Wafer-Level-Based Open-Circuit Sensitivity Model from Theoretical ALEM and Empirical OSCM Parameters for a Capacitive MEMS Acoustic Sensor


Abstract
1. Introduction
2. On-Wafer Level Based Open-Circuit Sensitivity Model
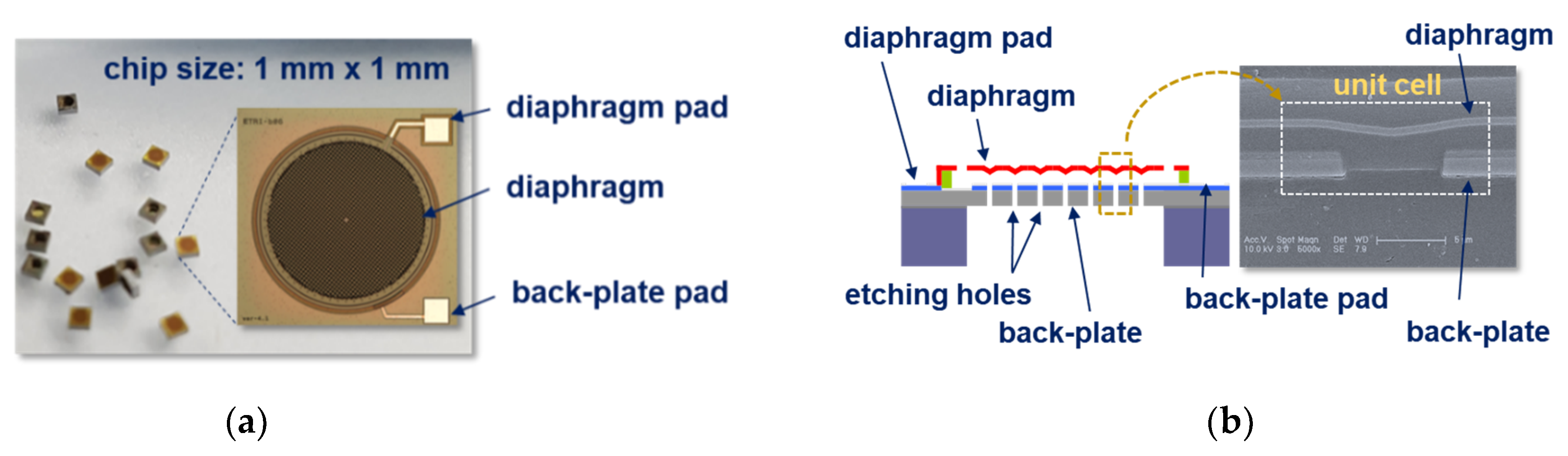
