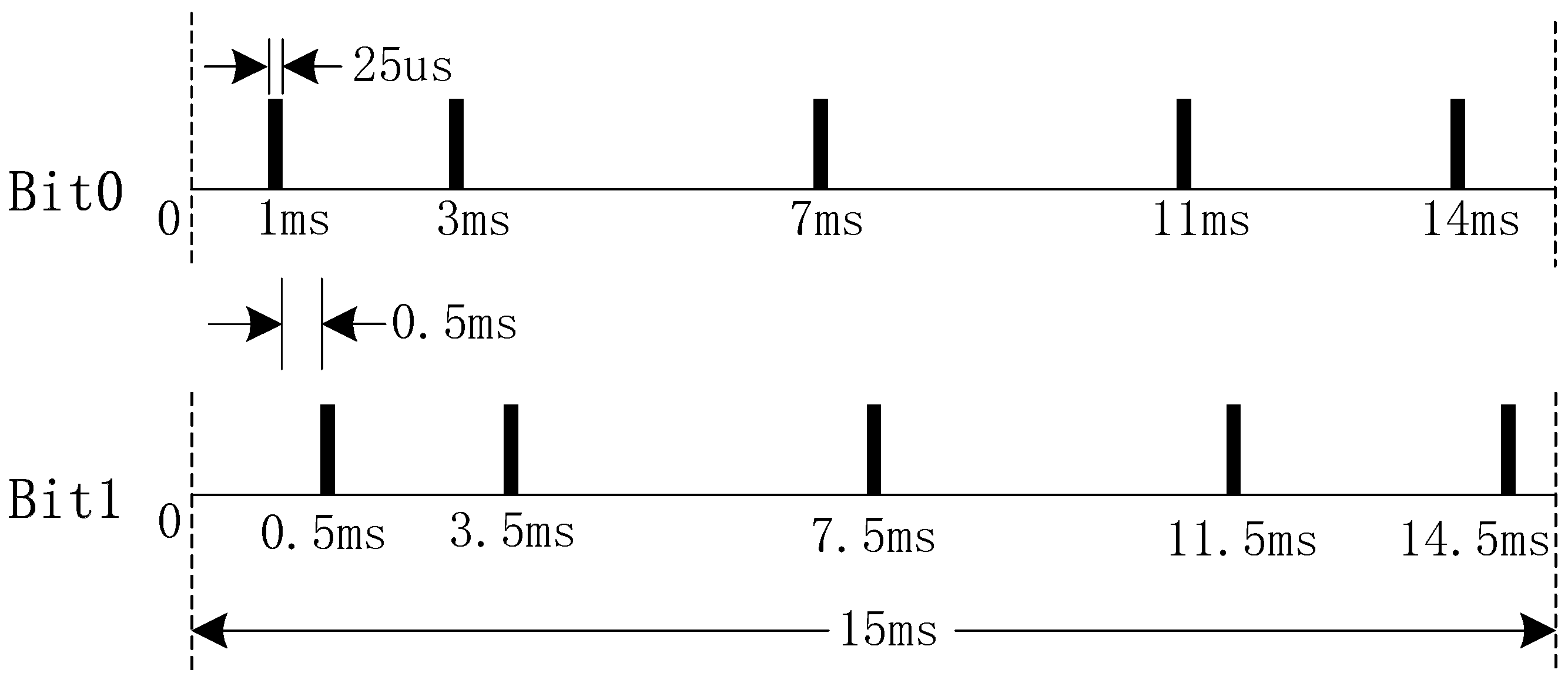
2.1. Principle of Stress Wave-Based PPM Communication
2.2. Refocusing Principle
3. Design of the Stress Wave-Based Communication System
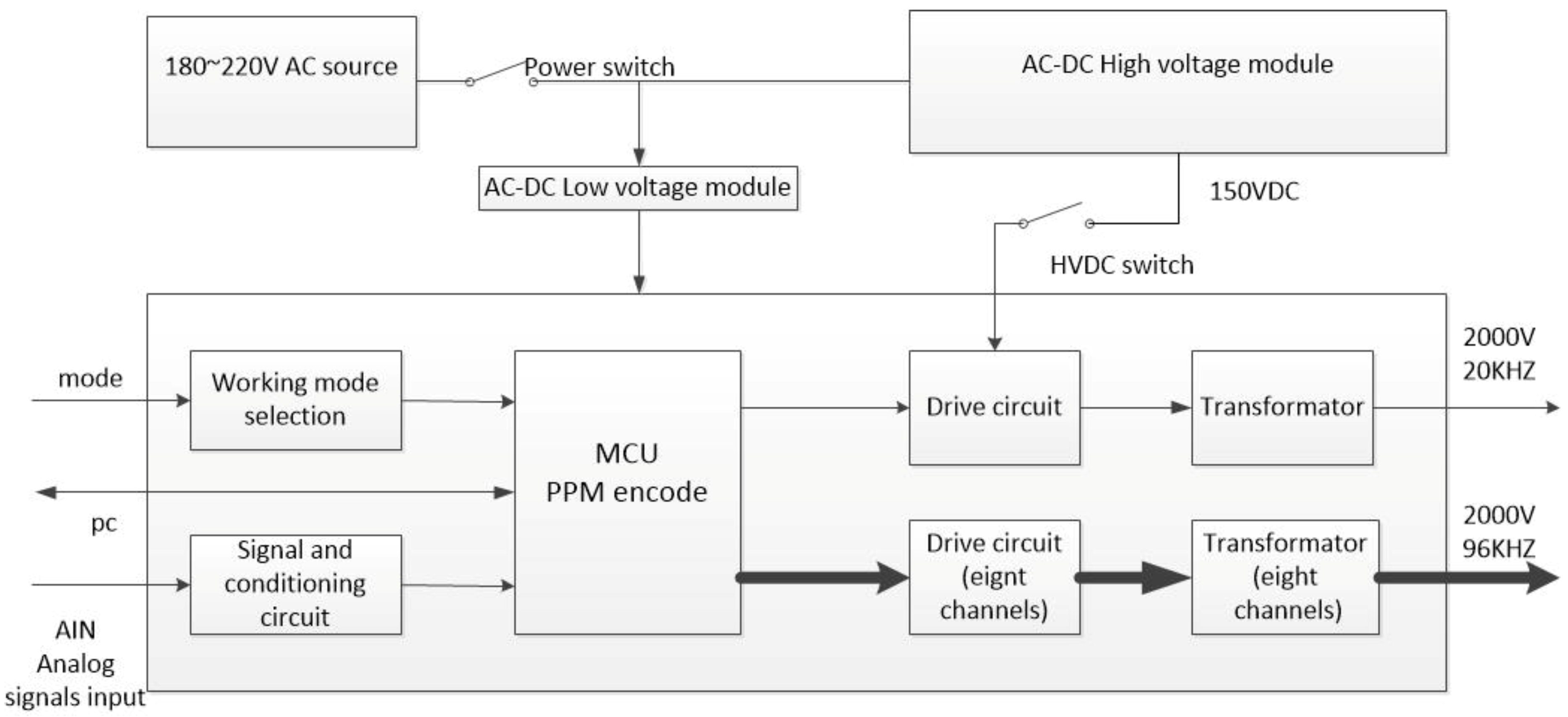
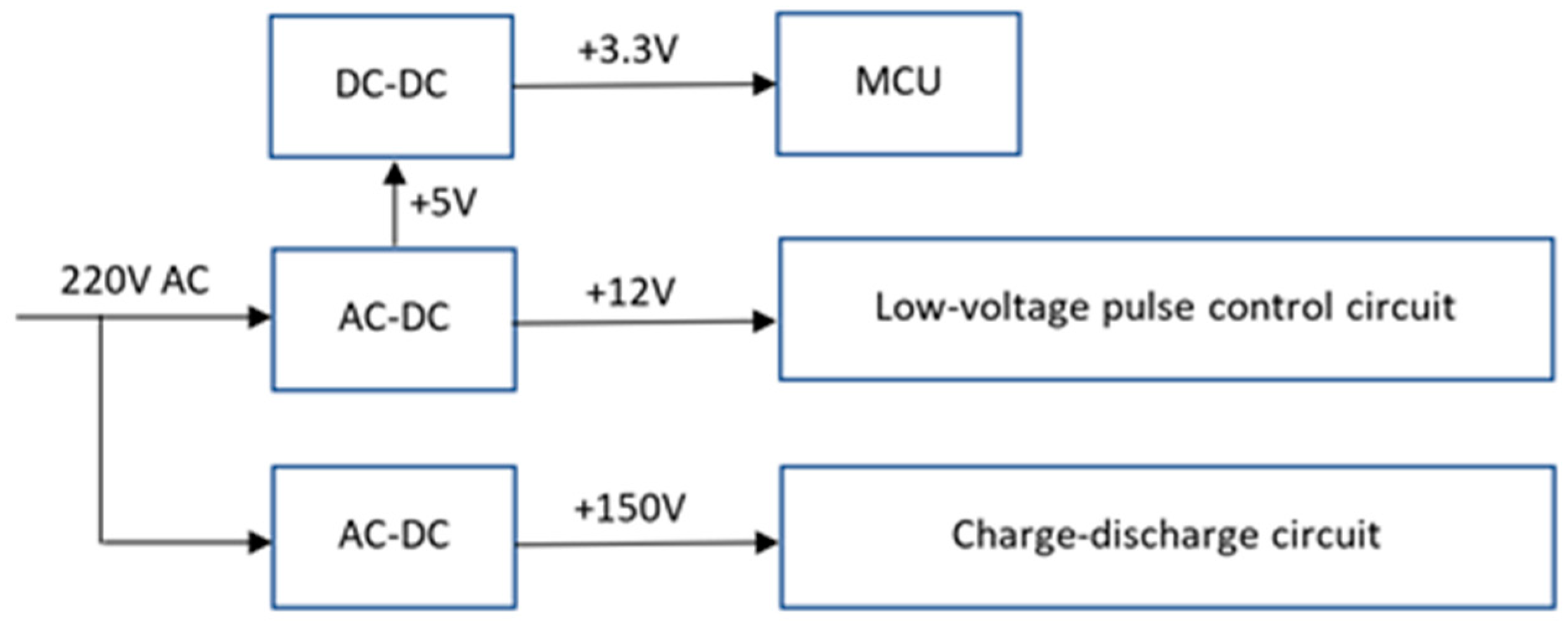
3.1. System Architecture Design
3.2. Hardware Design
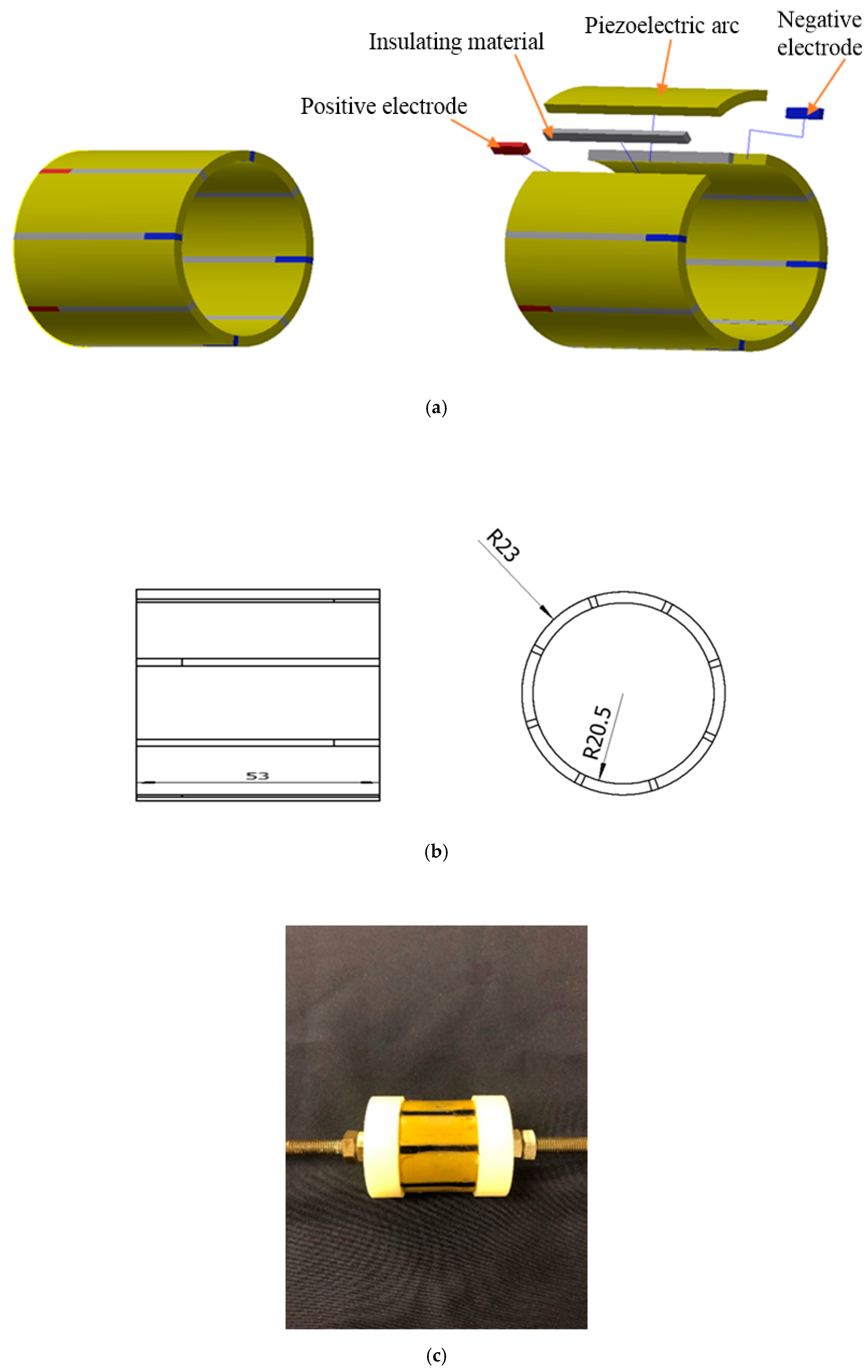
3.2.1. Piezoceramic Transducer Design
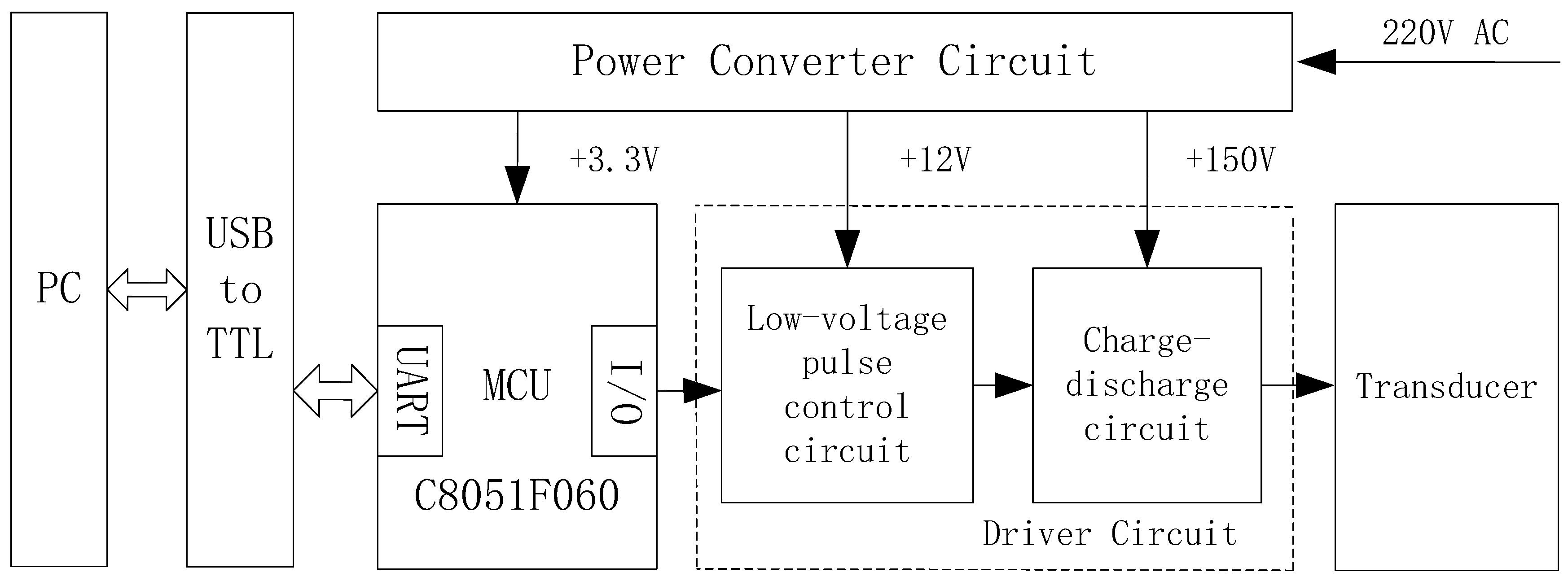
3.2.2. PPM Signal Generator Design
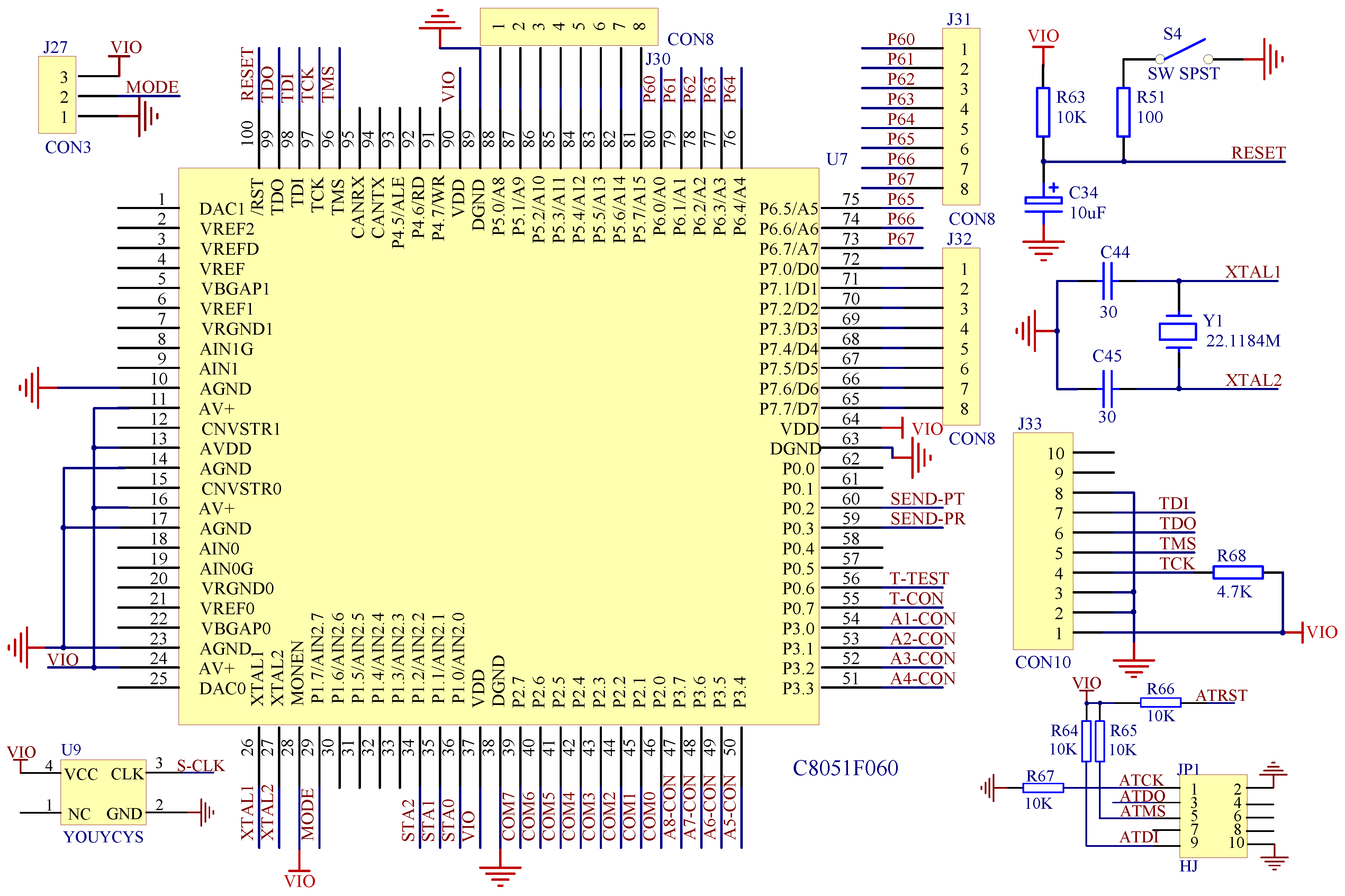
Microcontroller Unit (MCU) Selection
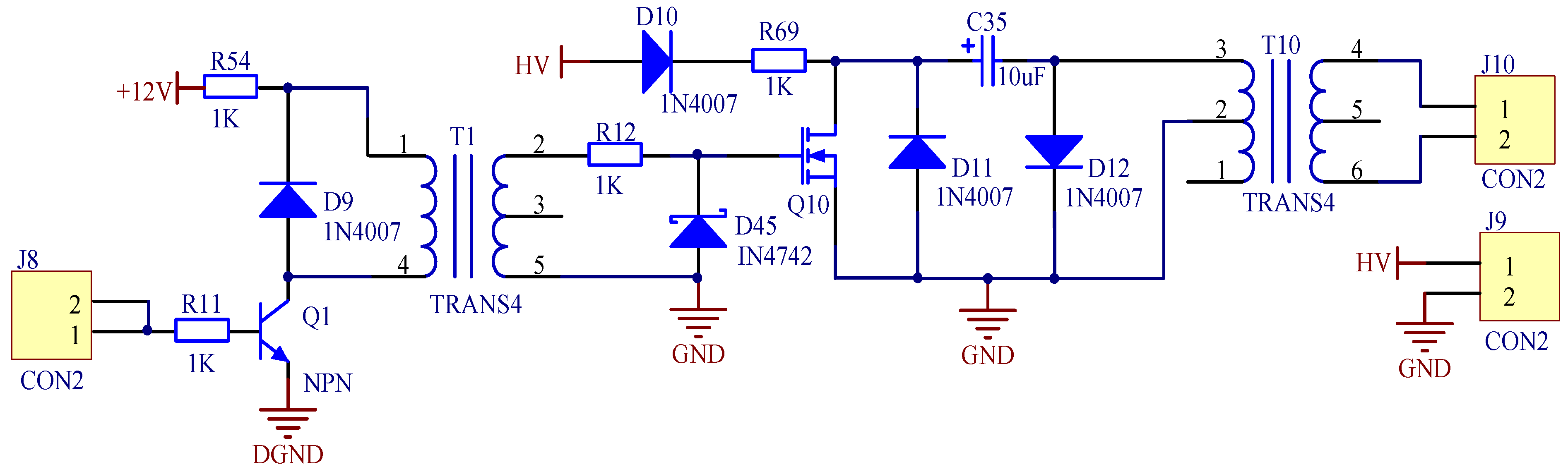
Driver Circuit Design
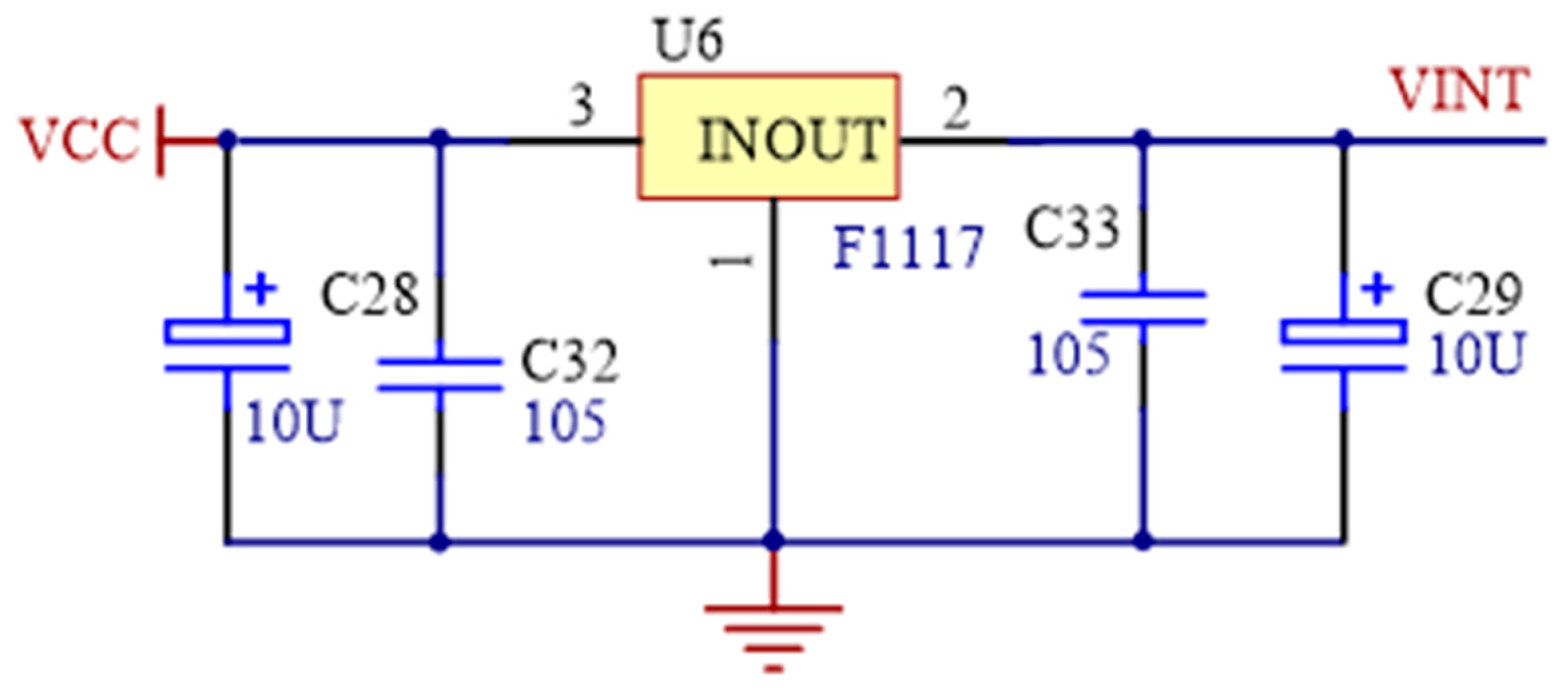
Power Converter Circuit Design
3.3. Software Design
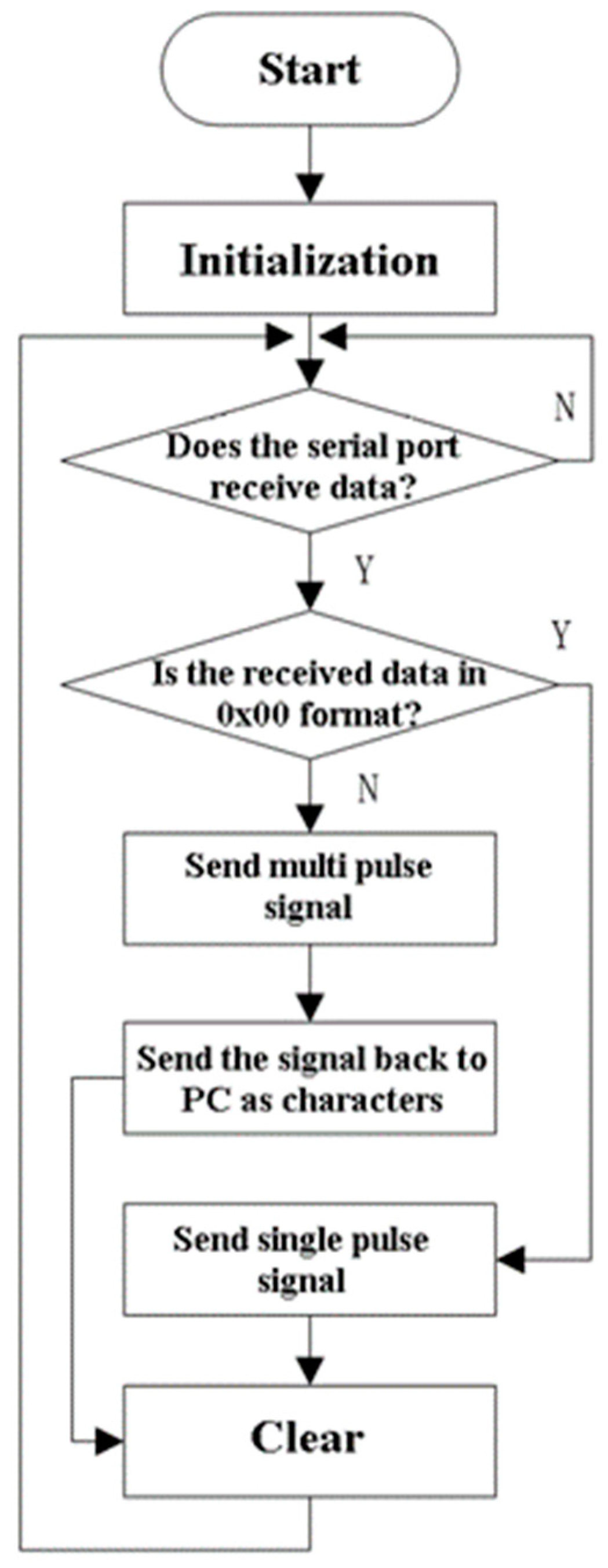
3.3.1. Main Program
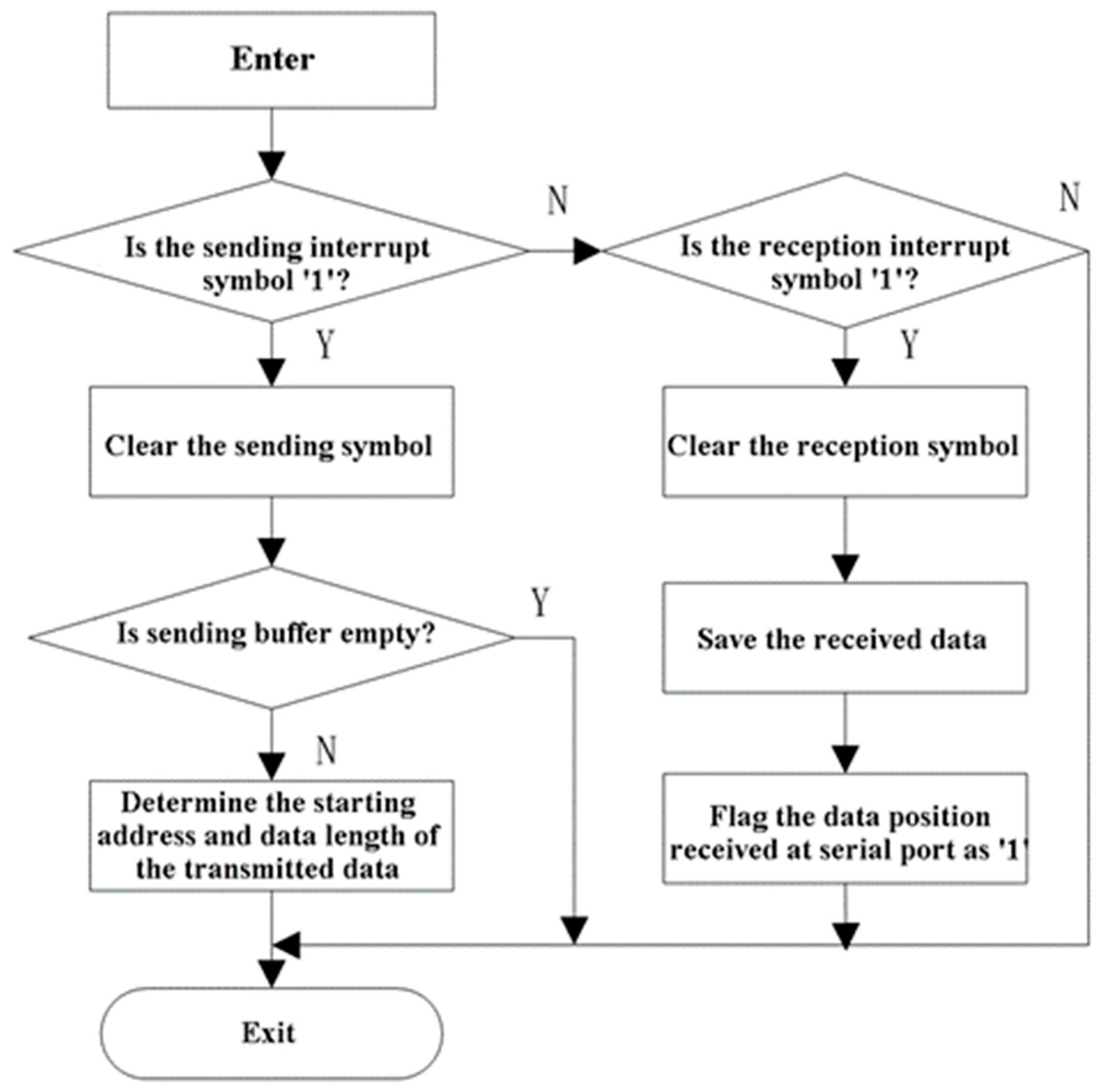
3.3.2. Serial Interrupt Program
4. Experimental Verification
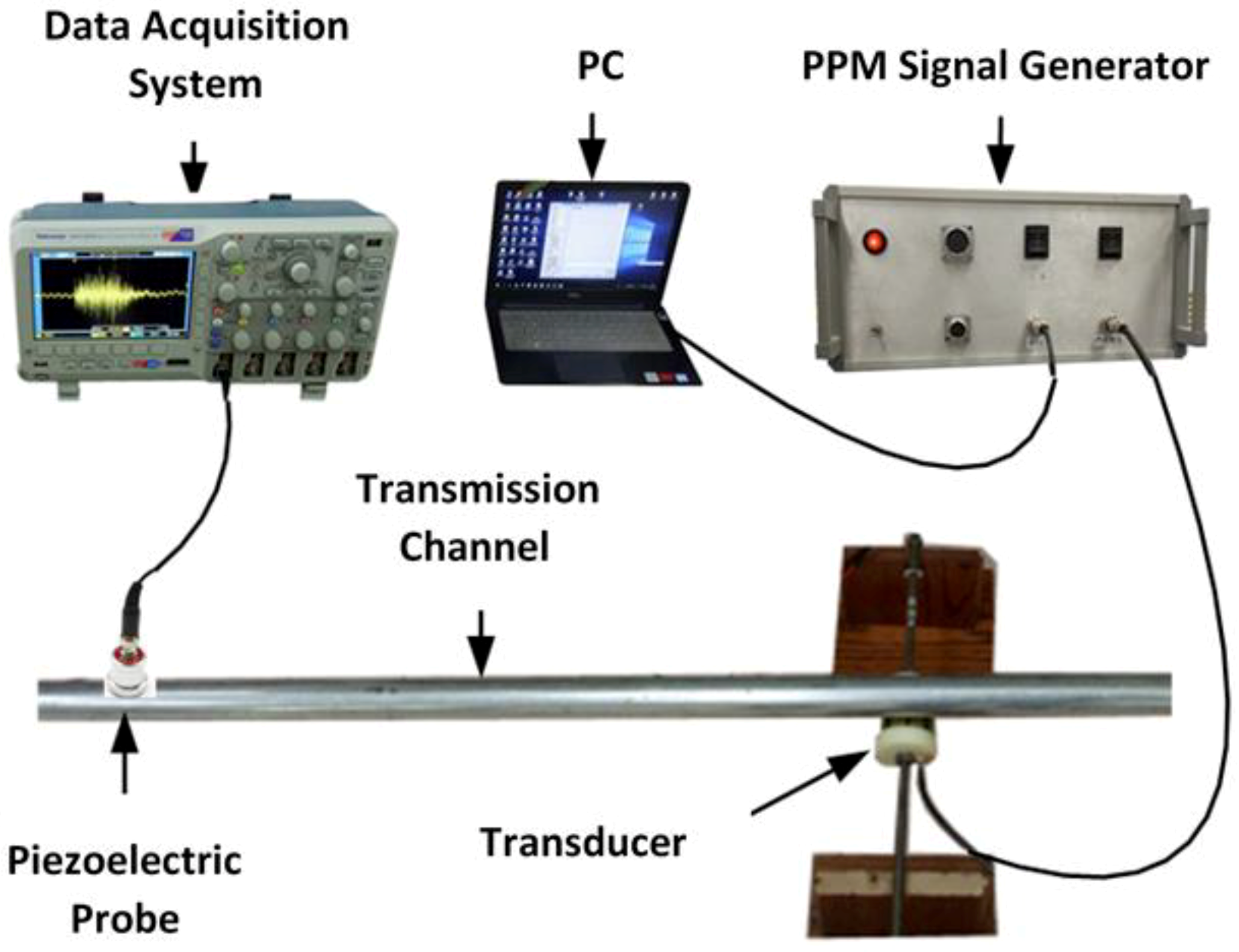
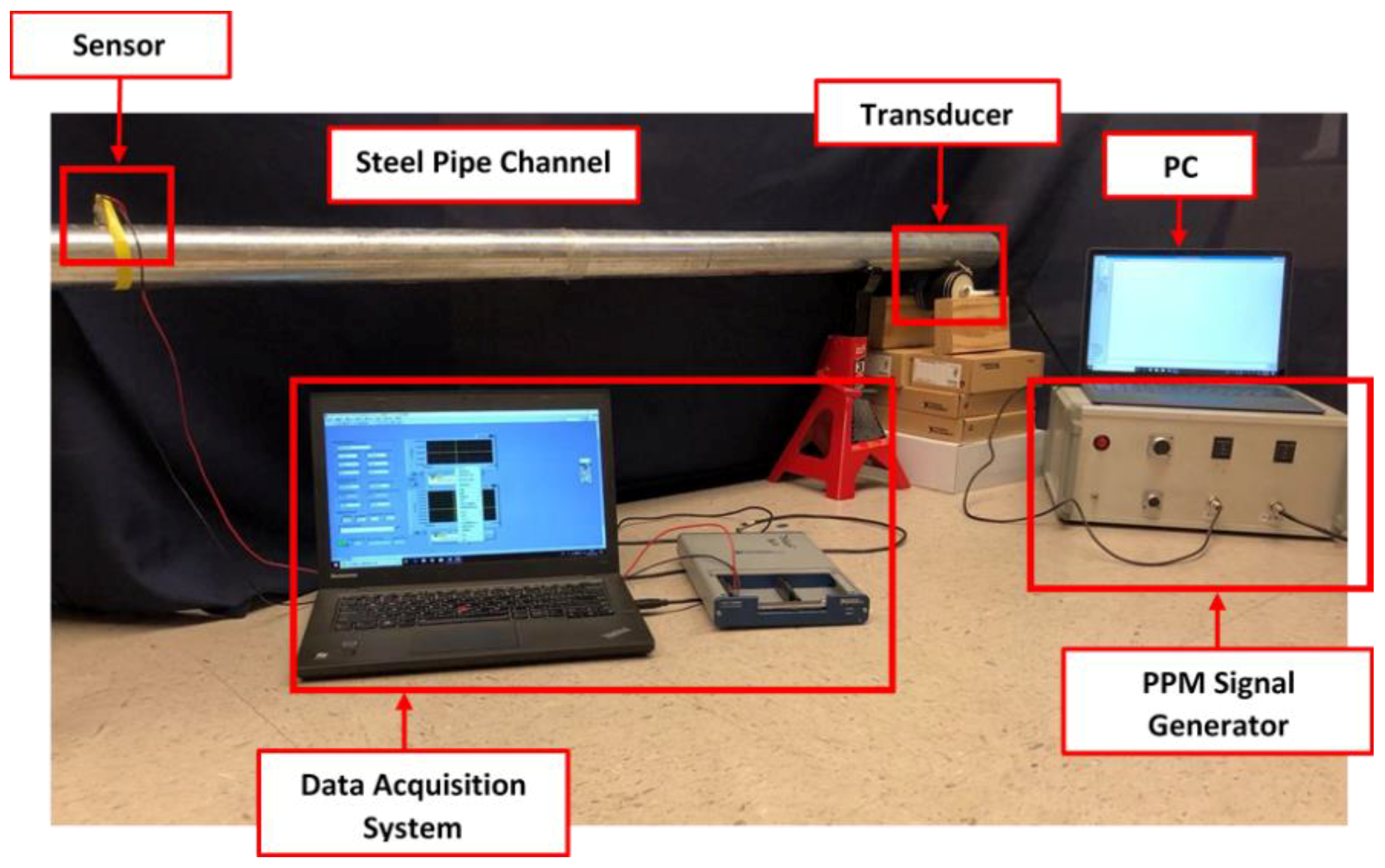
4.1. Experimental Setup
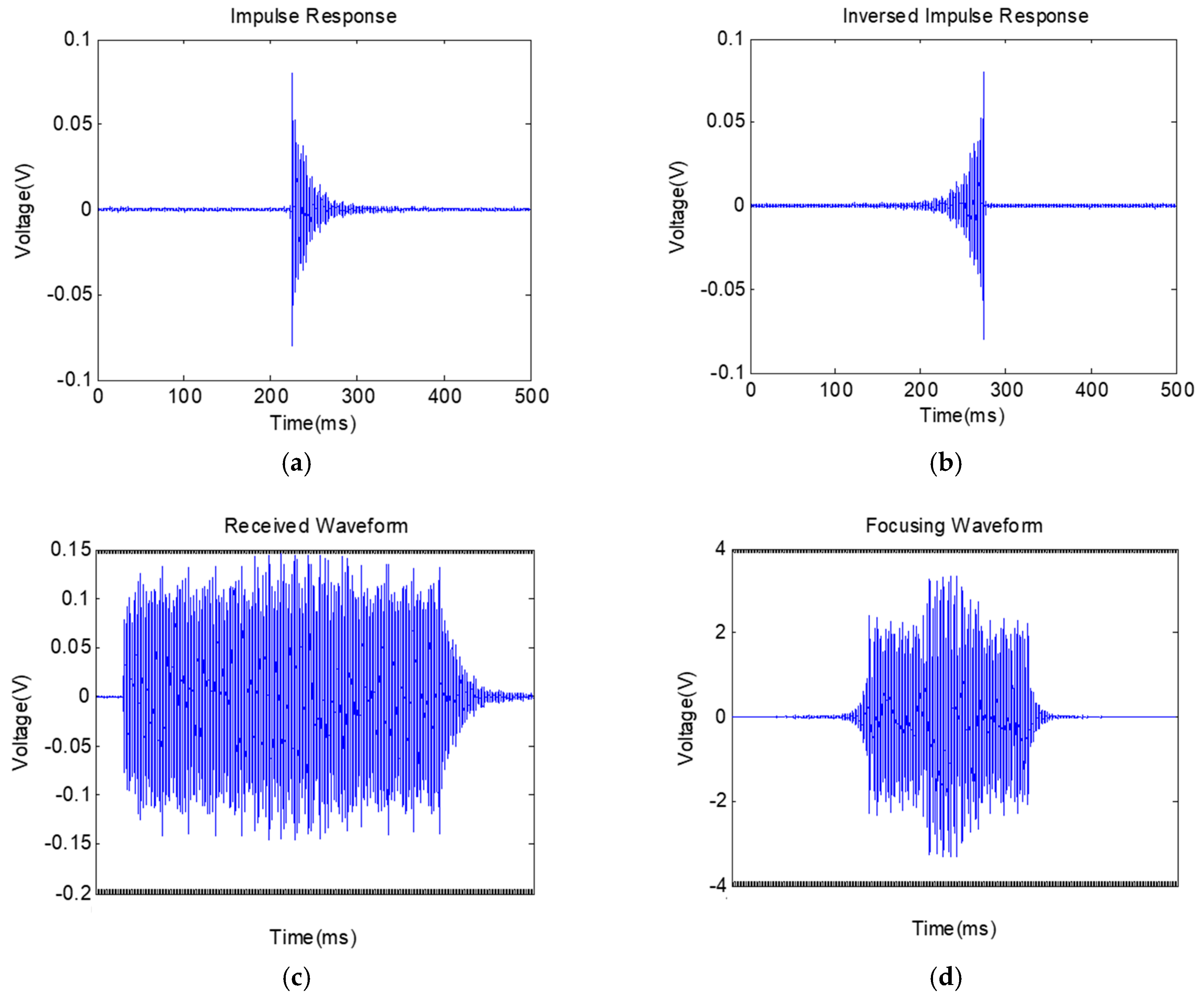
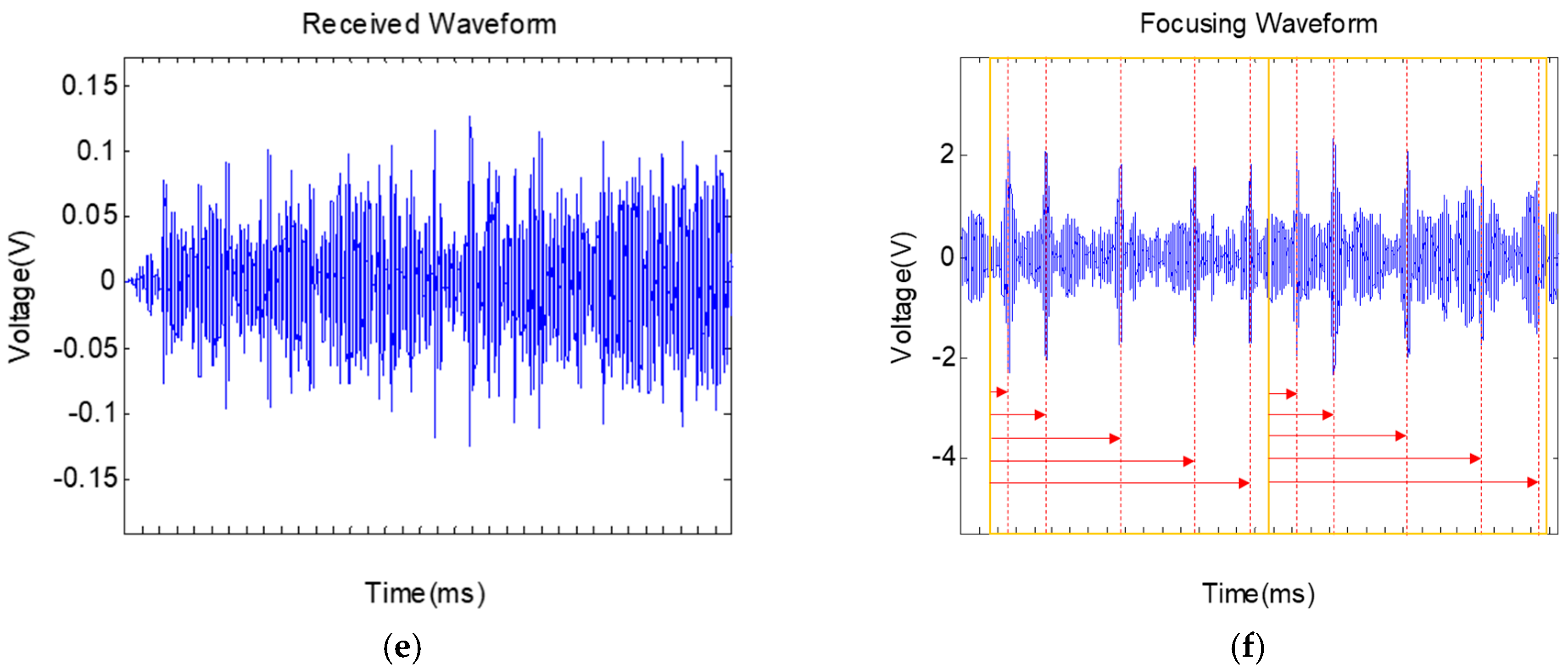
4.2. Experimental Results
4.3. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Johnson, C.C. A Seismic Communications Investigation Employing a Piezoelectric Transducer; Southwest Research Inst: San Antonio, TX, USA, 1972. [Google Scholar]
- Siu, S.; Qing, J.; Wang, K.; Song, G.; Ding, Z. Stress wave communication in concrete: II. Evaluation of low voltage concrete stress wave communications utilizing spectrally efficient modulation schemes with PZT transducers. Smart Mater. Struct. 2014, 23, 125031. [Google Scholar] [CrossRef]
- Ji, Q.; Ho, M.; Zheng, R.; Ding, Z.; Song, G. An exploratory study of stress wave communication in concrete structures. Smart Struct. Syst. 2015, 15, 135–150. [Google Scholar] [CrossRef]
- Barnes, T.G.; Kirkwood, B.R. Passbands for acoustic transmission in an idealized drill string. J. Acoust. Soc. Am. 1972, 51, 1606–1608. [Google Scholar] [CrossRef]
- Sinanovic, S.; Johnson, D.H.; Shah, V.V.; Gardner, W.R. Data Communication along the Drill String Using Acoustic Waves. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Ji, Q.; Ding, Z.; Wang, N.; Pan, M.; Song, G. A Novel Waveform Optimization Scheme for Piezoelectric Sensors Wire-Free Charging in the Tightly Insulated Environment. IEEE Internet Things J. 2018, 5, 1936–1946. [Google Scholar] [CrossRef]
