An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method

Abstract
1. Introduction
2. Development of the Integrated Wireless Sensor Node
2.1. Low-Noise Design
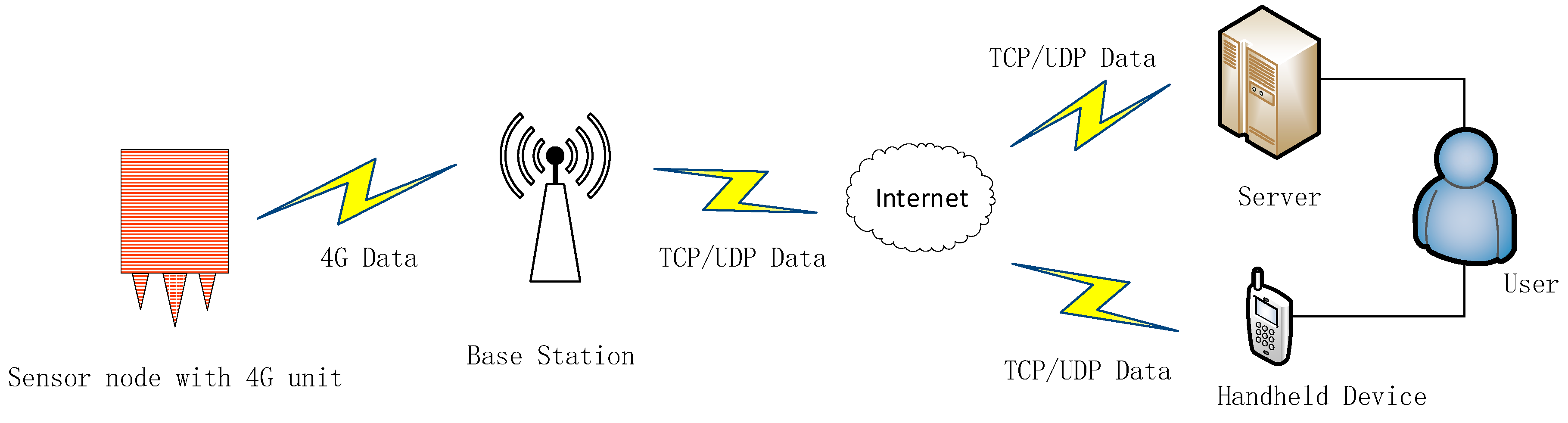
2.2. Wireless Data Quality Monitoring System Design
- Login: The node must log in to the center prior to sending the data. If the login is successful, the heartbeat will be sent at a specified interval. If the heartbeat response is not received for a specified consecutive number of times, the connection is deemed incorrect. The login process will be reinitiated and restarted if necessary.
- Data transmission: Data transmission can be divided into the request-response mode and the active reporting mode, namely, the node can actively report data and the center can also send data actively.
- Logout: An attempt is made to send an active offline packet prior to disconnecting the network. However, since the network is often unreliable at this time, the packet may be lost. The service center relies not on the data packet for judging the terminal status, but on the heartbeat timeout.