2.1. Capacitive MEMS Acoustic Sensors and Its Structure
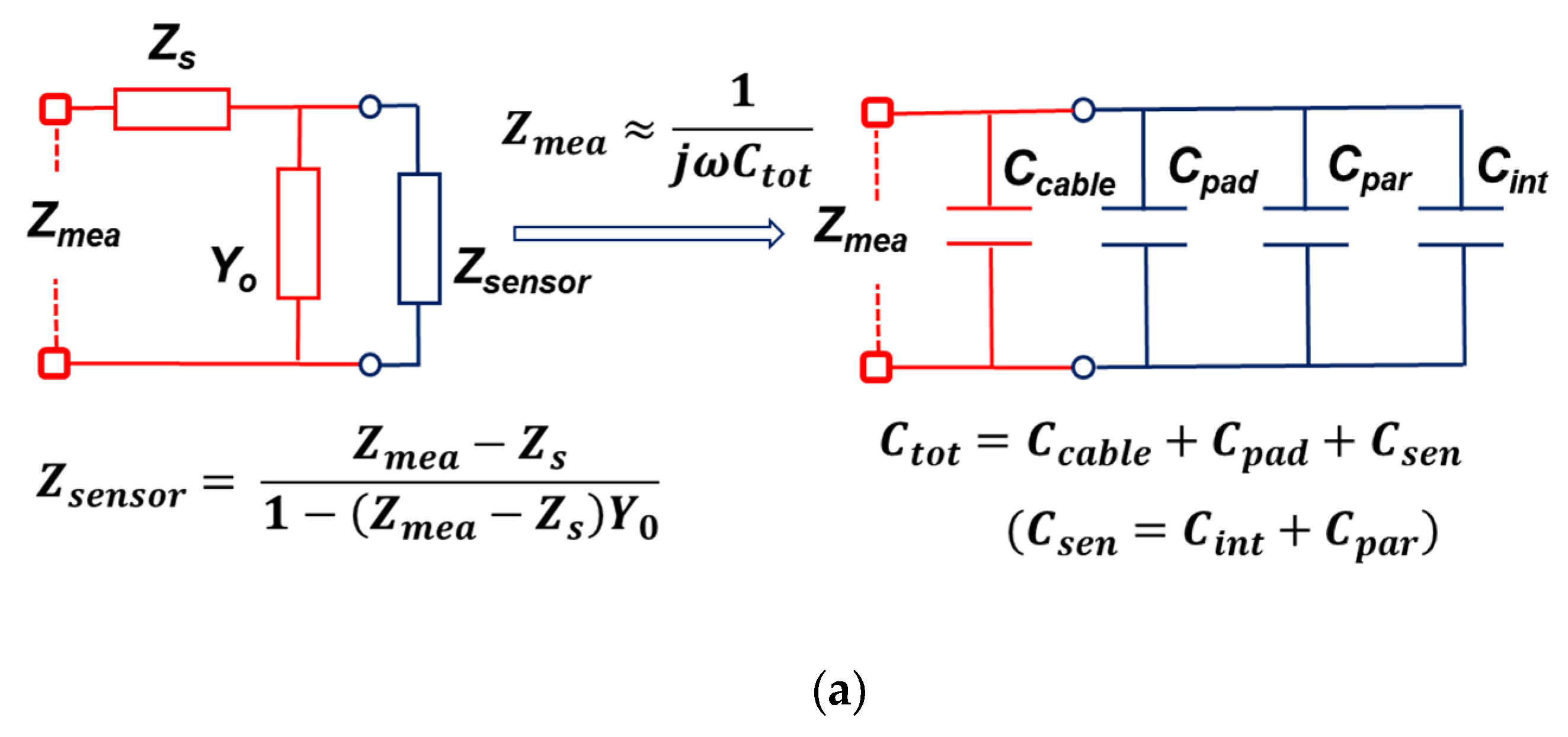
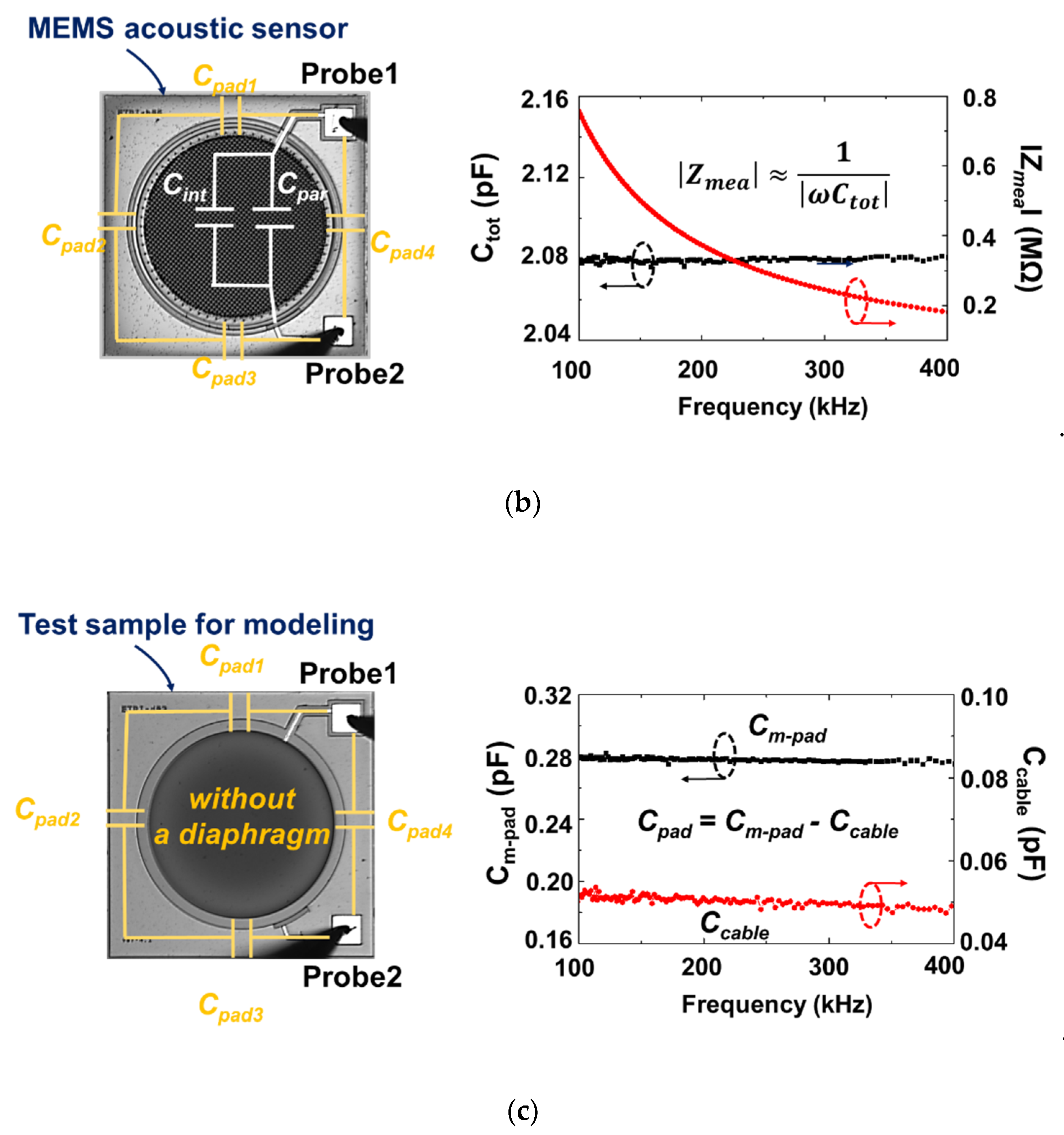
2.2. Empirical OSCM Model
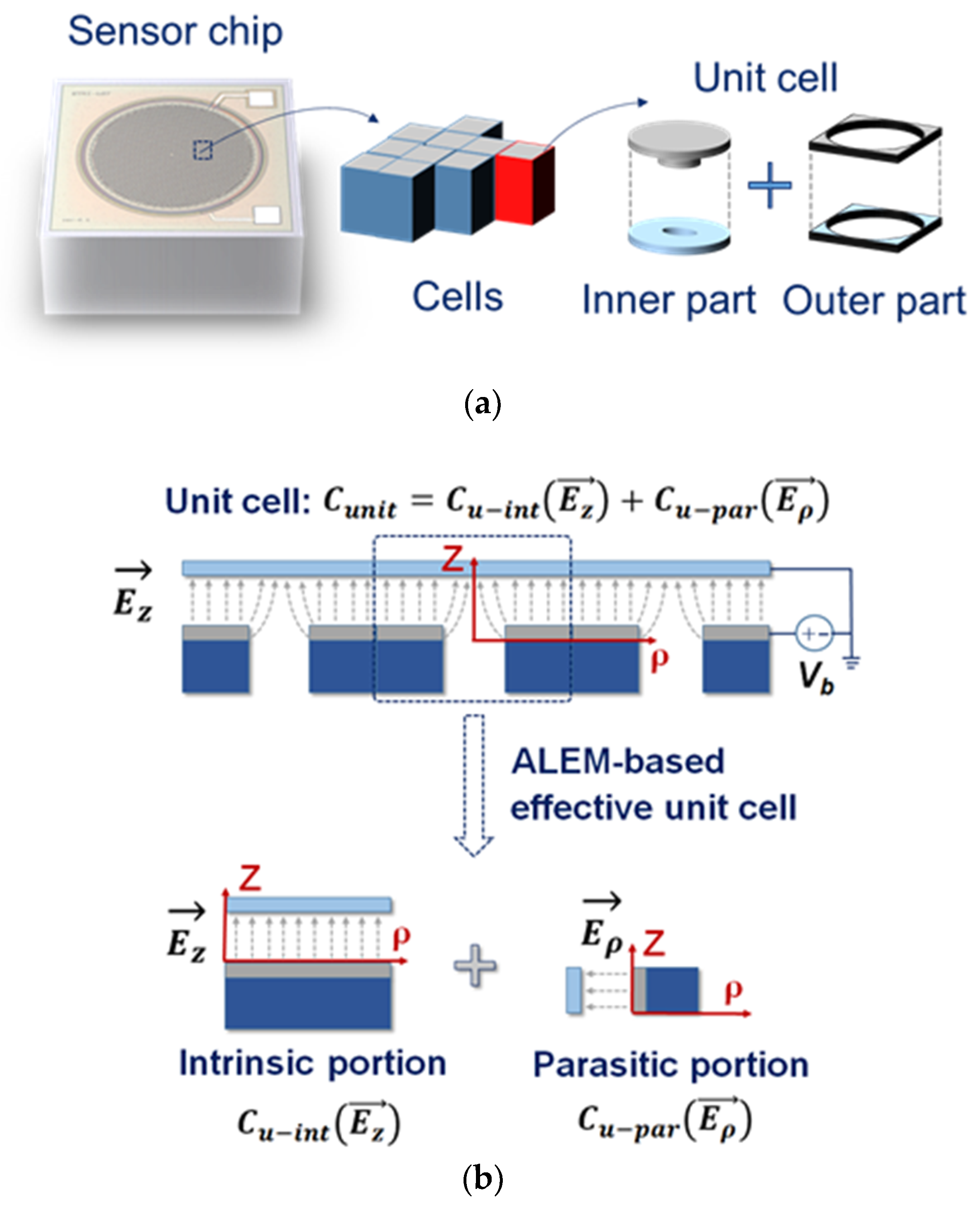
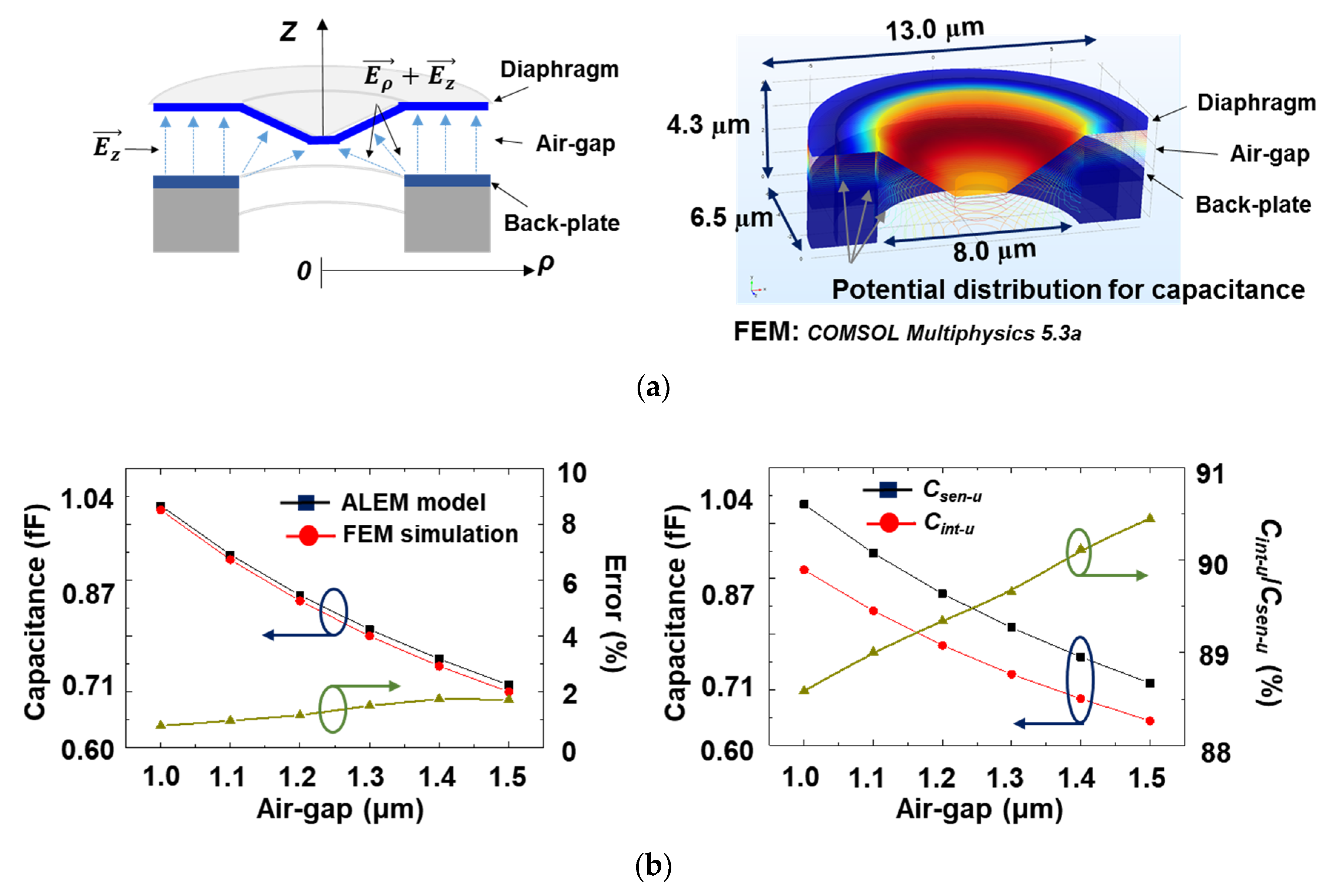
2.3. Analytical ALEM Model