- Connor, D.J.; Cummings, G.F.; Star, M.J. Acoustic Transformer with Non-Piezoelectric Core. U.S. Patent No. 5,594,705, 14 January 1997. [Google Scholar]
- Venugopal, V.P.; Wang, G. Modeling and analysis of Lamb wave propagation in a beam under lead zirconate titanate actuation and sensing. J. Intell. Mater. Syst. Struct. 2015, 26, 1679–1698. [Google Scholar] [CrossRef]
- Agrawal, B.N.; Elshafei, M.A.; Song, G. Adaptive Antenna Shape Control Using Piezoceramic Actuator. IAF Acta Astronaut. J. 1997, 40, 821–826. [Google Scholar] [CrossRef]
- Wang, F.; Ho, S.C.M.; Huo, L.; Song, G. A Novel Fractal Contact-Electromechanical Impedance Model for Quantitative Monitoring of Bolted Joint Looseness. IEEE Access 2018, 6, 40212–40220. [Google Scholar] [CrossRef]
- Shao, J.; Wang, T.; Yin, H.; Yang, D.; Li, Y. Bolt looseness detection based on piezoelectric impedance frequency shift. Appl. Sci. 2016, 6, 298. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, N.; Ho, S.C.; Song, G. Method for Rapid Impact Localization for Subsea Structures. IEEE Sens. J. 2018, 18, 3554–3563. [Google Scholar] [CrossRef]
- Fan, S.; Zhao, S.; Qi, B.; Kong, Q. Damage Evaluation of Concrete Column under Impact Load Using a Piezoelectric-Based EMI Technique. Sensors 2018, 18, 1591. [Google Scholar] [CrossRef]
- Xu, K.; Deng, Q.; Cai, L.; Ho, S.; Song, G. Damage detection of a concrete column subject to blast loads using embedded piezoceramic transducers. Sensors 2018, 18, 1377. [Google Scholar] [CrossRef]
- Liu, T.; Zou, D.; Du, C.; Wang, Y. Influence of axial loads on the health monitoring of concrete structures using embedded piezoelectric transducers. Struct. Health Monit. 2017, 16, 202–214. [Google Scholar] [CrossRef]
- Wang, F.; Huo, L.; Song, G. A piezoelectric active sensing method for quantitative monitoring of bolt loosening using energy dissipation caused by tangential damping based on the fractal contact theory. Smart Mater. Struct. 2017, 27, 015023. [Google Scholar] [CrossRef]
- Lu, G.; Li, Y.; Zhou, M.; Feng, Q.; Song, G. Detecting Damage Size and Shape in a Plate Structure Using PZT Transducer Array. J. Aerosp. Eng. 2018, 31, 04018075. [Google Scholar] [CrossRef]