2.3. Energy-Efficient Design
3. System Testing and Field Measurement for Validation
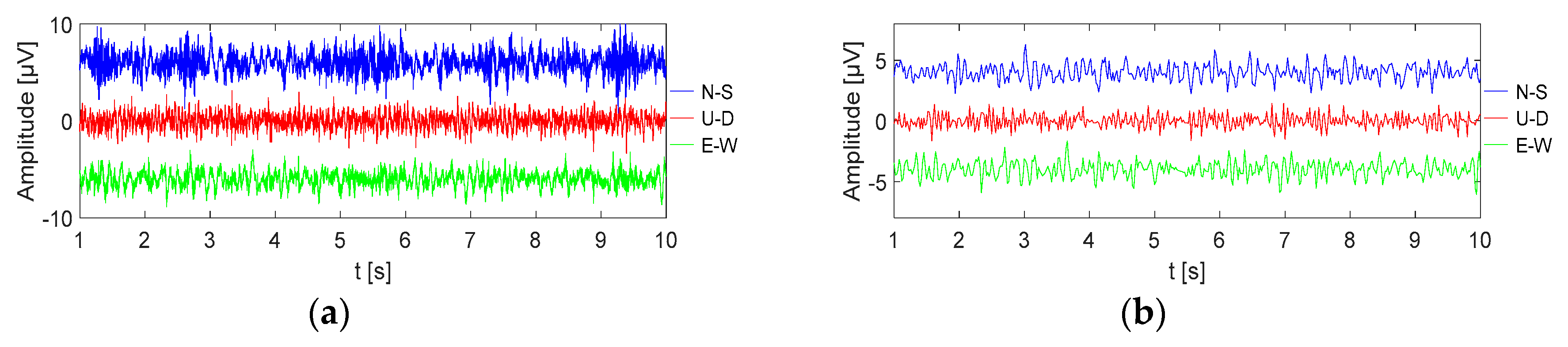
3.1. Noise-Level Test
3.2. Power Consumption Test
3.3. Performance Comparison
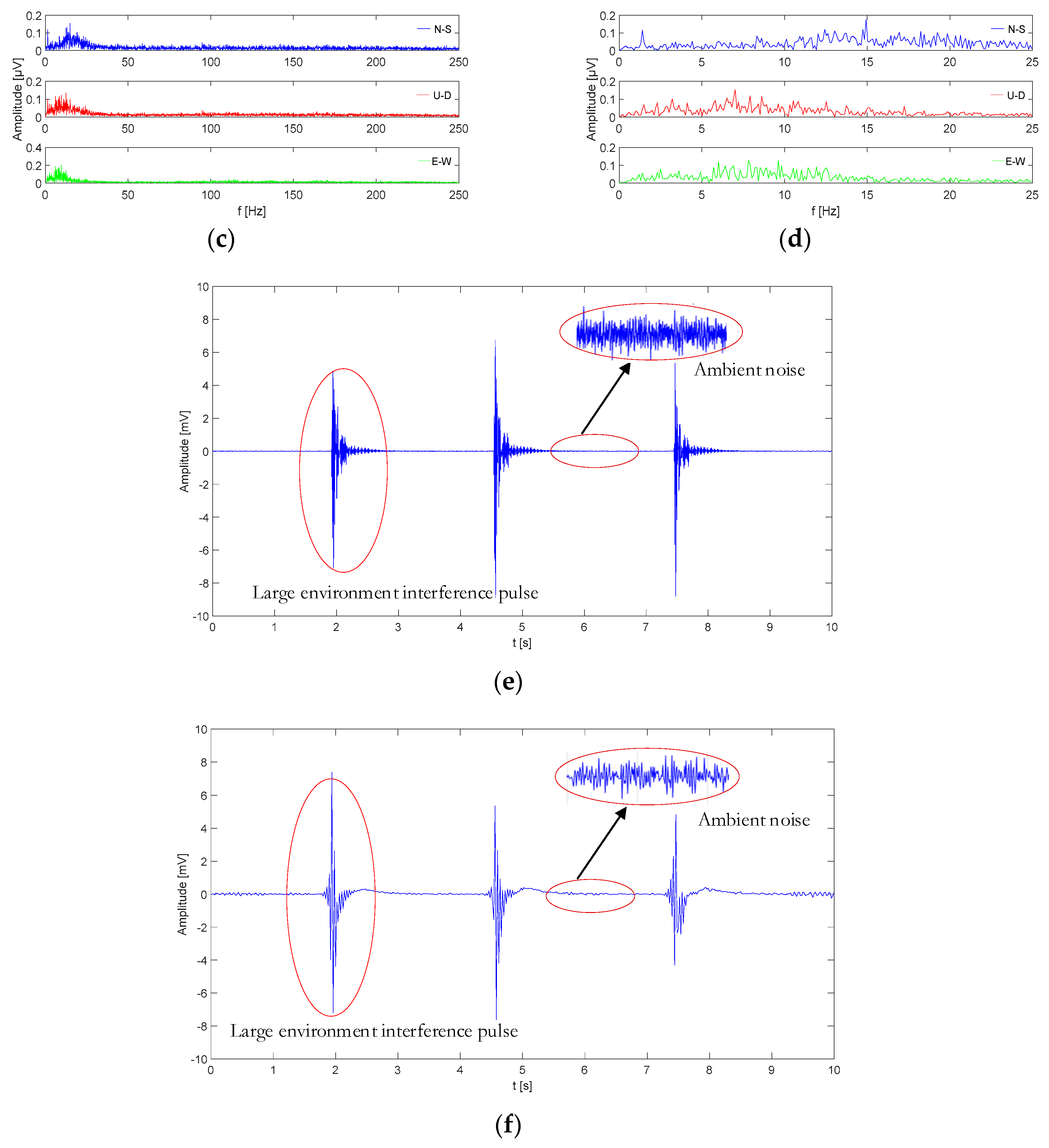
3.4. Field Measurement
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Toksoz, M.N.; Lacoss, R.T. Microtremors-mode structure and sources. Science 1968, 159, 872–873. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, Y. A method of dynamic characteristics estimation of subsurface using microtremor on the ground surface. QR Railw. Tech. Res. Inst. 1989, 30, 25–33. [Google Scholar]
- Xu, P.F.; Li, C.J.; Ling, S.Q.; Zhang, Y.B.; Hou, C.; Sun, Y.J. Mapping collapsed columns in coal mines utilizing microtremor survey methods. Chin. J. Geophys. 2009, 52, 1923–1930. [Google Scholar]
- Aki, K. Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull. Earthq. Res. Inst. 1957, 25, 415–457. [Google Scholar]
- Luo, S.; Luo, Y.H.; Zhu, L.P.; Xu, Y.X. On the reliability and limitations of the SPAC method with a directional wavefield. J. Appl. Geophys. 2016, 126, 172–182. [Google Scholar] [CrossRef]
- Francisco, J.C.; Maria, V.M.; Dimitris, G.R. Subsoil structure and site effects: A comparison between results from SPAC and HVSR in sites of complex geology. Soil Dyn. Earthquake Eng. 2014, 57, 133–142. [Google Scholar]
- Bambang, S.; Mark, J.; Michael, G.; David, L. Estimating bedrock depth in the case of regolith sites using ambient noise analysis. Eng. Geol. 2018, 243, 145–159. [Google Scholar]
- Pilz, M.; Parolai, S.; Leyton, F.; Campos, J.; Zschau, J. A comparison of site response techniques using earthquake data and ambient seismic noise analysis in the large urban areas of Santiago de Chile. Geophys. J. Int. 2009, 178, 713–728. [Google Scholar] [CrossRef]
- Pelekis, P.C.; Athanasopoulos, G.A. An overview of surface wave methods and a reliability study of a simplified inversion technique. Soil Dyn. Earthq. Eng. 2011, 31, 1654–1668. [Google Scholar] [CrossRef]