2.4. Model Verification
3. Dynamic Open-Circuit Sensitivity Modeling on Wafer Level
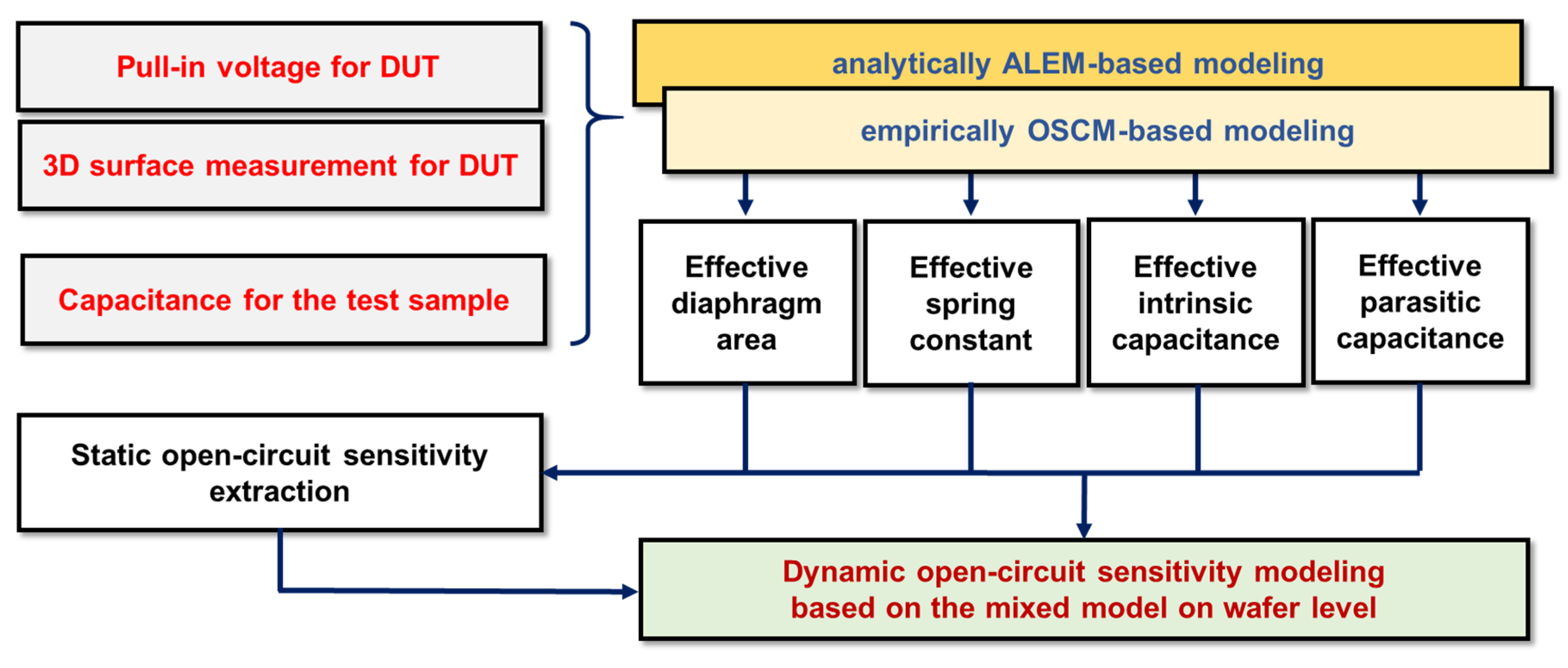
3.1. Modeling Process
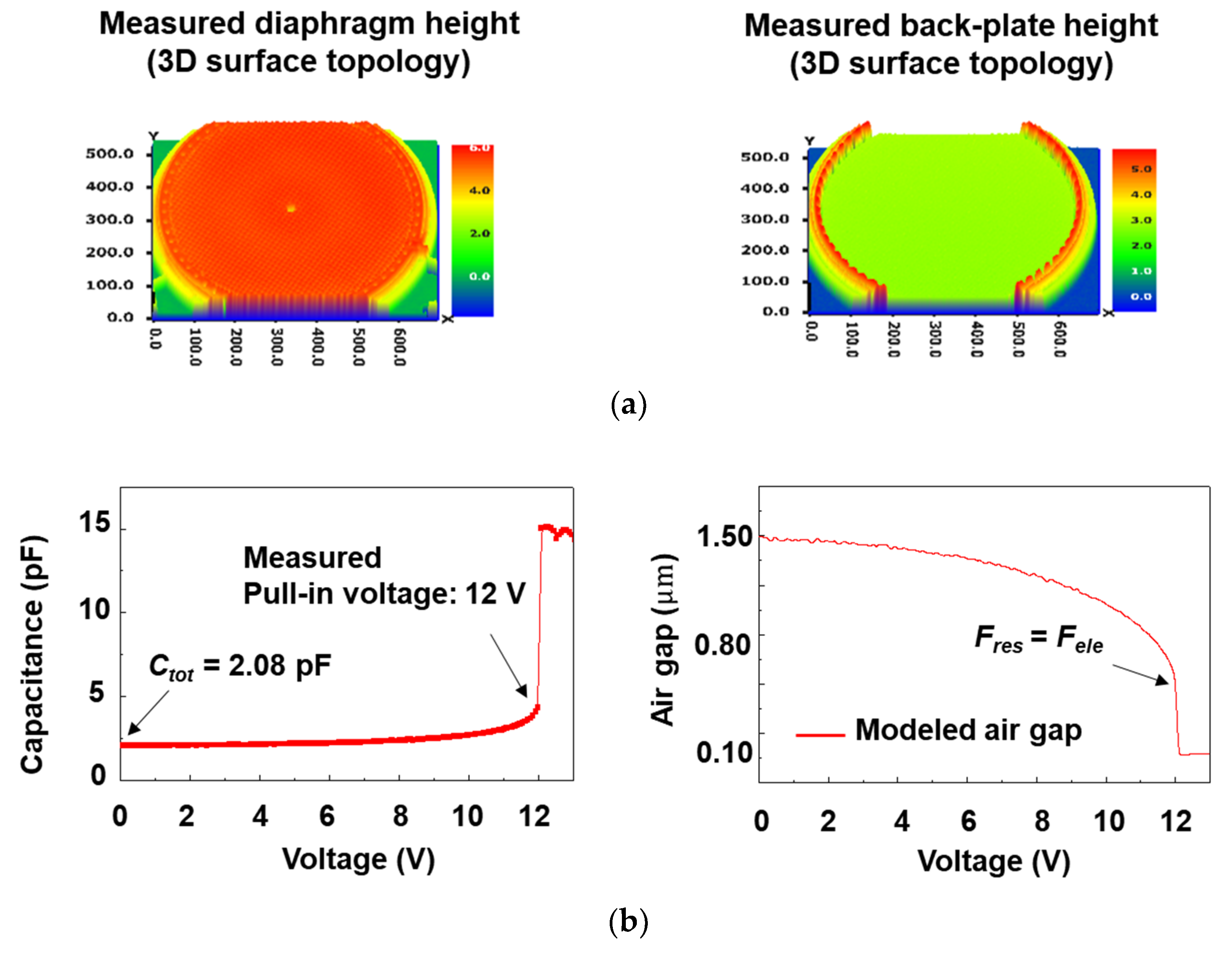
3.2. Static Characterization
3.3. Dynamic Open-Circuit Sensitivity
- Determine Ctot and Vp by measuring the voltage-capacitance relation of the DUT with an impedance analyzer.
- Determine the air gap (g0) by measuring the height of the diaphragm with a 3D surface analyzer.
- Extract Cpad of sensor chip with OSCM model.
- Determine Cint and Cpar of the active area with the ALEM model.
- Model the spring constant (kmod) and the capacitor area (Amod) by extracting the voltage-electrode spacing relationship from the ALEM model and pull-in measurement results.
- Obtain a static open-circuit sensitivity (SO) at an arbitrary air gap (gb).