- Fan, X.; Li, J.; Hao, H.; Ma, S. Identification of Minor Structural Damage Based on Electromechanical Impedance Sensitivity and Sparse Regularization. J. Aerosp. Eng. 2018, 31, 04018061. [Google Scholar] [CrossRef]
- Siu, S.; Ji, Q.; Wu, W.; Song, G.; Ding, Z. Stress wave communication in concrete: I. Characterization of a smart aggregate based concrete channel. Smart Mater. Struct. 2014, 23, 125030. [Google Scholar] [CrossRef]
- Ji, Q.; Parvasi, S.M.; Ho, S.C.M.; Franchek, M.; Song, G. Wireless energy harvesting using time reversal technique: An experimental study with numerical verification. J. Intell. Mater. Syst. Struct. 2017, 28, 2705–2716. [Google Scholar] [CrossRef]
- Huynh, T.C.; Kim, J.T. Impedance-based cable force monitoring in tendon-anchorage using portable PZT-interface technique. Math. Probl. Eng. 2014, 2014, 784731. [Google Scholar] [CrossRef]
- Huynh, T.C.; Kim, J.T. Quantification of temperature effect on impedance monitoring via PZT interface for prestressed tendon anchorage. Smart Mater. Struct. 2017, 26, 125004. [Google Scholar] [CrossRef]
- Huynh, T.C.; Nguyen, T.C.; Choi, S.H.; Kim, J.T. April. Impedance monitoring at tendon-anchorage via mountable PZT interface and temperature-effect compensation. Act. Passive Smart Struct. Integr. Syst. 2016, 9799, 97990A. [Google Scholar]
- Na, W.; Baek, J. A review of the piezoelectric electromechanical impedance based structural health monitoring technique for engineering structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [PubMed]
- Na, W.; Seo, D.W.; Kim, B.C.; Park, K.T. Effects of applying different resonance amplitude on the performance of the impedance-based health monitoring technique subjected to damage. Sensors 2018, 18, 2267. [Google Scholar] [CrossRef] [PubMed]
- Kong, Q.; Robert, R.H.; Silva, P.; Mo, Y.L. Cyclic crack monitoring of a reinforced concrete column under simulated pseudo-dynamic loading using piezoceramic-based smart aggregates. Appl. Sci. 2016, 6, 341. [Google Scholar] [CrossRef]