- Tian, B.Q.; Xu, P.F.; Ling, S.Q.; Du, J.G.; Xu, X.Q.; Pang, Z.H. Application effectiveness of the microtremor survey method in the exploration of geothermal resources. J. Geophys. Eng. 2017, 14, 1283–1289. [Google Scholar] [CrossRef]
- Tong, X.Q.; Lin, J.; Ji, Y.J.; Zhang, G.Y.; Xing, X.F. Global Optimization of Wireless Seismic Sensor Network Based on the Kriging Model and Improved Particle Swarm Optimization Algorithm. Wirel. Pers Commun. 2017, 95, 2203–2222. [Google Scholar] [CrossRef]
- Xu, P.F.; Ling, S.Q.; Li, C.J.; Du, J.G.; Zhang, D.M. Mapping deeply-buried geothermal faults using microtremor array analysis. Geophys. J. Int. 2012, 188, 115–122. [Google Scholar] [CrossRef]
- Arslan, M.; Joseph, A.; Ann, G. Modeling and analysis of fault detection and fault tolerance in wireless sensor networks. ACM Trans. Embedd. Comput. Syst. 2015, 3, 1–43. [Google Scholar]
- Shafiei, H.; Khonsari, A.; Derakhshi, H.; Mousavi, P. Detection and mitigation of sinkhole attacks in wireless sensor networks. J. Comput. Syst. Sci. Int. 2014, 80, 644–653. [Google Scholar] [CrossRef]
- Mohammad, A.A.; Lin, S.W.; Dusit, N.; Hwee-Pink, T. Machine Learning in Wireless Sensor Networks: Algorithms, Strategies, and Applications. IEEE Commun. Surv. Tutorials 2014, 16, 1996–2018. [Google Scholar]
- Sercel 428XL. Available online: http://www.sercel.com/products/Lists/ProductSpecification// 428XL_brochure_Sercel_CH.pdf (accessed on 5 March 2018).
- SUMMIT X Stream Pro Seismic Data Acquisition System. Available online: https://www.dmt-group.com/fileadmin/user_upload/SUMMIT_X_Stream_Pro.pdf (accessed on 6 March 2018).
- REF-TEK 151-60 Broadband Seismometer. Available online: https://www.reftek.com/support-options/ 151-60 Brochure.pdf (accessed on 6 August 2018).
- Dai, K.S.; Li, X.F.; Lu, C.; You, Q.Y.; Huang, Z.H.; Wu, H.F. A Low-Cost Energy-Efficient Cableless Geophone Unit for Passive Surface Wave Surveys. Sensors 2015, 15, 24698–24715. [Google Scholar] [CrossRef]