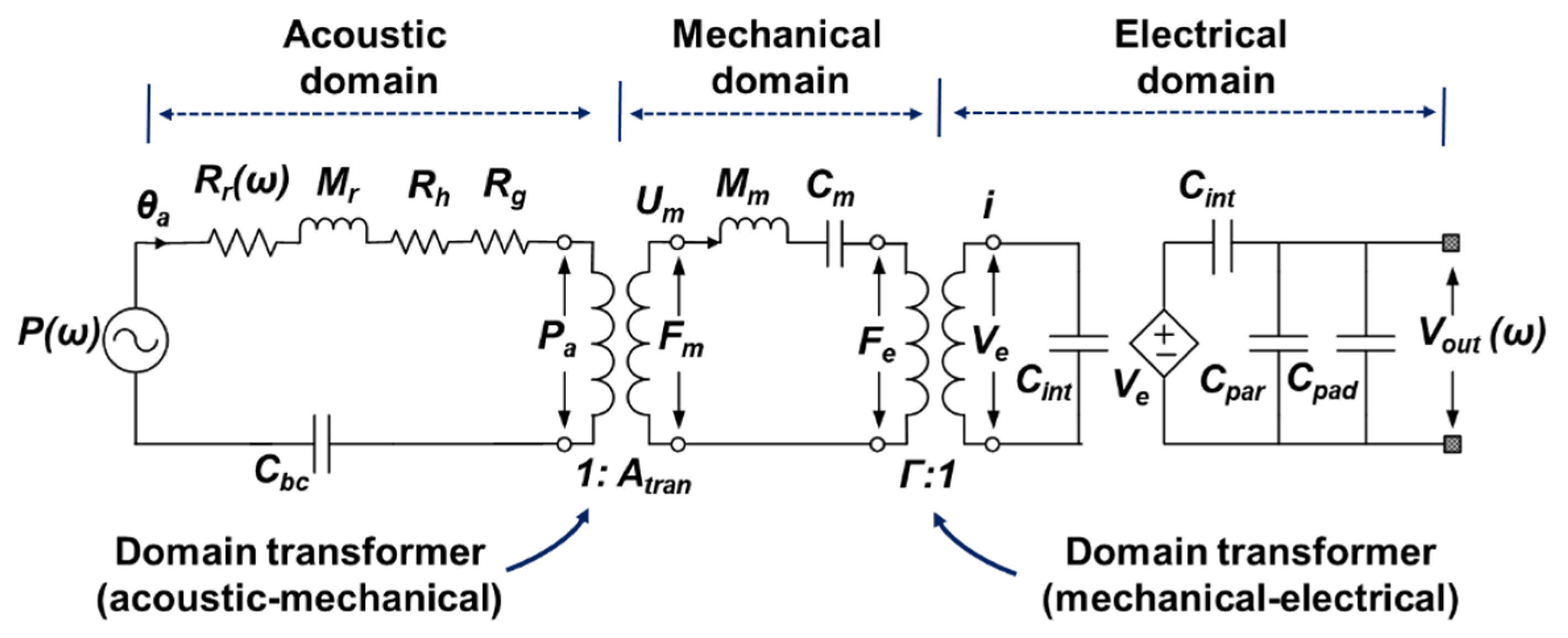
- To model the dynamic open-circuit sensitivity, we assume a distributed diaphragm as a lumped diaphragm, and determine the lumped parameters (Rr, Mr, Rh, Rg, Cbc, Mm, Cm, Cint, Cpar, and Cpad). Owing to the lumped diaphragm, the area of Mm is Atran/3 and the magnitude of the spring constant (ktran) in the dynamic range is kmod/3.
- The acoustic transduction factor (Atran) is modeled as the determined static SO is equal to dynamic SO at the condition of ω = 0.
- The electrical transduction factor (Γ) is determined as Cint·Vb/gb.
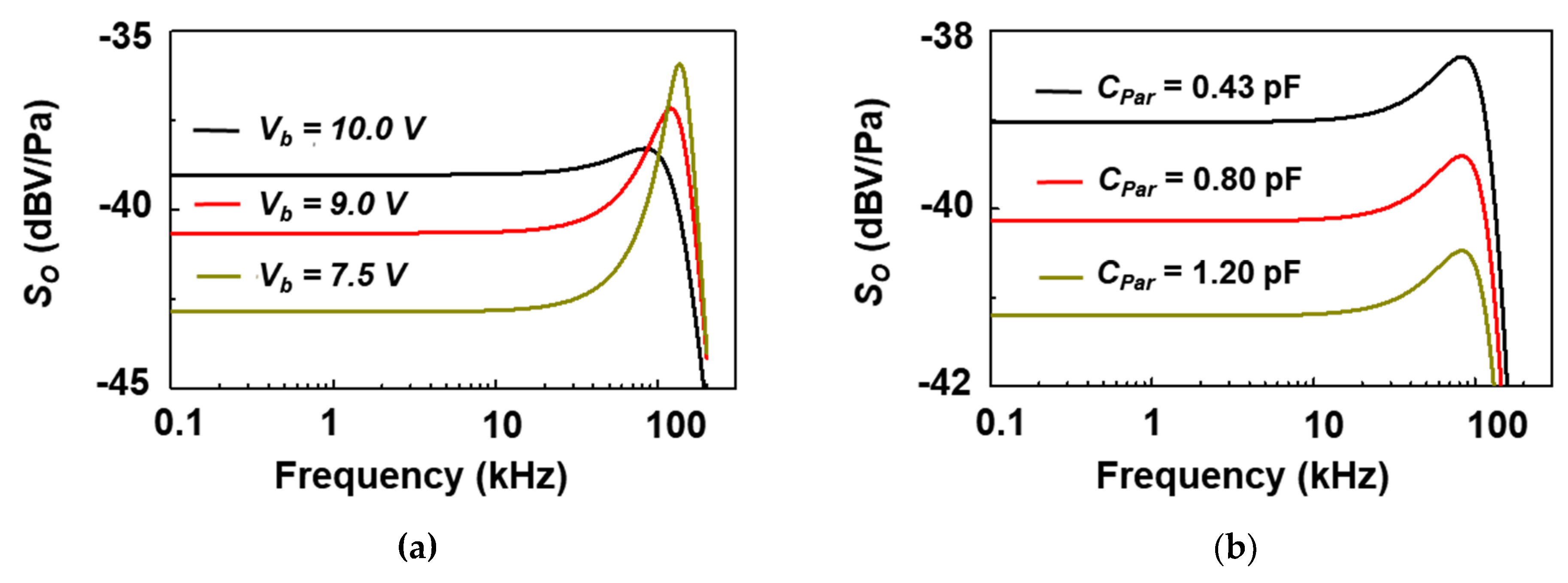
- Finally, dynamic SO is modeled with extracted lumped parameters.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Scheeper, P.R.; Donk, A.G.H.; Olthuis, W.; Bergveld, P. A review of silicon microphones. Sens. Actuators A Phys. 1994, 44, 1–11. [Google Scholar] [CrossRef]
- Bergqvist, J.; Rudolf, F. A silicon condenser microphone using bond and etch-back technology. Sens. Actuators A Phys. 1994, 45, 115–124. [Google Scholar] [CrossRef]
- Zou, Q.; Li, Z.; Liu, L. Design and fabrication of silicon condenser microphone using corrugated diaphragm technique. IEEE J. Microelectromech. Syst. 1996, 5, 197–204. [Google Scholar]
- Torkkeli, A.; Rusanen, O.; Saarilahti, J.; Seppa, H.; Sipola, H.; Hietanen, J. Capacitive microphone with low-stress polysilicon membrane and high-stress polysilicon backplate. Sens. Actuators A Phys. 2000, 85, 116–123. [Google Scholar] [CrossRef]
- Weigold, J.W.; Brosnihan, T.J.; Bergeron, J.; Zhang, X. A MEMS condenser microphone for consumer applications. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, Instanbul, Turkey, 22–26 January 2006. [Google Scholar]
- Her, H.-C.; Wu, T.-L.; Huang, J.H. Acoustic analysis and fabrication of microelectromechanical system capacitive microphones. J. Appl. Phys. 2008, 104, 084509-9. [Google Scholar] [CrossRef]
- Lee, J.; Je, C.-H.; Yang, W.S.; Kim, Y.G.; Cho, M.H.; Kim, J. Thin MEMS microphone based on package-integrated fabrication process. Electron. Lett. 2012, 48, 866–867. [Google Scholar] [CrossRef]
- Dehé, A.; Wurzer, M.; Füldner, M.; Krumbein, U. The infineon silicon MEMS microphone. In Proceedings of the AMA Conferences 2013, Nürnberg, Germany, 14–16 May 2013; pp. 95–99. [Google Scholar]
- Lee, J.; Jeon, J.H.; Je, C.H.; Kim, Y.-G.; Lee, S.Q.; Yang, W.S.; Lee, J.S.; Lee, S.-G. A concave-patterned TiN/PECVD-Si3N4/TiN diaphragm MEMS acoustic sensor based on a polyimide sacrificial layer. J. Micromech. Microeng. 2015, 15, 125022. [Google Scholar] [CrossRef]
- Walser, S.; Siegel, C.; Winter, M.; Feiertag, G.; Loibl, M.; Leidl, A. MEMS microphones with narrow sensitivity distribution. Sens. Actuators A Phys. 2016, 247, 663–670. [Google Scholar] [CrossRef]
- Lee, J.; Jeon, J.H.; Kim, Y.-G.; Lee, S.Q.; Yang, W.S.; Lee, J.S.; Lee, S.-G. TiN/PECVD-Si3N4/TiN diaphragm-based capacitive-type MEMS acoustic sensor. Electron. Lett. 2016, 52, 468–470. [Google Scholar] [CrossRef]
- Malcovati, P.; Baschirotto, A. The evolution of integrated interfaces for MEMS microphones. Micromachines 2018, 9, 323. [Google Scholar] [CrossRef] [PubMed]