- Jiang, T.; Kong, Q.; Patil, D.; Luo, Z.; Huo, L.; Song, G. Detection of debonding between fiber reinforced polymer bar and concrete structure using piezoceramic transducers and wavelet packet analysis. IEEE Sens. J. 2017, 17, 1992–1998. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, J.; Guan, W.; Du, G. Damage Detection of Concrete-Filled Square Steel Tube (CFSST) Column Joints under Cyclic Loading Using Piezoceramic Transducers. Sensors 2018, 18, 3266. [Google Scholar] [CrossRef] [PubMed]
- Kong, Q.; Fan, S.; Bai, X.; Mo, Y.L.; Song, G. A novel embeddable spherical smart aggregate for structural health monitoring: Part I. Fabrication and electrical characterization. Smart Mater. Struct. 2017, 26, 095050. [Google Scholar] [CrossRef]
- Feng, Q.; Cui, J.; Wang, Q.; Fan, S.; Kong, Q. A feasibility study on real-time evaluation of concrete surface crack repairing using embedded piezoceramic transducers. Measurement 2018, 122, 591–596. [Google Scholar] [CrossRef]
- Kailaswar, S.; Zheng, R.; Kovitz, J.; Phung, Q.; Wang, H.; Ding, Z.; Song, G. ConcreteCom: A new communication paradigm for building structural health monitoring. In Proceedings of the Fourth ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings, Toronto, ON, Canada, 6 November 2012; pp. 131–137. [Google Scholar]
- Yang, D.-X.; Hu, Z.; Zhao, H.; Hu, H.-F.; Sun, Y.-Z.; Hou, B.-J. Through-metal-wall power delivery and data transmission for enclosed sensors: A review. Sensors 2015, 15, 31581–31605. [Google Scholar] [CrossRef]
- Lawry, T.J.; Saulnier, G.J.; Ashdown, J.D.; Wilt, K.R.; Scarton, H.A.; Pascarelle, S.; Pinezich, J.D. Penetration-free system for transmission of data and power through solid metal barriers. In Proceedings of the Military Communications Conference, Baltimore, MD, USA, 7–10 November 2011; pp. 389–395. [Google Scholar]
- Lawry, T. A High Performance System for Wireless Transmission of Power and Data through Solid Metal Enclosures. Ph.D. Thesis, Rensselaer Polytechnic Institute, Troy, NY, USA, 2011. [Google Scholar]
- Lawry, T.J.; Wilt, K.R.; Ashdown, J.D.; Scarton, H.A.; Saulnier, G.J. A high-performance ultrasonic system for the simultaneous transmission of data and power through solid metal barriers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 194–203. [Google Scholar] [CrossRef]