- Dai, K.S.; Li, X.F. Surface wave survey method and accelerometer-based field testing cases. In Proceedings of the Geo-Hubei 2014 International Conference on Sustainable Civil Infrastructure, Yichang, China, 20–22 July 2014. [Google Scholar]
- Wang, S.J.; Lu, C.; You, Q.Y.; Zhang, Y. Design of a low cost Non-cable seismic acquisition station. Chin. J. Geophys. 2015, 58, 1425–1433. [Google Scholar]
- Fehr, M.; Kremers, S.F.; Seismol, R.J. Shear-wave velocity estimation using a combination of ambient noise from small aperture array and small-scale active seismic measurements: a case study in the area of the natural gas fields of Northern Germany. J. Seismol. 2018, 22, 1359–1376. [Google Scholar] [CrossRef]
- Tifenn, R.; Abdelmadjid, B.; Yacine, C. Energy efficiency in wireless sensor networks: A top-down survey. Comput. Netw. 2014, 67, 104–122. [Google Scholar]
- Lu, C.; Wang, S.J.; Zhang, Y.; Dai, K.S.; Zhang, Y. A new low-cost no-cable digital geophone for microtremor survey. Chin. J. Geophys. 2015, 58, 2148–2159. [Google Scholar]
- Guo, S.; Zhang, H.; Zhong, Z.; Chen, J.; Cao, Q.; He, T. Detecting faulty nodes with data errors for wireless sensor networks. ACM Trans. Sens. Netw. 2014, 10, 40. [Google Scholar] [CrossRef]
- Onur, A.; Osama, A.; Serkan, K.; Mohammed, H.; Daniel, J.I. Wireless and real-time structural damage detection: A novel decentralized method for wireless sensor networks. J. Sound Vib. 2018, 424, 158–172. [Google Scholar]
- Tian, R.Y.; Lv, S.X.; Lin, J.; Zhang, L.H. Key techniques of single channel wireless storage seismograph. Chin. J. Geophys. 2017, 60, 4273–4281. [Google Scholar]
- Allwood, G.; Wild, G.; Hinckley, S. Optical Fiber Sensors in Physical Intrusion Detection Systems: A Review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef]
- Wang, M.J.; Zhang, Y.; Li, Y.S.; Cao, W. Simple-Alone High Precision Perimeter Intruder Location Warning System. Chin. J. Sci. Instrum. 2006, 27, 1718–1720. [Google Scholar]
- Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/ads1282.pdf (accessed on 10 November 2017).