- Peña-García, N.N.; Aguilera-Cortés, L.A.; González-Palacios, M.A.; Raskin, J.-P.; Herrera-May, A.L. Design and modeling of a MEMS dual-backplate capacitive microphone with spring-supported diaphragm for mobile device applications. Sensors 2018, 18, 3545. [Google Scholar] [CrossRef] [PubMed]
- Ganji, B.A.; Sedaghat, S.B.; Roncaglia, A.; Belsito, L.; Ansari, R. Design, modeling, and fabrication of crab-shape capacitive microphone using silicon-on-isolator wafer. J. Micro Nanolithogr. MEMS MOEMS 2018, 17, 015002. [Google Scholar] [CrossRef]
- Lee, J.; Im, J.-P.; Kim, J.-H.; Lim, S.-Y.; Moon, S.-E. Equivalent circuit-based open-circuit sensitivity modelling of a capacitive-type MEMS acoustic sensor on wafer level. In Proceedings of the Eurosensors 2018 Conference, Graz, Austria, 9–12 September 2018. [Google Scholar]
- Sedaghat, S.B.; Ganji, B.A. A novel MEMS capacitive microphone using spring-type diaphragm. Microsyst. Technol. 2019, 25, 217–224. [Google Scholar] [CrossRef]
- Tu, W.-H.; Chu, W.-C.; Lee, C.-K.; Chang, P.-Z.; Hu, Y.-C. Effects of etching holes on complementary metal oxide semiconductor–microelectromechanical systems capacitive structure. J. Intell. Mater. Syst. Struct. 2012, 24, 310–317. [Google Scholar] [CrossRef]
- Chuang, W.-C.; Wang, C.-W.; Chu, W.-C.; Chang, P.-Z.; Hu, Y.-C. The fringe capacitance formula of microstructures. J. Micromech. Microeng. 2012, 22, 1–7. [Google Scholar] [CrossRef]
- Lee, J. ALEM-Based Dynamic Modeling for a Capacitive Acoustic Sensor. Ph.D. Thesis, Advanced Institute of Science and Technology, Seoul, Korea, 2017. [Google Scholar]
- Wygant, I.O.; Kupnik, M. Analytically calculating membrane displacement and the equivalent circuit model of a circular CMUT Cell. In Proceedings of the 2008 IEEE International Ultrasonics Symposium, Beijing, China, 2–5 November 2008. [Google Scholar]
- Rahman, M.; Chowdhury, S. A highly accurate method to calculate capacitance of MEMS sensors with circular membranes. In Proceedings of the 2009 IEEE International Conference on Electro/Information Technology, Windsor, ON, Canada, 7–9 June 2009; pp. 178–181. [Google Scholar]
- Tilmans, H.A.C. Equivalent circuit representation of electromechanical transducers: I. Lumped-parameter systems. J. Micromech. Microeng. 1996, 9, 157–176. [Google Scholar] [CrossRef]
- Hsu, P.-C.; Mastrangelo, C.H.; Wise, K.D. A high sensitivity polysilicon diaphragm condenser microphone. In Proceedings of the 98th IEEE MEMS Conference. Technical Digest, Heidelberg, Germany, 25–29 January 1998; pp. 580–585. [Google Scholar]
- Wang, W.J.; Lin, R.M.; Zou, Q.B.; Li, X.X. Modeling and characterization of a silicon condenser microphone. J. Micromech. Microeng. 2004, 14, 403–409. [Google Scholar] [CrossRef]
- Fuldner, M.; Dehe, A.; Lerch, R. Analytical analysis and finite element simulation of advanced membrane for silicon microphones. IEEE Sens. J. 2005, 5, 857–863. [Google Scholar]