- Chase, R. Microcontroller Based Handheld Acoustic Communication & Power Delivery through Metallic Barriers. Ph.D. Thesis, Rensselaer Polytechnic Institute, Troy, NY, USA, 2013. [Google Scholar]
- Welle, R.P. Ultrasonic Data Communication System. U.S. Patent No. 5,982,297, 9 November 1999. [Google Scholar]
- Rein, C. Remote Energy Supply Process and System for an Electronic Information Carrier. U.S. Patent No. 6,639,872, 28 October 2003. [Google Scholar]
- Murphy, T.L. Ultrasonic Digital Communication System for a Steel Wall Multipath Channel: Methods and Results; Knolls Atomic Power Laboratory (KAPL): Niskayuna, NY, USA, 2005. [Google Scholar]
- Saulnier, G.; Scarton, H.; Gavens, A.; Shoudy, D.; Murphy, T.; Wetzel, M.; Bard, S.; Roa-Prada, S.; Das, P. P1g-4 through-wall communication of low-rate digital data using ultrasound. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 1385–1389. [Google Scholar]
- Moore, J.L.; Shah, V.V.; Gardner, W.R.; Kyle, D.G.; Mcgregor, M.D.; Beste, R.T.; Hensarling, J.K.; Sharonov, S.A. Wireless Communications in a Drilling Operations Environment. U.S. Patent No. 8,544,564, 1 October 2013. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Gardner, W.R.; Hyden, R.E.; Linyaev, E.J.; Gao, L.; Robbins, C.; Moore, J. Acoustic telemetry delivers more real-time downhole data in underbalanced drilling operations. In Proceedings of the IADC/SPE Drilling Conference, Miami, FL, USA, 21–23 February 2006. [Google Scholar]
- Kumar, L.S.; Han, W.K.; Guan, Y.L.; Sun, S.; Lee, Y.H. Optimal energy transfer pipe arrangement for acoustic drill string telemetry. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6999–7007. [Google Scholar] [CrossRef]
- Shah, V.V.; Linyaev, E.J.; Kyle, D.G.; Gardner, W.R.; Moore, J.L. Acoustic Telemetry Transceiver. U.S. Patent No. 8,040,249, 18 October 2011. [Google Scholar]
- Alenezi, A.H.; Abdi, A. Experimental results on acoustic communication through drill strings using a strain sensor receiver. J. Acoust. Soc. Am. 2017, 141, 3914. [Google Scholar] [CrossRef]
- Harper, G.; Almanza, E.; Fosså, A.; Finley, D.; Strang, G. Implementation of advanced acoustic telemetry system adds value and efficiency to well testing operations. In Proceedings of the SPE Asia Pacific Oil and Gas Conference and Exhibition, Jakarta, Indonesia, 9–11 September 2003. [Google Scholar]