- Aizawa, T.; Kimura, T.; Matsuoka, T.; Takeda, T.; Asano, Y. Application of MEMS accelerometer to geophysics. Int. J. JCRM 2009, 4, 33–36. [Google Scholar]
- Pastre, M.; Kayal, M.; Blanchard, H. A Hall sensor analog front end for current measurement with continuous gain calibration. IEEE Sens. J. 2007, 7, 860–867. [Google Scholar] [CrossRef]
- STMicroelectronics. Available online: http://www.st.com/content/st_com/en.html (accessed on 25 June 2017).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | DAQ | CPU | GPS | SD | Wireless | Ethernet | Power |
|---|---|---|---|---|---|---|---|
| Instruction idle stage | # | √* | # | # | √ | # | 90 mW |
| Standby stage | √* | √* | √* | # | √ | # | 150 mW |
| Data acquisition stage | √ | √ | √ | √ | √* | # | 220 mW |
| Failure stage | # | √* | # | # | √ | # | 90 mW |
| Data discovery stage | # | √ | # | # | # | √ | 320 mW |
| Indicator | The Proposed Sensor Node | ZLand 3C |
|---|---|---|
| Sensor | 3 Geophones, Orthogonal Configuration, 2 Hz–70% damped, 2 V/cm/s | 3 Geophones, Orthogonal Configuration, 10 Hz–70% damped, 78.7 V/m/s; 5 Hz–70% damped, 76.7 V/m/s |
| Data Channels | 3 | 3 |
| ADC Resolution | 32 bits | 24 bits |
| Sample Interval | 0.25, 0.5, 1, 2 and 4 milliseconds | 0.5, 1, 2, and 4 milliseconds |
| Preamplifier Gain | 0 dB to 36 dB in 6 dB steps | 0 dB to 36 dB in 6 dB steps |
| Digital Filter | Sinc + FIR + IIR | Linear Phase or Minimum Phase |
| Operating Life | over 30 days, Continuous | 20 days, Continuous |
| Equivalent Noise | 0.7 μVrms @ 0 dB | 0.75 μVrms @ 0 dB |
| Data Monitoring | 4G | nothing |
| Timing Accuracy | ± 10 μs, GPS Disciplined | ± 10 μs, GPS Disciplined |
| Weight | 1.85 kg | 2.8 kg, including spike |
| Dimensions | 12 cm diameter by 12 cm high | 11.7 cm diameter by 16.3 cm high |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, R.; Wang, L.; Zhou, X.; Xu, H.; Lin, J.; Zhang, L. An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method. Sensors 2019, 19, 544. https://doi.org/10.3390/s19030544
Tian R, Wang L, Zhou X, Xu H, Lin J, Zhang L. An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method. Sensors. 2019; 19(3):544. https://doi.org/10.3390/s19030544
Chicago/Turabian StyleTian, Ruyun, Longxu Wang, Xiaohua Zhou, Hao Xu, Jun Lin, and Linhang Zhang. 2019. "An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method" Sensors 19, no. 3: 544. https://doi.org/10.3390/s19030544
APA StyleTian, R., Wang, L., Zhou, X., Xu, H., Lin, J., & Zhang, L. (2019). An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method. Sensors, 19(3), 544. https://doi.org/10.3390/s19030544