- Goto, M.; Iguchi, Y.; Ono, K.; Ando, A.; Takeshi, F.; Matsunaga, S.; Ya-suno, Y.; Tanioka, K.; Tajima, T. High-performance condenser microphone with single-crystalline silicon diaphragm and backplate. IEEE Sens. J. 2007, 7, 4–10. [Google Scholar] [CrossRef]
- Wang, D.-B.; Lee, H.-L.; Chang, P. System-level modeling and experimental verification for the CMOS MEMS microphone. In Proceedings of the 2010 International Symposium on Computer, Communication, Control and Automation (3CA), Tainan, Taiwan, 5–7 May 2010. [Google Scholar]
- Oesterle, F.; Fink, F.; Kuhn, H.; Dehe, A.; Weigel, R.; Koelpin, A. A large deflection model of silicon membranes for testing intrinsic stress of MEMS microphones by measuring pull-In voltage. In Proceedings of the Smart Sensors, Actuators, and MEMS VI. Conference, Grenoble, France, 24–26 April 2013. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model 1 [22] | Model 2 [24] | Model 3 [26] | This Work | |
|---|---|---|---|---|
| Circuit model | 3 domain-based circuit | Mixed domain-based circuit | Mixed domain-based circuit | 3 domain circuit inserted with VCVS |
| Fringe field effect | Not mentioned | Not mentioned | Not mentioned | Included |
| Attenuation coefficient | Partially considered | Not considered | Partially considered | Fully considered |
| Evaluation | - | With ROIC | With ROIC | On wafer level |
| Features | Only proposed | Too simplified | Simplified | One test sample needed |
| Parameters and Characteristics | Values |
|---|---|
| Intrinsic capacitance (Cint) at the bias of 10 V | 2.26 pF |
| Parasitic capacitance (Cpar) at the bias of 10 V | 0.20 pF |
| Pad capacitance (Cpad) | 0.23 pF |
| Air gap (gb) at the bias of 10 V | 1.1 um |
| Modelled capacitor area (Amod) | 2.81 × 10−7 m2 |
| Modelled spring constant (kmod) | 190 N/m |
| Acoustic transduction factor (Atran) at the bias of 10 V | 3.69 × 10−7 m2 |
| Electrical transduction factor (Γ) at the bias of 10 V | 2.05 × 10−5 C/m |
| Dynamic open-circuit sensitivity (So) at the bias 10 V | −39.0 dBV/Pa |
| First resonance frequency (f0) at the bias 10 V | 83.1 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Im, J.-P.; Kim, J.-H.; Lim, S.-Y.; Moon, S.-E. Wafer-Level-Based Open-Circuit Sensitivity Model from Theoretical ALEM and Empirical OSCM Parameters for a Capacitive MEMS Acoustic Sensor. Sensors 2019, 19, 488. https://doi.org/10.3390/s19030488
Lee J, Im J-P, Kim J-H, Lim S-Y, Moon S-E. Wafer-Level-Based Open-Circuit Sensitivity Model from Theoretical ALEM and Empirical OSCM Parameters for a Capacitive MEMS Acoustic Sensor. Sensors. 2019; 19(3):488. https://doi.org/10.3390/s19030488
Chicago/Turabian StyleLee, Jaewoo, Jong-Pil Im, Jeong-Hun Kim, Sol-Yee Lim, and Seung-Eon Moon. 2019. "Wafer-Level-Based Open-Circuit Sensitivity Model from Theoretical ALEM and Empirical OSCM Parameters for a Capacitive MEMS Acoustic Sensor" Sensors 19, no. 3: 488. https://doi.org/10.3390/s19030488
APA StyleLee, J., Im, J.-P., Kim, J.-H., Lim, S.-Y., & Moon, S.-E. (2019). Wafer-Level-Based Open-Circuit Sensitivity Model from Theoretical ALEM and Empirical OSCM Parameters for a Capacitive MEMS Acoustic Sensor. Sensors, 19(3), 488. https://doi.org/10.3390/s19030488