- Manolakis, K.; Krüger, U.; Krüger, K.; Gutierrez-Estevez, M.; Mikulla, S.; Jungnickel, V. Borehole communication with acoustic OFDM. In Proceedings of the International OFDM-Workshop (InOWo’11), Hamburg, Germany, 31 August–1 September 2011. [Google Scholar]
- Pan, S.; Xu, Z.; Li, D.; Lu, D. Research on Detection and Location of Fluid-Filled Pipeline Leakage Based on Acoustic Emission Technology. Sensors 2018, 18, 3628. [Google Scholar] [CrossRef]
- Meng, L.; Yuxing, L.; Wuchang, W.; Juntao, F. Experimental study on leak detection and location for gas pipeline based on acoustic method. J. Loss Prev. Process Ind. 2012, 25, 90–102. [Google Scholar] [CrossRef]
- Del Giudice, S. Acoustic Pipeline Monitoring: Theory and Technology. Ph.D. Thesis, Dipartimento Di Elettronica, Informazione E Bioingegneria, Milan, Italy, 2014. [Google Scholar]
- Jin, Y.; Ying, Y.; Zhao, D. Time reversal data communications on pipes using guided elastic waves: Part II. Experimental studies. Health Monit. Struct. Biol. Syst. 2011, 7984, 79840C. [Google Scholar]
- Jin, Y.; Zhao, D.; Ying, Y. Time reversal data communication on pipes using guided elastic waves—Part I: Basic principles Proc. SPIE Health Monit. Struct. Biol. Syst. 2012, 7984, 1–12. [Google Scholar]
- Trane, G.; Mijarez, R.; Guevara, R.; Pascacio, D. PPM-based system for guided waves communication through corrosion resistant multi-wire cables. Phys. Procedia 2015, 70, 672–675. [Google Scholar] [CrossRef]
- Trane, G.; Mijarez, R.; Guevara, R.; Baltazar, A. PZT guided waves sensor permanently attached on multi-wire AWG12 cables used as communication medium. AIP Conf. Proc. 2015, 1650, 631–639. [Google Scholar]
- Trane, G.; Mijarez, R.; Guevara, R.; Baltazar, A. Guided wave sensor for simple digital communication through an oil industry multi-wire cable. Insight-Non-Destr. Test. Cond. Monit. 2018, 60, 206–211. [Google Scholar] [CrossRef]
- Chakraborty, S.; Saulnier, G.J.; Wilt, K.W.; Litman, R.B.; Scarton, H.A. Low-rate ultrasonic communication axially along a cylindrical pipe. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 547–551. [Google Scholar]
- Chakraborty, S.; Saulnier, G.J.; Wilt, K.W.; Curt, E.; Scarton, H.A.; Litman, R.B. Low-power, low-rate ultrasonic communications system transmitting axially along a cylindrical pipe using transverse waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1788–1796. [Google Scholar] [CrossRef]
- Moll, J.; De Marchi, L.; Marzani, A. Transducer-to-Transducer Communication in Guided Wave Based Structural Health Monitoring. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; pp. 1–8. [Google Scholar]
- Joseph, K.M.; Kerkez, B. Enabling communications for buried pipe networks. In Proceedings of the World Environmental and Water Resources Congress, Portland, OR, USA, 1–5 June 2014; pp. 899–910. [Google Scholar]
- Azhari, H. Propagation of Acoustic Waves in Solid Materials. In Basics of Biomedical Ultrasound for Engineers; John Wiley & Sons: Hoboken, NJ, USA, 2010; pp. 75–92. [Google Scholar]
- Macaulay, M. Introduction to Impact Engineering; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Sari, H.; Woodward, B. Underwater acoustic voice communications using digital pulse position modulation. In Proceedings of the Oceans ’97, MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; pp. 870–874. [Google Scholar]
- Tranter, W.H.; Rappaport, T.S.; Kosbar, K.L.; Shanmugan, K.S. Principles of Communication Systems Simulation with Wireless Applications; Prentice Hall: Upper Saddle River, NJ, USA, 2004; Volume 1. [Google Scholar]
- Ge, L.; Yue, G.; Affes, S. On the BER performance of pulse-position-modulation UWB radio in multipath channels. In Proceedings of the Ultra Wideband Systems and Technologies, Baltimore, MD, USA, 21–23 May 2002; pp. 231–234. [Google Scholar]
- Peng, J.; Hu, S.; Zhang, J.; Cai, C.S.; Li, L.Y. Influence of cracks on chloride diffusivity in concrete: A five-phase mesoscale model approach. Constr. Build. Mater. 2019, 197, 587–596. [Google Scholar] [CrossRef]
- Likhanova, N.V.; Nava, N.; Olivares-Xometl, O.; Domínguez-Aguilar, M.A.; Arellanes-Lozada, P.; Lijanova, I.V.; Arriola-Morales, J.; Lartundo-Rojas, L. Corrosion Evaluation of Pipeline Steel API 5L X52 in partially deaerated Produced Water with High Chloride Content. Int. J. Electrochem. Sci. 2018, 13, 7949–7967. [Google Scholar] [CrossRef]
- Xu, K.; Ren, C.; Deng, Q.; Jin, Q.; Chen, X. Real-time monitoring of bond slip between GFRP bar and concrete structure using piezoceramic transducer-enabled active sensing. Sensors 2018, 18, 2653. [Google Scholar] [CrossRef]
- Xu, J.; Wang, C.; Li, H.; Zhang, C.; Hao, J.; Fan, S. Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers. Sensors 2018, 18, 1727. [Google Scholar] [CrossRef]
- Lu, G.; Feng, Q.; Li, Y.; Wang, H.; Song, G. Characterization of ultrasound energy diffusion due to small-size damage on an aluminum plate using piezoceramic transducers. Sensors 2017, 17, 2796. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Huang, Y.; Zheng, Y. A Feasibility Study on Timber Damage Detection Using Piezoceramic-Transducer-Enabled Active Sensing. Sensors 2018, 18, 1563. [Google Scholar] [CrossRef] [PubMed]
- Du, G.; Kong, Q.; Zhou, H.; Gu, H. Multiple cracks detection in pipeline using damage index matrix based on piezoceramic transducer-enabled stress wave propagation. Sensors 2017, 17, 1812. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Mode | Wave Velocities (m/s) | |||
|---|---|---|---|---|
| Steel | Copper | Iron | Aluminium | |
| Longitudinal, C | 3650 | 3900 | 5000 | |
| Transversal, | 3200 | 2250 | 2450 | 3050 |
| Name | Parameter |
|---|---|
| Resonance frequency | 17–21 kHz |
| Static capacitance | |
| Electromechanical coupling coefficient | 0.52 |
| Operating temperature | |
| Size (outer diameter × inside diameter × height) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, A.; He, S.; Ren, Y.; Wang, N.; Ho, S.C.M.; Song, G. Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers. Sensors 2019, 19, 558. https://doi.org/10.3390/s19030558
Wu A, He S, Ren Y, Wang N, Ho SCM, Song G. Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers. Sensors. 2019; 19(3):558. https://doi.org/10.3390/s19030558
Chicago/Turabian StyleWu, Aiping, Sihong He, Yali Ren, Ning Wang, Siu Chun Michael Ho, and Gangbing Song. 2019. "Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers" Sensors 19, no. 3: 558. https://doi.org/10.3390/s19030558
APA StyleWu, A., He, S., Ren, Y., Wang, N., Ho, S. C. M., & Song, G. (2019). Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers. Sensors, 19(3), 558. https://doi.org/10.3390/s19030558